Abstract
We study the notions of pedal curves, contrapedal curves and -Gauss maps of non-lightlike regular curves in Minkowski 3-space. Then we establish the relationships among the evolutes, the pedal and contrapedal curves. Moreover, we also investigate the singularities of these objects. Finally, we show some examples to comprehend the characteristics of the pedal and contrapedal curves in Minkowski 3-space.
1. Introduction
As one of the classical topics of differential geometry, pedal curves have been studied with great enthusiasm in recent years and scholars have achieved many results (cf. [1,2,3,4,5,6]). One found that the pedal curve has a symmetric relationship with the original curve. For any fixed curve, we can always give its pedal curve. This symmetry is also called dual in mathematics. There are many curves with symmetry, such as evolutes, involutes, Bertrand curves, Mannheim curves and so on. A lot of scholars are interested in geometric objects with symmetry in different spaces, and they study the different properties of them (cf. [7,8,9,10]).
In fact, there are many definitions of pedal curves in different spaces. According to [11], MacLaurin defined the trajectory of foot of the perpendicular from the given point to the tangent of the curve as the pedal curve. As an extension of the theory, Izumiya and Takeuchi gave the notions of the evolutoids and pedaloids in in [12], where they showed that the pedal curve of the evolute is the contrapedal curve of the original curve. In 1907, Minkowski space was put forward by Minkowski, which is basically a combination of Euclidean 3-space and time into a four-dimensional manifold. Since Minkowski space was proposed, it has been studied by researchers domestically (cf. [13,14,15,16,17]). Bakurová introduced pedal curves in Minkowski plane in [18]. In [19], Izumiya and Takeuchi introduced families of relatives of pedal curves and evolutes and revealed some connections between these curve families. Moreover, Şekerci and Izumiya defined evolutoids and pedaloids in and proved that the previous conclusions still hold in this plane. In [20], when the base curves have singularities, the pedal curves are defined by Li and Pei. They also investigated its singularity and calculated the relationships between the singular point of the pedal curves and inflection point.
Another important study was done by Izumiya, Pei and Sano in [5], they gave the notions of the lightcone pedal curves and lightcone Gauss map. They also established the relationships among singularities of these objects. Moreover, they proved that there is a correspondence between the singularity of the pedal curve and the lightcone Gauss map. However, at least as far as we know, there are not many papers about pedal curves related to regular space curves in . Therefore, this paper examines this issue.
This paper is structured as follows: We quickly review the necessary preparatory knowledge about Minkowski 3-space in Section 2. We define the pedal curves, contrapedal curves and -Gauss maps of non-lightlike regular curves and consider the propositions of these objects in Section 3. Then, in Section 4, we show that when the pedal curve is singular, the relationships between the singularity of the pedal curves and original curves. In order to explain the main theorem, we show two examples in Section 5.
Without special instructions, all maps and manifolds are in this paper.
2. Preliminaries
In this section, we present some necessary preparatory knowledge that will help us to understand the main results.
Let be the 3-dimensional vector space. For any and in , the pseudo scalar product of and is defined by We call a Minkowski 3-space and denote it as
We say that is spacelike, lightlike and timelike if and , respectively.
We define the norm of by
For any and in , the pseudo vector product of is defined by
where {,,} is the canonical basis of For the basic notions in Minkowski geometry see [21].
Let I be an open interval in be a regular curve, we call is spacelike, lightlike and timelike if is spacelike, lightlike and timelike, respectively, for any
Let be a non-lightlike regular curve, and s be the arc-length parameter. In this situation, is the unit tangent vector. The curvature is defined by If then we can give the unit principal normal vector by and the unit binormal vector by We denote that Then is a pseudo orthonormal frame of Moreover, we have the following Frenet-Serret type formulas
where is the torsion of (cf. [22]).
We define the hyperbolic 2-space by
the de Sitter 2-space by
the evolute of a non-lightlike regular curve without inflection points in by
3. Non-Lightlike Pedal Cueves in
According to [3], we call the locus of the closest point to the given point on the osculating plane of the pedal curve in . Similarly, we obtain the pedal curve of a curve by projecting the given point to the osculating plane of the curve.
Definition 1.
Let be a non-lightlike regular curve in and be an arbitrary fixed point in . We now define a curve by
We call the pedal curve, the pedal point and the pedal vector.
By straightforward calculations, the proposition below can be obtained.
Proposition 1.
Let be a non-lightlike regular curve in . The pedal curve of γ is and then the following hold.
If , then is a spacelike point on the pedal curve.
If , then is a lightlike point on the pedal curve.
If , then is a timelike point on the pedal curve.
Proof.
It follows that
We have known that is a spacelike point, lightlike point and timelike point if is positive, vanishing and negative, respectively. This completes the proof. □
According to [5], the singularities of lightcone Gauss map and lightcone pedal curve are dual. We can obtain a similar conclusion when we define the -Gauss map as follows.
Let the -Gauss map be defined by where
Meanwhile,
In the following, we give the relation between the -Gauss map and the pedal curve.
Theorem 1.
Let be a non-lightlike regular curve in The pedal curve of γ is . Suppose that for any then
is a fold point of the -Gauss map if and only if and
is a cusp point of the pedal curve if and only if and
In Minkowski 3-space, the pedal curve also has a symmetrical relation with another curve, and we call this curve as the contrapedal curve. Following the Definition 1, we can get the contrapedal curve of by projecting the point to the normal plane, where is an arbitrary fixed point.
Definition 2.
Let be a non-lightlike regular curve in We now define a curve by
We call as the contrapedal curve of
The relationships among the evolutes, the pedal and contrapedal curves are given as following.
Theorem 2.
Let be a non-lightlike regular curve in without inflection points. Suppose that the evolute is regular, then we have
Proof.
By differentiating the Formula (1), we obtain
Then, we can get
We denote the unit binormal vector of the evolute as then
where is the signature of
The pedal curve of is given by
Therefore, we obtain
This completes the proof. □
The Theorem 2 is a generalization of the result for By restricting the conditions in this theorem, we can obtain a result similar to that for .
Corollary 1.
Let be a spacelike regular curve in without inflection points. Suppose that and the evolute is regular, then we have
4. Singularities of 3-Dimensional Non-Lightlike Curves
In this section, we describe the singularity of a pedal curve and classify its singularities.
To consider the singular point, we quickly retrospect the criteria of singular points of curves (cf. [23,24,25]).
Proposition 2.
Let be a non-lightlike curve and be a singular point. Then, we have the following conclusions.
has a -cusp at if and only if and are linearly independent.
has a -cusp at if and only if and and are linearly independent.
has a -cusp at if and only if for some constant and and are linearly independent.
has a -cusp at if and only if and are linearly dependent and and are linearly independent.
Differentiating Equation (2) with respect to s, we have the following equations.
Lemma 1.
Let be a non-lightlike regular curve in . The pedal curve of γ is , then we get
Based on the definition of pedal curve, we show the following theorem by using Propositon 2 and Lemma 1.
Theorem 3.
Let be a non-lightlike regular curve in . The pedal curve of γ is then we have
CASE 1: Suppose that for any and is a singular point of that is,
has a -cusp at if and only if
has a -cusp at if and only if and
has a -cusp at if and only if and
has a -cusp at if and only if and
CASE 2: Suppose that there exists such that then is a singular point of and we have
does not have , and -cusp at
has a -cusp at if and only if
CASE 3: Suppose that there exists such that then is a singular point of and we have
has a -cusp at if and only if
has a -cusp at if and only if and
does not have -cusp at
has a -cusp at if and only if and
Proof.
CASE 1: Suppose that then
In this situation, suppose that is, then we have the following.
and are linearly independent if and only if
and are linearly dependent if and only if Thus, where
Therefore, has a -cusp at if and only if has a -cusp at if and only if and
Suppose that is, then we have the following.
and are linearly independent if and only if
and are linearly dependent and if and only if and
Therefore, has a -cusp at if and only if and has a -cusp at if and only if and
CASE 2: Suppose that there exists such that then
In this situation, since does not have and -cusp at Moreover, and are linearly dependent if and only if it follows that So, does not have -cusp at and are linearly independent if and only if therefore, has a -cusp at if and only if
The other case is similar to the above proofs. □
The following theorem shows the relationship between the singular points of the pedal curves and the intersection points of pedal and contrapedal curves.
Theorem 4.
Let be a non-lightlike regular curve in , the pedal curve of γ is . Suppose that , then has a singular point at and we have
5. Examples
To demonstrate the characteristics of pedal and contrapedal curves in better, we provide the following two examples. For the sake of the brevity of the example results, we use the parameter t instead of the arc-length parameter
Example 1.
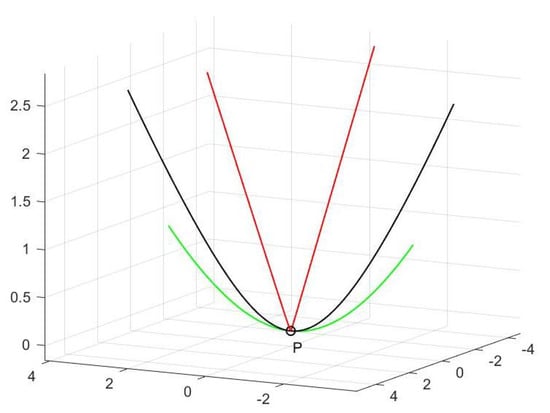
Let
then γ is a spacelike curve, and we obtain
If we take then
According to Theorem 4, has a singular point at We draw it in Figure 1.
Figure 1.
The curve (green), its pedal (red) and contrapedal curve (black).
Example 2.
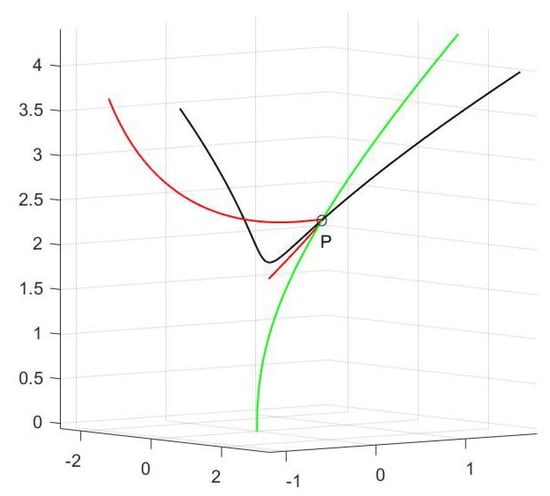
Let
then γ is a timelike curve, and we obtain
If we take then
According to Theorem 4, has a singular point at We draw it in Figure 2.
Figure 2.
The curve (green), its pedal (red) and contrapedal curve (black).
Author Contributions
Writing—Original Draft Preparation, M.L. and K.Y.; Writing—Review and Editing, P.L. and D.P.; Funding Acquisition, D.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (Grant number. 11671070).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Oğulcan Tuncer, O.; Ceyhan, H.; Gök, İ.; Nejat Ekmekci, F. Notes on pedal and contrapedal curves of fronts in the Euclidean plane. Math. Methods Appl. Sci. 2018, 41, 5096–5111. [Google Scholar] [CrossRef]
- Nishimura, T. Normal forms for singularities of pedal curves produced by non-singular dual curve germs in Sn. Geom. Dedicata 2008, 133, 59–66. [Google Scholar] [CrossRef]
- Nishimura, T. Singularities of pedal curves produced by singular dual curve germs in Sn. Demonstr. Math. 2010, 43, 447–459. [Google Scholar]
- Li, E.; Pei, D. Involute–evolute and pedal–contrapedal curve pairs on S2. Math. Methods Appl. Sci. 2020. [Google Scholar] [CrossRef]
- Izumiya, S.; Pei, D.; Sano, T. The lightcone Gauss map and the lightcone developable of a spacelike curve in Minkowski 3-space. Glasg. Math. J. 2000, 42, 75–89. [Google Scholar] [CrossRef] [Green Version]
- Božek, M.; Foltán, G. On singularities of arbitrary order of pedal curves. Proc. Symp. Comput. Geom. SCG 2012, 21, 22–27. [Google Scholar]
- Zhao, Q.; Pei, D.; Wang, Y. Singularities for One-Parameter Developable Surfaces of Curves. Symmetry 2019, 11, 108. [Google Scholar] [CrossRef] [Green Version]
- Erişir, T.; Güngör, M.; Tosun, M. Geometry of the hyperbolic spinors corresponding to alternative frame. Adv. Appl. Clifford Algebr. 2015, 25, 799–810. [Google Scholar] [CrossRef]
- Honda, S.; Takahashi, M. Bertrand and Mannheim curves of framed curves in the 3-dimensional Euclidean space. Turk. J. Math. 2020, 44, 883–899. [Google Scholar] [CrossRef]
- Fukunaga, T.; Takahashi, M. Involutes of fronts in the Euclidean plane. Beitr. Algebra Geom. 2016, 57, 637–653. [Google Scholar] [CrossRef] [Green Version]
- Bruneau, O. ICT and history of mathematics: The case of the pedal curves from 17th-century to 19th-century. In 6th European Summer University on the History and Epistemology in Mathematics Education; Verlag Holzhausen: Vienna, Austria, 2010; pp. 363–370. [Google Scholar]
- Izumiya, S.; Takeuchi, N. Evolutoids and pedaloids of plane curves. Note Mat. 2019, 39, 13–23. [Google Scholar]
- Ersoy, S.; Tosun, M. Timelike Bertrand curves in semi-Euclidean space. Int. J. Math. Stat. 2013, 14, 78–89. [Google Scholar]
- Zhao, X.; Pei, D. Pedal Curves of the Mixed-Type Curves in the Lorentz-Minkowski Plane. Mathematics 2021, 9, 2852. [Google Scholar] [CrossRef]
- Li, P.; Pei, D. Nullcone Fronts of Spacelike Framed Curves in Minkowski 3-Space. Mathematics 2021, 9, 2939. [Google Scholar] [CrossRef]
- Saloom, A.; Tari, F. Curves in the Minkowski plane and their contact with pseudo-circles. Geom. Dedicata 2012, 159, 109–124. [Google Scholar] [CrossRef]
- Hanif, M.; Hou, Z.; Nisar, K. On special kinds of involute and evolute curves in 4-dimensional Minkowski space. Symmetry 2018, 10, 317. [Google Scholar] [CrossRef] [Green Version]
- Bakurová, V. On Singularities of Pedal Curves in the Minkowski Plane. Proc. Symp. Comput. Geom. SCG 2013, 22, 5–10. [Google Scholar]
- Şekerci, G.; Izumiya, S. Evolutoids and Pedaloids of Minkowski Plane Curves. Bull. Malays. Math. Sci. Soc. 2021, 44, 2813–2834. [Google Scholar]
- Li, Y.; Pei, D. Pedal curves of frontals in the Euclidean plane. Math. Methods Appl. Sci. 2018, 41, 1988–1997. [Google Scholar] [CrossRef]
- O’Neill, B. Semi-Riemannian Geometry; Academic Press: New York, NY, USA, 1983. [Google Scholar]
- Izumiya, S.; Takiyama, A. A time-like surface in Minkowski 3-space which contains pseudocircles. Proc. Edinb. Math. Soc. 1997, 40, 127–136. [Google Scholar] [CrossRef] [Green Version]
- Izumiya, S.; Romero Fuster, M.; Ruas, M.; Tari, F. Differential Geometry from a Singularity Theory Viewpoint; World Scientific: Singapore, 2016. [Google Scholar]
- Honda, A.; Saji, K. Geometric invariants of 5/2-cuspidal edges. Kodai Math. J. 2019, 42, 496–525. [Google Scholar] [CrossRef] [Green Version]
- Bruce, J.; Gaffney, T. Simple singularities of mappings C,0→C2,0. J. Lond. Math. Soc. 1982, 26, 465–474. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).