Highlights
What are the main findings?
- A Zoned Collaborative Self-Calibration architecture is proposed for uncooled infrared cameras, utilizing alternate observations of internal/external blackbodies and a Masked Zone to correct calibration degradation and background drift in real-time.
- Ground validation experiments demonstrate that the proposed method suppresses background radiation drift by over 72%. Dual-camera cross-validation shows that the equivalent blackbody temperature retrieval errors for low-temperature targets (230–250 K) were significantly reduced from approximately 3 K to roughly 0.4 K. The absolute expanded uncertainty is evaluated to be better than 0.87 K (k = 2) at 300 K.
What are the implications of the main findings?
- This approach transforms traditional serial calibration into a parallel operation, enabling continuous high-precision monitoring of moving orbital components without the need for complex scanning mechanisms.
- The method effectively overcomes the sensitivity of uncooled detectors to orbital thermal environment fluctuations, providing a compact and reliable technical solution for space-based quantitative remote sensing.
Abstract
This study proposes a self-calibration method based on zoned reference transfer for real-time temperature monitoring of the Fengyun-4 (FY-4) Microwave Satellite payload. It aims to correct the effects of calibration coefficient degradation and instrumental background drift in uncooled infrared temperature measurement systems during on-orbit operation. The method dynamically updates the calibration reference through alternate observations of a Fixed External Blackbody and an Insertable Internal Blackbody within the field of view. Concurrently, it utilizes Masked Zone pixels to sense and compensate in real-time for the common-mode background drift caused by camera temperature variations. This approach jointly ensures long-term measurement stability and instantaneous accuracy without the need for complex scanning mechanisms. Ground validation experiments demonstrate that the proposed method suppresses background radiation drift by over 72%. Under dual-camera cross-validation, the equivalent blackbody temperature retrieval errors for low-temperature targets (230–250 K) were significantly reduced from approximately 3 K to roughly 0.4 K. Furthermore, based on a comprehensive uncertainty budget, the absolute expanded uncertainty is evaluated to be better than 0.87 K (k = 2) at 300 K. The proposed method provides a reliable and compact technical solution for high-precision infrared thermometry of moving components on-orbit.
1. Introduction
The Microwave Quasi-optical Feed Network serves as the core payload of the FY-4 Microwave Satellite, enabling high-precision vertical profiling of atmospheric temperature and humidity. The Rotating Scanning Mirror is a key component of this instrument; acquiring high-accuracy real-time temperature data from the mirror is essential for correcting pointing errors caused by thermal deformation.
Contact-based sensing is avoided for the high-speed scanning mirror to eliminate mechanical interference. Physical connections would introduce parasitic torque and disrupt the mirror’s dynamic balance, thereby compromising pointing accuracy [1]. Furthermore, the inherent mechanical wear of rotating interfaces (e.g., slip rings) limits the long-term operational reliability required for space missions [2]. Non-contact infrared thermography offers an ideal solution, effectively circumventing measurement interference from physical contact. This study has developed an Uncooled Infrared Temperature Measurement Camera (UITMC) based on an uncooled infrared focal plane array (IRFPA) detector, featuring compact size, low mass, and low power consumption, making it particularly suitable for space applications [3,4,5].
However, the UITMC’s temperature fluctuates under the influence of the complex orbital thermal environment. Uncooled IRFPAs are extremely sensitive to such temperature variations, causing nonlinear drift in radiometric response and temporal changes in the spatial non-uniformity of the IRFPA [6,7]. The coupling of these two temperature-induced effects constitutes a significant source of measurement error, presenting a major bottleneck limiting the broader application of uncooled infrared systems in high-precision space observation missions [5]. Implementing effective on-orbit radiometric calibration is therefore crucial for correcting temporal detector performance deviations, suppressing environmental interference, and achieving high-precision measurement [8].
Current on-board radiometric calibration techniques primarily follow two strategies: (i) Traditional periodic calibration: this approach typically employs a scanning or moving mechanism to periodically switch the instrument’s field of view (FOV) away from the target to observe a known radiation reference, such as deep cold space or a cavity blackbody, thereby updating the absolute calibration coefficients [9,10,11]. (ii) Model-based compensation: this strategy involves attaching multiple high-precision temperature sensors across the optical and structural components of the camera to monitor their real-time thermal states. These distributed temperature readings are then fed into a pre-established mathematical model to calculate and subtract the background stray radiation [12,13,14,15].
Yet, for the scenario addressed in this study—continuous temperature measurement of a moving part—the UITMC cannot alternate between viewing the target and a calibration source (e.g., cold space, cavity blackbodies) as conventional remote sensing payloads do, making the traditional periodic calibration scheme inapplicable. The latter model-based compensation is usually complex, relying on accurate monitoring and fitting of temperatures from multiple components, and its engineering implementation is challenging under the strictly limited on-board real-time processing capability and computational resources [16,17,18].
To overcome these limitations, this paper proposes a Zoned Collaborative Self-Calibration architecture for temperature measurement of moving components. The innovations of this method are twofold: (1) A Reference Zone observing a fixed external blackbody is established within the UITMC’s FOV. Through alternate observations with an insertable internal blackbody, on-orbit transfer and updating of calibration coefficients are achieved, correcting long-term drift. (2) A Masked Zone under the same external blackbody serves as a probe for common-mode background drift, enabling real-time sensing and compensation of instantaneous full-array drift caused by camera body temperature variations.
Distinct from conventional periodic calibration or model-based compensation, this approach represents a paradigm shift from serial to parallel calibration. It obviates the need for complex FOV-switching mechanisms, bulky cavity blackbodies, or extensive arrays of high-precision temperature sensors, thereby significantly reducing hardware complexity. This strategy of synchronous parallel processing and low-frequency correction provides an efficient solution for high-precision, long-life quantitative observation of dynamic targets using uncooled infrared detectors. Furthermore, it offers a universal solution for SWaP (Size, Weight, and Power)-constrained platforms, such as small satellites or CubeSats, enabling uninterrupted monitoring in high-dynamic environments.
2. Materials and Methods
2.1. Instrument Description of the UITMC
The challenges and technical workflow of UITMC are illustrated in Figure 1 below.
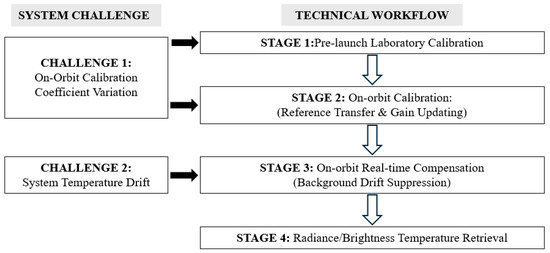
Figure 1.
Challenges and Technical Workflow of UITMC.
As illustrated in Figure 1, the Zoned Collaborative Self-Calibration architecture is specifically designed to address two primary system challenges through a cohesive four-stage technical workflow:
- Challenge 1: On-Orbit Calibration Coefficient Variation. The transition from the pre-launch ground environment to complex space conditions changes the sensor’s radiometric responsivity. To overcome this, Stage 1 (Pre-launch Laboratory Calibration) first establishes the baseline radiometric response and spatial non-uniformity. Subsequently, Stage 2 (On-Orbit Calibration) periodically utilizes the internal and external blackbodies to dynamically update the absolute calibration coefficients.
- Challenge 2: Variations in the orbital thermal environment induce instrument temperature fluctuations, causing internal stray radiation drift that couples with the target signal. Through Stage 3, the Masked Zone is utilized to sense and compensate for this common-mode background drift.
The first three stages effectively resolve the two primary challenges faced by the system, culminating in the radiance and brightness temperature retrieval executed in Stage 4.
The UITMC consists of three primary modules: a detector module, a calibration assembly, and an optical imaging module. The IRFPA detector is employed to convert incident infrared radiation into electrical signals. The calibration assembly comprises both internal and external blackbodies. The optical module achieves full coverage of the observed target area. Simultaneously, a specially designed lens hood at the front of the optical path intentionally masks the detector’s outer edge pixels.
Based on the optical system configuration, the detector focal plane is functionally partitioned into three distinct but synergistic zones: Reference Zone, Masked Zone, and Observation Zone. Figure 2 illustrates the focal-plane partitioning scheme and the structural layout of the calibration subsystem.
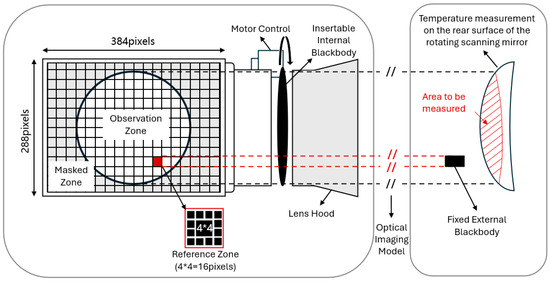
Figure 2.
UITMC’s Function Zone Diagram.
- The Reference Zone consists of a group of designated pixels whose FOV continuously points to a Fixed External Blackbody (emissivity > 0.97) with known and highly stable temperature. Serving as the “hub” of reference transfer, this zone alternates comparisons with the Insertable Internal Blackbody (emissivity > 0.97) to achieve on-orbit updating and transfer of absolute radiometric calibration coefficients. Both the internal and external blackbodies are monitored by temperature sensors with a measurement uncertainty of better than 0.05 K;
- The Masked Zone is located at the edge of the FOV, where pixels are covered by a lens hood (emissivity > 0.95), acting as a “common-mode background drift sensor.” Because the theoretical radiance received is constant, low-frequency variations in its output can be attributed to array-wide common-mode background drift caused by temperature fluctuations of the camera body, thus providing accurate estimates for real-time compensation;
- The Observation Zone spans the main IRFPA pixels and is responsible for continuous imaging and temperature monitoring of the Rotating Scanning Mirror.
The calibration assembly comprises an insertable internal blackbody and a fixed external blackbody (both of which are area blackbodies). The insertable internal blackbody is positioned within the main optical path and can be driven into and out of the path via a high-precision stepper motor. The fixed external blackbody is integrated at an appropriate location on the observation platform, providing a stable radiation reference source for the reference zone. Both blackbodies are equipped with high-accuracy temperature sensors for real-time monitoring, ensuring radiometric traceability and accuracy.
The reference zone ensures the long-term accuracy of the calibration reference, while the masked zone guarantees the instantaneous stability of the measurement signal. Together, they support the observation zone in achieving high-precision and high-reliability temperature monitoring of the scanning mirror.
2.2. Pre-Launch and Simulated On-Orbit Calibration Principles
2.2.1. Pre-Launch Laboratory Calibration
Pre-launch calibration is the initial step for establishing the radiometric response reference of a remote sensor and generally provides the highest accuracy [19,20]. Its main objectives are to determine the response linearity of the detector and to establish an accurate conversion relationship between the detector output Digital Number (DN) and the radiance of the observed target, thereby providing a reliable initial reference for subsequent on-orbit calibration [19]. For the infrared band, blackbody radiation sources are commonly used as standard sources. This system adopts a near-field extended-source calibration method: a large-aperture Extended-Area Blackbody (EAB) is placed inside a vacuum chamber and aligned with the camera entrance pupil to simulate the on-orbit space environment (high vacuum, low background) [19,21]. By varying the blackbody temperature and measuring the camera output at different known radiance levels, absolute radiometric calibration is achieved.
For a radiometric measurement system with linear response, the radiometric calibration equation can be written as
Here, is the raw output of pixel ; is the radiometric gain of that pixel; is the effective target radiance at the camera entrance pupil; and is the offset term of the response curve, which mainly accounts for background contributions such as detector dark current and stray radiation from the optical system.
Inside the vacuum chamber, the entire array is illuminated by a high-accuracy EAB, and the radiometric gain for each pixel is derived using a multi-point per-pixel calibration procedure with linear regression based on the least-squares method:
In Equation (2), is the blackbody radiance at the k-th temperature point, calculated from Planck’s law; is the mean radiance over all temperature points; is the pixel output at the k-th temperature; and is the average output of that pixel over all temperature points. For a set of pixels forming the reference zone , the mean radiometric gain within this zone is defined as the reference zone radiometric gain :
Here, is the number of pixels in the reference zone.
Subsequently, for each pixel , the relative radiometric gain , is computed as the ratio between its radiometric gain and the reference zone radiometric gain:
This ratio characterizes the Non-Uniformity (NU) of the focal plane array. The non-uniformity of a focal plane array comprises both static and dynamic components. The static baseline, determined by material properties, structural geometry, and readout circuits, is established during fabrication and can be treated as an intrinsic term in calibration transfer [22]; whereas the dynamic drift in gain and offset induced by thermal fluctuations is mitigated through active temperature control within ±0.1 K. Under such conditions, the relative responsivity matrix () remains stable, enabling high-fidelity transfer of the radiometric reference from the reference zone to the entire array.
2.2.2. On-Orbit Calibration: Reference Transfer and Radiometric Gain Updating
The transition from the pre-launch ground environment to complex space conditions, coupled with the long-term aging of the detector, inevitably shifts the sensor’s radiometric responsivity, making on-orbit calibration essential [23,24]. To fulfill this critical requirement, this paper innovatively proposes a Zoned Collaborative Self-Calibration architecture. Overcoming the stringent SWaP constraints that preclude traditional cavity blackbodies or complex motion mechanisms, this method relies solely on a simple insertable internal blackbody and a fixed external blackbody. By utilizing a Reference Zone to alternately observe these two lightweight components, the system successfully achieves the on-orbit updating and transfer of absolute radiometric calibration coefficients.
The on-orbit calibration procedure the UITMC is as follows:
- 1.
- Observation of the Insertable Internal Blackbody: at regular intervals (every 30 min), the Insertable Internal Blackbody is driven into the optical path so that the reference zone pixels observe it, yielding the signal . The radiance of this Insertable Internal Blackbody , is calculated from its temperature and emissivity using Planck’s law;
- 2.
- Observation of the Fixed External Blackbody: the Insertable Internal Blackbody is removed from the optical path, allowing the reference zone pixels to view the Fixed External Blackbody and produce the signal . Its radiance is obtained from the Fixed External Blackbody temperature and emissivity using Planck’s law;
- 3.
- Reference zone radiometric gain update: the radiometric gain of the reference zone under the current on-orbit condition, , is recalculated using:
- 4.
- Full-array radiometric gain update: using the relative radiometric gain obtained in the laboratory, the radiometric gain of each pixel in the array is updated as:
The temperature difference () between the internal and external blackbodies is a critical parameter in the two-point calibration process. A narrow yields a small denominator in Equation (5), which amplifies the detector’s intrinsic temporal noise and degrades calibration precision. Conversely, an excessively large requires high heating temperatures that pose on-orbit thermal hazards to surrounding payload components and risk pushing the detector’s response into a non-linear region. Therefore, based on engineering experience, the internal blackbody is dynamically heated to maintain an optimal of 20–50 K, which effectively balances calibration precision, system linearity, and thermal safety.
- 5.
- Full-array offset update: based on observations with the Insertable Internal Blackbody inserted, the offset of each pixel is updated so that all pixels yield consistent DN values when viewing the Insertable Internal Blackbody of fixed radiance:
Here, is the raw output of pixel when observing the Insertable Internal Blackbody. This step effectively compensates for background signal shifts caused by dark-current drift, changes in optical stray radiation, and other factors. At this point, the calibration coefficients of the entire array are updated, ensuring the long-term accuracy of the calibration reference.
2.2.3. On-Orbit Real-Time Compensation: Suppression of Common-Mode Background Drift
For UITMC, the internal thermal radiation emitted by the system itself is received by the detector, constituting a stray background that interferes with the detection of the valid target signal. This interference can, in severe cases, obscure or even overwhelm the target radiance signal, leading to a significant degradation in measurement accuracy. Therefore, the effective separation of background radiation from the target signal and its subsequent real-time compensation are of critical importance for ensuring measurement precision.
To analyze and mitigate this interference, the total radiance signal received by the detector of UITMC can be decomposed. The general expression is as follows [25]:
Here, is the raw output of pixel at time ; is the effective signal from the observed target; is the background-induced offset, including contributions from background drift due to changes in the temperature field as well as inseparable biases such as dark current and random noise; is the pixel radiometric gain, which inherently incorporates the optical system transmittance; is the target surface emissivity; is the equivalent blackbody radiance corresponding to the target temperature ; and is the pixel offset.
In this system, a Masked Zone is defined within the IRFPA. This zone consists of pixels covered by a baffle with known temperature and fixed emissivity . The actual output of the Masked Zone pixels, , can be written as
Here, is the radiometric gain of the Masked Zone pixels; is their offset; and is the signal offset induced by background drift in the Masked Zone.
Since the mask temperature and emissivity are known, its radiance can be calculated using Planck’s law. Together with the Masked Zone radiometric gain and offset obtained in laboratory calibration, the expected theoretical signal for the Masked Zone can be computed as
Following on-orbit calibration, the arithmetic mean of the masked-zone signals from the first ‘n’ sampling moments is taken as the theoretical reference value. This establishes a stable baseline during the initial phase when background drift is not yet significant, while simultaneously suppressing the influence of random noise through averaging.
During on-orbit operation, the deviation between the actual Masked Zone signal and its expected value reflects the signal shift caused by background drift in the Masked Zone, namely
The output signal of each detector pixel after background drift compensation can be modeled as
where is real-time compensated target signal, and represents the background drift induced by variations in the camera body temperature .
Based on the assumption that the background drift exhibits a common-mode characteristic across the entire focal plane array, the drift for all pixels can be estimated using the signal drift from the masked-zone pixels, :
Consequently, the real-time compensated signal is calculated as
Substituting the original signal model, which comprises both the target signal and the background drift, into Equation (14) and incorporating the common-mode estimation from Equation (13), yields
Equation (15) demonstrates that the compensated signal effectively removes the background drift, closely approximating the true target signal . This signal is then used for radiometric inversion with the on-orbit updated calibration coefficients to obtain the equivalent blackbody radiance of the target:
Here, and are the on-orbit calibrated gain and offset coefficients, respectively, and ε is the emissivity of the target surface.
Finally, the current temperature distribution of the observed target is determined by matching the real-time inverted matrix against a pre-calibrated Temperature versus Equivalent Blackbody Radiance look-up table.
2.2.4. Complete Processing Pipeline
The complete processing flow is shown in Figure 3 below.
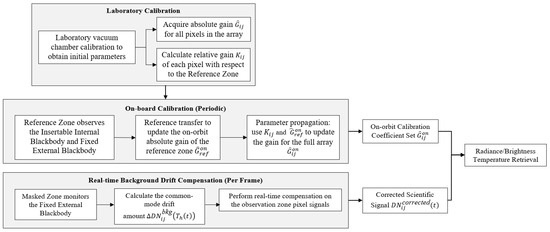
Figure 3.
Self-Calibration Method Flowchart.
3. Results
3.1. Laboratory Calibration Test
Laboratory radiometric calibration results indicate that the UITMC exhibits excellent linear response behavior over the range 280–335 K. As listed in Table 1, the blackbody radiance at the six calibration temperatures spans from 1.3160 × 10−2 to 2.7310 × 10−2 W·cm−2·sr−1·μm−1, and the system maintains stable radiometric response at all temperature points.

Table 1.
Temperature and Radiance of the Laboratory Blackbody.
Using the mean spectral radiance of the ground-based blackbody as the abscissa and DN from the UITMC as the ordinate, linear fitting yields the per-pixel radiometric calibration curves and coefficients.
Figure 4 presents the radiometric calibration curves for the (a) Masked Zone, (b) Reference Zone, and (c) Observation Zone, along with (d) the relative responsivity map of a representative 30 × 60-pixel subarray. The normalized relative response curves and the data in the figure and table are derived from statistical analysis of a representative 30 × 60-pixel subarray (about 1.6% of the full 384 × 288 array), which is sufficient to reflect the overall response characteristics of the entire IRFPA.
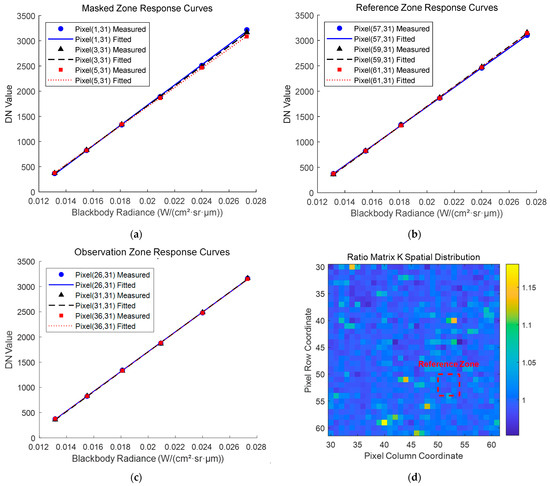
Figure 4.
Calibration results: (a) asked Zone response curves; (b) Reference Zone response curves; (c) Observation Zone response curves; (d) relative responsivity map.
As quantitatively summarized in Table 2, the calibration results demonstrate the good intrinsic linearity of the UITMC’s radiometric response. The linear fitting model yields a high coefficient of determination (). These metrics confirm that the linear equation provides a highly accurate and robust description of the system’s baseline radiometric model.
Table 2.
Radiometric Calibration Coefficients and Linear Fitting Statistics for Sampled Pixels Across the Three Functional Zones.
To objectively and quantitatively evaluate the fitting accuracy of the radiometric response model, the radiance of the ground-based blackbody computed from the calibration equation is compared with the true radiance, and the relative deviation is defined as in Equation (17) [20]:
Here, denotes the relative radiance deviation. represents the blackbody radiance computed from the established calibration equation, and is the true theoretical radiance of the reference blackbody derived from its actual temperature using Planck’s law.
As detailed in Table 3, the average brightness temperature deviations across the Masked, Reference, and Observation Zones are 0.0994 K, 0.0189 K, and 0.0513 K, respectively. These results demonstrate the reliability of the pre-launch calibration.
Table 3.
Statistical Evaluation of Radiometric Calibration Fitting Accuracy and Temperature Deviation at an Equivalent Brightness Temperature of 30 °C.
3.2. Vacuum Target Simulation Test
Uncooled infrared detectors are highly sensitive to background thermal radiation within their operating band, and small variations in the thermal background can induce significant fluctuations in the detector response, thereby degrading temperature retrieval accuracy [26,27]. This phenomenon arises from the detector’s response to its own emission and to that of its surrounding environment, constituting one of the major error sources in an infrared temperature measurement system [6].
To simulate the on-orbit thermal environment and validate the proposed compensation method, a target simulation experiment was set up inside a thermal vacuum chamber. The physical configuration of the experiment mainly consisted of the UITMC and a blackbody (emissivity > 0.99). The vacuum chamber was maintained at a high-vacuum state to replicate space conditions and eliminate convective heat transfer. The UITMC was securely mounted to continuously monitor the blackbody. During the 30 min test period, the ambient temperature of the surrounding heat sinks was adjusted to introduce external thermal perturbations, simulating the complex background radiation drift experienced on orbit. The infrared image sequences were continuously acquired at a sampling frequency of 0.5 Hz.
The experiment indicates that the background drift of IRFPA pixels exhibits common-mode characteristics. Figure 5a shows the system response to external perturbations during the final 5 min. The observation data show that the response fluctuations of pixels in the Masked Zone and the Observation Zone share a similar trend. Furthermore, as illustrated in the cross-zone correlation matrix in Figure 5b, the correlation coefficients between the sampled pixels in these two regions exceed 0.98. These results support the common-mode nature of the background drift.
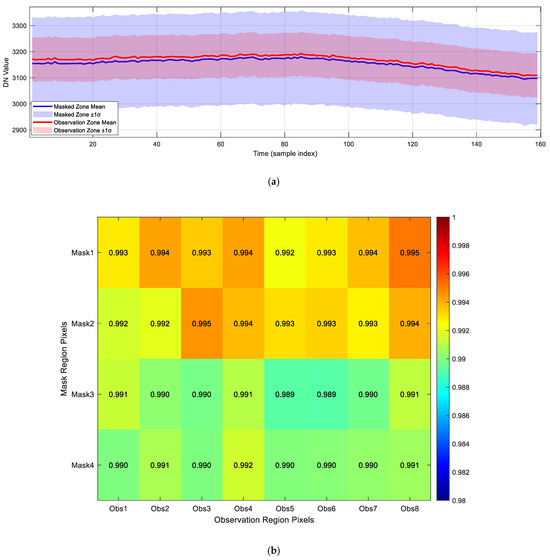
Figure 5.
Common-mode characteristics test result: (a) fluctuation curve of DN values for pixels in the Observation Zone and Masked Zone during the last 5 min; (b) cross-zone correlation matrix.
Based on the aforementioned common-mode characteristics, this study uses the response fluctuations of Masked Zone pixels to estimate the common-mode background drift and applies the resulting estimate to compensate measurements in the Observation Zone. The results are shown in Figure 6.
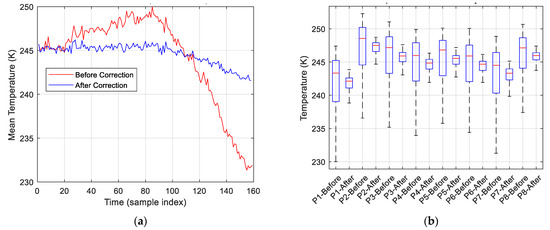
Figure 6.
Common-mode background drift compensation results: (a) time series of the averaged temperature from eight measurement points before and after common-mode background drift compensation; (b) statistical distribution (box plot) of temperature at each measurement point before and after compensation.
The compensation results show that the stability of the temperature time series is significantly improved after drift compensation, effectively suppressing most of the fluctuations caused by variations in the thermal background field. As shown in Table 4, after drift compensation, the average standard deviation of the eight measurement points decreases from 5.03 K (ranging from 4.766 K to 5.243 K) to 1.22 K (ranging from 1.000 K to 1.397 K). These results indicate the effectiveness of the common-mode background drift correction.
Table 4.
Quantitative Assessment of Common-Mode Background Drift Compensation Performance Across the Eight Target Measurement Points.
3.3. Dual-Camera Cross-Validation Experiment
To quantitatively assess the repeatability of the proposed temperature measurement method across different hardware platforms, a dual-platform cross-validation experiment was designed. The experiment was carried out in a vacuum chamber, where two UITMCs simultaneously observed the backside of the same Rotating Scanning Mirror during its operation. To ensure rigorous comparability, two UITMCs were identical in hardware and calibration. Subsequently, a simulated on-orbit calibration procedure was applied to both UITMCs. This involved using the Insertable Internal Blackbody and Fixed External Blackbody to calibrate the Reference Zone pixels and propagating the updated calibration coefficients to the entire array, followed by the common-mode background drift compensation.
The equivalent blackbody brightness temperature on the mirror backside was successfully captured (Figure 7a). The correction results are shown in Figure 7b,c. After applying the proposed method, the equivalent blackbody temperature retrieval errors for low-temperature targets (230–250 K range in this study) from both cameras were significantly reduced from approximately 3 K to roughly 0.4 K. Furthermore, the two sets of retrievals demonstrated excellent agreement. These outcomes validate the high repeatability and robustness of the proposed self-calibration and compensation framework across independent hardware platforms, providing reliable methodological support for the on-orbit temperature monitoring task of the FY-4 Microwave Satellite Rotating Scanning Mirror.
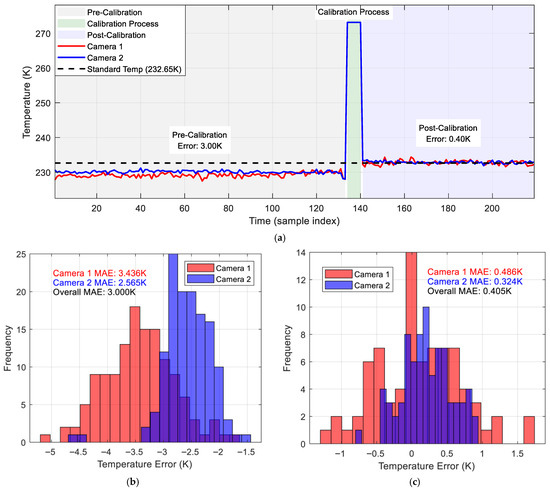
Figure 7.
Dual-camera cross-validation experiment results: (a) temperature readings from two cameras; (b) error spectrum of the two cameras before correction; (c) error spectrum of the two cameras after correction.
4. Discussion
4.1. Summary of Experimental Validation
The experimental phase of this study was systematically designed to validate the Zoned Collaborative Self-Calibration architecture from baseline characterization to simulated on-orbit operation. Initially, laboratory radiometric calibration confirmed the excellent intrinsic linearity of the UITMC across the 280–335 K range, yielding an equivalent brightness temperature deviation of less than 0.36 K. Subsequently, vacuum target simulation tests verified the common-mode nature of the background drift, demonstrating that the proposed masked-zone compensation algorithm effectively suppresses background-induced peak-to-peak temperature fluctuations by over 72%. Finally, dual-camera cross-validation confirmed the cross-platform robustness of the method, reducing the temperature retrieval error for low-temperature dynamic targets (230–250 K) from approximately 3 K to roughly 0.4 K. Collectively, these empirical findings robustly substantiate the theoretical framework of the Zoned Collaborative Self-Calibration architecture, proving that the proposed models provide a highly reliable and practical foundation for high-precision on-orbit temperature monitoring.
4.2. Uncertainty Analysis and Budget
To comprehensively evaluate the measurement reliability of the UITMC system, this study establishes a radiometric temperature measurement uncertainty evaluation model based on the ISO Guide to the Expression of Uncertainty in Measurement (GUM) [28]. The combined standard uncertainty encompasses the full chain of error sources, ranging from the calibration reference baseline to the residuals of the on-orbit compensation algorithm.
The uncertainty of the retrieved target temperature is primarily determined by three categories of components:
- 1.
- Calibration Reference Uncertainty: The accuracy of the platinum resistance temperature sensor is better than 0.05 K (), provided by the platinum resistance calibration certificate. The spectral emissivity of the blackbody was calibrated and provided by the National Institute of Metrology (NIM) of China, with an expanded measurement uncertainty of 0.15% (). By taking the partial derivative of Planck’s integral over the UITMC’s spectral band at a reference temperature of 300 K, the sensitivity coefficient for emissivity was mathematically derived to be approximately 0.656 K/%. Thus, the standard uncertainty contribution of the emissivity is approximately 0.098 K (). Furthermore, the temperature non-uniformity across the blackbody surface, denoted as , is evaluated to be 0.115 K ().
- 2.
- Detector Response Uncertainty: This includes the fitting residual of the calibration model (0.051 K, as shown in Table 3) and the detector’s intrinsic Noise Equivalent Temperature Difference (NETD, approximately 0.06 K).
- 3.
- Drift Compensation Residual: This is the dominant component. Based on the dual-camera cross-validation experiment (Figure 7), after applying the Masked Zone differential algorithm, the system still exhibits a residual deviation of approximately 0.40 K. This component, denoted as , comprehensively reflects the residual common-mode error and spatial non-uniformity drift.
The quantified budget of each error component at a typical target temperature of 300 K is presented in Table 5. The combined uncertainty is given by the square root of the sum of the squares of the individual uncertainty components. The expanded uncertainty is better than 0.87 K () at 300 K.
Table 5.
Uncertainty Budget of the UITMC System ().
4.3. Comparative Advantages of the Zoned Collaborative Self-Calibration Architecture
To explicitly illustrate the structural and operational superiority of the proposed method, Table 6 provides a multidimensional comparative analysis against traditional periodic calibration and model-based compensation strategies.
Table 6.
Comparative analysis of the proposed method versus existing calibration architectures.
As summarized in the table, traditional periodic calibration relies on a “serial” logic that intrinsically interrupts target observation. It also requires bulky cavity blackbodies or complex FOV switching mechanisms, making it highly impractical for continuously monitoring dynamic targets. Alternatively, while model-based compensation avoids observation interruptions, it inherently demands a highly complex network of temperature sensors and significant computational resources. Its real-time performance and precision are fundamentally bottlenecked by the fitting residuals and refresh rate of the thermal model.
In contrast, the proposed zoned collaborative architecture introduces an innovative “parallel” paradigm. By dividing the IRFPA into functional zones, the system leverages a simple insertable internal blackbody and a fixed external reference alongside a dedicated Masked Zone. This design achieves simultaneous target observation and high-frequency common-mode drift compensation with minimal hardware overhead. As a result, it drastically reduces mechanism complexity while elevating real-time measurement precision (expanded uncertainty <0.87 K (k = 2) at 300 K and suppressing >72% of background drift). Therefore, it serves as a reliable and compact technical foundation for future on-orbit non-contact quantitative remote sensing.
4.4. Key Error Sources Affecting Drift Compensation Accuracy
During thermal vacuum ground validation experiments, several key error sources that directly impact the accuracy of the drift compensation model were identified, primarily originating from hardware physical characteristics and algorithmic simplifications:
- 1.
- Non-Common-Mode Errors Introduced by Mask Thermal Characteristics and Hysteresis: The effectiveness of the Masked Zone as a background drift sensor depends on its ability to closely track the instrument’s overall thermal drift without significant thermal hysteresis. Material properties and surface characteristics of the mask may induce localized thermal gradients or hysteresis effects, introducing non-common-mode components. To mitigate this error source, the mask-light shield assembly was fabricated from high thermal conductivity aluminum alloy and coated with high-emissivity black paint (emissivity > 0.95). Additionally, it was thermally mounted to the camera housing to minimize temperature non-uniformity and thermal hysteresis. Consequently, non-common-mode errors introduced by the mask are minimized and treated as second-order terms within the residual uncertainty budget.
- 2.
- Responsivity Matrix Drift Induced by Detector Temperature Sensitivity: The radiometric gain of uncooled detectors is highly sensitive to operating temperature, and severe thermal fluctuations may reshape the responsivity matrix, compromising the stability of the relative responsivity matrix () and subsequently affecting calibration transfer accuracy based on the reference zone. To suppress this error source, the system employs active temperature control to stabilize the detector operating temperature near ambient conditions within ±0.1 K. Under these conditions, the relative responsivity matrix remains stable, and residual response drift exhibits typical common-mode characteristics, thereby minimizing temperature-induced interference with compensation accuracy.
- 3.
- Coupling Error Between Pixel Gain Non-Uniformity and Drift: The current real-time compensation algorithm performs a uniform digital number (DN) offset subtraction. Although computationally efficient, this first-order approximation neglects the inherent coupling between pixel gain non-uniformity and drift. From a radiometric perspective, the equivalent background radiance drift () is related to the individual pixel’s radiometric gain () by . Due to manufacturing non-uniformity, exhibits slight variations across the focal plane, and a uniform corresponds to slightly differing radiance drifts among pixels. This error cannot be effectively corrected by the first-order DN compensation model and constitutes the primary theoretical source of residual errors after correction. Future research will focus on developing pixel-level compensation models directly implemented in the radiance domain to further enhance compensation accuracy.
4.5. Limitations and Perspectives for Future Improvements
This study provides a robust and hardware-efficient solution for high-precision uncooled infrared thermometry on SWaP-constrained platforms. However, several limitations remain that warrant further optimization in subsequent research:
- 1.
- On-Orbit Validation of Relative Gain Matrix Stability: This architecture is based on the assumption that the relative gain of the uncooled detector remains invariant over time. However, during long-term on-orbit operation, periodic variations in the space radiation environment and thermal conditions may induce detector performance degradation, leading to slow drift in the relative gain matrix (). Future work should include thermal cycling, accelerated life tests, and aging experiments to validate the long-term reliability and temporal validity of the stability assumption.
- 2.
- Extension of Calibration Model to Wide Dynamic Range: The current calibration model performs well within a limited temperature range but may be inadequate for the extreme temperature spans encountered in space missions. Future efforts will introduce extended calibration architectures, such as nonlinear polynomial fitting or piecewise linear interpolation, to ensure optimal measurement accuracy across a broader dynamic temperature range.
- 3.
- Evolution of Compensation Algorithm Toward Radiance-Domain Pixel-Level Correction: The existing drift compensation algorithm employs a uniform DN offset subtraction. While computationally efficient, this first-order approximation neglects the coupling effect between pixel gain non-uniformity and drift. Subsequent research will investigate pixel-level compensation models based on the radiance domain, applying unique background radiance correction factors dynamically to individual pixels, thereby further enhancing spatial uniformity.
5. Conclusions
This study addresses the critical challenge of on-orbit temperature monitoring for the FY-4 Microwave Satellite’s rotating scanning mirror by developing and validating an innovative self-calibration framework. Centered on a “Reference-Mask-Observation” partitioned collaborative architecture, the framework functionally divides the focal plane array into complementary zones. This enables real-time radiometric calibration and background drift compensation without interrupting normal observations. Consequently, it transforms the traditional serial “observe-then-calibrate” process into a parallel and synchronous operation, significantly enhancing both the long-term stability and instantaneous accuracy of the system.
Comprehensive ground validation experiments demonstrated excellent radiometric performance. The system exhibited high intrinsic linearity (adjusted R2 > 0.999) over the 280–335 K range, with an equivalent brightness temperature deviation of less than 0.36 K. The proposed common-mode background compensation effectively suppressed temperature fluctuations by over 72%. Furthermore, dual-camera cross-validation confirmed a relative measurement consistency of approximately 0.43 K, while the rigorous uncertainty budget established an absolute expanded uncertainty (k = 2) of 0.87 K@300 K. These results underscore the hardware-efficient robustness of the approach for SWaP-constrained space platforms.
Although the current drift compensation model based on uniform DN offset subtraction has proven to be an efficient and practical first-order approximation, several limitations remain. First, the long-term on-orbit stability of the relative gain matrix () requires further validation through thermal cycling and aging tests. Second, the current calibration model is inadequate for extreme temperature spans, necessitating nonlinear fitting or piecewise linear interpolation architectures. Third, the DN compensation neglects the coupling between pixel gain non-uniformity and drift, motivating future development of radiance domain pixel-level compensation models. Addressing these issues will fully unlock the potential of uncooled infrared technology for deep-space quantitative remote sensing.
Author Contributions
Conceptualization, Y.Z.; methodology, Y.Z., X.L. and J.Q.; software, Y.Z.; validation, Y.Z., J.Q. and X.L.; formal analysis, Y.Z.; investigation, Y.Z.; resources, Y.Z. and C.H.; data curation, Y.Z. and C.H.; writing—original draft preparation, Y.Z.; writing—review and editing, J.Q., X.L. and C.H.; visualization, Y.Z.; supervision, J.Q. and C.H.; project administration, C.H.; funding acquisition, J.Q., X.L. and C.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the State Key Program of National Natural Science of China under Grant 42330110.
Data Availability Statement
The data that support the findings of this study are available from the corresponding authors upon reasonable request.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CMOS | Complementary Metal-Oxide-Semiconductor |
| DN | Digital Number |
| EAB | Extended-Area Blackbody |
| FEA | Finite Element Analysis |
| FOV | Field of View |
| FY-4 | Fengyun-4 |
| GUM | Guide to the Expression of Uncertainty in Measurement |
| IRFPA | Infrared Focal-Plane Array |
| MEMS | Micro-Electromechanical Systems |
| MLI | Multi-Layer Insulation |
| NETD | Noise Equivalent Temperature Difference |
| NIM | National Institute of Metrology |
| NU | Non-Uniformity |
| ROIC | Readout Integrated Circuit |
| SWaP | Size, Weight, and Power |
| UITMC | Uncooled Infrared Temperature Measurement Camera |
References
- Kluk, D.J.; Boulet, M.T.; Trumper, D.L. A high-bandwidth, high-precision, two-axis steering mirror with moving iron actuator. Mechatronics 2012, 22, 257–270. [Google Scholar] [CrossRef]
- Witvoet, G.; Kuiper, S.; Meskers, A. Performance Validation of a High-Bandwidth Fine Steering Mirror for Optical Communications; SPIE: Bellingham, WA, USA, 2019; p. 216. [Google Scholar]
- Wu, W.; Tang, G.; Liu, C.; Li, D.; Cui, Q.; Luo, Y.; Wan, L.; Wang, X.; Zhang, T.; Ding, F.; et al. XingHuan Visible and Uncooled Multispectral Infrared Camera for Wildfire Detection: Algorithm Description and Initial Validation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 20149–20162. [Google Scholar] [CrossRef]
- Lalli, K.; Soenen, S.; Fisher, J.; McGlinchy, J.; Kleynhans, T.; Eon, R.; Moreau, L. VanZyl-1: Demonstrating SmallSat Measurement Capabilities for Land Surface Temperature and Evapotranspiration; SPIE: Bellingham, WA, USA, 2022; Volume 12236. [Google Scholar]
- Ding, F.; Tang, G.; Zhang, T.; Wu, W.; Zhao, B.; Miao, J.; Li, D.; Liu, X.; Wang, J.; Li, C. Spaceborne Lightweight and Compact High-Sensitivity Uncooled Infrared Remote Sensing Camera for Wildfire Detection. Remote Sens. 2025, 17, 1387. [Google Scholar] [CrossRef]
- Gazzano, O.; Chambon, M.; Ferrec, Y.; Druart, G. Long-Term Radiometric Stability of Uncooled and Shutterless Microbolometer-Based Infrared Cameras. Sensors 2024, 24, 6387. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Yang, H.; Li, D.; Hong, Y.; Liu, G.; Chen, X.; Rao, P. Nonuniformity Correction Algorithm for Infrared Image Sequences Based on Spatiotemporal Total Variation Regularization. Remote Sens. 2026, 18, 72. [Google Scholar] [CrossRef]
- Yi-Cheng, S.; Xiong, D.U.N.; Su, Q.I.U.; Li, L.I.; Wei-Qi, J.I.N.; Xia, W. On-orbit non-uniformity correction method for infrared remote sensing systems using controllable internal calibration sources. J. Infrared Millim. Waves 2021, 40, 655–663. [Google Scholar]
- Julia, A.B.; Matthew, M.; Kurtis, T.; Nina, G.R.; Simon, H.; Cody, H.A.; Esad, M. Early radiometric performance of Landsat-9 Thermal Infrared Sensor. In Proceedings of the SPIE; SPIE: Bellingham, WA, USA, 2022; p. 122320U. [Google Scholar]
- Smith, D.; Peters, D.; Nightingale, T.; Pearce, J.; Veltcheva, R. Challenges for In-Flight Calibration of Thermal Infrared Instruments for Earth Observation. Remote Sens. 2020, 12, 1832. [Google Scholar] [CrossRef]
- Xiong, X.; Angal, A.; Chang, T.; Chiang, K.; Lei, N.; Li, Y.; Sun, J.; Twedt, K.; Wu, A. MODIS and VIIRS Calibration and Characterization in Support of Producing Long-Term High-Quality Data Products. Remote Sens. 2020, 12, 3167. [Google Scholar] [CrossRef]
- Liang, X.; Zou, Y.; Han, C.; Li, L.; Zhang, Y.; Yu, J. Radiometric Correction of Stray Radiation Induced by Non-Nominal Optical Paths in Fengyun-4B Geostationary Interferometric Infrared Sounder Based on Pre-Launch Thermal Vacuum Calibration. Remote Sens. 2025, 17, 2828. [Google Scholar] [CrossRef]
- Yang, Z.-H.; Ma, Y.-H.; Guo, J.-G.; Jiang, W.-W.; Geng, A.-H. Analysis and correction of stray thermal radiation in infrared optical systems including an experimental case study. Appl. Opt. 2019, 58, 3582–3588. [Google Scholar] [CrossRef] [PubMed]
- Chengyang, W.; Sitong, X.; Wansheng, X. Spindle thermal error prediction approach based on thermal infrared images: A deep learning method. J. Manuf. Syst. 2021, 59, 67–80. [Google Scholar] [CrossRef]
- Li, Y.; Liu, C.; Meng, X.; Fu, S. Background radiation compensation calibration method for film cooling infrared temperature measurement based on BP neural network. Int. Commun. Heat Mass Transf. 2024, 159, 107998. [Google Scholar] [CrossRef]
- Shi, J.; Xiang, P.; Zhu, Y.; Sun, R.; Teng, X.; Zhao, D.; Zhou, H. Adaptive Non-Uniformity Correction and Temperature Drift Compensation to Improve the Accuracy of Infrared Radiation Measurement. In Proceedings of the IGARSS 2025—2025 IEEE International Geoscience and Remote Sensing Symposium, 3–8 August 2025; IEEE: Piscataway, NJ, USA, 2025; pp. 5286–5290. [Google Scholar]
- Yang, W.; Cao, C.; Huang, P.; Bai, J.; Zhao, B.; Zhu, S.; Jin, H.; Jin, K.; He, X.; Li, C.; et al. Temperature-Automated Calibration Methods for a Large-Area Blackbody Radiation Source. Sensors 2024, 24, 1707. [Google Scholar] [CrossRef] [PubMed]
- Baber, S. The Impact of Radiometric Calibration Error on Earth Observation-Supported Decision Making; Massachusetts Institute of Technology: Cambridge, MA, USA, 2021. [Google Scholar]
- Liu, W.; Li, J.; Zhang, Y.; Zhao, L.; Cheng, Q. Preflight radiometric calibration of TIS sensor onboard SDG-1 satellite and estimation of its LST retrieval ability. Remote Sens. 2021, 13, 3242. [Google Scholar] [CrossRef]
- Li, X.C.; Cao, Q.; Zhou, S.; Qian, J.; Wang, B.; Zou, Y.; Wang, J.; Shen, X.; Han, C.; Wang, L.; et al. Prelaunch Radiometric Characterization and Calibration of FY-4B GHI Long Wave Infrared Band. Acta Opt. Sin 2023, 43, 1212005. [Google Scholar] [CrossRef]
- Angal, A.; Moyer, D.; Xiong, X.; Link, D.; Schwarting, T.; McIntire, J.; Ji, Q.; Sun, C. JPSS-4 VIIRS Prelaunch Calibration Performance and Assessment; SPIE: Bellingham, WA, USA, 2024; Volume 13192. [Google Scholar]
- Liu, C.; Sui, X.; Gu, G.; Chen, Q. Shutterless non-uniformity correction for the long-term stability of an uncooled long-wave infrared camera. Meas. Sci. Technol. 2018, 29, 025402. [Google Scholar] [CrossRef]
- Wang, W.; Cao, C.; Blonski, S. NOAA-21 VIIRS Thermal Emissive Bands Early On-Orbit Calibration Performance and Improvements. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5006313. [Google Scholar] [CrossRef]
- Wang, W.; Huang, P.; Xu, N.; Li, J.; Di, D.; Zhang, Z.; Gao, L.; Ji, Z.; Min, M. Evaluating the first year on-orbit radiometric calibration performance of GIIRS onboard Fengyun-4B. IEEE Geoscience and Remote Sensing Letters 2024, 21, 1002905. [Google Scholar] [CrossRef]
- Zhang, Z.-N.; Li, L.-B.; Hu, B.-L.; Wang, P.-C.; Yang, Y.; Ke, S.-L.; Wang, S.; Li, S.-Y. Analytical method for calculating internal stray radiation from an IR spectrometer based on the view factor. Appl. Opt. 2023, 62, 725–734. [Google Scholar] [CrossRef] [PubMed]
- Wan, Q.; Brede, B.; Smigaj, M.; Kooistra, L. Factors influencing temperature measurements from miniaturized thermal infrared (Tir) cameras: A laboratory-based approach. Sensors 2021, 21, 8466. [Google Scholar] [CrossRef] [PubMed]
- Strakowski, R.; Wiecek, B. Temperature drift compensation in metrological microbolometer camera using multi sensor approach. In Proceedings of the 13th Quantitative Infrared Thermography Conference (QIRT); NDT.net GmbH & Co. KG: Mayen, Germany, 2016; pp. 791–798. [Google Scholar]
- JCGM 100:2008; Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement. BIPM: Sèvres, France, 2008.







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.