

Deep Learning to Near-Surface Humidity Retrieval from Multi-Sensor Remote Sensing Data over the China Seas

Abstract
1. Introduction
2. Data and Methods
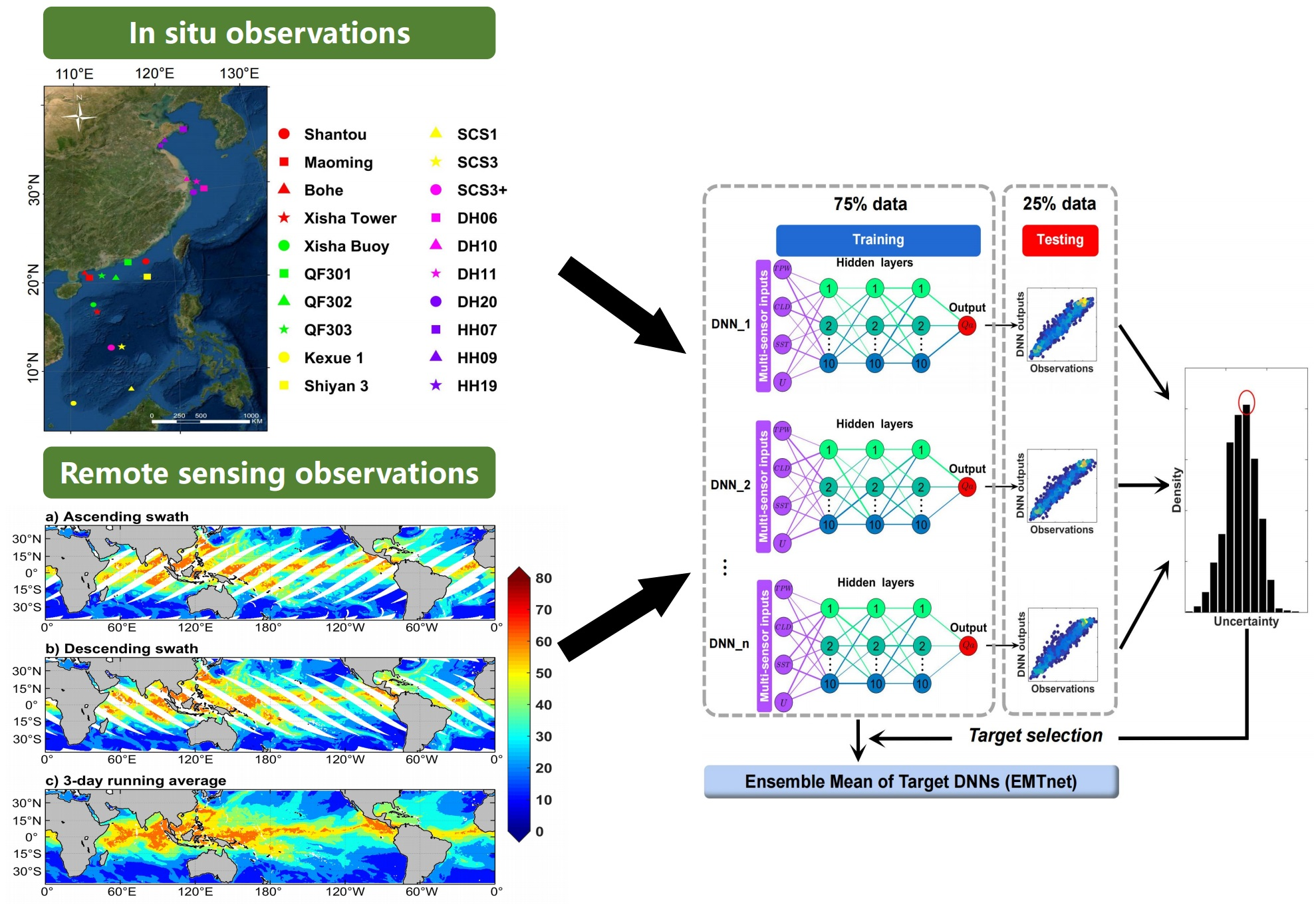
2.1. In Situ Observations
2.2. Remote Sensing Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Equation | RMSE (g/kg) |
|---|---|---|
| Liu et al. (1986) [18] | , where C1 = 0.006088244, C2 = 0.1897219, C3 = 0.1891893, C4 = −0.07549036, and C5 = 0.006088244. | 0.40 in tropics and 0.80 in globe |
| Jones et al. (1999) [23] | , where C0 = 2.1052, C1 = −0.0551, C2 = 0.0138, C3 = 0.2435, and C4 = −0.0019. | 0.77 ± 0.39 |
| Bentamy et al. (2003) [24] | , where C0 = −55.9227, C1 = 0.4035, C2 = −0.2944, C3 = 0.3511, and C4 = −0.2395. | 1.40 |
| Jackson et al. (2006) [25] | , where C0 = −105.117, C1 = 0.31743, C2 = 0.62754, C3 = −0.12056, and C4 = −0.33940. | 0.83 |
| Yu and Jin (2018) [28] | , where a0 = 1423.34, a1 = 0.46967, a2 = 0.43401, a3 = −0.92292, a4 = −11.494, b1 = −0.00071, b2 = −0.00072, b3 = 0.00155, and b4 = 0.02336 for the global model, a0 = −127.10, a1 = −0.21113, a2 = 0.71712, a3 = −0.78268, a4 = 1.1918, b1 = 0.00062, b2 = −0.00139, b3 = 0.00153, and b4 = −0.00222 for the high-latitude model. | 0.82 |
2.3. Reanalysis Data
2.4. Existing Satellite Qa Retrieval Models
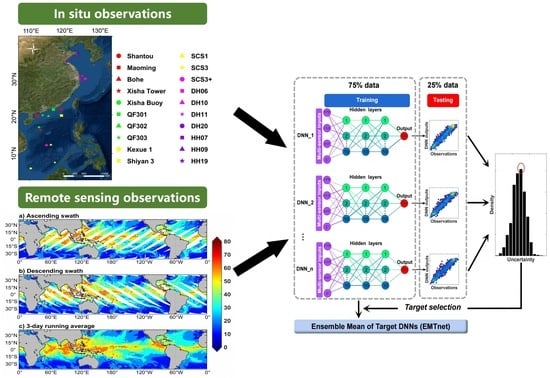
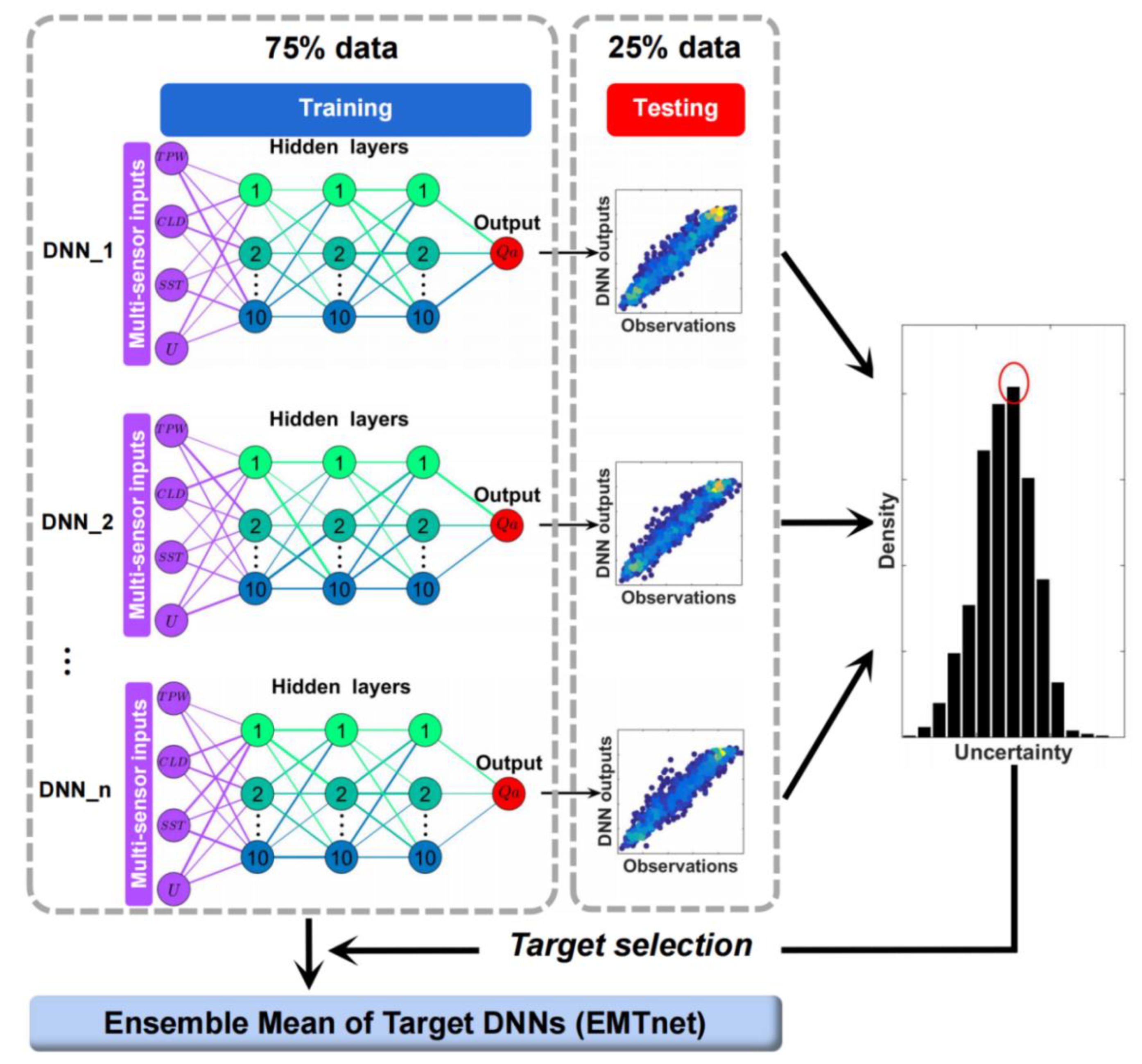
2.5. Ensemble Mean of Target Deep Neural Network Development
3. Results
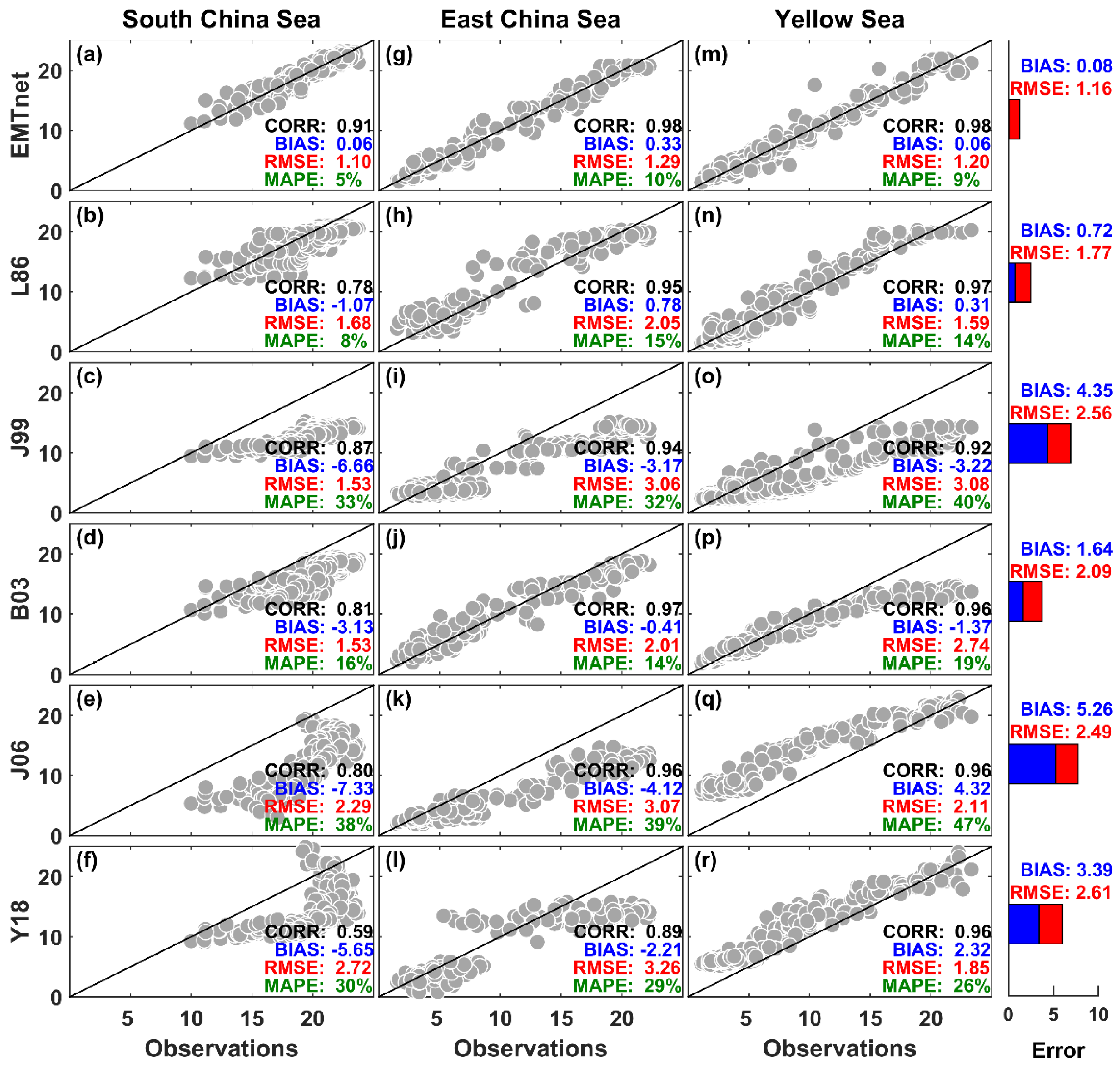
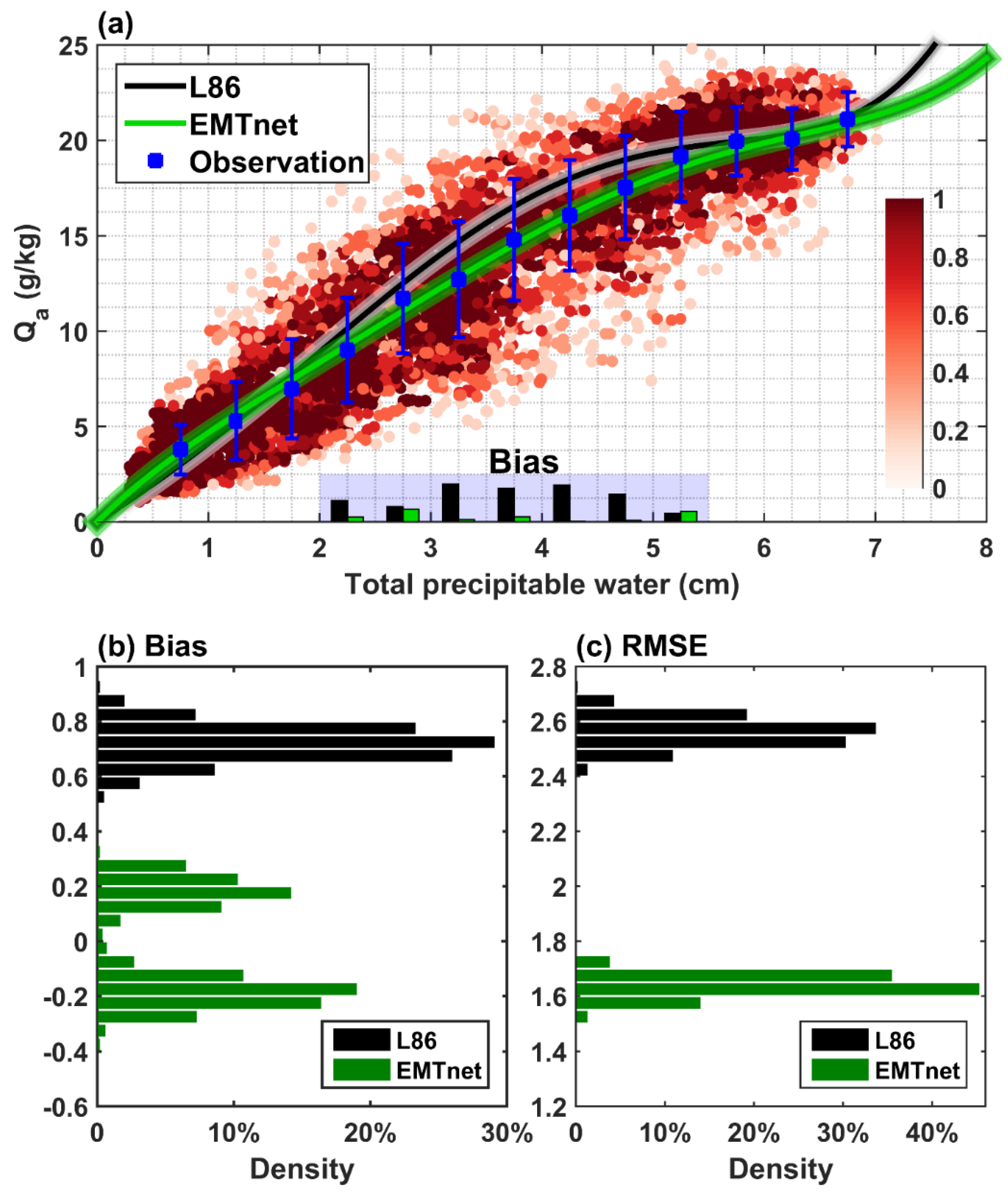
3.1. EMTnet Model Validation
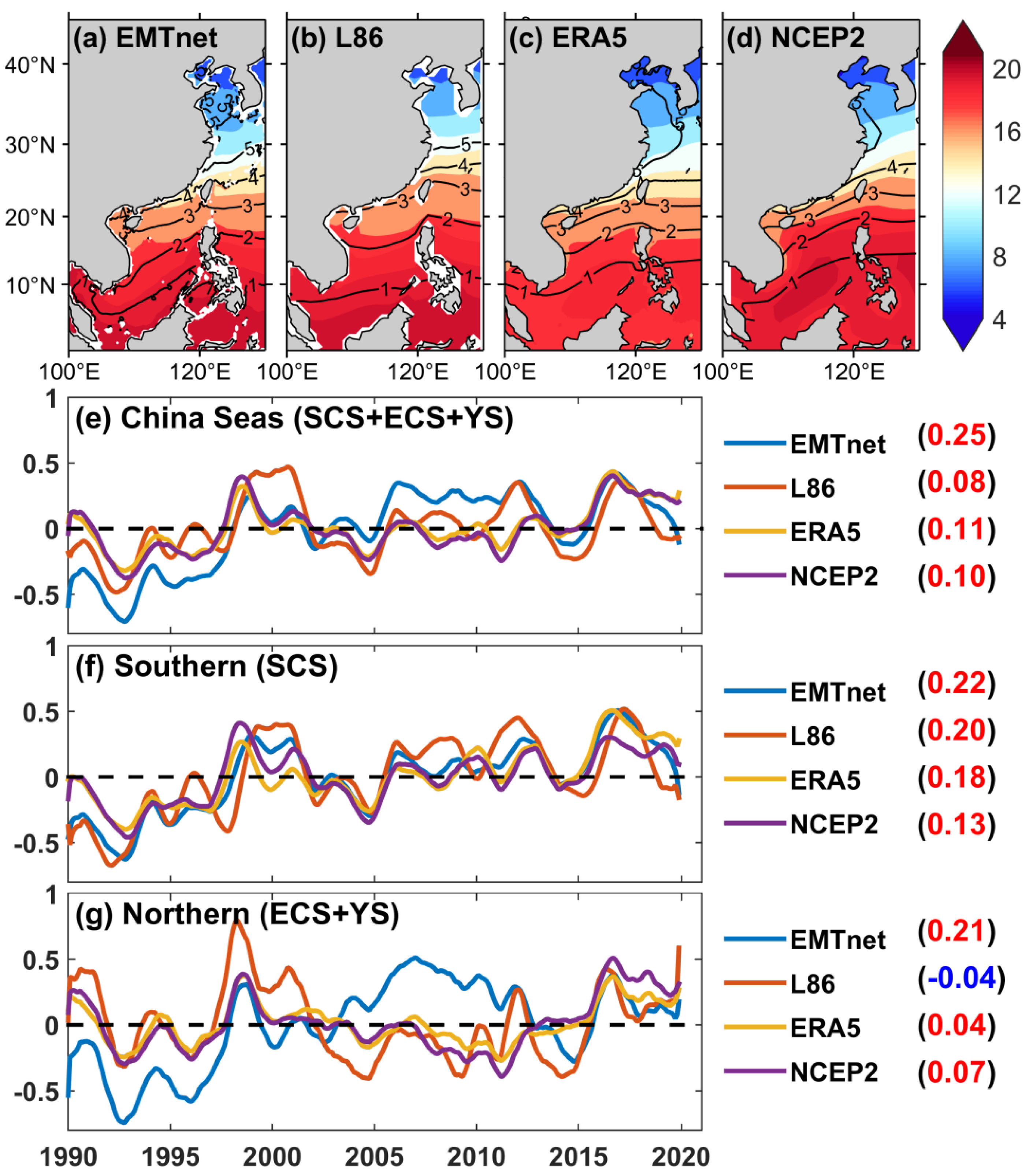
3.2. EMTnet Model Application
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baumgartner, A.; Reichel, E. The World Water Balance; Elsevier: New York, NY, USA, 1975; p. 179. [Google Scholar]
- Chahine, M.T. The hydrological cycle and its influence on climate. Nature 1992, 359, 373–380. [Google Scholar] [CrossRef]
- Trenberth, K.E.; Smith, L.; Qian, T.; Dai, A.; Fasullo, J. Estimates of the global water budget and its annual cycle using observational and model data. J. Hydrometeorol. 2007, 8, 758–769. [Google Scholar] [CrossRef]
- Yu, L. Global variations in oceanic evaporation (1958–2005): The role of the changing wind Speed. J. Clim. 2007, 20, 5376–5390. [Google Scholar] [CrossRef]
- Lorenz, D.J.; DeWeaver, E.T.; Vimont, D.J. Evaporation change and global warming: The role of net radiation and relative humidity. J. Geophys. Res. 2010, 115, D20118. [Google Scholar] [CrossRef]
- Jin, X.; Yu, L.; Jackson, D.L.; Wick, G.A. An improved near-surface specific humidity and air temperature climatology for the SSM/I satellite period. J. Atmos. Ocean. Technol. 2015, 32, 412–433. [Google Scholar] [CrossRef]
- Tomita, H.; Kubota, M.; Cronin, M.F.; Iwasaki, S.; Konda, M.; Ichikawa, H. An assessment of surface heat fluxes from J-OFURO2 at the KEO and JKEO sites. J. Geophys. Res. 2010, 115, C03018. [Google Scholar] [CrossRef]
- Kinzel, J.; Fennig, K.; Schröder, M.; Andersson, A.; Bumke, K.; Hollmann, R. Decomposition of random errors inherent to HOAPS-3.2 near-surface humidity estimates using multiple triple collocation analysis. J. Atmos. Ocean. Tech. 2016, 33, 1455–1471. [Google Scholar] [CrossRef]
- Brunke, M.A.; Wang, Z.; Zeng, X.; Bosilovich, M.; Shie, C.-L. An assessment of the uncertainties in ocean surface turbulent fluxes in 11 reanalysis, satellite-derived, and combined global datasets. J. Clim. 2011, 24, 5469–5493. [Google Scholar] [CrossRef]
- Kent, E.C.; Berry, D.I.; Prytherch, J.; Roberts, J.B. A comparison of global marine surface-specific humidity datasets from in situ observations and atmospheric reanalysis. Int. J. Climatol. 2014, 34, 355–376. [Google Scholar] [CrossRef]
- Robertson, F.R.; Bosilovich, M.G.; Roberts, J.B.; Reichle, R.H.; Adler, R.; Ricciardulli, L.; Berg, W.; Huffman, G.J. Consistency of estimated global water cycle variations over the satellite era. J. Clim. 2014, 27, 6135–6154. [Google Scholar] [CrossRef][Green Version]
- Rodell, M.; Beaudoing, H.K.; L’Ecuyer, T.S.; Olson, W.S.; Famiglietti, J.S.; Houser, P.R.; Adler, R.; Bosilovich, M.G.; Clayson, C.A.; Chambers, D.; et al. The observed state of the water cycle in the early twenty-first century. J. Clim. 2015, 28, 8289–8318. [Google Scholar] [CrossRef]
- Liman, J.; Schröder, M.; Fenning, K.; Andersson, A.; Hollmann, R. Uncertainty characterization of HOAPS 3.3 latent heat-flux-related parameters. Atmos. Meas. Tech. 2018, 11, 1793–1815. [Google Scholar] [CrossRef]
- Roberts, J.B.; Clayson, C.A.; Robertson, F.R. Improving near-surface retrievals of surface humidity over the global open oceans from passive microwave observations. Earth Space Sci. 2019, 6, 1220–1233. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, X.; Wang, C. On the simulations of global oceanic latent heat flux in the CMIP5 multimodel ensemble. J. Clim. 2018, 31, 7111–7128. [Google Scholar] [CrossRef]
- Tomita, H.; Hihara, T.; Kubota, M. Improved satellite estimation of near-surface humidity using vertical water vapor profile information. Geophys. Res. Lett. 2018, 45, 899–906. [Google Scholar] [CrossRef]
- Liu, W.T.; Niiler, P.P. Determination of monthly mean humidity in the atmospheric surface layer over oceans from satellite data. J. Phys. Oceanogr. 1984, 14, 1451–1457. [Google Scholar] [CrossRef]
- Liu, W.T. Statistical relation between monthly precipitable water and surface-level humidity over global oceans. Mon. Weather Rev. 1986, 114, 1591–1602. [Google Scholar] [CrossRef]
- Hsu, S.A.; Blanchard, B.W. The relationship between total precipitable water and surface-level humidity over the sea surface: A further evaluation. J. Geophys. Res. 1989, 94, 14539–14545. [Google Scholar] [CrossRef]
- Schulz, J.; Schluessel, P.; Grassl, H. Water vapour in the atmospheric boundary layer over oceans from SSM/I measurements. Int. J. Remote Sens 1993, 14, 2773–2789. [Google Scholar] [CrossRef]
- Schlüssel, P.; Schanz, L.; Englisch, G. Retrieval of latent heat flux and longwave irradiance at the sea surface from SSM/I and AVHRR measurements. Adv. Space Res. 1995, 16, 107–116. [Google Scholar] [CrossRef]
- Chou, S.-H.; Atlas, R.M.; Shie, C.-L.; Ardizzone, J. Estimates of surface humidity and latent heat fluxes over oceans from SSM/I Data. Mon. Weather Rev. 1995, 123, 2405–2425. [Google Scholar] [CrossRef]
- Jones, C.; Peterson, P.; Gautier, C. A new method for deriving ocean surface specific humidity and air temperature: An artificial neural network approach. J. Appl. Meteorol. 1999, 38, 1229–1245. [Google Scholar] [CrossRef]
- Bentamy, A.; Katsaros, K.B.; Mestas-Nunoz, A.M.; Drennan, W.M.; Forde, E.B.; Roquet, H. Satellite estimates of wind speed and latent heat flux over the global oceans. J. Clim. 2003, 16, 637–656. [Google Scholar] [CrossRef]
- Jackson, D.L.; Wick, G.A.; Bates, J.J. Near-surface retrieval of air temperature and specific humidity using multi-sensor microwave satellite observations. J. Geophys. Res. 2006, 111, D10306. [Google Scholar] [CrossRef]
- Kubota, M.; Hihara, T. Retrieval of surface air specifific humidity over the ocean using AMSR-E measurements. Sensors 2008, 8, 8016–8026. [Google Scholar] [CrossRef]
- Jackson, D.L.; Wick, G.A.; Robertson, F.R. Improved multisensor approach to satellite-retrieved near-surface specific humidity observations. J. Geophys. Res. 2009, 114, D16303. [Google Scholar] [CrossRef]
- Yu, L.; Jin, X. A regime-dependent retrieval algorithm for near-surface air temperature and specific humidity from multi-microwave sensors. Remote Sens. Environ. 2018, 215, 199–216. [Google Scholar] [CrossRef]
- Gao, Q.; Wang, S.; Yang, X. Estimation of surface air specific humidity and air–sea latent heat flux using FY-3C microwave observations. Remote Sens. 2019, 11, 466. [Google Scholar] [CrossRef]
- Wang, D.; Zeng, L.; Li, X.; Shi, P. Validation of satellite-derived daily latent heat flux over the South China Sea, compared with observations and five products. J. Atmos. Ocean. Technol. 2013, 30, 1820–1832. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, R.; Huang, J.; Zeng, L.; Huang, F. Biases of five latent heat flux products and their impacts on mixed-layer temperature estimates in the South China Sea. J. Geophys. Res. Oceans 2017, 122, 5088–5104. [Google Scholar] [CrossRef]
- Roberts, J.B.; Clayson, C.A.; Robertson, F.R.; Jackson, D.L. Predicting near-surface atmospheric variables from Special Sensor Microwave/Imager using neural networks with a first-guess approach. J. Geophys. Res. 2010, 115, D19113. [Google Scholar] [CrossRef]
- Reichstein, M.; Camps-Valls, G.; Stevens, B.; Juang, M.; Denzier, J.; Carvalhais, N. Prabhat Deep learning and process understanding for data-driven earth system science. Nature 2019, 566, 195–204. [Google Scholar] [CrossRef]
- Liu, B.; Li, X.; Zheng, G. Coastal inundation mapping from bitemporal and dual-polarization SAR imagery based on deep convolutional neural networks. J. Geophys. Res. Oceans 2019, 124, 9101–9113. [Google Scholar] [CrossRef]
- Li, X.; Liu, B.; Zheng, G.; Zhang, S.; Liu, Y.; Gao, L.; Liu, Y.; Zhang, B.; Wang, F. Deep-learning-based information mining from ocean remote-sensing imagery. Nat. Sci. Rev. 2020, 7, 1585–1606. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X.; Song, J.; Li, X.; Zhong, G.; Zhang, B. Carbon sinks and variations of pCO2 in the Southern Ocean from 1998 to 2018 based on a deep learning approach. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 3495–3503. [Google Scholar] [CrossRef]
- Zhang, R.; Huang, J.; Wang, X.; Zhang, J.A.; Huang, F. Effects of precipitation on sonic anemometer measurements of turbulent Fluxes in the atmospheric surface layer. J. Ocean Univ. China 2016, 15, 389–398. [Google Scholar] [CrossRef]
- Zhou, F.; Zhang, R.; Shi, R.; Chen, J.; He, Y.; Wang, D.; Xie, Q. Evaluation of OAFlux datasets based on in situ air–sea flux tower observations over the Yongxing Islands in 2016. Atmos. Meas. Tech. 2018, 11, 6091–6106. [Google Scholar] [CrossRef]
- Fairall, C.W.; Bradley, E.F.; Hare, J.E.; Grachev, A.A.; Edson, J.B. Bulk parameterization of air-sea fluxes: Updates and verification for the COARE algorithm. J. Clim. 2003, 16, 571–591. [Google Scholar] [CrossRef]
- Wentz, F.J. SSM/I Version-7 Calibration Report (Report Number 011012); Remote Sensing Systems: Santa Rosa, CA, USA, 2013; 46p. [Google Scholar]
- Zou, C.-Z.; Wang, W. Climate Algorithm Theoretical Basis Document (C-ATBD)—AMSU Radiance Fundamental Climate Data Record Derived From Integrated Microwave Inter-calibration Approach; Technical Report; NOAA: Asheville, NC, USA, 2013. [Google Scholar]
- Zou, C.-Z.; Hao, X. AMSU-A Brightness Temperature FCDR—Climate Algorithm Theoretical Basis Document. NOAA Climate Data Record Program CDRP-ATBD-0345, Rev. 2.0. 2016. Available online: http://www.ncdc.noaa.gov/cdr/operationalcdrs.html (accessed on 30 June 2022).
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, P.; Horanyi, S.; Munoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Quart. J. R. Meteor. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Kanamitsu, M.; Ebisuzaki, W.; Woollen, J.; Yang, S.-K.; Hnilo, J.J.; Fiorino, M.; Potter, G.L. NCEP–DOE AMIP-II reanalysis (R-2). Bull. Am. Meteorol. Soc. 2002, 83, 1631–1644. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning internal representations by error propagation. Read. Cogn. Sci. 1988, 323, 399–421. [Google Scholar] [CrossRef]
- Held, I.M.; Soden, B.J. Robust responses of the hydrological cycle to global warming. J. Clim. 2006, 19, 5686–5699. [Google Scholar] [CrossRef]









| Name | Location | Ocean Depth | Type | Sampling Interval | Period |
|---|---|---|---|---|---|
| Maoming | 111.66°E, 20.75°N | ~100 m | buoy | 1 min | 26 May 2010–28 September 2011 |
| Shantou | 117.34°E, 22.33°N | ~100 m | buoy | 1 min | 16 October 2010–16 May 2011 |
| Bohe | 111.32°E, 21.46°N | ~15 m | offshore platform | 10 min | 26 November 2009–15 May 2010 4 January 2011–28 April 2011 13 March 2012–3 June 2012 |
| Xisha flux tower | 112.33°E, 16.83°N | island | tower | 1~10 min | 26 April 2008–6 October 2008 19 July 2013–31 January 2017 |
| Xisha buoy | 112.33°E, 16.86°N | ~1000 m | buoy | 10 min | 19 September 2009–7 April 2013 14 May 2018–12 June 2018 |
| Kexue 1 | 110.26°E, 6.41°N | ~1300 m | buoy | 15 min | 7 May 1998–20 June 1998 |
| Shiyan 3 | 117.40°E, 20.60°N | ~1000 m | buoy | 15 min | 6 May 1998–23 June 1998 |
| SCS1 | 115.60°E, 8.10°N | ~3000 m | buoy | 15 min | 19 April 1998–29 April 1998 |
| SCS3 | 114.41°E, 12.98°N | ~4500 m | buoy | 15 min | 8 June 1998–16 June 1998 |
| SCS3+ | 114.00°E, 13.00°N | ~4000 m | buoy | 15 min | 13 April 1998–29 May 1998 |
| QF301 | 115.59°E, 22.28°N | ~100 m | buoy | 30 min | 1 March 2011–31 May 2011 |
| QF302 | 114.00°E, 21.50°N | ~100 m | buoy | 30 min | 1 March 2011–31 May 2011 |
| QF303 | 112.83°E, 21.12°N | ~100 m | buoy | 30 min | 1 March 2011–31 May 2011 |
| DH06 | 123.13°E, 30.72°N | <100 m | buoy | 30 min | 29 March 2012–30 December 2013 |
| DH10 | 122.00°E, 31.37°N | <100 m | buoy | 30 min | 1 September 2013–2 December 2015 |
| DH11 | 122.82°E, 31.00°N | <100 m | buoy | 30 min | 1 January 2014–30 December 2016 |
| DH20 | 122.75°E, 29.75°N | <100 m | buoy | 30 min | 6 November 2014–1 November 2016 |
| HH07 | 122.58°E, 37.01°N | <100 m | buoy | 30 min | 29 March 2012–31 December 2013 |
| HH09 | 120.27°E, 35.90°N | <100 m | buoy | 30 min | 1 January 2014–31 December 2016 |
| HH19 | 119.60°E, 35.42°N | <100 m | buoy | 30 min | 6 November 2014–31 December 2016 |
| Reference | Exp1_CUS | Exp2_CU | Exp3_CS | Exp4_US | Exp5_C | Exp6_U | Exp7_S | Exp8_None | |
|---|---|---|---|---|---|---|---|---|---|
| Bias | 0.72 | −0.02 | 0.08 | 0.13 | −0.05 | −0.31 | −0.22 | −0.08 | −0.18 |
| RMSE | 2.56 | 1.64 | 1.81 | 1.62 | 1.64 | 1.81 | 2.28 | 1.83 | 2.36 |
| Absolute error | 3.28 | 1.66 | 1.89 | 1.75 | 1.69 | 2.12 | 2.50 | 1.91 | 2.54 |
| Percent change | - | −49% | −42% | −47% | −48% | −35% | −24% | −42% | −23% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Guo, W.; Wang, X. Deep Learning to Near-Surface Humidity Retrieval from Multi-Sensor Remote Sensing Data over the China Seas. Remote Sens. 2022, 14, 4353. https://doi.org/10.3390/rs14174353
Zhang R, Guo W, Wang X. Deep Learning to Near-Surface Humidity Retrieval from Multi-Sensor Remote Sensing Data over the China Seas. Remote Sensing. 2022; 14(17):4353. https://doi.org/10.3390/rs14174353
Chicago/Turabian StyleZhang, Rongwang, Weihao Guo, and Xin Wang. 2022. "Deep Learning to Near-Surface Humidity Retrieval from Multi-Sensor Remote Sensing Data over the China Seas" Remote Sensing 14, no. 17: 4353. https://doi.org/10.3390/rs14174353
APA StyleZhang, R., Guo, W., & Wang, X. (2022). Deep Learning to Near-Surface Humidity Retrieval from Multi-Sensor Remote Sensing Data over the China Seas. Remote Sensing, 14(17), 4353. https://doi.org/10.3390/rs14174353