2.1. Model Setup
Consider two parties, , in a two-stage conflict. The ultimate winner of the final conflict in the second stage of the game is awarded a prize commonly valued at V by both parties. But winning the first stage of the game provides a cost advantage of to the first-stage winner in terms of competing in the second stage.
Solving backwards, in the second stage of the game, one party has already won the first stage, making their objective function for that stage
where
is the expenditure by the first-stage winner in the second stage,
is the expenditure by the first-stage loser in the second stage, and
is the expenditure of each party in the first stage. The expenditure by both parties is equal in the first stage since we assume symmetric valuations of
V.
The
parameter represents the sensitivity of the second-stage contest success function (CSF) to the relative expenditures chosen by the conflicting parties in that stage (see [
7,
9] for axiomitizations of CSFs). We initially impose the restriction
as is standard in the literature (e.g., [
10]), but will both verify this assumption and explore the more detailed joint restrictions on this parameter and
necessary for the participation of both parties in the next subsection.
The party that loses the first stage has a similar objective function in the second stage to that of the first-stage winner but without the cost advantage of
,
These objective functions lead to the first order conditions
and
which imply
, allowing the conditions to be solved to determine the equilibrium efforts of
and
These then lead to probabilities of victory (which are the same as they would be as in the case of the classic Tullock CSF)
and
and the corresponding expected payoffs
and
We then refer to the
value of the momentum as the difference between the winner’s and loser’s expected payoffs,
The first stage of the contest is then a battle for this value of momentum.
Assuming a different degree of elasticity for the contest success function in this initial stage, denoted
, the objective functions in this first-stage contest between players
I and
are
and
which lead to the standard equilibrium efforts of
The equilibrium (second-stage) expected payoffs are then
(because of the
-reduction in cost in the winner’s payoff), and
Before moving on to considerations of rent dissipation, we first must consider whether or not the parties will find it in their own best interests to participate in the conflict at each stage, which is the topic of the next subsection.
2.2. Participation, Parameter Restrictions, and Pyrrhic Victories
Though we have seemingly solved for the model’s equilibrium, we must still verify that the positive resource expenditure by each party is better than the option of sitting out the conflict and not spending at all. (We restrict our attention to pure-strategy Nash equilibria, since the mixed strategy equilibria that would result from one (or both) players not spending would simply involve parties mixing between the original game’s equilibrium spending levels and zero, as per [
11,
12]).
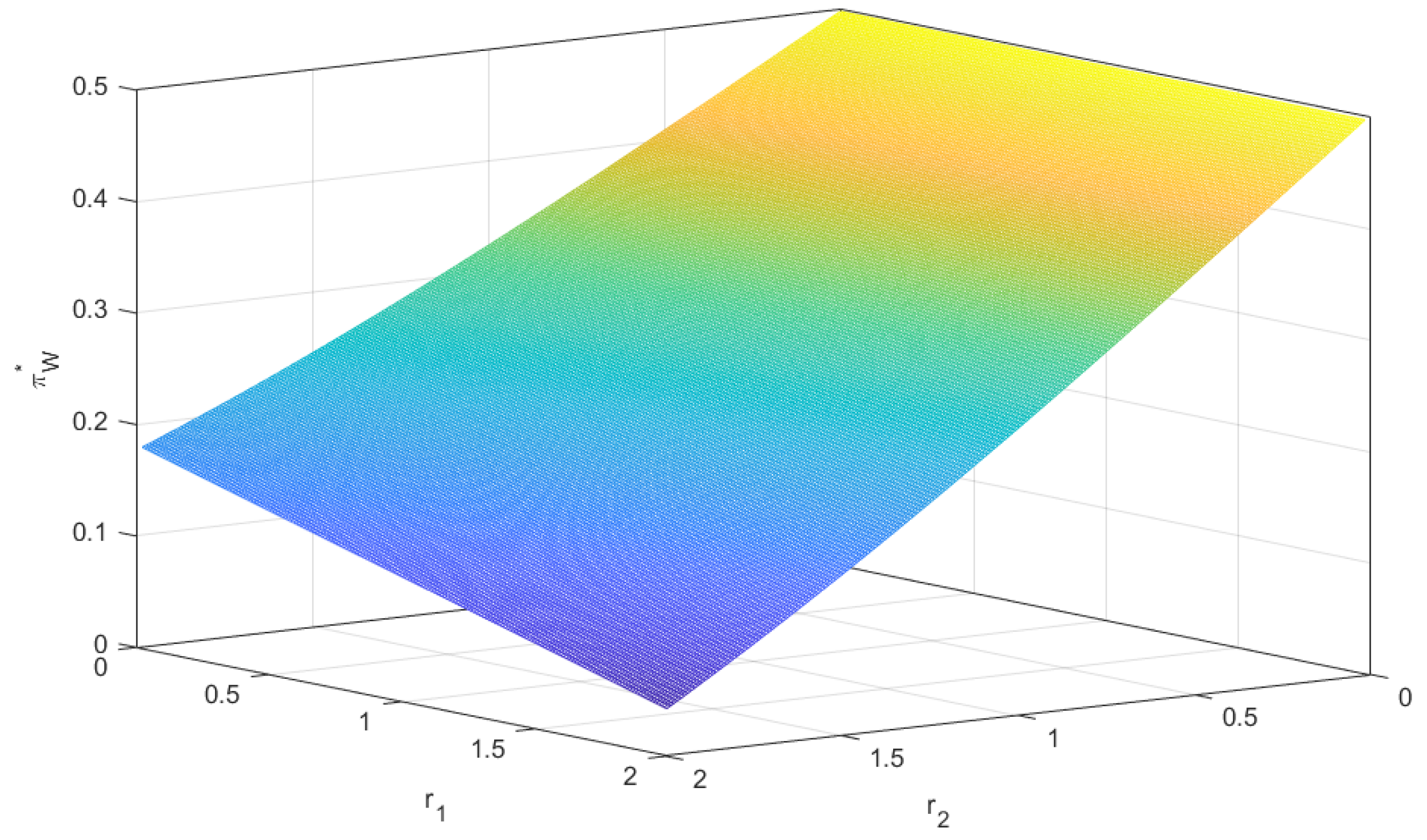
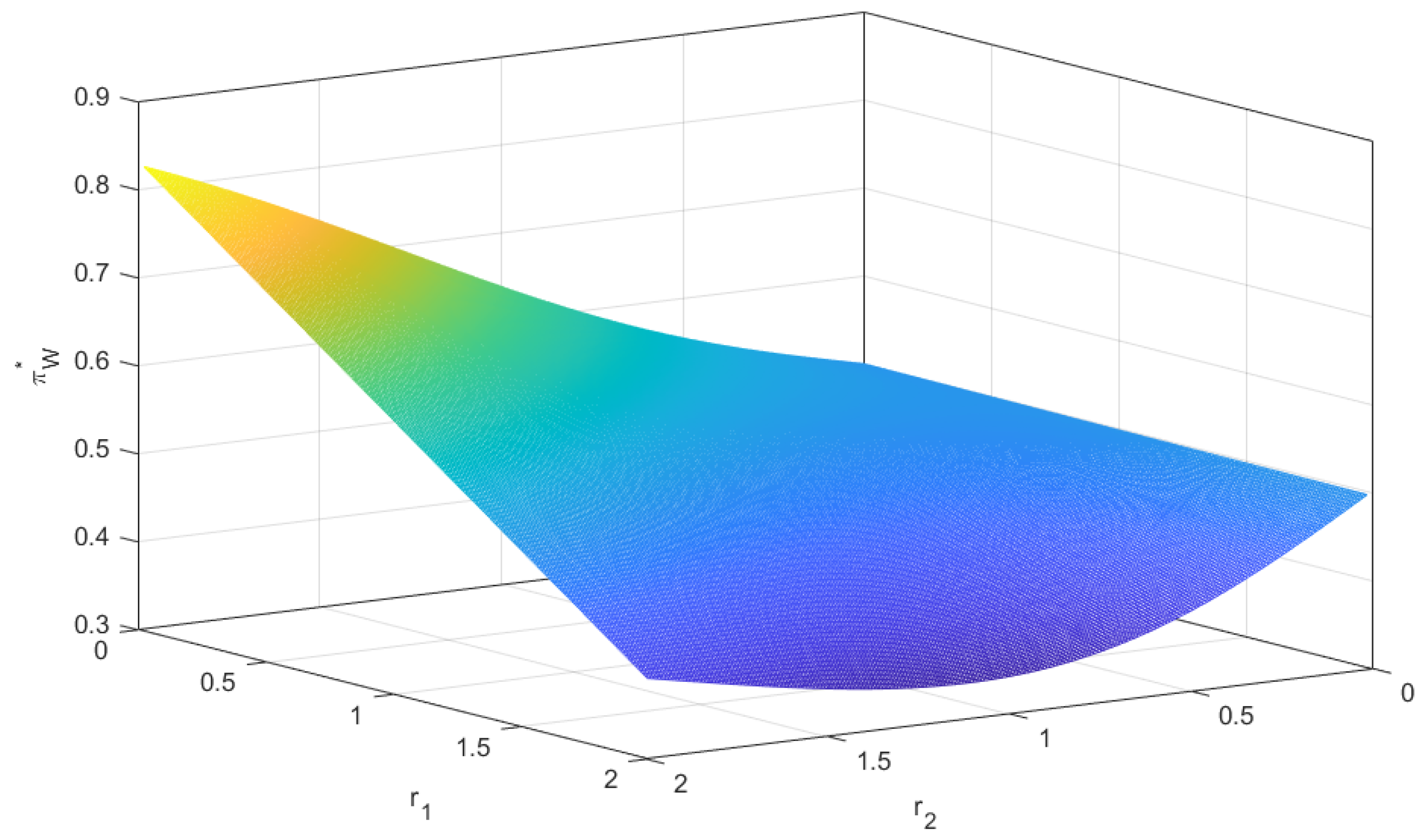
To show why participation may be an issue for some parameter configurations, we present three-dimensional graphs of and as and range from just over zero to two (our previously assumed ranges, and the ranges for unique interior solutions to exist in standard contest models). We provide three graphs for the equilibrium expected payoff of each party, one with , one with , and one with , to show how the relationship with the CSFs’ parameters changes with a lower reward to the first-stage winner (higher ) vs. a higher reward (lower ).
Figure 1,
Figure 2 and
Figure 3 illustrate the
relationship, and how the negative relationship gets stronger as
increases for given
. They also show that overall, for given
, a lower
(a bigger second-stage advantage to the first-stage winner) means a higher expected payoff:
.
The relationship is more nuanced. For larger (e.g., ), . For mid-range (e.g., ), for large enough , since the increased effort cost effect of dominates. But for small , begins negative but eventually becomes positive for larger as the improved probability of victory from increased dominates. This goes to the extreme for small (e.g., ), when the at low levels of and is still “U-shaped” (negative at low , then becoming positive as gets closer to 2) when is closer to 2.
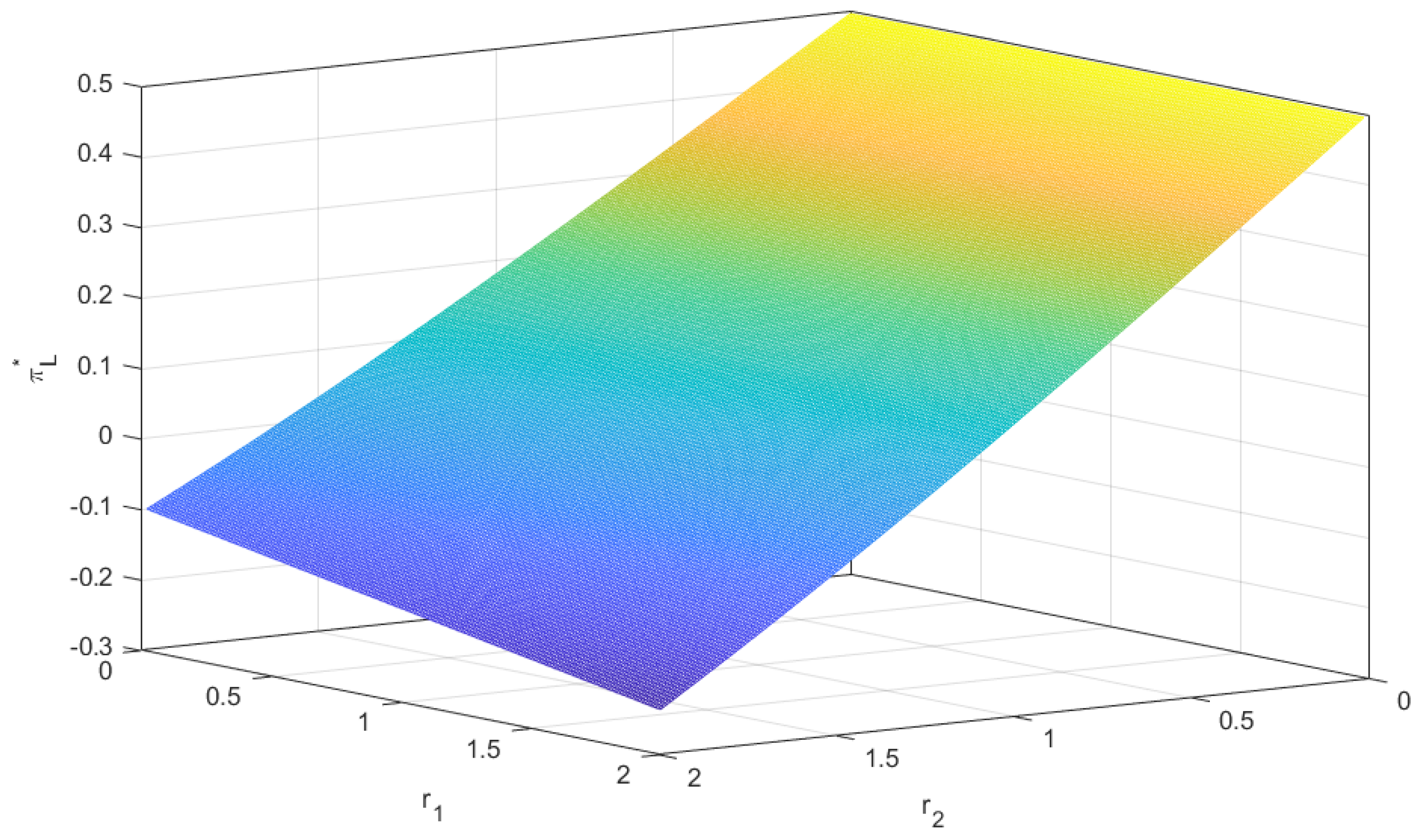
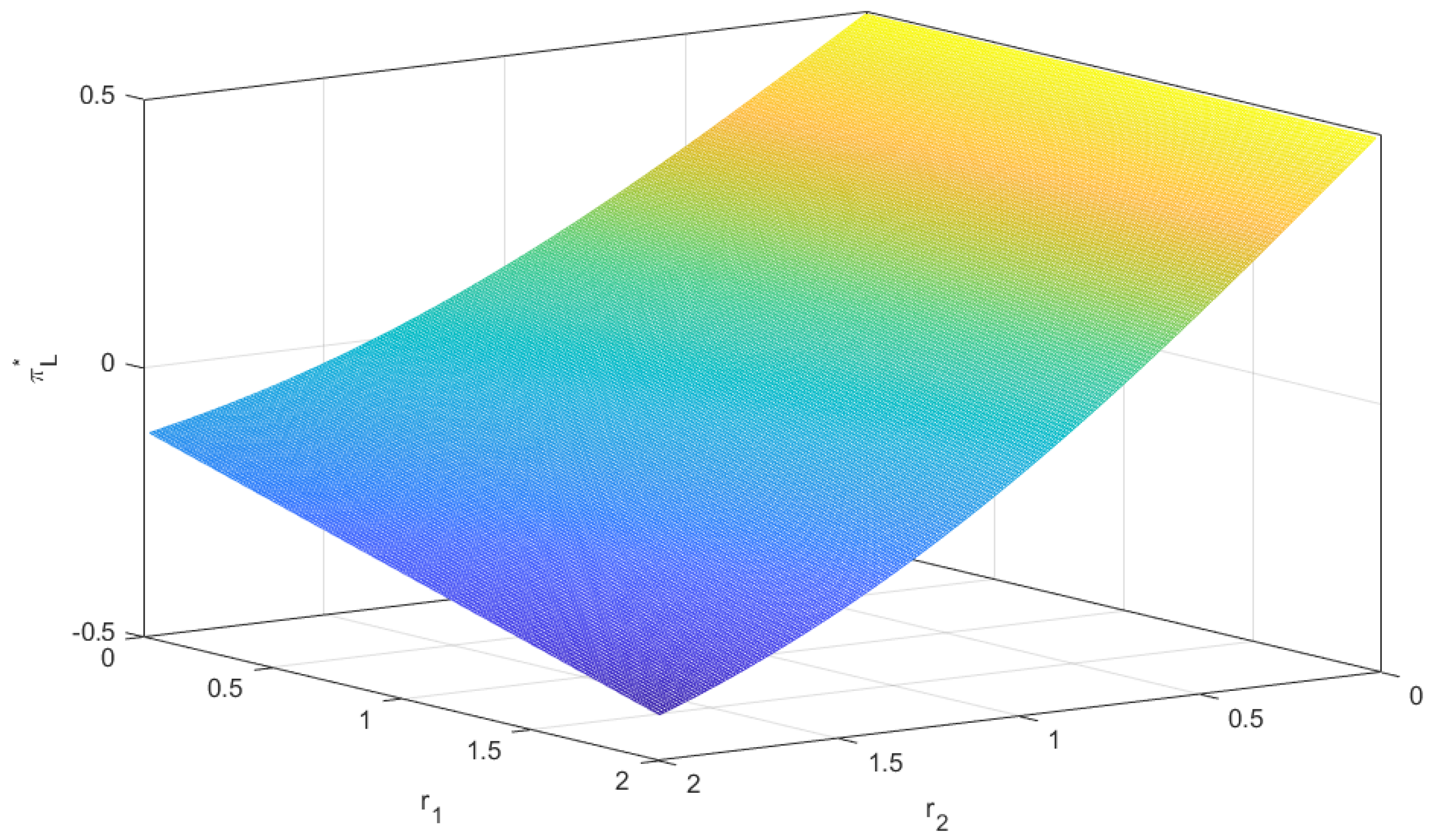
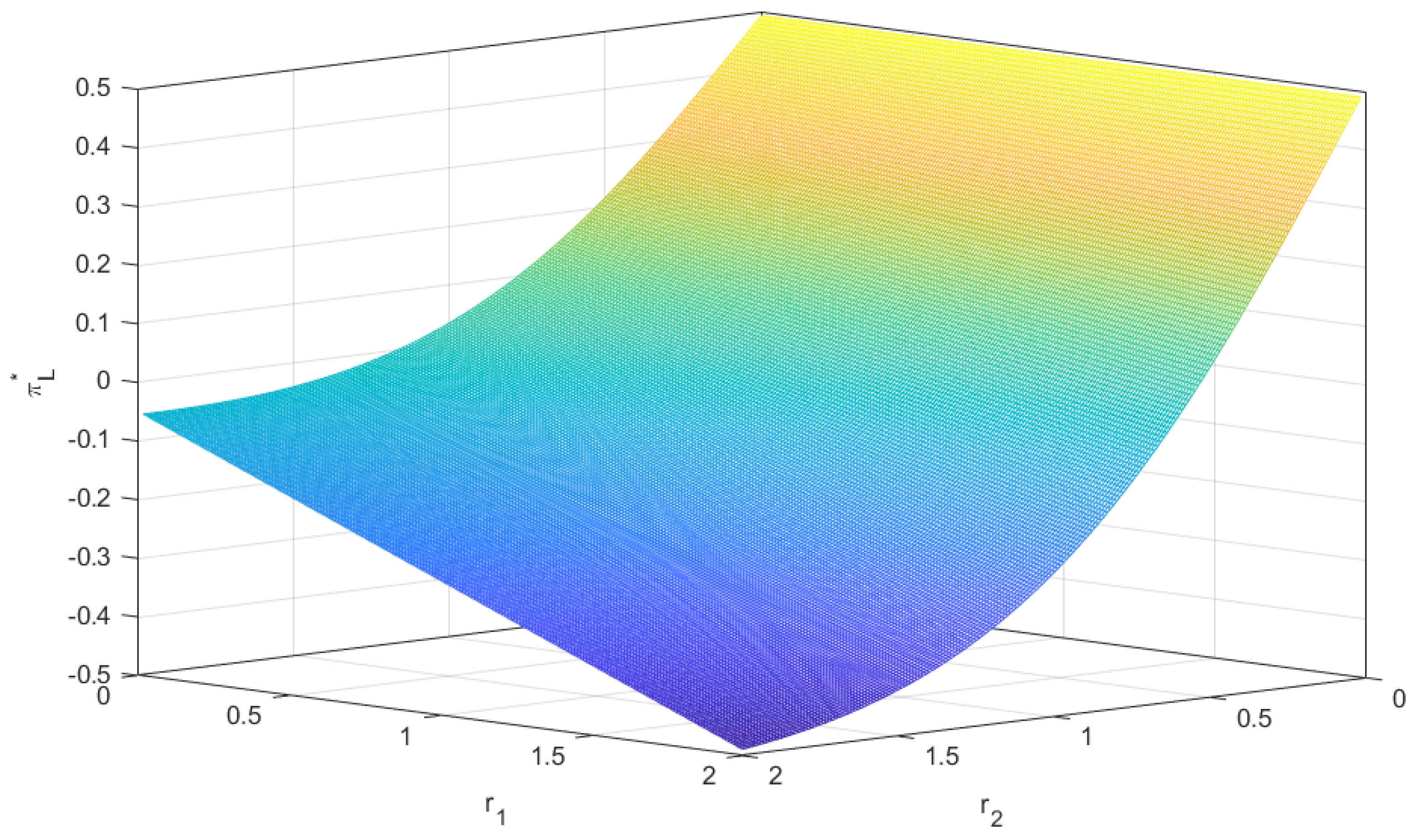
Figure 4,
Figure 5 and
Figure 6 illustrate the first-stage loser’s equilibrium expected payoffs for the three example values of
ranging over
and
. These relationships are similar to those for
but are easier to visualize, as
for all
and
, and
for all
and
. The bigger issue revealed by these graphs is that
can be negative for a variety of parameter combinations, which brings into question whether or not the parties will necessarily want to participate in the conflict.
We begin by considering second stage and assume that a party will not spend at all if their equilibrium expected payoff from that stage is lower than simply dropping out of the conflict and spending zero in the second stage. Since , we know that if the losing party from the first stage is willing to expend effort, the winning party will be willing to as well, so we only need to check the necessary condition for the first-stage losing party.
Since spending from the first stage is sunk, the necessary participation constraint for the second stage is
That is, if a party spends nothing in the second stage, they simply lose the battle with certainty and the sunk effort cost with it, so only the portion of the party’s expected payoff that is relevant to the second stage must be positive.
which simplifies to the following condition.
Participation Constraint (i) (PC (i)): .
This restriction could of course be simplified a step further to isolate in terms of , but we keep it as in for the purposes of illustration since the relationship is nonlinear.
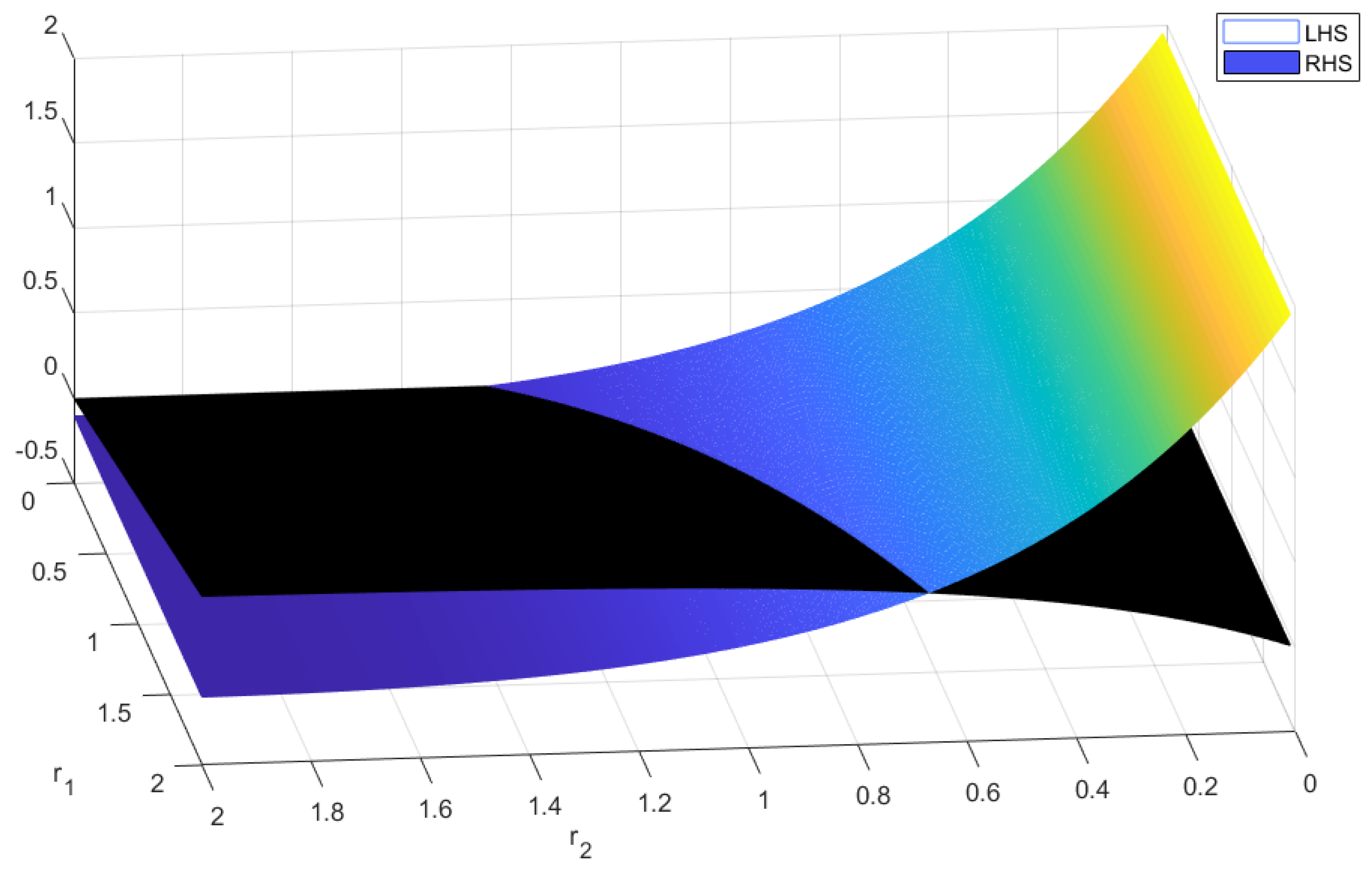
Figure 7 graphs the left- and right-hand sides of
in terms of
and
. All areas where
represent combinations of the two relevant parameters that result in second-stage conflict, with positive equilibrium expenditure by both parties as described in the previous section. All areas where
represent those combinations of
and
that lead the losing party of the first stage to choose zero expenditure and abstain from conflict in the second stage. Intuitively, the participation constraint becomes more constrictive in terms of the allowable range of
as the advantage to the first-stage winner increases (i.e., as
decreases) and vice versa. The larger the reward for winning the first stage, the less sensitive the second stage can be to effort without making it so much of an advantage that it completely deters the first-stage loser from continuing. The boundary of the maximum-allowable
for given
can be traced along the curve of the intersection in
Figure 7.
Our second participation constraint concerns the first stage of the conflict, when both parties have the option to either: expend effort seeking the advantage gained by the value of momentum or spend nothing and proceed to the second stage without that advantage with certainty (assuming the other party spends positively). In the latter case, of course, they also have zero sunk costs from the first stage. Thus, we compare the equilibrium expected payoff to a party—making positive equilibrium expenditures in each stage, since we assume is satisfied—to the expected payoff they would receive if they spend nothing in the first stage and competed only in the second stage at a disadvantage.
Since the parties are equal in the first stage, the positive-effort equilibrium is symmetric, and each has an equal probability of victory or loss. Their expected payoff if they participate in the first-stage (again, assuming participation in the second stage) is
. If they choose to opt out of the first stage with certainty and sacrifice their chance at momentum, their equilibrium expected payoff is
. The participation constraint is therefore
But since
we have
so (1) becomes
or
which simplifies to the following condition.
Participation Constraint (ii) (PC (ii)): .
This makes sense given that the first stage is essentially a standard contest with the value of momentum as its prize, leading to the usual restriction for as our participation constraint for the first stage (assuming is satisfied).
The sensitivity of the first stage (or the initial “battle for momentum”) to the expenditures of the conflicting parties is thus relatively unrestricted (so long as we are interested in pure-strategy equilibria), while the second stage must be permissible enough to vie for should a party lose the first stage. A second stage that is more sensitive to effort only enhances the advantage gained by momentum.
Even with these parameter constraints satisfied and both parties acting rationally according to backward induction, what is interesting is that Pyrrhic victories are still possible. In particular, note that in the game’s first stage each party has an equal chance of victory and, so long as is satisfied, the loser of that stage will still compete in the second stage. But although ensures that positive spending is better than none at that point, it does not guarantee a net-positive overall expected payoff.
Consider . As long as ℓ competes (i.e., spends a positive amount) in the second-stage conflict, , meaning they have a positive probability of victory. But their expected payoff (including their effort expenditure from the first stage, ) may be negative. The condition simplifies to or
Pyrrhic Victory (PV):
For example, consider , for which and are each satisfied for all (so that both parties compete in both stages of the conflict). Condition is satisfied, for all . So, for , the combatant who ends up losing the first-stage battle for momentum is set up to realize an expected Pyrrhic victory, in that his overall expected payoff is negative.
The condition under which such an expected Pyrrhic victory arises depends upon the values of all three parameters (i.e.,
,
, and
).
Figure 8 provides a plot of the left- and right-hand sides of condition
as functions of
and
for
. Condition
is satisfied—so that the first-stage loser realizes an expected Pyrrhic victory—when the black surface lies above the multi-colored surface.
2.3. Rent Dissipation
Total rent dissipated across the two stages is
such that total post-conflict rents are
Hence, the rent dissipation across the two players is equal, though the winner of the first stage does benefit from its win in terms of a higher likelihood of victory. What is perhaps interesting is that the elasticity of the contest success function does not determine that likelihood, but rather only the effort expenditure of the two contestants. Thus, momentum helps a player solely by enhancing the player’s ability for victory in the second-stage contest. It does not, however, change the player’s calculus of second-stage contest nor create any welfare changes therefrom.
From the second-stage objective functions, it is straightforward to see that the present contest is more rent-dissipative than a one-stage contest that features the same level of cost asymmetry,
, and noise parameter,
, as observed in the second round of this two-stage contest. Specifically, such an alternative contest would be less rent-dissipative by
units of input expenditure. We know this because objective functions for each party in this alternative one-shot contest would be the same as the second-stage objective functions observed herein, but would exclude the
term from each function, where this term is not marginal to the decision calculus of that stage. Therefore, this term exactly measures additional rent-dissipation for each party in the two-stage game with contestable momentum. To check this reasoning, we can reconsider total rent-dissipation in the present contest:
The second term in the sum above is simply . Then, we expect the first term in the sum above to represent total rent dissipation for the alternative one-shot contest discussed previously. It is straightforward to verify that this is the case. That is, we find that . From this result, we conclude that, ceteris paribus, contestable advantage in conflict is more rent-dissipative than innate or otherwise incontestable advantage. Therefore, we expect Pyrrhic victories to be more common for contests that feature an intermediate stage or stages in which subsequent advantages can be earned, ceteris paribus. This additional rent-dissipative toll exists even given a backward-inductive (equilibrium) behavior in a setting of complete information rather than one characterized by “fog of war” effects. The quagmire theory suggests that countries can become involved in problematic (i.e., rent-dissipative) conflicts due to incomplete information. The present paper finds that the setting of conflict—namely, the contestibility of intermediate, momentous advantage in a conflict—can effectively substitute for incomplete information in generating rent-dissipative tolls.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







