

Dynamic Event-Triggered Adaptive Tracking Control for a Class of Unknown Stochastic Nonlinear Strict-Feedback Systems

Abstract
:1. Introduction
2. Problem Statement and Preliminary
2.1. Problem Statement
2.2. Function Approximation
3. DETC Design and Stability Analysis
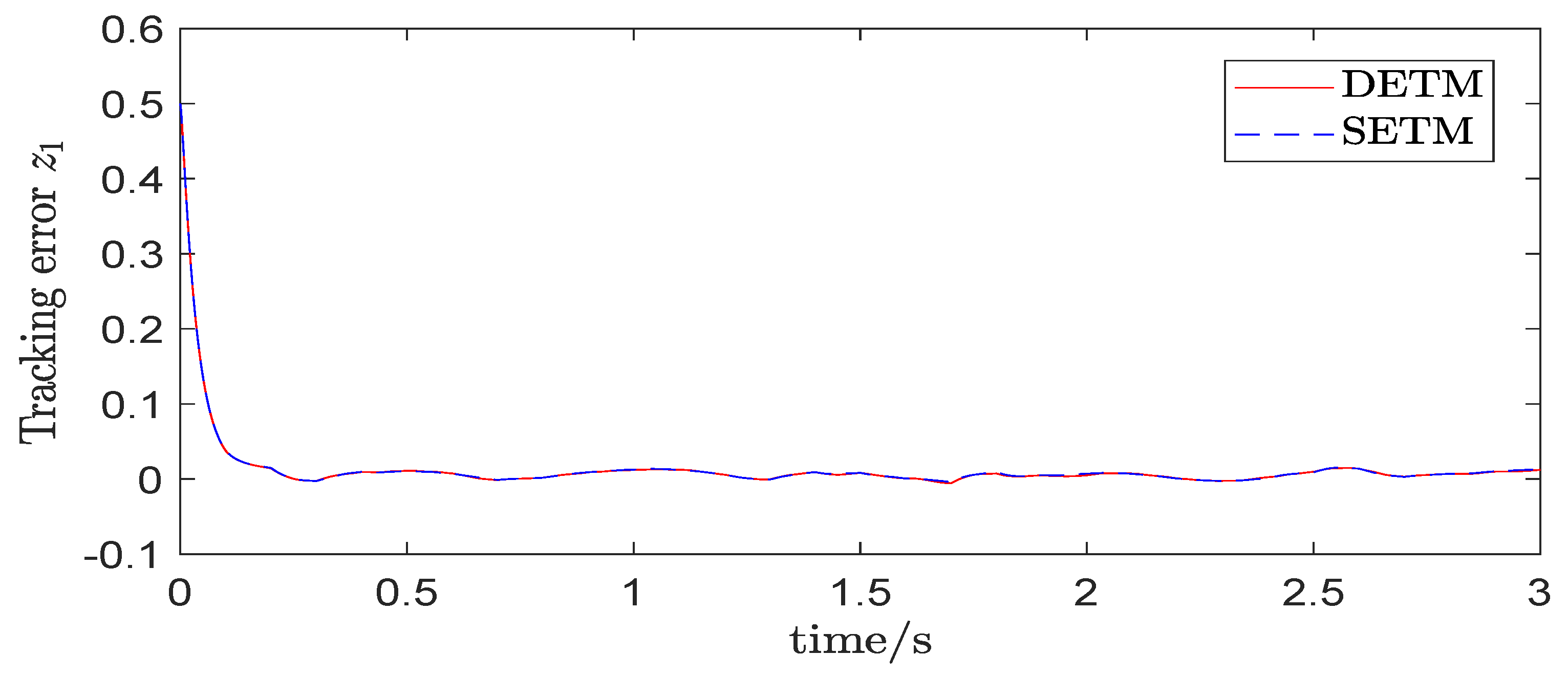
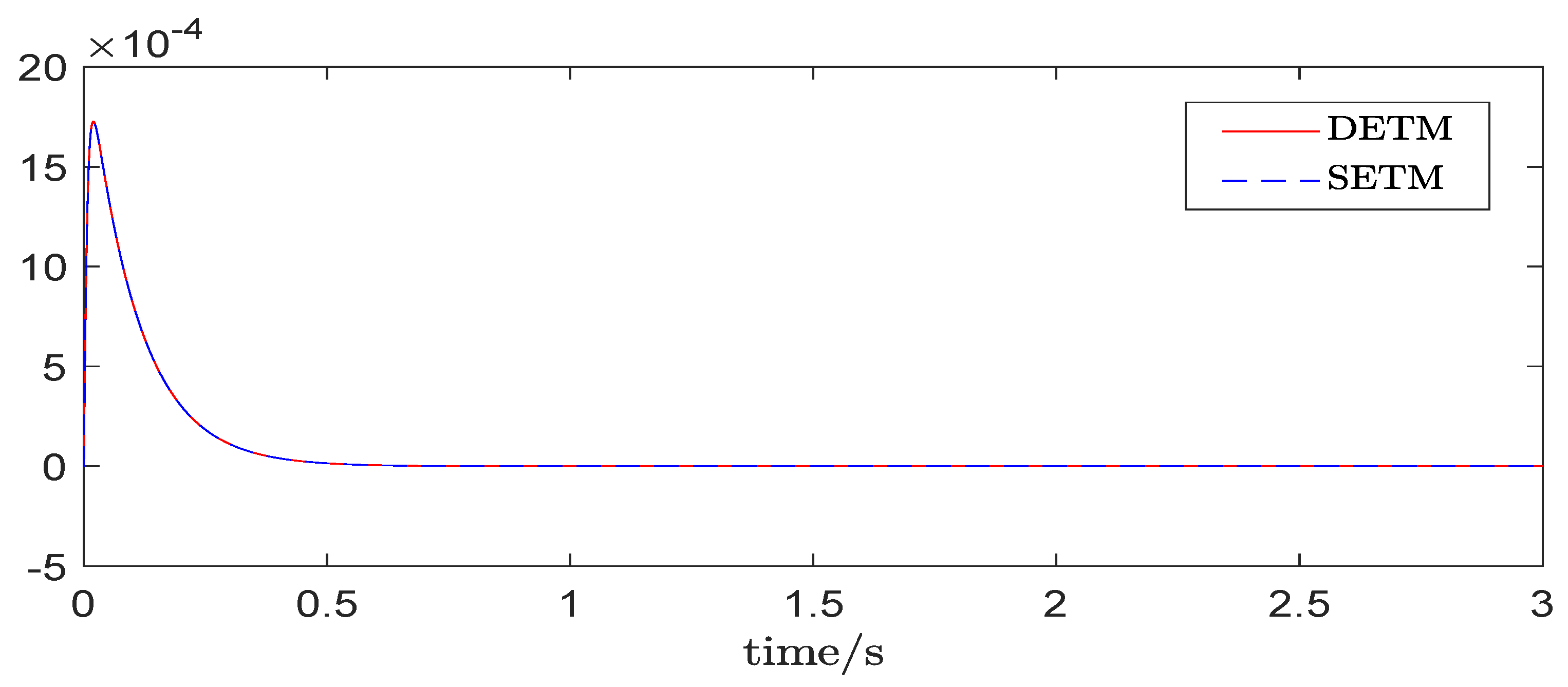
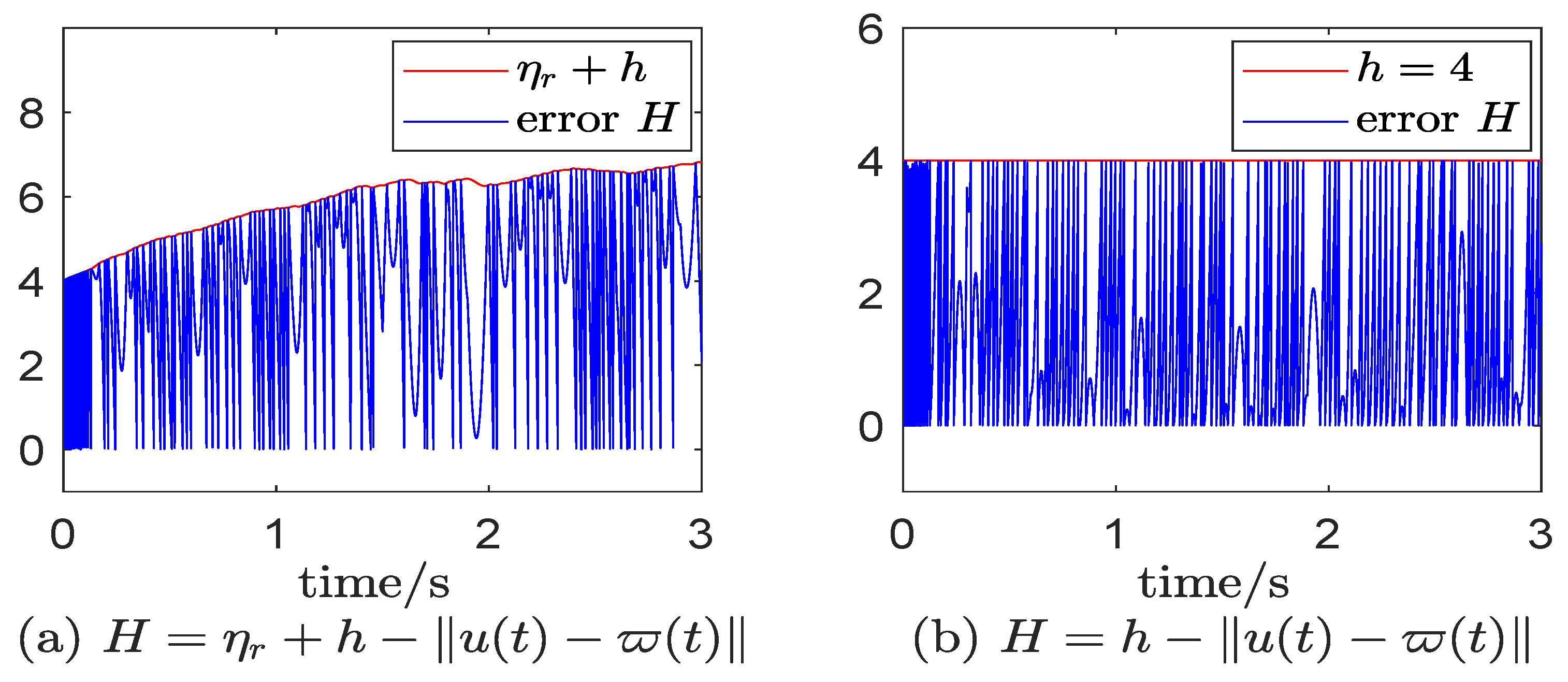
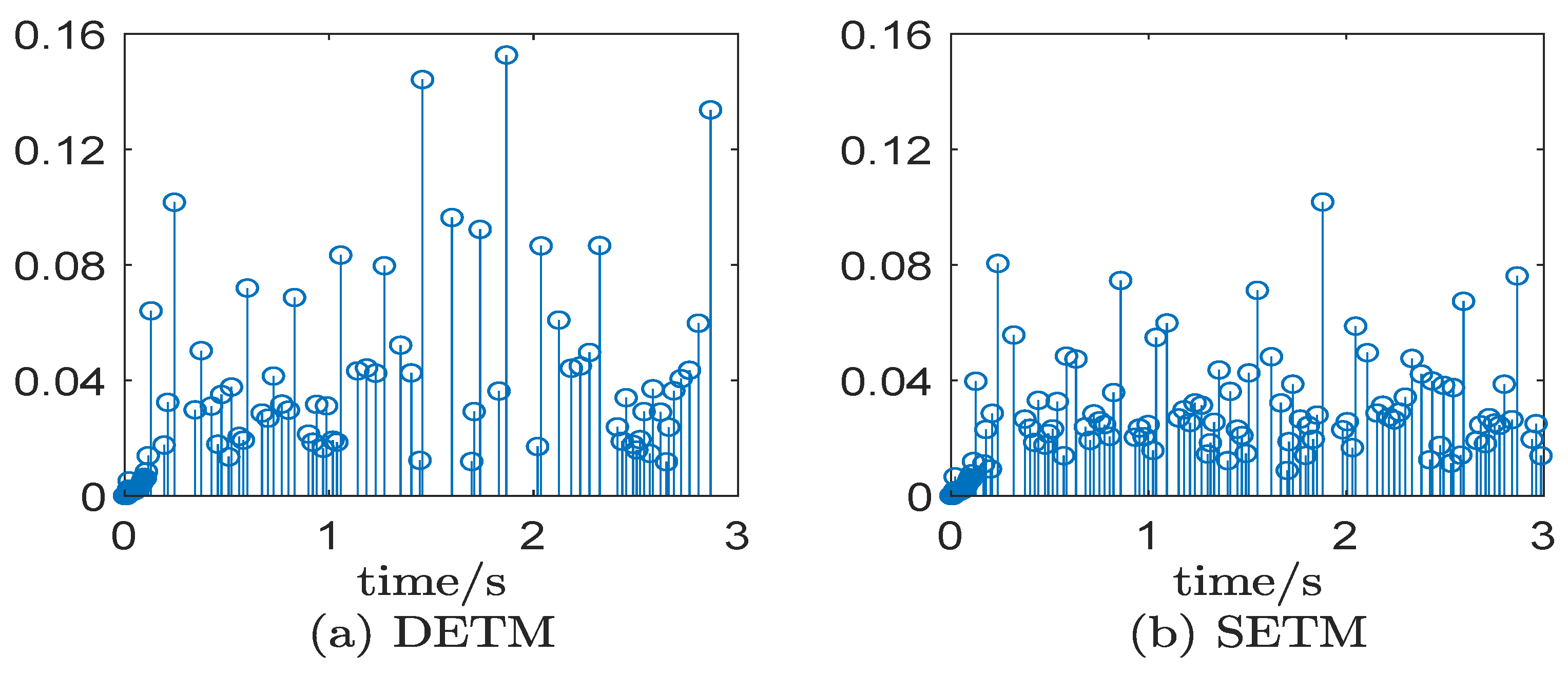
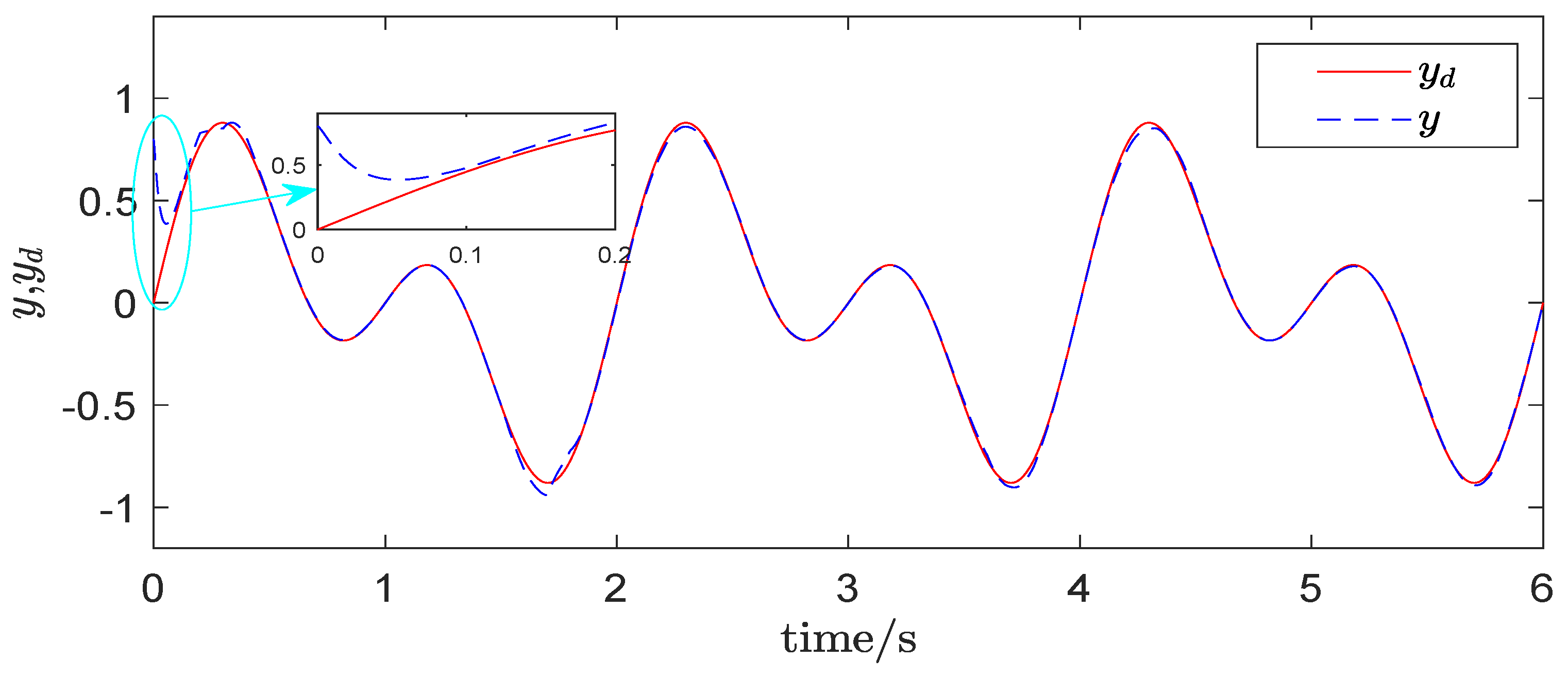
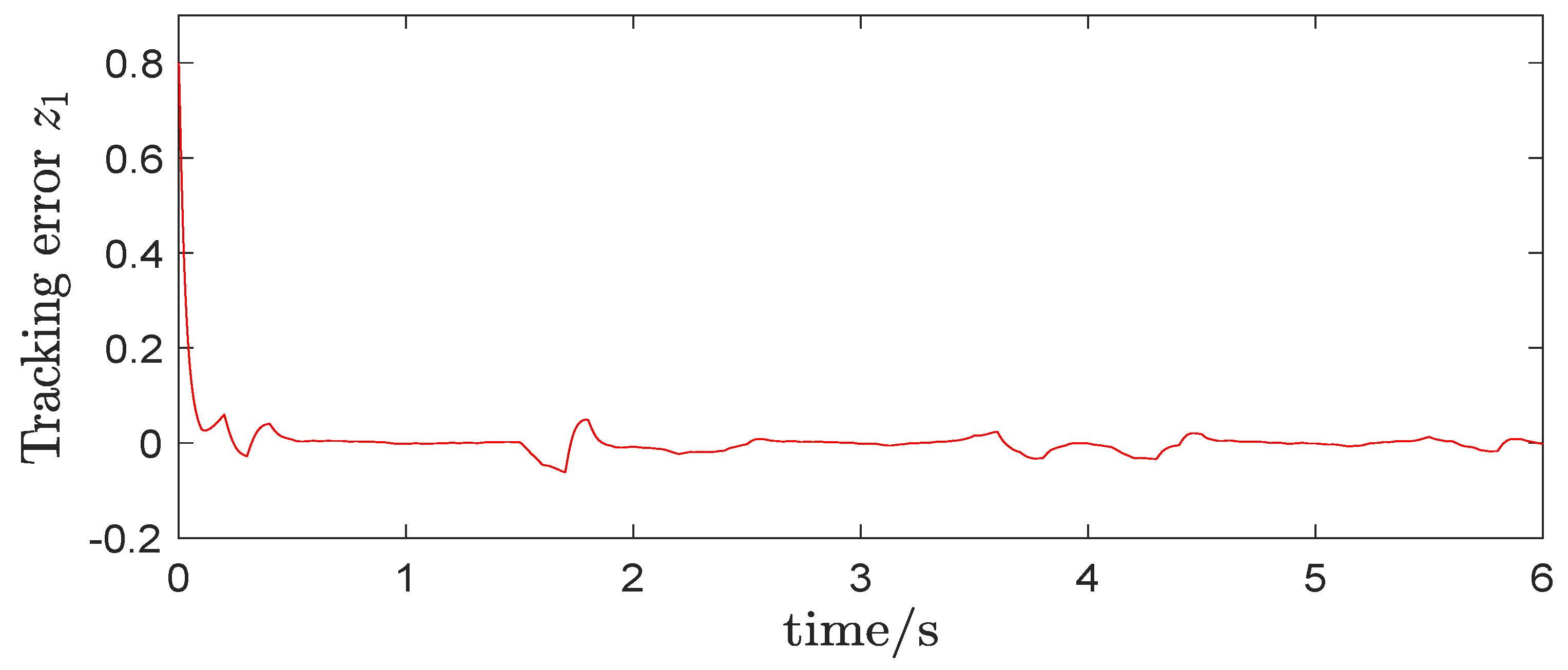
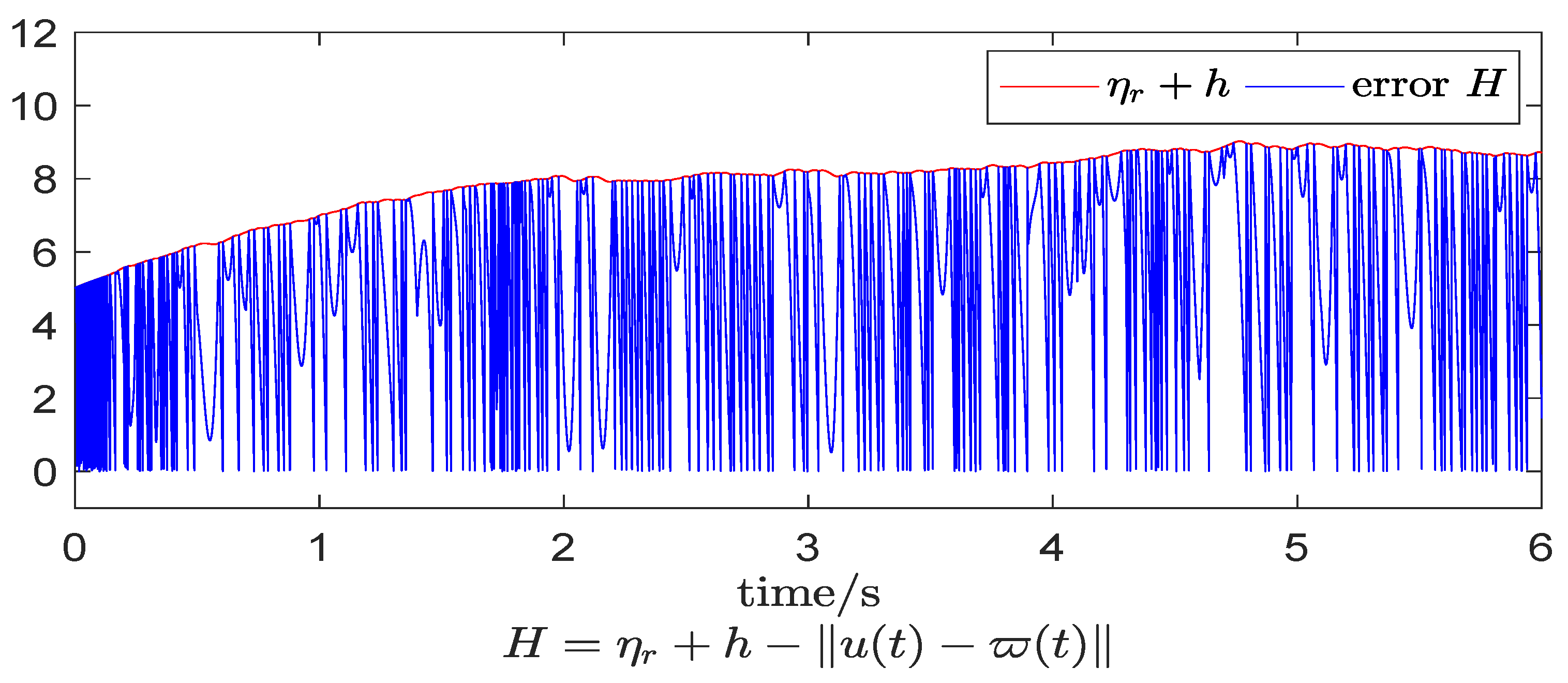
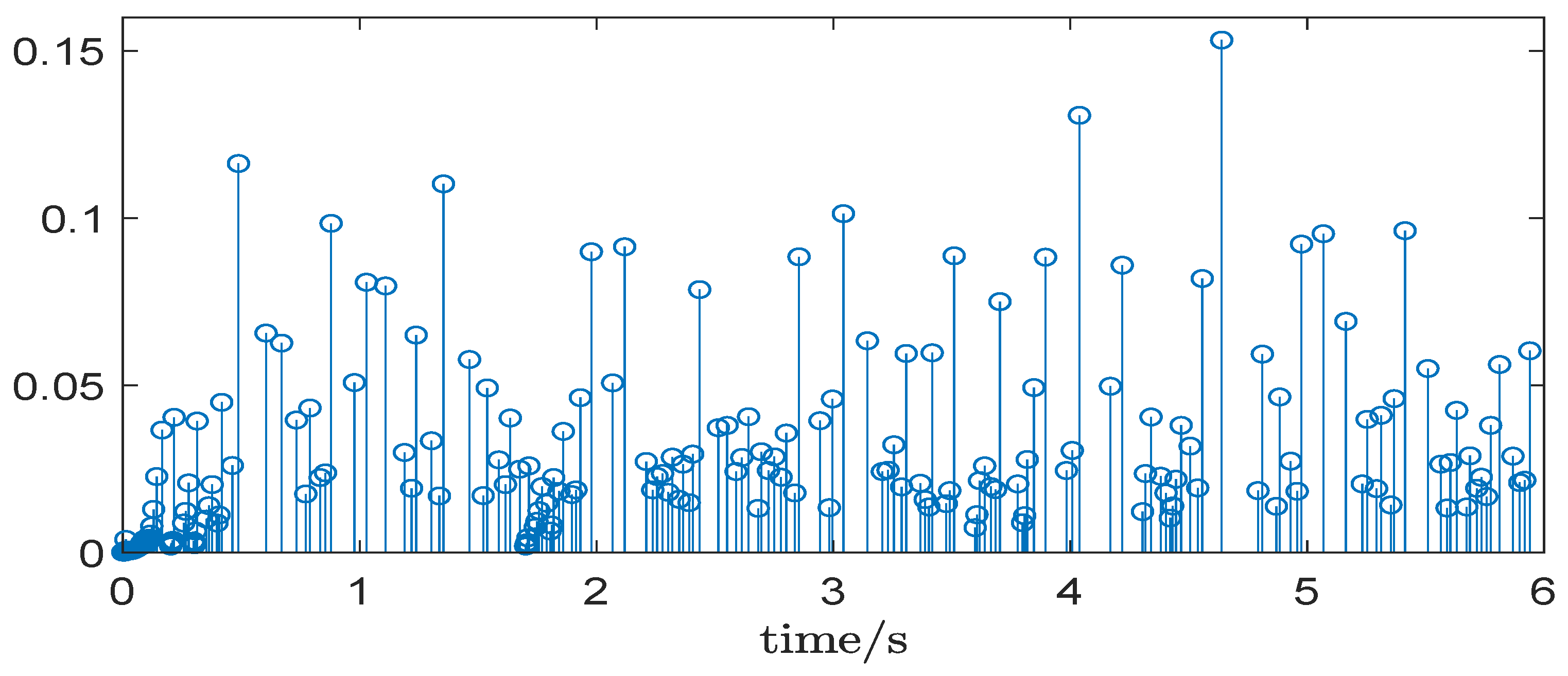
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Åarzén, K.E. A simple event-based PID controller. IFAC Proc. Vol. 1999, 32, 8687–8692. [Google Scholar] [CrossRef]
- Åström, K.J.; Bernhardsson, B. Comparison of periodic and event based sampling for first-order stochastic systems. IFAC Proc. Vol. 1999, 32, 5006–5011. [Google Scholar] [CrossRef] [Green Version]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control. 2007, 52, 1680–1685. [Google Scholar] [CrossRef] [Green Version]
- Tallapragada, P.; Chopra, N. On event triggered tracking for nonlinear systems. IEEE Trans. Autom. Control. 2013, 58, 2343–2348. [Google Scholar] [CrossRef] [Green Version]
- Xing, L.T.; Wen, C.Y.; Liu, Z.T.; Su, H.Y.; Cai, J.P. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control. 2017, 62, 2071–2076. [Google Scholar] [CrossRef]
- Xing, L.T.; Wen, C.Y.; Liu, Z.T.; Su, H.Y.; Cai, J.P. Event-triggered output feedback control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control. 2019, 64, 290–297. [Google Scholar] [CrossRef]
- He, M.; Li, J.M. Event-triggered adaptive tracking control for a class of uncertain stochastic nonlinear systems with Markov jumping parameters. Int. J. Adapt. Control Signal Process. 2018, 32, 1655–1674. [Google Scholar] [CrossRef]
- Liu, C.G.; Liu, X.P.; Wang, H.Q.; Zhou, Y.C.; Lu, S.Y.; Xu, B. Event-triggered adaptive tracking control for uncertain nonlinear systems based on a new funnel function. ISA Trans. 2020, 99, 130–138. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.X.; Deng, F.Q. On event-triggered control of nonlinear stochastic systems. IEEE Trans. Autom. Control 2019, 65, 369–375. [Google Scholar] [CrossRef]
- Qiu, J.B.; Ma, M.; Wang, T. Event-triggered adaptive fuzzy fault-tolerant control for stochastic nonlinear systems via command filtering. IEEE Trans. Syst. Man Cybern. Syst. 2020. [Google Scholar] [CrossRef]
- Li, B.M.; Xia, J.W.; Zhang, H.S.; Shen, H.; Wang, Z. Event-triggered adaptive fuzzy tracking control for stochastic nonlinear systems. J. Frankl. Inst. 2020, 357, 9505–9522. [Google Scholar] [CrossRef]
- Lian, Y.X.; Xia, J.W.; Sun, W.; Wang, Z.; Zhang, H.S. Adaptive fuzzy control for non-strict-feedback stochastic uncertain non-linear systems based on event-triggered strategy. IET Control Theory Appl. 2021, 15, 1018–1027. [Google Scholar] [CrossRef]
- Hu, Z.H.; Mu, X.W. Event-Triggered Impulsive Control for Nonlinear Stochastic Systems. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Zhao, N.N.; Ouyang, X.Y.; Wu, L.B.; Shi, F.R. Event-triggered adaptive prescribed performance control of uncertain nonlinear systems with unknown control directions. ISA Trans. 2020, 99, 130–138. [Google Scholar] [CrossRef]
- Girard, A. Dynamic triggering mechanisms for event-triggered control. IEEE Trans. Autom. Control. 2015, 60, 1992–1997. [Google Scholar] [CrossRef] [Green Version]
- Tripathy, N.S.; Kar, I.N.; Paul, K. Robust dynamic event-triggered control for linear uncertain system. IFAC-PapersOnLine 2016, 49, 207–212. [Google Scholar] [CrossRef]
- Hu, W.F.; Yang, C.H. Consensus of linear multi-agent systems by distributed dynamic event-triggered control. In Proceedings of the 2017 International Workshop on Complex Systems and Networks (IWCSN), Doha, Qatar, 8–10 December 2017; pp. 284–289. [Google Scholar] [CrossRef]
- Li, P.F.; Kang, Y.; Zhao, Y.B.; Zhou, J. Dynamic event-triggered control for networked switched linear systems. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 7984–7989. [Google Scholar] [CrossRef]
- Ge, X.H.; Han, Q.L. Distributed formation control of networked multi-agent systems using a dynamic event-triggered communication mechanism. IEEE Trans. Ind. Electron. 2017, 64, 8118–8127. [Google Scholar] [CrossRef]
- Zuo, Z.Q.; Guan, S.Y.; Wang, Y.J.; Li, H.C. Dynamic event-triggered and self-triggered control for saturated systems with anti-windup compensation. J. Frankl. Inst. 2017, 354, 7624–7642. [Google Scholar] [CrossRef]
- Wang, Y.J.; Jia, Z.X.; Zuo, Z.Q. Dynamic event-triggered and self-triggered output feedback control of networked switched linear systems. Neurocomputing 2018, 314, 39–47. [Google Scholar] [CrossRef]
- Hu, W.F.; Yang, C.H.; Huang, T.W.; Gui, W.H. A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks. IEEE Trans. Cybern. 2018, 50, 869–874. [Google Scholar] [CrossRef] [PubMed]
- Dolk, V.S.; Borgers, D.P.; Heemels, W. Output-based and decentralized dynamic event-triggered control with guaranteed L-p-gain performance and Zeno-freeness. IEEE Trans. Autom. Control. 2016, 62, 34–49. [Google Scholar] [CrossRef]
- Li, H.; Liu, Y.G.; Huang, Y.X. Adaptive stabilization via dynamic event-triggered output feedback for uncertain nonlinear systems. J. Control Theory Appl. 2019, 36, 1871–1878. [Google Scholar] [CrossRef]
- Li, F.Z.; Liu, Y.G. Adaptive event-triggered output-feedback controller for uncertain nonlinear systems. Automatica 2020, 117, 109006. [Google Scholar] [CrossRef]
- Mu, C.X.; Wang, K.; Qiu, T. Dynamic event-triggering neural learning control for partially unknown nonlinear systems. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef]
- Zuo, Z.Q.; Xie, P.F.; Wang, Y.J. Output-based dynamic event-triggering control for sensor saturated systems with external disturbance. Appl. Math. Comput. 2020, 374, 125043. [Google Scholar] [CrossRef]
- Gao, H.; Song, Y.D.; Wen, C.Y. Event-triggered adaptive neural network controller for uncertain nonlinear system. Inf. Sci. 2020, 506, 148–160. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.M.; Zhao, Q.J.; Li, J.; Wu, Z.G. Adaptive neural dynamic surface control with prespecified tracking accuracy of uncertain stochastic nonstrict-feedback systems. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Sun, Y.B.; Zhao, Q.J. Adaptive asymptotic control of stochastic systems with state delay and unknown control directions. IEEE T Circuits-II 2021. [Google Scholar] [CrossRef]
- Seshagiri, S.; Khalil, H.K. Output feedback control of nonlinear systems using RBF neural networks. IEEE Trans. Neural Netw. 2000, 11, 69–79. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, D.; Huang, J. Adaptive neural network control for a class of uncertain nonlinear systems in pure-feedback form. Automatica 2002, 38, 1365–1372. [Google Scholar] [CrossRef]
- Li, J.; Chen, W.S.; Li, J.M.; Fang, Y.Q. Adaptive NN output-feedback stabilization for a class of stochastic nonlinear strict-feedback systems. ISA Trans. 2009, 48, 468–475. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.S.; Jiao, L.C.; Li, J.; Li, R.H. Adaptive NN backstepping output-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Trans. Syst. Man Cybern B Cybern. 2009, 40, 939–950. [Google Scholar] [CrossRef]
- Chen, W.S. Output-feedback adaptive stochastic nonlinear stabilization using neural networks. J. Syst. Eng. Electron. 2010, 21, 81–87. [Google Scholar] [CrossRef]
- Ge, S.S.; Hang, C.C.; Lee, T.H.; Zhang, T. Stable Adaptive Neural Network Control; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Zhu, Q.D.; Liu, Y.C.; Wen, G.X. Adaptive neural network output feedback control for stochastic nonlinear systems with full state constraints. ISA Trans. 2020, 101, 60–68. [Google Scholar] [CrossRef] [PubMed]
- Bai, W.W.; Li, T.S.; Tong, S.C. NN reinforcement learning adaptive control for a class of nonstrict-feedback discrete-time systems. EEE Trans. Cybern. 2020, 50, 4573–4584. [Google Scholar] [CrossRef]
- Deng, Y.J.; Zhang, X.K.; Zhang, G.Q.; Han, X. K; Zhang, G.Q.; Han, X. Adaptive neural tracking control of strict-feedback nonlinear systems with event-triggered state measurement. ISA Trans. 2021. [Google Scholar] [CrossRef]
- Arnold, L.; Lefever, R. Stochastic Nonlinear Systems in Physics, Chemistry, and Biology; Spring: Berlin/Heidelberg, Germany, 1981. [Google Scholar]
- Liu, Z.G.; Wu, Y.Q. Modelling and adaptive tracking control for flexible joint robots with random noises. Int. J. Control. 2014, 87, 2499–2510. [Google Scholar] [CrossRef]
- Diao, S.Z.; Sun, W.; Su, S.F. Neural-based adaptive event-triggered tracking control for flexible-joint robots with random noises. Int. J. Robust Nonlinear Control. 2020. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| h = 4 | h = 3 | h = 2 | h = 1 | |
|---|---|---|---|---|
| DETM | 226 | 267 | 325 | 487 |
| SETM | 254 | 297 | 362 | 559 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Li, J.; Wu, S.; Li, X. Dynamic Event-Triggered Adaptive Tracking Control for a Class of Unknown Stochastic Nonlinear Strict-Feedback Systems. Symmetry 2021, 13, 1648. https://doi.org/10.3390/sym13091648
Fu Y, Li J, Wu S, Li X. Dynamic Event-Triggered Adaptive Tracking Control for a Class of Unknown Stochastic Nonlinear Strict-Feedback Systems. Symmetry. 2021; 13(9):1648. https://doi.org/10.3390/sym13091648
Chicago/Turabian StyleFu, Yingying, Jing Li, Shuiyan Wu, and Xiaobo Li. 2021. "Dynamic Event-Triggered Adaptive Tracking Control for a Class of Unknown Stochastic Nonlinear Strict-Feedback Systems" Symmetry 13, no. 9: 1648. https://doi.org/10.3390/sym13091648
APA StyleFu, Y., Li, J., Wu, S., & Li, X. (2021). Dynamic Event-Triggered Adaptive Tracking Control for a Class of Unknown Stochastic Nonlinear Strict-Feedback Systems. Symmetry, 13(9), 1648. https://doi.org/10.3390/sym13091648