1. Introduction
Light detection and ranging (LiDAR) is the most favorable technology for the characterization of vertical forest structures [
1,
2]. LiDAR measures the vertical structure of objects by emitting laser pulses and measuring the difference in time between the transmitted emission and its echoed return. Over vegetated areas, LiDAR systems, given their short wavelengths (i.e., between 532 and 1550 nm) can reflect off of individual elements (e.g., the tops of canopies) or penetrate through the small gaps to reflect off of the ground. Therefore, coupled with their very narrow beams, LiDAR systems can directly measure surface and vegetation heights with high resolution and precision [
2]. In contrast, optical systems, given their passive nature, only measure the reflectance from the tops of canopies; as such, they cannot provide direct measurements of vertical forest structures. Radars, on the other hand, are active systems that use electromagnetic waves that are longer (between 0.8 and 100 cm) than those used by LiDARs. As such, given the longer wavelengths used, radar waves do not scatter from individual elements of canopies, and most of the operating radar systems do not reach the ground as they are scattered due to interactions with leaves and branches [
2,
3].
For the characterization of forest structures over large areas, two types of LiDAR systems are used: airborne and spaceborne systems. Airborne systems have much higher resolutions (i.e., a large number of returned points per m
2); however, they are costly, and due to these costs, their use is generally limited to small areas [
4]. Spaceborne LiDARs are freely accessible to the public and have global coverage, but they are generally scarcely distributed over Earth’s surface (e.g., the latest spaceborne LiDAR system is expected to only cover 4% of Earth’s surface [
5]). Moreover, given the differences in the operational altitudes of airborne and spaceborne LiDARs, spaceborne systems are more likely to be affected by the presence of clouds, which either reflect the LiDAR signal entirely or cause path delays, thus introducing uncertainties [
6,
7]. In addition, due to their higher altitudes, spaceborne LiDARs require higher energy levels per shot for sufficient signal to be returned from the ground [
2], which is not currently feasible due to power constraints.
Currently, there are two operational spaceborne LiDARs. The Advanced Topographic Laser Altimeter System (ATLAS) on board the Ice, Cloud and Land Elevation Satellite (ICESat-2), and the Global Ecosystem Dynamics Investigation (GEDI) on board the International Space Station (ISS). ATLAS/ICESat-2 is equipped with a single 532 nm wavelength laser that emits 6 beams (arranged into 3 pairs). Beam pairs are separated by ~3 km across-track, with a pair-spacing of 90 m. The nominal footprint of ATLAS is 17 m, with an along-track spacing interval of 0.7 m. Moreover, ATLAS uses a photon counting system and can detect single echoed photons. GEDI, on the other hand, is a full-waveform LiDAR, and it is the first system specifically optimized to estimate vegetation structures [
5]. GEDI has been acquiring waveforms of Earth’s surface since April 2019 and will continue operation until January 2023. GEDI is comprised of 3 identical, 1064 nm lasers designed to sample the earth’s surface at a ~60 m intervals along the track with a cross-track separation of ~600 m. One laser’s power is split into two beams (called “coverage lasers”), while the remaining two lasers operate at full power. These 4 beams (2 coverage beams and 2 full-power beams) are slightly dithered by beam dithering units (BDU) that rapidly deflect light by 1.5 m rads (~600 m) to produce 8 tracks of data. The GEDI lasers operate with a pulse repetition frequency (PRF) of 242 Hz, and as such, given its 7.3 W output power [
8], the coverage lasers fire 5 mJ pulses, while each of the 2 full-power lasers fires 10 mJ pulses. On the ground, GEDI measures 3D structures over a 25 m wide footprint in the form of waveforms that consist of a series of multiple, connected, temporal modes, or peaks, representing the different reflections from an object (e.g., the top of the canopy cover) or different objects close together (e.g., the understory and the ground). The received waveforms are then digitized to a maximum of 1246 bins, with a vertical resolution of 1 ns (15 cm), corresponding to a maximum height range of 186.9 m, with a vertical accuracy of ~3 cm over relatively flat, non-vegetated surfaces [
5].
Given the mission objectives of GEDI, as well as the lasers’ configurations, the objective of this paper is therefore to assess the capabilities of the two laser types (i.e., coverage and full-power) in penetrating through the canopies and detecting the ground, as well as their capabilities in accurately detecting the tops of canopies. The accuracy in the detection of both surfaces (i.e., ground return and canopy tops) will indicate the accuracies that could be obtained with GEDI data in deriving vertical forest structures, especially over very dense tropical forests. As such, the assessment of GEDI’s performance will be based on the difference between the elevation of the estimated canopy top or ground return and the elevations reported by the 30 m Shuttle Radar Topography Mission (SRTM) digital elevation model (DEM). It should be noted, however, that SRTM DEM data corresponds to the elevations of the scattering center within the canopy [
9]. Nonetheless, for similar canopy height ranges over similar tree structures, SRTM elevations should be within the same magnitude. The performance analysis of GEDI will be based on the capabilities of each type of laser (i.e., coverage lasers and full-power lasers) to penetrate the canopy and detect the ground. Next, the effects of beam sensitivity on the ground and canopy-top detection will be analyzed. Beam sensitivity represents the maximum canopy cover through which the GEDI LiDAR can detect the ground with 90% probability [
2]. Finally, the effects of acquisition time on each type of laser will be assessed.
Our decision to choose a tropical forest is due to the generally dense canopy cover and tall trees, which might be limiting factors for GEDI’s lasers. In addition, the influences of beam sensitivities (the probability of a given shot over a given canopy cover reaching the ground [
2]) and acquisition times on the penetration of the lasers through the canopies, or their influence on accurately detecting the tops of the canopies, will also be assessed.
The paper is organized into four sections. A description of materials and methods is given in
Section 2. The results are given in
Section 3, followed by the discussion and conclusions in
Section 4 and
Section 5.
4. Discussion
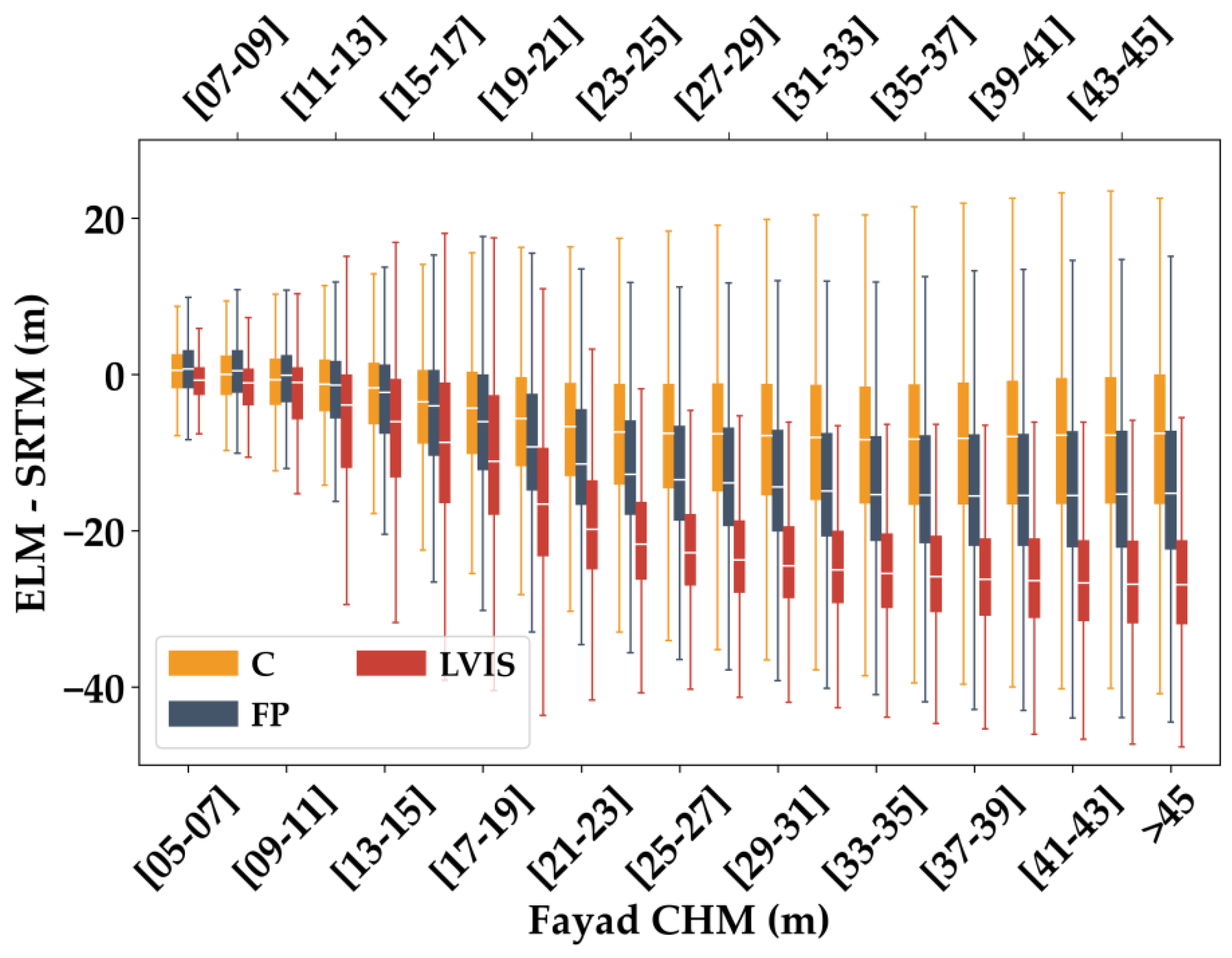
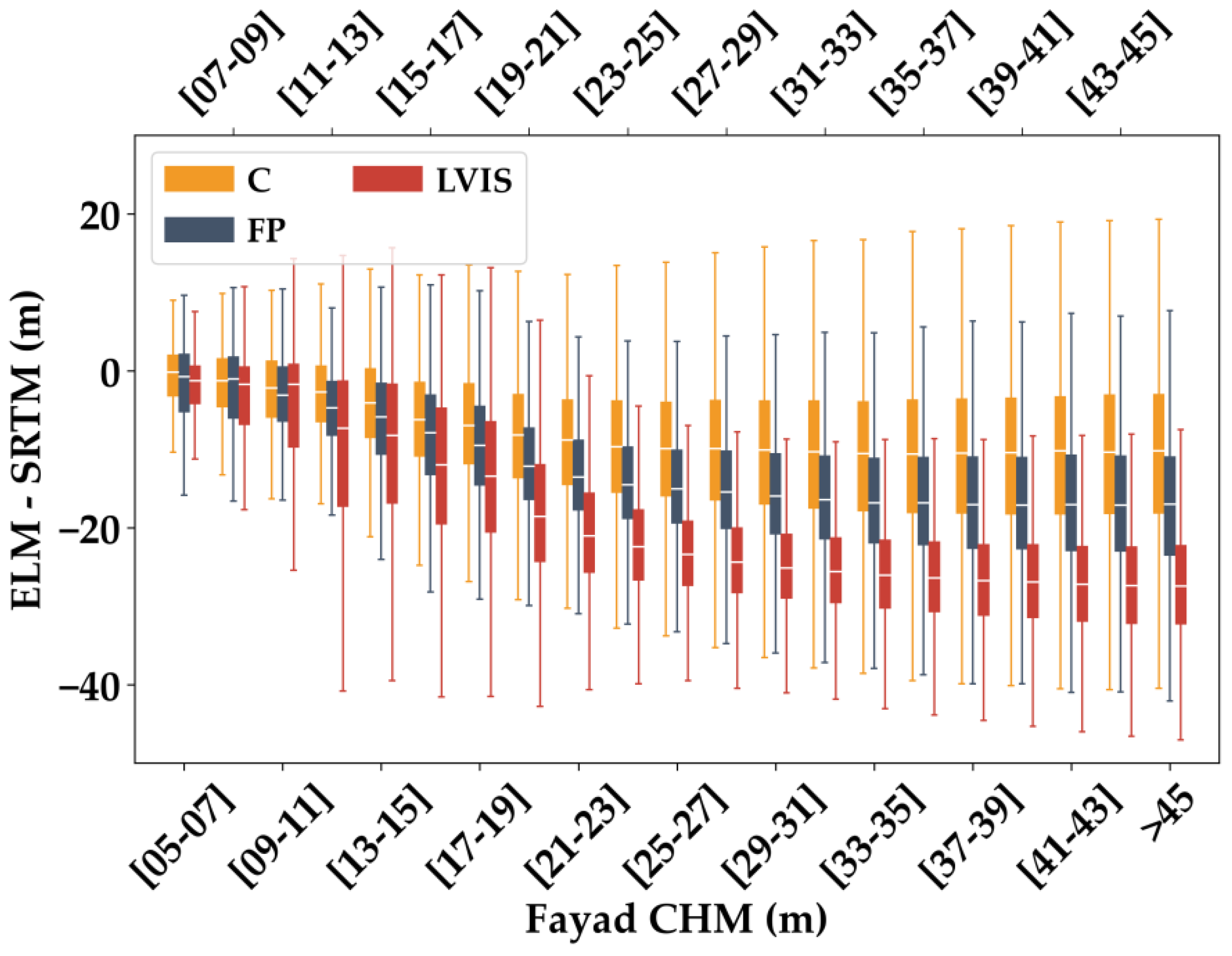
The analysis of the difference between the elevation of the lowest mode (ELM) and SRTM elevations for GEDI’s coverage and power lasers, as well as LVIS, show that both the types of GEDI’s lasers and LVIS are limited in their capability in reaching the ground in a tropical context with high canopy-cover and tall trees. Moreover, with a 5 mJ energy output per shot and ~400 km altitude, the coverage lasers are only able to reach approximately one-third of the distance into the canopy in comparison to LVIS, which is closer to Earth’s surface and using a laser with the same energy output, and this was true for all canopy height ranges. Indeed, the median difference between ELM and SRTM for GEDI’s coverage lasers was −7.9 m for trees taller than 25 m, while for LVIS, the median difference between ELM and SRTM was −24.7 m on average. In the case of the full-power lasers, which have an energy of 10 mJ per shot, the penetration into the canopy was higher than the coverage lasers (median difference of −14.8 m for trees taller than 25 m); however, it was still lower than the penetration of LVIS (−24.7 m on average). Moreover, for both GEDI’s coverage and full-power lasers, the penetration could only reach a certain depth into the canopy. For the coverage lasers, the maximum depth was reached for canopy heights of 25 m and higher, while in the case of the full-power lasers, the maximum depth was reached for canopy heights of 35 m and higher. Indeed, in the case of the coverage lasers, the median difference between ELM and SRTM for shots with Fayad CHM > 25 m is −7.9 ± 0.3 m and 85% of shots presented a difference between ELM and SRTM lower than −18.4 ± 0.3 m. In the case of the full-power lasers, the median difference between ELM–SRTM for shots with Fayad CHM > 35 m is −15.4 ± 0.12 m, and 85% of shots showed a difference between ELM and SRTM that was lower than −23.7 ± 0.41 m. Moreover, while in this study we could not directly compare GEDI footprints with corresponding airborne laser scanning data (ALS), if we compare GEDI’s lasers performance with those from LVIS for similar canopy height ranges, we can note that both GEDI’s lasers are underperforming over highly, densely vegetated forests in comparison to LVIS. This finding is in contrast to previous studies that assessed the penetrative capabilities of spaceborne full-waveform LiDAR systems. For example, the study by Chen [
18], conducted over a study area in South Carolina using ICESat data, found a mean difference of −0.97 m. Next, the studies by Hilbert and Schmullius [
19] and the study by Adam et al. [
4], using, respectively, ICESat and GEDI data, over a study area in the Thuringian forest, found a difference between LiDAR-waveform-derived ground return and ALS data of, respectively, a 0.19 m (mean difference) and a 0.18 m (median difference). Finally, while not analyzed in this article, acquisition dates could also effect the penetrative capabilities of GEDI. In this study, some GEDI acquisitions had higher penetration than others. Some studies reported that rainfall could have an effect on penetration [
20]. However, this was not the case over our study area, and since the effects of the acquisition dates were similar for both the coverage and full-power lasers, the most probable explanation would be the loss of leaves during certain seasons, allowing the lasers to better penetrate into canopies.
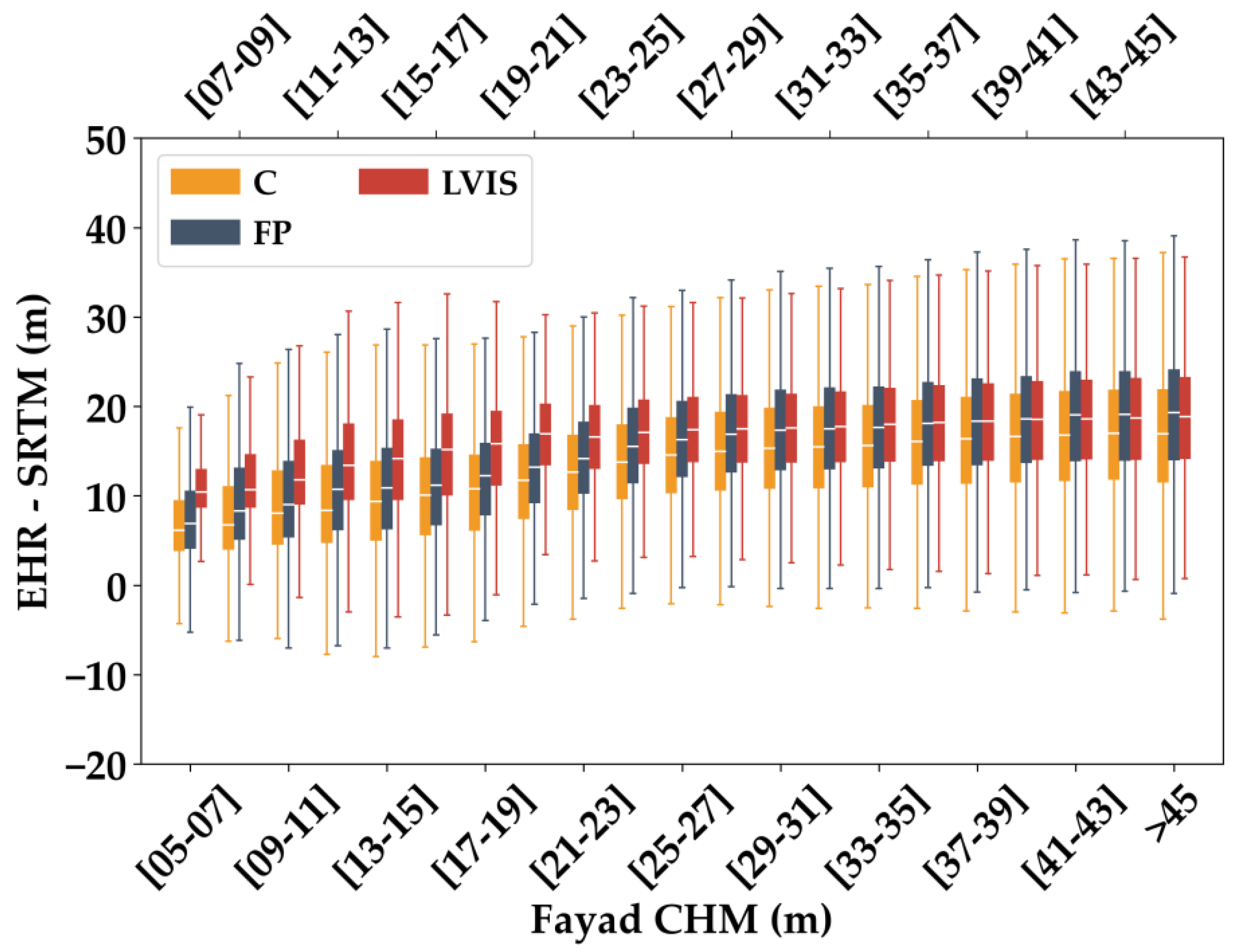
Regarding the detection of the tops of canopies, both of GEDI’s lasers also show some limitations in the detection of canopy tops in comparison to LVIS. However, given the full-power lasers’ higher energy-per-shot in comparison to the coverage lasers, GEDI’s full-power lasers were better able to detect canopy tops. Moreover, the median difference between EHR–SRTM for GEDI’s full-power lasers and LVIS are in accordance with the literature. In fact, for Fayad CHM between 25 and 35 m, the median difference of EHR–SRTM was around 1 m, after which the difference between EHR–SRTM from GEDI’s full-power lasers and LVIS decreased to around 0.3 m. These findings were found to be similar to those of comparable studies (e.g., [
4,
19,
21,
22]). Nonetheless, while some studies reported negative differences between full-waveform-derived canopy tops and canopy tops derived from ALS data (i.e., waveform-derived canopy tops are lower than ALS-based ones) (e.g., [
21,
22]) while the others reported positive differences (e.g., [
4,
19]), the findings in this study (EHR from GEDI is lower in general than EHR from LVIS) are logical, given the fact that both GEDI and LVIS are full-waveform lasers with similar specifications. Moreover, the detection of the canopy tops using either GEDI’s coverage lasers or the full-power lasers is linked to the canopy cover. Indeed, while the difference between the elevation of the highest return (EHR) and SRTM was lower for both GEDI’s coverage and full-power lasers than the differences reported using LVIS for all canopy height ranges from Fayad CHM, this difference decreased with an increase in canopy heights. This is because, on average, taller trees have higher canopy cover, therefore increasing the canopy surface over which the lasers can reflect off.
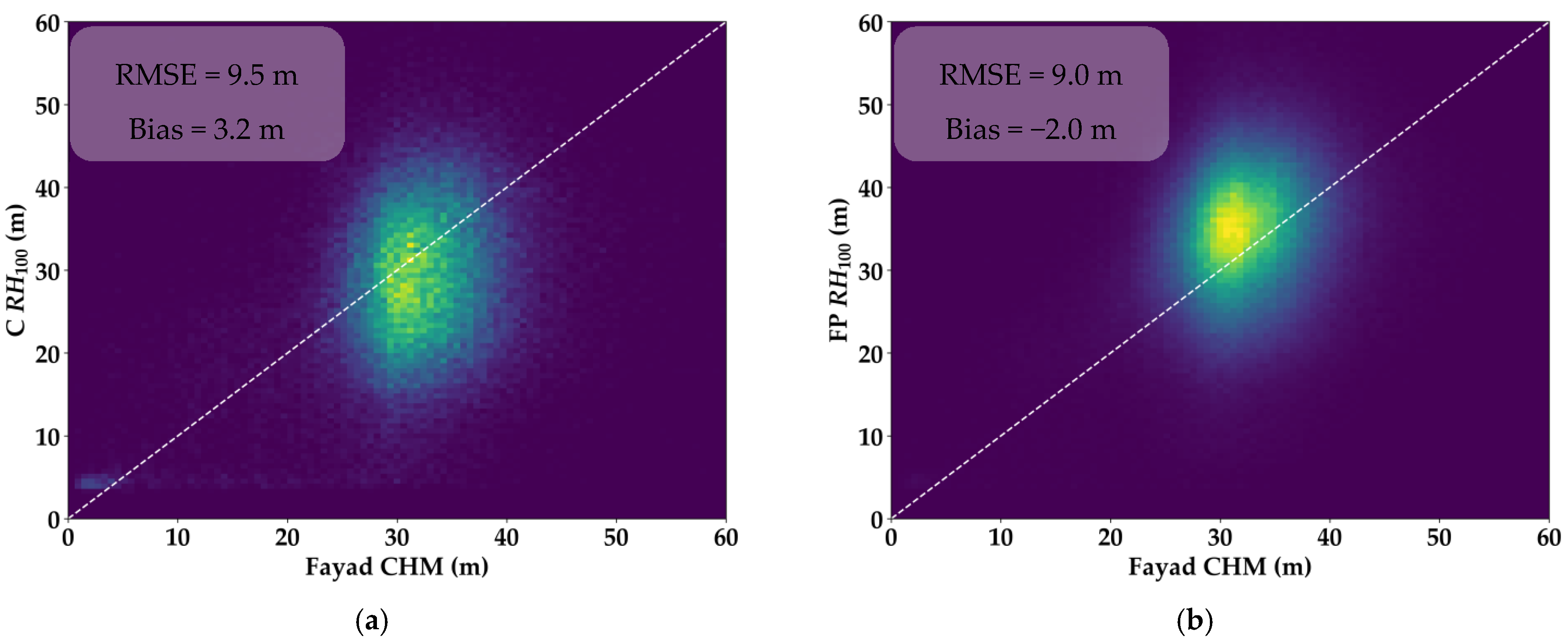
The detection of both the canopy tops and ground return is affected by two variables, the energy of the reflected pulse as well as the chosen thresholds used to detect the canopy-top and ground returns from each waveform. Therefore, by selecting the footprints with sensitivities higher than 98%, which in essence means that ground return is detected for canopy cover up to 98% [
2], both the penetration and detection of canopy tops seem to improve for these selected shots. Indeed, for shots with beam sensitivities ≥ 98%, the estimated
RH100, which is the difference between the elevation of the ground return and the elevation of the canopy top, is increased, on average, by 5 m for both the coverage lasers and the full-power lasers. Nonetheless, in the case of the coverage laser, the average of estimated
RH100 values (
= 28.8 m) was still lower than the
RH100 estimates from both the full-power lasers (
= 34.1 m) and LVIS (
= 35.9 m). Moreover, by selecting only the shots with the best probabilities of reaching the ground (i.e., shots with beam sensitivities ≥ 98%), more than 64% of coverage laser shots were removed, as were close to 41% of the full-power laser shots. Finally, even by selecting the GEDI and LVIS shots with sensitivity ≥ 98%, respectively, 62.7%, 38.8%, and 29.7% of shots from GEDI’s coverage laser, GEDI’s full-power lasers, and LVIS have
RH100 estimates that are lower than the values from the corresponding Fayad CHM estimates (by −8.63 ± 6.2 m, −6.6 ± 5.6, and −6.8 ± 6.2 m, on average, for, respectively, the coverage, full-power, and LVIS). For these shots (GEDI and LVIS shots with lower
RH100 estimates than Fayad CHM), this is a clear indicator of underestimation [
23], given the fact that
RH100 is a measure of the maximum canopy height, while Fayad CHM is the average of maximum canopy heights over a 250 m
2 area. These findings are different from the literature that stipulates that a beam sensitivity of 98% should be enough to detect the ground with a tree cover of 98% or less. However, over our study area, the mean tree cover reported from the L2B dataset was around 85%. Therefore, in a forest with very tall trees and dense vegetation, the detection of the ground return could be problematic, even with acquired shots with very high sensitivities.
Regarding the effects of the selected algorithm (a1 to a6) on the detection of canopy tops and ground return, in this study, the elevation of these two variables (ground and tops of canopies) was estimated based on the suggested algorithm to use from the ‘selected_algorithm’ variable in the L2A data product. The ‘selected_algorithm’ provides the algorithm detected as producing the lowest non-noisy ground return. Nonetheless, over our study area, the ‘selected_algorithm’ suggested only either a1 (back threshold of 6 ns) or a2 (back threshold of 3 ns). Choosing the appropriate back threshold is primordial for the detection of the ground return, especially over densely vegetated areas where the reflection off of the ground is very weak. As such, by choosing a high back threshold value, the weak ground return will not be detected, and canopy heights will thus be underestimated. Over French Guiana, both a1 and a2 seem to be inadequate for the processing of the waveforms, especially those acquired by the coverage lasers. Therefore, to potentially detect very weak ground returns, a possible solution would be to choose a back threshold with a lower value than those of algorithms a1 or a2. Nonetheless, the choice of a lower-valued back threshold could have the adverse effect of incorrectly detecting high noise as the ground return [
4], which might lead to over-estimating canopy heights. Obtaining the correct values of thresholds is still an issue with full-waveform-based LiDAR sensors as they could be different from one area to another, and the reliance on the best settings group from the ‘selected_algorithm’ is not enough.
The effects of acquisition time on the detection of the ground return indicate that the coverage lasers are affected by solar noise, given that acquisitions made between 8 a.m. and 4 p.m. have the lowest elevation differences between ELM and SRTM (i.e., less penetration) than acquisitions made at other times of the day. This effect was not present for the full-power lasers, which showed, on average, similar penetration values for all acquisitions. The results concerning the effects of solar noise on the detection of the ground return are consistent with the findings of Adam et al. [
4]. However, in their study, they reported that beam type has no influence on DTM accuracy for forests with low-density cover, which is not the case for forests with high-density cover, such as the forest from this study area where the full-power lasers perform better.
The effects of solar noise on the detection of canopy tops seem to slightly affect the coverage lasers as the coverage lasers reported slightly lower elevation differences between EHR and SRTM for acquisitions made between 8 a.m. and 12 p.m. in comparison to acquisitions made during other hours. These findings are different from what was obtained in the study by Adam et al. [
4], where they found that the effects of solar noise on the accuracy of canopy tops and ground return detection were similar. The discrepancies between their study and ours could be explained by the differences in tree densities between the two study sites. Indeed, our study site is characterized by a high-density cover throughout, indicating that both the coverage and full-power lasers have enough surface area from canopy tops to reflect, thus minimizing the effects of solar noise.
5. Conclusions
The results presented in this study show that, even after the application of different filters to remove unusable GEDI acquisitions, the remaining shots acquired by the coverage and full-power lasers were limited in their capabilities to reach the ground over tropical forests. This result is quite different from comparable studies that analyzed the accuracy of GEDI over temperate forests, for example. Indeed, previous studies saw a sub-meter DTM difference between GEDI and reference ALS data, while in this study, a difference of several meters was observed between the difference of the ground elevation from GEDI’s lasers and SRTM and the difference between the ground elevation from LVIS and SRTM. Moreover, the analysis showed that the coverage lasers could potentially only be used to estimate canopy heights in the 20–30 m range.
The analysis of beam sensitivity showed results that are similar to comparable studies. In essence, GEDI-acquired shots with higher sensitivity have a higher probability of reaching the ground than shots with lower sensitivity. Nonetheless, our findings indicate that, in a tropical context, GEDI’s lasers could still not reach the ground for certain shots, even with beam sensitivities higher than 98% and a significantly lower canopy cover percentage.
Regarding the detection of canopy tops, both GEDI lasers showed a lower median difference between detected top-of-canopy and SRTM DEM elevations in comparison to LVIS, especially for trees with heights lower than 25 m. Moreover, similar to previous findings, the coverage lasers showed fewer capabilities than the full-power lasers.
One possible improvement on the accuracy of the detected ground return and canopy tops would be choosing lower forward and backward thresholds in the algorithm settings groups than the ones suggested by the ‘selected_alrogithm’ in the L2A dataset. However, selecting a very low threshold, especially for ground detection, could also introduce uncertainties as the algorithm could incorrectly detect noise as the ground return.
Finally, acquisition time also showed some effects on the detection of ground return and canopy tops for GEDI’s coverage lasers. Indeed, shots acquired in the early morning or the late afternoon showed slightly better capabilities at detecting both surfaces. This result is similar to that of comparable studies.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}