
Alternative Derivation of the Non-Abelian Stokes Theorem in Two Dimensions


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Curvature 2-Form and Holonomy
2.1. Local Intrinsic Curvature: The Curvature 2-Form
2.2. Non-Local Intrinsic Curvature: Holonomy
3. Relation between Holonomy and Curvature Form
3.1. Loop Contraction, Homotopy, and Evaluation Surface
3.2. Near-Zero Approximation and the Non-Abelian Stokes Theorem
3.2.1. The Generalized Twisted Curvature
3.2.2. Action of Parallel Transport on Metric and Scalar Products
3.2.3. The Scalar Quantity
- 1.
- The map (43) has the following consequences:
- (a)
- Parallel transport of the covector field along satisfies
- (b)
- For which provides
- (c)
- For , ; therefore,
- 2.
- The map (44) has the following consequences:
- (a)
- Parallel transport of the vector field along satisfies
- (b)
- For which provides
- (c)
- For , which provides
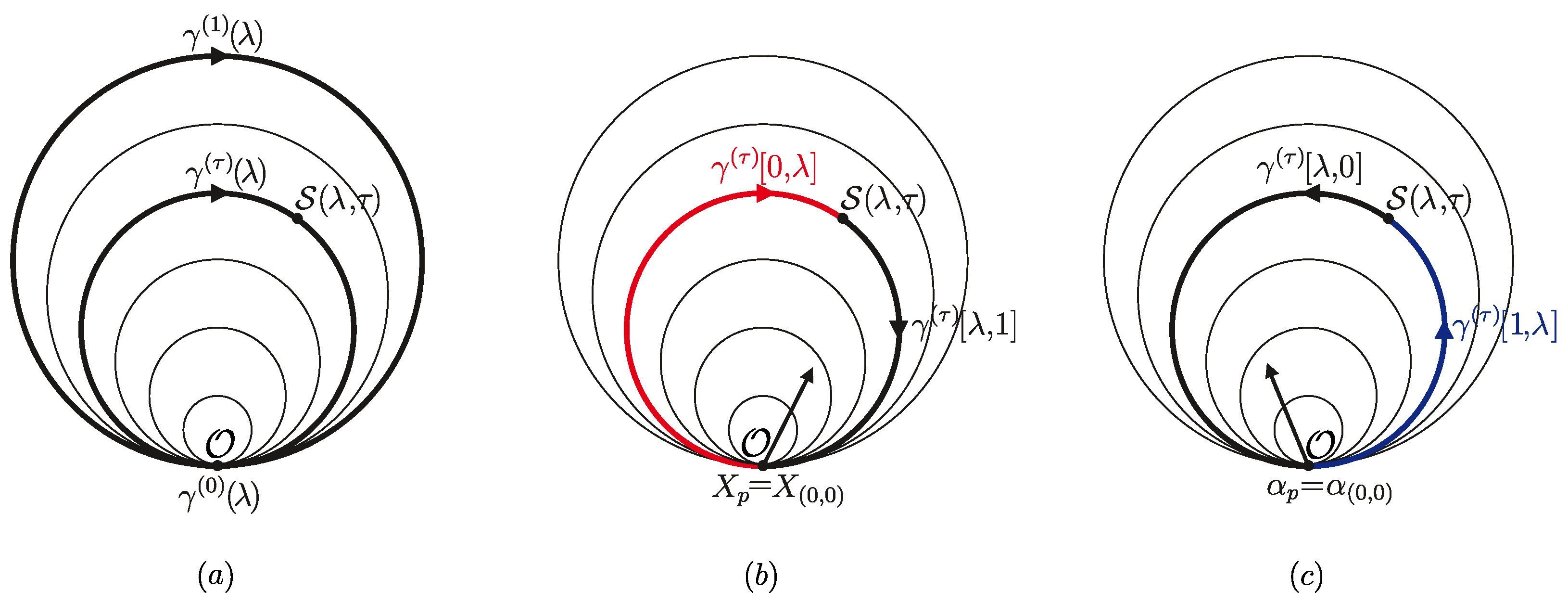
3.2.4. Different Parameterization of
- 1.
- The covariant map, as an analog to (43), is defined asSee Figure 2c for geometrical interpretation. Consequently:
- (a)
- Parallel transport of the covector field along satisfies
- (b)
- For and moreover for which provides
- (c)
- For , which provides ; therefore,
- 2.
- The contravariant map, as an analog to (44), is defined asSee Figure 2b for the geometrical interpretation. Consequently:
- (a)
- Parallel transport of the vector field along satisfies
- (b)
- Parallel transport of the vector field along satisfies
- (c)
- For which causes
- (d)
- Equations (63) and (64) together lead to .For , and with (where and are identified, see Figure 2), we have
3.2.5. Gauge Transformation and Near-Zero Approximation
3.3. The Exact Relation
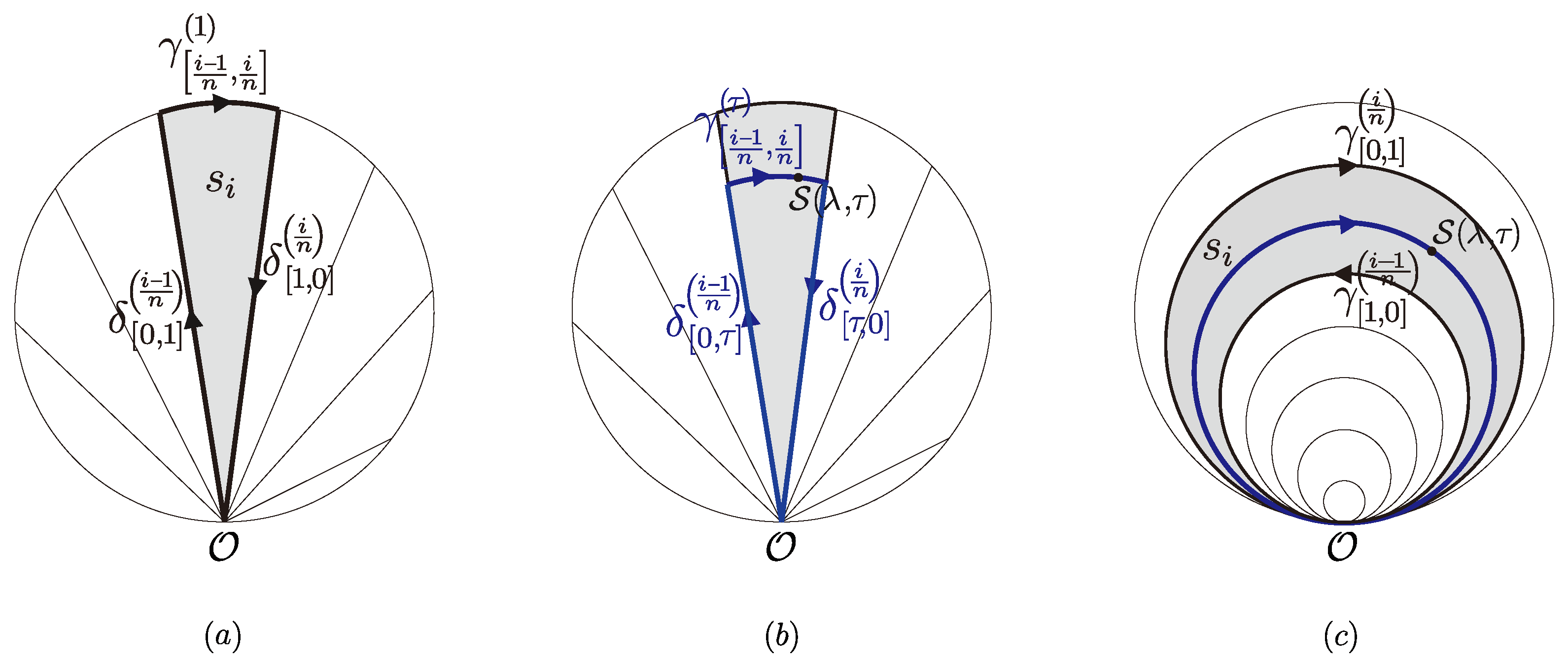
3.3.1. Finite Partition of a Surface
3.3.2. Ordered Product of Holonomies
3.3.3. The Continuous Limit and Volterra Product Integral
3.3.4. Comments on Non-Abelian Stokes Theorem
4. Discussions and Conclusions
4.1. Discussion
4.2. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cartan, É. Sur une classe remarquable d’espaces de Riemann. Bull. Soc. Math. 1926, 54, 214–264. [Google Scholar] [CrossRef]
- Cartan, É. Sur une classe remarquable d’espaces de Riemann. II. Bull. Soc. Math. 1927, 55, 114–134. [Google Scholar] [CrossRef]
- Berger, M. Sur les groupes d’holonomie homogènes de variétès à conexion affine et des variétès riemanniennes. Bull. Soc. Math. 1955, 283, 279–330. [Google Scholar]
- Ambrose, W.; Singer, I. Theorem on holonomy. Trans. Am. Math. Soc. 1953, 75, 428–443. [Google Scholar] [CrossRef]
- Aref’eva, I. Non-Abelian Stokes formula. Theor. Math. Phys. 1980, 43, 111–116. [Google Scholar] [CrossRef]
- Broda, B. Non-Abelian Stokes theorem in action. In Modern Nonlinear Optics, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001; Volume 119. [Google Scholar]
- Karp, R.L.; Mansouri, F.; Rno, J.S. Product integral formalism and non-Abelian Stokes theorem. J. Math. Phys. 1999, 40, 6033–6043. [Google Scholar] [CrossRef]
- Karp, R.L.; Mansouri, F.; Rno, J.S. Product integral representations of Wilson lines and Wilson loops, and non-Abelian Stokes theorem. Turk. J. Phys. 2000, 24, 365–384. [Google Scholar]
- Miller, W.A. The Hilbert Action in Regge Calculus. Class. Quant. Grav. 1997, 14, L199–L204. [Google Scholar] [CrossRef]
- Slavik, A. Product Integration, Its History and Applications. In History of Mathematics; Matfyzpress: Prague, Czech Republic, 2007; Volume 29. [Google Scholar]
- Baez, J.C.; Schreiber, U. Higher Gauge Theory. arXiv 2007, arXiv:math/0511710. [Google Scholar]
- Baez, J.C.; Huerta, J. An Invitation to Higher Gauge Theory. Gen. Relativ. Gravit. 2011, 43, 2335–2392. [Google Scholar] [CrossRef]
- Schreiber, U.; Waldorf, K. Parallel Transport and Functors. J. Homotopy Relat. Struct. 2009, 4, 187–244. [Google Scholar]
- Fuchs, J.; Nikolaus, T.; Schweigert, C.; Waldorf, K. Bundle Gerbes and Surface Holonomy. arXiv 2009, arXiv:0901.2085. [Google Scholar]
- Regge, T. General relativity without coordinates. Nuovo Cim. 1961, 19, 558. [Google Scholar] [CrossRef]
- Vines, J.; Nichols, D.A. Properties of an affine transport equation and its holonomy. Gen. Relativ. Gravit. 2016, 48, 127. [Google Scholar] [CrossRef]
- Breen, L.; Messing, W. Differential Geometry of Gerbes. Adv. Math. 2005, 198, 732–846. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ariwahjoedi, S.; Zen, F.P. Alternative Derivation of the Non-Abelian Stokes Theorem in Two Dimensions. Symmetry 2023, 15, 2000. https://doi.org/10.3390/sym15112000
Ariwahjoedi S, Zen FP. Alternative Derivation of the Non-Abelian Stokes Theorem in Two Dimensions. Symmetry. 2023; 15(11):2000. https://doi.org/10.3390/sym15112000
Chicago/Turabian StyleAriwahjoedi, Seramika, and Freddy Permana Zen. 2023. "Alternative Derivation of the Non-Abelian Stokes Theorem in Two Dimensions" Symmetry 15, no. 11: 2000. https://doi.org/10.3390/sym15112000
APA StyleAriwahjoedi, S., & Zen, F. P. (2023). Alternative Derivation of the Non-Abelian Stokes Theorem in Two Dimensions. Symmetry, 15(11), 2000. https://doi.org/10.3390/sym15112000