1. Introduction
Ruled surfaces have the most important positions and applications in the study of design problems in spatial mechanisms and physics, kinematics, and computer-aided design (CAD). Therefore, these surfaces are one of the most important topics of surface theory. Because of this position of ruled surfaces, many geometers and engineers have investigated and obtained many properties of the ruled surfaces. There exists a vast literature on the subject including several monographs (see for instance, [
1,
2,
3,
4,
5]). Furthermore, the differential geometry of ruled surfaces in Minkowski space
is much more complicated than the Euclidean case, since the Lorentzian metric is not a positive definite metric, the distance function
can be positive, negative, or zero, whereas the distance function in Euclidean space can only be positive. For instance, a continuously moving timelike line along a curve generates a timelike ruled surface. Turgut and Hacısalihoğlu have studied timelike ruled surfaces in Minkowski 3-space and they have given some properties of these surfaces [
6]. Timelike ruled surfaces with timelike rulings have been studied by Abdel-All et al. [
7]. Küçük has obtained some results on the developable timelike ruled surfaces in the same space [
8]. Furthermore, Uğurlu and Onder introduced Frenet frames and Frenet invariants of timelike ruled surfaces in Minkowski three-space [
9].
One of the main techniques for applying the singularity theory to Euclidean differential geometry is to consider the distance squared function and the height function on a submanifold of
[
10,
11,
12]. In this paper, we focus on the geometric analysis and the singularity of the spherical indicatrix and evolute of spacelike ruled surface with spacelike ruling. Finally, we provide an example to support our obtained results. There are some articles concerning singularity theory and submanifolds for several types of geometry. In the next work, we will combine the main results in this paper with the methods and techniques of singularity theory and submanifolds theory, etc., presented in [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22] to explore new results and theorems related with more symmetric properties about this topic.
2. Basic Concepts
To meet the requirements in the next sections, here, the basic elements of the theory of curves in the Minkowski 3-space
are briefly presented. There exists a vast literature on the subject, including several monographs (see for example [
1,
5]).
Let
be the three-dimensional Minkowski space, that is, the three-dimensional real vector space
with the following metric:
where
denotes the canonical coordinates in
. An arbitrary vector
of
is said to be spacelike if
0 or
=
, timelike if
0, and lightlike or null if
and
. A timelike or light-like vector in
is said to be causal. For
, the norm is defined by
then, the vector
is called a spacelike unit vector if
and a timelike unit vector if
. Similarly, a regular curve in
can locally be spacelike, timelike, or null (lightlike), if all of its velocity vectors are spacelike, timelike, or null (lightlike), respectively. For any two vectors
and
of
, the inner product is the real number
and the vector product is defined by the following.
The hyperbolic and Lorentzian (de Sitter space) unit spheres are as follows, respectively.
Definition 1. Let and in be two non-null vectors.
Assume that and are spacelike vectors, then we have the following:
If they span a spacelike plane, there is s a unique real number such that . This number is called the spacelike angle between the vectors and .
If they span a timelike plane. there is s a unique real number such that , where or according to or , respectively. This number is called the central angle between the vectors and .
Let us assume that and are timelike vectors, then there is a unique real number such that , where or according to and have different time-orientation or the same time-orientation, respectively. This number is called the Lorentzian timelike angle between vectors and .
Let us assume that is spacelike and is timelike, then there is a unique real number such that , where or according to or . This number is called the Lorentzian timelike angle between vectors and .
Let
be a unit speed non-null curve in
, and it has a spacelike or timelike rectifying plane. The
and
denote the natural curvature and torsion of
, respectively. Then,
is called
if
and
. Consider the Serret–Frenet frame
,
is associated with curve
, then the Serret–Frenet formulae are read as follows [
7,
8,
9]:
where
,
. Here, “prime” denotes the derivative with respect to the arc length parameter
s. Now, on the base of the different values of
,
, and
, we provide three detailed classifications for
:
is a timelike curve if ;
is called the first kind of spacelike curve ;
is called the second kind of spacelike curve .
Furthermore, if
is a spherical curve in
, by a translation in
if necessary, we may assume the following:
where
a is a constant. Without a loss of generality, we assume that
. Then, we define the following unit vector.
It is easy to see that
,
, and
form an orthonormal basis along curve
. Here, it is convenient to assume
,
1 and
. Hence, Equation (
4) yields the following.
Since
,
and
form an orthonormal basis along curve
, we call
,
the spherical Blaschke frame of the spherical curve
. By a direct computation, we conclude that there exists a function
satisfying the following.
Moreover, we call
the spherical (geodesic) curvature function of spherical curve
. The following can be shown.
It is obvious that
is the curvature axis or evolute of the spherical curve
. In fact, it is important to consider the relations between the spherical curvature
(s) and the curvature
(s), as well as the torsion
(s) of
. Therefore, from Equations (
3) and (
6), we have the following.
By computing the inner products with both sides of the above equation, respectively, we obtain the following.
Differentiating both sides of Equation (
10), we can directly generate the following.
Differentiating both sides of Equation (
9) and using Formulas (
5)–(
8), the following is the case.
Since the following is the case:
the above equation provides the following.
Similarly, by computing the inner products with both sides of Equation (
12), we obtain the following.
Then, Equatiions (
9), (
12) and (
13) result in the following.
Therefore, by combining Equations (
12) and (
14), the following relationships are generated.
On the other hand, let us consider a circle on
, which is described by the following equation:
where
c is a real constant, and
is a fixed spacelike unit vector that determines the circle’s center. This means that
is a great circle if
, and a small circle if
, respectively. Then, we have the following.
Proposition 1. Let be a unit speed timelike curve. Then, is a part of if and only if .
Proof. Suppose that
. By the Blaschke formula (
4), we have
as a constant unit vector. We consider a function
defined by
. Then, we have the following.
Therefore, f is identically equal to 0, and .
Conversely, assume that there exists
such that
. Then, function
f as above is identically equal to zero. It follows that
f. Thus, the following is the case.
Since
, we have
. the following is the case.
Since , we have . Then, , which contradicts the fact that . Thus, for any . □
Corollary 1. Let be a unit speed timelike curve. Then, if and only if is a part of .
Proof. For the first differential of
, we obtain the following.
Then,
if and only if
. From Equation (
14), we can figure out that
yields and that
and
are constant directly, which implies that
is a part of the small circle
for which its center is
. □
3. Spacelike Ruled Surface with Spacelike Ruling
A spacelike ruled surface in Minkowski 3-space
can be written as follows:
with the following being the case.
Here,
is a spacelike curve and
is a unit vector moving a long
. In this case, the curve
is the striction curve, and parameter
s is the arc length of spherical image or indicatrix
. Generally, we call such an expression the standard equation of the non-developable spacelike ruled surfaces with spacelike ruling in Minkowski 3-space
. Here, we will take notation
. Since
, it is reasonable to assume the following.
The functions , , and are called the curvature functions or construction parameters of the ruled surface. The geometrical meanings of these invariants are explained as follows: is the geodesic curvature of the spherical image curve ; describes the angle between the tangent of the striction curve and the ruling of the surface; and is the distribution parameter of the ruled surface M at the ruling .
3.1. Lorentzian Height Functions
In this subsection, we introduce a family of functions that is useful for the study of geometric invariants of timelike spherical curve
in
. For this purpose, similarly to the books in [
10,
12], the spacelike fixed unit vector
of
will be said to be a
evolute of the timelike curve
in
at
if for all
i such that
,
, but
. Here
denotes the i-th derivatives of
with respect to the arc length of
.
We now define a smooth function
by
. We call
a Lorentzian height function of
in
. We use the notation
for any fixed spacelike unit vector
of
. Then, we have the following proposition.
Proposition 2. Under the aforementioned notations, by direct calculation, the following holds:
By Proposition 2, we can discuss the contact of with circle :
There exist a spacelike vector such that if and only if . In this case, has at least 3-point contact with at .
The circle and curve in both have at least 4-point contact at if and only if and .
3.2. Unfoldings of Functions of One Variable
In this subsection, we will use the same technique on the singularity theory for families of smooth functions. Detailed descriptions are found in books [
10,
11]. Let
F:
be a smooth function, and
,
. Then,
F is called an r-parameter unfolding of
. If
for all 1
, and
, we say
has
-singularity at
. We also say
has
-singularity at
at if
for all 1
. Let
F be an r-parameter unfolding of
and
has
-singularity (1
at
, we define the
-jet of the partial derivative
at
to be
(without the constant term), for
. Then,
is called a
versal unfolding if and only if the
matrix of coefficients
has rank
. (This certainly requires
; thus, the smallest value of
r is
.)
We now state important sets about the unfoldings relative to the above notations. The singular set of
is the following set.
The bifurcation set
of
F is the following set [
11].
Then, similarly to [
11], we can state the following theorem.
Theorem 1. Let F: be an r-parameter unfolding of , which has the singularity at . Suppose that F is a versal unfolding. Then, the following is the case:
If , then is locally diffeomorphic to × ;
If , then is locally diffeomorphic to × , where is the ordinary cusp.
For the given curve
and
, the bifurcation set of
is given as follows.
Hence, we have the following fundamental proposition:
Proposition 3. For the unit speed timelike curve x on . If has the -singularity ( at , then is the versal unfolding of .
Proof. Let
b, with
. Then, we have the following.
Suppose that
and
. Then, we have the following.
Therefore, we have the following.
We also have the following:
and the following is the case.
Thus, the following is obtained.
(i) If
has the
-singularity at
, then
. Therefore, the
matrix of coefficients
is as follows.
Suppose that the rank of the matrix
A is zero; then, we have the following:
Since
, we have
so that we have the contradiction as follows.
This means that rank (, and is the (p) versal unfolding of at .
(ii) If
has
-singularity at
, then
, and by Proposition 1, we have the following:
where
, and
. Therefore, the
matrix of the coefficients
is as follows.
For the purpose, we also require the
matrix
B to be non-singular, which it always is. In fact, the determinate of this matrix at
is the following.
Since
x, we have
xx. Substituting these relations to the above equality, we have:
This means that rank . □
Proposition 4. Let x be a unit speed timelike curve on , we have the following:
(1) The spherical evolute of x is locally diffeomorphic to a constant spacelike vector if ;
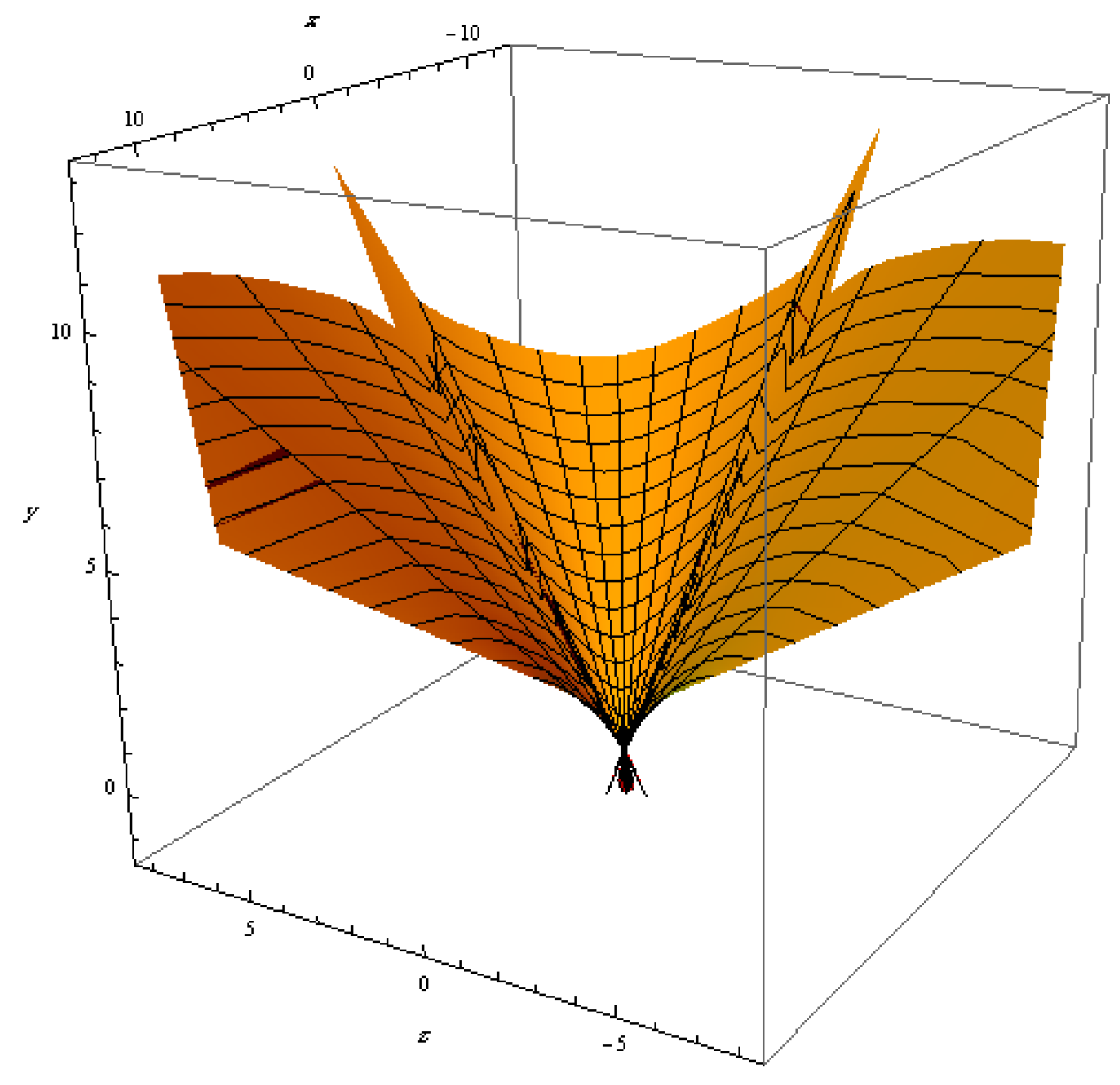
(2) The spherical evolute of x is locally diffeomorphic to the cusp at if and .
Proof. For the proof of assertion (1), from Equation (
22), we have the following.
Therefore, is locally diffeomorphic to a constant spacelike vector if . For assertion (2), from Proposition 2 and Theorem 1, the bifurcation set at is locally diffeomorphic to the ordinary cusp in if and □




{kind=link}
{kind=link}
{kind=link}