1. Introduction
M. Rosenzweig and R. MacArthur introduced in [
1] a predator–prey system in order to understand the relationship between two populations, which involves the destruction of members of one population by members of another for the purpose of obtaining food. This system is a particular case of the predator–prey system of Holling’s type II [
2,
3].
The original Rosenzweig–MacArthur predator–prey system has the following form [
1]:
where the dot denotes the derivative with respect to time
t,
denotes the prey density (#/unit of area) and
denotes the predator density (#/unit of area), the parameter
is the death rate of the predator, the function
is the prey caught by the predator per unit of time, the function
is the growth of the prey in the absence of the predator (by the logistic growth model), and
is the rate of the conversion from prey to predator.
The general case of the predator–prey systems with a Holling-type response function
P is given by the following equation:
with the same conditions on
x,
y and the parameters.
Depending of the expression of the function
P, there are four types of predator–prey Holling-type systems, as demonstrated in the following [
4]. If
, then (
2) is a predator–prey system of Holling’s type I. If
, then (
2) is a predator–prey system of Holling’s type II. In this case, the function
is an increasing function and tends to
when
, and
P is often called a Michaelis–Menten function or a response function of Holling’s type II. If
or
, where
a,
b,
m are strictly positive, then the function
P is called a response function of Holling’s type III. If
or
, then the function
P is called a response function of Holling’s type IV or a Monod–Haldane function. For more details about the predator–prey models (
2) with Holling-type functional responses, see papers [
4,
5,
6,
7,
8,
9].
The predator–prey systems with response functions of the Holling type represent the mathematical models for the slow–fast dynamics in biology; more precisely, these are models where both the death rate and the conversion rate of prey to predator are kept very small [
10].
In [
11], R. Huzak reduced the study of the Rosenzweig–MacArthur system to study a polynomial differential system. In order to do that, the first step is to perform the following rescaling:
. After once again denoting
by
and then performing a time rescaling by multiplying it with
, the obtained polynomial differential system of the third degree is as follows:
where
b,
c, and
are positive parameters.
Of course, the study of this system will only be performed in the positive quadrant of the plane where it has an ecological meaning [
11,
12].
System (
3) is a particular case of the Kolmogorov-type system. These systems were proposed by Kolmogorov in [
13] in the year 1936 as an extension of the Lotka–Volterra systems of arbitrary dimension and arbitrary degree.
The classical stability (linear or Lyapunov stability) of the Rosenzweig–MacArthur predator–prey system was completely studied in [
11,
12]. In this work, we will study another type of stability for this predator–prey system for the first time, namely the Jacobi stability.The Jacobi stability is a natural extension of the geometric stability of the geodesic flow, from a manifold with a Riemann metric or a Finsler metric to a manifold with no metric [
14,
15,
16,
17,
18,
19]. Practically, the Jacobi stability indicates the robustness of a dynamical system defined by a system of second-order differential equations (or SODE), where this robustness measures the lack of sensitivity and adaptation to both the modifications of the internal parameters of the system and the change in the external environment. By using the Kosambi–Cartan–Chern (KCC) theory, the local behavior of dynamical systems from the point of view of the Jacobi stability has recently been studied by several authors in [
15,
16,
20,
21,
22,
23,
24,
25,
26,
27]. Hence, the local dynamics of the system is investigated by using the geometric objects that correspond to the system of the second-order differential equations (SODE), which is the system obtained from the given first-order differential system [
28,
29,
30].
The KCC theory deals with the study of the deviation of neighboring trajectories, which allows us to to estimate the perturbation permitted around the equilibrium points of the second-order differential system. Initially, this approach was linked with the study of the variation equations (or Jacobi field equations) associated with the geometry on the differentiable manifold. More exactly, P.L. Antonelli, R. Ingarden, and M. Matsumoto started the study of the Jacobi stability for the geodesics corresponding to a Riemannian or Finslerian metric by deviating the geodesics and using the KCC-covariant derivative for the differential system in variations [
14,
15,
16]. As a result, the second KCC-invariant appeared, also called the deviation curvature tensor, which is essential for the establishment of the Jacobi stability for geodesics and generally for the trajectories associated with a system of second-order differential equations. In the theory of differential geometry, a system of second-order differential equations (SODE) is called semispray. Using a semispray, we can define a nonlinear connection on the manifold, and conversely, using a nonlinear connection, we can define a semispray. Consequently, any SODE can define a geometry on the manifold with the associated geometric objects, and the other way around [
17,
31,
32,
33]. Of course, these geometric objects are tensors that can check the properties of symmetry or not, depending on the particularity of the SODE.
The KCC theory originated from the works of D. D. Kosambi [
28], E. Cartan [
29], and S. S. Chern [
30]; hence, the abbreviation KCC (Kosambi–Cartan–Chern). This geometric theory can be successfully applied in many research fields, from in engineering, physics, chemistry, and biology [
20,
23,
25,
26,
27,
34]. In addition, new approaches and results from the KCC theory in gravitation and cosmology were made in [
35,
36]. Moreover, in [
22], a comprehensive analysis of the Jacobi stability and its relations with the Lyapunov stability for dynamical systems was made by C.G. Boehmer, T. Harko, and S.V. Sabau, who modeled the phenomena based on gravitation and astrophysics. Recently, in [
37], a very interesting and complete study of the Jacobi stability for prey–predator models of Holling’s type II and III was performed.
In the second section, there will be a short presentation of the Rosenzweig–MacArthur predator–prey system, and we will point out the main results on the local stability of this system. Then, in the third section, we will present a brief review of the basic notions and main tools of the KCC theory that are necessary for analyzing the Jacobi stability of dynamical systems. More exactly, we will present the five invariants of the KCC theory and the definition of the Jacobi stability. In the fourth section, a reformulation of the Rosenzweig–MacArthur predator–prey system (
3) as a system of second-order differential equations will be obtained, and the five geometrical invariants for this system will be computed. The obtained results for the Jacobi stability of this predator–prey system near the equilibrium points will be presented in section five. More precisely, we will find the necessary and sufficient conditions that would allow us to obtain the Jacobi stability of the system near the equilibrium points. Consequently, for these parameter values, it is not possible to have a chaotic behavior for the Rosenzweig–MacArthur predator–prey system. Furthermore, at the end of the fifth section, we will obtain the deviation equations near every equilibrium point as well as the curvature of the deviation vector, and then perform a comparative analysis of the Jacobi stability and the Lyapunov stability in order to compare these two approaches. Finally, a lot of very interesting examples will be presented in the sixth section and the conclusions in the seventh section. As usual in differential geometry, the sum over the crossed repeated indices is understood.
2. The Rosenzweig–MacArthur Predator–Prey System
Next, we will study the Rosenzweig–MacArthur system with the following form:
where
b,
c,
and
.
In order to find the equilibrium points of this system and following [
1,
11], by analyzing the system below:
we have at most three equilibria:
with eigenvalues , ;
with eigenvalues , ;
with eigenvalues
, where
and
Let us remark that the third equilibrium
exists only if
and
. In this case, the corresponding eigenvalues satisfy
Additionally,
whenever
exists.
Note that if , then .
The authors of [
12] obtained the following table, which describes the type of the equilibria according to the values of the parameters
b,
c, and
.
Let us remark that if , i.e., , then we have . Furthermore, in the last case, a Hopf bifurcation can occur at the equilibrium because and .
Even though the system has only two equations and three parameters, it is not so easy to obtain the behavior of the system near the equilibrium points because the system has no symmetry properties, and computations can be very difficult. However, in 2022, a deep study of the linear stability around the equilibrium points was performed by E. Diz-Pita, J. Llibre, and M. V. Otero-Espinar in the paper [
12], where the following results about the existence of limit cycles and a Hopf bifurcation at
were obtained:
Theorem 1. (a) If and , then there exists at least one limit cycle surrounding equilibrium point .
(b) The equilibrium of the Rosenzweig–MacArthur predator–prey system (4) undergoes a supercritical Hopf bifurcation at (i.e., ). For , system (4) has a unique stable limit cycle bifurcating from the equilibrium point . (c) If and , the limit cycle surrounding the equilibrium point is unique.
Consequently, based on this result, the unique limit cycle of system (
4) appeared from the equilibrium point
in a Hopf bifurcation.
Moreover, from the proof of this theorem (see [
12]), the results show that the equilibrium point
is a weak stable focus when
and
.
However, for cases 4, 6, and 7 from
Table 1, it was not proved whether limit cycles existed or not. Using the Bendixson–Dulac Theorem [
12], it was established only for some of the subcases that there are no limit cycles.
Proposition 1. If , and , then the Rosenzweig–MacArthur system (4) does not have periodic orbits in the set . Finally, for cases 4, 6, and 7 from
Table 1, the following conjecture was announced in [
12] and for which only some numerical evidences have been claimed.
Conjecture 2. If , , and , then there are no limit cycles for the Rosenzweig–MacArthur predator–prey system (4). In the next sections, we will focus only on the study of the Jacobi stability in order to clarify the behavior of the system and to confirm this conjecture.
3. Kosambi–Cartan–Chern (KCC) Geometric Theory and Jacobi Stability
Based on [
26,
27], in this section, we will make a brief presentation of the essential notions and principal results from the Kosambi–Cartan–Chern (KCC) theory [
15,
16,
20,
21,
28,
29,
30]. Although the Kosambi–Cartan–Chern (KCC) theory is based on a classical approach of dynamical systems that use the geometric tools of differential geometry, the obtained results are totally new and very useful for the study of the behavior of dynamical systems. More exactly, with every SODE (or semispray), we can associate a nonlinear connection, a Berwald connection, and then the five geometrical invariants that determine the dynamics of the system:
—the external force,
—the deviation curvature tensor,
—the torsion tensor,
—the Riemann–Christoffel curvature tensor, and
—the Douglas curvature tensor. However, fortunately, only the second invariant, the deviation curvature tensor
, determines the Jacobi stability of a dynamical system near an equilibrium point.
Next, we will introduce the main topics of the KCC theory following [
14,
15,
16,
20,
21]. If we consider
M a real, smooth
n-dimensional manifold and
its tangent bundle, then
is a point from
, with
,
, and
,
. Ordinarily,
or
M is an open subset of
. Consider the following system of second-order differential equations in normalized form [
14]:
where
are smooth functions defined in a local system of coordinates on
, usually an open neighborhood of some initial conditions
. System (
5) can be viewed similarly to a system of Euler–Lagrange equations from classical dynamics [
14,
31], such as in the following equation:
where
is a regular Lagrangian of
, and
represents the external forces.
System (
5) has a geometrical meaning if and only if “the accelerations”
and “the forces”
are
-type tensors under the following local coordinate transformation:
More precisely, System (
5) has a geometrical meaning (and it is called a semispray ) if and only if the functions
are changing under the local coordinate transformation (
7) following the rules below [
14,
31]:
The basic idea of the KCC theory is to change the system of second-order differential equations (
5) into an equivalent system (i.e., with the same solutions), but with geometrical meaning. Next, for this second-order system (SODE), we will define five tensor fields, also called geometric invariants of the KCC theory [
15,
16]. Of course, these are invariants under the local change coordinates (
7). For this purpose, we will introduce the KCC-covariant differential of a vector field
defined in an open set of
(usually
) [
15,
28,
29,
30]:
where
are the coefficients of
a nonlinear connectionN on the tangent bundle
corresponding to the semispray (
5).
For
, the following is obtained:
The contravariant vector field
is called
the first invariant of the KCC theory. This invariant represents the external force, and the term
has a geometrical character since with respect to coordinate transformation (
7), we have the following [
15]:
If the functions
are 2-homogeneous with respect to
, i.e.,
, for all
, then
for all
. Therefore, the first invariant of the KCC theory is null if and only if the semispray is a spray. This result is still available for the geodesic spray associated with a Riemann or Finsler metric [
14,
31].
The main objective of the Kosambi–Cartan–Chern theory is to study the trajectories which slightly deviate from a certain trajectory of (
5). Practically, the dynamics of the system in variations will be studied, and then the trajectories
of (
5) will be varied into nearby ones as described by the following equation:
where
is a small parameter, and
are the components of a contravariant vector field defined along the trajectories
and called
the deviation vector. Hence, after substituting (
11) into (
5) and using the limit
, the next variational equations will be obtained [
14,
15,
16]:
By using the KCC-covariant derivative from (
9), Equation (
12) can be written in the following covariant form [
14,
15,
16]:
where we have the
-type tensor
on the right side with the following components:
According to [
14,
31], the coefficients
represent
the Berwald connection that is associated with the nonlinear connection
N. If all coefficients of the nonlinear connection and the Berwald connection are identically zero, then the deviation curvature tensor from (
14) becomes
.
Then, according to [
34], we can introduce the so-called
zero-connection curvature tensor Z given by the following equation:
For two-dimensional systems, the zero-connection curvature Z corresponds to the Gaussian curvature K of the potential surface , where . When the potential surface is minimal, then we have .
The coefficients
represent the so-called
deviation curvature tensor and is
the second invariant of the Kosambi–Cartan–Chern theory. Equation (
12) is called
the deviation equations (or Jacobi equations), and the invariant Equation (
13) is also called the Jacobi equations. In Riemannian or Finslerian geometry, when the second-order system of equations represents the geodesic motion, then Equation (
12) (or even (
13)) is exactly the Jacobi field equation corresponding to the given geometry.
Finally, we can introduce the
third, the
fourth, and the
fifth invariants of the Kosambi–Cartan–Chern (KCC) theory for the second-order system of Equation (
5). These invariants are defined by the following:
From the geometrical point of view, the third KCC invariant can be interpreted as a torsion tensor. The fourth and the fifth KCC invariants and represent the Riemann–Christoffel curvature tensor and the Douglas tensor, respectively.
It is important to point out that these tensors always exist [
14,
15,
16,
21,
31].
According to [
14,
29,
31], these five invariants are the basic mathematical quantities that describe the geometrical properties of the system and give us the geometrical interpretation for an arbitrary system of second-order differential equations.
Next, we present a basic result of the KCC theory, which was obtained by P.L. Antonelli in [
15]:
Theorem 3. Two second-order differential systems of the same type as (5), such as can be locally transformed, from one into another, via changing coordinate transformation (7) if and only if the five invariants , , , , and are equivalent tensors of , , , , and , respectively. More specifically, there are local coordinates on the manifold M, for which for all i, if and only if all five invariant tensors are null. In this particular case, the trajectories of the dynamical systems are straight lines.
The term “Jacobi stability” in the Kosambi–Cartan–Chern theory comes from the fact that when (
5) represents the system of second-order differential equations for the geodesics in Riemannian or Finslerian geometry, then Equation (
13) is exactly the Jacobi field equation for the geodesic deviation. More generally, we can write the Jacobi Equation (
13) of the Finslerian manifold
in the following scalar form [
18]:
where
is the Jacobi field along the geodesic
,
is the unit normal vector field on the geodesic
, and
K is the flag curvature associated with the Finslerian
F.
Moreover, regarding the sign of the flag curvature
K, it can be said that: if
, then the geodesics bunch together (i.e., are Jacobi-stable), and if
, then the geodesics disperse (i.e., are Jacobi-unstable). Therefore, from the equivalence of (
13) and (
18), we obtain that a positive flag curvature is equivalent to the negative eigenvalues of the curvature deviation tensor
, and a negative flag curvature is equivalent to positive eigenvalues. Then, we have a well-known result from the Kosambi–Cartan–Chern theory [
22]:
Theorem 4. The trajectories of system (5) are Jacobi-stable if and only if the real parts of the eigenvalues of the deviation tensor are strictly negative everywhere; otherwise, they are Jacobi-unstable. Next, according to the definition of the Jacobi stability for a geodesic associated with a Euclidean, Riemannian, or Finslerian metric [
19], there can be a rigorous definition for the Jacobi stability of a trajectory
of the dynamical system corresponding to (
5) [
20,
21,
22]:
Definition 1. A trajectory of (5) is called Jacobi-stable if for any , there exists , such that for all and for all trajectories , with and . According with [
19,
20,
21,
22], we consider the trajectories of system (
5) as curves in a Euclidean space
, where the norm
is the norm induced by the canonical inner product
on
. Moreover, we will suppose that the deviation vector
from (
13) verifies the initial conditions
and
, where
O is the null vector from
. Additionally, if we assume that
and
, then for
, the trajectories of system (
5) merge together if and only if the real parts of all eigenvalues of
are strictly negative, or the trajectories of system (
5) disperse if and only if at least one of the real parts of the eigenvalues of
is strictly positive.
The Jacobi’s type of stability is about focusing the tendency on a neighborhood that is small enough, such as
of the trajectories of system (
5), in relation to the variation of the trajectories in (
11) that satisfy the conditions
and
.
We can point out that the system of second-order differential equations (SODE) (
5) is Jacobi-stable if and only if the system in variations (
12) is stable in the Lyapunov sense or is linear-stable. Consequently, the study of Jacobi stability is based on the study of the Lyapunov stability of all trajectories in a region, but without taking velocity into account. Therefore, even when there is reduction at an equilibrium point, this theory offers us information about the behavior of the trajectories in an open region around this equilibrium point.
4. SODE Formulation of the Rosenzweig–MacArthur Predator–Prey System
We consider the Rosenzweig–MacArthur predator–prey system (
4). By taking the derivative with respect to time
t in both equations of this system, we obtain the following equation:
If we change the notations of variables as follows:
then this system of second-order differential equations (SODEs) becomes
or, equivalently,
where
,
.
This system can be written similarly to SODEs from the KCC theory:
where
,
, and
The zero-connection curvature
has the following coefficients:
Since
, the nonlinear connection
N is given by the following coefficients:
Then, all the resulting coefficients of the Berwald connection are null.
The first invariant of the KCC theory
has the following components:
Let us remark that for , which means that for , or equivalently, that the functions are 1-homogeneous with respect to .
Next, taking (
14) into account, we obtain the components of the second invariant of the KCC theory, which means that the deviation curvature tensor of the Rosenzweig–MacArthur system (
4) is as follows:
Then, the trace and the determinant of the following deviation curvature matrix:
are trace
and det
.
Therefore, following the results from the previous section, we have:
Theorem 5. All the roots of the characteristic polynomial of P are negative or have negative real parts (i.e., Jacobi stability) if and only if Taking into account that , , , we obtained the third, fourth, and fifth invariants of the Rosenzweig–MacArthur predator–prey system as follows:
Theorem 6. The third KCC invariant , called the torsion tensor, has all eight components null, i.e., The fourth KCC invariant , called the Riemann–Christoffel curvature tensor, has all sixteen components null, i.e., The fifth KCC invariant , called the Douglas tensor, has all sixteen components null, which means that 5. Jacobi Stability Analysis of the Rosenzweig–MacArthur Predator–Prey System
In this section, we will determine the first two invariants at the equilibrium points of the Rosenzweig–MacArthur predator–prey system (
4), and we will analyze the Jacobi stability of the system near each equilibrium point.
Furthermore, for equilibrium points
,
, and
of the initial the Rosenzweig–MacArthur system (
4), we have the corresponding equilibrium points
,
, and
for SODE (
20).
For
, the first invariant of the KCC theory
has the components
, and the matrix with the components of the second KCC invariant is as follows:
Since and , using Theorem 5, we obtain the following:
Theorem 7. The trivial equilibrium point is always Jacobi-unstable.
For
the first invariant of the KCC theory
has the components
,
, and the matrix with the components of the second KCC invariant is as follows:
Since and , using Theorem 5, we obtain the following:
Theorem 8. The equilibrium point is always Jacobi-unstable.
If
and
, then the third equilibrium
exists and the first invariant of the KCC theory
at
has all components null
. For the second invariant (i.e., the curvature deviation tensor), we obtain the following components
at
:
Taking into account that
, where
and
, we obtain the following result:
Theorem 9. The equilibrium point is Jacobi-stable if and only if , or equivalently,where . Taking into account that and then or , the next result follows:
Theorem 10. If the third equilibrium exists and it is Jacobi-stable, then is a stable focus or unstable focus ().
Nevertheless, the converse is not always true. It is possible to have , but E can be positive because . However, if , then and also because .
Remark 1. Whenever exists and is Jacobi-stable, chaotic behavior in a small enough neighborhood of this point is not possible.
5.1. Dynamics of the Deviation Vector for the Rosenzweig–MacArthur Predator–Prey System
The behavior of the deviation vector
,
, giving the trajectory behavior of the dynamical system near an equilibrium point is described by the deviation equation (or Jacobi equation) (
12), or in a covariant form such as Equation (
13).
For the Rosenzweig–MacArthur predator–prey system, the deviation equations become the following:
The length of the deviation vector
is given by
Next, we will write the deviation equations near the equilibrium points of the Rosenzweig–MacArthur system. Then, the dynamics of the deviation vector near the equilibrium point
is described by the following SODEs:
The dynamics of the deviation vector near
is described by the the deviation equation:
Finally, if
, then the deviation equation which describes the dynamics of the deviation vector
near the equilibrium point
is as follows:
According to the standard approach used in differential geometry of plane curves [
23], the curvature
of the integral curve
corresponding to deviation Equation (
29) represents a quantitative description of the behavior of the deviation vector and is given by the following:
where
,
,
.
5.2. Comparison between Lyapunov Stability and Jacobi Stability for Two-Dimensional Systems
Following (
14) and according to [
15,
22,
38], the matrix of the curvature deviation tensor
at the equilibrium point
has the following expression:
where
A is the Jacobian matrix at
, and
is the equilibrium point of the initial first-order system from which the system of the second-order differential Equation (
5) will be obtained.
If , are the eigenvalues of A, then , are the eigenvalues of .
Since
,
are the roots of the following characteristic equation:
then we have
, where
.
Therefore, the equilibrium point
is Jacobi-stable if and only if the real parts of the eigenvalues of
P are negative, i.e.,
because
.
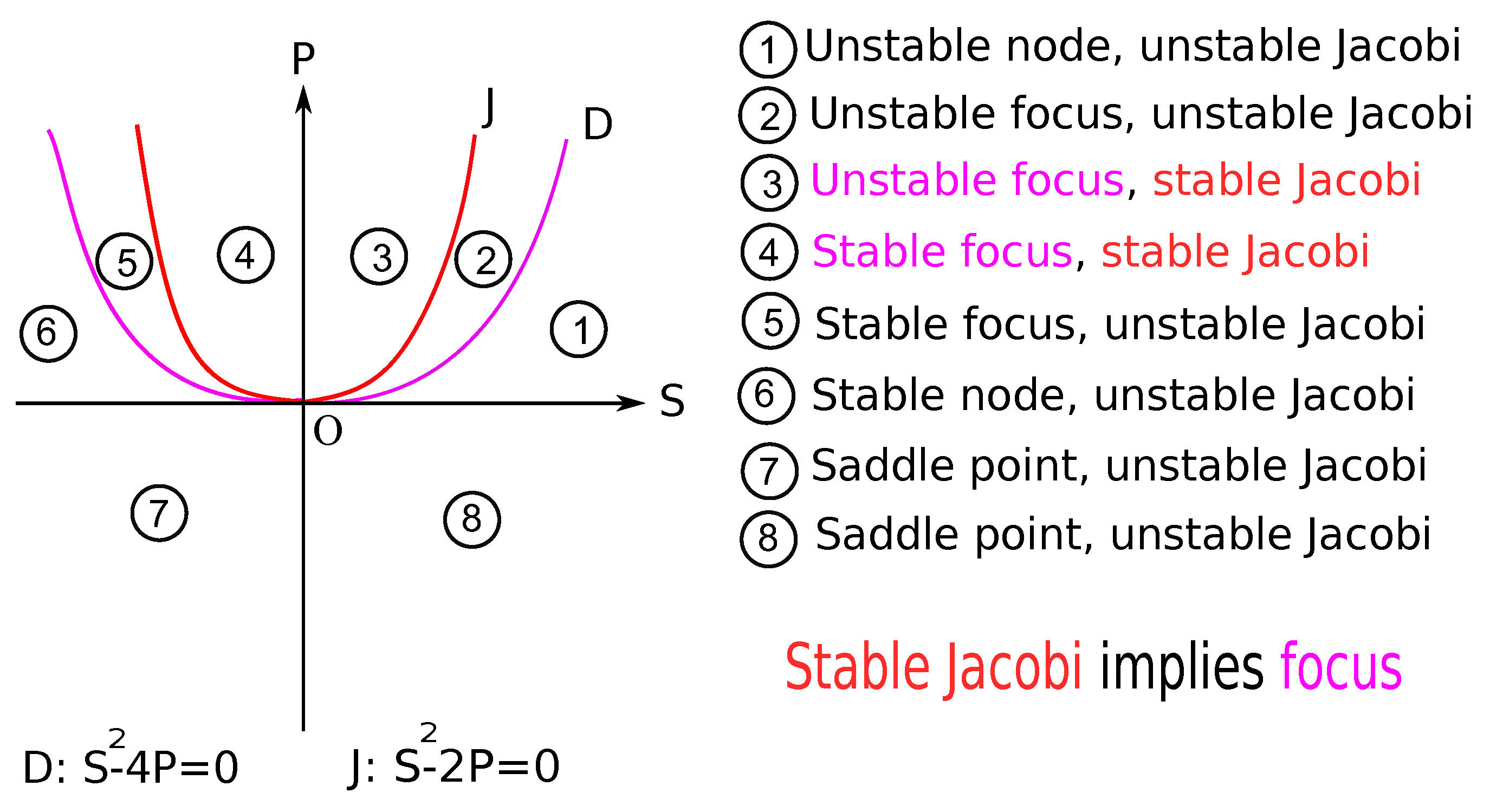
Therefore, the equilibrium point E is Jacobi-stable if and only if and .
In order to more clearly represent the relationship between linear (or Lyapunov) stability and Jacobi stability for two-dimensional systems, we will consider the following diagram with respect to
and
(see
Figure 1):
In particular, for the Rosenzweig–MacArthur predator–prey system (
4), we have
Then, we obtain the following result:
Theorem 11. If the equilibrium point exists, then it is Jacobi-stable if and only if and , where and .
Because , the parameter , which represents the death rate of the predator, plays an unexpectedly crucial role in the Jacobi stability of this system.
6. Examples and Discussion
Let the Rosenzweig–MacArthur predator–prey system (
4) be expressed as follows:
where
b,
c,
and
.
In order to illustrate the local dynamics of the predator–prey system, we will provide some concrete values for the three parameters of the system:
b,
c, and
. These particular systems will give us the confirmation of the previously obtained theoretical results, and they will also reveal to us that we cannot infirm or confirm Conjecture 2 from [
12] by this approach.
From the point of view of Jacobi stability, only the equilibrium point can satisfy this property. More precisely, is Jacobi-stable if and only if and , where .
Example 1. If , , , then we have the equilibrium point with the coordinates , and , , . Then, is Jacobi-stable with and , such as in Conjecture 2 from [12]. Example 2. For , , , we have , with , , . Then, is Jacobi-stable with and .
Example 3. For , , , we have , with , , . Then, is Jacobi-unstable with , , , and .
Example 4. For , , , we have , with , , . Then, is Jacobi-stable with and , such as in Conjecture 2 from [12]. Example 5. For , , , we have , with , , and . Then, is Jacobi-unstable with , , but , as in Proposition 1 from [12]. Example 6. For , , , we have , with , , and . Then, is Jacobi-stable with , , but , such as in Conjecture 2 from [12]. Example 7. For , , , we have , with , , and . Then, is Jacobi-unstable with , , and .
Example 8. For , , , we have with the coordinates , and , , . Then, is Jacobi-unstable with , , and .
Example 9. For , , , we have , and , , . Then, is Jacobi-stable with and .
Example 10. If , , , then , , and . We only have the saddle point and the saddle node.
Example 11. If , , , then , , and is a virtual equilibrium. We have the saddle point and the stable node.
Therefore, if the equilibrium point
exists, then it may or may not be Jacobi-stable, whether the hypothesis of Conjecture 2 from [
12] is fulfilled or not.




{kind=link}