Abstract
This paper considers the observer-based fault estimation and fault-tolerant control for descriptor Markovian jump systems (DMJSs). The goal of this paper is to estimate the actuator faults, sensor faults, and the state simultaneously, and then design a controller based on the estimation to stabilize the DMJS. Firstly, the state, actuator faults, and sensor faults are extended to new state variables to obtain an augmented system. Then, a lower triangular factor-based estimation observer (LTFEO) is proposed to estimate the state and multiple faults and to eliminate the influence of sensor faults. It is proved that the descriptor error system is derivative input-to-state stable (DISS) with respect to the derivative of the faults. Furthermore, based on the fault estimation, a fault-tolerant control scheme is proposed to guarantee the overall closed-loop system DISS. Finally, a numerical example is given to verify the effectiveness of the proposed estimation scheme and control strategy.
1. Introduction
Descriptor systems, also called generalized state-space systems, differential-algebraic systems, or singular systems, have been widely used due to their outstanding abilities in modeling practical engineering such as electrical circuits [1,2], biological systems [3], and mechanical systems [4,5]. Descriptor systems theory is an essential branch of modern control theory [1,6]. Meanwhile, Markovian jump systems (MJSs) are a special kind of multimodal stochastic hybrid system, and the modes can switch from one to another at different times [7,8]. Descriptor Markovian jump systems (DMJSs) can be modeled when descriptor systems experience sudden changes such as environmental mutation, component failures, and changes in subsystem interconnection. Accordingly, scholars have paid considerable attention to the analysis and study of the stability, robustness, and fault estimation on DMJSs. Numerous substantive results have been proposed in the past twenty years [9,10,11,12,13]. A super-twisting algorithm was developed to solve the integral sliding mode control problem for T-S fuzzy DMJSs in [9,10], which investigated the issue of passivity analysis for the DMJSs using delayed partitioning. The robust stabilization problem of uncertain switching DMJSs was studied in [11,12], which considered the stochastic stabilization of a class of DMJSs with partly unknown transition rates. The robust control problem was investigated for DMJSs in [13], where the stochastic stability conditions of DMJSs were proposed.
In another area of research, the control systems are not completely reliable because faults may inevitably occur in normal system operations. It is usually caused by the aging of sensors and actuators, the wear and tear of internal components, and the abrupt changes in the working environment. These faults can dramatically affect the performance of the systems and even lead to significant accidents. Hence, it is of great significance to diagnose and estimate the faults from a stable system operation. Fault-tolerant control (FTC) is a control technique that can ensure the stable operation of the overall system in case of faults within the system [14,15]. Therefore, as a significant method of FTC, fault estimation has been widely studied [16,17]. There are plenty of methods and techniques that have been proposed for observer-based estimation, including the robust observer (RO) approach [18], adaptive observer (AO) approach [19,20], and others [21,22,23]. In the existing fault estimation approaches, AO improves the estimation accuracy by considering adaptive law compared with the RO. In [19], the authors proposed an adaptive polytopic observer for linear parameter varying descriptor systems, where actuator faults were estimated by an adaptive algorithm. In [23], a more comprehensive form of estimation observer without sensor faults was proposed based on the lower triangular factor. However, faults on the measurement probably influence the closed-loop system performance, and thus it could not be neglected. As we all know, actuator faults and sensor faults often unavoidably appear in practical control systems simultaneously. The adverse effects caused by multiple faults need to be fully considered in the design process. Although the existing works have solved the issues of fault estimation and FTC, which focus on either actuator faults [15,23,24,25,26,27] or sensor faults [21,28]. So far, few related works have considered the case of the actuator faults and sensor faults appearing simultaneously. This case often occurs in practice, which is what motivated us to conduct this study.
In this paper, we study the fault estimation and FTC design problems for DMJS. Through appropriate design, the DMJS considered in this paper can achieve DISS property with respect to the derivative of the faults. Compared to existing literature, the main contributions of the paper are as follows:
(i) In contrast to the literature [15,21,23,24,25,26,27,28], in which either actuator faults or sensor faults were considered, this paper considers the case of the actuator faults, and sensor faults appear simultaneously. A lower triangular factor-based estimation observer (LTFEO) is designed to estimate the state, actuator faults, and sensor faults. This paper extends the LTFEO of non-singular fuzzy systems in [23] to DMJS. Based on the estimation, the influence of sensor faults is eliminated in the LTFEO such that the estimation of the state can be used in FTC design.
(ii) The designed LTFEO guarantees that the descriptor error system is derivative input-to-state stable (DISS) with respect to the derivative of the faults, which means the state of the descriptor error system asymptotically converges within the region defined by , where is the fault vector and is the gain function. In addition, the state converges to zero when the derivative of the faults converges to zero. It is different from the existing results in [22,23]. The current literature [22,23] shows that the state of the error system is asymptotically stable only when the derivative of the faults is equal to zero.
The remainder of this paper is organized as follows: In Section 2, preliminaries and problem formulation are given. In Section 3, an LTFEO is proposed to simultaneously estimate the state, actuator faults, and sensor faults. Then, an observer-based FTC strategy is given. In Section 4, a numerical example is exhibited to verify the effectiveness of the proposed estimation method and control strategy. Section 5 summarizes the whole work of the paper.
Notations: represents the Euclidean norm. is the complex plane. stands for the essential supremum of the truncation of z on , that is . and are the maximum and minimum eigenvalues of , respectively. diag denotes the diagonal matrix. A function is said to be a class function if it is nondecreasing, continuous, and ; it is said to be a class function if it is a class function and satisfies as . A function is said to be a class function if for each , function is a class function, and for each , function is decreasing and satisfies . ℓ denotes the weak infinitesimal operator. * denotes the symmetric parts of the symmetric matrices. denotes the kth derivative of function f.
2. Problem Formulation and Preliminaries
Consider the following DMJS with multiple faults:
where is a singular matrix with , is the state, is the control input, and is the measurement output. and are actuator and sensor faults, respectively. , , , , are real constant matrices with appropriate dimensions, is a right-continuous Markov chain taking values from a finite set with a generator , referred to as the transition rate matrix:
where and , is the switching rate from i to j and satisfies , with and for .
For simplicity, the matrices , , , , and are represented by , , , , and , respectively. Now, System (1) can be rewritten as follows:
The following definitions, assumptions, and lemmas are given before presenting our main result:
Definition 1.
- regular—if there is a constant scalar s such thator equivalently, the polynomial is not identically zero for .
- impulse free—if , .
Definition 2.
Consider the following n-dimensional descriptor system:
where is the locally Lipschitz function. System (3) is said to be input-to-state stable (ISS) if for any initial state and any measurable, locally essentially bounded input u, there exist and such that the solution satisfies the following equation:
Definition 3.
In [29], System (3) is said to be kth derivative input-to-state stable (ISS) if for any initial state and any measurable, locally essentially bounded input u, there exist and some functions , ,…, , such that the solution satisfies the following equation:
Remark 1.
We say that System (3) is DISS when . The kth derivative input-to-state stability reduces to input-to-state stability when . Similar to the ISS property, the kth derivative input-to-state stability becomes a globally asymptotic stability when u is absent. The state vector x converges to zero when converges to zero. The above properties correspond to a uniformly bounded-input bounded-state (UBIBS) property and a converging-input converging-state (CICS) property for nonlinear systems.
Assumption 1.
Assumption 2.
The derivative of actuator faults and sensor faults is locally essentially bounded.
Remark 2.
The fault estimation problems are discussed in [22,23]. The authors assume that the derivative of the faults is bounded by a known constant. The error system is globally asymptotically stable only when the derivative of faults is identically equal to zero. Different from the existing literature, the designed LTFEO in this paper can estimate the unknown time-varying faults. The error system asymptotically converges to zero when the derivative of the faults converges to zero.
In the following, a lemma is given to present a sufficient condition of DISS.
Lemma 1.
In [29], descriptor System (3) is considered. If there exist matrix P such that , and positive scalar κ and such that
The following lemma is used in the proof of our main results.
Lemma 2.
In [30], for any real matrices M, N, and Θ with an appropriate dimension, if Θ satisfies , then the following inequality holds:
for any .
In what follows, an augmented system is constructed, whose state is composed of the original system state, actuator faults, and sensor faults.
First, we denote with , and correspondingly we have , . Then, the original System (2) is equivalently transformed into the following system:
We make the following lower triangular factor-based linear transformation on system (10):
where , and J is an arbitrary constant matrix.
Subsequently, an augmented system is described as follows:
where
Assumption 3.
Remark 3.
It should be noted that is a lower triangular matrix. Therefore, the observer with the factor is called the LTFEO. It is shown in [23]that LTFEO is more comprehensive, which can be reduced to the RO in [31,32]and estimate the faults quickly when and . In addition, the LTFEO can be reduced to the intermediate estimator in [22]when and the accuracy of fault estimation is improved, where ω is a positive scalar.
Remark 4.
System (10) has been converted to the augmented DMJS (12), whose state consists of the original System (2) state, actuator faults, and sensor faults. Assumption 3 means that an observer can be designed for System (12) such that the state of the original System (2), actuator faults, and sensor faults can be estimated simultaneously.
3. Main Results
In this section, we propose a novel LTFEO to achieve a simultaneous estimation of , , and for System (2). Then, an effective FTC strategy is designed to stabilize the DMJS (2). The obtained overall closed-loop system is DISS with respect to the derivative of the faults, which means that the state flows in a large range if the derivative of the faults is large, and the state converges to zero if the derivative of the fault converges to zero.
3.1. Lower Triangular Factor-Based Estimation Observer Design
Inspired by Huang et al. [23], an improved observer for DMJS is proposed to estimate the state and faults. The observer is in the form of:
where is the estimation of the state of System (12), is the observer output, and are the observer gain matrices to be designed.
Subsequently, the state estimation and fault estimation can also be derived as follows:
where
Denote
Remark 5.
The estimation of the state may not be accurate because of the appearance of the sensor faults . Thanks to , the influence of can be eliminated in the designed LTFEO (13).
Remark 6.
In the following, we present the main result.
where
Theorem 1.
The error System (17) is DISS if for each , given a positive scalar , there exists a set of nonsingular matrices such that the following linear matrix inequalities hold:
Hence, by defining , the observer gains can be solved.
Proof of Theorem 1
First of all, we prove that the system is regular and impulse-free for each . From (19), we know the following:
as , there exist non-singular matrices and such that . Moreover, we denote:
Since , it is not difficult to prove , and . Then, pre- and post-multiplying (20) by and , respectively, it follows that:
where ☆ are the matrix blocks we do not need to know. Then, we can easily obtain so that is nonsingular, which implies that the system is regular and impulse-free.
Now, we are ready to prove that the system is DISS. Consider the following Lyapunov candidate functions:
Let ℓ be the weak infinitesimal operator [34] of along the trajectory of the system described in (12), then for each , it can be shown that:
Based on Lemma 2, the following inequalities always hold:
Furthermore, from (22), we have the following equation:
It is not hard to be found that if , we have
where
3.2. Fault-Tolerant Control
In this section, a novel FTC scheme is proposed to eliminate the influence of actuator faults, thereby stabilizing the closed-loop system.
Assumption 4.
, .
Lemma 3.
In [35], for any Penrose–Moore inverse of the matrix , and any that satisfies Assumption 4, we have .
An observer-based fault-tolerant controller is designed as follows:
where are the controller gains to be designed. and are defined in (14) and (15).
Substituting controller (29) into the system described in (2), we obtain the overall closed-loop system as:
where
Next, we will propose an important theorem, which can guarantee that the overall closed-loop System (30) is DISS.
where , is defined in (30).
Theorem 2.
The closed-loop System (30) is DISS if for each , given scalars and , there exist nonsingular and appropriately dimensioned matrices , matrices , such that the following matrix inequalities hold:
Proof of Theorem 2
Choose the Lyapunov function as:
The weak infinitesimal generator of along the trajectory of System (30) is derived as follows:
On the other hand, by the Schur complement, if (32) holds, it follows that:
It further follows that:
Therefore, the closed-loop System (30) is ISS with respect to . Theorem 1 shows that the descriptor error System (17) is DISS with respect to the derivative of the faults. By the proof in [36], it can be easy to verify that a cascaded interconnected system composed of an ISS subsystem followed by a DISS subsystem is still DISS. Therefore, by (36) and (27), it means that the state of the overall closed-loop System (30) is also DISS with respect to the derivative of the faults. This completes the proof. □
Since (32) is a nonlinear matrix inequality, it needs to be linearized by the following theorem.
with .
Theorem 3.
The state of the overall closed-loop System (30) is DISS if for each , given scalars and , there exist matrices , and , such that the following linear matrix inequalities hold:
Proof.
Set , and . If linear matrix inequalities (37) and (38) hold, we have the following equation:
where is defined in Theorem 2. Denote , then, we can further deduce that , that is, matrix inequality (32) holds. According to Theorem 2, the state of the overall closed-loop System (30) is DISS. This completes the proof. □
4. Simulation Examples
In this section, a numerical example is given to verify the effectiveness of the proposed method. Consider a DMJS subject to actuator faults and sensor faults in the form of (1) with two modes. The parameters are as follows:
Mode 1:
Mode 2:
The transition rate matrix is given as follows:
and other parameters are set as follows:
In this example, the actuator fault and sensor fault have the following forms:
Next, the estimation observer and controller gains can be obtained by solving the linear matrix inequalities in Theorems 1 and 3 using the LMI toolbox in MATLAB. In addition, the differential equation is solved by Simulink module in MATLAB.
The initial value of the system is
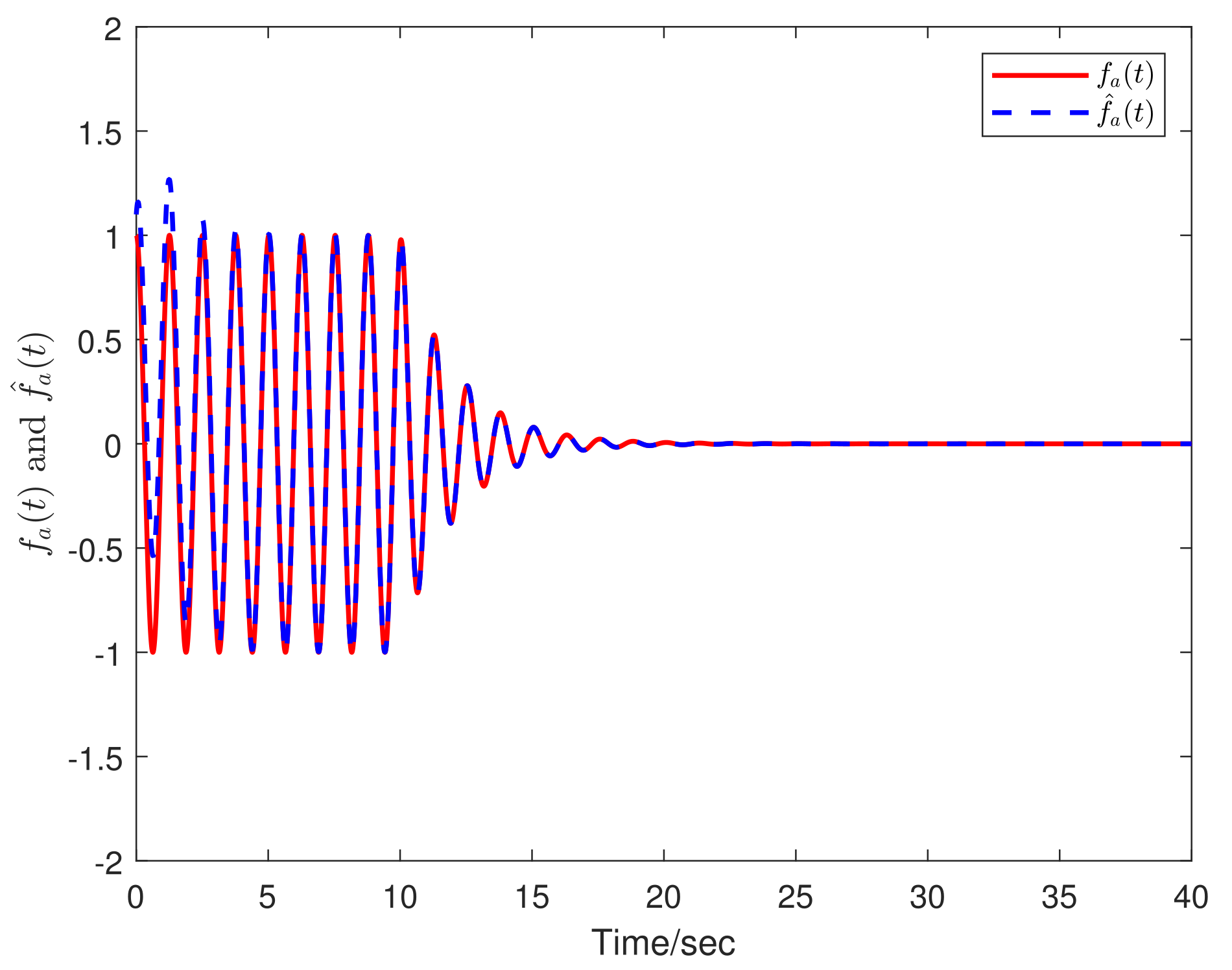
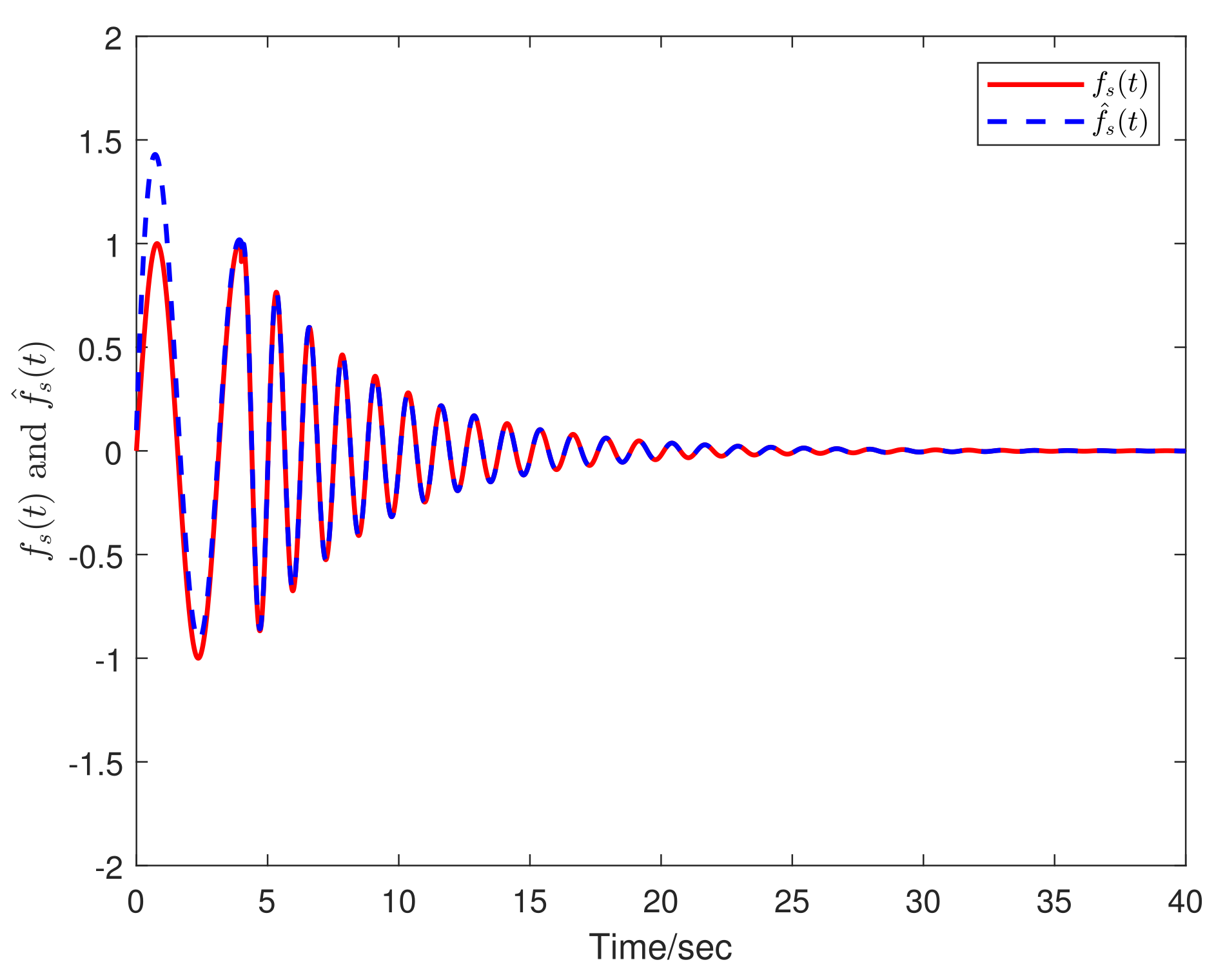
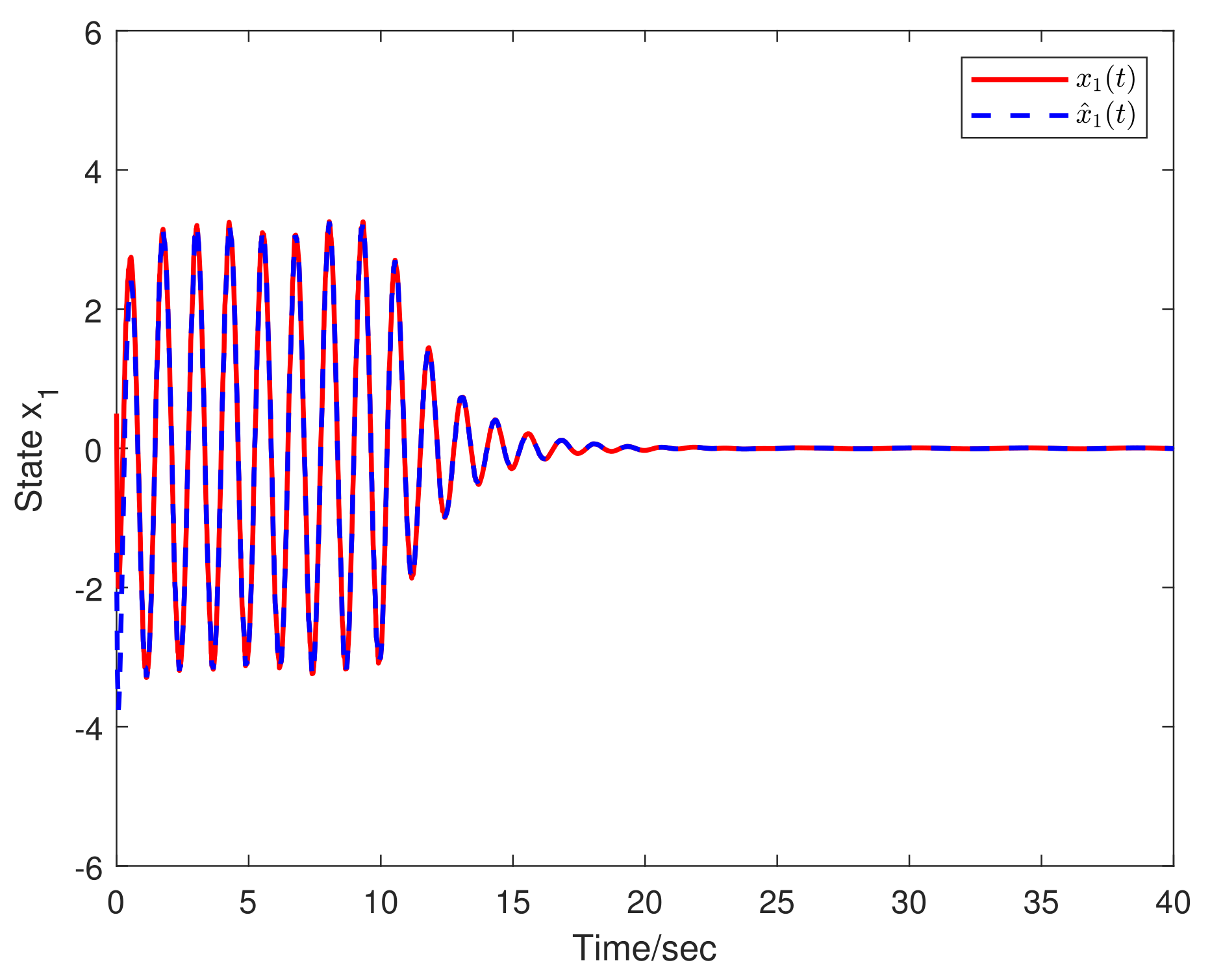
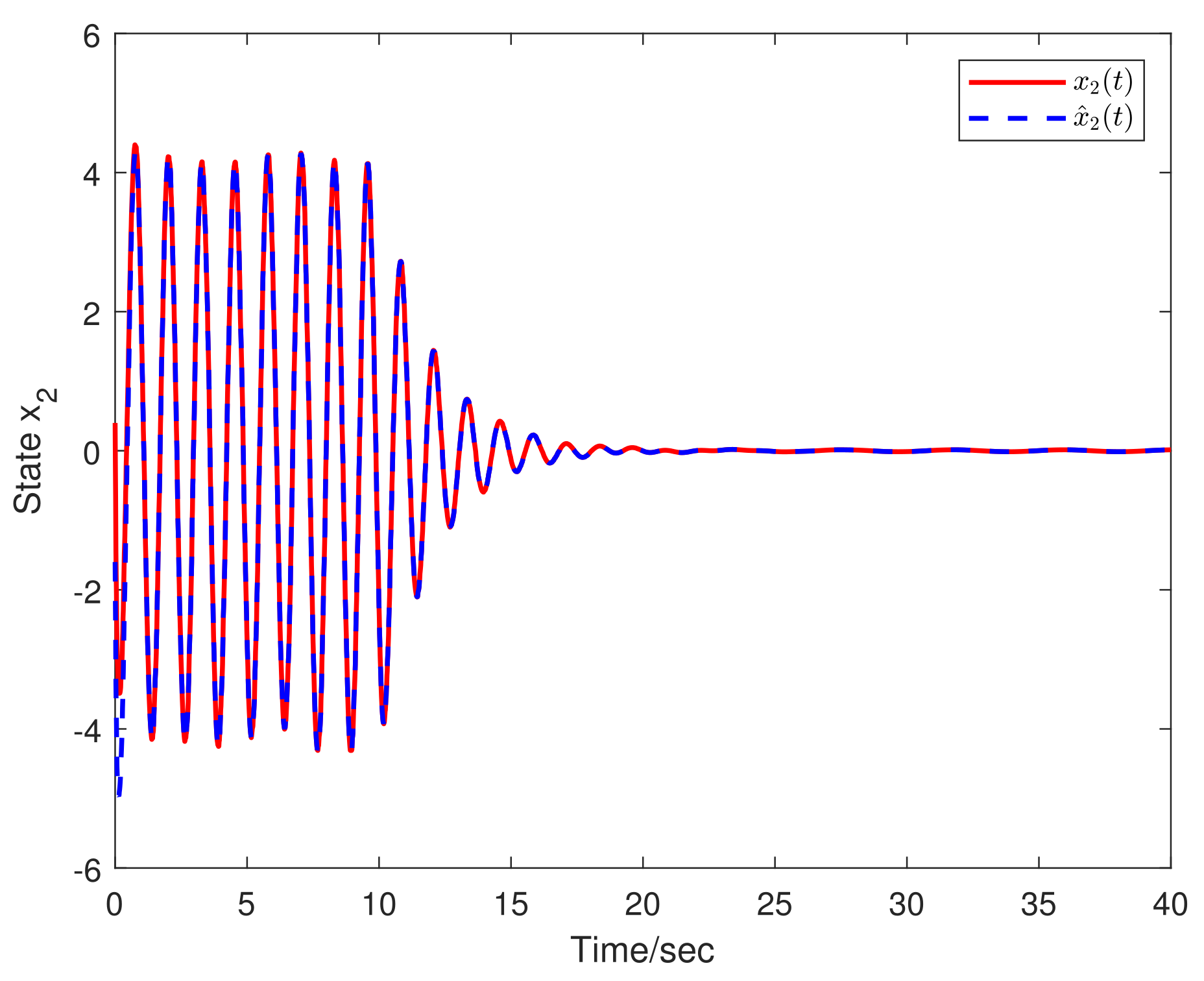
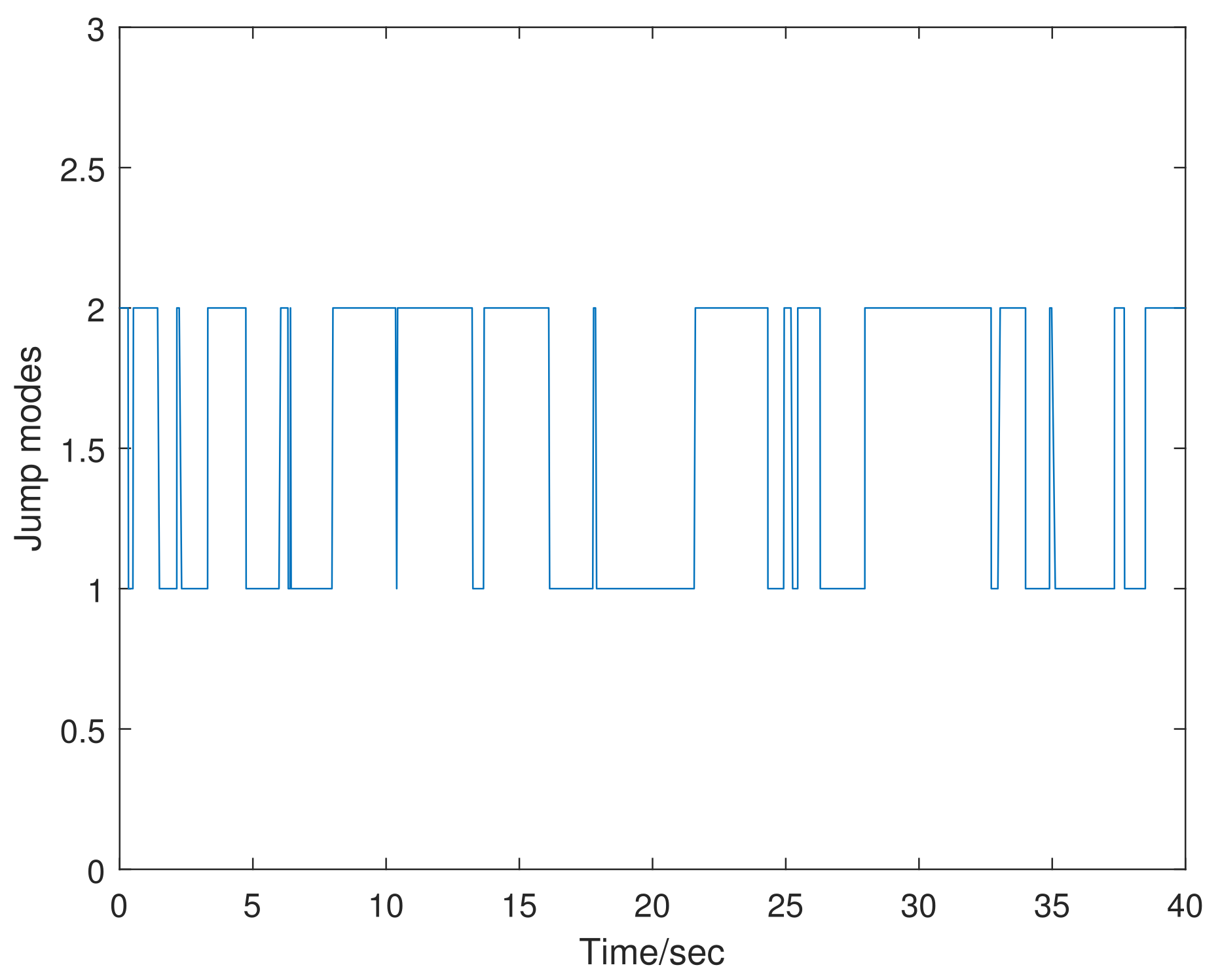
The actuator fault and sensor fault estimations using the proposed method are depicted in Figure 1 and Figure 2, respectively. Figure 3 and Figure 4 show the trajectories of the states and their estimation. One possible realization of the Markovian jumping mode is illustrated in Figure 5.
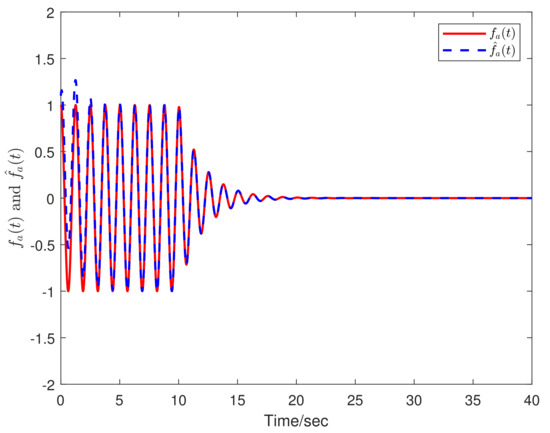
Figure 1.
and its estimation.
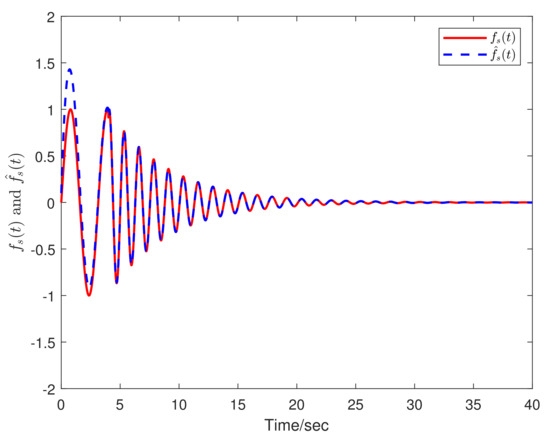
Figure 2.
and its estimation.
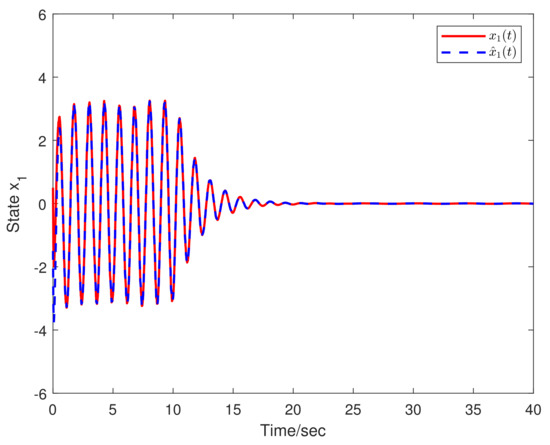
Figure 3.
and its estimation.
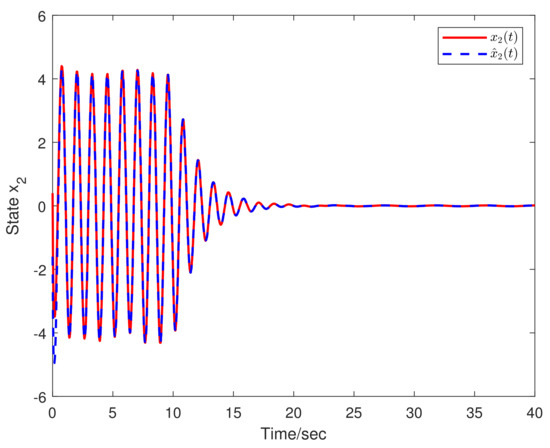
Figure 4.
and its estimation.
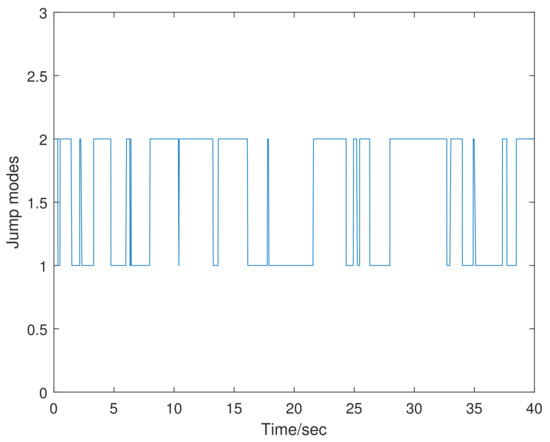
Figure 5.
The jumping modes.
Figure 1, Figure 2, Figure 3 and Figure 4 show that the state, actuator faults, and sensor faults can be estimated by the LTFEO (13). By defining the fault functions, it can easily be determined that their derivatives oscillate at first and then converge to zero. According to Figure 3 and Figure 4, we can see that the state also oscillates at first and then converges to zero. It means that the proposed controller guarantees the DISS of the overall closed-loop system with respect to the derivative of the faults.
5. Conclusions
In this paper, the observer-based FTC problems for a class of descriptor Markovian jump systems with actuator faults and sensor faults are considered. An improved LTFEO is proposed to estimate the original system state, actuator faults, and sensor faults by constructing a new augmented system. The influence of the sensor faults is eliminated in the LTFEO such that the estimation of the original system state can be used for FTC design. It is proved that the error system is DISS with respect to the derivative of the faults. Compared with the FTC in the literature [23], an observer-based FTC strategy is proposed to guarantee that the state of the closed-loop system is ISS with respect to estimation error. It is shown that a cascaded, interconnected system composed of an ISS subsystem followed by a DISS subsystem is still DISS. Therefore, the state of the closed-loop system described in (30) is also DISS with respect to the derivative of the faults. Finally, a numerical example is given to verify the effectiveness of the proposed method. However, there are some limitations in this paper. For example, the controller designed in this paper cannot handle an asynchronous phenomenon of system mode and controller mode. Future work will have to focus on extending our designed methods to an asynchronous FTC for more complicated systems such as time-delay DMJSs with general uncertain transition rates.
Author Contributions
Writing—original draft, X.S. and H.S.; writing—review and editing, A.B. All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by the National Natural Science Foundation of China under Grant No. 61074005 and the Talent Project of the High Education of Liaoning Province (LR2012005).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data used to support the findings of this study were obtained directly from the simulation by the authors.
Acknowledgments
This research is supported by the National Natural Science Foundation of China under Grant No. 61074005 and the Talent Project of the High Education of Liaoning Province (LR2012005).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Xu, S.; Lam, J. Robust Control and Filtering of Singular Systems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Li, J.; Yang, G.H. Fuzzy descriptor sliding mode observer design: A canonical form-based method. IEEE Trans. Fuzzy Syst. 2019, 28, 2048–2062. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, C.; Zhang, X. Complexity, Analysis and Control of Singular Biological Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 421. [Google Scholar]
- Duan, G.R. Analysis and Design of Descriptor Linear Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010; Volume 23. [Google Scholar]
- Li, J.; Zhai, D. A descriptor regular form-based approach to observer-based integral sliding mode controller design. Int. J. Robust Nonlinear Control 2021, 31, 5134–5148. [Google Scholar] [CrossRef]
- Dai, L. Singular Control Systems; Lecture Notes in Control and Information Sciences; Springer: Berlin, Germany, 1989; Volume 118. [Google Scholar]
- Li, Y.; Yu, Z.; Liu, Y.; Ren, J. Stochastic Stabilization for Discrete-Time Markovian Jump Systems With Time-Varying Delay and Two Markov Chains Under Partly Known Transition Probabilities. IEEE Access 2021, 9, 26937–26947. [Google Scholar] [CrossRef]
- Li, Y.; Sun, Q.; Ren, J.; Liu, Y. Sliding mode control of one-sided Lipschitz nonlinear Markovian jump systems with partially unknown transition rates. IEEE Access 2020, 8, 158306–158316. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Q.; Yan, X.G.; Spurgeon, S.K. Integral sliding mode control for Markovian jump T–S fuzzy descriptor systems based on the super-twisting algorithm. IET Control Theory Appl. 2017, 11, 1134–1143. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.G.; Park, J.H.; Su, H.; Chu, J. Delay-dependent passivity for singular Markov jump systems with time-delays. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 669–681. [Google Scholar] [CrossRef]
- Wang, G.L. Robust stabilization of singular Markovian jump systems with uncertain switching. Int. J. Control Autom. Syst. 2013, 11, 188–193. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Q. Finite-time H∞ control for singular Markovian jump systems with partly unknown transition rates. Appl. Math. Model. 2016, 40, 302–314. [Google Scholar] [CrossRef]
- Lam, J.; Shu, Z.; Xu, S.; Boukas, E.K. Robust control of descriptor discrete-time Markovian jump systems. Int. J. Control 2007, 80, 374–385. [Google Scholar] [CrossRef]
- Hamayun, M.T.; Edwards, C.; Alwi, H. Fault Tolerant Control Schemes Using Integral Sliding Modes; Springer: Berlin, Germany, 2016. [Google Scholar]
- Chakravarty, A.; Mahanta, C. Actuator fault-tolerant control (FTC) design with post-fault transient improvement for application to aircraft control. Int. J. Robust Nonlinear Control 2016, 26, 2049–2074. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M.; Schröder, J. Diagnosis and Fault-Tolerant Control; Springer: Berlin, Germany, 2006; Volume 2. [Google Scholar]
- Ding, S.X. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools; Springer Science & Business Media: Berlin, Germany, 2008. [Google Scholar]
- Li, X.; Karimi, H.R.; Wang, Y.; Lu, D.; Guo, S. Robust fault estimation and fault-tolerant control for Markovian jump systems with general uncertain transition rates. J. Frankl. Inst. 2018, 355, 3508–3540. [Google Scholar] [CrossRef]
- Rodrigues, M.; Hamdi, H.; Theilliol, D.; Mechmeche, C.; BenHadj Braiek, N. Actuator fault estimation based adaptive polytopic observer for a class of LPV descriptor systems. Int. J. Robust Nonlinear Control 2015, 25, 673–688. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.J.; Yang, G.H. Fault estimation for fuzzy delay systems: A minimum norm least squares solution approach. IEEE Trans. Cybern. 2016, 47, 2389–2399. [Google Scholar] [CrossRef]
- Liu, M.; Shi, P.; Zhang, L.; Zhao, X. Fault-tolerant control for nonlinear Markovian jump systems via proportional and derivative sliding mode observer technique. IEEE Trans. Circuits Syst. Regul. Pap. 2011, 58, 2755–2764. [Google Scholar] [CrossRef]
- Zhu, J.W.; Yang, G.H.; Wang, H.; Wang, F. Fault estimation for a class of nonlinear systems based on intermediate estimator. IEEE Trans. Autom. Control 2015, 61, 2518–2524. [Google Scholar] [CrossRef]
- Huang, S.J.; Zhang, D.Q.; Guo, L.D.; Wu, L.B. Lower Triangle Factor-Based Fault Estimation and Fault Tolerant Control for Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2019, 28, 2533–2542. [Google Scholar] [CrossRef]
- Shi, P.; Liu, M.; Zhang, L. Fault-tolerant sliding-mode-observer synthesis of Markovian jump systems using quantized measurements. IEEE Trans. Ind. Electron. 2015, 62, 5910–5918. [Google Scholar] [CrossRef] [Green Version]
- Jin, X. Adaptive fault-tolerant control for a class of output-constrained nonlinear systems. Int. J. Robust Nonlinear Control 2015, 25, 3732–3745. [Google Scholar] [CrossRef]
- Yang, Y.; Yue, D. Distributed adaptive fault-tolerant control of pure-feedback nonlinear multi-agent systems with actuator failures. Neurocomputing 2017, 221, 72–84. [Google Scholar] [CrossRef]
- Liu, M.; Ho, D.W.; Shi, P. Adaptive fault-tolerant compensation control for Markovian jump systems with mismatched external disturbance. Automatica 2015, 58, 5–14. [Google Scholar] [CrossRef]
- Liu, M.; Cao, X.; Shi, P. Fault estimation and tolerant control for fuzzy stochastic systems. IEEE Trans. Fuzzy Syst. 2012, 21, 221–229. [Google Scholar] [CrossRef]
- Angeli, D.; Sontag, E.D.; Wang, Y. Input-to-state stability with respect to inputs and their derivatives. Int. J. Robust Nonlinear Control.-Ifac-Affil. J. 2003, 13, 1035–1056. [Google Scholar] [CrossRef]
- Khargonekar, P.P.; Petersen, I.R.; Zhou, K. Robust stabilization of uncertain linear systems: Quadratic stabilizability and H/sup infinity/control theory. IEEE Trans. Autom. Control 1990, 35, 356–361. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Staroswiecki, M. Dynamic output feedback-fault tolerant controller design for Takagi–Sugeno fuzzy systems with actuator faults. IEEE Trans. Fuzzy Syst. 2009, 18, 194–201. [Google Scholar] [CrossRef]
- Huang, S.J.; Yang, G.H. Fault tolerant controller design for T–S fuzzy systems with time-varying delay and actuator faults: A K-step fault-estimation approach. IEEE Trans. Fuzzy Syst. 2014, 22, 1526–1540. [Google Scholar] [CrossRef]
- Wang, G.; Yi, C. Fault estimation for nonlinear systems by an intermediate estimator with stochastic failure. Nonlinear Dyn. 2017, 89, 1195–1204. [Google Scholar] [CrossRef]
- Dynkin, E.B. Functionals of Markov Processes: Markov Processes; Springer: Berlin/Heidelberg, Germany, 1965. [Google Scholar]
- Li, X.; Zhu, F. Fault-tolerant control for Markovian jump systems with general uncertain transition rates against simultaneous actuator and sensor faults. Int. J. Robust Nonlinear Control 2017, 27, 4245–4274. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).