Abstract
In this manuscript, we accelerate the modified inertial Mann-like algorithm by involving Tikhonov regularization terms. Strong convergence for fixed points of nonexpansive mappings in real Hilbert spaces was discussed utilizing the proposed algorithm. Accordingly, the strong convergence of a forward–backward algorithm involving Tikhonov regularization terms was derived, which counts as finding a solution to the monotone inclusion problem and the variational inequality problem. Ultimately, some numerical discussions are presented here to illustrate the effectiveness of our algorithm.
Keywords:
Hilbert space; fixed point; modified inertial Mann-like algorithm; monotone inclusion problem; forward–backward algorithm; numerical discussion MSC:
47H06; 47H09; 47J25
1. Introduction
Let ℶ be a real HS equipped with inner product and induced norm and A be a non-empty CCS of a real HS ℶ. The mapping is called, for all ,
- Lipschitzian if and only if
- NE if and only if
The set of FPs of the mapping P is denoted by that is, . It is common in the science arena for iterations that Mann’s algorithm is one of many successful iteration schemes for approximating FPs of NEMs. The Mann algorithm is written as follows: Let be an arbitrary point in for all
where is a sequence of non-negative real numbers in Researchers in this direction proved under the hypothesis and suitable stipulations forced on the sequence created by (1) converges weakly to an FP of P.
Approximating FP problems for NEMs has many vital applications. Many problems can be seen as FP problems of NEMs, such as convex optimization problems, image restoration problems, monotone variational inequalities, and convex feasibility [1,2,3]. A large number of the symmetrical iteration methods (in Mann-term) for FP problems of NEMs were presented in the literature; for example, see [4,5,6,7,8,9]. Therefore, the innovation of efficient and stable algorithm methods that involved the Mann algorithm attracted tremendous interest from researchers, for example, the forward–backward algorithm [10] and the Douglas–Rachford algorithm [11]. All these symmetric algorithms have a weak convergence, which is a disadvantage of the algorithms mentioned above. Despite this defect, they have more applications in infinite-dimensional spaces, such as quantum physics and image reconstruction. The need for strong convergence became desperate to save time and effort, and especially a weak convergence is disappointing. Several authors obtained strong convergence by putting solid restrictions on the involved mapping, such as in optimization, they considered the concept of strong convexity. In monotone inclusions, they considered strong monotonicity. As a result that there are many cases, this system cannot obtain strong convergence, so it was necessary to investigate new effective algorithms. Recently, several mathematicians were able to apply the strong convergence of algorithms, see [12,13,14,15].
In 2019, Bot et al. [16] proposed a new form for Mann’s algorithm to overcome the deficiency described before, and he formulated it as follows: Let be an arbitrary point in for all
Under mild stipulations for and they proved that the iterative sequence by (2) is strongly convergent. In addition, they applied (2) to obtain the strong convergence of the forward–backward algorithm for MIPs. Sequence in scheme (2) plays an important role in accelerating convergence and is called Tikhonov regularization sequence. On the other hand, the Tikhonov method which generates a sequence by the rule
where are defined in the next section,
Many theoretical and numerical results for studying strong convergence by Tikhonov regularization technique have been provided, for example, see [16,17,18,19,20,21].
Regularization terms intervene loosely in many applications about artificial regularization. To various gradient flows, the artificial regularization term has played an essential role in the energy stability analysis such as epitaxial thin film model either with or without slope selection, a second order energy stable BDF method for the epitaxial thin film equation with slope selection, and a third order exponential time differencing numerical scheme for no-slope-selection epitaxial thin film model. For more details about this topic, see [22,23,24,25,26,27,28].
Recently, new types of fast algorithms have emerged. One of these algorithms is called the inertial algorithm which was first proposed by Polyak [29]. He presented an inertial extrapolation technique for minimizing a smooth convex function. A common characteristic of inertial algorithms is that the next iteration depends on a combination of the previous two iterates. It should be noted that this slight change has significantly improved the effectiveness and performance of these algorithms. After the emergence of this idea, the authors made efforts to introduce other terms to the inertial algorithm with the aim of increasing the acceleration and studying more in-depth applications, such as inertial extragradient algorithms [9,30,31], inertial projection algorithms [15,32,33], inertial Mann algorithms [33,34], and inertial forward–backward splitting algorithms [35,36,37]. All of these algorithms have one symmetrical convergence form, which is stronger and faster than the inertial algorithms.
According to the above results, this manuscript aims to accelerate the inertial algorithm by introducing a modified inertial Mann-like algorithm. This algorithm is used here to study the strong convergence of FPs of NEMs in real HSs. The forward–backward terms are involved in studying the strong convergence for the minimal norm solution in zeros set under the symmetrical conditions. Finally, our algorithm’s performance and efficiency have been illustrated by some numerical comparisons with previous algorithms. We found that our algorithms converge faster, which indicates our method’s success.
2. Preliminaries
In this section, we shall introduce some previous symmetrical subsequences which greatly help in understanding our paper. Throughout this manuscript, the notions ⟶ and ⇒ denote strong convergence and multivalued mappings, respectively, denotes the graph of the mapping P and A is a non-empty CCS in a real HS ℶ.
Lemma 1 ([38]).
Let , and υ be points in a HS ℶ and . Then
Lemma 2 ([39]).
Let ℶ be a real HS. Then, for each
(i) ,
(ii)
Definition 1.
Let be fixed, we say that a mapping is averaged if V is written as where I is an identity mapping and is an NEM.
It is easy to prove that averaged operators are also NE.
Definition 2.
Assume that is a multi-valued operator and its graph described as The operator Γ is called:
- (1)
- monotone, if for all
- (2)
- MM, if it is monotone and its graph is not a proper subset of one of any other monotone mapping;
- (3)
- if for all there is a constant so that
The resolvent of is described by and the reflected resolvent of is defined by The mapping is single-valued, maximally monotone, and NE if is maximally monotone [1]. In addition, iff If is ISM with then is averaged.
We have to remember that, if the function is convex, proper, and lower-semicontinuous, then is called the differentiable of r and it described by
for with We define the proximal operator of r as
It is worth mentioning that i.e., the proximal operator of r, and the resolvent of [1] are symmetric. The indicator function of a non-empty closed and convex set is given by
By the theorem of Baillon-Haddad ([1], Corollary 18.16), is a ISM operator provided that the function is Fréchet differentiable with Lipschitz gradient.
Lemma 3
(Demi-closedness property). Assume that A is a non-empty CCS of a real HS ℶ. Let be an NEM and be a sequence in A and so that converges weakly to φ and as , then
Lemma 4 ([40])
Assume that is a sequence of non-negative real numbers so that
where is a sequence and is a real sequence. Let Then the assumptions below hold:
- (1)
- For some if then the sequence is bounded;
- (2)
- If and then
3. The Strong Convergence of a Modified Inertial Mann-Like Algorithm
In this part, we shall discuss the strong convergence for our proposed algorithm under mild conditions.
Theorem 1.
Let A be a CCS of a real HS ℶ and be an NE mapping so that In addition, suppose the hypotheses below are fulfilled:
- (i)
- with and
- (ii)
- where and
Set arbitrary. Define the sequence by the following iterative scheme:
Then the sequence defined by the algorithm (3) converges to in norm.
Proof.
We split the proof into the following steps:
Step 1. Show that is bounded. Indeed, for any as P is NE and by the definition of , we have
From (3), we get
Similarly, we can obtain
By the fact that exists, consider
Then, inequality (7) is reduced to
By Lemma 4, we conclude that is bounded.
On the other side, by the definition of we have
Therefore, by the boundedness of and hypothesis (ii), we see that is bounded, and thus and are bounded too. From (3), one has
and
Using (4) and Lemma 1, 2 (i), we have
From Lemma 2, one gets
Setting , one can obtain
Since and are bounded, then there is a constant so that
Step 2. Prove that converges strongly to In order to reach it, we will discuss the two cases below:
Case 1. If the sequence is monotonically decreasing, then it is convergent. Therefore, we obtain
this implies with (15) and hypotheses (i) and (ii) that
On the other hand, it is easy to see that
and
Similarly, one has
Using the fact that is demi-closed, then converges weakly to an FP of
Still in our minds is proof that converges strongly to an FP of In view of (14), we have
By hypotheses (i) and (ii), we deduce that
Thus, by Lemma 4, we conclude that
Case 2. Assume that is not a monotonically decreasing sequence. Put Suppose that is a mapping defined by for all (for some large enough ). It is clear that is a non-decreasing with as and for all By Applying (15), we have
which leads to as By the same manner as (17)–(27) in Case 1, we get directly that converges weakly to as Using (26) for , we get
in another form, we have
which leads to
Hence, by hypotheses (i), (ii), and (28), we can obtain
Therefore, Further, for any it can be easily obtained that if that is because for Based on it, we find that for each
Consequently, we conclude that that is in norm. This finishes the proof. □
Remark 1.
We have discussions below about algorithm (3):
- (1)
- If , and for each in algorithm (3), then we get the exciting results of Bot et al. [16].
- (2)
- For the Tikhonov regularization sequences and , one can set for any .
- (3)
- Algorithm (3) is reduced to inertial Mann algorithm introduced by Maingé [34], if we take
- (4)
- The hypothesis (ii) of our theorem is easy to calculate and not complicated because the value is known before choosing so it plays an important role in the numerical discussions. For special options, the parameter in the proposed algorithm can be taken as:for some and is a positive sequence so that This concept was introduced by Beck and Teboulle [41] for the inertial extrapolated step.
- (5)
- If we set in our algorithm, we have the results of Tan and Cho [42].
The result below is very important in the next section, where it has a prominent role in obtaining the strong convergence by the forward–backward method equipped with the Tikhonov regularization term.
Corollary 1.
Assume that A is a non-empty CCS of a real HS ℶ and is an averaged mapping, where with Suppose that the assumptions below hold:
- (C)
- with and
- (C)
- where and
Set arbitrary and define the sequence by:
Then the iterative sequence by (29) converges to an FP of V in norm.
4. Applications
4.1. Solve Monotone Inclusion Problem
According to the general algorithm in Theorem 1, in this part, we will proposed a strongly convergent inertial forward–backward algorithm with Tikhonov regularization terms for solving the MIP below
where is an MM operator and is a ISM operator. MIP (30) has wonderful applications in linear inverse problem, machine learning, and image processing.
Theorem 2.
Let be an MM operator and be an ISM operator so that Assume that . Let the assumptions below hold:
- (MI)
- with and
- (MI)
- where and
Set arbitrary and define the sequence by the iterative scheme below:
Then the sequence generated by (31) converges to in norm.
Proof.
Since the mapping can be described by then algorithm (31) can be written as (3). To discuss the convergence, we consider two situations. The first one is According to ([1], Remark 4.24(iii) and Corollary 23.8), is ISM. Moreover, by means of ([1], Proposition 4.33), is averaged. This implies from ([16], Proposition 6) that P is averaged. By noticing that then the desired result follows by Corollary 1. The second situation is Since is NE, then is too. Therefore, the desired conclusion follows immediately by Theorem 1. □
Remark 2.
The applications below follow from Theorem 2:
- If , and then the algorithm (31) turn into This equation takes another form as,where , , and the term is called the Tikhonov regularization. This term makes rapid convergence of iterative sequence the minimal norm solution. To more details about solving MIOs by Tikhonov-like methods, see [16,43,44].
- Suppose that the function is convex, proper, and lower-semicontinuous, and the function is a convex and Fréchet differentiable with Lipschitz continuous gradient so that Taking For initial values and , and are real sequences verifying assumptions and of Theorem 2, the sequence created by the iterative schemeconverges to in norm.
4.2. Solve Variational Inequality Problem
There are many applications to the variational inequality theory, and this is the reason why researchers working in this direction are constantly increasing. Among the developments involved in variational inequality techniques, contact problems in elasticity [45], economics equilibrium [46], transportation problems [47,48] and fluid flow through porous media [49]. Ideas explaining these formulas have led to the development of powerful new techniques for solving a wide class of linear and nonlinear problems.
In this part, we reformulate the algorithm (3) of Theorem 1 to find a solution to the VIP:
where is a mapping and A is a non-empty CCS of It is common that, for , an arbitrary positive constant is a solution of (32) if and only if
Theorem 3.
Suppose that is a monotone and LC operator on a non-empty CCS A and Put . Let the assumptions below be fulfilled:
- (i)
- with .
- (ii)
- where and
Set arbitrary, then the iterative sequence created by:
converges to in norm.
Proof.
Since is NE, then the proof is finished by Theorem 1. □
5. Numerical Results
In this section, we include some experimental studies that appear in finite and infinite dimensional spaces to illustrate the computational efficiency of the suggested algorithm and to correlate them with certain previously reported algorithms. The MATLAB codes were run in MATLAB version 9.5 (R2018b) on a PC Intel(R) Core(TM)i5-6200 CPU @ 2.30 GHz 2.40 GHz, RAM 8.00 GB.
Example 1.

Consider that a fixed point problem taken from [50] in which the HS through the usual real number space . A mapping is defined by
where the set A is defined by The control conditions for both algorithms are taken as follows:
To illustrate the behaviour in this example see Table 1, Table 2, Table 3 and Table 4 and Figure 1 and Figure 2.
Table 1.
Example 1: Numerical study of Algorithm 1 and .
Table 2.
Example 1: Numerical study of Algorithm 2 and .
Table 3.
Example 1: Numerical study of Algorithm 1 and .
Table 4.
Example 1: Numerical study of Algorithm 2 while .
Figure 1.
(For Example 1): Numerical illustration of Algorithm 1 and Algorithm 2 while .
Figure 2.
(For Example 1): Numerical illustration of Algorithm 1 and Algorithm 2 while .
Example 2.
Let be a mapping defined by
Then P is NE and has a unique fixed point The set A is defined by The control condition for both algorithms are taken as follows:
- Algorithm 1
- Algorithm 2
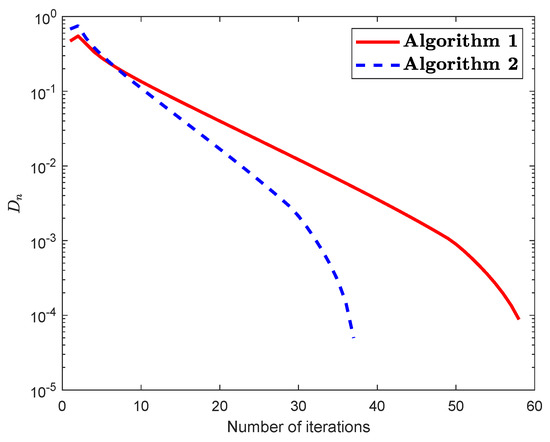
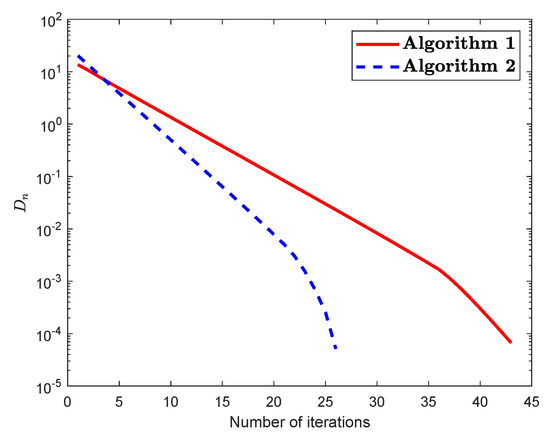
Figure 3.
(For Example 2):Numerical illustration of Algorithm 1 and Algorithm 2 while .
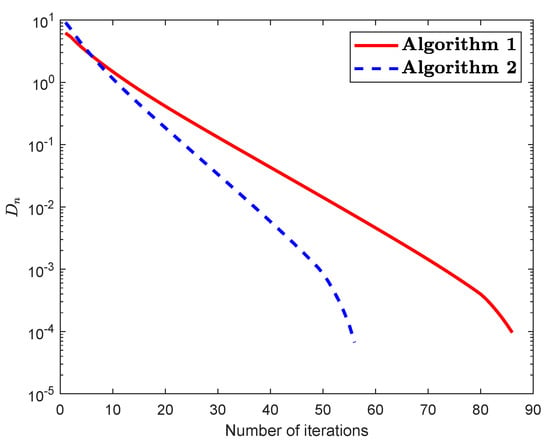
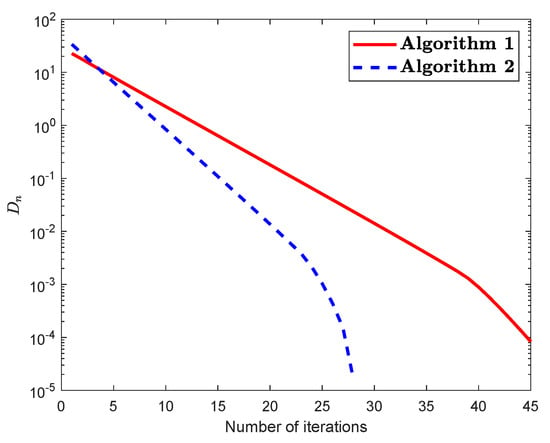
Figure 4.
(For Example 2): Numerical illustration of Algorithm 1 and Algorithm 2 while .
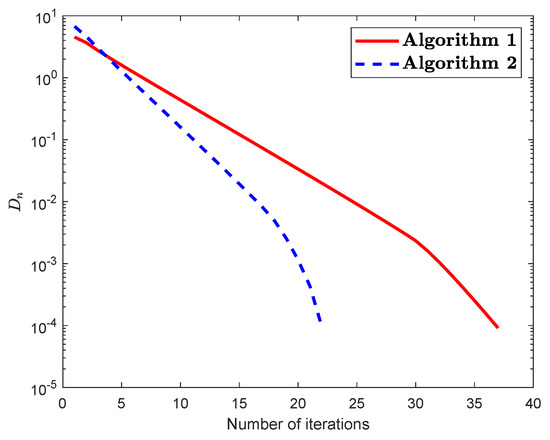
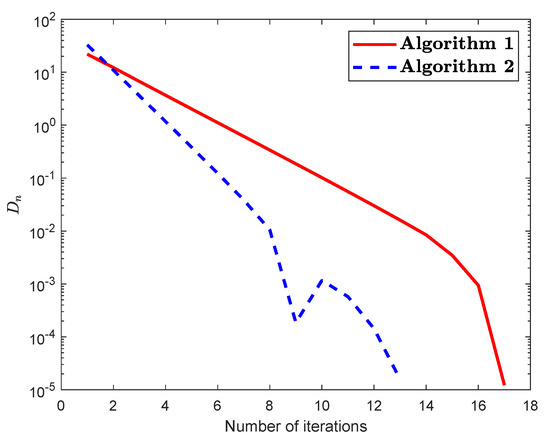
Figure 5.
(For Example 2): Numerical illustration of Algorithm 1 and Algorithm 2 while .
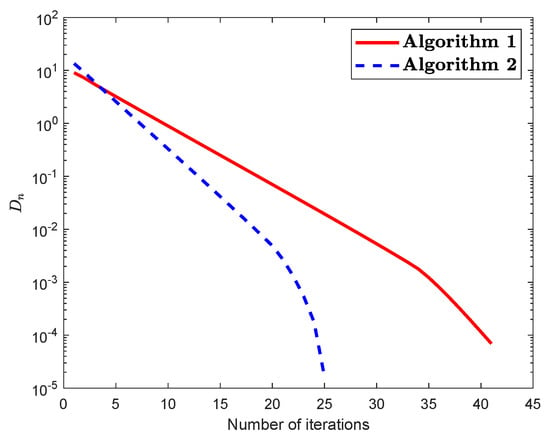
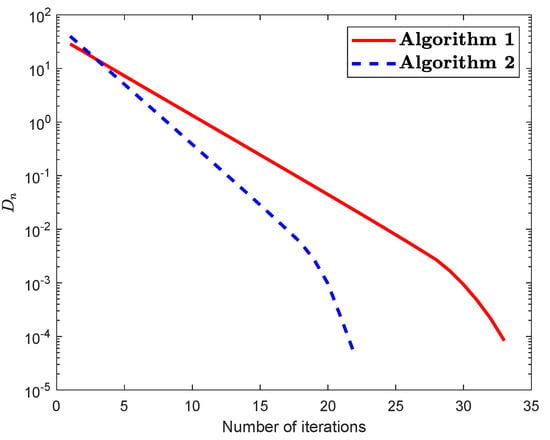
Figure 6.
(For Example 2): Numerical illustration of Algorithm 1 and Algorithm 2 while .
Example 3.
Let be a mapping defined by
Then P is non-expansive and has a unique fixed point The set A is defined by The control condition for both algorithms are taken as follows:
- Algorithm 1
- Algorithm 2
Figure 7.
(For Example 3):Numerical illustration of Algorithm 1 and Algorithm 2 while .
Figure 8.
(For Example 3): Numerical illustration of Algorithm 1 and Algorithm 2 while .
Example 4.
Let be an operator and the variational inequality problem is defined in the following way:
Assume that is a mapping defined by where and L is the Lipschitz constant of the mapping Consider the constraint set A described by and the mapping evaluated by
Table 5.
Example 4: Numerical illustration of Algorithm 1 while .
Table 6.
Example 4: Numerical illustration of Algorithm 2 while .
- Algorithm 1
- Algorithm 2
6. Conclusions
In the subject of algorithms, the effectiveness of the algorithm is measured by two main factors. The first is reaching the desired point with the fewest iterations possible, and the second factor is the time. When the taken time to obtain strong convergence is short, results are good. There is no doubt that the paper [42] addressed many algorithms and proved, under symmetrical conditions, that its algorithm accelerates better than the previous one. Based on previous tables and pictures, we were able to verify that our algorithm converges faster than the algorithm from [42], so it converges faster than all the algorithms included in the paper [42]. Additionally, the numerical results (tables and images) show that our algorithm needs fewer iterations in a short time to achieve the desired goal, and this is what makes our method successful in obtaining strong convergence to the fixed point from its symmetrical one in the previous literature.
Author Contributions
H.A.H. contributed in conceptualization, investigation, methodology, validation and writing the original draft; H.u.R. contributed in conceptualization writing the original draft; H.A. contributed in funding acquisition, methodology, project administration and writing and editing. All authors contributed equally and significantly in writing this article. All authors have read and agreed to the published version of the manuscript.
Funding
This paper not received any external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing is not applicable to this article as no data sets are generated or analyzed during the current study.
Conflicts of Interest
The authors declare that they have no competing interests concerning the publication of this article.
Abbreviations
| HSs | Hilbert spaces |
| CCS | convex closed subset |
| FPs | Fixed points |
| NEMs | Non-expansive mappings |
| MIPs | Monotone inclusion problems |
| VIPs | Variational inequality problems |
| MM | Maximal monotone |
| ISM | Inverse strongly monotone |
| BDF | backward differentiation formula |
References
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: Berlin, Germany, 2011. [Google Scholar]
- Bauschke, H.H.; Borwein, J.M. On projection algorithms for solving convex feasibility problems. SIAM Rev. 1996, 38, 367–426. [Google Scholar] [CrossRef]
- Chen, P.; Huang, J.; Zhang, X. A primal-dual fixed point algorithm for convex separable minimization with applications to image restoration. Inverse Probl. 2013, 29, 025011. [Google Scholar] [CrossRef]
- Picard, E. Memoire sur la theorie des equations aux derivees partielles et la methode des approximations successives. J. Math. Pures Appl. 1890, 6, 145–210. [Google Scholar]
- Halpern, B. Fixed points of nonexpanding maps. Bull. Amer. Math. Soc. 1967, 73, 957–961. [Google Scholar] [CrossRef]
- He, S.; Yang, C. Boundary point algorithms for minimum norm fixed points of nonexpansive mappings. Fixed Point Theory Appl. 2014, 2014, 1–9. [Google Scholar] [CrossRef]
- An, N.T.; Nam, N.M.; Qin, X. Solving k-center problems involving sets based on optimization techniques. J. Global Optim. 2020, 76, 189–209. [Google Scholar] [CrossRef]
- Liu, L. A hybrid steepest descent method for solving split feasibility problems involving nonexpansive mappings. J. Nonlinear Convex Anal. 2019, 20, 471–488. [Google Scholar]
- Hammad, H.A.; Rehman, H.U.; la Sen, M.D. Advanced Algorithms and common solutions to variational inequalities. Symmetry 2020, 12, 1198. [Google Scholar] [CrossRef]
- Combettes, P.L.; Wajs, V.R. Signal recovery by proximal forward–backward splitting. Multiscale Model. Simul. 2005, 4, 1168–1200. [Google Scholar] [CrossRef]
- Douglas, J.; Rachford, H.H. On the numerical solution of the heat conduction problem in 2 and 3 space variables. Trans. Am. Math. Soc. 1956, 82, 421–439. [Google Scholar] [CrossRef]
- Ansari, Q.H.; Islam, M.; Yao, J.C. Nonsmooth variational inequalities on Hadamard manifolds. Appl. Anal. 2020, 99, 340–358. [Google Scholar] [CrossRef]
- Chang, S.S.; Wen, C.F.; Yao, J.C. Common zero point for a finite family of inclusion problems of accretive mappings in Banach spaces. Optimization 2018, 67, 1183–1196. [Google Scholar] [CrossRef]
- Dang, Y.; Sun, J.; Xu, H. Inertial accelerated algorithms for solving a split feasibility problem. J. Ind. Manag. Optim. 2017, 13, 1383–1394. [Google Scholar] [CrossRef]
- Hammad, H.A.; Rehman, H.U.; la Sen, M.D. Shrinking projection methods for accelerating relaxed inertial Tseng-type algorithm with applications. Math. Probl. Eng. 2020, 2020, 14. [Google Scholar] [CrossRef]
- Boţ, R.I.; Csetnek, E.R.; Meier, D. Inducing strong convergence into the asymptotic behaviour of proximal splitting algorithms in Hilbert spaces. Optim. Methods Softw. 2019, 34, 489–514. [Google Scholar] [CrossRef]
- Noeiaghdam, S.; Araghi, M.A.F. A novel approach to find optimal parameter in the homotopy-regularization method for solving integral equations. Appl. Math. Inf. Sci. 2020, 14, 1–8. [Google Scholar]
- Tikhonov, A.N. Regularization of incorrectly posed problems, Soviet Mathematics Doklady. Sov. Math. Dokl. 1963, 4, 1624–1627. [Google Scholar]
- Tikhonov, A.N. On the Solution of Incorrectly Posed Problem and the Method of Regularization. Sov. Math. 1963, 4, 1035–1038. [Google Scholar]
- Attouch, H. Viscosity solutions of minimization problems. SIAM J. Optim. 1996, 6, 769–806. [Google Scholar] [CrossRef]
- Sahu, D.R.; Yao, J.C. The prox-Tikhonov regularization method for the proximal point algorithm in Banach spaces. J. Global Optim. 2011, 51, 641–655. [Google Scholar] [CrossRef]
- Zheng, K.; Qiao, Z.; Cheng, W. A third order exponential time differencing numerical scheme for no-slope-selection epitaxial thin film model with energy stability. J. Sci. Comput. 2019, 81, 154–185. [Google Scholar] [CrossRef]
- Feng, W.; Wang, C.; Wise, S.M.; Zhang, Z. A second-order energy stable backward differentiation formula method for the epitaxial thin film equation with slope selection. Numer. Methods Partial. Differ. 2018, 34, 1975–2007. [Google Scholar] [CrossRef]
- Yan, Y.; Chen, W.; Wang, C.; Wise, S.M. A second-order energy stable BDF numerical scheme for the Cahn-Hilliard equation. Commun. Comput. Phys. 2018, 23, 572–602. [Google Scholar] [CrossRef]
- Wang, C.; Chen, W.; Li, W.; Luo, Z.; Wang, X. A stabilized second order exponential time differencing multistep method for thin film growth model without slope selection. Esaim Math. Model. Numer. 2019, 54, 727–750. [Google Scholar] [CrossRef]
- Meng, X.; Qiao, Z.; Wang, C.; Zhang, Z. Artificial regularization parameter analysis for the no-slope-selection epitaxial thin film model. CSIAM Trans. Appl. Math. 2020, 1, 441–462. [Google Scholar] [CrossRef]
- Chen, W.; Wang, C.; Wang, X.; Wise, S.M. A linear iteration algorithm for a second-order energy stable Scheme for a thin film model without slope selection. J. Sci. Comput. 2014, 59, 574–601. [Google Scholar] [CrossRef]
- Cheng, K.; Wang, C.; Wise, S.M.; Yue, X. A second-order, weakly energy-stable pseudo-spectral scheme for the Cahn–Hilliard equation and its solution by the homogeneous linear iteration method. J. Sci. Comput. 2016, 69, 1083–1114. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Dong, Q.L.; Lu, Y.Y.; Yang, J. The extragradient algorithm with inertial effects for solving the variational inequality. Optimization 2016, 65, 2217–2226. [Google Scholar] [CrossRef]
- Fan, J.; Liu, L.; Qin, X. A subgradient extragradient algorithm with inertial effects for solving strongly pseudomonotone variational inequalities. Optimization 2020, 69, 2199–2215. [Google Scholar] [CrossRef]
- Shehu, Y.; Li, X.H.; Dong, Q.L. An efficient projection-type method for monotone variational inequalities in Hilbert spaces. Numer. Algorithm 2020, 84, 365–388. [Google Scholar] [CrossRef]
- Tan, B.; Xu, S.; Li, S. Inertial shrinking projection algorithms for solving hierarchical variational inequality problems. J. Nonlinear Convex Anal. 2020, 21, 871–884; 2193–2206. [Google Scholar]
- Maingé, P.E. Convergence theorems for inertial KM-type algorithms. J. Comput. Appl. Math. 2008, 219, 223–236. [Google Scholar] [CrossRef]
- Dong, Q.L.; Yuan, H.B.; Cho, Y.J.; Rassias, T.M. Modified inertial Mann algorithm and inertial CQ-algorithm for nonexpansive mappings. Optim. Lett. 2018, 12, 87–102. [Google Scholar] [CrossRef]
- Tuyen, T.M.; Hammad, H.A. Effect of shrinking projection and CQ-methods on two inertial forward–backward algorithms for solving variational inclusion problems. Rend. Del Circ. Mat. Palermo Ser. 2 2021, 1–15. [Google Scholar] [CrossRef]
- Hammad, H.A.; Rahman, H.U.; Gaba, Y.U. Solving a split feasibility problem by the strong convergence of two projection algorithms in Hilbert spaces. J. Funct. Spaces 2021, 2021, 5562694. [Google Scholar]
- Berinde, V. Iterative Approximation of Fixed Points; Efemeride: Baia Mare, Romania, 2002. [Google Scholar]
- Takahashi, W. Nonlinear Functional Analysis; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Xu, H.K. Iterative algorithms for nonlinear operators. J. Lond. Math. Soc. 2002, 66, 240–256. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Tan, B.; Cho, S.Y. An inertial Mann-like algorithm for fixed points of nonexpansive mappings in Hilbert spaces. J. Appl. Numer. Optim 2020, 2, 335–351. [Google Scholar]
- Lehdili, N.; Moudafi, A. Combining the proximal algorithm and Tikhonov regularization. Optimization 1996, 37, 239–252. [Google Scholar] [CrossRef]
- Sahu, D.R.; Ansari, Q.H.; Yao, J.C. The prox-Tikhonov-like forward-backward method and applications. Taiwanese J. Math. 2015, 19, 481–503. [Google Scholar] [CrossRef]
- Kikuchi, N.; Oden, J.T. Contact Problems in Elasticity; SIAM: Philadelphia, PA, USA, 1988. [Google Scholar]
- Dafermos, S. Exchange price equilibria and variational inequalities. Math. Program. 1990, 46, 391–402. [Google Scholar] [CrossRef]
- Bertsekas, D.P.; Gafni, E.M. Projection methods for variational inequalities with applications to the traffic assignment problem. Math. Prog. Study 1982, 17, 139–159. [Google Scholar]
- Harker, P.T. Predicting Zntercity Freight Flows; VNU Science Press: Utrecht, The Netherlands, 1987. [Google Scholar]
- Baiocchi, C.; Capelo, A. Variational and Quasi-Variational Inequalities; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Shatanawi, W.; Bataihah, A.; Tallafha, A. Four-step iteration scheme to approximate fixed point for weak contractions. Comput. Mater. Contin. 2020, 64, 1491–1504. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).