
Symmetries, Reductions and Exact Solutions of a Class of (2k + 2)th-Order Difference Equations with Variable Coefficients


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Preliminaries
- is the identity map if when ;
- for every a and b sufficiently close to 0;
- Each can be represented as a Taylor series (in a neighborhood of that is determined by x), and therefore
2. Symmetries
3. Exact Solutions
- For k being odd:
- For k being even:
3.1. Case with -Periodic Sequences and
Case with
3.2. Case with One-Periodic Sequences and
3.2.1. Case with
3.2.2. Case with
4. Results
- If we set , and in Equations (42)–(44), we obtain the result (for the case ) in [6] for Equation (7) (see Theorem 2), and the restriction () in [6] coincides with our restrictions (, , and ). Additionally, the solution for the case (see Theorem 5 in [6]) corresponds to our solution with the same restrictions on the initial conditions;
- If we set , and (resp ) in Equations (48)–(50), we obtain the result in [7] for Equation (8) (see Theorem 1 (resp. Theorem 4)). However, the restriction ( and are nonzero positive real numbers (resp. , for )) in [7] is a special case of our restrictions ( (resp. , and )). On the other hand, if and , the results are the same as in [7] (see Theorems 6 and 9) with the same restrictions on the initial conditions ( and );
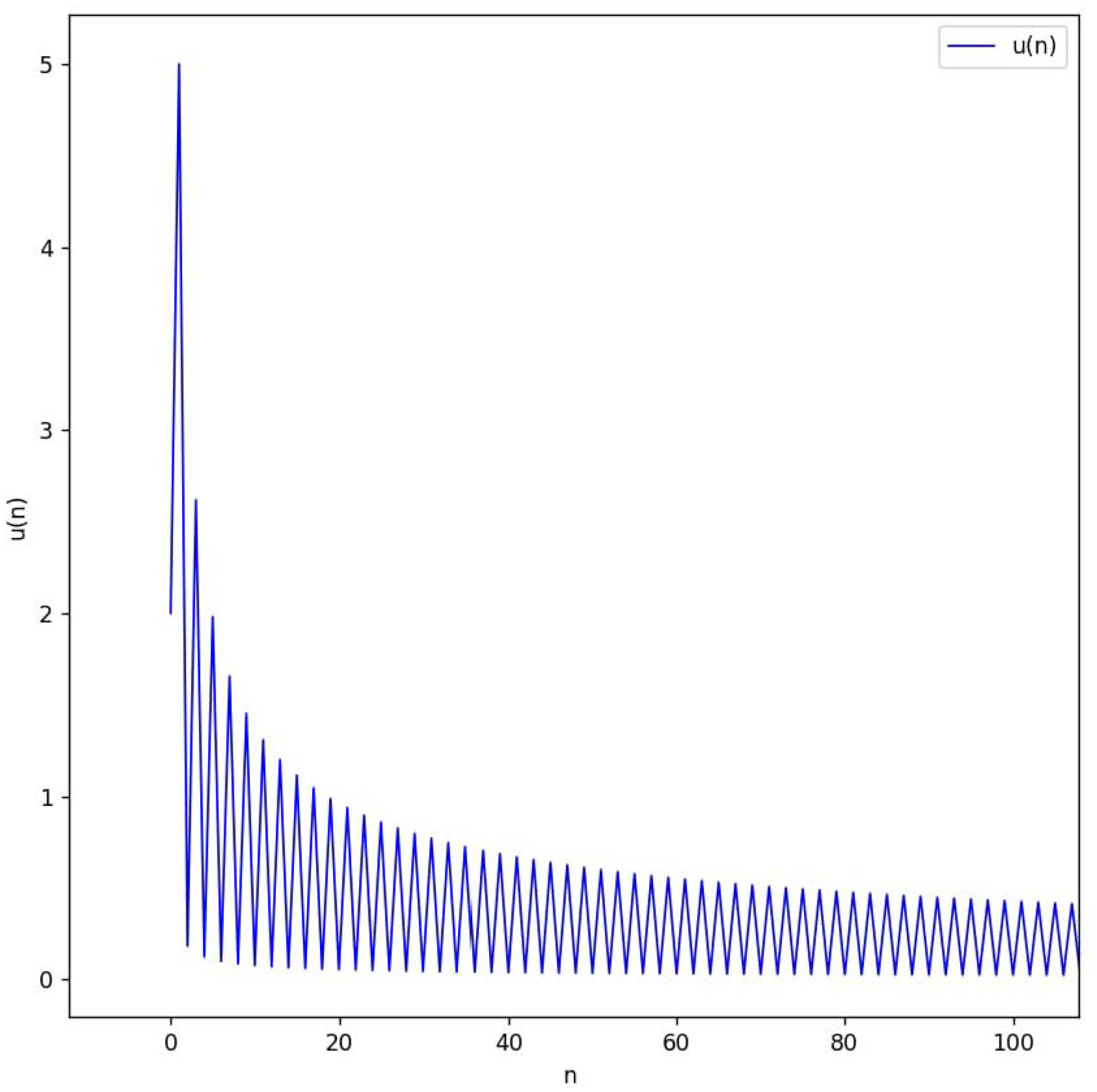
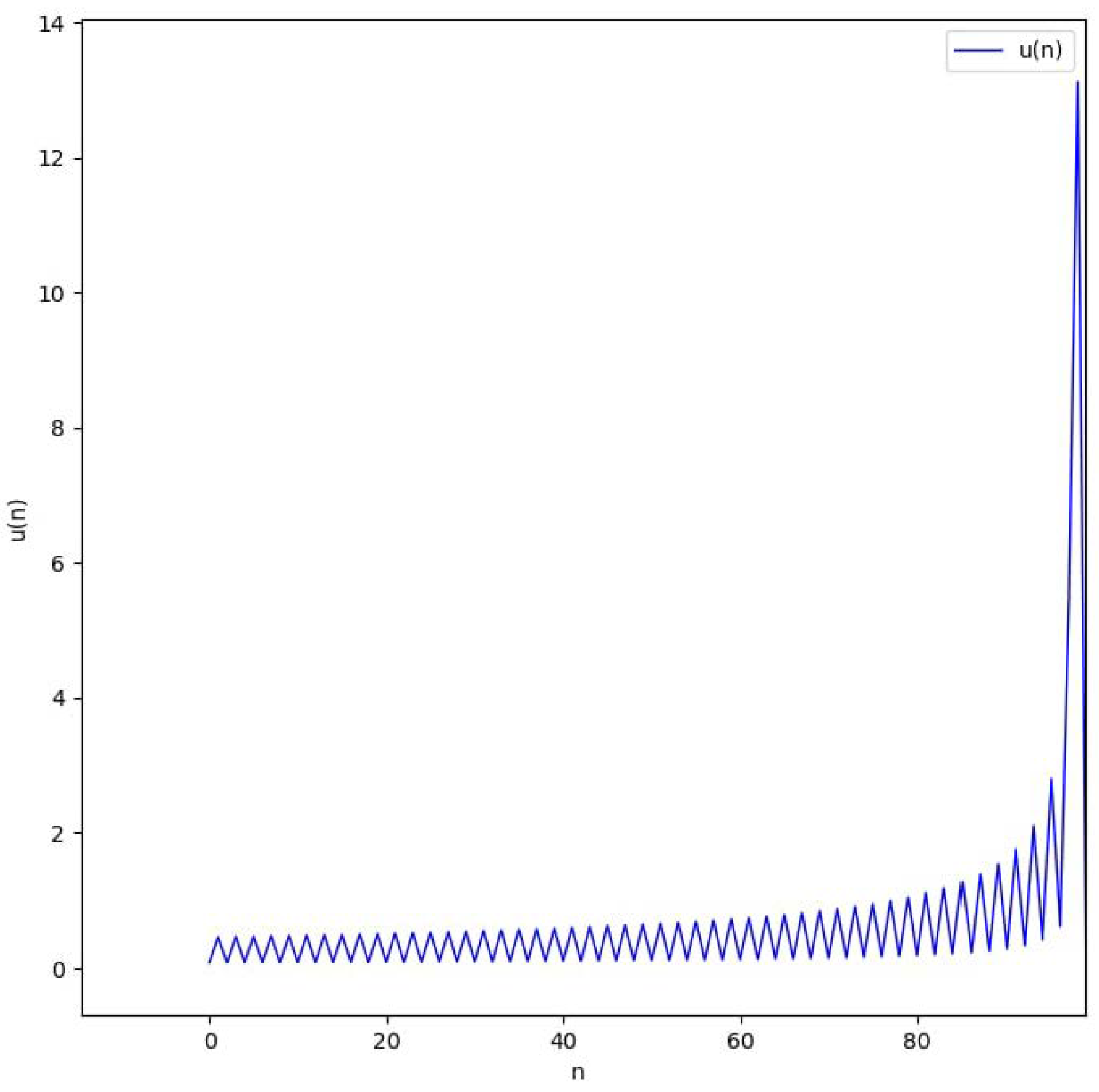
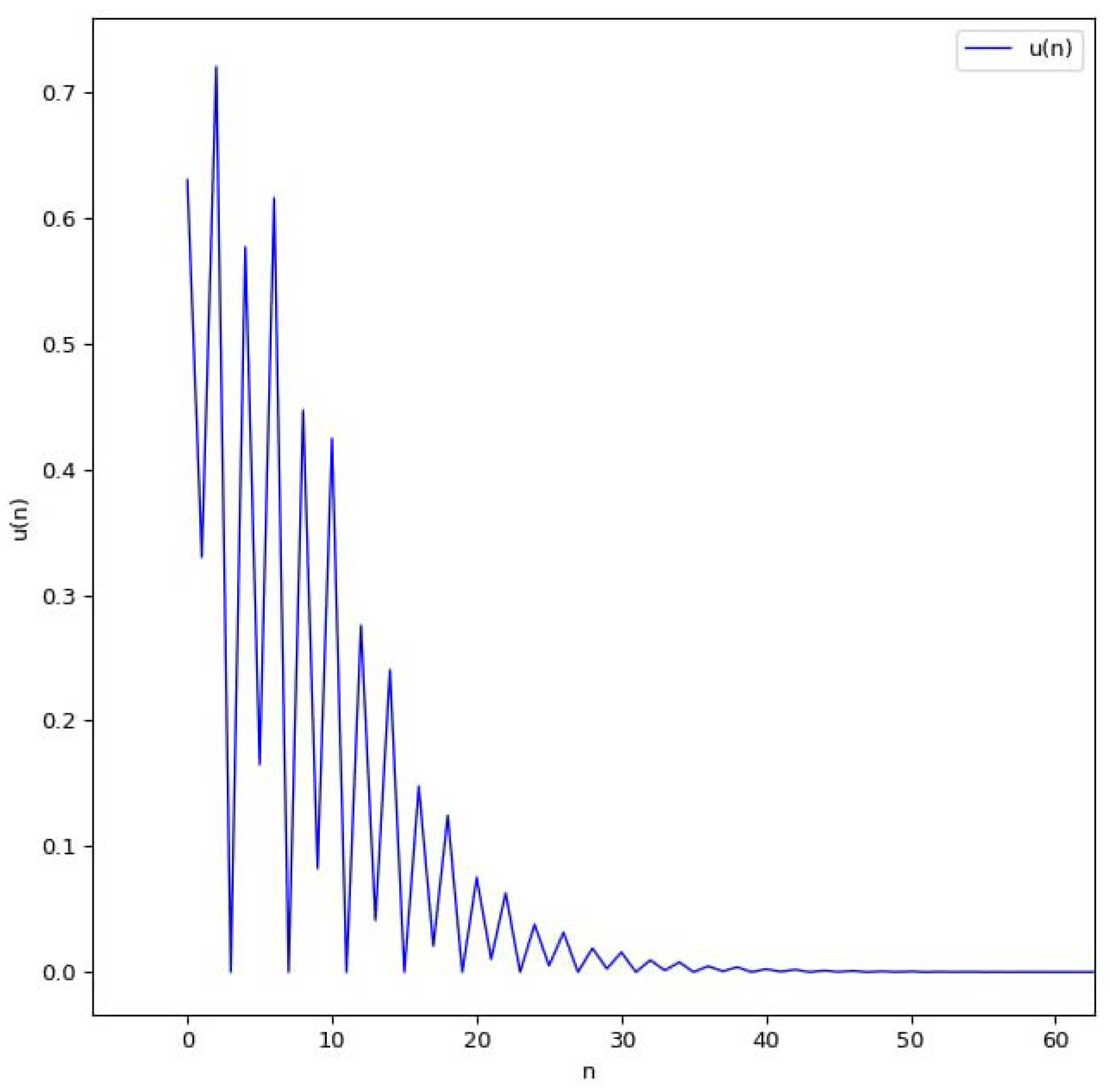
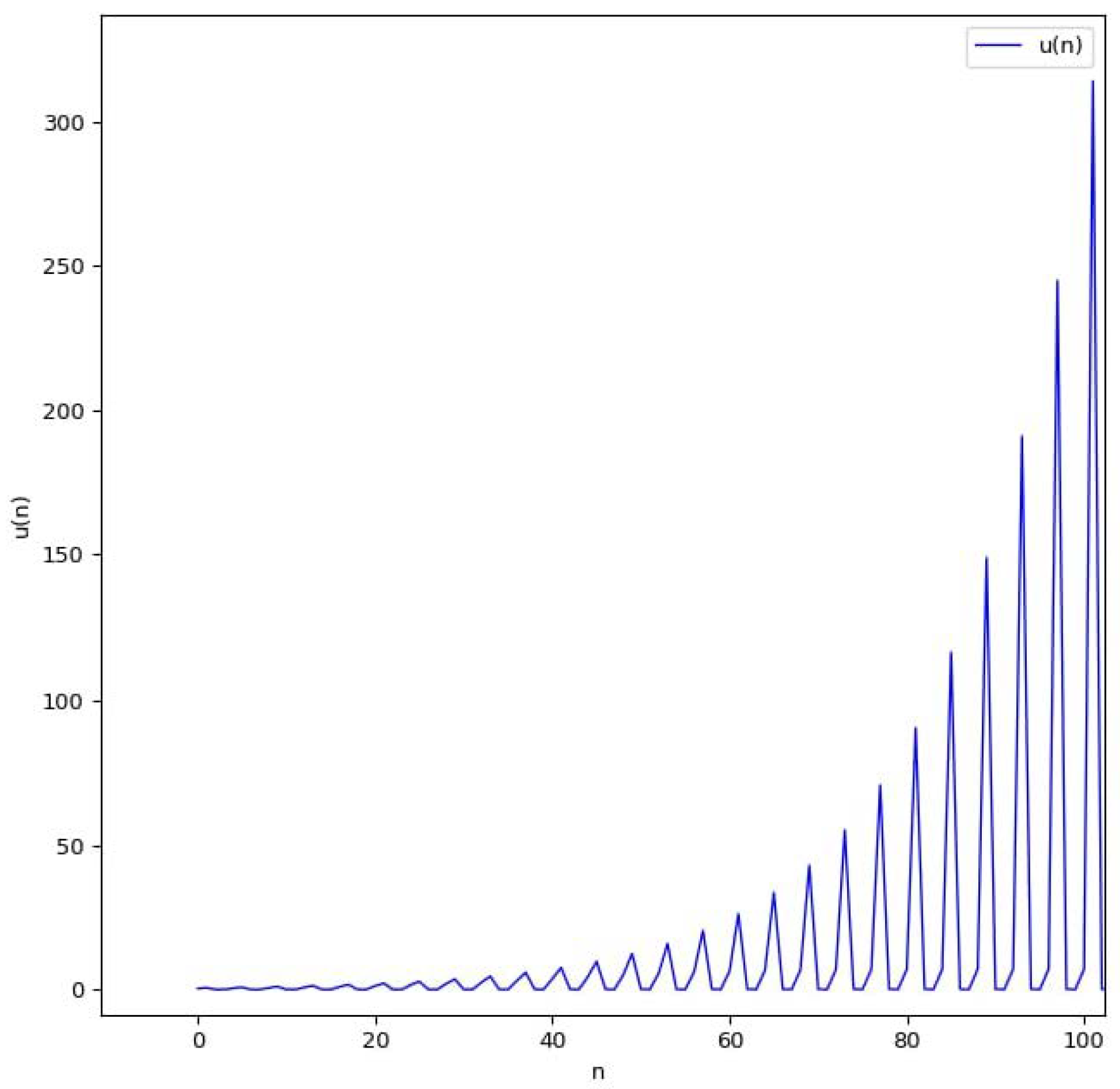
5. Numerical Examples
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cinar, C. On the positive solutions of the difference equation xn+1 = xn−1/(1 + xnxn−1). Appl. Math. Comput. 2004, 150, 21–24. [Google Scholar]
- Cinar, C. On the difference equation xn+1 = xn−1/(−1 + xnxn−1). Appl. Math. Comput. 2004, 158, 813–816. [Google Scholar]
- Cinar, C. On the positive solutions of the difference equation xn+1 = axn−1/(1 + bxnxn−1). Appl. Math. Comput. 2004, 156, 587–590. [Google Scholar]
- Cinar, C. On the solutions of the difference equation xn+1 = xn−1/(−1 + axnxn−1). Appl. Math. Comput. 2004, 158, 793–797. [Google Scholar]
- Cinar, C. On the positive solutions of the difference equation xn+1 = xn−1/(1 + axnxn−1). Appl. Math. Comput. 2004, 158, 809–812. [Google Scholar]
- Aloqeili, M. Dynamics of a rational difference equation. Appl. Math. Comput. 2006, 176, 768–774. [Google Scholar] [CrossRef]
- Elsayed, E.M. On the solution of some difference equation. Eur. J. Pure Appl. Math. 2011, 4, 287–303. [Google Scholar]
- Elsayed, E.M. On the difference equation. Int. J. Contemp. Math. Sci. 2008, 3, 1657–1664. [Google Scholar]
- Quispel, G.R.W.; Sahadevan, R. Lie symmetries and the integration of difference equations. Phys. Lett. A 1993, 184, 64–70. [Google Scholar] [CrossRef]
- Hydon, P.E. Difference Equations by Differential Equation Methods; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Levi, D.; Vinet, L.; Winternitz, P. Lie group formalism for difference equations. J. Phys. A Math. Gen. 1997, 30, 633–649. [Google Scholar] [CrossRef]
- Olver, P. Applications of Lie Groups to Differential Equations, 2nd ed.; Springer: New York, NY, USA, 1993. [Google Scholar]
- Folly-Gbetoula, M.; Kara, A.H. Symmetries, conservation laws, and integrability of difference equations. Adv. Differ. Eq. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Hydon, P.E. Symmetries and first integrals of ordinary difference equations. Proc. R. Soc. Lond. A 2000, 456, 2835–2855. [Google Scholar] [CrossRef]
- Folly-Gbetoula, M. Symmetry, reductions and exact solutions of the difference equation un+2 = aun/(1 + bunun+1). J. Diff. Eq. Appl. 2017, 23, 1017–1024. [Google Scholar] [CrossRef]
- Yalcinkaya, I. On the global attractivity of positive solutions of a rational difference equation. Selcuk J. Appl. Math. 2008, 9, 3–8. [Google Scholar]
- Karatas, R. On the solutions of the recursive sequence . Fasc. Math. 2010, 45, 37–45. [Google Scholar]
- Abdelrahman, M.A.E.; Chatzarakis, G.E.; Li, T.; Moaaz, O. On the difference equation xn+1 = axn−l + bxn−k + f(xn−l,xn−k). Adv. Differ. Eq. 2018, 431, 2018. [Google Scholar]
- Joshi, N.; Vassiliou, P. The existence of Lie Symmetries for First-Order Analytic Discrete Dynamical Systems. J. Math. Anal. Appl. 1995, 195, 872–887. [Google Scholar] [CrossRef][Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Folly-Gbetoula, M. Symmetries, Reductions and Exact Solutions of a Class of (2k + 2)th-Order Difference Equations with Variable Coefficients. Symmetry 2022, 14, 1290. https://doi.org/10.3390/sym14071290
Folly-Gbetoula M. Symmetries, Reductions and Exact Solutions of a Class of (2k + 2)th-Order Difference Equations with Variable Coefficients. Symmetry. 2022; 14(7):1290. https://doi.org/10.3390/sym14071290
Chicago/Turabian StyleFolly-Gbetoula, Mensah. 2022. "Symmetries, Reductions and Exact Solutions of a Class of (2k + 2)th-Order Difference Equations with Variable Coefficients" Symmetry 14, no. 7: 1290. https://doi.org/10.3390/sym14071290
APA StyleFolly-Gbetoula, M. (2022). Symmetries, Reductions and Exact Solutions of a Class of (2k + 2)th-Order Difference Equations with Variable Coefficients. Symmetry, 14(7), 1290. https://doi.org/10.3390/sym14071290