Abstract
In this research paper, we propose a novel approach termed the inertial subgradient extragradient algorithm to solve bilevel system equilibrium problems within the realm of real Hilbert spaces. Our algorithm is capable of circumventing the necessity for prior knowledge about the Lipschitz constant of the involving bifunction and only computes the minimization of strong bifunctions onto the feasible set that is required. Under appropriate conditions, we establish strong convergence theorems for our proposed algorithms. To validate our algorithms, we illustrate a series of numerical examples. Through these examples, we demonstrate the performance of the algorithms we have put forth in this paper.
1. Introduction
Throughout this article, let H be a real Hilbert space and C be a nonempty closed convex subset of H. is set a finite index. This work studies the bilevel system of equilibrium problems (shortly, ) as follows:
where f and are finite family of bifunctions from to , such that and for every ; is the nonempty solution set of the equilibrium problem defined as follows:
The solution set of (1) is denoted as .
In the case of , we see that the can be considered on bilevel equilibrium problems, introduced in 2000 by Chadli et al. [1] and developed by Moudafi [2] (see also [3,4,5,6,7,8,9]), such that the bilevel equilibrium problem is defined by the following:
where f and g are bifunctions from to . is the nonempty solution set of the equilibrium problem defined as follows:
The authors of [10] show that the function f is strong monotonicity and of Lipschitz-type continuity. Then, the Equation (2) has a unique solution. Equation (3), referred to as the Ky Fan inequality, is an homage to the contributions of this field [11], and Equation (3) can be transformed into many special cases, for instance, fixed point problems, variational inequality problems, optimization problems, saddle point problems, and the Nash equilibrium problem in noncooperative game; see details in [12,13,14,15,16].
The proximal-like method was presented as the first methods to solve the Equation (3). This methodology, rooted in the auxiliary problem principle, was presented in [17]. Under different assumptions, the bifunction is pseudomonotone and Lipschitz-type continuous; it obtains the convergence result see more in [18]. More precisely, the method in [18] is generated by sequence and as follows:
where is a suitable parameter. In recent years, many authors paid attention to the integration of inertial techniques into traditional algorithms that aimed to modify algorithms to solve Equation (3) (see [19,20]). It is underscored that most algorithms must use the knowledge of Lipschitz-type constants of the bifunction in order to choose suitable stepsize . These constants are often limitations or not practical for actual use in practice. Nevertheless, two optimization sub-problems on the feasible set C need to be solved during each iteration, which is high overhead and affects the performance of the algorithm. To circumvent this problem, many authors introduced a self-adaptive stepsize procedure so that the knowledge of Lipschitz-type constants of the bifunction is not necessary (see [21,22]).
For the bilevel equilibrium Equation (2), there are many methods to solve Equation (2). The authors of [2] introduced a simple proximal method and obtained a weak convergence to solve Equation (2). By using the proximal method and Halpern method to solve the bilevel monotone equilibrium and fixed point problem [6]. For more bilevel equilibrium problem details and recent works on the methods to solve equilibrium problems, we refer the reader to [3,4,5,23,24].
Recently, Anh et al. [25] proposed a new explicit extragradient algorithm for solving a class of bilevel equilibriums, which is generated by
under the bifunctions f and g, which are Lipschitz continuous and monotone on C. The convergence of is obtained. Moreover, the strong convergence is obtained under the main assumptions that the Lipschitz-type constant of the bifunction is known.
Motivated and inspired by all of the above contributions, in this work, we will propose iterative algorithms for finding the solution of the bilevel system of equilibrium problems. The strong convergence of the sequence generated by the proposed method is obtained under the main assumptions that the Lipschitz-type constant of the bifunction is unknow. Finally, we present a numerical result of our algorithm, which show that our algorithm has efficiency.
2. Preliminaries
In this part, we present some definitions and lemmas in the following for proving convergent theorem. For each we have
Let .
- (i)
- f is -strongly monotone on C if
- (ii)
- f is monotone on C if
- (iii)
- f is pseudomonotone on C if
For each let be convex, and the subdifferential of at x, denoted by , is defined by
studied in [26].
Lemma 1
([15]). Let H be a real Hilbert space and C be a nonempty closed convex subset in Let be a convex, lower semicontinuous, and subdifferentialble function on Then, we have is a solution to the convex optimization problem
if and only if where denote the subdifferential of g and is the normal cone of C at
Lemma 2
([27]). Let be a sequence of non-negative real numbers, be a sequence of real numbers in with , and be a sequence of real numbers. Assume that
for all If for every subsequence of satisfying then
Lemma 3
([23]). Let be β-strongly monotone, and is L-Lipschitz continuous on every bounded subset of C. Let and . For each and , we have
where
In order to solve a solution of , we must use the following assumptions:
Conditions I
- (1)
- is convex, weakly lower semicontinuous, and subdifferentiable on H for every fixed ;
- (2)
- is weakly upper semicontinuous on H for every fixed
- (3)
- is -strongly monotone on
- (4)
- The mapping is bounded and L-Lipschitz continuous on every bounded subset of C.
Conditions II
- (1)
- is convex, weakly lower semicontinuous, and subdifferentiable on H, for every fixed .
- (2)
- is weakly upper semicontinuous on H for every fixed
- (3)
- g is pseudomonotone on C with respect to , i.e.,
- (4)
- g is Lipschitz-type continuous, i.e, there is two positive constants such that
- (5)
- g is jointly weakly continuous on in the sense that, if and converge weakly to x and y, respectively, then as
- (6)
- Let be a positive sequence such that , where satisfies the following conditions: and Moreover, the sequence such that
3. Main Results
In this part, we introduce a inertial subgradient extragradient algorithm to solve the bilevel system of equilibrium problems. The strong convergence is obtained under the Lipschitz-type constant of the bifunction, which is unknown.
The modified inertial subgradient extragradient algorithm (shortly, MISE Algorithm)
- Set and choose
- Step 1:
- Given the iterates and , setwhere
- Step 2:
- Compute
- Step 3:
- Select and computewhere
- Step 4:
- Compute . Select and compute
- Step 5:
- Set
Remark 1.
Lemma 4.
Let the bifunctions satify Condition II. It follows that the sequence generated by (7) is a nonincreasing sequence and
Proof.
Let . It obvious that
for all Therefore, is a non-increasing sequence. Since is Lipschitz-type continuous on C, there is such that
So, we have
This implies that
So, for each , we have
It follows that
for all . Thus, we conclude that exists such that
□
Lemma 5.
Let the bifunctions satify Condition II, and be sequences generated by (7). Then, for all we have
for all
Proof.
Let via the definition of the equation:
Thus,
□
Since for all , we have
Since and , we have . Using the pseudo monotoxicity of , we have , which we obtain from (9) that
Since , we have
Therefore,
So,
Since , we have
Thus,
From (10)–(12), we obtain
Therefore,
Using the definition of , we have
Theorem 1.
Let bifunctions f satisfy Condition I, and satisfy Condition II. Suppose that is a nonempty set. Then, we have the sequence generated by the MISE Algorithm, which converges to the unique solution of (BSEP).
Proof.
Under the assumptions of the bifunctions and we obtain the unique solution of the bilevel system equilibrium Equation (1), denoted as It implies that for all Thus, p is a minimum of the convex function over . Using the optimality condition, we obtain
Then, there exists such that
□
Next, we prove that generated by the MISE Algorithm converges to We divide the proof into four steps.
Step 1: We show that the sequence is bounded since
For each , there is such that
Choose . For each , we have
Therefore,
Combining Lemma 5 and (16), we have
It implies from (15) that
Therefore,
According to Remark 1, we have . There exists a constant such that
Combining (18)–(20), we obtain
Using Lemma 3 and (7), it follows that
for all , where Through induction, we obtain
Hence, the sequence is bounded.
Step 2: Show that there is such that
for all One has
for some Using (17), we obtain
It follows from (21) that
for some Combining (23) and (24), we obtain
Hence,
where
Step 3: Show that
for all Indeed, we have
Combining (18) and (22), we obtain
for all Substituting (25) into (26), we obtain
for all where
Step 4: converges to zero. Indeed, using Lemma 2, it suffices to show that
for every subsequence of satisfying Assume that is a subsequence of such that
In Step 2, one has
for all This implies that
for all Therefore
for all We know that
Taking in the above inequality, we obtain
Moreover, we can show that
and
We know that
Taking in (32) and using (29)–(31), we obtain
Since the sequence is bounded, there exists a subsequence of , which converges weakly to some such that
It follows from (31) and (27) that and converge weakly to some . Since C is closed and convex, it is also weakly closed, and thus, Next, we show that It follows from Lemma 1 and the definition of that
Therefore,
Let in (35) and taking , using the assumption of the sequence and Condition II (5), we obtain for all and for all This implies that By using (14), we obtain It follows from (34) and the above inequality that
Since and (36), we obtain
Combining Step 3 and (37) with Lemma 2, we can conclude that converges strongly to This completes the proof.
4. Numerical Example
In this section, we present a numerical example for testing the modified inertial subgradient extragradient algorithm (shortly, MISE Algorithm) to solve the bilevel system of equilibrium problems. We consider the following problem. Let and . Let the bifunction and for all be defined via
where P and Q are randomly symmetric positive definite matrices defined via
where W and V are random matrices, and is the identity matrix. are linear operators given via , which are randomly symmetric positive definite matrices for all
Note that the bifunction is n-strongly monotone on , and for fixed , we have , which is convex on . Moreover, we obtain that the subdifferential . We also obtain that the function is bounded, and are pseudomonotone on and Lipschitz-type continuous with for all
We have tested our algorithm for this example in which the dimension is expressed as follows:
the number of system The matrices P and Q are matrices of W and V, respectively, being randomly generated in the interval The linear operators are defined via where are randomly generated in C for all We choose the starting point of the MISE Algorithm and to be vectors with coordinates that are one and parameters that are as follows: ; ; ; ; ; ; ; ; and
Note that at each iteration in the MISE Algorithm, we obtain and via
and
Since is box and is a half space, and can be computed explicitly. For more details, see [21].
The experiment is performed under MATLAB R2018a running on a laptop with 2.59 GHz Intel Core i7 and 4 GB RAM. We terminate Algorithm via the stopping criterions
where to obtain the number of iteration and CPU times, and the CPU times are considered in the second unit. The results are presented in Table 1, where the following are noted:

Table 1.
The result of the modified inertial subgradient extragradient algorithm.
- The number of the tested problems denoted as N.P;
- The average number of iterations denoted as Average iteration;
- The average CPU computation times denoted as Average times.
We see the computed results reported in Table 1. The sequence generated by our proposed MISE Algorithm is convergent and effective for finding the solution of bilevel system of equilibrium problems.
Next, we present the comparison of the proposed MISE Algorithm and the extragradient subgradient Halpern method (shortly, ESH Algorithm) [23]. We consider Problem (38) in the case of the number of systems, We tested the example with the dimension , and the matrices P and Q are the matrices of W and V, respectively, being randomly generated in the interval The matrix , where are randomly generated in C. The parameters are defined as follows:
- MISE Algorithm: the starting point of ; ; ; ; ; ; ; and
- ESH Algorithm: ; ; ; and
We terminate the algorithms by stopping the criterion The results are presented in Figure 1 and Figure 2.
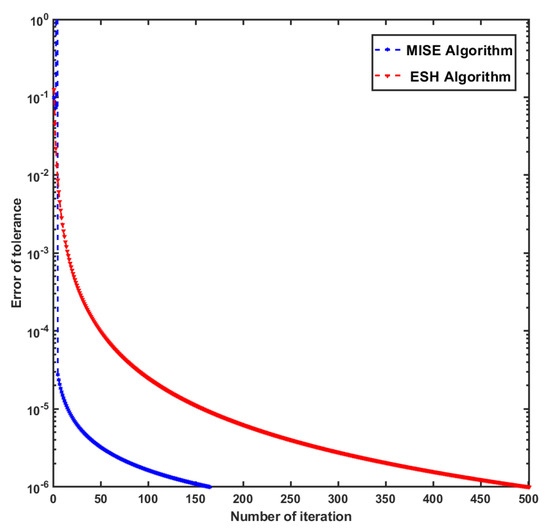
Figure 1.
The number of iterations of MISE Algorithm and ESH Algorithm, where dimension is .
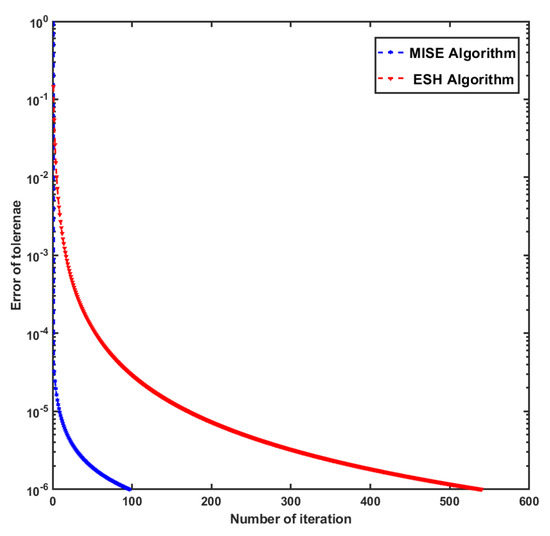
Figure 2.
The number of iterations of MISE Algorithm and ESH Algorithm, where dimension is .
5. Conclusions
We have proposed the inertial subgradient extragradient algorithms to solve the bilevel system equilibrium problems in real Hilbert spaces. Our algorithm obtained without the prior knowledge of the Lipschitz constant of the involving bifunction. Under oppropriate conditions, we obtain strong convergence theorems of our algorithms. Finally, we have presented some numerical examples and shown that our algorithms are efficient.
Author Contributions
Methodology, T.Y.; Writing—original draft, T.Y.; Supervision, S.P.; T.Y. conceived and designed the method, proved the theorem, authored and reviewed drafts of the article, and approved the final draft. S.P. approved the final draft. All authors have read and agreed to the published version of the manuscript.
Funding
This work (Grant No. RGNS 64 –195) was supported by The Office of the Permanent Secretary, Ministry of Higher Education, Science, Research and Innovation (OPS MHESI), Thailand Science Research and Innovation (TSRI) and Uttaradit Rajabhat University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank The Office of the Permanent Secretary, Ministry of Higher Education, Science, Research and Innovation (OPS MHESI), Thailand Science Research and Innovation (TSRI) for supporting by grant fund under Grant No. RGNS 64 –195. We would also like to thank Bui Van Dinh for his able guidance and support in this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chadli, O.; Chbani, Z.; Riahi, H. Equilibrium problems with generalized monotone bifunctions and applications to variational inequalities. J. Optim. Theory Appl. 2000, 105, 299–323. [Google Scholar]
- Moudafi, A. Proximal methods for a class of bilevel monotone equilibrium problems. J. Global Optim. 2010, 47, 287–292. [Google Scholar] [CrossRef]
- Bento, G.C.; Cruz Neto, J.X.; Lopes, J.O.; Soares, P.A., Jr.; Soubeyran, A. Generalized proximal distances for bilevel equilibrium problems. SIAM J. Optim 2016, 26, 810–830. [Google Scholar] [CrossRef]
- Chbani, Z.; Riahi, H. Weak and strong convergence of proximal penalization and proximal splitting algorithms for two-level hierarchical Ky Fan minimax inequalities. Optimization 2015, 64, 1285–1303. [Google Scholar] [CrossRef]
- Thuy, L.Q.; Hai, T.N. A projected subgradient algorithm for bilevel equilibrium problems and applications. J. Optim. Theory Appl. 2017, 175, 411–431. [Google Scholar] [CrossRef]
- Quy, N.V. An algorithm for a bilevel problem with equilibrium and fixed point constraints. Optimization 2014, 64, 172359–172375. [Google Scholar]
- Dinh, B.V.; Muu, L.D. Penalty and Gap Function Methods for Bilevel Equilibrium Problems. J. Appl. Math. 2011, 2011, 646452. [Google Scholar]
- Hieu, D.V.; Quy, P.K. One-Step iterative method for bilevel equilibrium problem in Hilbert space. J. Glob. Optim. 2023, 85, 487–510. [Google Scholar] [CrossRef]
- Lotfikar, R.; Eskandani, G.Z.; Kim, J.K. The subgradient extragradient method for solving monotone bilevel equilibrium problems using Bregman distance. Nonlinear Funct. Anal. Appl. 2023, 28, 337–363. [Google Scholar]
- Mastroeni, G. On auxiliary principle for equilibrium problems. Publ. Dip. Math. Dell’univ. Pisa 2000, 3, 1244–1258. [Google Scholar]
- Fan, K. A minimax inequality and applications. In Inequalities III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972; pp. 103–113. [Google Scholar]
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 127–149. [Google Scholar]
- Muu, L.D.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Bigi, G.; Castellani, M.; Pappalardo, M.; Passacanto, M. Existence and solution methods for equilibria. Eur. J. Oper. Res. 2013, 227, 1–11. [Google Scholar] [CrossRef]
- Daniele, P.; Giannessi, F.; Maugeri, A. Equilibrium Problems and Variational Models; Kluwer: Norwell, MA, USA, 2003. [Google Scholar]
- Kassay, G.; Radulescu, V. Equilibrium Problems and Applications; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Flam, S.D.; Antipin, A.S. Equilibrium programming and proximal-like algorithms. Math. Progr. 1997, 78, 29–41. [Google Scholar] [CrossRef]
- Quoc, T.D.; Muu, L.D.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Chbani, Z.; Riahi, H. Weak and strong convergence of an inertial proximal method for solving Ky Fan minimax inequalities. Optim. Lett. 2013, 7, 185–206. [Google Scholar] [CrossRef]
- Vinh, N.T.; Muu, L.D. Inertial extragradient algorithms for solving equilibrium problems. Acta Math. Vietnam. 2019, 44, 639–663. [Google Scholar] [CrossRef]
- Duc, M.H.; Thanh, H.N.T.; Huyen, T.T.T.; Dinh, B.V. Ishikawa Subgradient Extragradient Method for Equilibrium Problems and Fixed Point Problems in Hilbert Spaces. Numer. Funct. Anal. Optim. 2020, 41, 1065–1088. [Google Scholar] [CrossRef]
- Thong, D.V.; Cholamjiak, P.; Rassias, M.T.; Cho, Y.J. Strong convergence of inertial subgradient extragradient algorithm for solving pseudomonotone equilibrium problems. Optim. Lett. 2021, 16, 545–573. [Google Scholar] [CrossRef]
- Yuying, T.; Dinh, B.V.; Kim, D.S.; Plubtieng, S. Extragradient subgradient methods for solving bilevel equilibrium problems. J. Inequal. Appl. 2018, 2018, 327. [Google Scholar] [CrossRef]
- Munkong, J.; Dinh, B.V.; Ungchittrakool, K. An inertial extragradient method for solving bilevel equilibrium problems. Carpathian J. Math. 2020, 36, 91–107. [Google Scholar] [CrossRef]
- Anh, P.N.; Thanh, D.D.; Linh, N.K.; Tu, H.P. New Explicit Extragradient Methods for Solving a Class of Bilevel Equilibrium Problems. Bull. Malays. Math. Sci. Soc. 2021, 44, 3285–3305. [Google Scholar] [CrossRef]
- Iusem, A.N. On the Maximal Monotonicity of Diagonal Subdifferential Operators. J. Convex Anal. 2011, 18, 1705–1706. [Google Scholar]
- Xu, H.K. Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 2022, 66, 240–256. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).