1. Introduction
While a crucial property of complex numbers
is very briefly described by the equation
, the numbers
considered in the present work have the fundamental property
. The basic aid for establishing this property consists in the use of suitable coordinates and the appropriate handling of rotations on spheres in the space
Such rotations are often described in terms of three angles, of which the best known by name are probably the Euler angles. Another coordinate system that is widely used to describe the position of points on spheres in
is that of the so-called spherical coordinates with a fixed radius variable which only makes use of two angles. Two other important advantages of these coordinates are that they allow systematic generalizations to spheres of very general shape and to higher dimensions. This will be outlined in detail and additionally discussed in
Section 5.2 and
Section 6, respectively.
There are natural applications of spherical coordinates, for example in geomathematics. These and various other types of coordinates, and sometimes even more efficiently complex numbers and their multivariate extensions, are also used, e.g., in robot and satellite positioning systems and play a substantial role in directional distribution theory, see, e.g., [
1,
2]. Here we give an application of random three-complex numbers to the construction of a new class of directional probability distributions. Their simulation, an important aid of artificial intelligence, is also developed here. Coordinates are studied in a widespread literature, see, e.g., [
3]. Complex numbers were introduced for a broad readership from theory and practice in various modifications of a classic standard way and with slightly different emphases of several aspects. Introductions to complex numbers showing their close connections to vectors and geometry, in particular coordinate geometry, can be found in, e.g., [
4,
5,
6,
7]. Readers more interested in a strongly formal approach to mathematics may further prefer books like [
8,
9] while those who prefer the view point of engineers might further enjoy books like [
10,
11]. The book [
12] is not a mathematics text but instead discusses complex numbers for a broad readership, among other number systems. Hyper-complex numbers, that is generalizations and modifications of complex numbers such as Clifford modules, Clifford algebras, spinors, quaternions, octonions, hyperbolic-complex and split-complex numbers, in part together with their far reaching applications to physics and electrical engineering, have been studied by several authors in, e.g., [
13,
14,
15,
16,
17,
18,
19]. Not all properties of complex numbers are still valid in these variations of complex numbers, such as for example the commutativity of multiplication.
Exploiting suitably chosen coordinates, hyper-complex numbers in arbitrary finite dimensions are introduced in [
20]. For tricomplex numbers
inter alia considered there, the associative and commutative multiplication rules for the so called hypercomplex bases
h and
k are
The addition of tricomplex numbers is defined component-wise and the multiplication of
and
by
As a result, two of three coordinates assigned to a tricomplex number are multiplicative quantities and the third is an additive quantity upon the multiplication of tricomplex numbers.
The approach to complex numbers in dimension three chosen in the present paper is different in that, vice versa, two of three coordinates assigned to a three-complex number are additive quantities and the third is a multiplicative quantity upon the multiplication of three-complex numbers. For a multivariate extension of the system of hyperbolic complex numbers we refer to [
21].
Whenever one tries to generalize a mathematical term that is reasonably defined in two dimensions to three dimensions one clearly has different possibilities. One has to decide which of the properties or interpretations that apply in dimension two should remain valid in dimension three, in a certain sense. The focus of the present work is on maintaining the geometric interpretation of the multiplication rule from dimension two. If
denote usual complex numbers then the real and imaginary parts of their product
may be interpreted as the components of a geometric vector product in the two-dimensional Euclidean vector space
,
The implementation of such an approach in three dimensions is the subject of the present work. For three-complex numbers or complex numbers in dimension three,
where
and
are real numbers and
i and
j are called imaginary units, we introduce in the usual notation for complex numbers the associative and commutative addition rule
and for
the multiplication rule
Here, using indicator functions, the sign function
is defined as
with
meaning principle values of the arctangent which are between zero and
. For
we put
This multiplication rule is associative due to its geometric meaning, is commutative because of its symmetric structure and has the homogeneity property
and the additive and multiplicative “negative-inverse” (see
Section 2) elements of
are given by
and
respectively. It is most easily seen from the geometric point of view developed in
Section 4 that the operations of addition and multiplication are distributive. Differently from what is expressed in Equation (
1), the two imaginary units
i and
j satisfy
and, adapting the spirit of Euler’s trigonometric representation of complex numbers, the following equations hold:
as well as
Thus, the most typical complex number properties also apply to three-complex numbers. However, the exponential type function
still needs to be suitably defined, and, as is customary in the usual introductions to complex numbers, so far no mathematical meaning has been assigned to the formal or “imaginary” symbols
as well as
and
. The rest of the article is structured as follows. To overcome the just mentioned “imaginary” or “alchemical” aspects of this introduction, we present a completely formally correct mathematical introduction to these three-complex numbers in
Section 2 and extend this approach in
Section 5.1 by introducing the more general notion of a corresponding three-complex algebraic structure. (This is not a polemic against alchemy in general, which is associated with two well-known names in the city of Meissen where I grew up. The interested reader may find more on “mathematical alchemy” in “Why an unsolved problem in mathematics matters” by Marcus du Sautoy, Fourth Estate, London 2003.)
Section 3 and
Section 4 in between are devoted to an application of the new Euler-type formulas to the construction of directional probability laws and to a geometric view of the present topic, respectively.
Section 5.2 deals with
-complex numbers,
thus generalizing
Section 2 and
Section 4 with respect to the parameter
and the work in [
22] with respect to dimension three. A discussion in
Section 6 finishes the paper.
2. Three-Complex Numbers
Let be the three-dimensional Euclidean space, the standard orthonormal basis representation of with , and where the common vector addition. Then is an Abelian group with the neutral element and the additive inverse element of is .
Definition 1. the geometric vector product of and is defined by ) with and as in (5) and (6), respectively, and where Moreover, we put Definition 2. The k-th geometric power of vector and its complex exponential are defined as and , respectively.
Remark 1. For the sake of simplicity, we did not introduce a notation like or instead of .
Example 1. for .
Example 2. Further particular multiplication results are and
Comparing Equations (
1) and (
15) reveals major differences between tricomplex and three-complex numbers.
Remark 2. Let λ be a real number and its sign, then which means that the geometric vector product is positive but not negative homogeneous.
Example 3. For we define where denotes the Euclidean norm of vector . Then in general. Thus, is not a multiplicative inverse of but might be considered as a ’negative-inverse of ’ (which does not mean “negative multiplicative inverse”). Moreover, Definition 3. We speak of with the additive and multiplicative neutral elements and , respectively, and with elements i and j satisfying (15) as of the space of three-dimensional, three-complex or -complex numbers. Remark 3. Let . The maps are invariant with respect to the Euclidean norm, .
Definition 4. the geometric vector ratio, devided by , is defined by where .
Remark 4. The term division algebra is directly related to the common vector product. With regard to the present results, one could think about a generalization of the notion of division algebra in the sense of allowing the present vector product to play the role of the common vector product. As the present odd-dimensional result shows, the existence of finite dimensional such division algebras over then would not be restricted to dimensions one, two, four or eight as is the case if the common vector product is used, see [23,24,25]. Theorem 1. The following analogs to and extensions of Euler’s trigonometric representation of complex numbers are true: Proof. By definition of the geometric vector power and geometric vector exponential functions, we have
Rearranging terms in an obvious manner gives
proving the first formula in (
19), and the second one follows in the same way. Moreover, with
and
as in Remark 3,
Proving the last formula in Equation (
19) can be done again using the multiplication rule
, but it will be considerably easier to use a geometrically motivated reformulation of this rule given in
Section 4. □
It follows from this theorem that
allows the representation
The third equation in (
19) might be considered as “the” three-dimensional generalization of Euler’s trigonometric representation of complex numbers and the last equation in Theorem 1 gives rise to the particular formula
In common complex number writing, this would be read as
3. Directional Probability Laws
This section deals with a method of constructing probability distributions on the Euclidean unit sphere
in the three-dimensional Euclidean space
This method makes substantial use of the third formula in Equation (
19). Let
denote a probability space and
a random vector defined on it. The random three-complex number
takes its values on
and allows each of the following representations
and
Equation (
23) is due to the third Euler-type formula in (
19), and (
24) corresponds to the spherical coordinate transformation when the radius variable is equal to one.
The random vector
can be considered as the central projection of
onto the unit circle
in
. If
follows a spherical distribution law then
U is uniformly distributed on
. The role of the angular variable
in Equation (
24) is taken over by the radius variable
in (
23),
Wrapped random variables of the type
and their characteristic functions are put in relation to ordinary complex numbers in [
2]. We act here in a certain way the other way around, and using three-complex numbers. To get to the point, we use the Euler-type Equation (
19) for establishing a principle for constructing certain directional probability distributions. For the wrapped Student distribution and a general approach for obtaining wrapped circular distributions via mixtures we refer to [
26,
27], respectively.
In case
has a two-dimensional normal distribution
with expectation
and covariance matrix
, that of
U has been called projected normal or angular Gaussian or offset normal distribution in [
2], and that of
is a wrapped non-central Chi-square distribution. In case
follows a spherical distribution law with a density generating function
g, see, e.g., [
28,
29,
30], the variables
U and
are stochastically independent and
is distributed according to a
g-generalized Chi-square distribution. Thus the distribution of
can be simulated based upon independently simulating
U and
R. The resulting directional distribution on
will be called uniform-wrapped-
(
g)-distribution.
4. Geometric View
Let
. A well known way to define a spherical coordinate transformation
is to put
This transformation is a.e. invertible with the inverse transformation
, allowing the representations
and, for
Example 4. The transformations and give the following particular results: Definition 5. The spherical coordinate product of the vectors , is defined as Theorem 2. The spherical coordinate product of the vectors according to Definition 5 coincides with their geometric vector product according to Definition 1.
Proof. According to Definition 5, the spherical coordinate product of the two vectors
and
equals
Because of the relationships
and
for
, and with a view to the fact that the sine and cosine functions are
periodic, we have that
with
and where
proving that (
25) and (
12) describe the same multiplication. □
Remark 5. The geometric vector product is associative and commutative and the addition and multiplication are distributive.
Remark 6. Because for all ϑ, for uniqueness we put .
Example 5. The multiplication results from Example 2 can be read in the present notation as Remark 7. One might prefer to express the equations in Example 5 in the usual complex number writing as in (8). However, neither the imaginary units nor their products or squares would then be reasonably mathematically explained. A multiplication rule assigning a strong mathematical meaning to Equation (8) is consequently given by the operation ⊙ in (12) or * in (25), which is, however, not a priori obvious. Remark 8. The spherical coordinate multiplication defines the identical map, the map enlarges the angle between and by , and the map both enlarges the angle between and by and additionally defines a -rotation around the axis spanned by .
Remark 9. The space of three-complex numbers may alternatively be represented as , having elements satisfying the equations in (15) and in Example 5. Remark 10. If then , thus (16), explaining Example 3 from a geometric point of view. Definition 6. The spherical coordinate ratio, vector divided by the vector , is defined as Theorem 3. The spherical coordinate ratio of the vectors according to Definition 6 coincides with their geometric vector ratio according to Definition 4.
Proof. The proof of this theorem is quite similar to that of Theorem 2 and therefore is omitted here. □
5. A General Three-Complex Algebraic Structure
Definition 7. Let be a non-empty set, , and as well as commutative and distributive operations such that and are Abelian groups where the existence of a multiplicative inverse element is replaced with the existence of a negativ-inverse multiplicative element and with neutral elements and , respectively. If further there exist elements and from satisfyingthen will be called a three-complex or -complex algebraic structure. We recall that ordinary complex numbers may be considered as elements of the two-dimensional Euclidean space
and that their addition may be understood as the vector addition in
and their multiplication as the geometric vector multiplication, defined according to (
3), see [
22]. Due to Euler’s trigonometric representation of complex numbers, the Euclidean unit circle in
plays an important role. For the case that the Euclidean unit circle of the space
is replaced with the more general
-unit circle, the classes of
-complex numbers,
, are introduced in [
22]. With this in mind, we also refer to ordinary complex numbers as to
-complex numbers and to the
-complex numbers as to
-complex numbers. Similarly,
Section 5.1 deals with
-complex structures and
Section 5.2 is devoted to a three-dimensional extension of the
-complex numbers which will be called
-complex numbers. In particular, matrix, polynomial and variable basis representations of the abstract structure introduced in Definition 7 are considered in
Section 5.1.
5.1. On -Complex Structures
In this section, we deal with complex structures whose multiplication rule is closely related to that introduced in Definition 1.
Example 6. Matrix representation of three-complex numbers.
be the set of matrices of the type With ⊕ denoting the common matrix addition, is an Abelian group having the neutral element . The matrices are linear independent and is an orthonormal basis of the space with respect to the standard scalar product Making use of formulae (5) and (6), let the geometric matrix product of and from be defined by where is defined according to Formula (12) with . In this sense, some selected multiplication results are The multiplicative neutral element is that is for all Note that is an Abelian group where the existence of a multiplicative inverse element is replaced with the existence of a negativ-inverse multiplicative element and is a three-complex algebraic structure which will be called a matrix representation of the three-complex numbers from Section 2. We are going now to additionally give a geometric interpretation of the geometric matrix multiplication rule. The scalar product generates the norm and the unit sphere of the space with respect to this norm is With the set M introduced at the beginning of Section 4, we define the map by Particular transformation results are then The map is a.e. invertible. For uniqueness, we put and . For we have that The subspace spanned by , , is called the polar axis of the space . Due to the representation we have that where . According to transformation , As to summarize, while φ describes the angle between and ϑ describes the angle between the projections of onto the axis spanned by and onto the plane spanned by and , respectively.
Let the spherical coordinate product of the matrices be defined by with symbols ⋄ and ▹ as in Definition 5. Because the sin and cos functions are periodic, . Moreover, where the sign function is defined according to (5) and (6). Following further the proof of Theorem 2 it becomes visible that the spherical coordinate matrix product becomes converted to the geometric matrix product which is given by (29). Remark 11. Clearly, any orthonormal basis of could be used instead of .
Example 7. Polynomial representation of three-complex numbers.
For each , let denote the polynomial and let the usual polynomial addition ⊕ be defined in the set of all polynomials of degree two, Then is an Abelian group with neutral element where The set of monomials and is an orthonormal basis of with respect to the standard scalar product If we define the geometric product of the polynomials by with being defined according to (12) where , then the space is a three-complex algebraic structure with the map being the identical map, and the following multiplication rules hold This structure will also be called a polynomial representation of the three-complex numbers from Section 2. To additionally follow now the geometric view, let be the unit sphere of the space with respect to the norm Similarly to Example 6, we define the map by Following further the line of Example 6 for defining the spherical coordinate product of two polynomials, we observe that this product coincides with the geometric product.
Example 8. Variable basis representation of three-complex numbers. The space of three-complex numbers dealt with in Section 2 and Section 4 has been proved to be a particular three-complex algebraic structure. Here, we study the influence another choice of the basis of has on this three-complex algebraic structure. To this end let, e.g., the vectors denote an orthonormal basis w.r.t. the standard scalar product in . Moreover, let denote the corresponding basis representation of an element from and denote the set of all such vectors by Then is a three-complex algebraic structure if + means usual vector addition and the geometric product of the vectors is defined (if not for at least one value of ) by In this case, with and one has Clearly, can be any orthonormal basis of possibly playing a distinguished role in a certain technical application.
5.2. Classes of -Complex Numbers
In this section, we deal with a complex structure where the multiplication rule is closely related to that introduced in [
22]. To be more specific, we define
p-generalizations of the three-complex numbers studied in
Section 2 and
Section 4,
and at the same time extend the work in [
22] to dimension three.
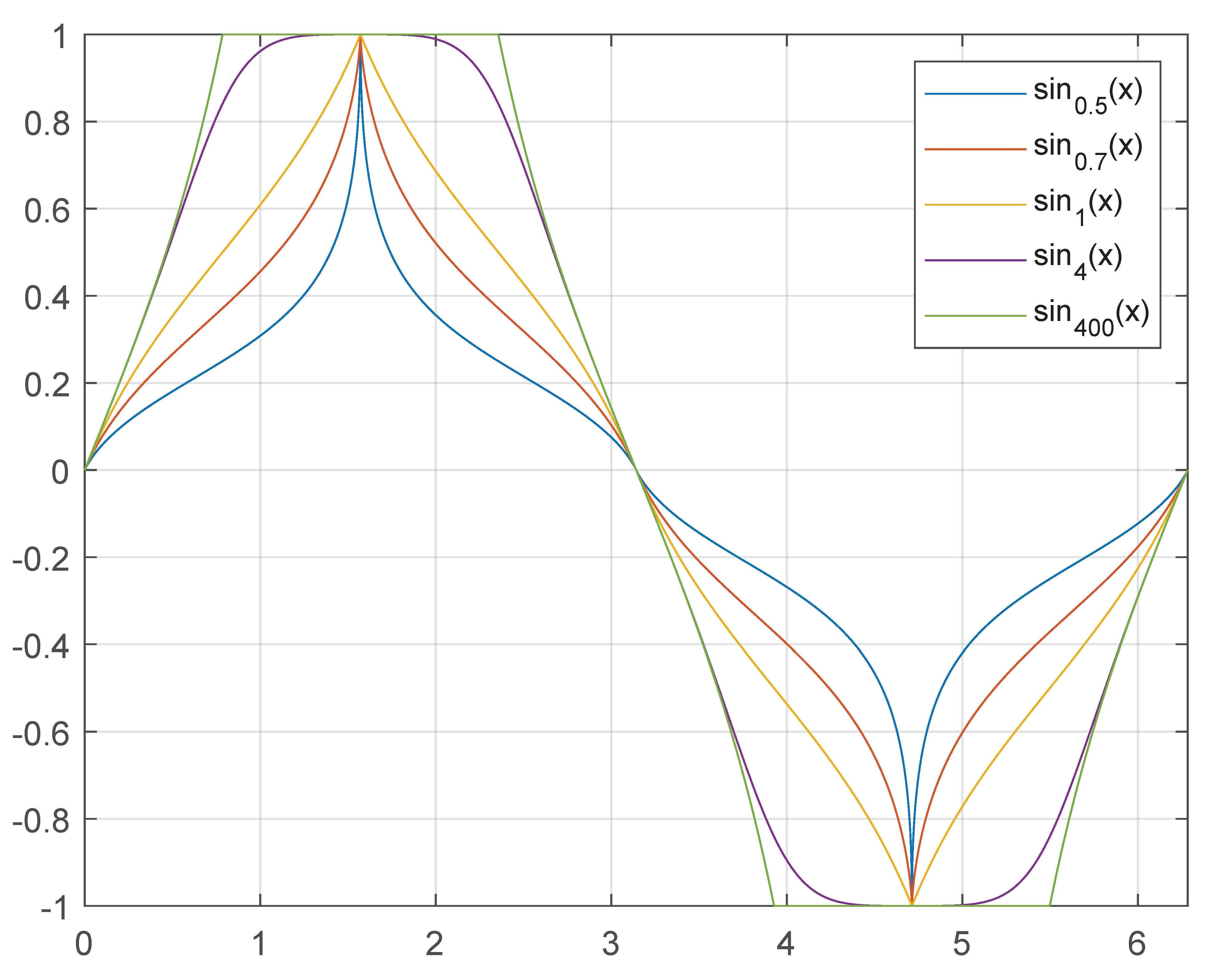
Definition 8. the geometric vector p-product of and is defined bywith S defined according to (5) and (6), and where and . Moreover, we put Remark 12. Equation (15) holds true with ⊙ replaced with . In addition, equation (35) changes into equation (12) if the equation applies. Definition 9. Let We speak of with the additive and multiplicative neutral elements and , respectively, and with elements and satisfying (15) where ⊙ is replaced with as of the space of -complex numbers. We turn now to a geometric view of this space. To this end, let
and
be the
-sine and
-cosine functions, respectively, where
, see [
31] and
Figure 1.
A well known way to define an
-spherical coordinate transformation
is to put
This transformation is a.e. invertible with the inverse transformation
allowing the representations
and, for
Example 9. and the transformations and allow the following particular results: Definition 10. The spherical coordinate p-product of the vectors , is defined as where and are defined as in Definition 5.
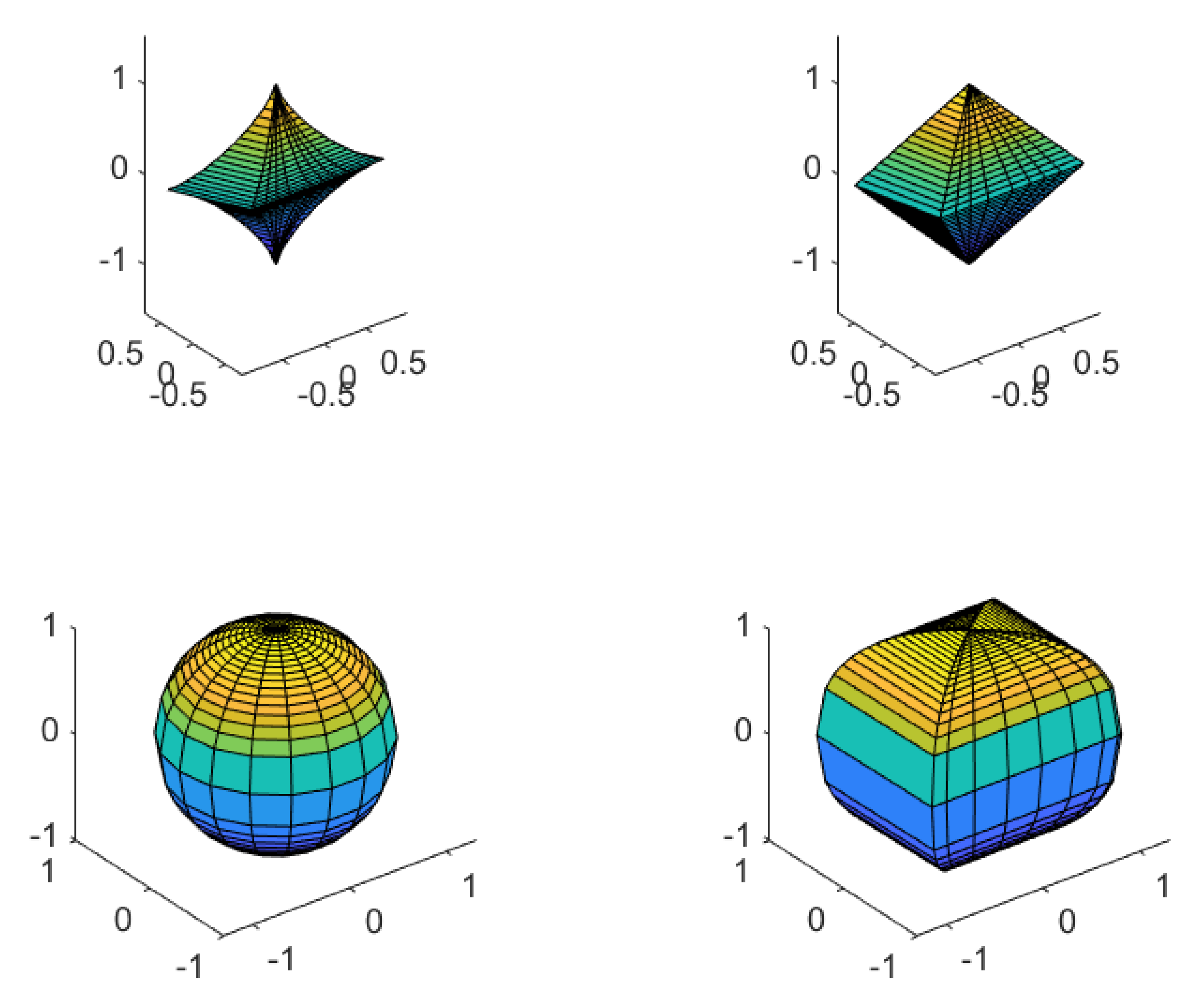
We recall that multiplying two complex numbers which have the absolute value one means adding their angles in the trigonometric representation. According to Definition 10, the spherical
p-multiplication of two three-complex numbers whose
p-generalized radius variables have the value one is attributed to the pair-wise addition of their
- and
-angles, which can be imagined as a rotation-like movement on the
p-unit sphere. Such spheres are visualized in
Figure 2. A change in the angle
causes a movement along a longitude and a change in the angle
causes a movement along a latitude.
Theorem 4. The spherical coordinate p-product of the vectors according to Definition 10 coincides with their geometric vector p-product according to Definition 8.
Proof. According to Definition 10, the spherical coordinate
p-product of the vectors
equals
where
means the diagonal matrix having diagonal elements
Let
Because of the relationships
and
for
, and with a view to the fact that the sine and cosine functions are
periodic, as in the proof of Theorem 2, we have that
Moreover,
This finally proves that (
35) and (
37) describe the same multiplication. □
6. Discussion
Many authors declare complex numbers as a completion of the real numbers system by adding to it an abstract or imaginary quantity. One or the other reader is left then with the question of what it means, mathematically or philosophically, that a well-defined real number and a multiple of the undefined quantity
are combined with each other by an undefined addition sign,
. There is no such gap of presentation in the present paper because all items dealt with here are introduced by strong mathematical definitions. For example, the meaning of all three different addition signs,
and +, in the equation
follows in the present paper from the context of vector(matrix, polynomial) addition, addition of vector sums as elements of an algebraic structure and usual real number addition, respectively. The well known notion of a vector space is consequently used from the very beginning of our present consideration. Answers to the questions with regard to the existence and uniqueness of a three-complex structure therefore follow in a very verifiable way from the present paper. Much of what is done here follows from the properties of the well known spherical, or three-dimensional polar, coordinates, which might be considered as trivial by one or the other reader. On the other hand, this approach opens a broad and far reaching perspective to further generalizations of complex structures in higher dimensions and to spaces having considerably more general unit spheres than the
spheres considered here. A crucial point of the present approach is the introduction of the geometric vector product in dimension three and the equivalent spherical coordinate product in Definitions 1 and 5, respectively. A formula like (
35) or even (
12) may be of little interest if you do not have a computer. This may be one of the reasons why the elementary construction presented here was not carried out earlier.
The present study is a continuation of what was started in [
22]. Thus, a next step of a systematic mathematical study is to look for four-complex numbers, being then likely to be different from quaternions. On the other hand, applications of various types and in different fields mentioned or not in the introduction are to be expected.



{kind=link}
{kind=link}

