
Symplectic Dynamics and Simultaneous Resonance Analysis of Memristor Circuit Based on Its van der Pol Oscillator


Abstract
1. Introduction
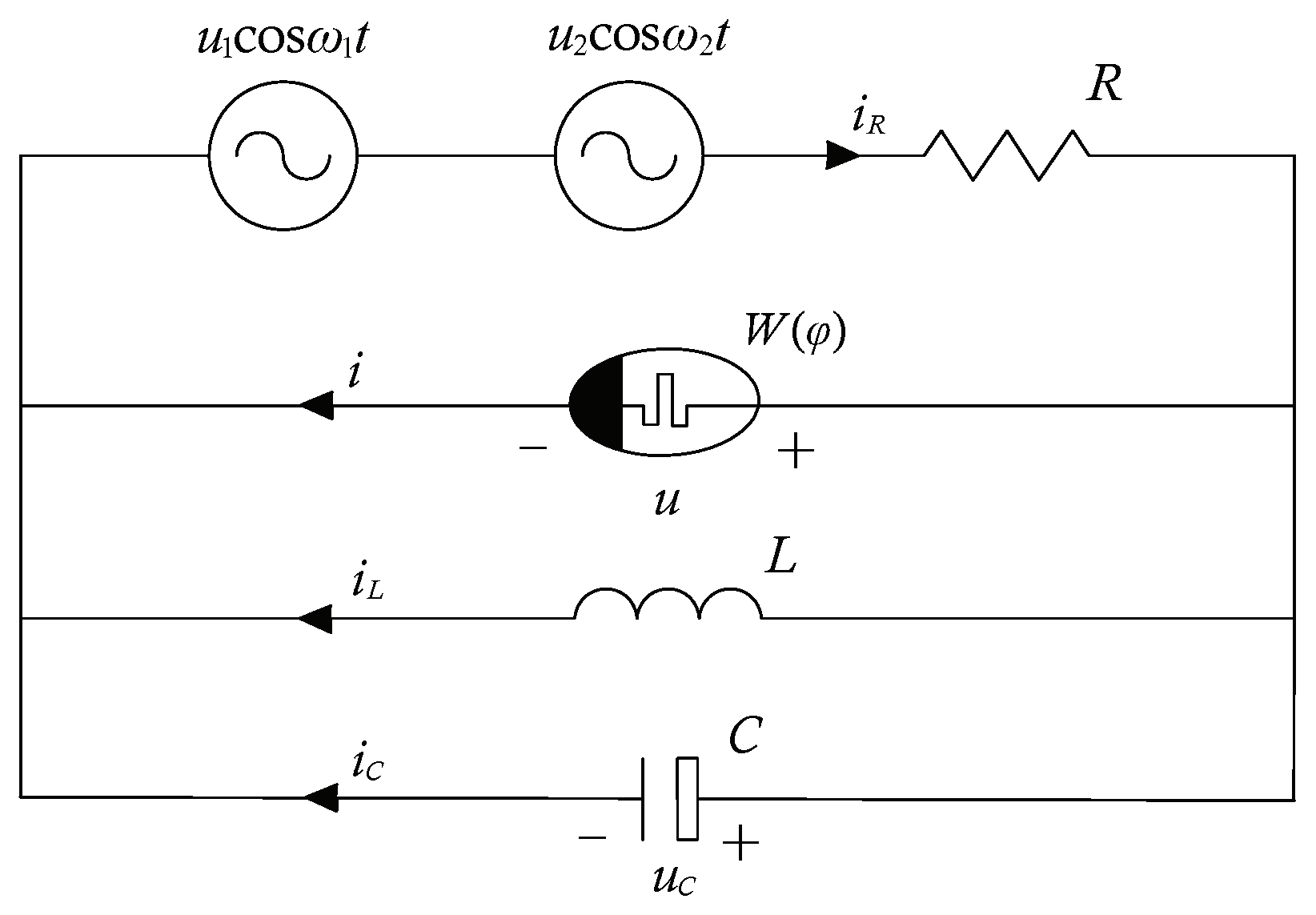
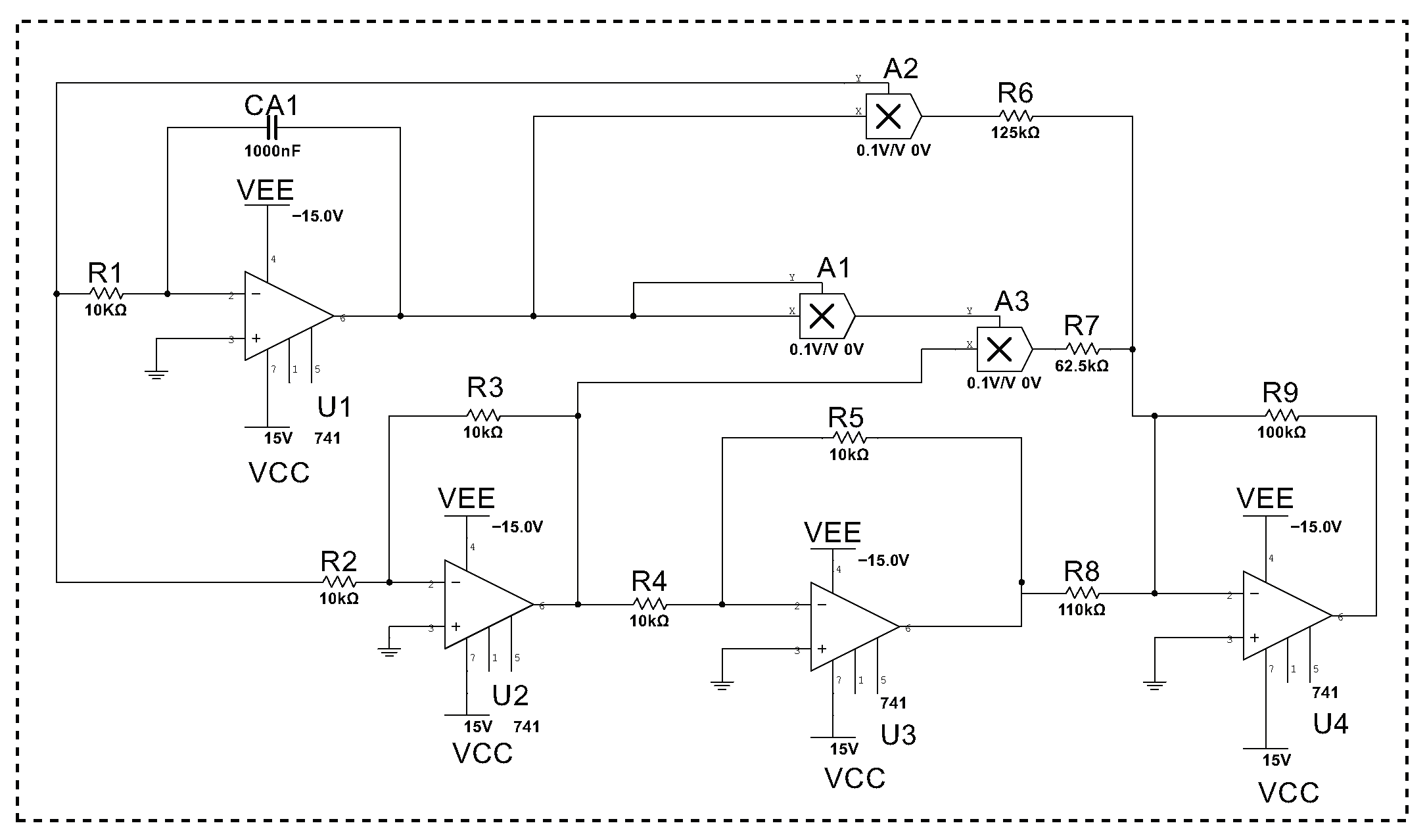
2. Memristor Circuit Based on van der Pol Oscillation Model
3. Symplectic Dynamic Analysis of van der Pol Self-Excited Oscillator
3.1. Equilibria and Stability
3.2. Hamiltonian and Exact Solution of Oscillator
3.2.1. Exact Solution Method
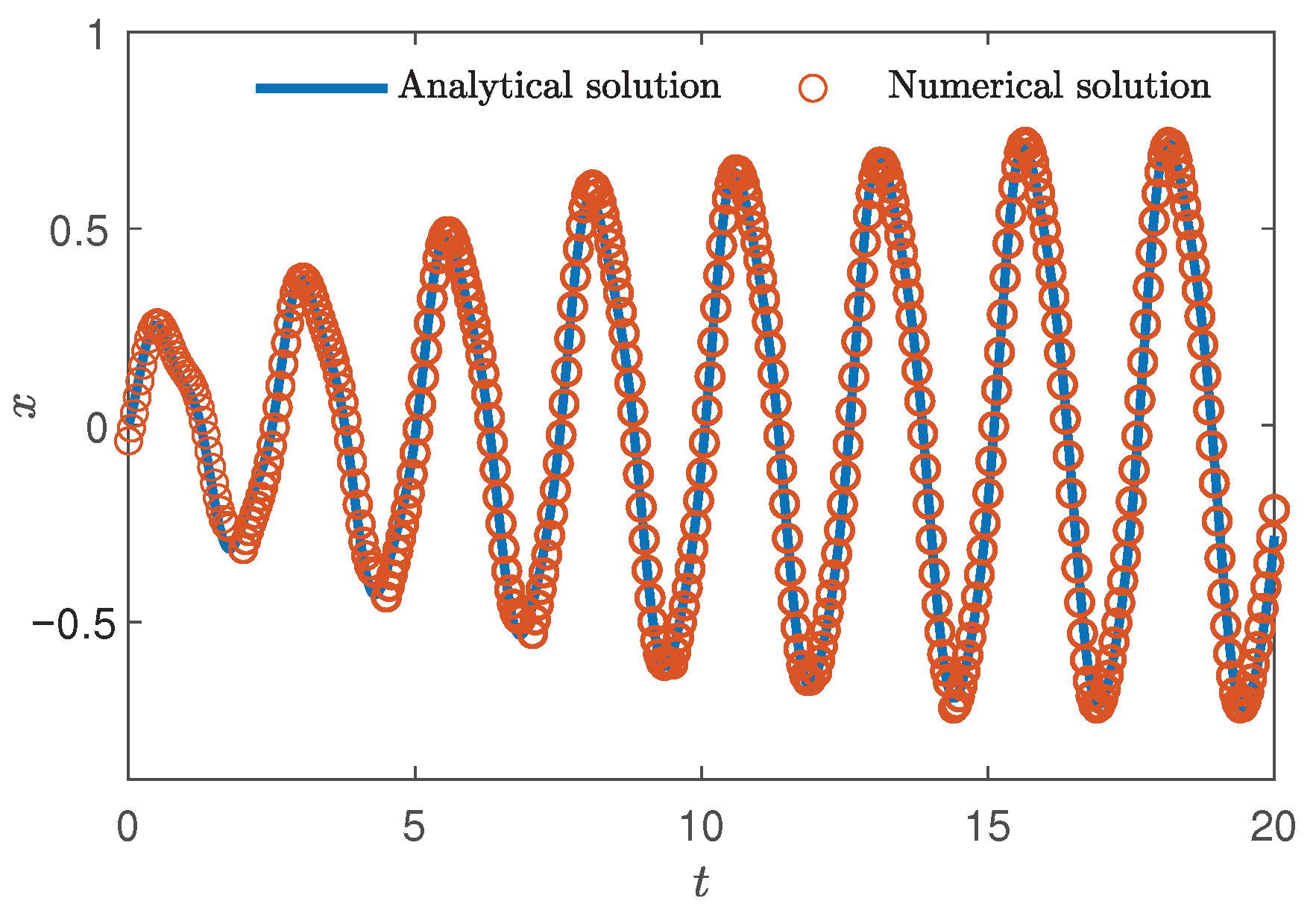
3.2.2. Numerical Simulation
3.3. Solutions of Numerical Scheme
3.3.1. Euler Scheme
3.3.2. Symplectic Euler Scheme
3.3.3. Four-Order Runge–Kutta Scheme
3.3.4. Four-Order Symplectic Runge–Kutta–Nyström Scheme
3.4. Numerical Simulation
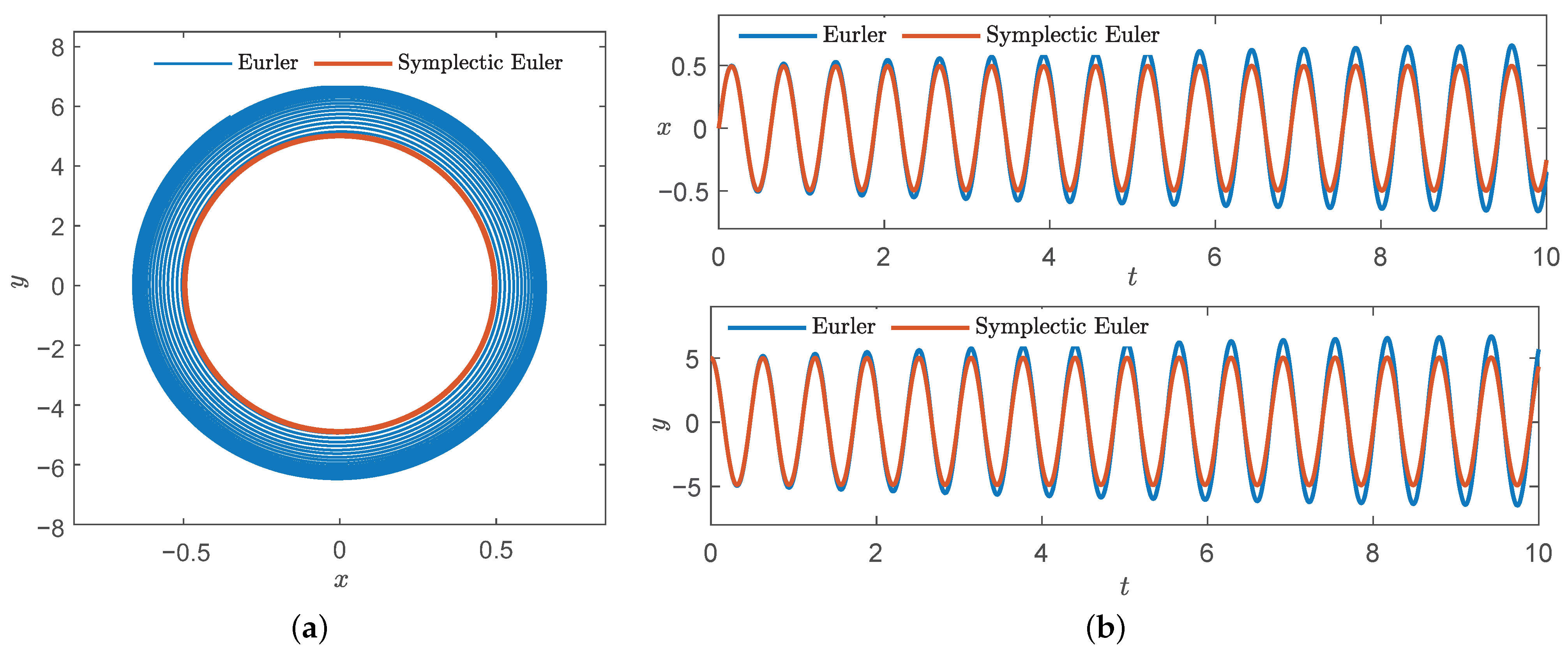
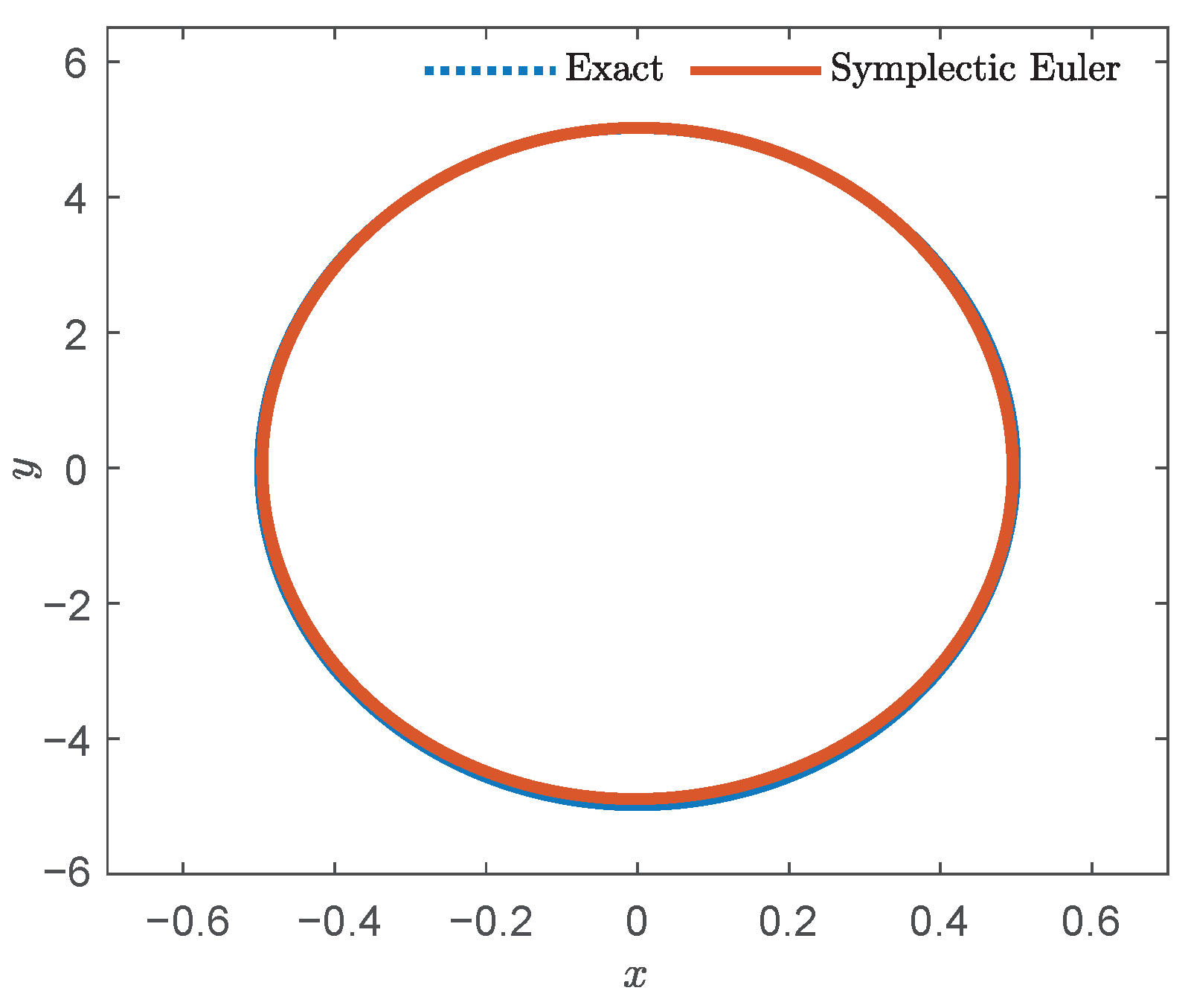
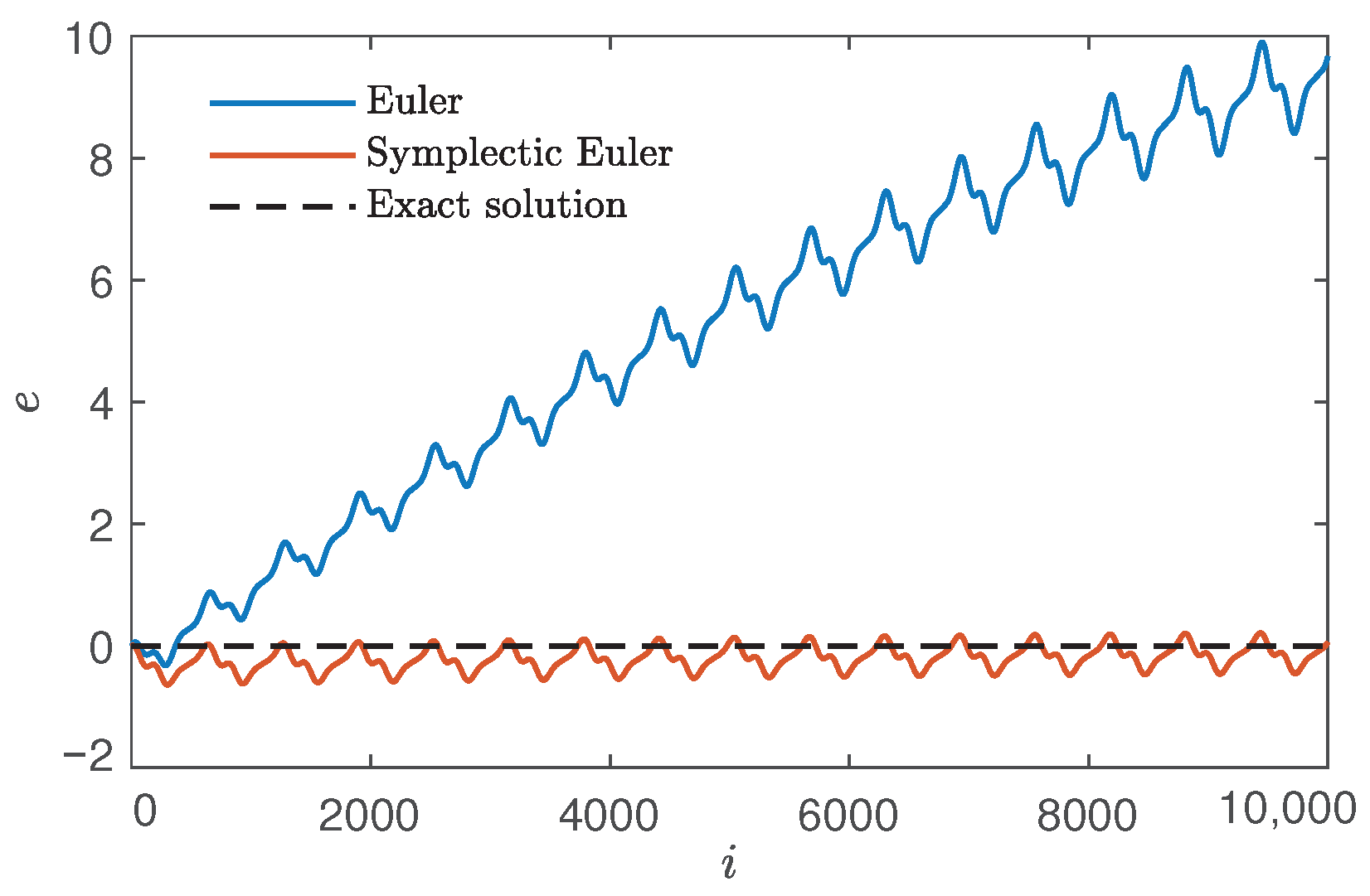
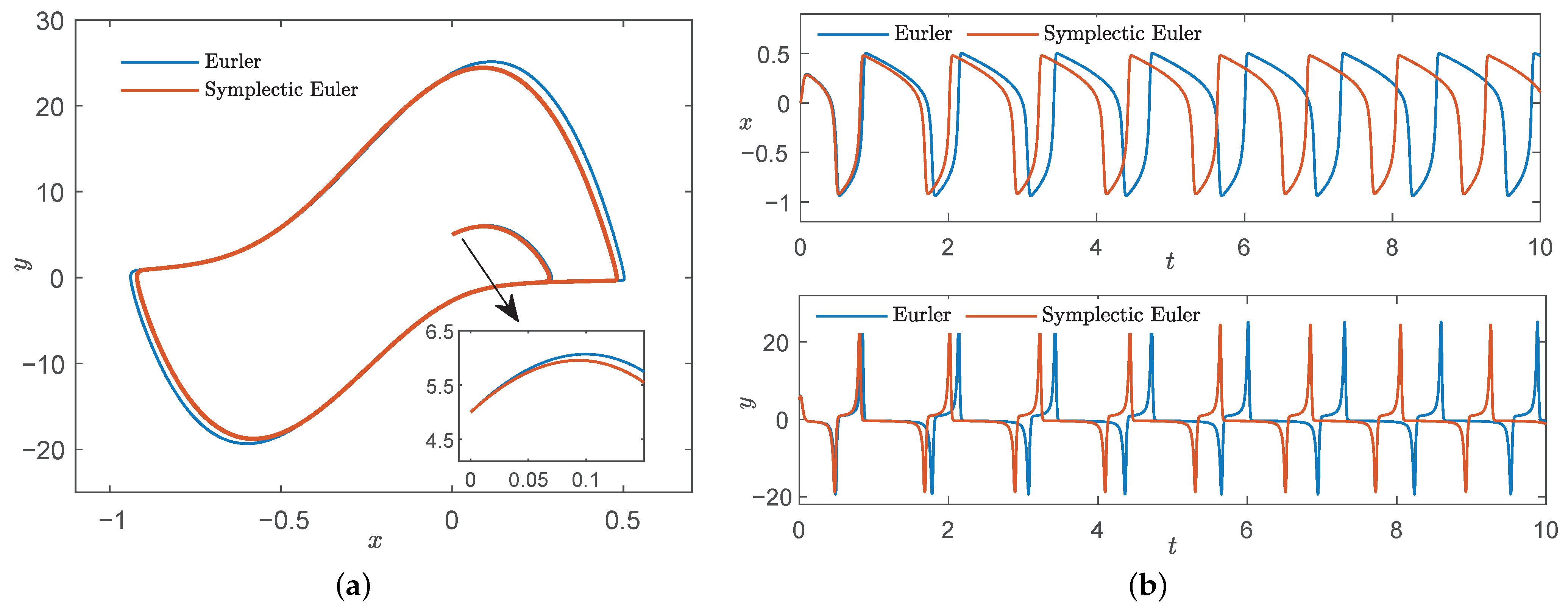
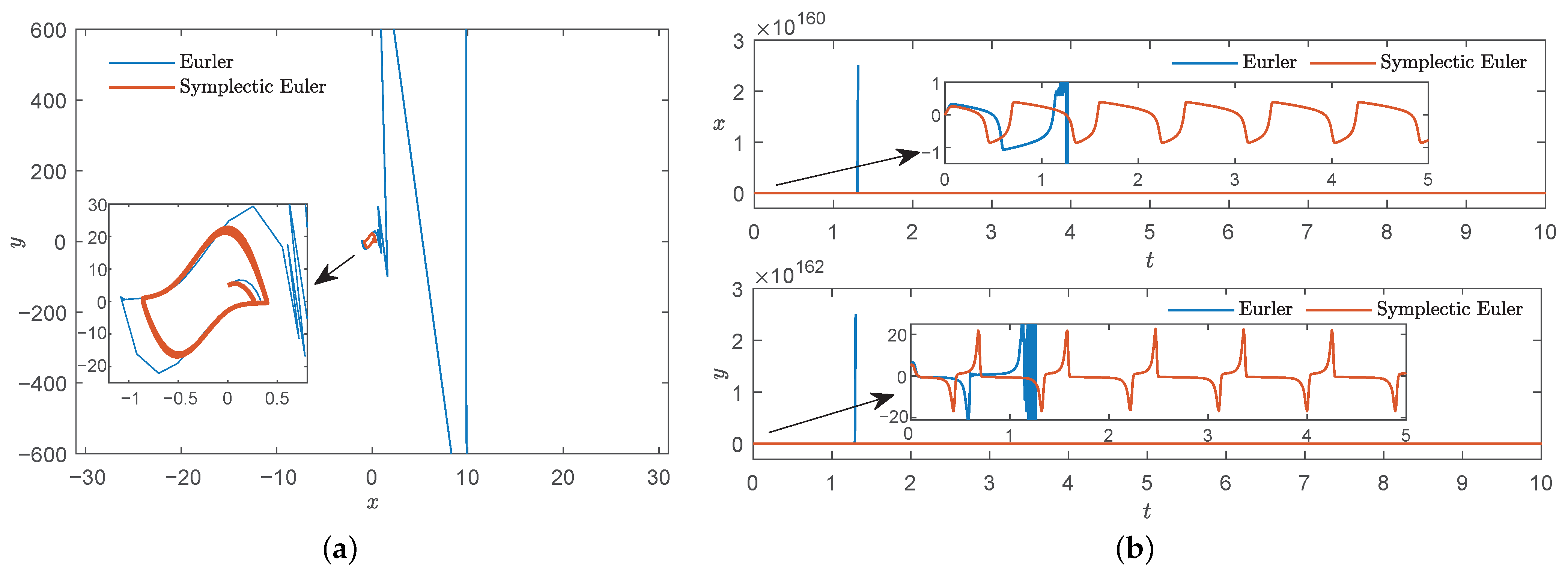
3.4.1. Euler Method and Symplectic Euler Method
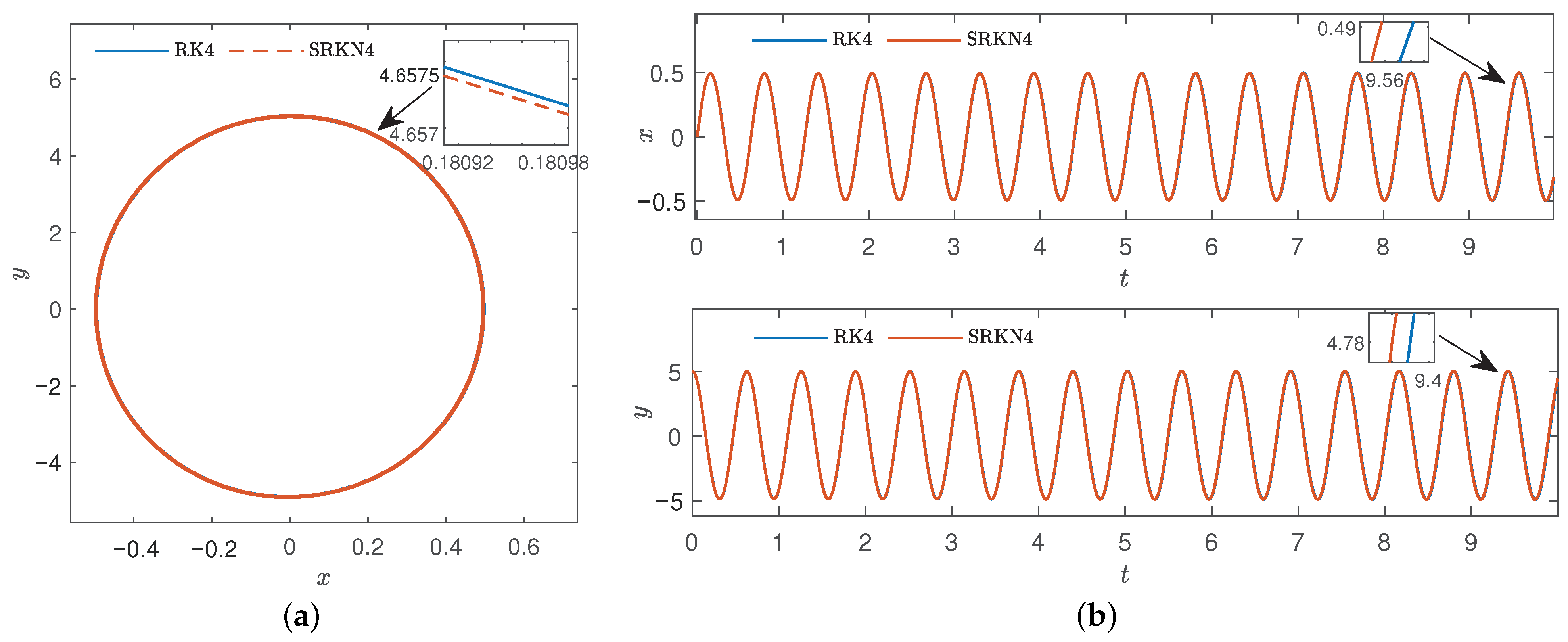
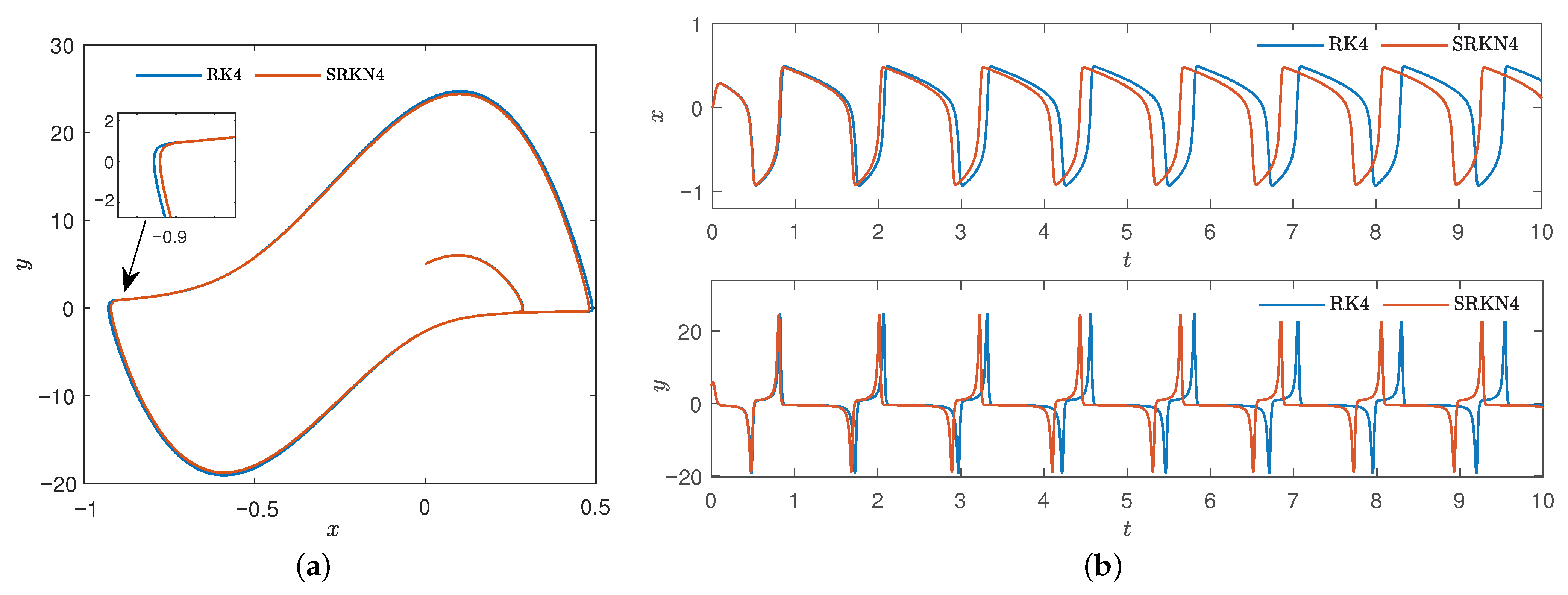
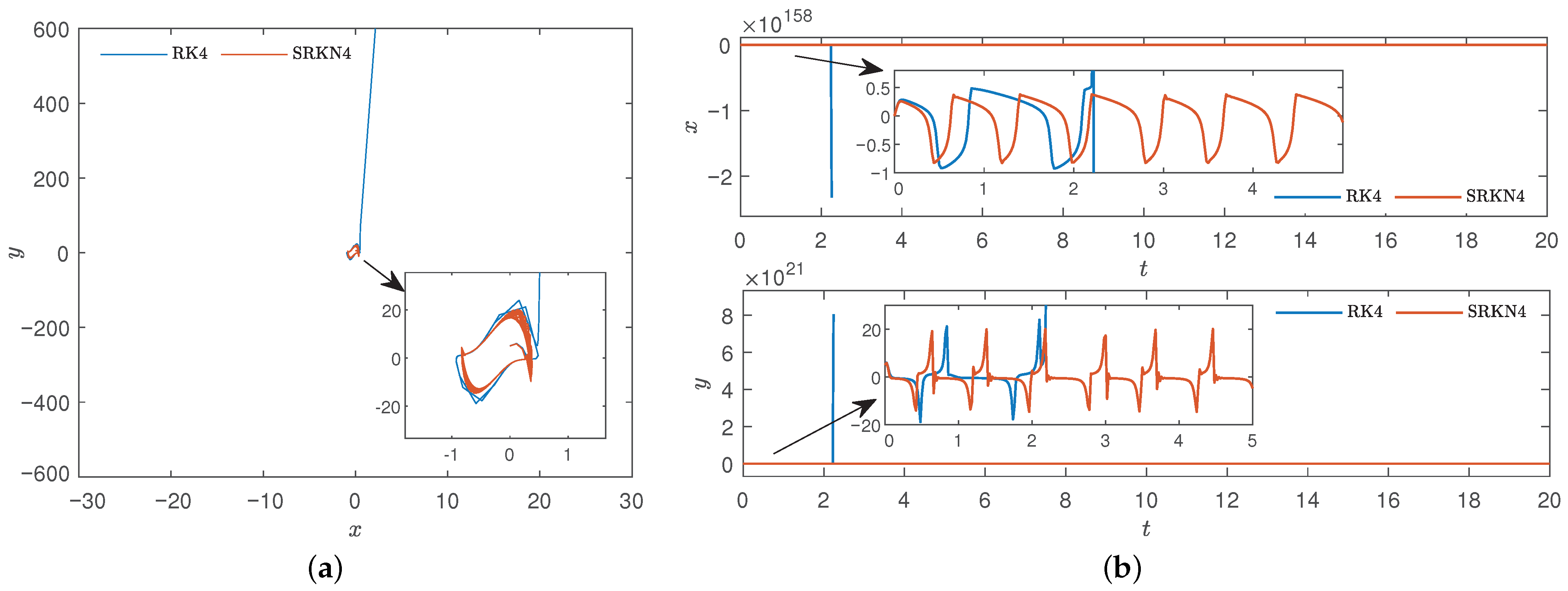
3.4.2. Runge–Kutta Method and Symplectic Runge–Kutta–Nyström Method
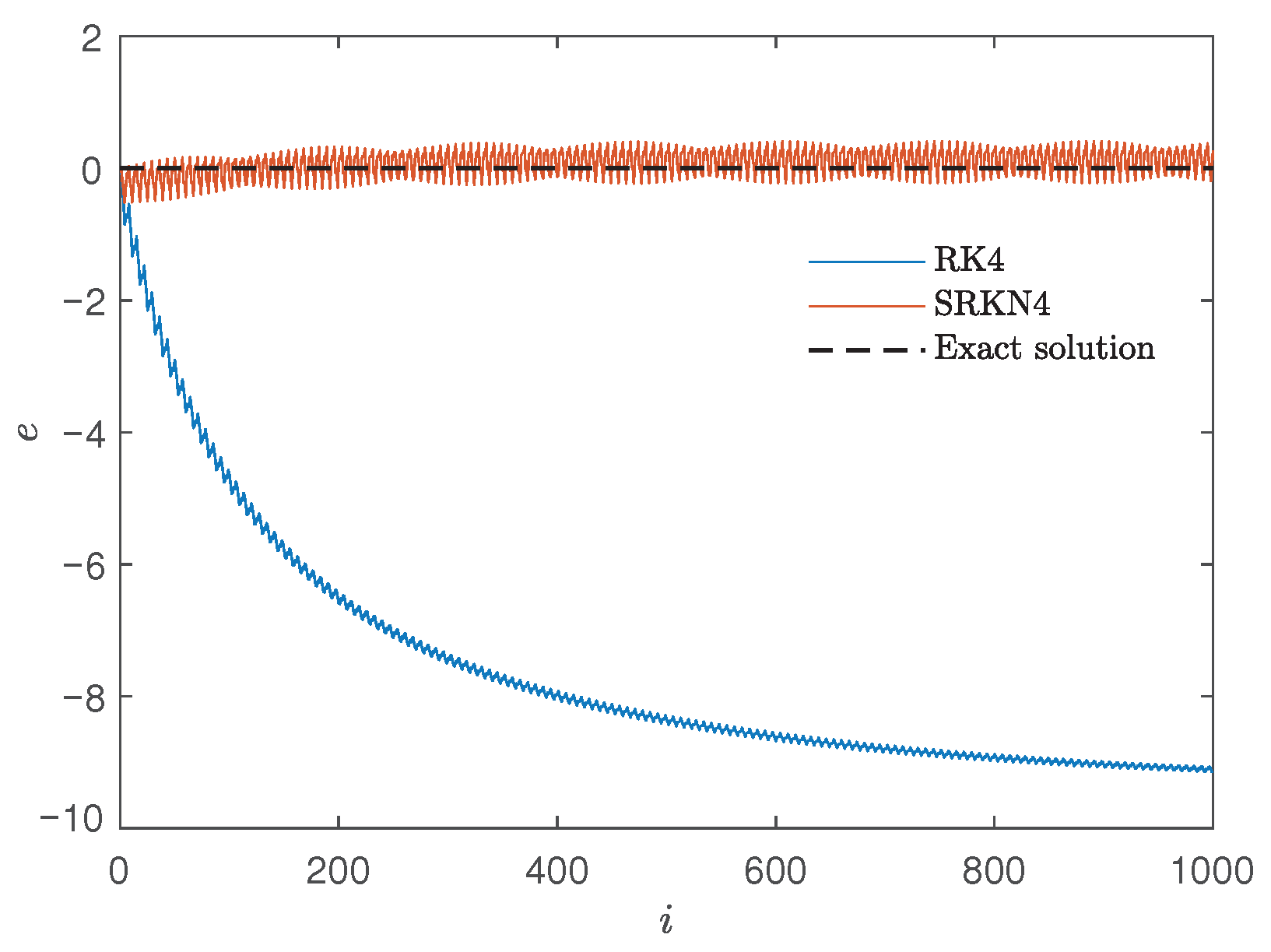
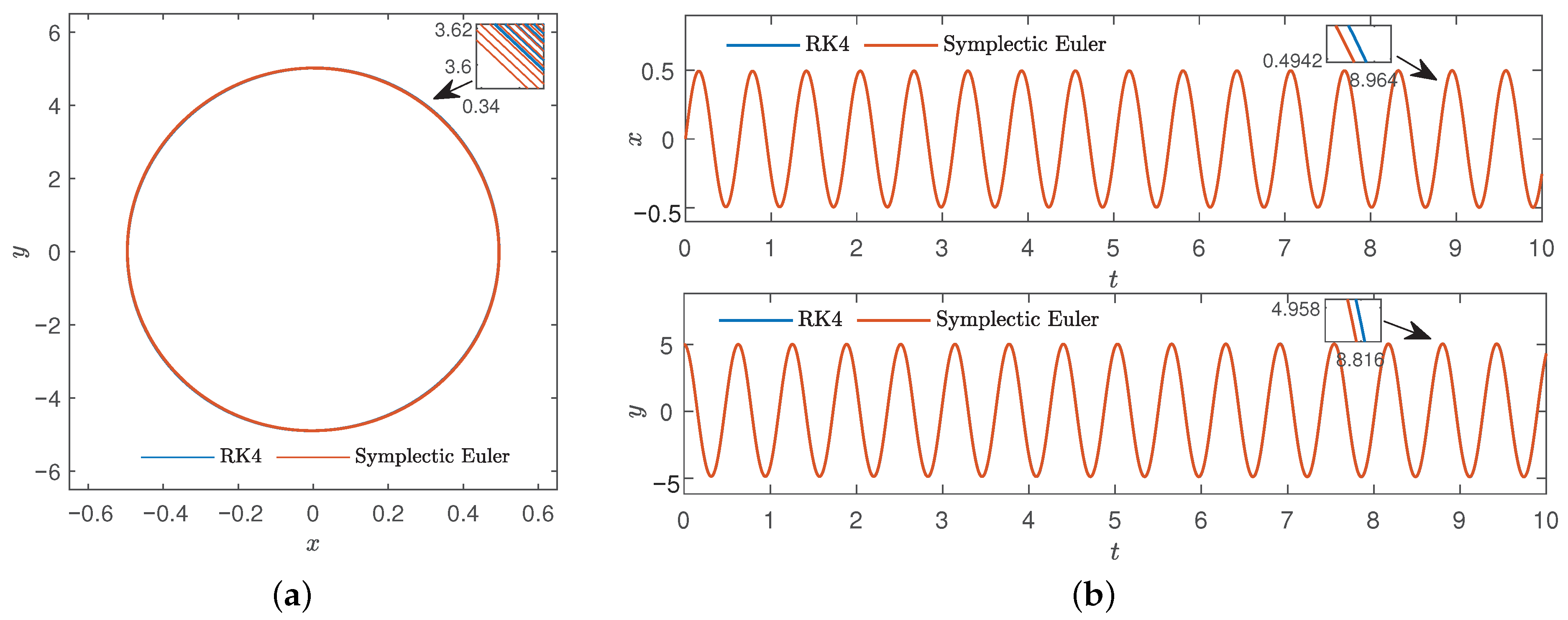
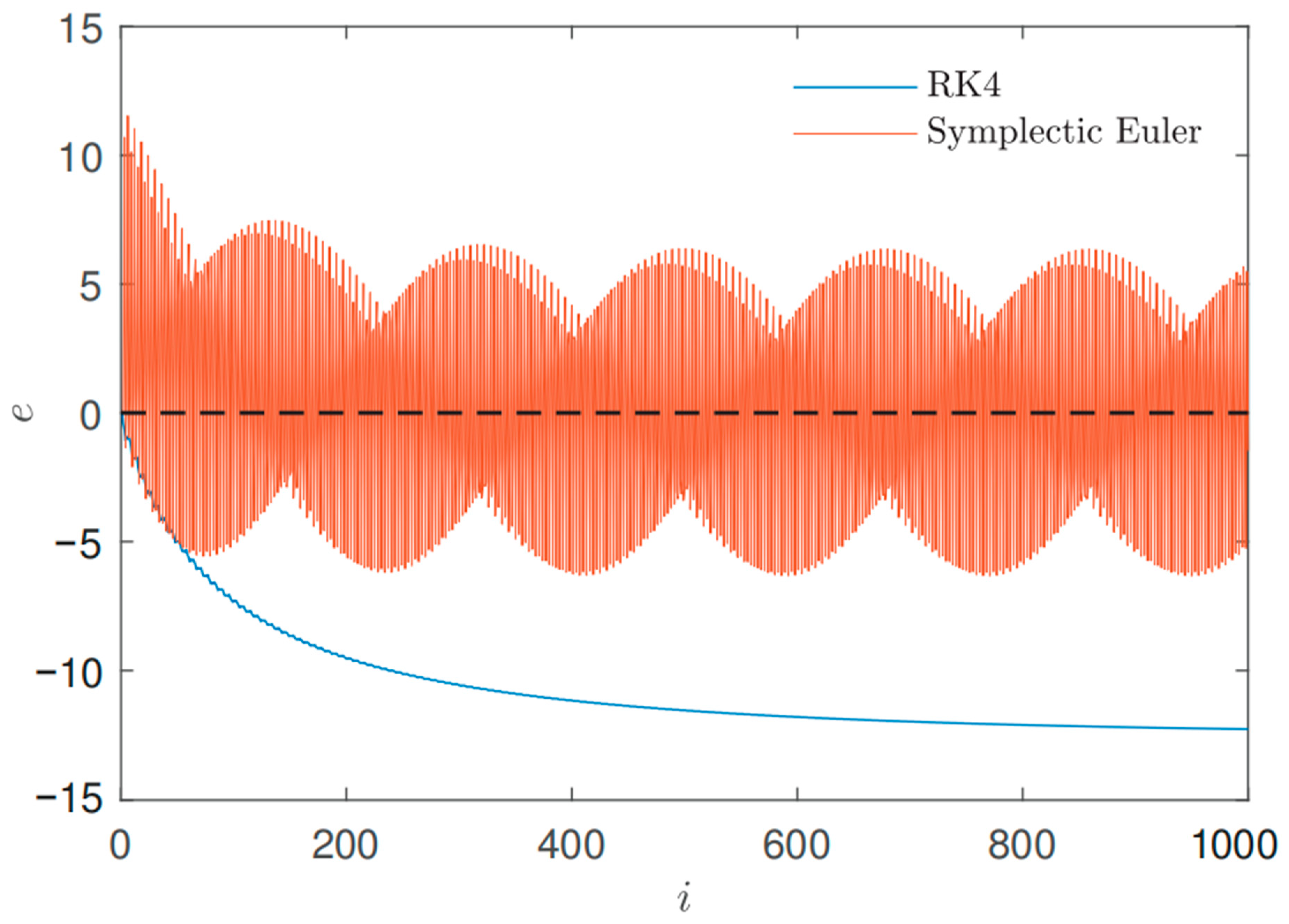
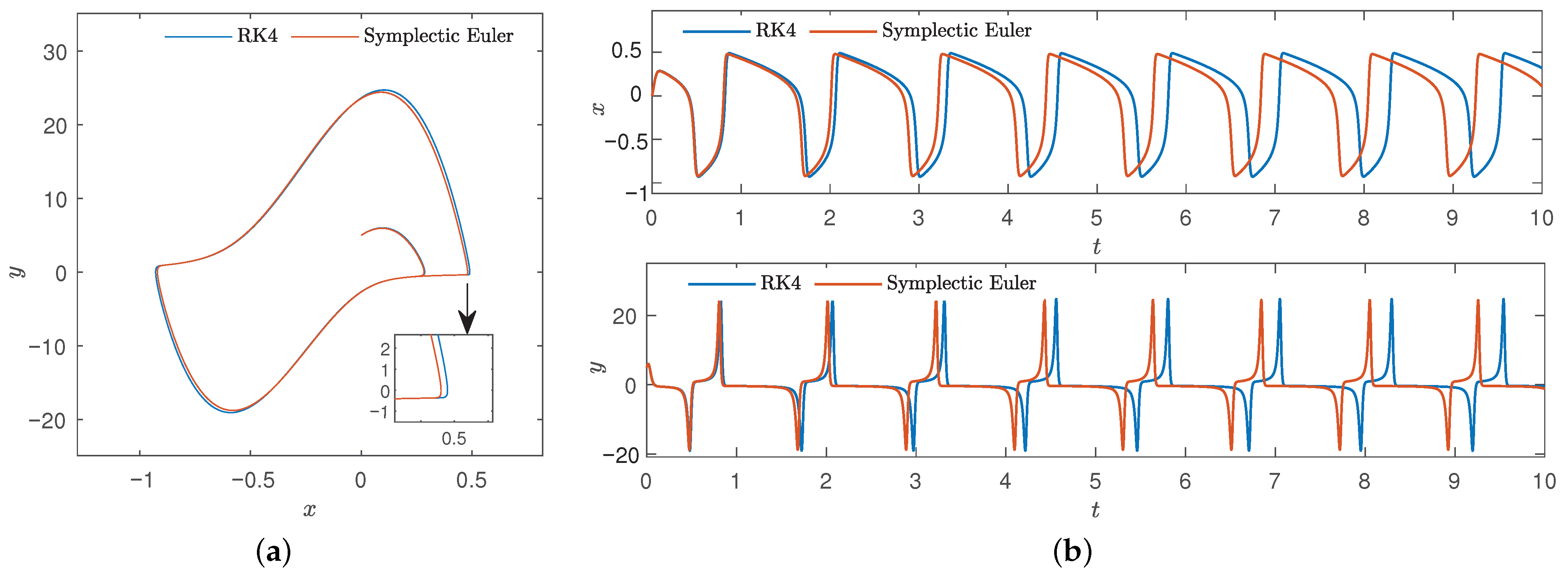
3.4.3. Symplectic Euler Method and Four-Order Runge–Kutta Method
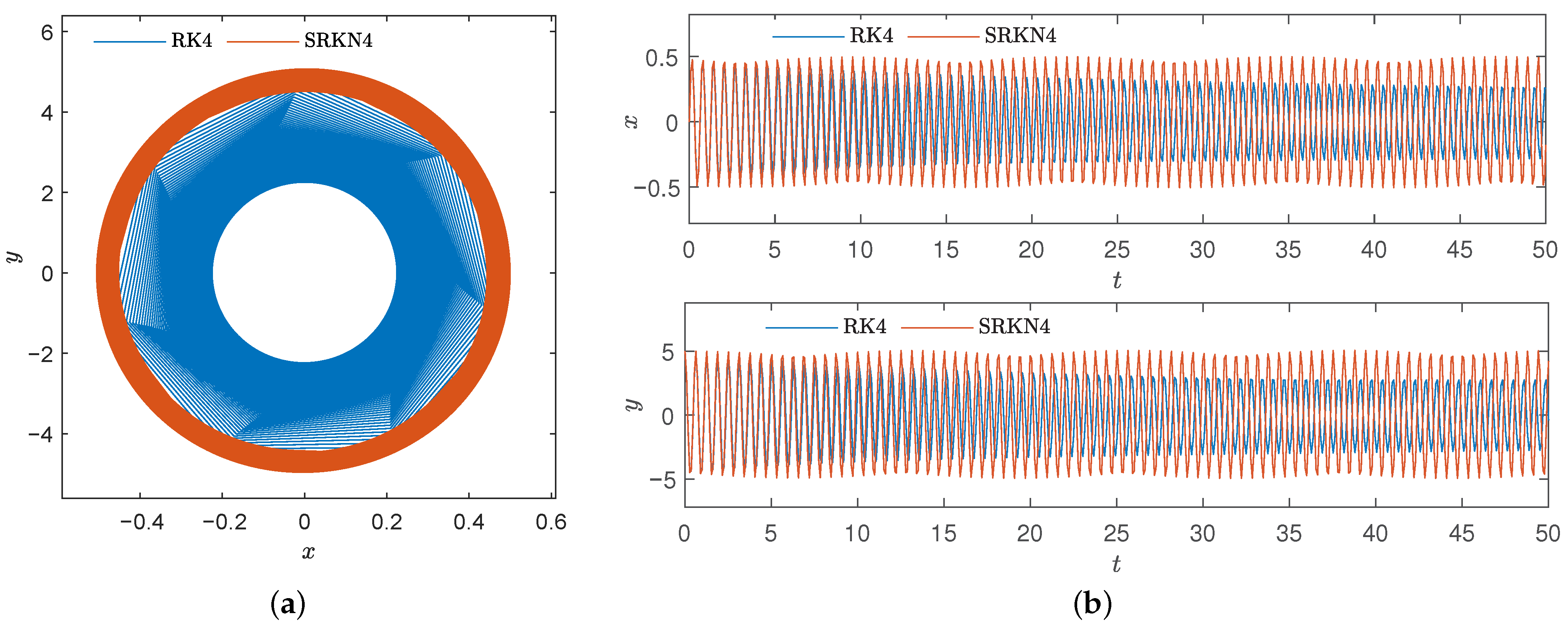
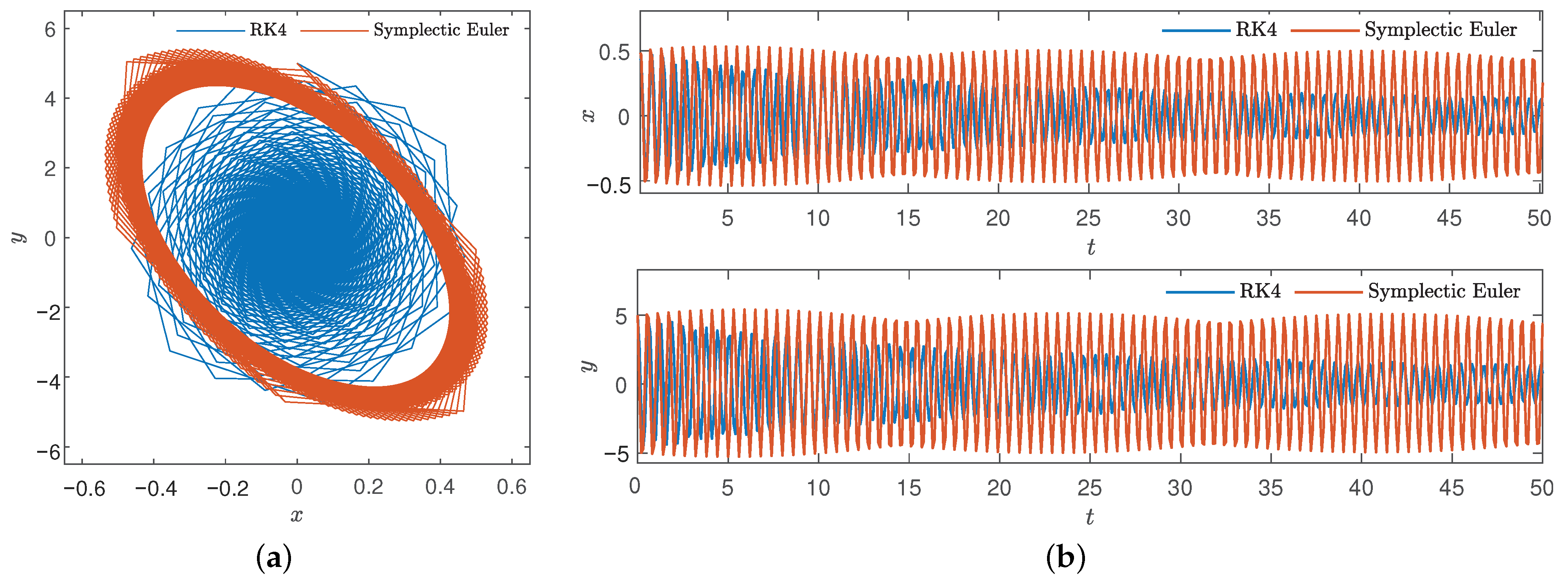
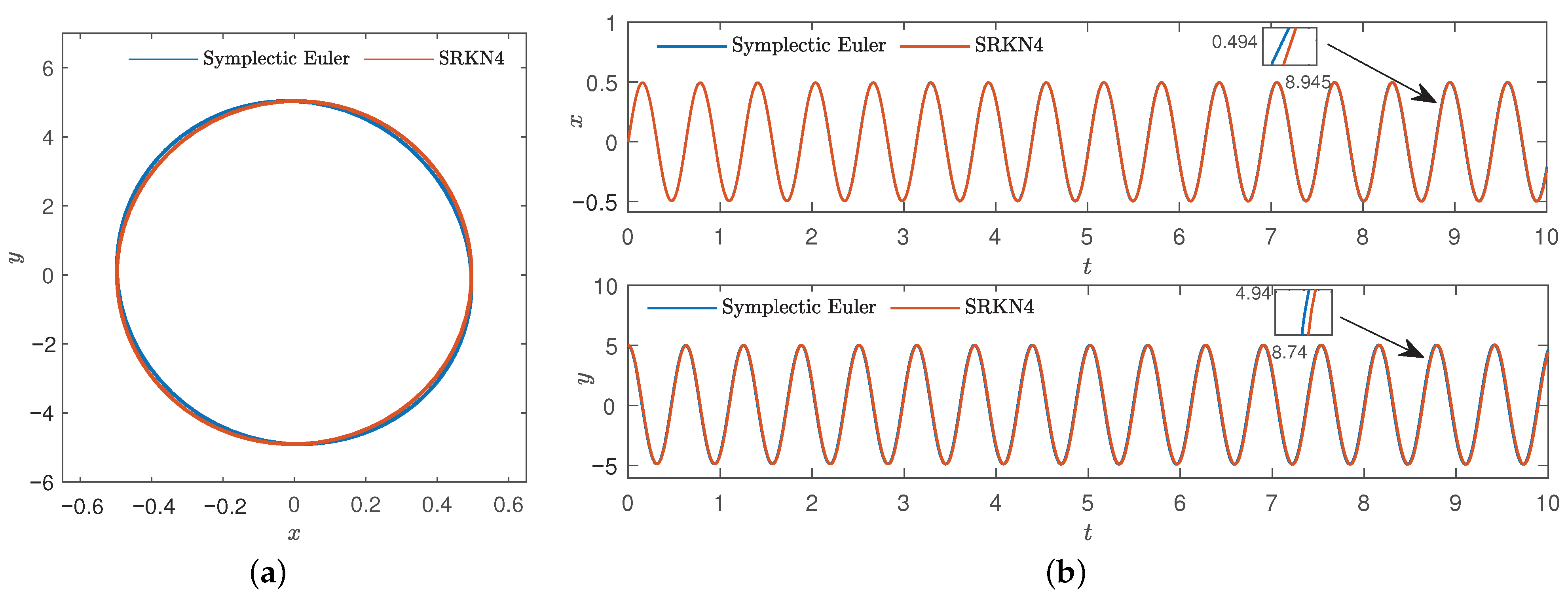
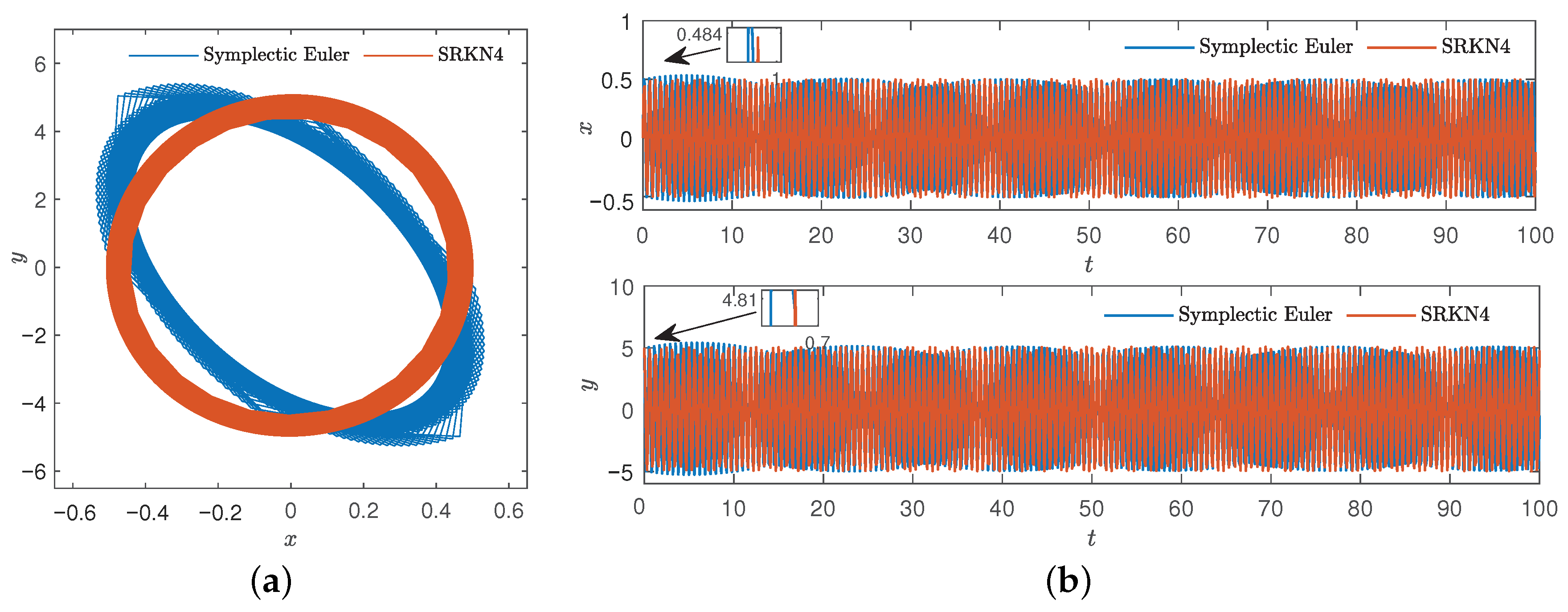
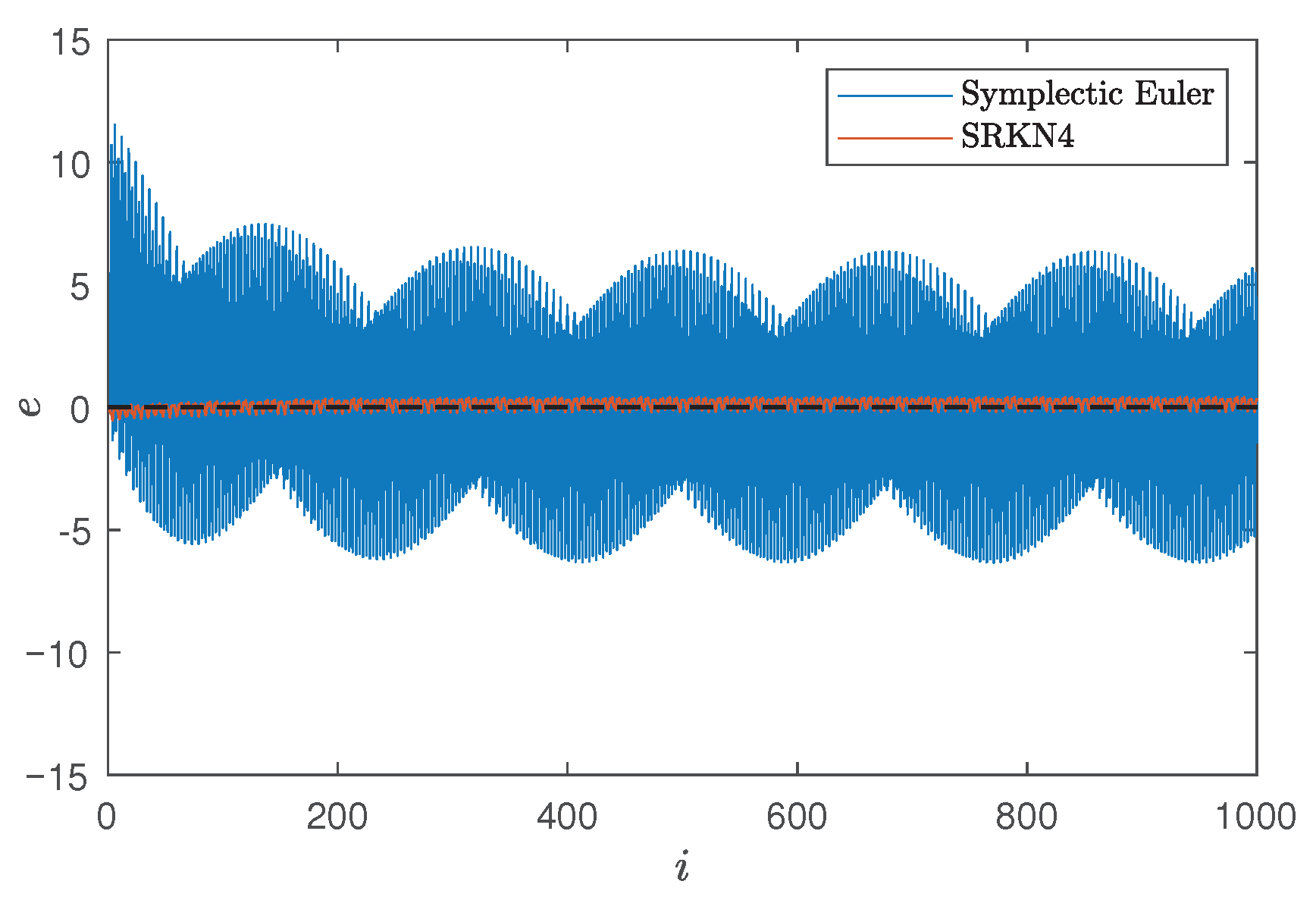
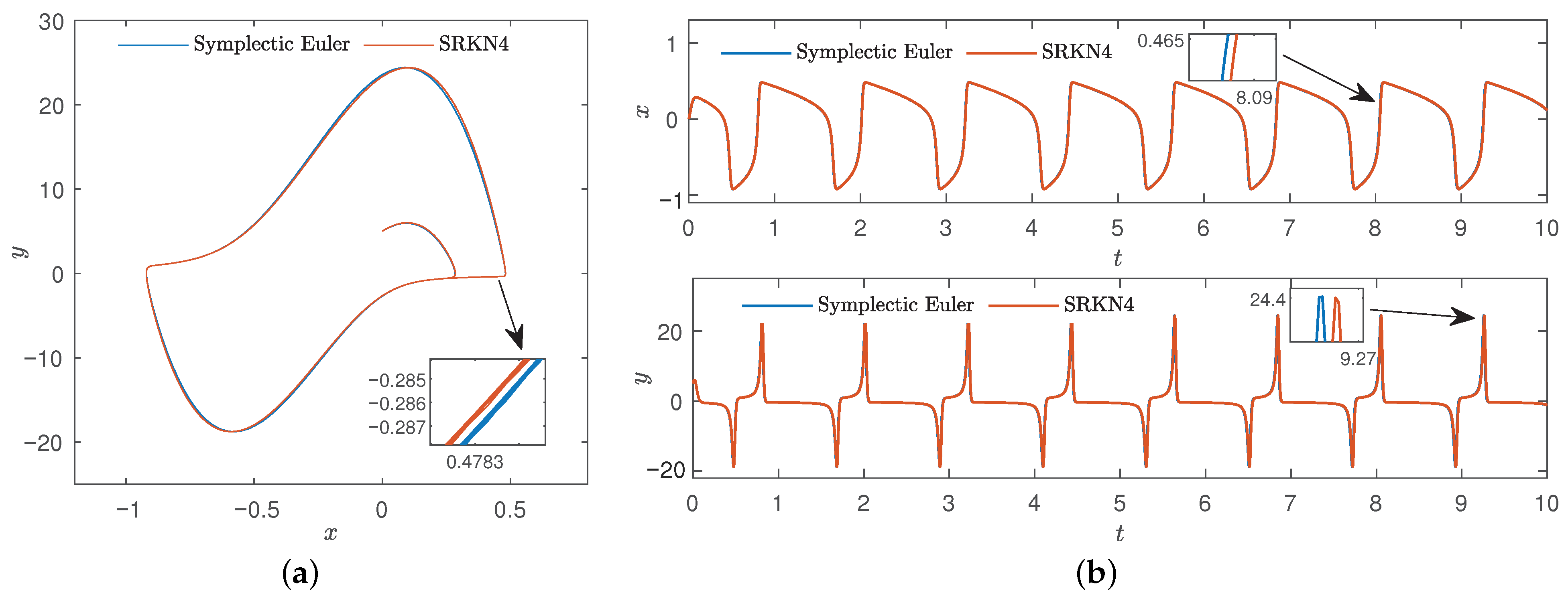
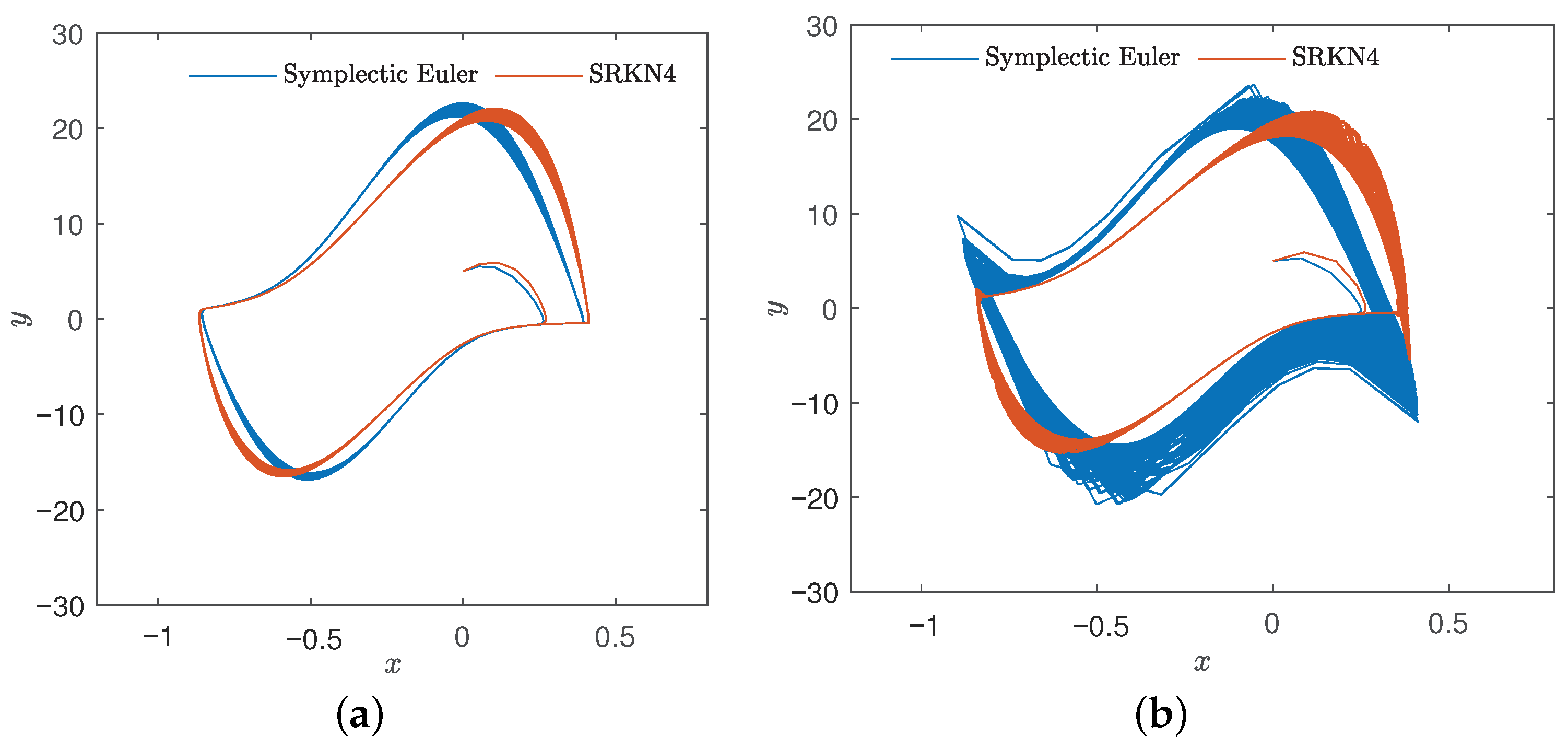
3.4.4. Symplectic Euler Method and Symplectic Runge–Kutta–Nyström Method
4. Primary and Subharmonic Simultaneous Resonance of Forced van der Pol Oscillator
4.1. First-Order Approximate Solution of Primary and Subharmonic Simultaneous Resonance
4.2. Steady Solution and Its Stability Conditions
4.3. Analysis of Chaotic Dynamics
4.3.1. Dynamical Behaviors of
4.3.2. Dynamical Behaviors of
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Van Der Pol, B. VII. Forced oscillations in a circuit with non-linear resistance. (Reception with reactive triode). Lond. Edinb. Dublin Philos. Mag. J. Sci. 1927, 3, 65–80. [Google Scholar] [CrossRef]
- Kpomahou, Y.J.F.; Miwadinou, C.H.; Agbokpanzo, R.G.; Hinvi, L.A. Nonlinear dynamics of a RLC series circuit modeled by a generalized van der Pol oscillator. Int. J. Nonlinear Sci. Numer. Simul. 2021, 22, 479–494. [Google Scholar] [CrossRef]
- Semenov, A.; Semenova, O.; Osadchuk, O.; Osadchuk, I.; Baraban, S.; Rudyk, A.; Safonyk, A.; Voznyak, O. Van der Pol Oscillators Based on Transistor Structures with Negative Differential Resistance for Infocommunication System Facilities; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Liang, H.; Wang, Z.; Yue, Z.; Lu, R. Generalized synchronization and control for incommensurate fractional unified chaotic system and applications in secure communication. Kybernetika 2012, 48, 190–205. [Google Scholar]
- Raja, M.A.Z.; Shah, F.H.; Syam, M.I. Intelligent computing approach to solve the nonlinear van der Pol system for heartbeat model. Neural Comput. Appl. 2018, 30, 3651–3675. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, C.; Wang, Z.; Kong, W. Combining sparse representation and singular value decomposition for plant recognition. Appl. Soft Comput. 2018, 67, 164–171. [Google Scholar] [CrossRef]
- He, L.; Yi, L.; Tang, P. Numerical scheme and dynamic analysis for variable-order fractional van der Pol model of nonlinear economic cycle. Adv. Differ. Equ. 2016, 2016, 195. [Google Scholar] [CrossRef]
- Chua, L.O. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Kim, H.; Sah, M.P.; Yang, C.; Cho, S.; Chua, L.O. Memristor emulator for memristor circuit applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2422–2431. [Google Scholar]
- Li, C.; Yang, Y.; Du, J.; Chen, Z. A simple chaotic circuit with magnetic flux-controlled memristor. Eur. Phys. J. Spec. Top. 2021, 230, 1723–1736. [Google Scholar] [CrossRef]
- Madan, R.N. Chua’s Circuit: A Paradigm for Chaos; World Scientific: Singapore, 1993. [Google Scholar]
- Itoh, M.; Chua, L.O. Dynamics of memristor circuits. Int. J. Bifurc. Chaos 2014, 24, 1430015. [Google Scholar] [CrossRef]
- Jang, Y.H.; Kim, W.; Kim, J.; Woo, K.S.; Lee, H.J.; Jeon, J.W.; Shim, S.K.; Han, J.; Hwang, C.S. Time-varying data processing with nonvolatile memristor-based temporal kernel. Nat. Commun. 2021, 12, 5727. [Google Scholar] [CrossRef]
- Talukdar, A.; Radwan, A.G.; Salama, K.N. Nonlinear dynamics of memristor based 3rd order oscillatory system. Microelectron. J. 2012, 43, 169–175. [Google Scholar] [CrossRef][Green Version]
- Corinto, F.; Forti, M. Complex dynamics in arrays of memristor oscillators via the flux–charge method. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 65, 1040–1050. [Google Scholar] [CrossRef]
- Ishaq Ahamed, A.; Lakshmanan, M. Nonsmooth bifurcations, transient hyperchaos and hyperchaotic beats in a memristive Murali–Lakshmanan–Chua circuit. Int. J. Bifurc. Chaos 2013, 23, 1350098. [Google Scholar] [CrossRef]
- Varshney, V.; Sabarathinam, S.; Prasad, A.; Thamilmaran, K. Infinite number of hidden attractors in memristor-based autonomous duffing oscillator. Int. J. Bifurc. Chaos 2018, 28, 1850013. [Google Scholar] [CrossRef]
- Sun, J.; Zhao, X.; Fang, J.; Wang, Y. Autonomous memristor chaotic systems of infinite chaotic attractors and circuitry realization. Nonlinear Dyn. 2018, 94, 2879–2887. [Google Scholar] [CrossRef]
- Wang, Z.; Parastesh, F.; Rajagopal, K.; Hamarash, I.I.; Hussain, I. Delay-induced synchronization in two coupled chaotic memristive Hopfield neural networks. Chaos Solitons Fractals 2020, 134, 109702. [Google Scholar] [CrossRef]
- Hairer, E.; Hochbruck, M.; Iserles, A.; Lubich, C. Geometric numerical integration. Oberwolfach Rep. 2006, 3, 805–882. [Google Scholar] [CrossRef]
- McLachlan, R.I.; Quispel, G.R.W. Geometric integrators for ODEs. J. Phys. A Math. Gen. 2006, 39, 5251. [Google Scholar] [CrossRef]
- De Vogelaere, R. Methods of Integration Which Preserve the Contact Transformation Property of the Hamilton Equations; Technical Report; University of Notre Dame: Notre Dame, IN, USA, 1956. [Google Scholar]
- Feng, K.; Qin, M. The Symplectic Methods for the Computation of Hamiltonian Equations; Springer: Berlin/Heidelberg, Germany, 1987. [Google Scholar]
- Channell, P.J.; Scovel, C. Symplectic integration of Hamiltonian systems. Nonlinearity 1990, 3, 231. [Google Scholar] [CrossRef]
- Sanz-Serna, J.M. Runge-Kutta schemes for Hamiltonian systems. BIT Numer. Math. 1988, 28, 877–883. [Google Scholar] [CrossRef]
- Lasagni, F. Canonical runge-kutta methods. Z. Angew. Math. Phys. 1988, 39, 952–953. [Google Scholar] [CrossRef]
- Ruth, R.D. A canonical integration technique. IEEE Trans. Nucl. Sci. 1983, 30, 2669–2671. [Google Scholar] [CrossRef]
- Yoshida, H. Construction of higher order symplectic integrators. Phys. Lett. A 1990, 150, 262–268. [Google Scholar] [CrossRef]
- Qin, M.; Meiqing, Z. Multi-stage symplectic schemes of two kinds of Hamiltonian systems for wave equations. Comput. Math. Appl. 1990, 19, 51–62. [Google Scholar]
- Berg, J.; Warnock, R.; Ruth, R.; Forest, E. Construction of symplectic maps for nonlinear motion of particles in accelerators. Phys. Rev. E 1994, 49, 722. [Google Scholar] [CrossRef]
- Yoshida, H. Non-existence of the modified first integral by symplectic integration methods. Phys. Lett. A 2001, 282, 276–283. [Google Scholar] [CrossRef]
- Cieśliński, J.L.; Ratkiewicz, B. Long-time behaviour of discretizations of the simple pendulum equation. J. Phys. A Math. Theor. 2009, 42, 105204. [Google Scholar] [CrossRef]
- Hashemi, M.S. Constructing a new geometric numerical integration method to the nonlinear heat transfer equations. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 990–1001. [Google Scholar] [CrossRef]
- Cieśliński, J.L.; Kobus, A. Locally Exact Integrators for the Duffing Equation. Mathematics 2020, 8, 231. [Google Scholar] [CrossRef]
- Curry, C.; Owren, B. Variable step size commutator free Lie group integrators. Numer. Algorithms 2019, 82, 1359–1376. [Google Scholar] [CrossRef]
- Zadra, F.; Bravetti, A.; Seri, M. Geometric numerical integration of Liénard systems via a contact Hamiltonian approach. Mathematics 2021, 9, 1960. [Google Scholar] [CrossRef]
- Chen, Z.; Raman, B.; Stern, A. Structure-Preserving Numerical Integrators for Hodgkin–Huxley-Type Systems. SIAM J. Sci. Comput. 2020, 42, B273–B298. [Google Scholar] [CrossRef]
- Kobus, A.; Cieśliński, J.L. Para-Hamiltonian form for General Autonomous ODE Systems: Introductory Results. Entropy 2022, 24, 338. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, P.; Chen, M.; Wang, Y. Dynamic analysis and robust control of a chaotic system with hidden attractor. Complexity 2021, 2021, 8865522. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Orozco-López, O.; Munoz-Pacheco, J.M.; Alotaibi, N.D.; Volos, C.; Wang, Z.; Sevilla-Escoboza, R.; Chu, Y.M. Simulation and experimental validation of a non-equilibrium chaotic system. Chaos Solitons Fractals 2021, 143, 110539. [Google Scholar] [CrossRef]
- Wang, Z.; Baruni, S.; Parastesh, F.; Jafari, S.; Ghosh, D.; Perc, M.; Hussain, I. Chimeras in an adaptive neuronal network with burst-timing-dependent plasticity. Neurocomputing 2020, 406, 117–126. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, Z.; Sun, K.; He, S.; Wang, H.; Xu, Q.; Chen, M. Chaotic flows with special equilibria. Eur. Phys. J. Spec. Top. 2020, 229, 905–919. [Google Scholar] [CrossRef]
- Tian, H.; Wang, Z.; Zhang, H.; Cao, Z.; Zhang, P. Dynamical analysis and fixed-time synchronization of a chaotic system with hidden attractor and a line equilibrium. Eur. Phys. J. Spec. Top. 2022, 1–12. [Google Scholar] [CrossRef]
- Shen, Y.; Yang, S.; Xing, H. Super-harmonic resonance of fractional-order Duffing oscillator. Chin. J. Theor. Appl. Mech. 2012, 44, 762–768. [Google Scholar]
- Han, X.; Lin, W.; Xu, Y.; Mo, J. Asymptotic solution to the generalized Duffing equation for disturbed oscillator in stochastic resonance. Acta Phys. Sin. 2014, 63, 35–39. [Google Scholar]
- Niu, J.; Liu, R.; Shen, Y.; Yang, S. Chaos detection of Duffing system with fractional-order derivative by Melnikov method. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 123106. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Yang, S.; Xing, H.; Gao, G. Primary resonance of Duffing oscillator with fractional-order derivative. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3092–3100. [Google Scholar] [CrossRef]
- Hassan, A. On the third superharmonic resonance in the Duffing oscillator. J. Sound Vib. 1994, 172, 513–526. [Google Scholar] [CrossRef]
- Van Khang, N.; Chien, T.Q. Subharmonic resonance of Duffing oscillator with fractional-order derivative. J. Comput. Nonlinear Dyn. 2016, 11, 051018. [Google Scholar] [CrossRef]
- Yang, S.; Nayfeh, A.H.; Mook, D.T. Combination resonances in the response of the Duffing oscillator to a three-frequency excitation. Acta Mech. 1998, 131, 235–245. [Google Scholar] [CrossRef]
- Li, H.; Shen, Y.; Li, X.; Han, Y.; Peng, M. Primary and subharmonic simultaneous resonance of Duffing oscillator. Chin. J. Theor. Appl. Mech. 2020, 52, 514–521. [Google Scholar]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Chua, L.O.; Kang, S.M. Memristive devices and systems. Proc. IEEE 1976, 64, 209–223. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; He, S.; Wang, D.; Zhang, B. Memristor based van der Pol oscillation circuit. Int. J. Bifurc. Chaos 2014, 24, 1450154. [Google Scholar] [CrossRef]
- Zhang, Z.; Ding, T.; Huang, W. Qualitative Theory of Differential Equations; Science Press: Beijing, China, 1985. [Google Scholar]
- Zhang, J.; Feng, B. Geometric Theory of Ordinary Differential Equations and Bifurcation Problems; Peking University Press: Beijing, China, 2000. [Google Scholar]
- Cieśliński, J.L.; Ratkiewicz, B. On simulations of the classical harmonic oscillator equation by difference equations. Adv. Differ. Equ. 2006, 2006, 040171. [Google Scholar] [CrossRef]
- Yang, S.; Shen, Y. Singularity and Bifurcation of Hysteretic Nonlinear System; Science Press: Beijing, China, 2003. [Google Scholar]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions of | Equilibria | Equilibria Properties |
|---|---|---|
| Unstable Node | ||
| Unstable Degenerate Node | ||
| Unstable Focus | ||
| Center | ||
| Stable Focus | ||
| Stable Node |
| Iterations | Euler | Symplectic Euler |
|---|---|---|
| 1 | 12.5000 | 12.5000 |
| 2 | 12.5038 | 12.5011 |
| 3 | 12.5074 | 12.5022 |
| ⋮ | ⋮ | ⋮ |
| 9999 | 22.1613 | 12.5596 |
| 10,000 | 22.1693 | 12.5627 |
| Iterations | RK4 | SRKN4 |
|---|---|---|
| 1 | 12.5000 | 12.5000 |
| 2 | 12.2044 | 12.3024 |
| 3 | 12.0098 | 12.1816 |
| ⋮ | ⋮ | ⋮ |
| 9999 | 3.3516 | 12.5290 |
| 10,000 | 3.3554 | 12.7716 |
| Iterations | RK4 | Symplectic Euler |
|---|---|---|
| 1 | 12.5000 | 12.5000 |
| 2 | 12.0852 | 12.5613 |
| 3 | 11.8489 | 23.2033 |
| ⋮ | ⋮ | ⋮ |
| 9999 | 8.1131 | |
| 10,000 | 18.6570 |
| Iterations | Symplectic Euler | SRKN4 |
|---|---|---|
| 1 | 12.5000 | 12.5000 |
| 2 | 12.5613 | 12.2914 |
| 3 | 23.2033 | 12.2471 |
| ⋮ | ⋮ | ⋮ |
| 9999 | 8.1131 | 12.7378 |
| 10,000 | 18.6570 | 12.5994 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Wang, Z.; Tian, H.; Liu, J. Symplectic Dynamics and Simultaneous Resonance Analysis of Memristor Circuit Based on Its van der Pol Oscillator. Symmetry 2022, 14, 1251. https://doi.org/10.3390/sym14061251
Yang B, Wang Z, Tian H, Liu J. Symplectic Dynamics and Simultaneous Resonance Analysis of Memristor Circuit Based on Its van der Pol Oscillator. Symmetry. 2022; 14(6):1251. https://doi.org/10.3390/sym14061251
Chicago/Turabian StyleYang, Baonan, Zhen Wang, Huaigu Tian, and Jindong Liu. 2022. "Symplectic Dynamics and Simultaneous Resonance Analysis of Memristor Circuit Based on Its van der Pol Oscillator" Symmetry 14, no. 6: 1251. https://doi.org/10.3390/sym14061251
APA StyleYang, B., Wang, Z., Tian, H., & Liu, J. (2022). Symplectic Dynamics and Simultaneous Resonance Analysis of Memristor Circuit Based on Its van der Pol Oscillator. Symmetry, 14(6), 1251. https://doi.org/10.3390/sym14061251