
Skorokhod Reflection Problem for Delayed Brownian Motion with Applications to Fractional Queues




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Reflected Brownian Motion
2.1. Skorokhod’s Reflection Problem
- (i)
- ;
- (ii)
- for any ;
- (iii)
- a is nondecreasing, and is supported on
- (i)
- For any and , it holds that
- (ii)
- For any and , it holds that
2.2. The Reflected Brownian Motion
- (i)
- For any , it holds that
- (ii)
- If , it holds that
- (iii)
- If , it holds that
- (iv)
- If , it holds that
2.3. Alternative Construction of the Reflected Brownian Motion
- (i)
- There exists a process such that, denoting by , it holds that
- (ii)
- Let and consider the unique strong solution of the stochastic differential equationThen, it holds that
3. The Reflected Brownian Motion Delayed by the Inverse Stable Subordinator
3.1. Inverse Stable Subordinators and Semi-Markov Processes
- (i)
- is a strictly increasing process with a.s. pure jump sample paths;
- (ii)
- is an increasing process with a.s. continuous sample paths;
- (iii)
- For any fixed , is an absolutely continuous random variable with PDF satisfyingwhere . This means that ;
- (iv)
- For any fixed , is an absolutely continuous random variable with PDF satisfying
- (v)
- For any fixed , it holds that and
3.2. The Reflected Brownian Motion Delayed by the Inverse Stable Subordinator
- (i)
- For any , it holds that
- (ii)
- It holds that
- (i)
- There exists a process such that, denoting by its running maximum, it holds thatalmost surely.
- (ii)
- Let and consider the unique strong solution of the time-changed stochastic differential equation (in the sense of [30])Then, it holds that
4. Heavy Traffic Approximation of the Fractional Queue
4.1. The Heavy Traffic Approximation of the Classical Queue
4.1.1. The Queueing Model
- service times and interarrival times are independent of each other;
- the jobs enter the system following a Poisson arrival process;
- service times are exponentially distributed.
4.1.2. The Heavy Traffic Approximation
4.2. The Heavy Traffic Approximation of the Fractional M/M/1 Queue
4.2.1. The Queueing Model
- 1.
- The variables are independent of each other;
- 2.
- For any , conditioned to the event ;
- 3.
- For any , conditioned to the event ;
- 4.
- For any , conditioned to the event ;
- 5.
- The variables are independent of each other;
- 6.
- For any , it holds that ;
- 7.
- The variables are independent of each other;
- 8.
- For any , it holds that ;
- 9.
- If , the sequences and are not independent of each other.
4.2.2. The Heavy Traffic Approximation
5. Simulating a with via CTRW
5.1. Simulation of the M/M/1
- The state array , which contains the states of the queue length process;
- The calendar array , which contains the times in which an event happens.
| Algorithm 1 Generation of the queue length process from the state and calendar arrays |
| procedureGenerateQueue ▹ Input: , |
| ▹ Output: |
| function (t) |
| ▹ Recall that the arrays start with 0 |
| if then |
| Error |
| else |
| while do |
| end while |
| end if |
| end function |
| end procedure |
| Algorithm 2 Simulation of a queue up to event |
| procedure SimulateArraysEvent ▹ Input: , , |
| ▹ Output: , |
| for do |
| Simulate uniform in |
| if then |
| else |
| end if |
| Simulate |
| Simulate |
| end for |
| end procedure |
| Algorithm 3 Simulation of a queue up to time |
| procedure SimulateArraysTime ▹ Input: , , |
| ▹ Output: , |
| while do |
| Simulate uniform in |
| if then |
| else |
| end if |
| Simulate |
| Simulate |
| end while |
| end procedure |
5.2. Simulation of the with
| Algorithm 4 Simulation of a for up to time and iteration |
| procedureSimulateDRBM ▹ Input: , , , |
| ▹ Output: |
| while do |
| Simulate uniform in |
| if then |
| else |
| end if |
| Simulate |
| Simulate |
| end while |
| GenerateDRBM() |
| end procedure |
| Algorithm 5 Generation of the DRBM process from the state and calendar arrays |
| procedureGenerateDRBM ▹ Input: , , |
| ▹ Output: |
| function (t) |
| ▹ Recall that the arrays start with 0 |
| if then |
| Error |
| else |
| while do |
| end while |
| end if |
| end function |
| end procedure |
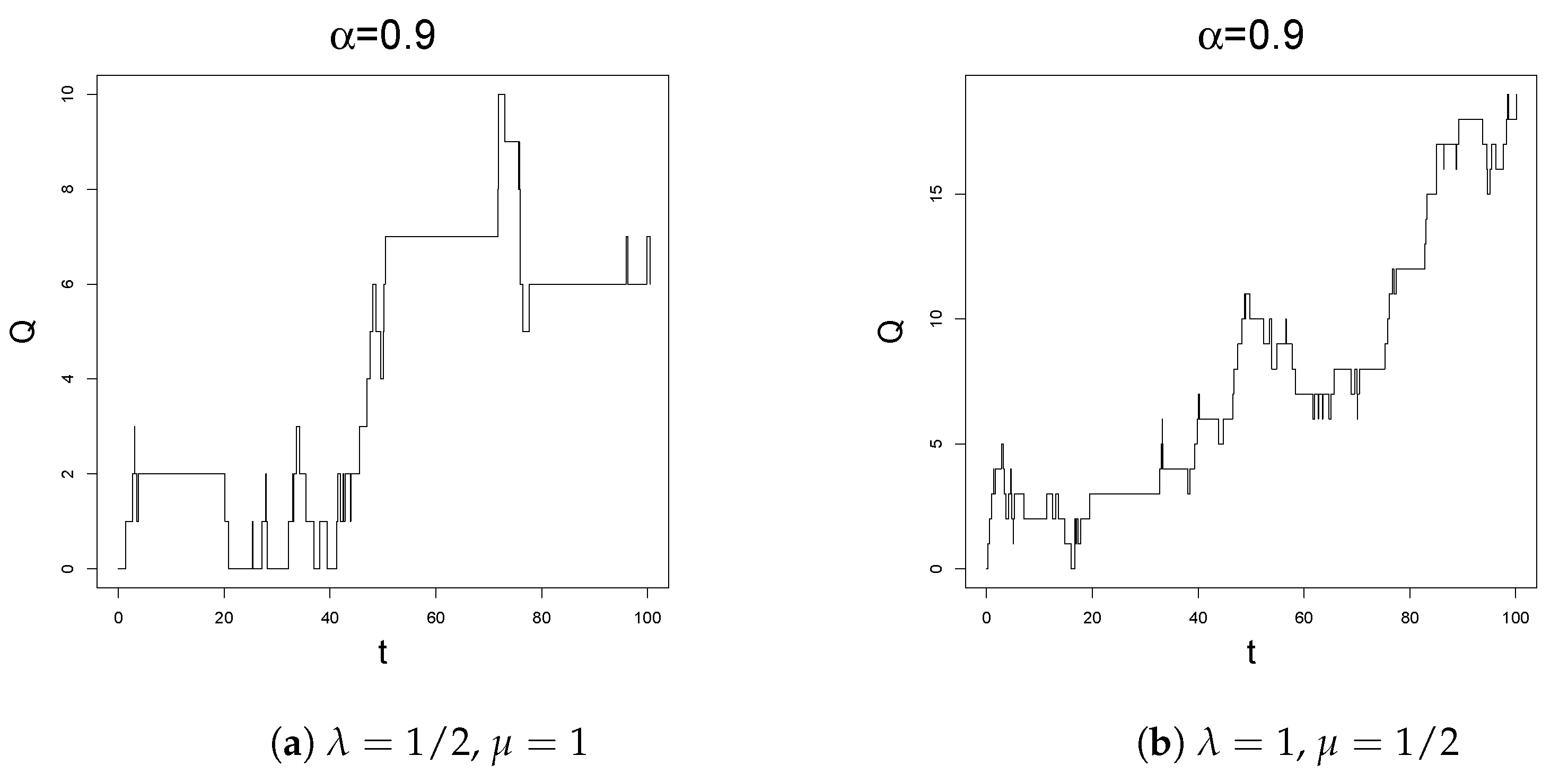
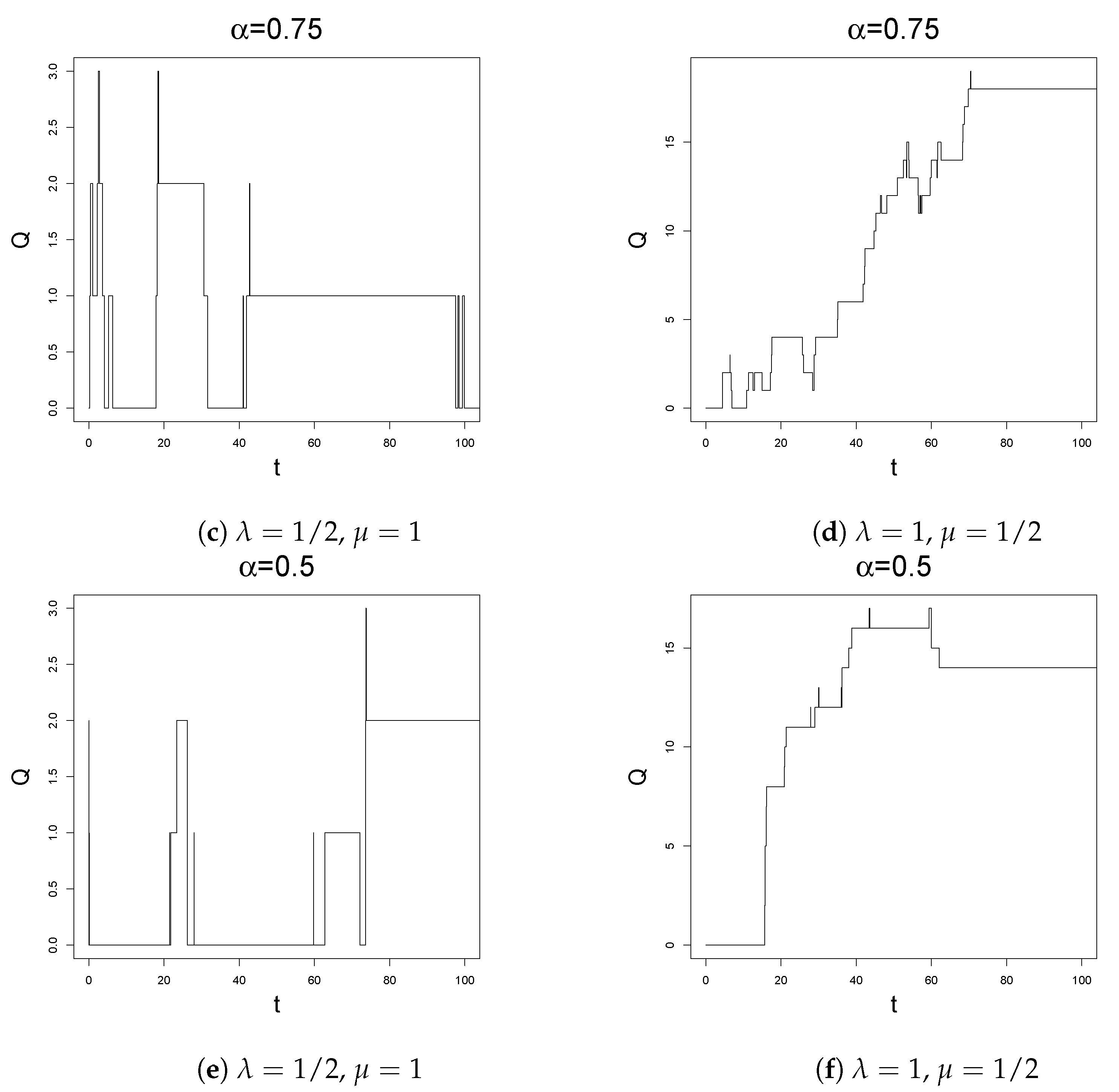
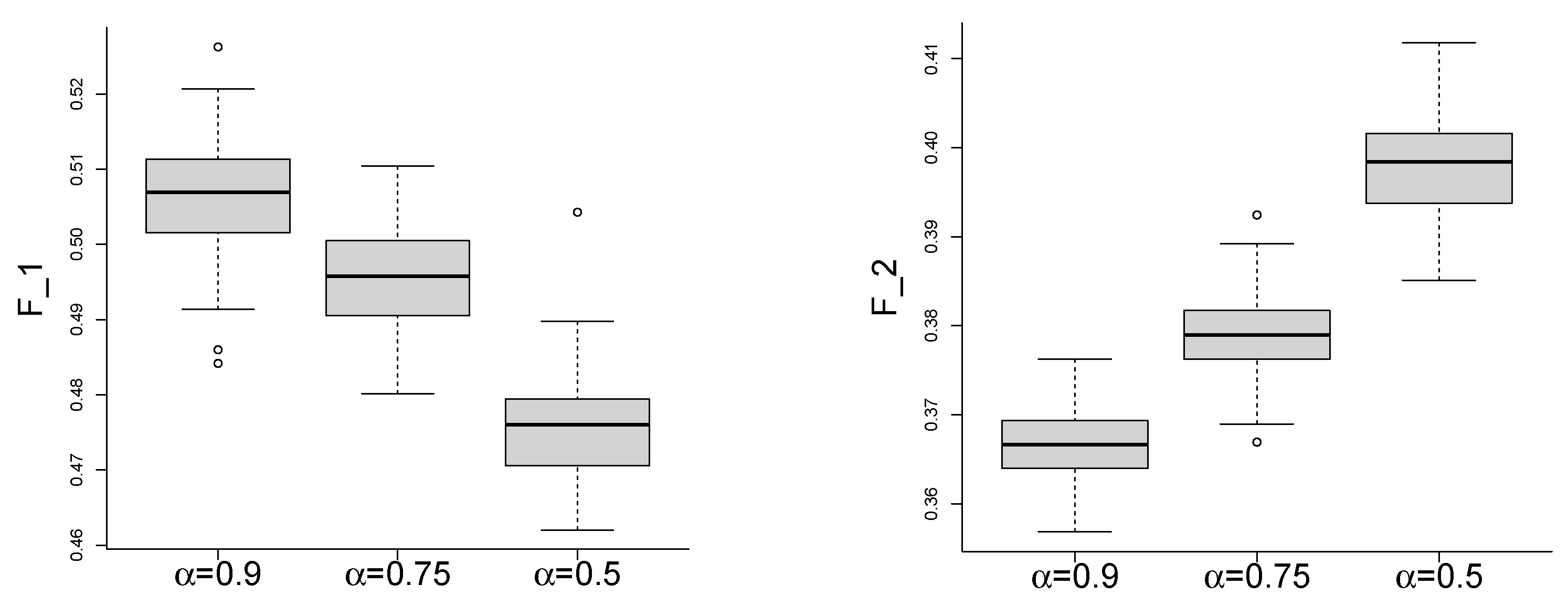
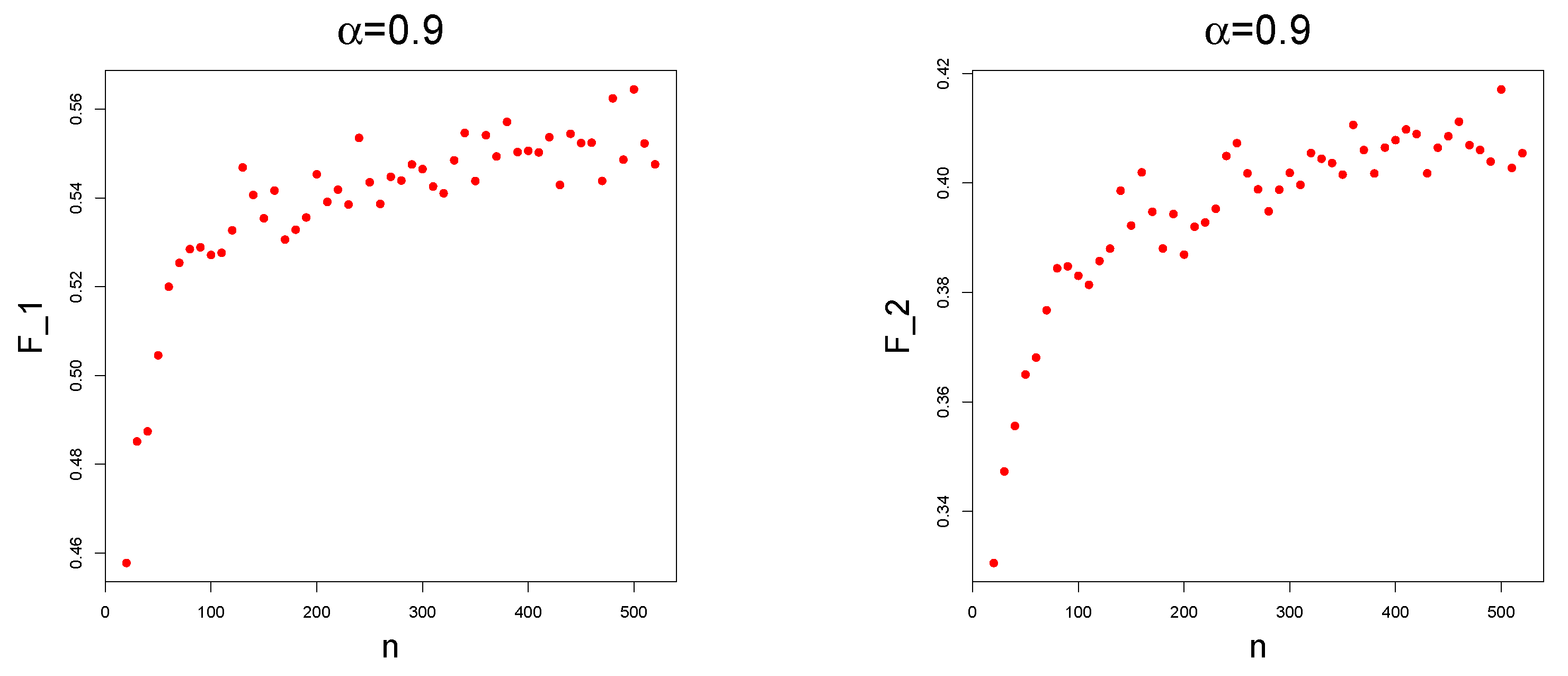
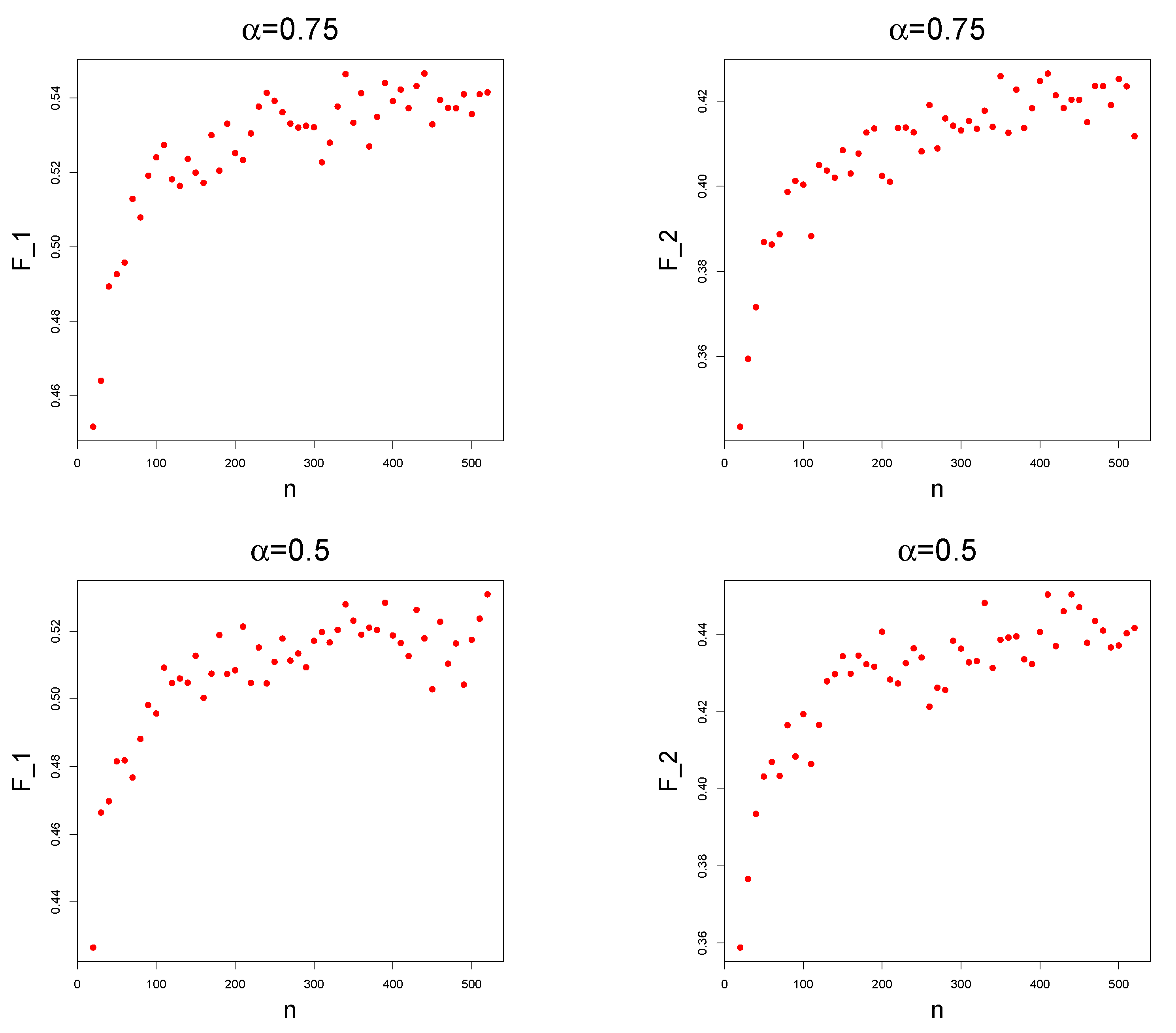
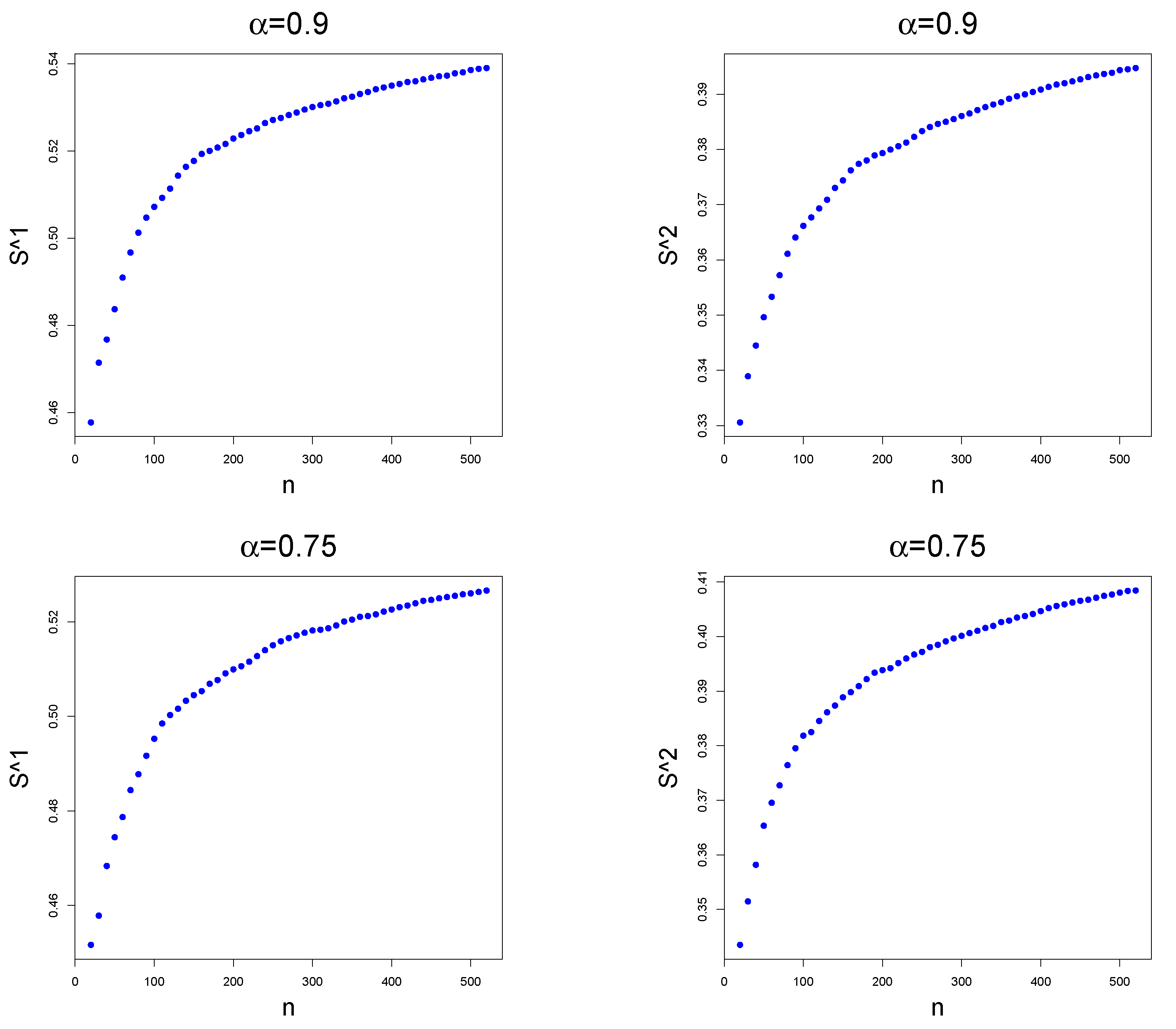
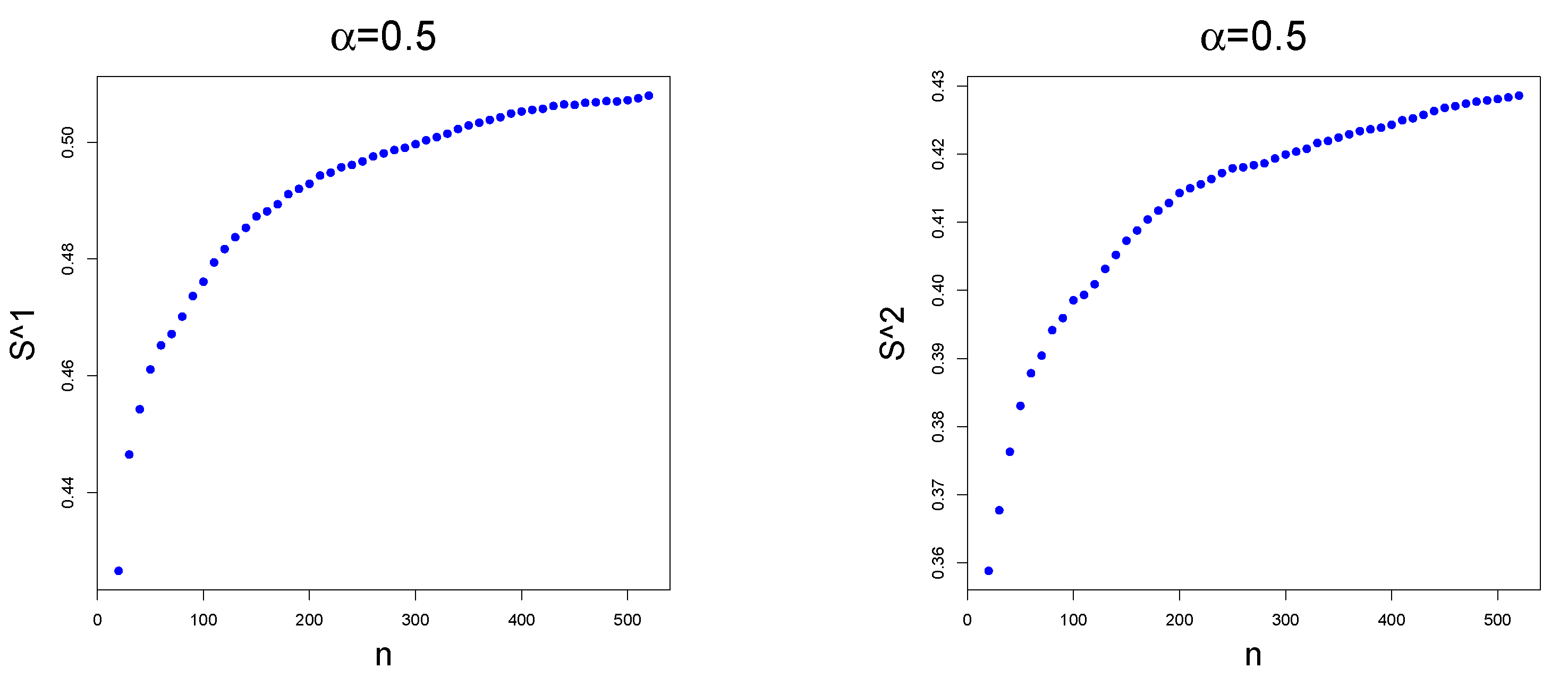
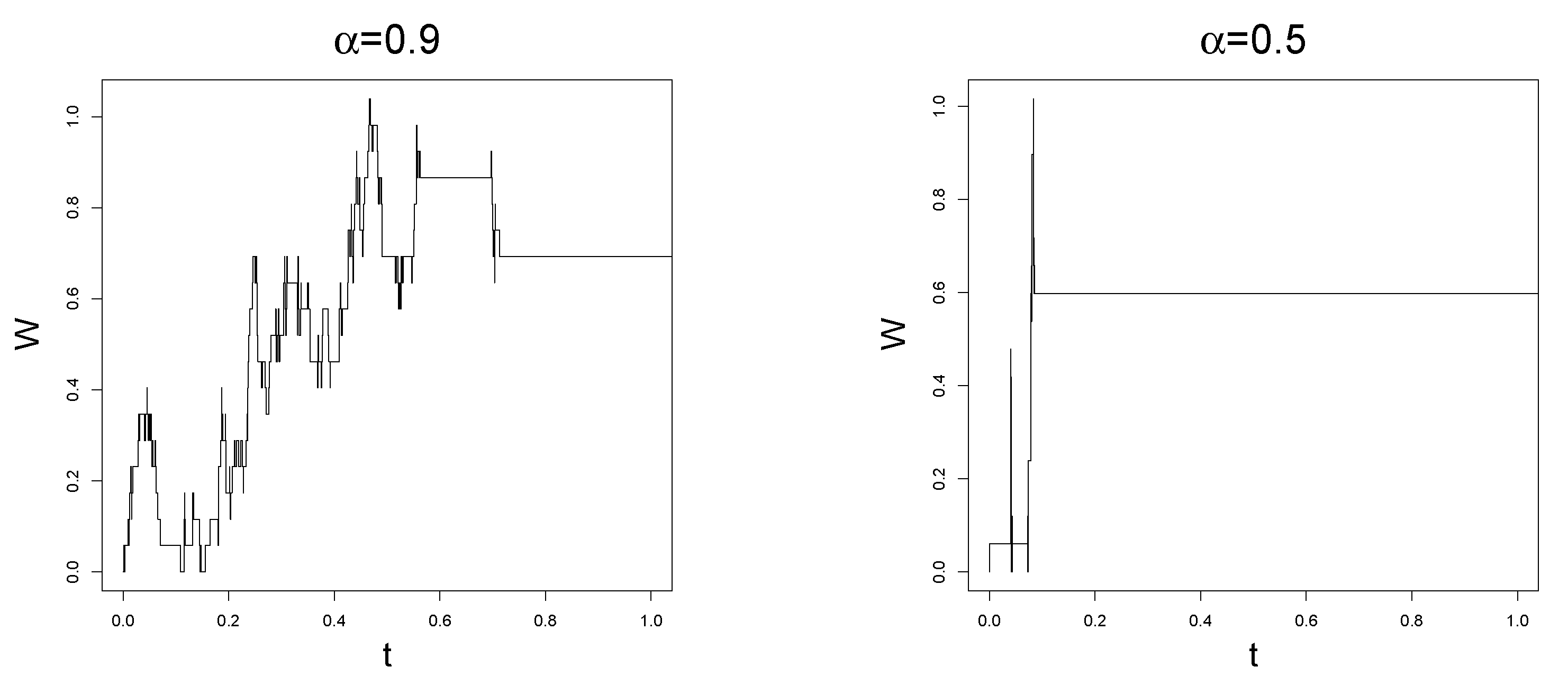
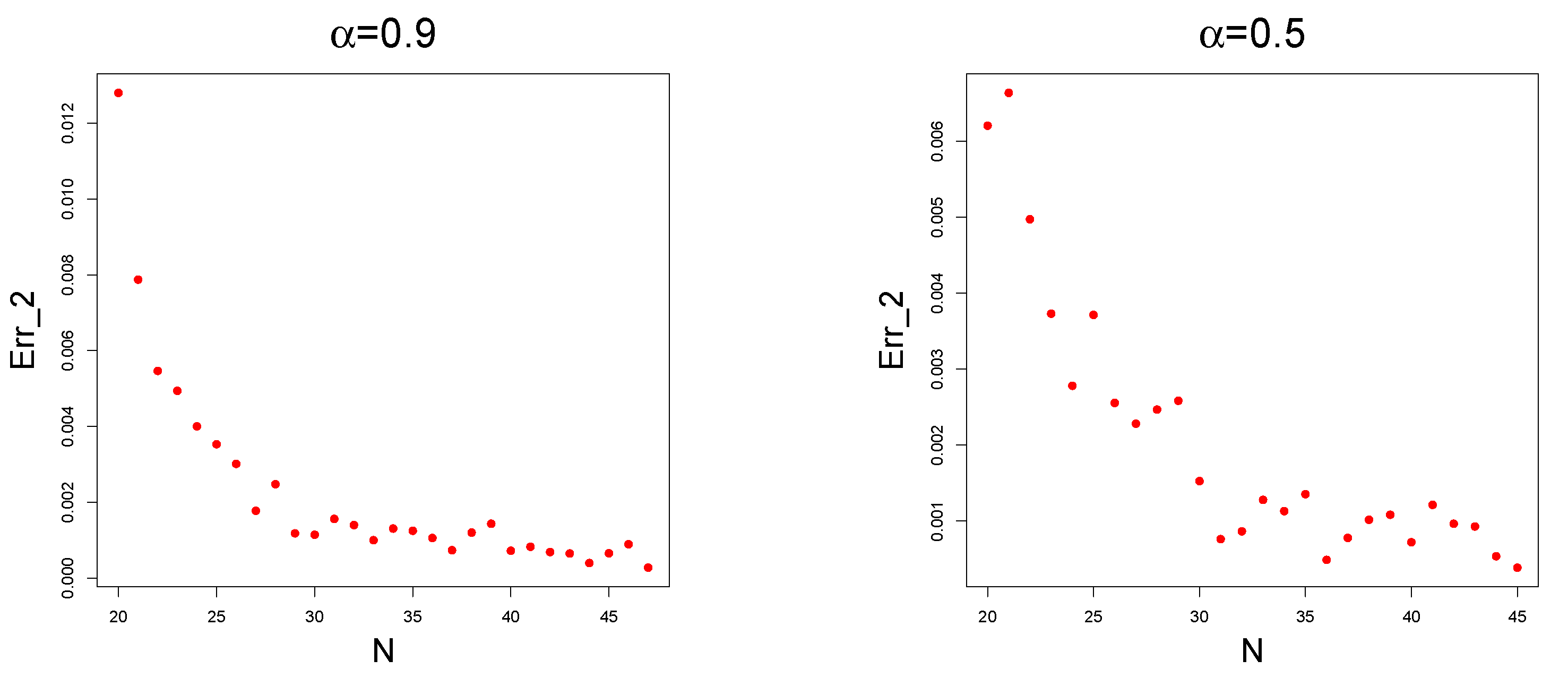
5.3. Numerical Results
- (i)
- It holds that ;
- (ii)
- There exist two constants such that for any .
| Algorithm 6 Simulation of trajectories of a for up to time with iteration and evaluation of the functional |
| procedure SimDRBMwFunc ▹ Input: , , , |
| ▹ Output: , , |
| for do |
| while do |
| Simulate uniform in |
| if then |
| else |
| end if |
| Simulate |
| Simulate |
| end while |
| end for |
| end procedure |
| Algorithm 7 Simulation of trajectories of a for up to time with tolerance and maximum number of iterations |
| procedure SimDRBMwTol ▹ Input: , , , |
| ▹ Output: trajectories of , |
| SimDRBMwFunc() |
| SimDRBMwFunc() |
| while and do |
| SimDRBMwFunc() |
| end while |
| for do |
| GenerateDRBM() |
| end for |
| end procedure |
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Erlang, A.K. The theory of probabilities and telephone conversations. Nyt. Tidsskr. Mat. Ser. B 1909, 20, 33–39. [Google Scholar]
- Helbing, D. A section-based queueing-theoretical traffic model for congestion and travel time analysis in networks. J. Phys. A Math. Gen. 2003, 36, L593. [Google Scholar] [CrossRef]
- Kleinrock, L. Queueing Systems: Computer Applications; John Wiley: Hoboken, NJ, USA, 1976. [Google Scholar]
- Cahoy, D.O.; Polito, F.; Phoha, V. Transient behavior of fractional queues and related processes. Methodol. Comput. Appl. Probab. 2015, 17, 739–759. [Google Scholar] [CrossRef]
- Schoutens, W. Stochastic Processes and Orthogonal Polynomials; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 146. [Google Scholar]
- Ross, S.M. Introduction to Probability Models; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Kleinrock, L. Queueing Systems: Theory; John Wiley: Hoboken, NJ, USA, 1975. [Google Scholar]
- Conolly, B.; Langaris, C. On a new formula for the transient state probabilities for M/M/1 queues and computational implications. J. Appl. Probab. 1993, 30, 237–246. [Google Scholar] [CrossRef]
- Parthasarathy, P. A transient solution to an M/M/1 queue: A simple approach. Adv. Appl. Probab. 1987, 19, 997–998. [Google Scholar] [CrossRef]
- Levy, P. Processus semi-markoviens. In Proceedings of the International Congress of Mathematicians, Amsterdam, The Netherlands, 2–9 September 1954. [Google Scholar]
- Orsingher, E.; Polito, F. Fractional pure birth processes. Bernoulli 2010, 16, 858–881. [Google Scholar] [CrossRef]
- Orsingher, E.; Polito, F. On a fractional linear birth–death process. Bernoulli 2011, 17, 114–137. [Google Scholar] [CrossRef]
- Leonenko, N.N.; Meerschaert, M.M.; Sikorskii, A. Fractional Pearson diffusions. J. Math. Anal. Appl. 2013, 403, 532–546. [Google Scholar] [CrossRef]
- Ascione, G.; Leonenko, N.; Pirozzi, E. Fractional immigration-death processes. J. Math. Anal. Appl. 2021, 495, 124768. [Google Scholar] [CrossRef]
- Laskin, N. Fractional Poisson process. Commun. Nonlinear Sci. Numer. Simul. 2003, 8, 201–213. [Google Scholar] [CrossRef]
- Meerschaert, M.; Nane, E.; Vellaisamy, P. The fractional Poisson process and the inverse stable subordinator. Electron. J. Probab. 2011, 16, 1600–1620. [Google Scholar] [CrossRef]
- Baeumer, B.; Meerschaert, M.M. Stochastic solutions for fractional Cauchy problems. Fract. Calc. Appl. Anal. 2001, 4, 481–500. [Google Scholar]
- Scalas, E.; Toaldo, B. Limit theorems for prices of options written on semi-Markov processes. Theory Probab. Math. Stat. 2021, 105, 3–33. [Google Scholar] [CrossRef]
- Ascione, G.; Cuomo, S. A sojourn-based approach to semi-Markov Reinforcement Learning. arXiv 2022, arXiv:2201.06827. [Google Scholar]
- Ascione, G.; Toaldo, B. A semi-Markov leaky integrate-and-fire model. Mathematics 2019, 7, 1022. [Google Scholar] [CrossRef]
- Ascione, G.; Leonenko, N.; Pirozzi, E. Fractional queues with catastrophes and their transient behaviour. Mathematics 2018, 6, 159. [Google Scholar] [CrossRef]
- De Oliveira Souza, M.; Rodriguez, P.M. On a fractional queueing model with catastrophes. Appl. Math. Comput. 2021, 410, 126468. [Google Scholar]
- Ascione, G.; Leonenko, N.; Pirozzi, E. Fractional Erlang queues. Stoch. Process. Their Appl. 2020, 130, 3249–3276. [Google Scholar] [CrossRef]
- Ascione, G.; Leonenko, N.; Pirozzi, E. On the Transient Behaviour of Fractional M/M/∞ Queues. In Nonlocal and Fractional Operators; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1–22. [Google Scholar]
- Whitt, W. Stochastic-Process Limits: An Introduction to Stochastic-Process Limits and their Application to Queues; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Skorokhod, A.V. Stochastic equations for diffusion processes in a bounded region. II. Theory Probab. Its Appl. 1962, 7, 3–23. [Google Scholar] [CrossRef]
- Magdziarz, M.; Schilling, R. Asymptotic properties of Brownian motion delayed by inverse subordinators. Proc. Am. Math. Soc. 2015, 143, 4485–4501. [Google Scholar] [CrossRef]
- Capitanelli, R.; D’Ovidio, M. Delayed and rushed motions through time change. Lat. Am. J. Probab. Math. Stat. 2020, 17, 183–204. [Google Scholar] [CrossRef]
- Graversen, S.E.; Shiryaev, A.N. An extension of P. Lévy’s distributional properties to the case of a Brownian motion with drift. Bernoulli 2000, 6, 615–620. [Google Scholar] [CrossRef]
- Kobayashi, K. Stochastic calculus for a time-changed semimartingale and the associated stochastic differential equations. J. Theor. Probab. 2011, 24, 789–820. [Google Scholar] [CrossRef]
- Asmussen, S.; Glynn, P.W. Stochastic Simulation: Algorithms and Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; Volume 57. [Google Scholar]
- Ambrosio, L.; Fusco, N.; Pallara, D. Functions of Bounded Variation and Free Discontinuity Problems; Courier Corporation: Washington, DC, USA, 2000. [Google Scholar]
- Dupuis, P.; Ramanan, K. Convex duality and the Skorokhod problem. I. Probab. Theory Relat. Fields 1999, 115, 153–195. [Google Scholar] [CrossRef]
- Harrison, J.M. Brownian Motion and Stochastic Flow Systems; Wiley: New York, NY, USA, 1985. [Google Scholar]
- Abate, J.; Whitt, W. Transient behavior of regulated Brownian motion, I: Starting at the origin. Adv. Appl. Probab. 1987, 19, 560–598. [Google Scholar] [CrossRef]
- Kinkladze, G. A note on the structure of processes the measure of which is absolutely continuous with respect to the Wiener process modulus measure. Stochastics: Int. J. Probab. Stoch. Process. 1982, 8, 39–44. [Google Scholar] [CrossRef]
- Revuz, D.; Yor, M. Continuous Martingales and Brownian Motion; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 293. [Google Scholar]
- Göttlich, S.; Lux, K.; Neuenkirch, A. The Euler scheme for stochastic differential equations with discontinuous drift coefficient: A numerical study of the convergence rate. Adv. Differ. Equ. 2019, 2019, 429. [Google Scholar] [CrossRef]
- Asmussen, S.; Glynn, P.; Pitman, J. Discretization error in simulation of one-dimensional reflecting Brownian motion. Ann. Appl. Probab. 1995, 5, 875–896. [Google Scholar] [CrossRef]
- Buonocore, A.; Nobile, A.G.; Pirozzi, E. Simulation of sample paths for Gauss-Markov processes in the presence of a reflecting boundary. Cogent Math. 2017, 4, 1354469. [Google Scholar] [CrossRef]
- Buonocore, A.; Nobile, A.G.; Pirozzi, E. Generating random variates from PDF of Gauss–Markov processes with a reflecting boundary. Comput. Stat. Data Anal. 2018, 118, 40–53. [Google Scholar] [CrossRef]
- Bertoin, J. Subordinators: Examples and Applications. In Lectures on Probability Theory and Statistics; Springer: Berlin/Heidelberg, Germany, 1999; pp. 1–91. [Google Scholar]
- Meerschaert, M.M.; Sikorskii, A. Stochastic Models for Fractional Calculus; de Gruyter: Berlin, Germany, 2019. [Google Scholar]
- Meerschaert, M.M.; Straka, P. Inverse stable subordinators. Math. Model. Nat. Phenom. 2013, 8, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Arendt, W.; Batty, C.J.; Hieber, M.; Neubrander, F. Vector-Valued Laplace Transforms and Cauchy Problems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Mikusiński, J. On the function whose Laplace-transform is e-sα. Stud. Math. 1959, 2, 191–198. [Google Scholar] [CrossRef]
- Saa, A.; Venegeroles, R. Alternative numerical computation of one-sided Lévy and Mittag-Leffler distributions. Phys. Rev. E 2011, 84, 026702. [Google Scholar] [CrossRef] [PubMed]
- Penson, K.; Górska, K. Exact and explicit probability densities for one-sided Lévy stable distributions. Phys. Rev. Lett. 2010, 105, 210604. [Google Scholar] [CrossRef]
- Ascione, G.; Patie, P.; Toaldo, B. Non-local heat equation with moving boundary and curve-crossing of delayed Brownian motion. 2022; in preparation. [Google Scholar]
- Leonenko, N.; Pirozzi, E. First passage times for some classes of fractional time-changed diffusions. Stoch. Anal. Appl. 2021, 1–29. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Straka, P. Semi-Markov approach to continuous time random walk limit processes. Ann. Probab. 2014, 42, 1699–1723. [Google Scholar] [CrossRef]
- Çinlar, E. Markov additive processes. II. Z. Wahrscheinlichkeitstheorie Verwandte Geb. 1972, 24, 95–121. [Google Scholar] [CrossRef]
- Kaspi, H.; Maisonneuve, B. Regenerative systems on the real line. Ann. Probab. 1988, 16, 1306–1332. [Google Scholar] [CrossRef]
- Billingsley, P. Convergence of Probability Measures; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chambers, J.M.; Mallows, C.L.; Stuck, B. A method for simulating stable random variables. J. Am. Stat. Assoc. 1976, 71, 340–344. [Google Scholar] [CrossRef]
- Borovkov, A. Some limit theorems in the theory of mass service. Theory Probab. Its Appl. 1964, 9, 550–565. [Google Scholar] [CrossRef]
- Iglehart, D.L.; Whitt, W. Multiple channel queues in heavy traffic. I. Adv. Appl. Probab. 1970, 2, 150–177. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Mainardi, F.; Gorenflo, R.; Scalas, E. A fractional generalization of the Poisson processes. Vietnam J. Math. 2004, 32, 53–64. [Google Scholar]
- Mainardi, F.; Gorenflo, R.; Vivoli, A. Renewal processes of Mittag-Leffler and Wright type. Fract. Calc. Appl. Anal. 2005, 8, 7–38. [Google Scholar]
- Bingham, N.H. Limit theorems for occupation times of Markov processes. Z. Wahrscheinlichkeitstheorie Verwandte Geb. 1971, 17, 1–22. [Google Scholar] [CrossRef]
- Peng, J.; Li, K. A note on property of the Mittag-Leffler function. J. Math. Anal. Appl. 2010, 370, 635–638. [Google Scholar] [CrossRef]
- Gillespie, D.T. A general method for numerically simulating the stochastic time evolution of coupled chemical reactions. J. Comput. Phys. 1976, 22, 403–434. [Google Scholar] [CrossRef]
- Nolan, J.P. Numerical calculation of stable densities and distribution functions. Commun. Statistics Stoch. Model. 1997, 13, 759–774. [Google Scholar] [CrossRef]
- Abate, J.; Whitt, W. Transient behavior of the M/M/l queue: Starting at the origin. Queueing Syst. 1987, 2, 41–65. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ascione, G.; Leonenko, N.; Pirozzi, E. Skorokhod Reflection Problem for Delayed Brownian Motion with Applications to Fractional Queues. Symmetry 2022, 14, 615. https://doi.org/10.3390/sym14030615
Ascione G, Leonenko N, Pirozzi E. Skorokhod Reflection Problem for Delayed Brownian Motion with Applications to Fractional Queues. Symmetry. 2022; 14(3):615. https://doi.org/10.3390/sym14030615
Chicago/Turabian StyleAscione, Giacomo, Nikolai Leonenko, and Enrica Pirozzi. 2022. "Skorokhod Reflection Problem for Delayed Brownian Motion with Applications to Fractional Queues" Symmetry 14, no. 3: 615. https://doi.org/10.3390/sym14030615
APA StyleAscione, G., Leonenko, N., & Pirozzi, E. (2022). Skorokhod Reflection Problem for Delayed Brownian Motion with Applications to Fractional Queues. Symmetry, 14(3), 615. https://doi.org/10.3390/sym14030615