
Numerical Simulation and Experimental Verification of Electric–Acoustic Conversion Property of Tangentially Polarized Thin Cylindrical Transducer

 ,
, 
Abstract
:1. Introduction
2. Theoretical Model
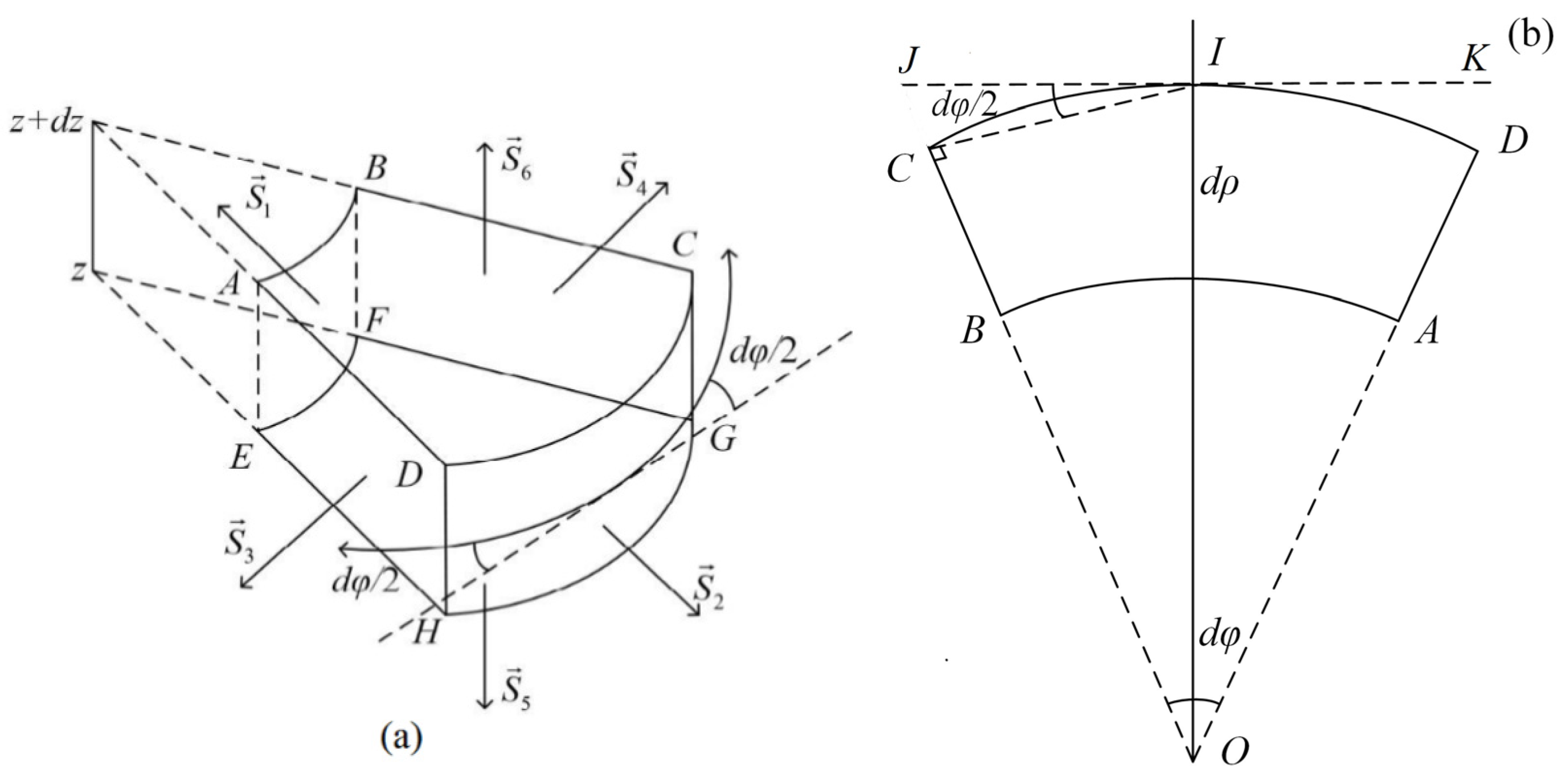
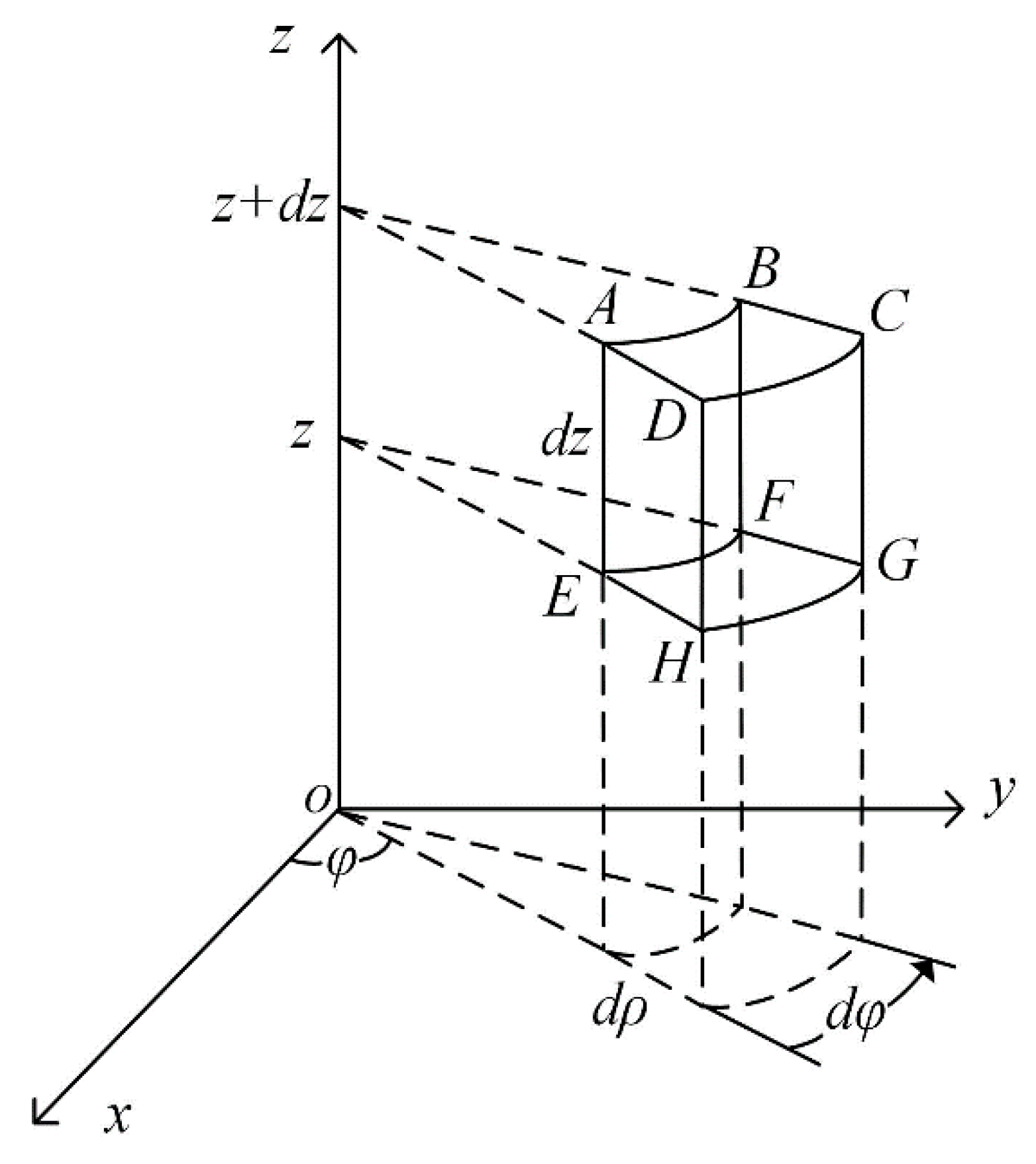
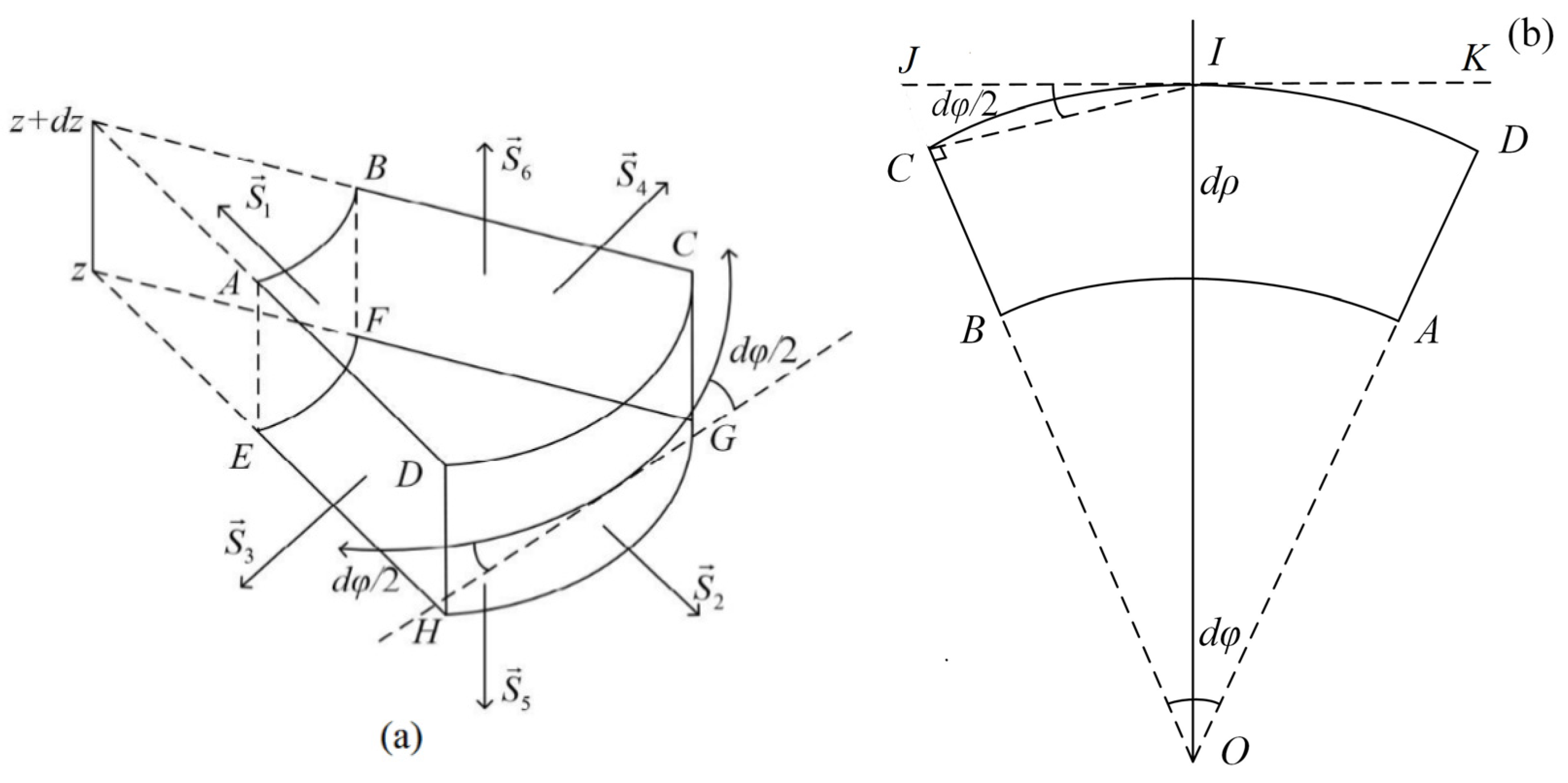
2.1. Equation of Motion for Excitation Response of the Transducer
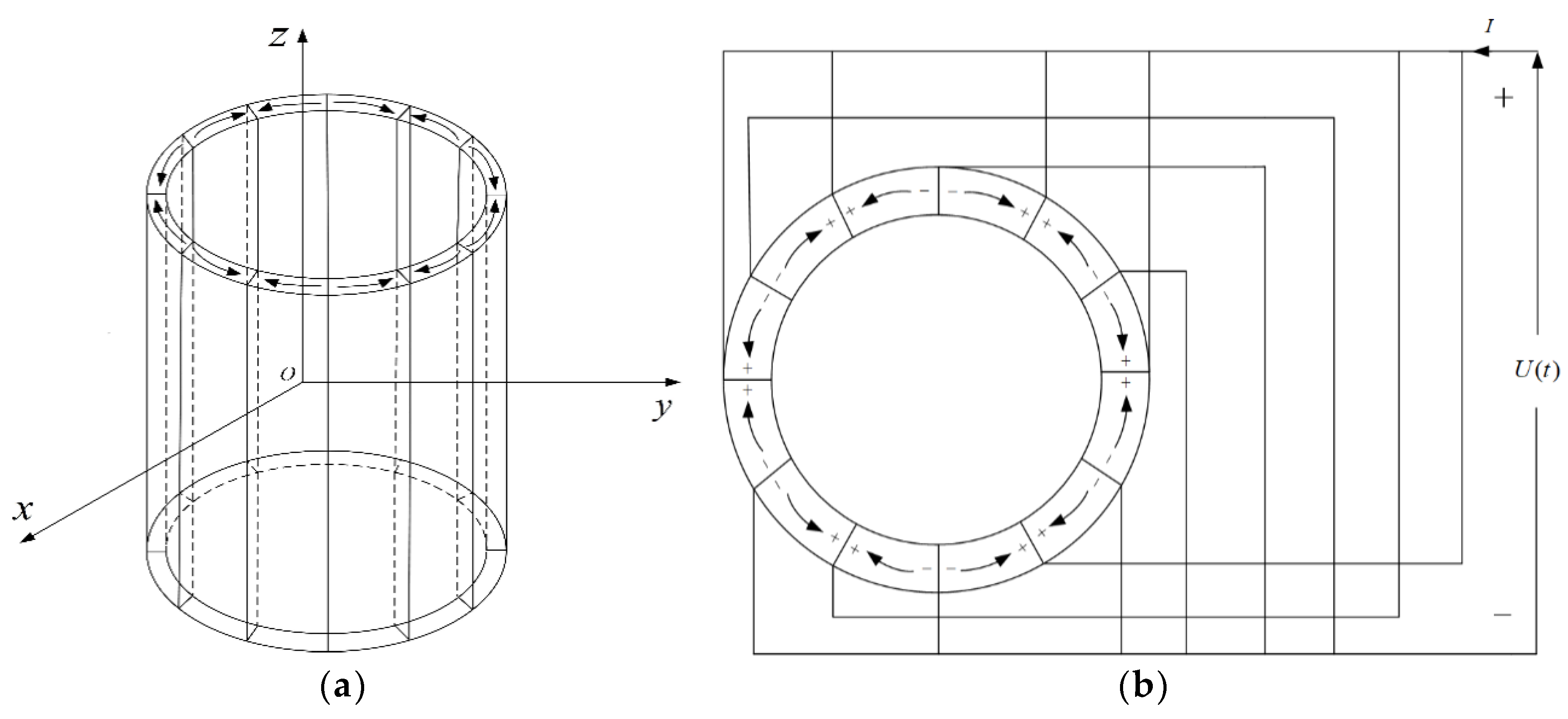
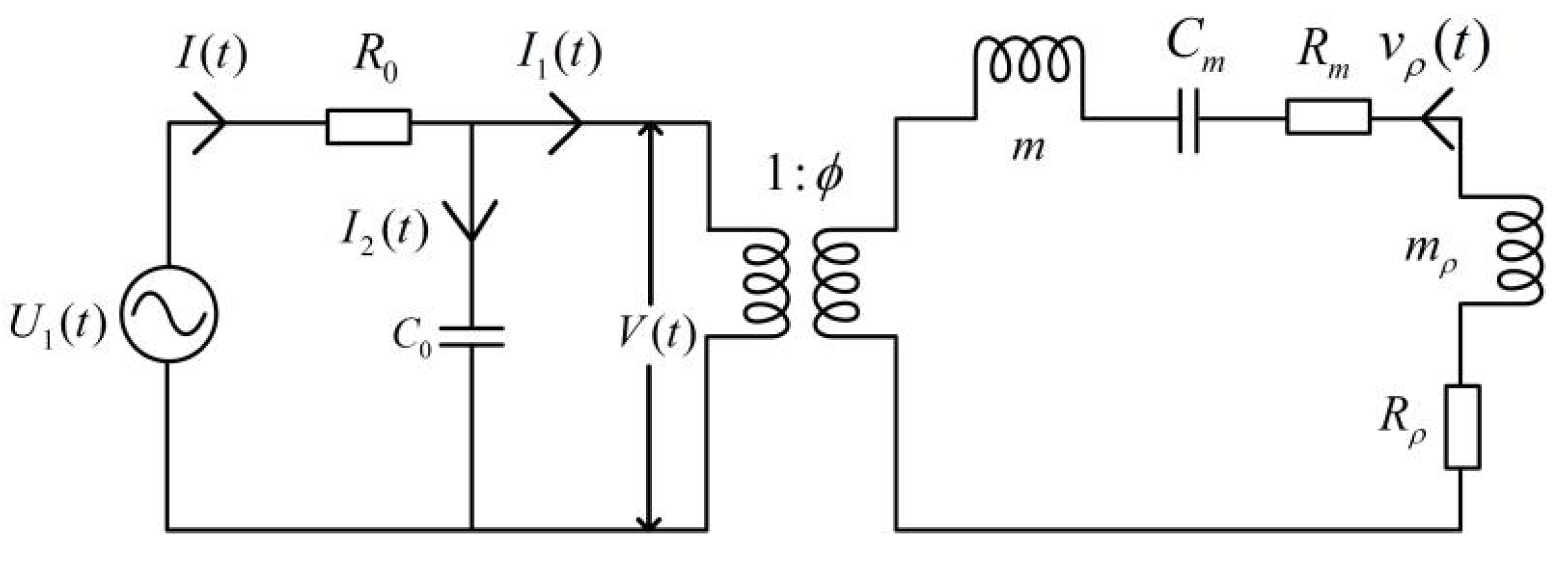
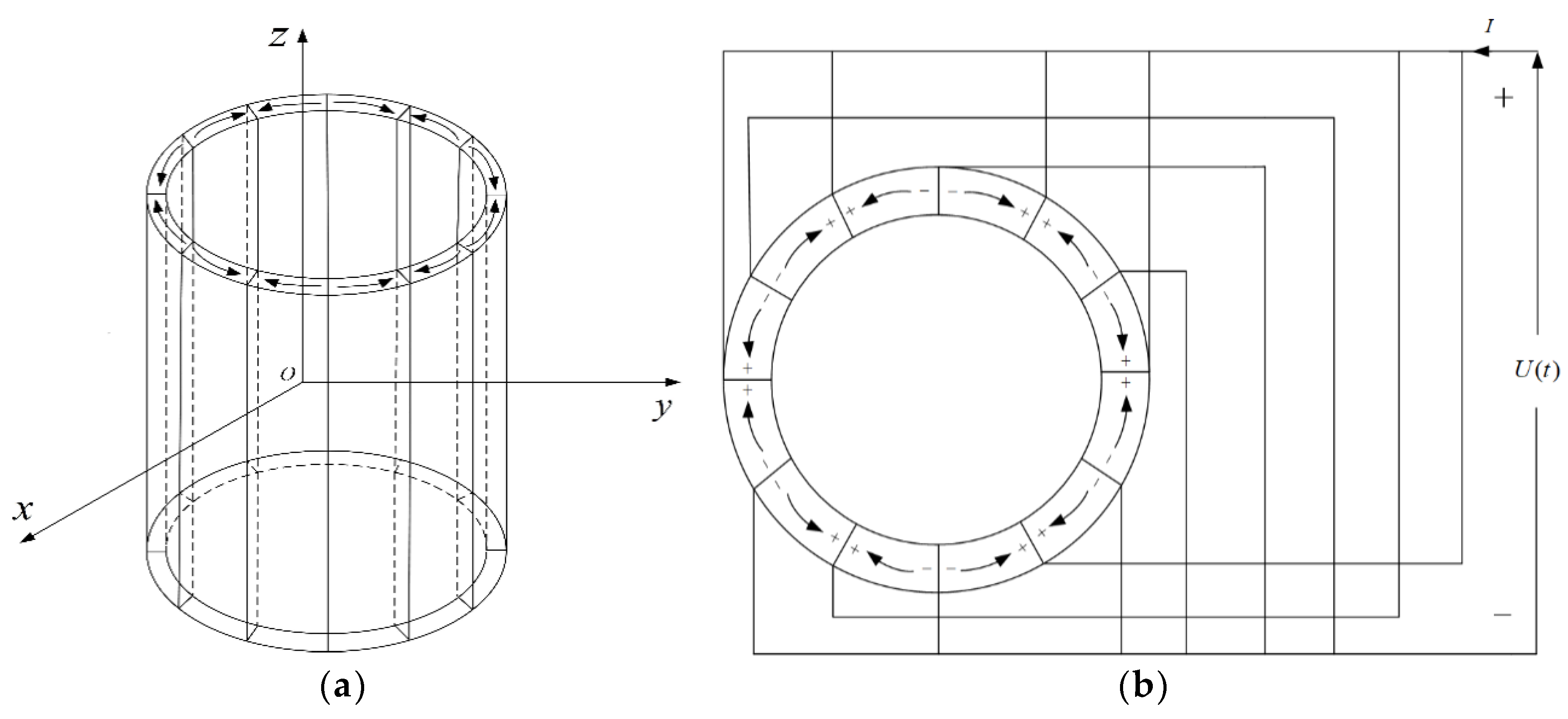
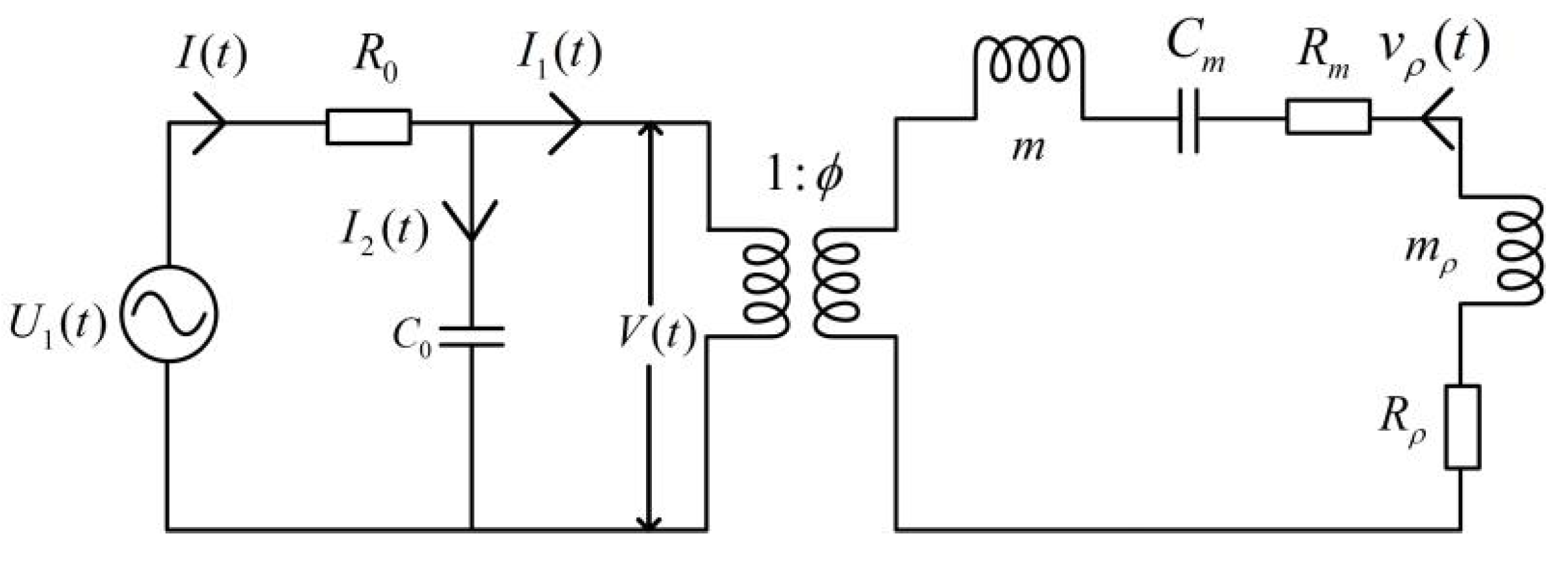
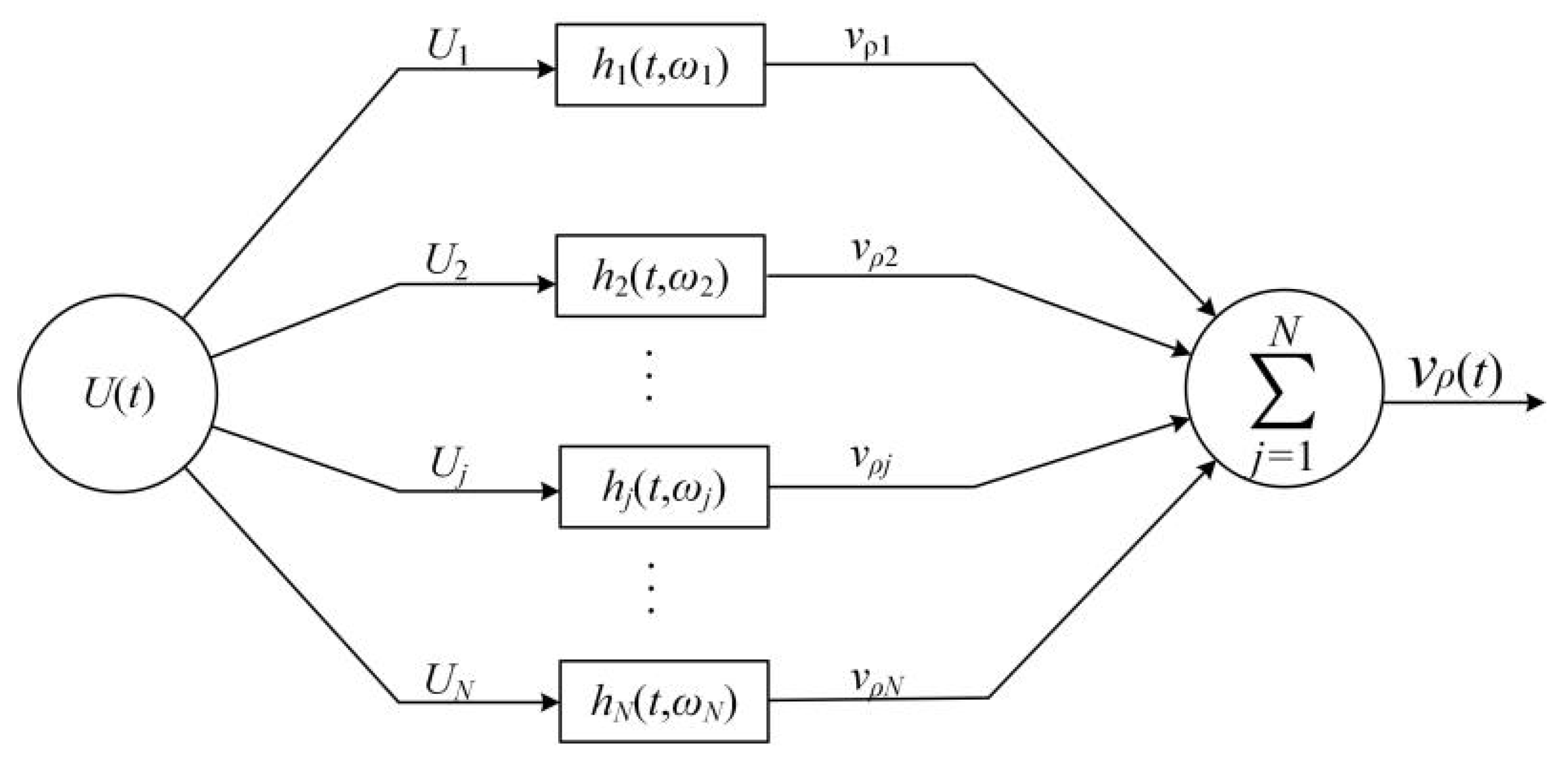
2.2. Electric-Mechanical Equivalent Network for Tangentially Polarized Thin Cylindrical Piezoelectric Transducers
3. Numerical Calculation and Analysis
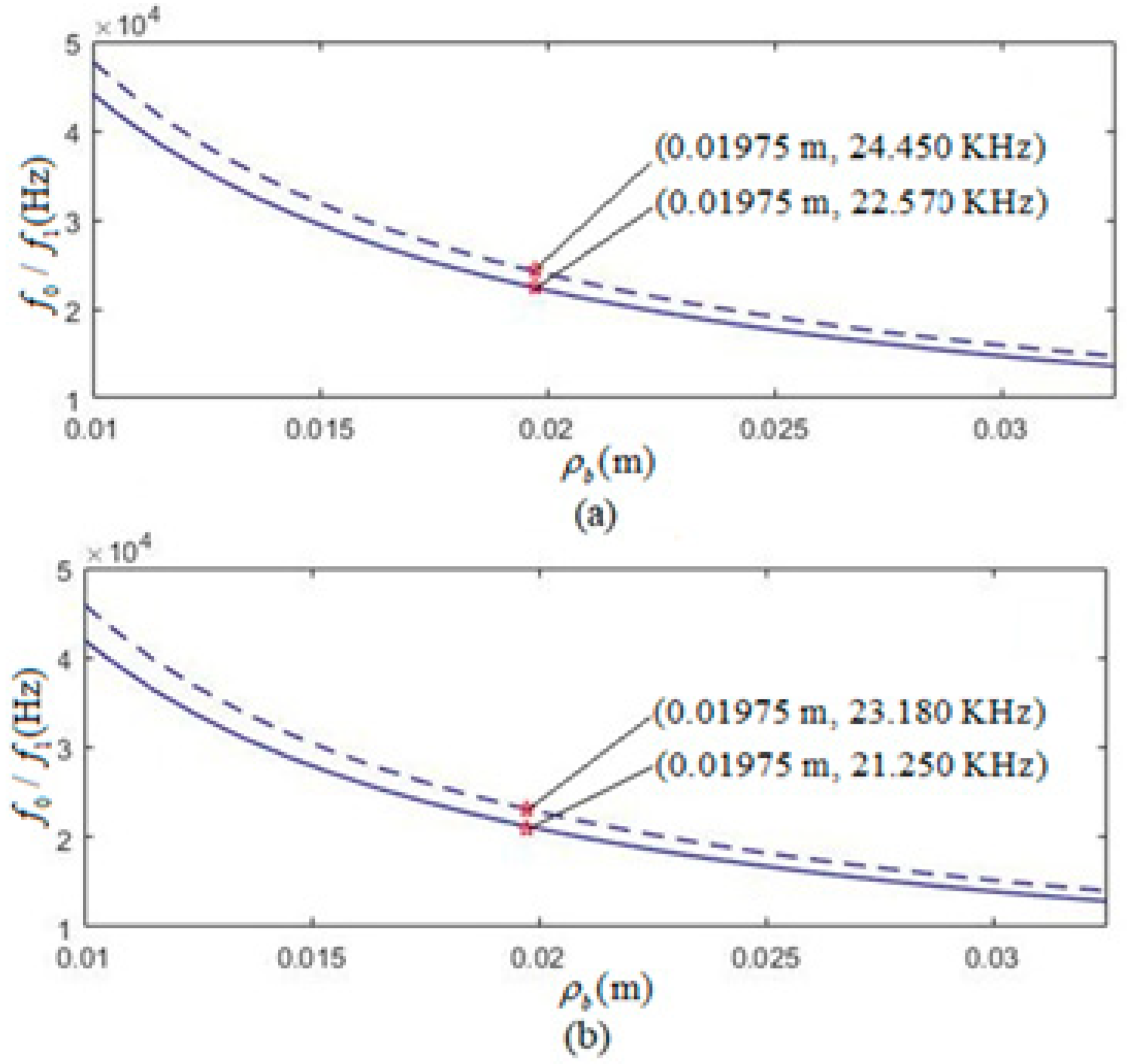
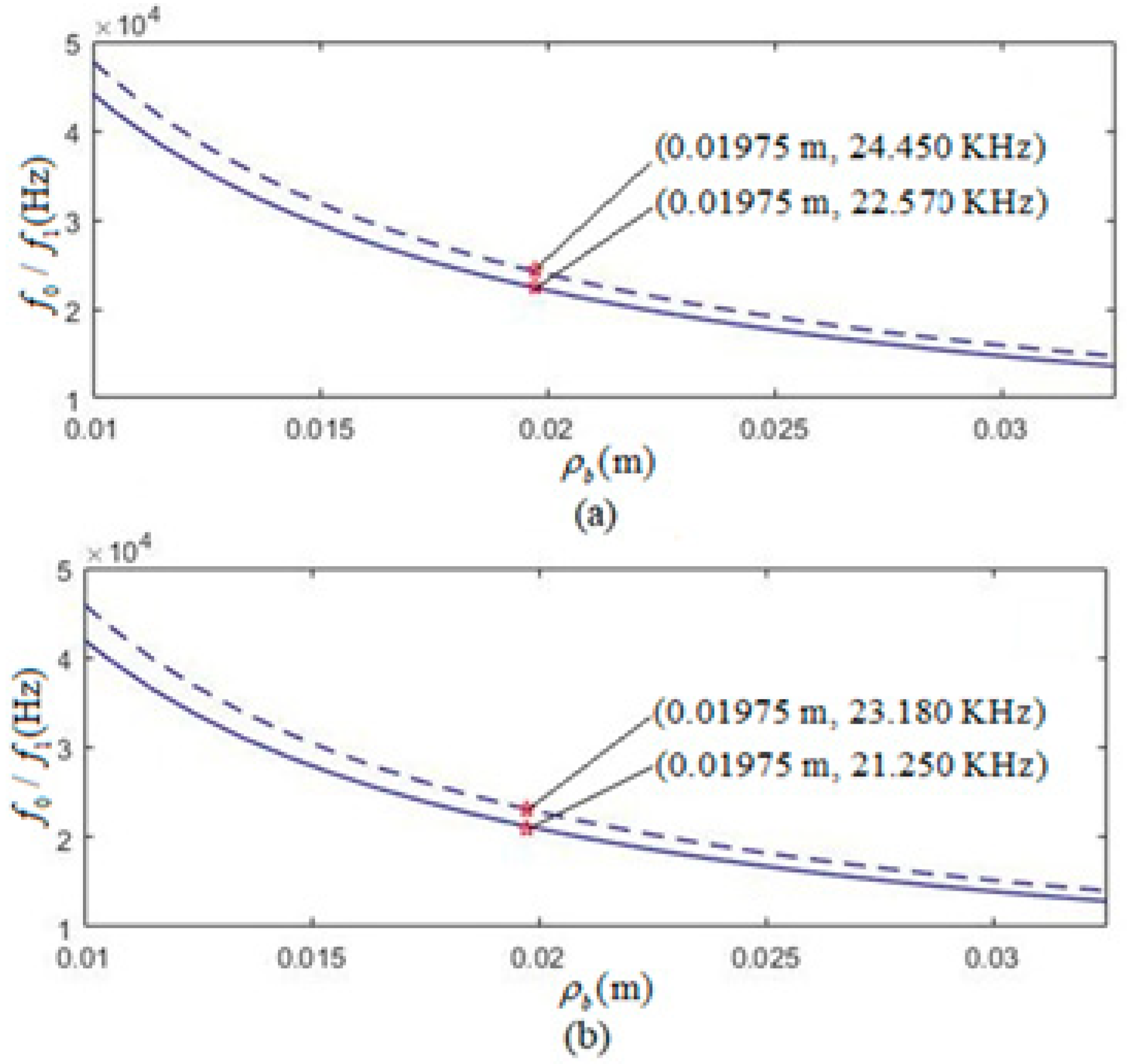
3.1. Resonant Frequency of Thin Cylindrical Piezoelectric Transducer
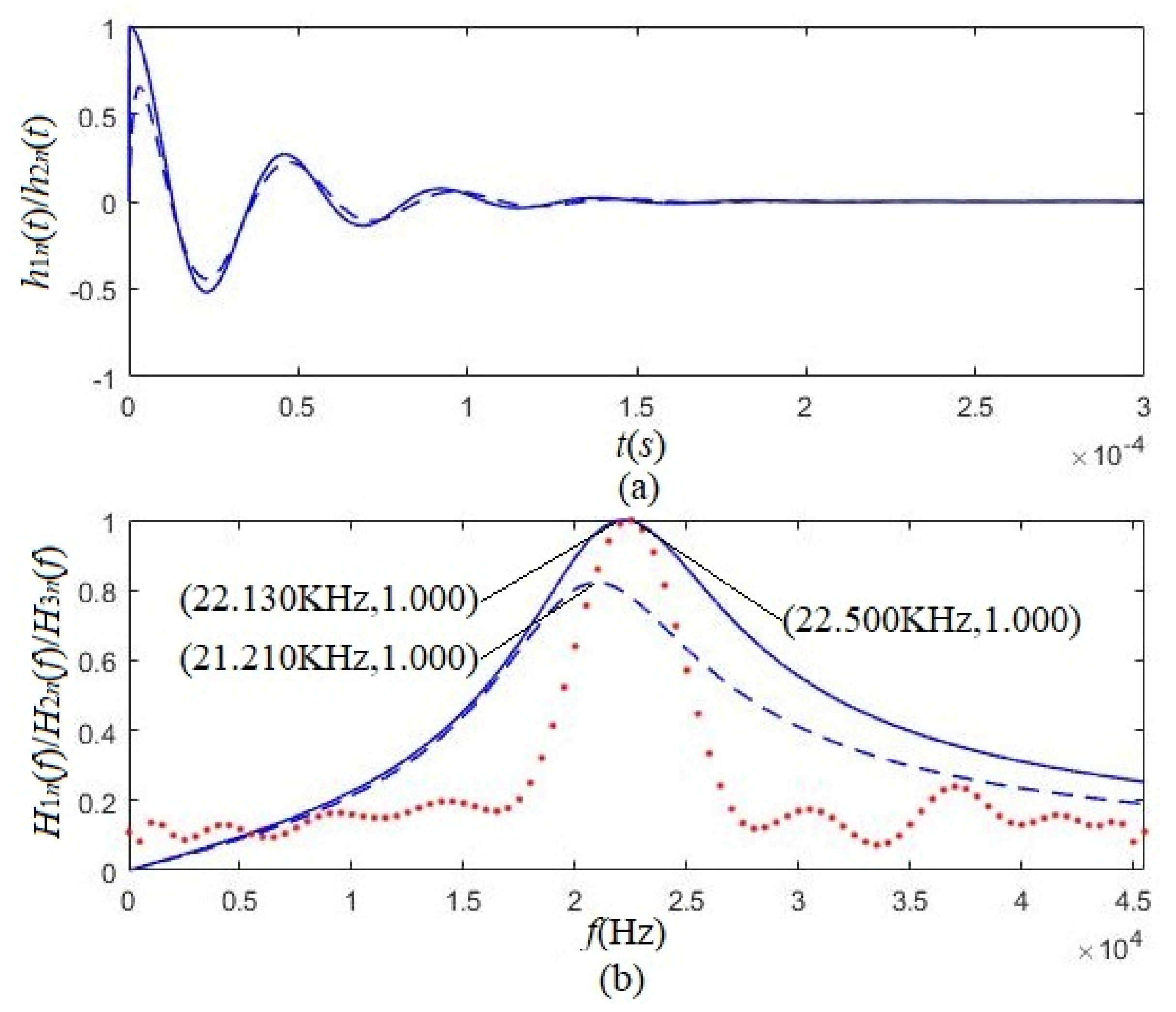
3.2. Impulse Response of Electric–Acoustic Conversion
- (i)
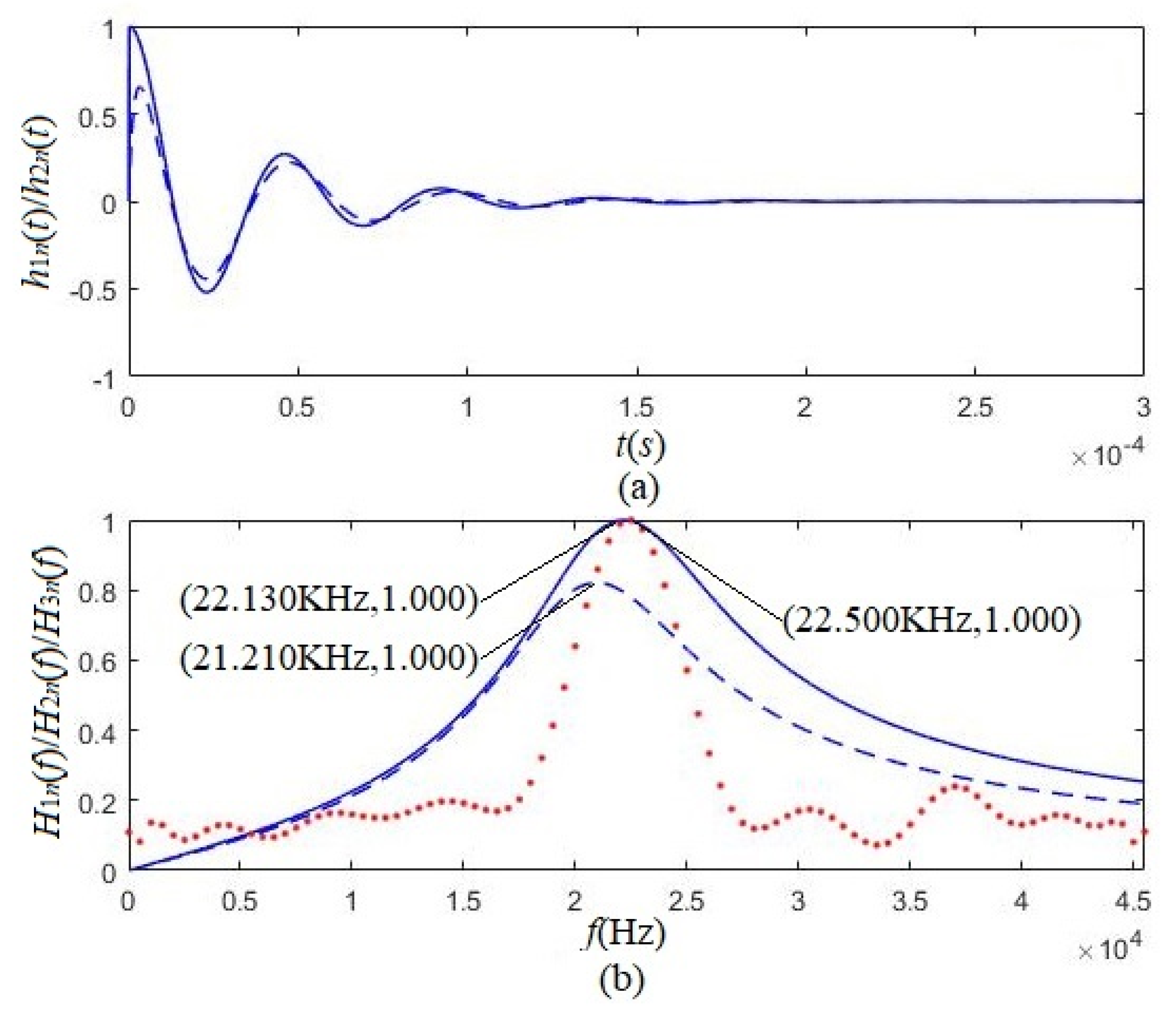
- On the peaks of the absolute values of electric–acoustic impulse response and system function, the tangentially polarized thin cylindrical transducers were more pronounced than that of the radially polarized thin cylindrical transducers. The electric–acoustic conversion characteristics of the former were better than that of the latter.
- (ii)
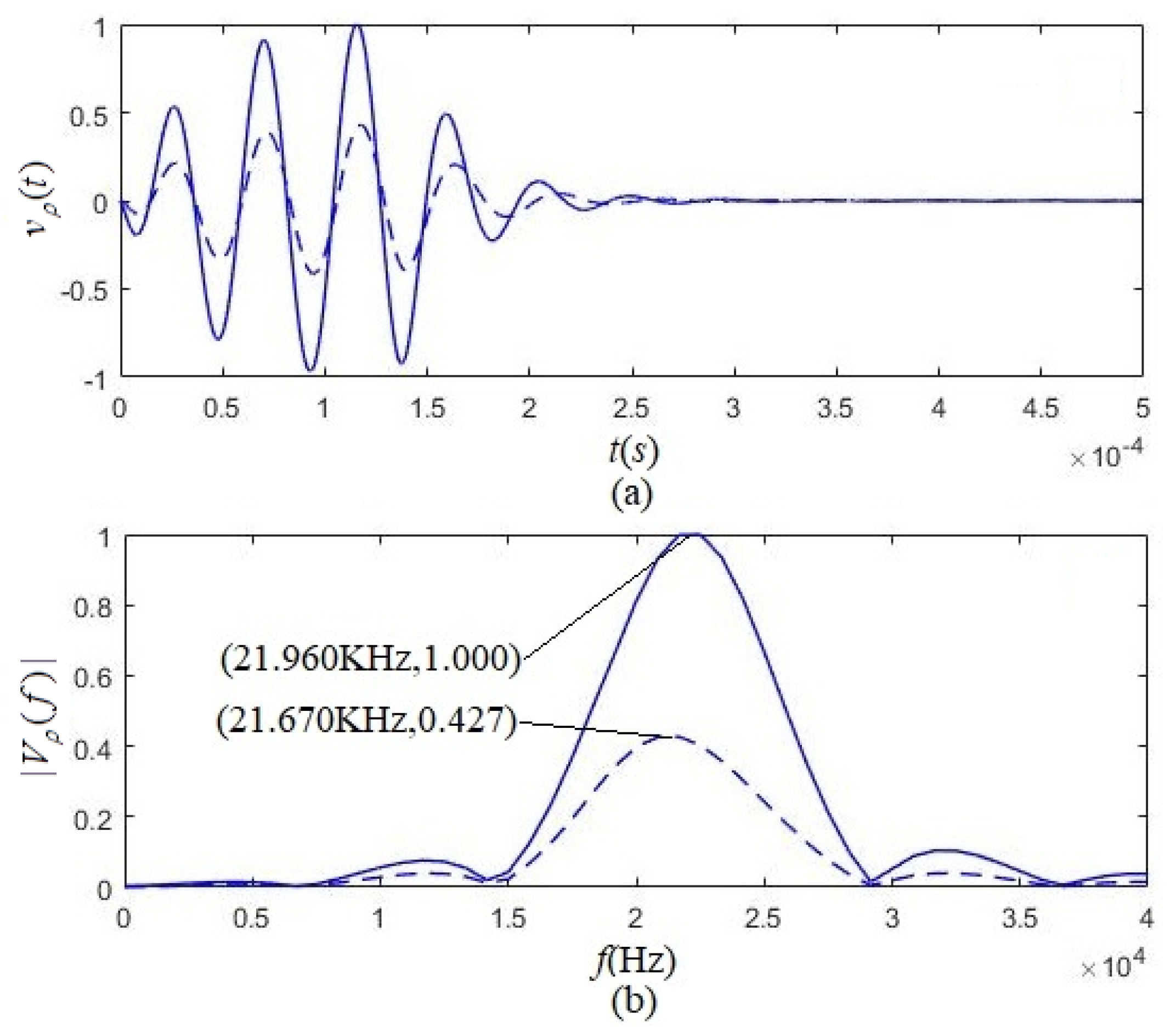
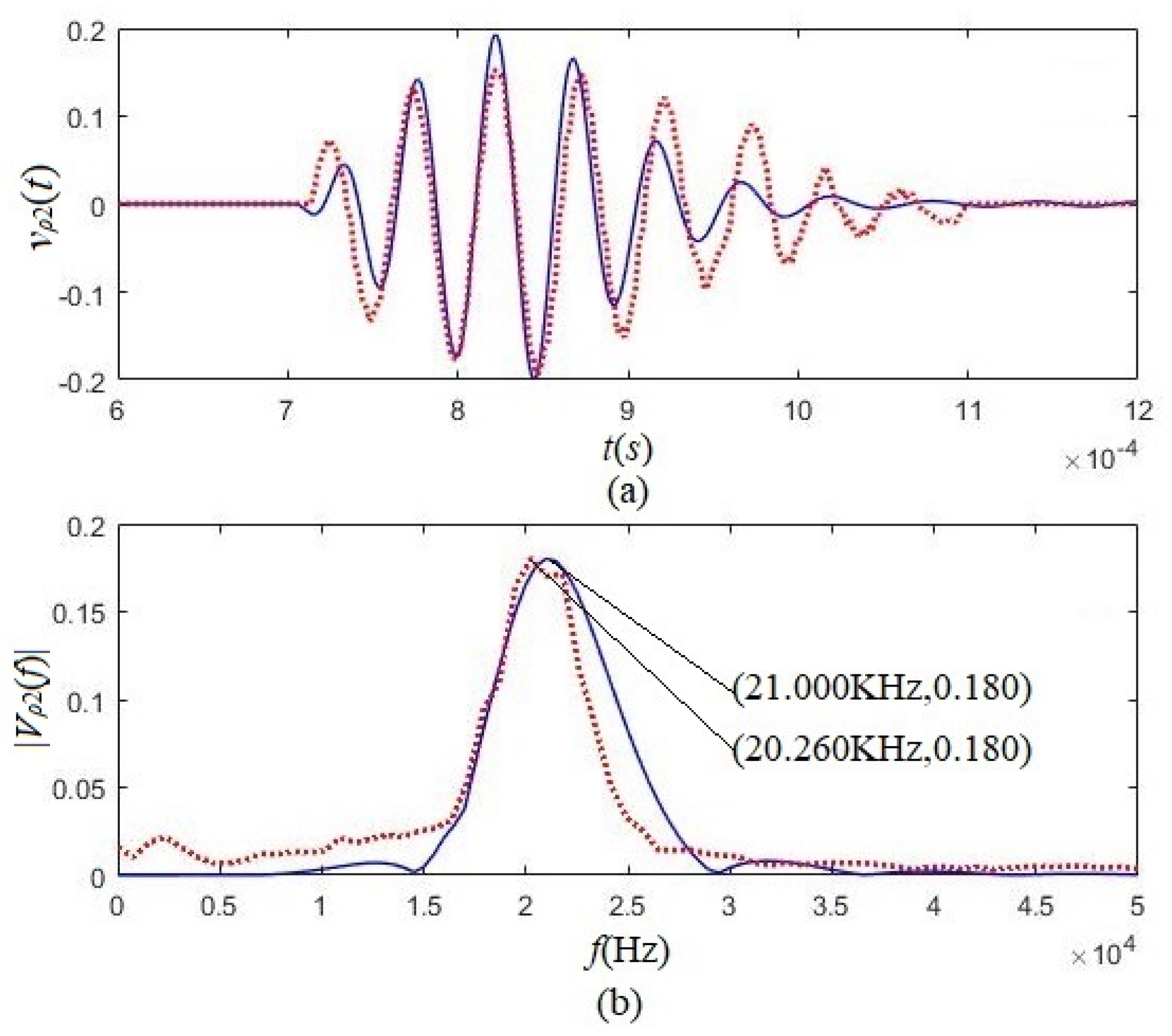
- The tangentially polarized transducer’s loading center frequency () is 22.130 kHz, lower than the corresponding loading resonant frequency ( = 22.570 kHz). The radially polarized transducer’s loading center frequency () is 21.210 kHz, also lower than its corresponding resonant frequency ( = 21.250 kHz).
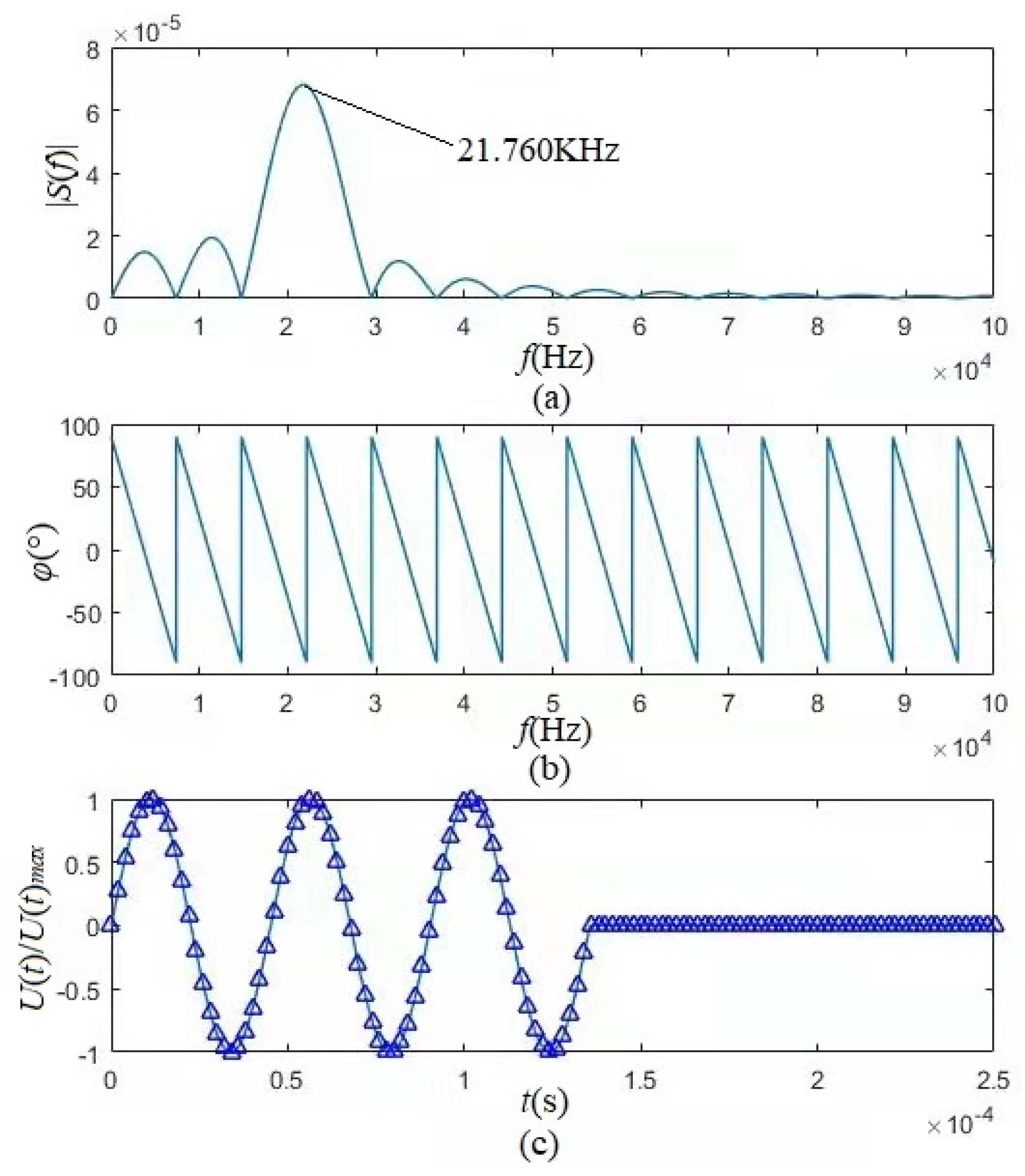
3.3. Driving-Voltage Signal and Radiated Acoustic-Signal
4. Experiment Verification
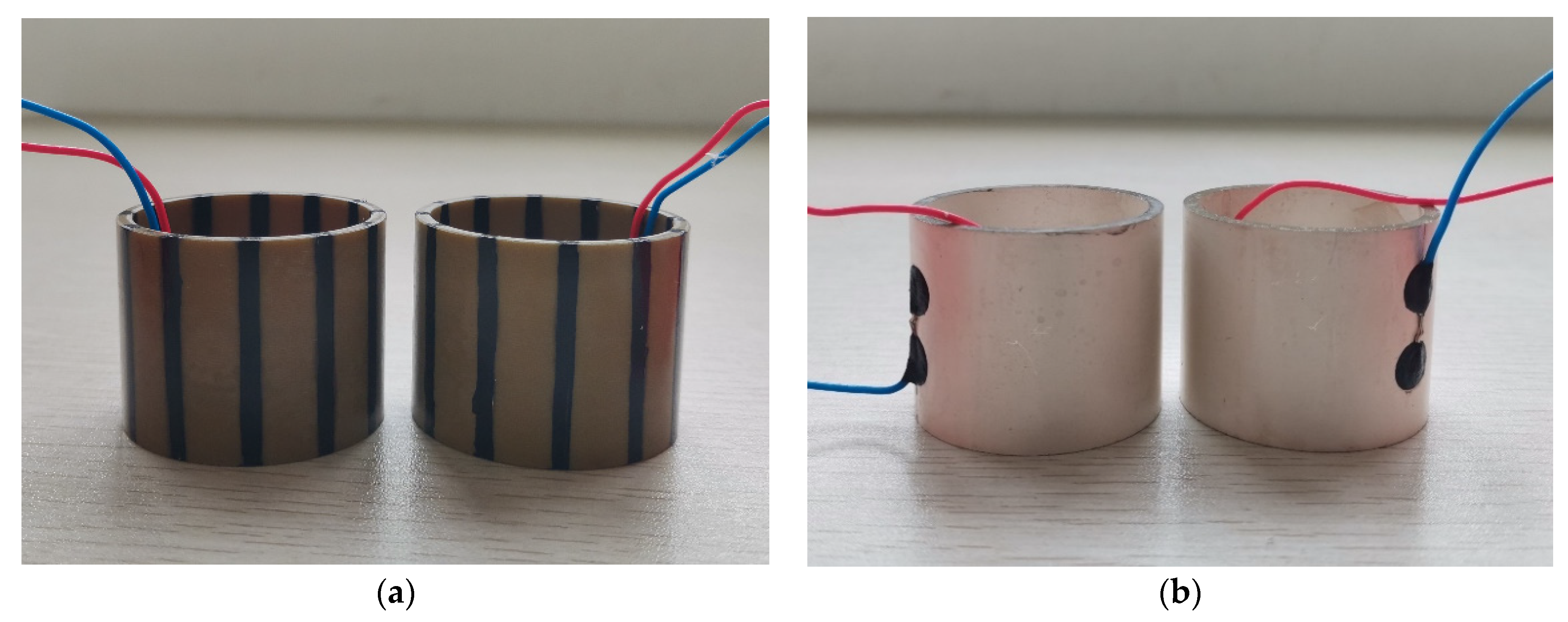
4.1. Experimental Measurement of Loading Resonant Frequency of the Tangentially Polarized Thin Cylindrical Transducer
4.2. Comparision of the Electric–Acoustic Property of the Tangentially Polarized Transducer with That of the Radially Polarized Transducer
5. Conclusions
- (i)
- We established an electric–acoustic equivalent circuit for the tangentially polarized thin cylindrical transducer with a single-frequency harmonic vibration by solving the piezoelectric and motion equations, which serve as the base for the multifrequency transmission network.
- (ii)
- By invoking the residue principle, we derived the analytical expressions of the electric–acoustic impulse response and the system function of the tangentially polarized thin cylindrical transducer with a given single-frequency harmonic vibration. The electric-acoustic impulse response varies with the transducer’s harmonic vibration frequency.
- (iii)
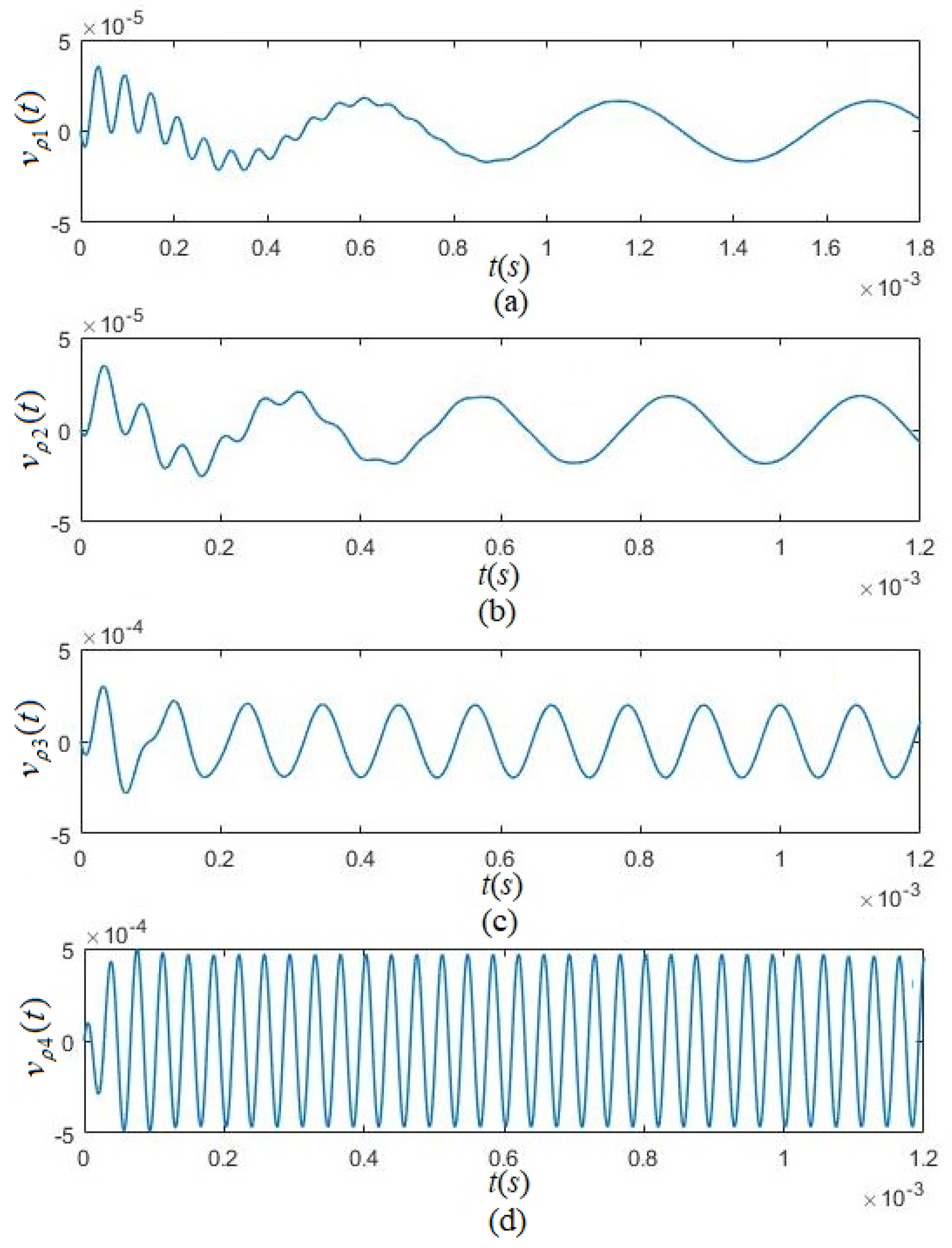
- The impulse response of the tangentially polarized thin cylindrical transducer consists of one direct-current damping and one damping oscillation (see Equation (54)). The first term of the frequency components acts in a low-frequency range, and the second term distributes in a higher-frequency range. The frequency corresponding to the maximum value of the damping-oscillation term’s amplitude spectrum is the transducer’s resonant frequency. The loading center frequency corresponds to the amplitude spectrum’s maximum of the transducer’s impulse response (the direct-current damping and the damping-oscillation terms). Therefore, the loading center frequency of the transducer is lower than its loading resonant frequency.
- (iv)
- The resonant frequency of the transducer decreases with its average radius. So does its center frequency. The free-loading resonant frequency of the transducer is slightly greater than its loading resonant frequency.
- (v)
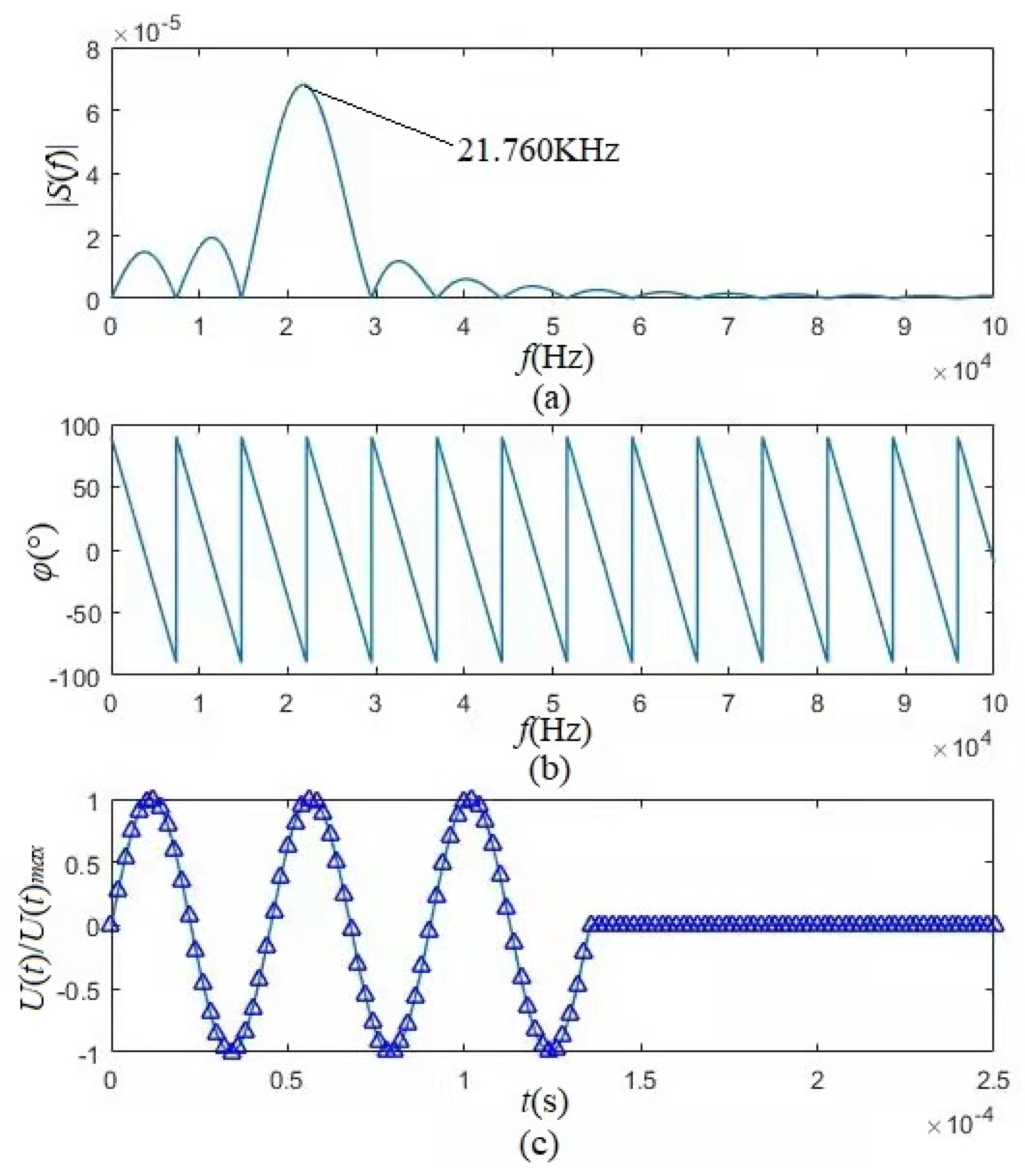
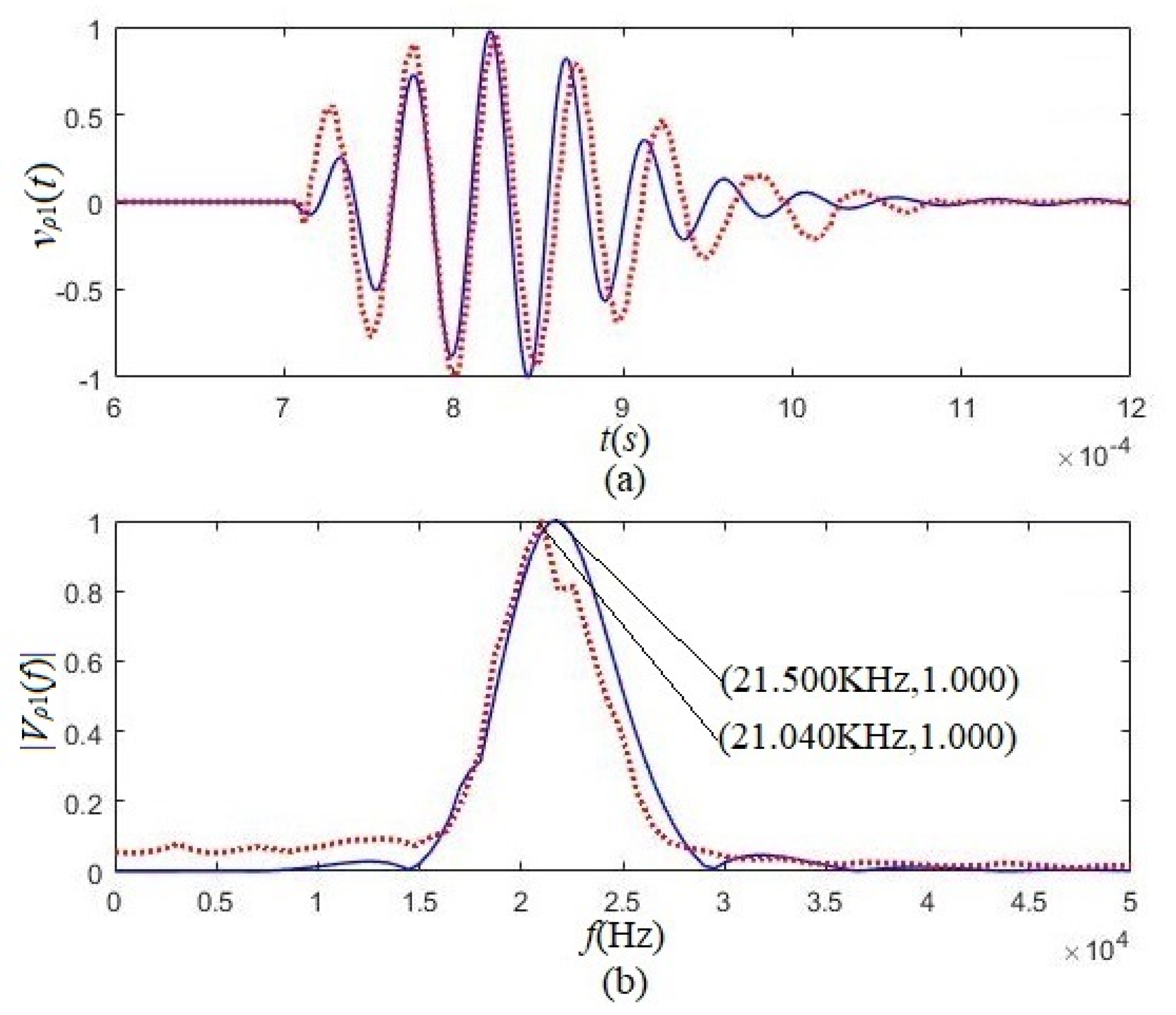
- The measured frequency response curve for the transducer is much narrower than the calculated amplitude spectrum curve that corresponds to the impulse response of the transducer. This phenomenon results from the combined action of the electric-acoustic filtering of the acoustic source transducer on the driving-voltage signal and the acoustic-electrical filtering of the receiving transducer on the measured acoustic signal.
- (vi)
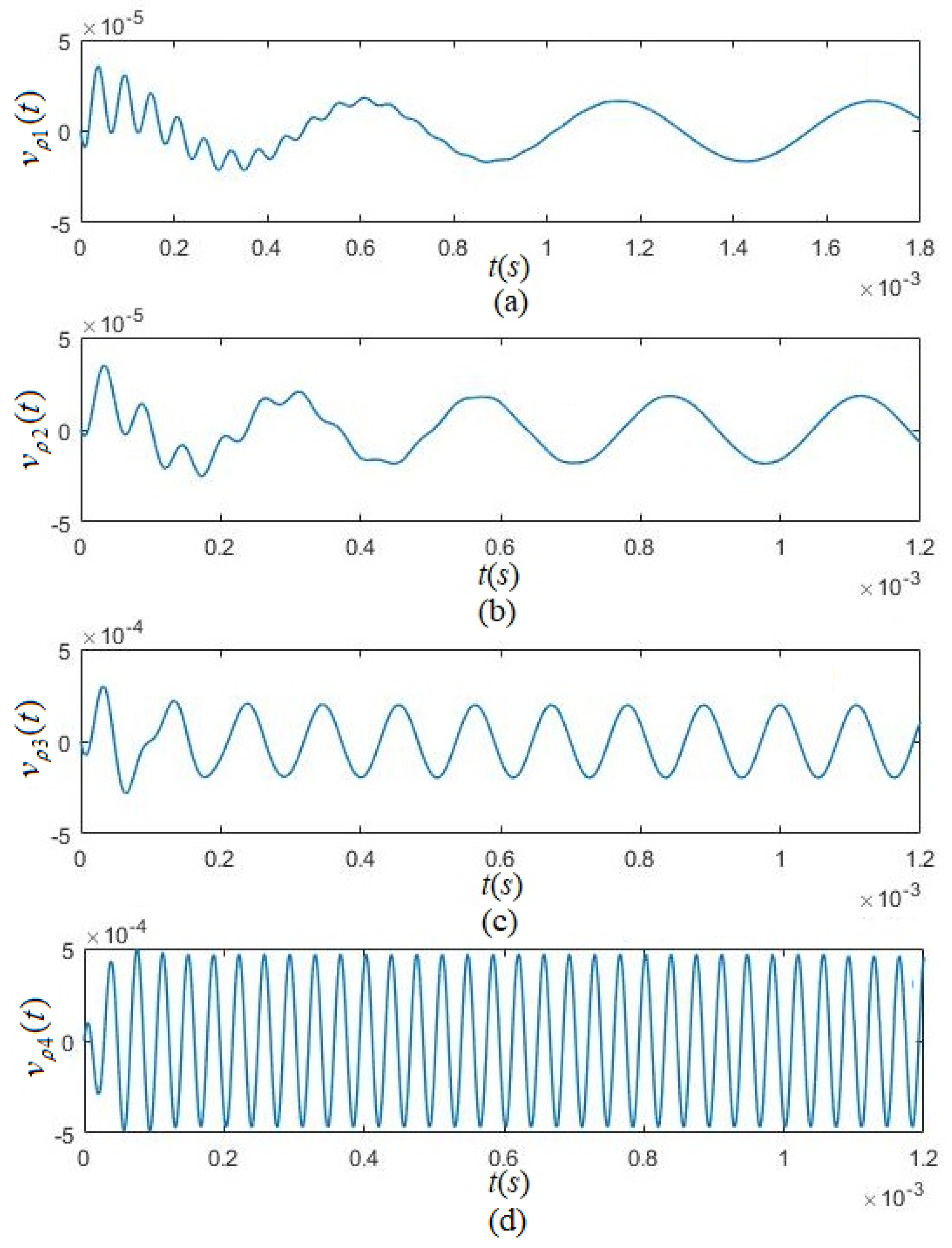
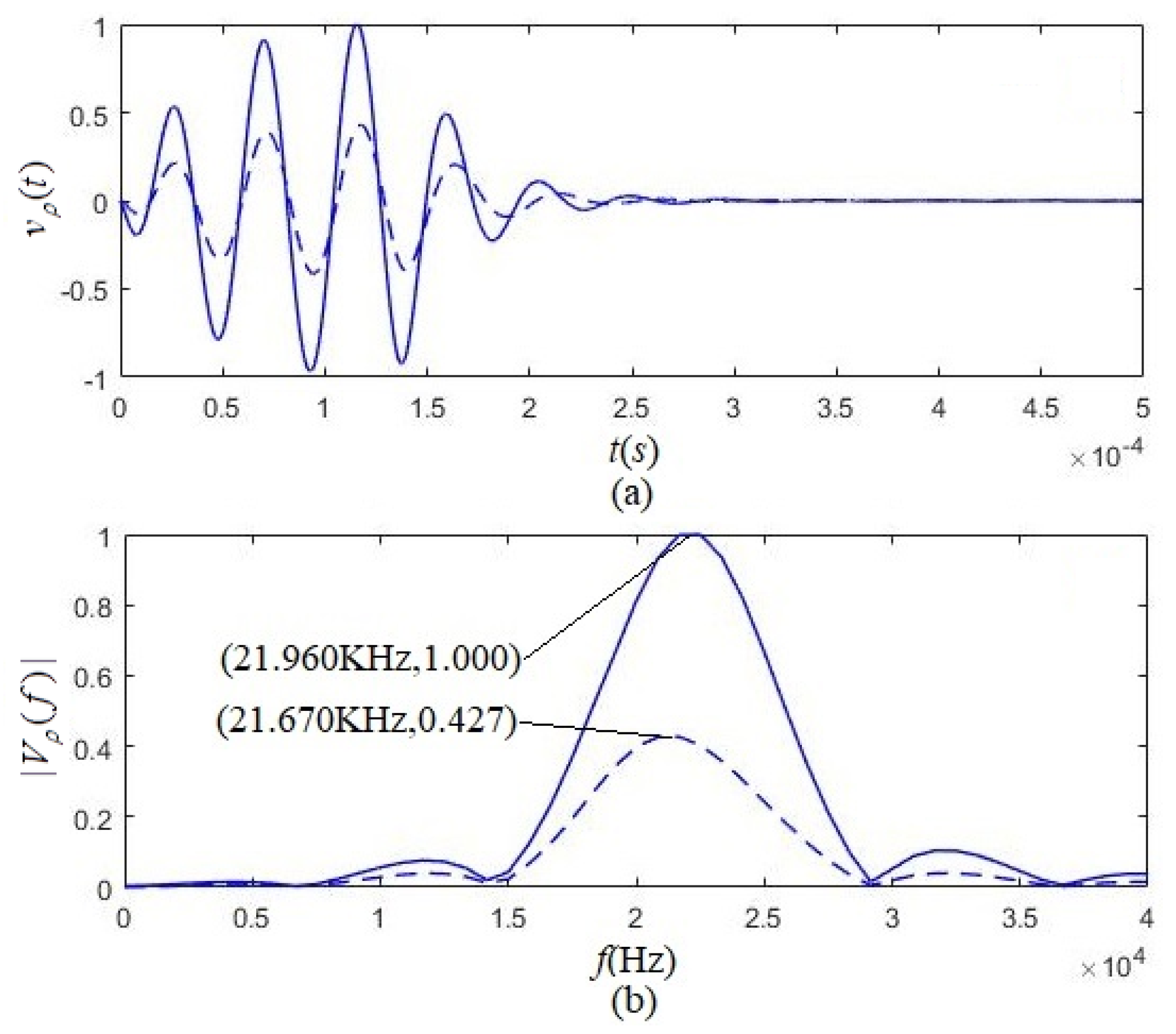
- The radiated acoustic signal is influenced by the shape and size of the transducer, the physical parameters of piezoelectric material, the polarization mode of the transducer, and the driving-voltage signal. For transducers of the same size and identical piezoelectric material, the efficiency of the acoustic signal radiated by the tangentially polarized thin cylindrical transducer is much higher than that emitted by the radially polarized thin cylindrical transducer. Using the tangentially polarized thin cylindrical transducers as sensors in the acoustic-logging tool would significantly improve the measured acoustic-logging signal-to-noise ratio.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Meng, X.L. Atmospheric sound and nonlinear sound. J. Shandong Norm. Univ. (Nat. Sci.) 1996, 11, 44–46. [Google Scholar]
- Ding, D.; Ni, S.D.; Tian, X.F. Progress in Research on Earthquake-Related Sounds. South China J. Seismol. 2010, 30, 46–53. [Google Scholar]
- Li, Q.H. Advances of research work in underwater acoustics. Acta Acust. 2001, 26, 295–301. [Google Scholar]
- Yan, Y.H. Speech acoustics: Latest applications. Acta Acust. 2010, 35, 241–247. [Google Scholar]
- Penar, W.; Magiera, A.A.; Klocek, C. Applications of bioacoustics in animal ecology. Ecol. Complex. 2020, 43, 100847. [Google Scholar] [CrossRef]
- Cardoni, A.; Lucas, M.; Cartmell, M.; Lim, F. A novel multiple blade ultrasonic cutting device. Ultrasonics 2004, 42, 69–74. [Google Scholar] [CrossRef] [PubMed]
- Bain, G.; Bearcroft, P.W.; Berman, L.H.; Grant, J.W. The use of ultrasound-guided cutting-needle biopsy in paediatric neck masses. Eur. Radiol. 2000, 10, 512–515. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Palaniswami, M.S. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef] [Green Version]
- Tadigadapa, S.; Mateti, K. Piezoelectric MEMS sensors: State-of-the-art and perspectives. Meas. Sci. Technol. 2009, 20, 092001. [Google Scholar] [CrossRef]
- Przybyla, R.J.; Tang, H.Y.; Guedes, A.; Shelton, S.E.; Horsley, D.A.; Boser, B.E. 3D ultrasonic rangefinder on a chip. IEEE J. Solid State Circuits 2015, 50, 320–334. [Google Scholar] [CrossRef]
- Lu, Y.; Tang, H.; Fung, S.; Wang, Q.; Tsai, J.; Daneman, M.; Boser, B.; Horsley, D. Ultrasonic fingerprint sensor using a piezoelectric micromachined ultrasonic transducer array integrated with complementary metal-oxide semiconductor electronics. Appl. Phys. Lett. 2015, 106, 263503. [Google Scholar] [CrossRef] [Green Version]
- He, Q.; Liu, J.; Yang, B.; Wang, X.; Chen, X.; Yang, C. MEMS-based ultrasonic transducer as the receiver for wireless power supply of the implantable microdevices. Sens. Actuators A Phys. 2014, 219, 65–72. [Google Scholar] [CrossRef]
- Williams, W. Acoustic Radiation from a Finite Cylinder. J. Acoust. Soc. Am. 1964, 36, 243–248. [Google Scholar] [CrossRef]
- Fenlon, F.H. Calculation of the acoustic radiation field at the surface of a finite cylinder by the method of weighted residuals. Proc. IEEE 1969, 57, 291–306. [Google Scholar] [CrossRef]
- Wang, C.; Lai, J.C.S. The Sound Radiation efficiency of finite length acoustically thick circular cylindrical shells under mechanical excitation I: Theoretical analysis. J. Sound Vib. 2000, 232, 431–447. [Google Scholar] [CrossRef]
- Li, R.J.; Zhao, P.; Wang, Y.B. Research on Measurement Method of Electroacoustic Efficiency of Spherical Shell Transducer. Acta Metrol. Sin. 2020, 41, 1521–1528. [Google Scholar]
- Adelman, N.T.; Stavsky, Y.; Segal, E. Axisymmetric vibrations of radially-polarized piezoelectric ceramic cylinders. J. Sound Vib. 1975, 38, 245–254. [Google Scholar] [CrossRef]
- Adelman, N.T.; Stavsky, Y. Vibrations of radially-polarized composite piezoceramic cylinders and disks. J. Sound Vib. 1975, 43, 37–44. [Google Scholar] [CrossRef]
- Wang, H.Z. Theory of Tangentially-polarized Piezoceramic Thin Circular Tube Transducers. J. Shanghai Jiaotong Univ. 1983, 1, 39–55. [Google Scholar]
- Piquette, J.C. Method for transducer suppression. I: Theory. J. Acoust. Soc. Am. 1992, 92, 1203–1213. [Google Scholar] [CrossRef] [Green Version]
- Piquette, J.C. Method for transducer suppression. II: Experiment. J. Acoust. Soc. Am. 1992, 92, 1214–1221. [Google Scholar] [CrossRef]
- Fa, L.; Mou, J.P.; Fa, Y.X.; Zhou, X.; Zhao, M.S. On Transient Response of Piezoelectric Transducers. Front. Phys. 2018, 6, 00123. [Google Scholar] [CrossRef]
- Fa, L.; Tu, N.; Qu, H.; Wu, Y.R.; Zhao, M.S. Physical Characteristics of and Transient Response from Thon cylindricalal Piezoelectric Transducers Used in a Petroleum Logging Tool. Micromachines 2019, 10, 804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Camp, L. Underwater Acoustics; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1971; pp. 140–142. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Symbol | Unit | Value |
|---|---|---|
| 16.5 | ||
| 20.7 | ||
| −274 | ||
| 593 | ||
| 21 | ||
| 35 | ||
| 425 | ||
| 856.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fa, L.; Kong, L.; Gong, H.; Li, C.; Li, L.; Guo, T.; Bai, J.; Zhao, M. Numerical Simulation and Experimental Verification of Electric–Acoustic Conversion Property of Tangentially Polarized Thin Cylindrical Transducer. Micromachines 2021, 12, 1333. https://doi.org/10.3390/mi12111333
Fa L, Kong L, Gong H, Li C, Li L, Guo T, Bai J, Zhao M. Numerical Simulation and Experimental Verification of Electric–Acoustic Conversion Property of Tangentially Polarized Thin Cylindrical Transducer. Micromachines. 2021; 12(11):1333. https://doi.org/10.3390/mi12111333
Chicago/Turabian StyleFa, Lin, Lianlian Kong, Hong Gong, Chuanwei Li, Lili Li, Tuo Guo, Jurong Bai, and Meishan Zhao. 2021. "Numerical Simulation and Experimental Verification of Electric–Acoustic Conversion Property of Tangentially Polarized Thin Cylindrical Transducer" Micromachines 12, no. 11: 1333. https://doi.org/10.3390/mi12111333
APA StyleFa, L., Kong, L., Gong, H., Li, C., Li, L., Guo, T., Bai, J., & Zhao, M. (2021). Numerical Simulation and Experimental Verification of Electric–Acoustic Conversion Property of Tangentially Polarized Thin Cylindrical Transducer. Micromachines, 12(11), 1333. https://doi.org/10.3390/mi12111333