Moving Object Detection Using an Object Motion Reflection Model of Motion Vectors

Abstract
1. Introduction
2. The Proposed Method
2.1. Road Estimation
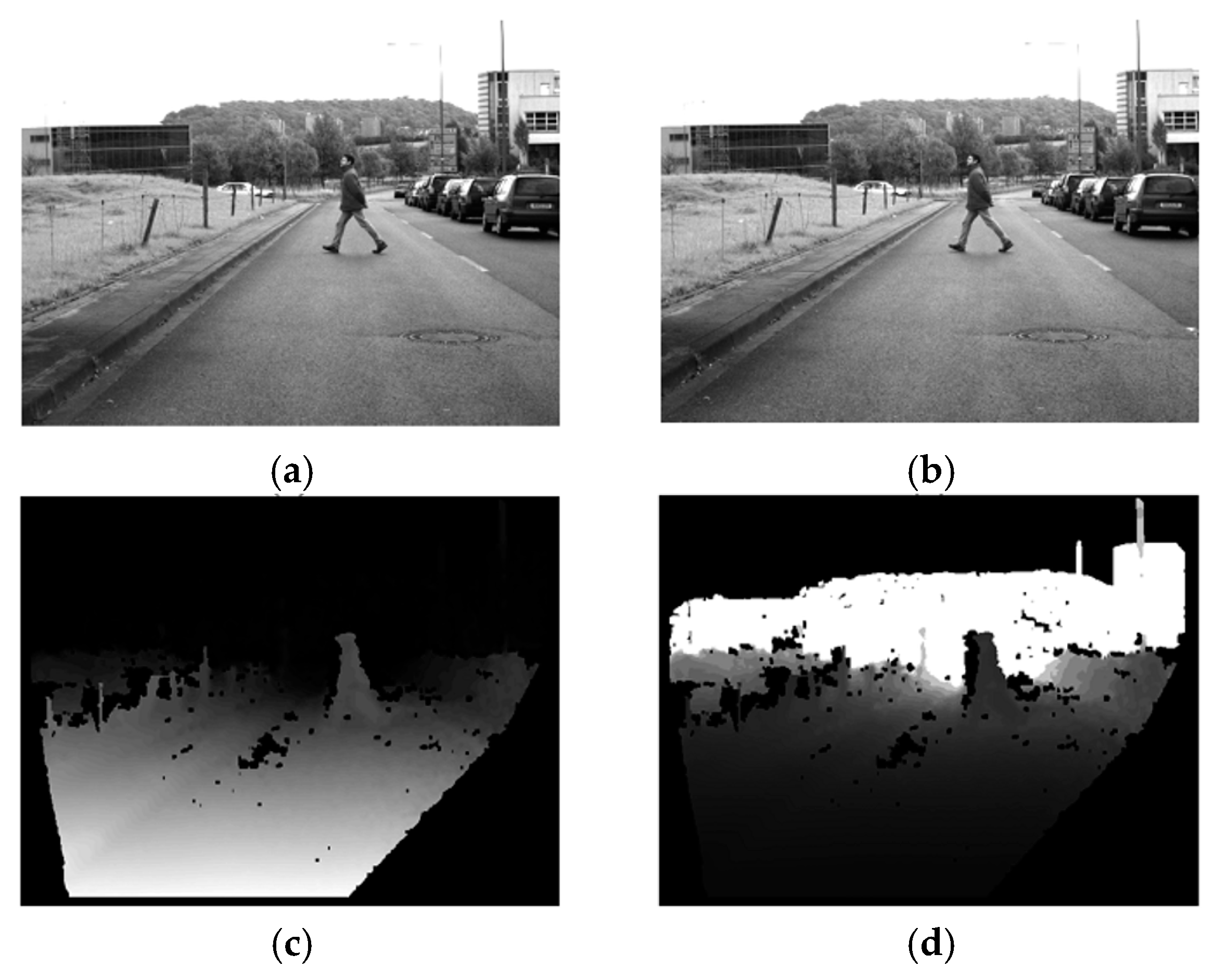
2.2. Depth Map Calculation
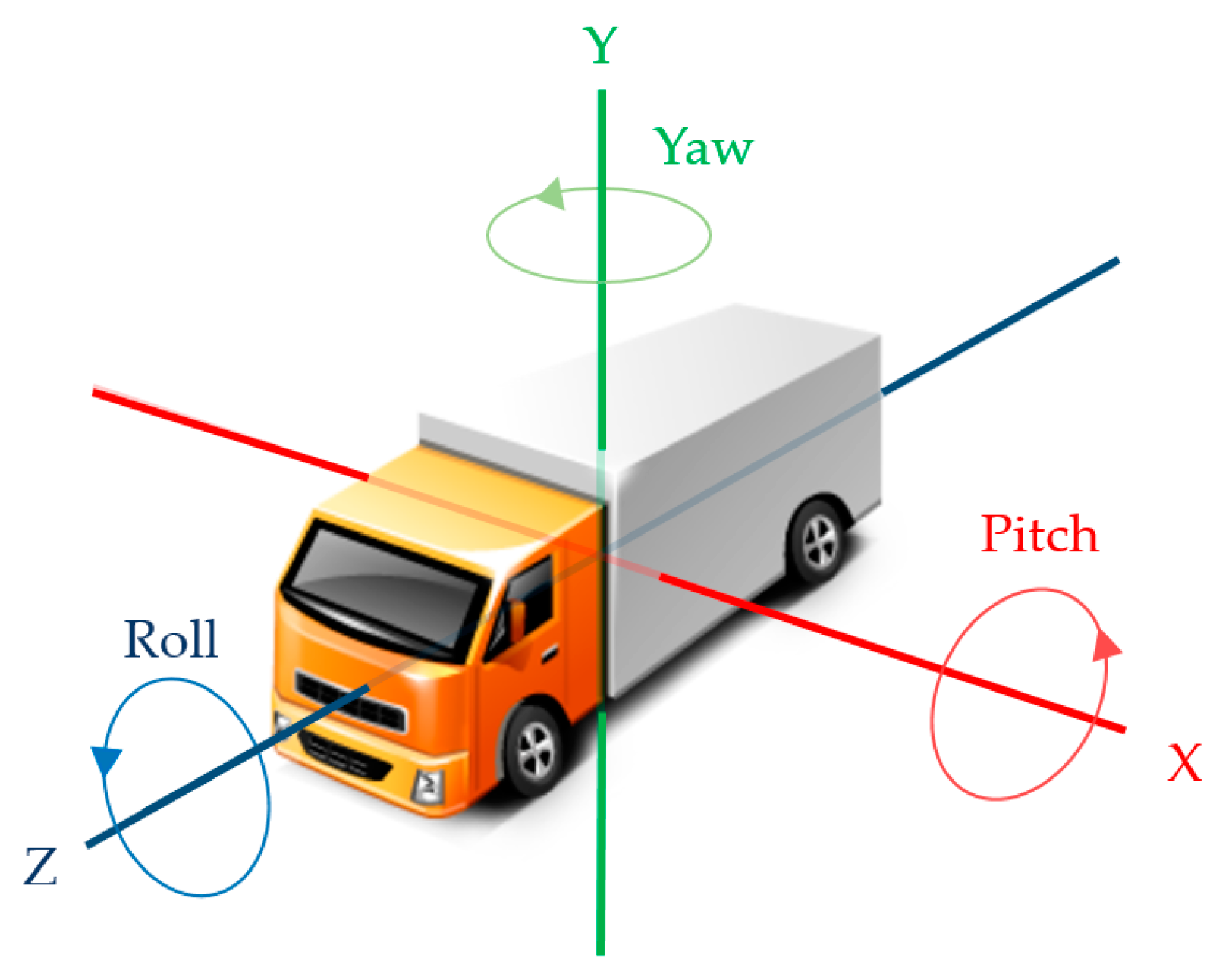
2.3. System Motion Estimation
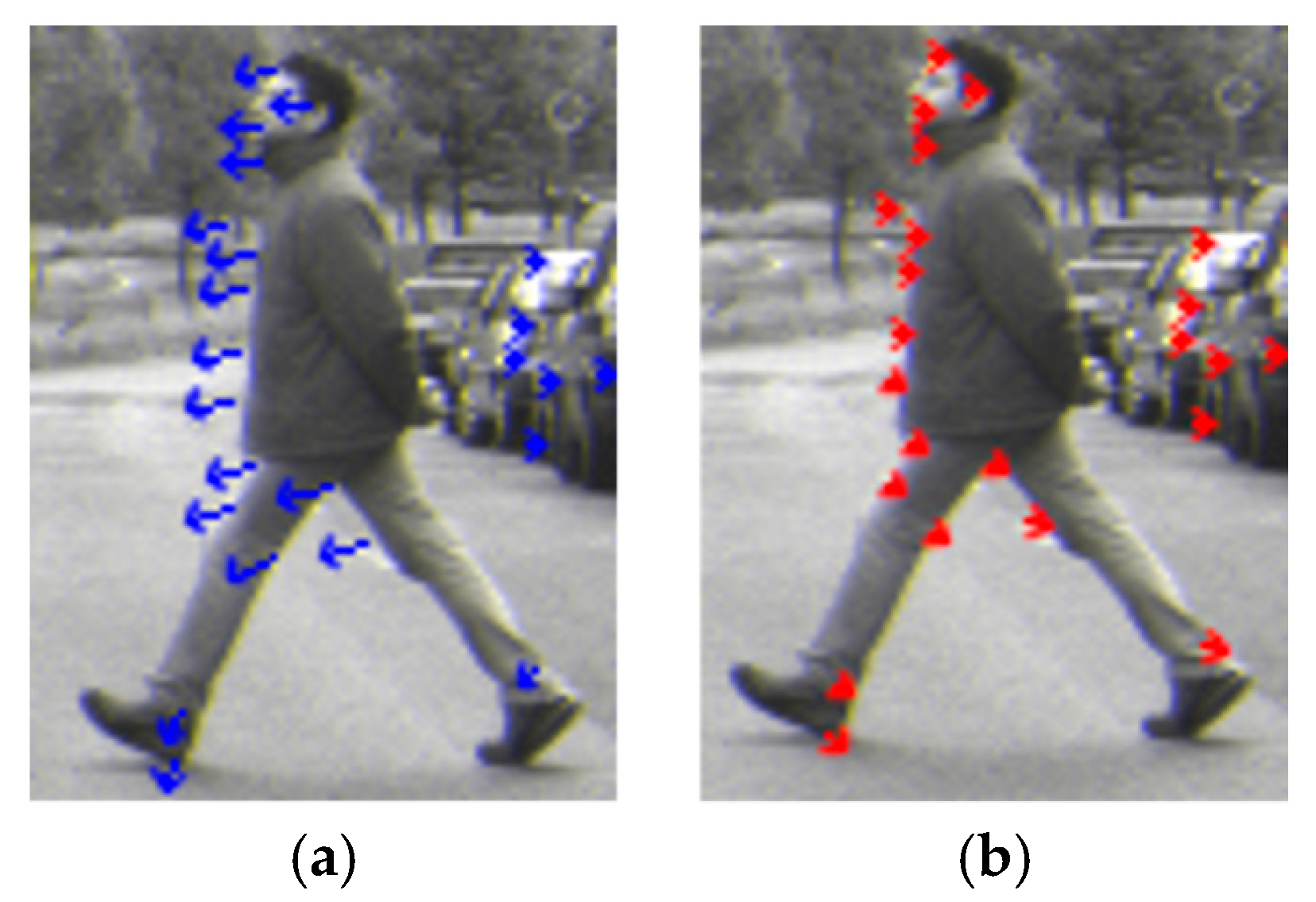
2.4. Moving Object Detection
3. Experimental Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huval, B.; Wang, T.; Tandon, S.; Kiske, J.; Song, W.; Pazhayampallil, J.; Andriluka, M.; Rajpukar, P.; Migimatsu, T.; Cheng-Yue, R.; et al. An empirical evaluation of deep learning on highway driving. arXiv, 2015; arXiv:1504.01716v3. [Google Scholar]
- Gavrila, D.M. Sensor-based pedestrian protection. IEEE Intell. Syst. 2001, 16, 77–81. [Google Scholar] [CrossRef]
- Gopalakrishnan, S. A public health perspective of road traffic accidents. J. Fam. Med. Prim. Care 2012, 1, 144–150. [Google Scholar] [CrossRef] [PubMed]
- Piccardi, M. Background subtraction techniques: A review. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, 10–13 October 2004. [Google Scholar]
- Postica, G.; Romanoni, A.; Matteucci, M. Robust moving objects detection in lidar data exploiting visual cues. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Hariyono, J.; Hoang, V.D.; Jo, K.H. Moving object localization using optical flow for pedestrian detection from a moving vehicle. Sci. World J. 2014, 2014, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Bouguet, J.Y. Pyramidal implementation of the affine lucas kanade feature tracker description of the algorithm. Intel Corp. 2001, 5, 1–10. [Google Scholar]
- Chen, L.; Fan, L.; Xie, G.; Huang, K.; Nuchter, A. Moving-object detection from consecutive stereo pairs using slanted plane smoothing. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3093–3102. [Google Scholar] [CrossRef]
- Kitt, B.; Geiger, A.; Lategahn, H. Visual odometry based on stereo image sequences with ransac-based outlier rejection scheme. In Proceedings of the IEEE Intelligent Vehicles Symposium, San Diego, CA, USA, 21–24 June 2010. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Seo, S.W.; Lee, G.C.; Yoo, J.S. Motion Field Estimation Using U-Disparity Map in Vehicle Environment. J. Electr. Eng. Technol. 2017, 12, 428–435. [Google Scholar] [CrossRef]
- Labayrade, R.; Aubert, D.; Tarel, J.P. Real time obstacle detection in stereovision on non flat road geometry through v-disparity representation. In Proceedings of the IEEE Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2016), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Geiger, A.; Roser, M.; Urtasun, R. Efficient large-scale stereo matching. In Proceedings of the Asian Conference on Computer Vision (ACCV 2010), Queenstown, New Zealand, 8–12 November 2010. [Google Scholar]
- Scharstein, D.; Pal, C. Learning conditional random fields for stereo. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2007), Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Giachetti, A.; Campani, M.; Torre, V. The use of optical flow for road navigation. IEEE Trans. Robot. Autom. 1998, 14, 34–48. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Lawrence Zitnick, C. Microsoft coco: Common objects in context. In Proceedings of the 13th European Conference on Computer Vision (ECCV 2014), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Keller, C.; Enzweiler, M.; Gavrila, D.M. A New Benchmark for Stereo-based Pedestrian Detection. In Proceedings of the IEEE Intelligent Vehicles Symposium, Baden-Baden, Germany, 5–9 June 2011. [Google Scholar]
- Zhou, D.; Frémont, V.; Quost, B.; Dai, Y.; Li, H. Moving object detection and segmentation in urban environments from a moving platform. Image Vis. Comput. 2017, 68, 76–87. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Processing Time (ms) |
|---|---|
| Stereo matching (ELAS [15]) | 73 |
| Road estimation | 1 |
| System motion estimation | 97 |
| Object detection (YOLO [14]) | 17 |
| Moving object detection | 2 |
| Total | 190 |
| Method | Yaw Error (degree/s) |
|---|---|
| The proposed method | 0.00471 |
| Hariyono’s method [6] | 0.00781 |
| Seo’s method [11] | 0.00779 |
| Dataset | Frames | Moving Objects | Static Objects |
|---|---|---|---|
| Daimler dataset | 22,500 | 437 | 794 |
| Our dataset | 12,000 | 240 | 545 |
| Method | True Positive | False Positive | False Negative | Precision | Recall | F-Measure |
|---|---|---|---|---|---|---|
| Proposed method | 220 | 12 | 20 | 0.9483 | 0.9167 | 0.9322 |
| Chen’s method [8] | 207 | 18 | 28 | 0.9200 | 0.8809 | 0.9000 |
| Hariyono’s method [6] | 184 | 25 | 35 | 0.8804 | 0.8402 | 0.8598 |
| Zhou’s method [21] | 231 | 23 | 18 | 0.9094 | 0.9277 | 0.9185 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, J.; Lee, G.-c. Moving Object Detection Using an Object Motion Reflection Model of Motion Vectors. Symmetry 2019, 11, 34. https://doi.org/10.3390/sym11010034
Yoo J, Lee G-c. Moving Object Detection Using an Object Motion Reflection Model of Motion Vectors. Symmetry. 2019; 11(1):34. https://doi.org/10.3390/sym11010034
Chicago/Turabian StyleYoo, Jisang, and Gyu-cheol Lee. 2019. "Moving Object Detection Using an Object Motion Reflection Model of Motion Vectors" Symmetry 11, no. 1: 34. https://doi.org/10.3390/sym11010034
APA StyleYoo, J., & Lee, G.-c. (2019). Moving Object Detection Using an Object Motion Reflection Model of Motion Vectors. Symmetry, 11(1), 34. https://doi.org/10.3390/sym11010034