Abstract
This paper is devoted to introducing a new viscosity approximation method using the implicit midpoint rules for finding a common element in the set of solutions of a generalized mixed equilibrium problem, the set of solutions of a general system of variational inequalities and the set of common fixed points of a finite family of nonexpansive mappings in a symmetric Hilbert space. Then, we prove a strong convergence theorem regarding the proposed iterative scheme under some suitable conditions on the parameters. Finally, we provide two numerical results to show the consistency and accuracy of the scheme. One of them, moreover, compares the behavior of our scheme with the iterative scheme of Ke and Ma (Fixed Point Theory Appl 190, 2015).
Keywords:
generalized mixed equilibrium problem; iterative method; fixed point; general system of variational inequality MSC:
47H10; 47J25; 47H09; 65J15
1. Introduction
Let H be a real symmetric Hilbert space equipped with the inner product and norm , and let C be a nonempty closed convex subset of H. A mapping T of C into itself is called nonexpansive if for all . We use to denote the set of fixed points T, i.e., . Additionally, is a contraction if for all and some constant . In this case, f is said to be a -contraction.
In 2008, Peng and Yao [1] considered the following generalized mixed equilibrium problem, which involves finding such that
where is a nonlinear mapping, is a function and is a bifunction of C. The solution set of (1) is denoted by .
If , then problem (1) reduces to the following equilibrium problem (EP), which aims to find a point satisfying the following property:
We use to denote the set of solutions of EP (2), that is, . The EP (2) includes, as special cases, numerous problems in physics, optimization and economics. Some authors (e.g., [2,3,4,5,6,7,8,9,10,11,12,13,14,15]) have proposed some useful methods for solving the EP (2). Set for all , where is a nonlinear mapping. Then, if and only if
that is, is a solution of the variational inequality. The (3) is well known as the classical variational inequality. The set of solutions of (3) is denoted by .
Let A be a bounded operator on C. A is -strongly; that is, there exists a constant such that for all .
In 1967, Halpern [16] considered the following explicit iterative process:
where u is a given point and is nonexpansive. He proved the strong convergence of to a fixed point of T provided that with . In 2003, Xu [17] introduced the following iterative process:
where is a sequence in . He proved that the above sequence converges strongly to the unique solution of the minimization problem with : , where A is a strongly positive bounded linear operator on H.
In 2006, Marino and Xu [18] considered the following viscosity iterative method:
where f is a contraction on H. They proved the above sequence converges strongly to the unique solution of the variational inequality
In 2001, Yamada et al. [19] considered the following hybrid steepest-descent iterative method:
where F is -Lipschitzian continuous and -strongly monotone operator with , and . Under some suitable conditions, the above sequence converges strongly to the unique solution of the variational inequality
In 2010, Tian [20] considered the following general viscosity type iterative method:
Under certain approximate conditions, the above sequence converges strongly to a fixed point of T, which solves the variational inequality
In 2014, Zhang and Yang [21] proposed an explicit iterative algorithm based on the viscosity method for finding a solution for a class of variational inequalities over the common fixed points set of the finite family of nonexpansive mappings , as follows:
where for , V is -Lipschitzian and is a real sequence in . They proved that converges strongly to the unique solution of the variational inequality:
In 2016, Jeong [22] introduced a new iterative method based on the hybrid viscosity approximation method and the hybrid steepest-descent method, as follows:
He proved that the sequence converges strongly to the unique solution of the variational inequality:
On the other hand, in 2008, Ceng et al. [23] considered the following problem of finding satisfying
which is called a general system of variational inequalities, where are two nonlinear mappings, and and are two fixed constants. Precisely, they introduced the following iterative algorithm:
where , and are real sequences, S is a nonexpansive mapping on C, and is the metric projection of H onto C and the strong convergence theorem obtained.
The implicit midpoint rules for solving fixed point problems of nonexpansive mappings are a powerful numerical method for solving ordinary differential equations; see [24,25,26] and the references therein. Therefore, many authors have studied them; see [27,28,29,30,31]. In 2015, Xu et al. [31] applied the viscosity technique to the implicit midpoint rule for nonexpansive mappings and proposed the following viscosity implicit midpoint rule:
where is a real sequence. They proved that the sequence converges strongly to a fixed point of T, which is the unique solution of a certain variational inequality. Additionally, Ke and Ma [29] studied the following generalized viscosity implicit rules:
where and are real sequences. They showed that the sequence converges strongly to a fixed point of T, which is the unique solution of a certain variational inequality.
Recently, Cai et al. [32] introduced the following modified viscosity implicit rules:
where F is a Lipschitzian and strongly monotone map, , and are real sequences and is the metric projection of H onto C. Under some suitable assumptions imposed on the parameters, they obtained some strong convergence theorems.
Motivated by the above results, we proposed a new composite iterative scheme for finding a common element of the set of solutions of a general system of variational inequalities, a generalized mixed equilibrium problem and the set of common fixed points of a finite family of nonexpansive mappings in Hilbert spaces. Then, we proved a strong convergence theorem. Finally, we provided two numerical examples for supporting our main result.
2. Preliminaries
Let H be a real Hilbert space. We use ⇀ and → to denote the weak and strong convergences in H, respectively. The following identity holds:
for all and such that . Let C be a nonempty closed convex subset of H. Then, for any , there exists a unique nearest point in C, denoted by , such that
is called the metric projection of H onto C. It is known that is nonexpansive and satisfies
Furthermore, for and , we have
Lemma 1.
Let H be a real Hilbert space. Then, for all ,
.
Definition 2
([32]). A mapping is called firmly nonexpansive if for any
Definition 3
([32]). A mapping is called α-strongly monotone if for any
Definition 4
([33]). A mapping is said to be an averaged mapping if it can be written as the average of the identity I and a nonexpansive mapping; that is, where and is nonexpansive. More precisely, we say that T is averaged.
Clearly, a firmly nonexpansive mapping is a averaged map.
Proposition 5
([34]). The composite of finitely many averaged mapping is averaged. That is, if each of the mappings is averaged, then so is the composite . In particular, if is averaged, and is averaged, where , then the composite is averaged, where .
If the mappings are averaged and have a common fixed point, then . In particular, if , we have .
Lemma 6
([35]). Let C be a nonempty closed convex subset of H and be a bifunction satisfying the following conditions:
- ()
- for all ;
- ()
- Θ is monotone, i.e., for all ;
- ()
- For each is weakly upper semicontinuous;
- ()
- For each is convex and lower semicontinuous.
Suppose that is convex and lower semicontinuous satisfying the following conditions:
- ()
- For each and , there exist a bounded subset and such that for any ,
- ()
- C is bounded set.
For and , define a mapping as follows:
for all . Then, the following hold:
- (i)
- for each and is single-valued;
- (ii)
- is firmly nonexpansive;
- (iii)
- ;
- (iv)
- Ω is closed and convex.
Lemma 7
([36]). Let C, H, Θ and be as in Lemma 6. Then, the following inequality holds:
for all and .
Definition 8
([32]). A nonlinear operator A in which the domain is and the range is is said to be inverse strongly monotone (for short, ism ) if there exists such that
Lemma 9
([37]). Let C be a closed convex subset of H and be a nonexpansive mapping with . If is a sequence in C such that and , then .
Lemma 10
([38]). Let be an L-Lipschitzian and η-strongly monotone mapping. Let and . Define
where is a nonexpansive mapping. Then, the mapping is a contraction from H into H, that is,
where .
Lemma 11
([39]). Assume that is a sequence of nonnegative real numbers such that
where is a sequence in , a sequence of nonnegative real numbers and a sequence in such that and Then, .
Lemma 12
([23]). For a given is a solution of problem (4) if and only if is a fixed point of the mapping defined by
where .
Lemma 13
([30]). Let and be bounded sequences in Banach space X and be a sequence in with . Suppose that for all integer and . Then, .
3. Main Result
Theorem 14.
Let C be a closed convex subset of H; be a bifunction satisfying the conditions of Lemma 6; be a lower semicontinuous and convex function with restriction or of Lemma 6; be α-ism, β-ism and ω-ism, respectively; be an infinite family of nonexpansive self-mappings on H; be an L-Lipschitzian and ν-strongly monotone mapping; and be a κ-Lipschitzian mapping. Let and , where . Set and assume . Suppose that , , and are real sequences satisfying the following conditions:
- ()
- , , and ;
- ()
- and ;
- ()
- and ;
- ()
- for some and .
Given , let be a sequence generated by
where for and for some , and . Suppose for . Then, the sequence converges strongly to , where , which solves the variational inequality (VI):
To prove Theorem 14, we first establish some lemmas.
Lemma 15.
Let be an L-Lipschitzian and ν-strongly monotone mapping with . Then, is nonexpansive.
Proof.
For , we have
□
Lemma 16.
Let be an α-ism and . Then, is nonexpansive.
Proof.
For , we have
□
Proof of Theorem 14.
We break the proof into several steps.
Step 1. The sequences and are bounded. Suppose and . Therefore, from (7), we obtain
since A is ism, , and , we derive from (7) and Lemma 16 that
Then, from (11), we have
In a similar way, we have
By using (7), and conditions () and (), we may assume, without loss of generality, . Then, from (7), (9) and Lemma 10, we have
By induction, we have
for all . Hence, is bounded, which implies that , , , , and are all bounded.
Step 2. The sequence is asymptotically regular, that is, . To see this, we set to derive that
It follows that
Note that
and
Since for and , are bounded, we have
Similarly, we obtain
Hence,
Observe that by Lemma 16, we have
Therefore,
Therefore, from (7), we have
which implies that
where is a big enough constant. Additionally, from Lemma 7, we have
Hence, by Lemma 13, we have Therefore,
Step 3. We prove
- (3a)
- ,
- (3b)
- ,
- (3c)
- .
From (7), we have
This implies that
Therefore, from (24), we obtain
Therefore,
From (24), we have
Therefore,
Thus,
Therefore, by Lemma 16, we have
Therefore, from Lemmas 1 and 10, we obtain
Hence,
Hence,
Thus, from (31), we have
Therefore,
Step 4. We have the following variational inequality:
where is the unique fixed point of the contraction ; namely, . Alternatively, is the unique solution of the variational inequality
To prove (34), take a subsequence of weakly convergent to a point and such that
By virtue of VI (35), it suffices to show that . To see , we use and the demiclosedness principle of nonexpansive mappings then ensures that . Since is bounded for , we can assume that as , where for . Define for . Therefore, for . Note that
Hence,
for , where E is an arbitrary bounded subset of H. Since and is averaged for , by Lemma 5, we have . From
where is a bounded subset including and is a bounded subset including . By (33) and (36), we obtain . Therefore, from Lemma 9, we have . Hence, . Next, we show . Since , it follows from the definition of and the monotonicity of that
From (), it follows that
Replacing n by , we have
Now, set with . Then, from (37), we have
From (3b), we have . Moreover, by the monotonicity of A, the lower semi-continuous of , and , we obtain
as . From (), (), the convexity of and (38), we have
Thus,
Letting , we have
Hence, . Then, remains to be solved. we know
From Lemma 9, we have . Therefore, and the proof of Step 4 is complete.
We can rewrite the last relation as
where and
It is now immediately clear that and . This enables us to apply Lemma 11 to the relation (39) to arrive at , that is, in the norm. □
Corollary 17.
Let all the assumptions of Theorem 14 hold except for all , , and , and (instead of ). Then, the sequence defined by
where the initial guess is arbitrary and converges strongly to , where , which solves the variational inequality (8).
Corollary 18.
Let all the assumptions of Theorem 14 hold except for all and , for all and (instead of ). Then, the sequence is defined by
where the initial guess is arbitrary and converges strongly to , where , which solves the variational inequality (8).
4. Numerical Test
In this section, first, we give a numerical example that satisfies all assumptions in Theorem 14 in order to illustrate the convergence of the sequence generated by the iterative process defined by (7). Next, we give another numerical example for (7) to compare its behavior with the iterative method (5) of Ke and Ma [29].
Example 19.
Let , and define , and . Then, A is -ism, and from Lemma 6, is single-valued for all . Now, we deduce a formula for . For any and , we have
Set . Then, is a quadratic function of y with coefficients and . Therefore, its discriminate is
Since for all , this is true if and only if . That is, . Therefore, , which yields . Therefore, from Lemma 6, we have . Let , , , and for . Suppose , , and . Hence, B is ism, D is ism, F is -Lipschitzian and ism, and V is -Lipschitzian. Let , , and . Hence, . Then, from Theorem 14, the sequence , generated iteratively by
converges strongly to , where .
Now, we compare the effectiveness of our algorithm with the algorithm (5) by a numerical example. In fact, Ke and Ma [29] proved the following strong convergence theorem.
Theorem 20.
Let C be a closed convex subset of H, T be a nonexpansive self-mappings on C with and f be a κ-contraction on C for some . Pick any ; let be a sequence generated by (5), where and are real sequences satisfying the following conditions:
- ()
- , , and ;
- ()
- .
Then, the sequence converges strongly to , which solves the variational inequality:
Example 21.
Therefore, the sequence converges strongly to 0 by Theorem 14. Now, let the sequence be generated by (5). Then, the scheme (5) can be simplified as
Therefore, the sequence converges strongly to 0 by Theorem 20.
According to the Table 1 and the Figure 1, we see that, although the initial points are different ( and ), in both cases, the sequence defined by (40) converges to 0 where and .

Table 1.
The values of the sequence for Algorithm (40).
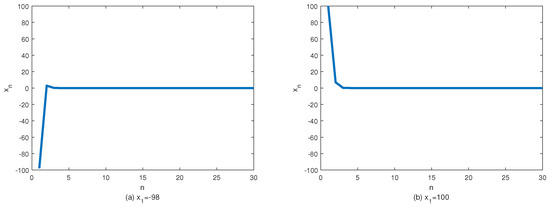
Figure 1.
The convergence of with different initial values .
Table 2 and Figure 2 indicate that the sequence generated by (41) and (42) converges to 0 where and . The efficiency of algorithm (42) in comparison with Algorithm (41) clearly appeared in this figure.
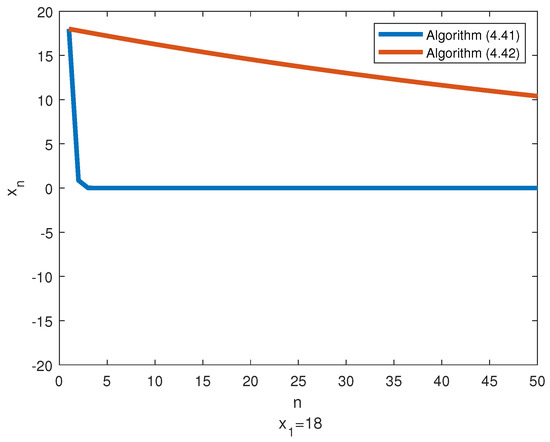
Remark 22.
Table 2 and Figure 2 show that the convergent rate of iterative algorithm (7) is faster than that of the iterative algorithm (5) of Ke and Ma. In fact, regarding to Table 2 and Figure 2, we consider that Algorithm (41) approaches 0 from the third term onwards, but Algorithm (42) does not approach 0 even until the fiftieth term.
5. Conclusions
We introduce a new composite iterative algorithm for finding a common element of the set of solutions of a general system of variational inequalities, a generalized mixed equilibrium problem and the set of common fixed points of a finite family of nonexpansive mappings in Hilbert spaces. Then, we prove that the sequence generated by the algorithm converges strongly to a common element of solution sets for these problems. Moreover, we deduce some consequences from our main result. Eventually, we provide a numerical example to illustrate the justification of the main result and another one to compare our algorithm with Algorithm (5), which shows that the convergent rate of our iterative algorithm is faster than that of the iterative algorithm (5) of Ke and Ma.
Author Contributions
Conceptualization, M.Y. and S.H.S.; methodology, M.Y.; software, M.Y.; validation, S.H.S.; formal analysis, M.Y.; investigation, M.Y.; resources, S.H.S.; data curation, S.H.S.; writing—original draft preparation, M.Y.; writing—review and editing, S.H.S.; visualization, M.Y.; project administration, S.H.S.; funding acquisition, M.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors thank the referees for their valuable and useful comments. A part of this research was carried out while the second author was visiting the University of Alberta.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Peng, J.W.; Yao, J.C. A new hybrid-extragradient method for generalized mixed equilibrium problems, fixed point problems and variational inequality problems. Taiwan. J. Math. 2008, 12, 1401–1432. [Google Scholar] [CrossRef]
- Anh, P.N.; An, L.T.H.; Tao, P.D. Yosida approximation methods for generalized equilibrium problems, J. Convex Anal. 2020, 27, 959–977. [Google Scholar]
- Dadashi, V.; Postolache, M. Hybrid Proximal Point Algorithm and Applications to Equilibrium Problems and Convex Programming. J. Optim. Theory Appl. 2017, 174, 518–529. [Google Scholar] [CrossRef]
- Jolaoso, L.O.; Alakoya, T.O.; Taiwo, A.; Mewomo, O.T. Inertial extragradient method via viscosity approximation approach for solving equilibrium problem in Hilbert space. Optimization 2020, 70, 387–412. [Google Scholar] [CrossRef]
- Muu, L.D.; Le, X.T. On fixed point approach to equilibrium problem. J. Fixed Point Theory Appl. 2021, 23, 50. [Google Scholar] [CrossRef]
- Razani, A.; Yazdi, M. Viscosity approximation method for equilibrium and fixed point problems. Fixed Point Theory 2013, 14, 455–472. [Google Scholar]
- Razani, A.; Yazdi, M. A New Iterative Method for Generalized Equilibrium and Fixed Point Problems of Nonexpansive Mappings. Bull. Malays. Math. Sci. Soc. 2012, 35, 1049–1061. [Google Scholar]
- Vinh, N.T. A new projection algorithm for solving constrained equilibrium problems in Hilbert spaces. Optimization 2019, 68, 1447–1470. [Google Scholar] [CrossRef]
- Van Quy, N. An algorithm for a class of bilevel split equilibrium problems: Application to a differentiated Nash-Cournot model with environmental constraints. Optimization 2019, 68, 753–771. [Google Scholar] [CrossRef]
- Van Hunga, N.; O’Regan, D. Bilevel equilibrium problems with lower and upper bounds inlocally convex Hausdorff topological vector spaces. Topol. Appl. 2020, 269, 106939. [Google Scholar] [CrossRef]
- Wang, S.; Hu, C.; Chia, G. Strong convergence of a new composite iterative method for equilibrium problems and fixed point problems. Appl. Math. Comput. 2010, 215, 3891–3898. [Google Scholar] [CrossRef]
- Yao, Y.; Postolache, M.; Yao, C. An iterative algorithm for solving the generalized variational inequalities and fixed points problems. Mathematics. 2019, 7, 61. [Google Scholar] [CrossRef]
- Yazdi, M. New iterative methods for equilibrium and constrained convex minimization problems. Asian-Eur. J. Math. 2019, 12, 1950042. [Google Scholar] [CrossRef]
- Yazdi, M.; Hashemi Sababe, S. A new extragradient method for equilibrium, split feasibility and fixed point problems. J. Nonlinear Convex Anal. 2021, 22, 759–773. [Google Scholar]
- Yazdi, M.; Hashemi Sababe, S. Strong convergence theorem for a general system of variational inequalities, equilibrium problems, and fixed point problems. Fixed Point Theory 2022, 23, 763–778. [Google Scholar]
- Halpern, B. Fixed points of nonexpanding maps. Bull. Am. Math. Soc. 1967, 73, 957–961. [Google Scholar] [CrossRef]
- Xu, H.K. An iterative approach to quadratic optimization. J. Optim. Theory Appl. 2003, 116, 659–678. [Google Scholar] [CrossRef]
- Marino, G.; Xu, H.K. A general iterative method for nonexpansive mappings in hilbert spaces. J. Math. Anal. Appl. 2006, 318, 43–52. [Google Scholar] [CrossRef]
- Yamada, I.; Butnariu, D.; Censor, Y.; Reich, S. The hybrid steepest descent method for the variational inequality problems over the intersection of fixed points sets of nonexpansive mappings. In Inherently Parallel Algorithms in Feasibility and Optimization and Their Application; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Tian, M. A general iterative algorithm for nonexpansive mappings in hilbert spaces. Nonlinear Anal. 2010, 73, 689–694. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, C. A new explicit iterative algorithm for solving a class of variational inequalities over the common fixed points set of a finite family of nonexpansive mappings. Fixed Point Theory Appl. 2014, 2014, 60. [Google Scholar] [CrossRef][Green Version]
- Jeong, J. Generalized viscosity approximation methods for mixed equilibrium problems and fixed point problems. Appl. Math. Comput. 2016, 283, 168–180. [Google Scholar] [CrossRef]
- Ceng, L.C.; Wang, C.; Yao, J.C. Strong convergence theorems by a relaxed extragradient method for a general system of variational inequalities. Math. Methods Oper. Res. 2008, 67, 375–390. [Google Scholar] [CrossRef]
- Schneider, C. Analysis of the linearly implicit mid-point rule for differential-algebra equations. Electron. Trans. Numer. Anal. 1993, 1, 1–10. [Google Scholar]
- Somalia, S. Implicit midpoint rule to the nonlinear degenerate boundary value problems. Int. J. Comput. Math. 2002, 79, 327–332. [Google Scholar] [CrossRef]
- Van Veldhuxzen, M. Asymptotic expansions of the global error for the implicit midpoint rule (stiff case). Computing 1984, 33, 185–192. [Google Scholar] [CrossRef]
- Bader, G.; Deuflhard, P. Asemi-implicit mid-point rule for stiff systems of ordinary differential equations. Numer. Math. 1983, 41, 373–398. [Google Scholar] [CrossRef]
- Deuflhard, P. Recent progress in extrapolation methods for ordinary differential equations. SIAM Rev. 1985, 27, 505–535. [Google Scholar] [CrossRef]
- Ke, Y.; Ma, C. The generalized viscosity implicit rules of nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2015, 2015, 190. [Google Scholar] [CrossRef]
- Suzuki, T. Strong convergence of Krasnoselskii and Mann’s type sequences for one-parameter nonexpansive semigroups without Bochner integrals. J. Math. Anal. Appl. 2005, 305, 227–239. [Google Scholar] [CrossRef]
- Xu, H.K.; Aoghamdi, M.A.; Shahzad, N. The viscosity technique for the implicit midpoint rule of nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl. 2015, 2015, 41. [Google Scholar] [CrossRef]
- Cai, G.; Shehu, Y.; Iyiolal, O.S. The modified viscosity implicit rules for variational inequality problems and fixed point problems of nonexpansive mappings in Hilbert spaces. RACSAM 2019, 113, 3545–3562. [Google Scholar] [CrossRef]
- Tian, M.; Liu, L. Iterative algorithms base on the viscosity approximation method for equilibrium and constrained convex minimization problem. Fixed Point Theory Appl. 2012, 201, 1–17. [Google Scholar]
- Byrne, C. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004, 20, 103–120. [Google Scholar] [CrossRef]
- Ceng, L.C.; Yao, J.C. A hybrid iterative scheme for mixed equilibrium problems and fixed point problems, J. Comput. Appl. Math. 2008, 214, 186–201. [Google Scholar] [CrossRef]
- Ceng, L.C.; Yao, J.C. A relaxed extragradient-like method for a generalized mixed equilibrium problem, a general system of generalized equilibria and a fixed point problem. Nonlinear Anal. 2010, 72, 1922–1937. [Google Scholar] [CrossRef]
- Geobel, K.; Kirk, W.A. Topics in Metric Fixed Point Theory; Cambridge Studies in Advanced Mathematics; Cambridge University Press: Cambridge, UK, 1990; Volume 28. [Google Scholar]
- Xu, H.K.; Kim, T.H. Convergence of hybrid steepest-descent methods for variational inequalities. J. Optim. Theory Appl. 2003, 119, 185–201. [Google Scholar] [CrossRef]
- Aoyama, K.; Kimura, Y.; Takahashi, W.; Toyoda, M. Approximation of common fixed points of a countable family of nonexpansive mappings in a Banach space. Nonlinear Anal. 2007, 67, 2350–2360. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).