1. Introduction
The Indian Regional Navigation Satellite System (IRNSS) is developed by the Indian Space Research Organisation and officially named Navigation with Indian Constellation (NavIC). IRNSS broadcasts satellite signals through the L5 (1176.45 MHz) and S (2492.028 MHz) carriers. Currently, IRNSS has eight satellites that entered the orbit, including three geostationary earth orbit (GEO) satellites (I03, I06, and I07) and five inclined geosynchronous orbit (IGSO) satellites (I01, I02, I04, I05, and I09) [
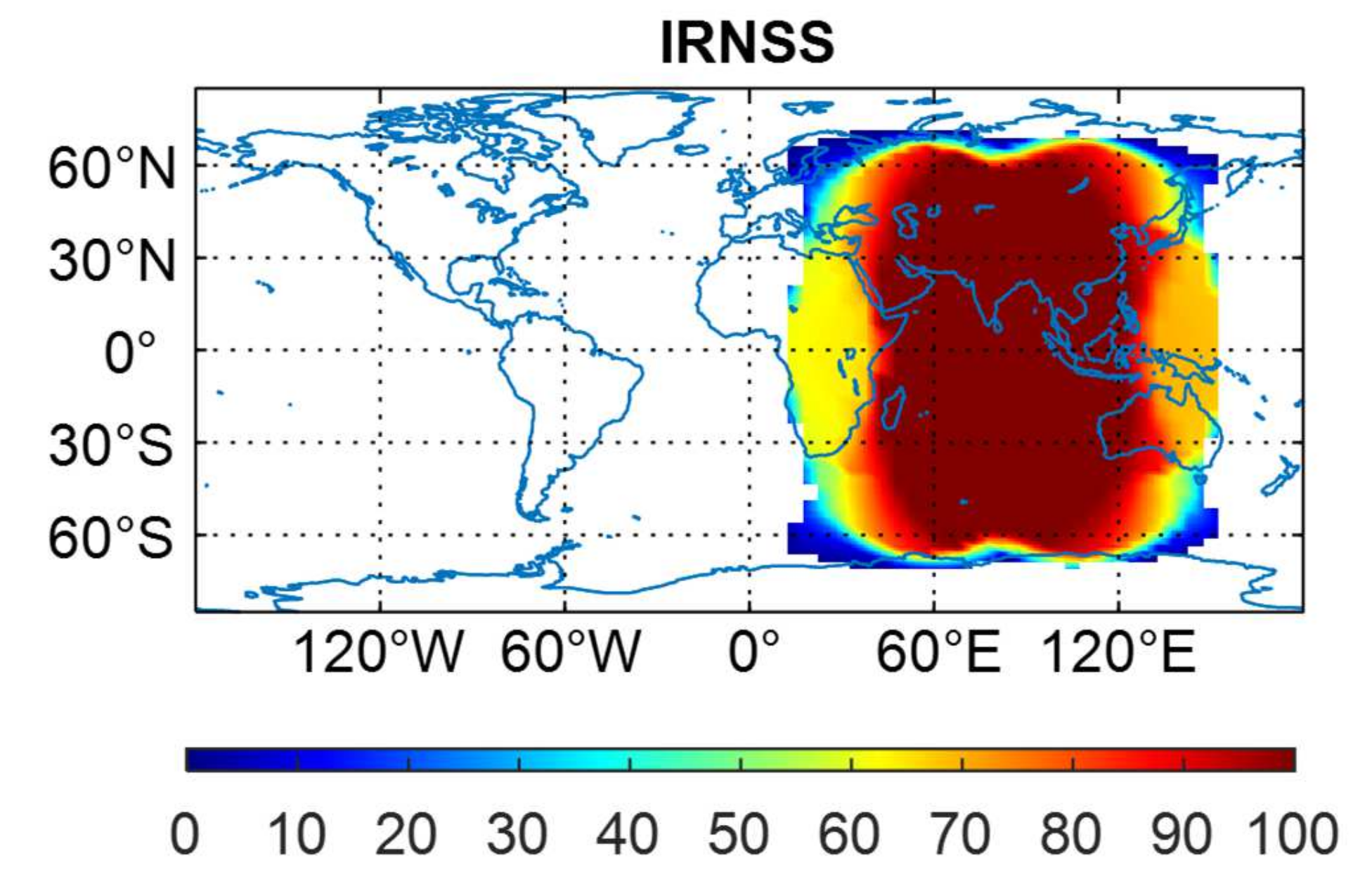
1]. IRNSS is committed to providing an independent positioning service over India and its surrounding areas. The Indian continent and the area within 1500 km from its boundary are the primary service areas, and the areas between 30° S and 50° N and between 30° E and 130° E are the secondary service areas.
Several researchers have conducted the assessment of IRNSS signal quality. Mukesh et al. [
2] systematically assessed the carrier-to-noise density ratio (C/N0) of IRNSS, and reported that the C/N0 of seven satellites (I01–I07) varied in the range of 30–45, 44–54, 50–55, 41–53, 45–53, 44–51, and 42–50 dB-Hz, respectively. Zaminpardaz et al. [
3,
4] compared the noise characteristics of GPS/IRNSS L5 signals and found that the C/N0 values, code precision and phase precision of GPS L5 signals are significantly better than that of IRNSS L5. In addition, IRNSS L5 signals could present larger impacts from multipath errors compared to the GPS L5. The orbit determination method of IRNSS was investigated in Babu et al. [
5], and they solved the parameters of satellite state vectors and satellite clocks using batch least squares (BLS) and extended Kalman filter (EKF). The results of orbit determination with BLS were poor during clock jump events, and the errors of orbit determination with EFK would accumulate, resulting in poor results when conducting a long period of data processing. Based on these results, they presented a combination strategy with the use of BLS and EKF, which could limit the user equivalent range error (UERE) within an acceptable level.
IRNSS provides a standard positioning service (SPS) for civil users and a restricted service (RS) for authorized users in the service areas, using differently modulated L5 and S signals, with a binary phase-shift keying (BPSK) modulation for SPS users, and with a binary offset carrier (BOC) modulation for RS users [
6]. Several studies have analyzed the positioning accuracy of IRNSS. Zaminpardaz et al. [
7] analyzed the dilution of precision (DOP) and single point positioning (SPP) solutions in the service areas of IRNSS. The analysis used approximate height to develop a height-constrained model when the geodetic height of the receiver does not change significantly. The results showed that the accuracy improvements coming with the height constraints could increase with the increment of distance from the equator, and those in the north and east directions could reach up to 28.1% and 36.2%, respectively. Regarding the DOP over the primary service areas, the position DOP (PDOP) values were smaller than four, and the horizontal DOP (HDOP) values were less than two. Dan et al. [
8] carefully analyzed the availability of IRNSS under open and occluded environments by using simulation methods, and it was demonstrated that users could observe 6–7 IRNSS satellites in primary service areas and over four satellites in secondary service areas. The accuracy assessment of SPP with IRNSS L5, S, and L5/S signals indicated that the horizontal offset between the reference point and the average value of the epoch-wise position solutions for the three cases was 1.571, 0.398, and 0.372 m, respectively, while the corresponding three-dimensional (3D) offset was 1.706, 1.526, and 1.461 m, respectively. With the continuous improvement of the IRNSS constellation, several researchers have begun to consider the interoperability of IRNSS with other satellite systems. Rao et al. [
9] analyzed the positioning performance of seven-satellite IRNSS and the combination of IRNSS with GPS and GLONASS by using simulation methods. Based on the simulated PDOP values and UERE values (approximately 6 m), it was deduced that the position accuracy achievable with IRNSS satellites was at the level of 20 m over the Indian subcontinent, while the corresponding position accuracy was improved to 6–8 m under the combination of GPS/GLONASS/IRNSS. ISRO [
10] analyzed the accuracy of dual-frequency SPP, and the performance of DOPs and available satellites by dividing the IRNSS service areas into five regions (eastern, northern, western, southern, and central). Wang et al. [
11] solved the short baseline based on the combination of IRNSS and QZSS. The results showed that the ambiguity success rate (ASR) for a single system (i.e., IRNSS or QZSS) was both under 10%, but the ASR could reach up to approximately 100% after using the combination of IRNSS and QZSS. Additionally, the IRNSS/QZSS integrated case could achieve smaller PDOP values, and the positioning accuracy was at a millimeter level in the east, north, and up directions when the phase ambiguities were successfully fixed. The combination of GPS/Galileo/QZSS/IRNSS could significantly improve the ASR and positioning performance under high cut-off elevations when using the L5 signal [
12]. The ASR of the four-system combination was higher than 95% even when the elevation mask was set to 40°, with the millimeter-level and decimeter-level positioning accuracy under ambiguity-fixed solutions and ambiguity-float solutions, respectively. Nadarajah et al. [
13] combined the systems of IRNSS, GPS, Galileo, and QZSS to evaluate the relative positioning accuracy with the single-frequency observations from L1/E1 or L5/E5a signals. The single-frequency ASR of L1/E1 and L5/E5a signals were 74% and 96%, respectively. The positioning accuracy with L5/E5a signal was slightly better than that with L1/E1 signal under the ambiguity-fixed solutions, and the advantage of L5/E5a signal was conspicuous under the ambiguity-float solutions. The results demonstrated that the L5/E5a signal had a better positioning performance than the L1/E1 signal for all the satellite systems. Odijk et al. [
14] observed ASR improvements of 26.2%, and 57.7%, respectively, in classical differencing and inter-system differencing when only 3–4 IRNSS satellites were added to GPS/Galileo/QZSS for L5/E5a short-baseline positioning.
Although many previous studies evaluated the positioning accuracy with IRNSS, the IRNSS performance at the user end needs to be further investigated. For single-frequency SPP performance analysis, only one or two stations were employed in [
7,
8], and the theoretical analysis with PDOP and UERE rather than the real data processing with ground tracking stations was conducted in [
9]. In addition, the accuracy of dual-frequency SPP was investigated in [
10], but the SPP users usually employ the single-frequency observations. With the increasing number of Multi-GNSS Experiment (MGEX) stations that can receive the signals of IRNSS, the earlier SPP results may no longer be applicable. As to the real-time kinematic (RTK) positioning performance analysis, the existing research [
11,
12,
13,
14] paid more attention to the fusion data processing of IRNSS with other satellite systems, and only limited IRNSS-only solutions with low ASR were reported in [
11,
12]. Thus, more tests should be carried out to gain more insight into IRNSS-only RTK performance.
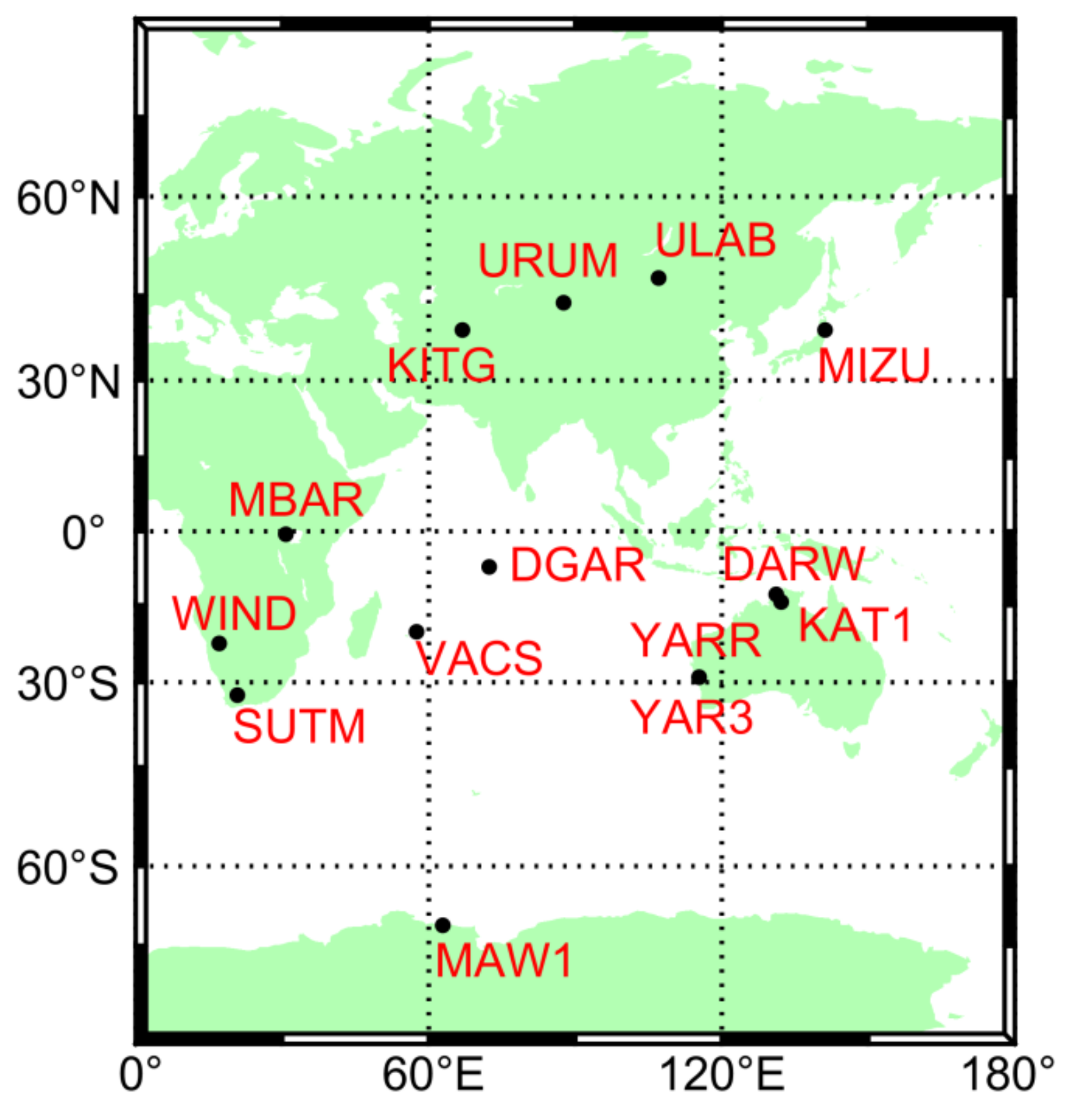
The IRNSS constellation has eight in-orbit satellites at present, and can offer users preliminary positioning, navigation, and timing services over the service regions. This contribution analyzes the current performance of IRNSS-only single-frequency SPP and short-baseline RTK positioning based on the datasets from 14 MGEX stations located in the IRNSS service areas on seven consecutive days. For completeness, the availability of IRNSS constellation (including the visible satellite number, service rate, and PDOP value) is also studied. For comparative analysis, the results of GPS single-system and GPS/IRNSS dual-system combination cases are also provided. In addition, the inter-system bias (ISB) between IRNSS and GPS in the dual-system combined SPP, which was rarely covered by the existing studies, is rigorously analyzed. The paper starts with a description of the constellation and signal of IRNSS. Next, the mathematical model of SPP and RTK is presented. Subsequently, the employed datasets are detailed. Then, the derived results are analyzed and discussed. Finally, the main conclusions are summarized.
3. Methods
In this section, the mathematical model for the GPS/IRNSS integrated position determination is developed, while the corresponding model for the IRNSS-only and GPS-only data processing can be easily derived with the developed mathematical model. The positioning model can be divided into absolute and relative positioning based on different data processing strategies. The absolute positioning includes the SPP and the precise point positioning (PPP). This contribution only analyzes the positioning results of SPP and short-baseline RTK, and does not cover the PPP due to the absence of IRNSS precise ephemeris. Only the pseudorange measurements on the L5 band are used for SPP processing as the receivers at MGEX stations that support IRNSS satellites only receive the L5 signal [
15]. The code observations from the IRNSS and GPS satellites can be expressed as follows:
where
G and
I denote satellites of GPS and IRNSS, respectively,
is the measured pseudorange,
is the geometric distance, where
denotes the satellite coordinates in three dimensions, which can be calculated by the broadcast ephemeris, and
denotes the receiver coordinates in three dimensions,
denotes the receiver clock offset (in meters) that absorbs the receiver code hardware delay,
denotes the satellite clock offset (in meters) after applying the time group delay (TGD) corrections,
denotes the ionospheric delay,
denotes the tropospheric delay, and
denotes the code measurement noises including the multipath errors. The ionospheric delay and tropospheric delay are corrected using the GPS Klobuchar model [
16] (can also use the Galileo Nequik-G [
17] or the BDS-3 BDGIM [
18]) and the Saastamoinen model in this paper, respectively.
When using different observations to estimate the satellite clock offset, the obtained satellite clock estimates are not consistent with each other as the frequency-related satellite code hardware delay is absorbed. Therefore, a bias correction is necessary when the code observations used for SPP processing are different from those adopted by satellite clock estimation. The TGD parameter provided in the broadcast ephemeris (generated with dual-frequency observations) can be employed to derive the consistent satellite clock offset for the single-frequency SPP users. The satellite clock offset with TGD corrections can be formulated as follows:
with
and
where
denotes the satellite clock offset calculated by the broadcast ephemeris,
,
and
denote the carrier frequency on the L1, L5 and S bands, respectively, and
denotes the correction of the TGD.
The IRNSS System Time (IRNSST) started at 00:00:00 on 22 August 1999, which corresponds to the Coordinated Universal Time (UTC) 23:59:47 on 21 August 1999 (same time as the first GPS week with a roll-over). IRNSST is a continuous time without leap seconds, and it is determined by the IRNSS System Precise Timing Facility (IRNPT) with an ensemble of Caesium and Hydrogen maser standard atomic clocks, which is steered to UTC. The time offset between IRNSST and GPS time could be several nanoseconds [
19], and thus cannot be ignored in the IRNSS/GPS integrated data processing. IRNSS takes WGS-84 coordinate system as its space reference. Therefore, the transformation of satellite coordinates is unnecessary in the integrated data processing with IRNSS and GPS. Although the center frequency of L5 band is identical for IRNSS and GPS, there may still be difference in the receiver code hardware delay between the two satellite systems. This contribution uses GPS as the reference system, and introduces the ISB parameter into the code observation equation of IRNSS to account for the distinct time scale and hardware delay [
20].
The linearized observation model for the GPS/IRNSS combined SPP can be expressed as follows:
where
denotes the vector of observed-minus-computed (OMC) code observables,
denotes the observation residual error vector,
denotes the design matrix, and
denotes the unknown parameter residual error vector between the true value and the approximate value.
and
can be formulated as follows:
where
denotes the OMC code observables,
denotes the approximate 3D coordinates of the receiver,
is the geometric distance between the receiver approximate position and the satellite position,
n and
m are the satellite numbers of GPS and IRNSS, respectively,
denotes the receiver coordinate residual errors (i.e., corrections) with respect to the approximate position,
denotes the residual error of the GPS receiver clock offset, and
is the residual error of the ISB parameter
(with
). The least squares adjustment is used for the parameter estimation in SPP processing.
In addition to the code observations, the RTK positioning includes the carrier phase observations, which can be expressed as follows:
where
is the phase observation in meters,
is the wavelength,
is the integer phase ambiguity in cycles,
is the phase measurement noises including multipath errors,
is the grouped receiver phase and code hardware delay, and
is the grouped satellite phase and code hardware delay.
Regarding the relative positioning, the difference between different observations can form a combined observable, so as to weaken the influence of various errors and biases. The single-difference between stations can eliminate the satellite clock errors and satellite hardware delay, and weaken the ionospheric delay, tropospheric delay, and satellite orbit errors. The inter-satellite single-difference can remove the receiver clock errors and receiver hardware delay. The double-difference carrier phase measurements can be expressed as follows:
where
denotes the double-difference operation,
and
denote two satellites from GPS or IRNSS, and
and
denote two stations. The effects of residual errors of ionospheric delay and tropospheric delay can be ignored during the processing of short-baseline RTK, and the double-difference carrier phase observation equation can be simplified as follows:
The linearized observation model of the GPS/IRNSS combined short-baseline RTK can be described as follows:
where
is the vector of dual-difference OMC code and carrier phase observables,
denotes the observation residual error vector in the short-baseline RTK positioning,
denotes the design matrix in the short-baseline RTK positioning,
is the vector of estimates in the short-baseline RTK positioning,
is the double-difference OMC code observables,
is the double-difference OMC carrier phase observables,
n and
m denote the satellite number of GPS and IRNSS, respectively,
and
denote the reference satellite of GPS and IRNSS, respectively,
and
denote a satellite of GPS and IRNSS, respectively, and
,
and
denote the linearization coefficients related to receiver coordinates in the design matrix
. The meanings of other parameters are the same as the aforementioned ones, and thus we do not repeat them again. According to Equation (14), the parameters to be estimated in the short-baseline RTK positioning comprise the 3D receiver coordinates and the double-difference phase ambiguities of GPS and IRNSS. The Kalman filter is used for the parameter estimation in the short-baseline RTK processing. The receiver coordinates are estimated as white noise process, and the double-difference phase ambiguity parameters are estimated as integer constants. The least-squares ambiguity de-correlation adjustment (LAMBDA) method [
21] is used for the ambiguity resolution (AR).
In addition to the rigorous functional model, a suitable stochastic model can also improve the positioning performance. Usually, the observations can be influenced by the ionosphere, troposphere, and multipath effect during the propagation of satellite signals. All these influencing factors are related to the satellite elevation angles. Therefore, in this study, an elevation-dependent model is used to determine the weights of observations. Assuming that there is no correlation between the measurements of different types, from different satellites, or at different stations, the variances of undifferenced observations can be calculated as follows:
where
is the standard deviation (STD) of observations at zenith,
denotes the satellite elevation angle, and
is the STD of observations at the elevation angle
. In this contribution,
is set to 3 dm and 1.9 mm (one percent of chip length or wavelength) for the code and carrier phase observations from GPS satellites, respectively. It is considered that the accuracy of broadcast ephemeris and the quality of satellite signals of IRNSS are inferior to those of GPS, and thus the adopted
of the code and carrier phase observations from IRNSS satellites is empirically 1.5 times and 2.0 times as large as that of GPS code and phase, respectively (i.e., 4.5 dm and 3.8 mm).
7. Conclusions
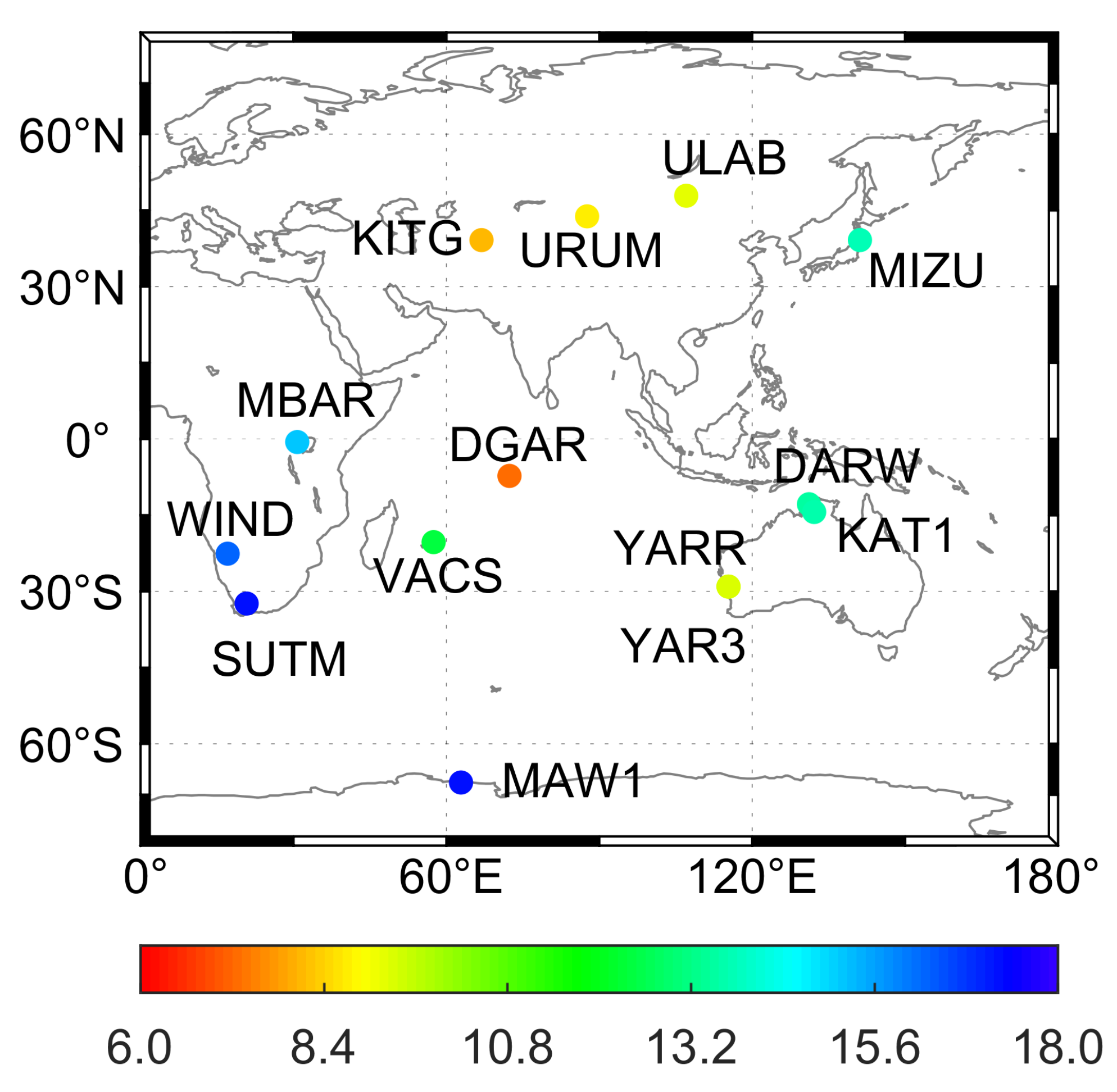
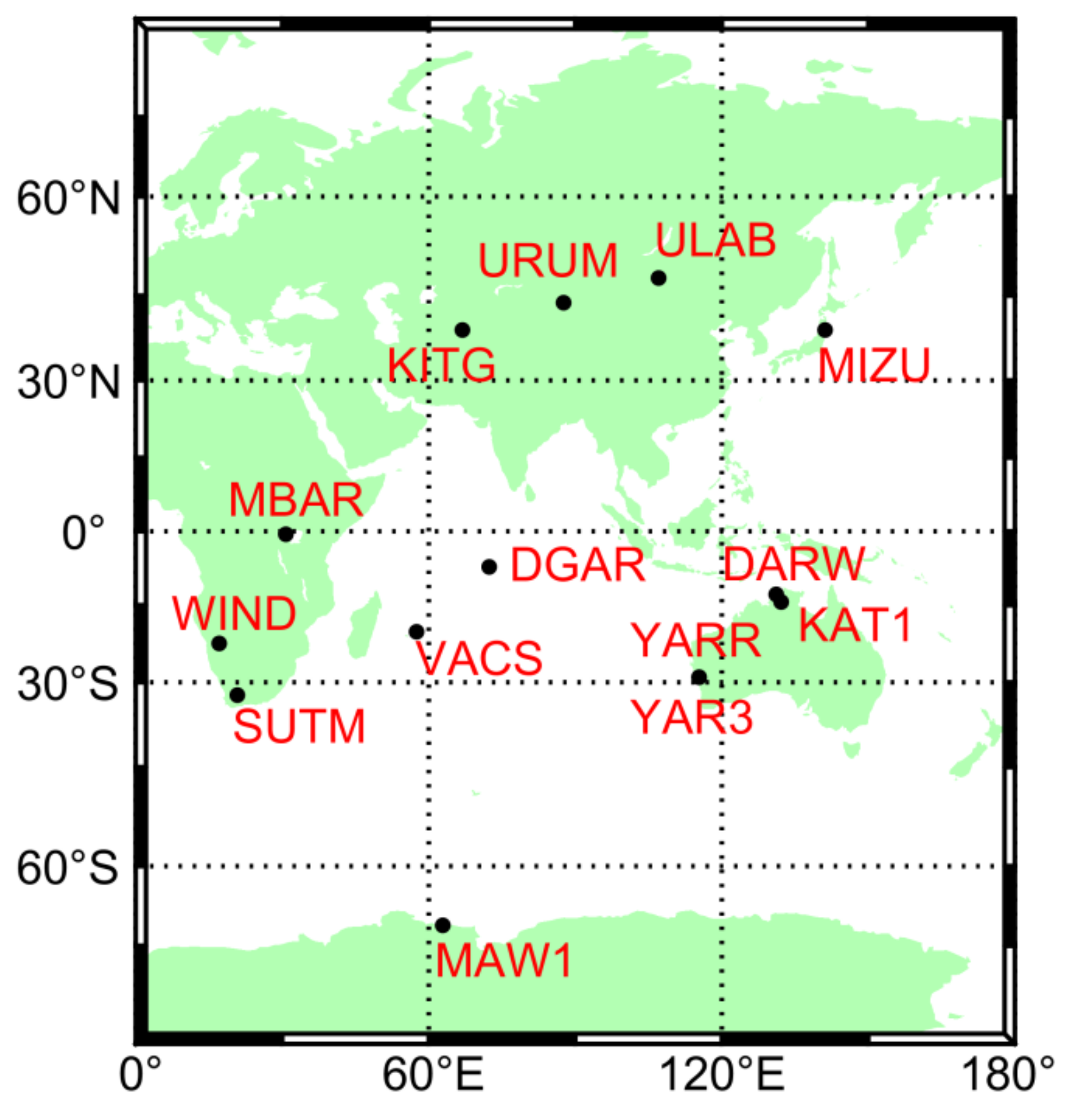
Currently, the IRNSS has eight in-orbit satellites, and has the preliminary capability to provide the standalone navigation and positioning services in the service areas. This contribution investigates the current status of IRNSS single-system data processing, including the availability (i.e., the number of visible satellites, the service rate, and the PDOP value), the single-frequency SPP performance, and the single-frequency short-baseline RTK positioning performance. For comparative analysis, the results of the GPS single-system case and the GPS/IRNSS dual-system combination case are also provided. The datasets from 14 MGEX stations spanning a week from 7–13 July 2019 are employed.
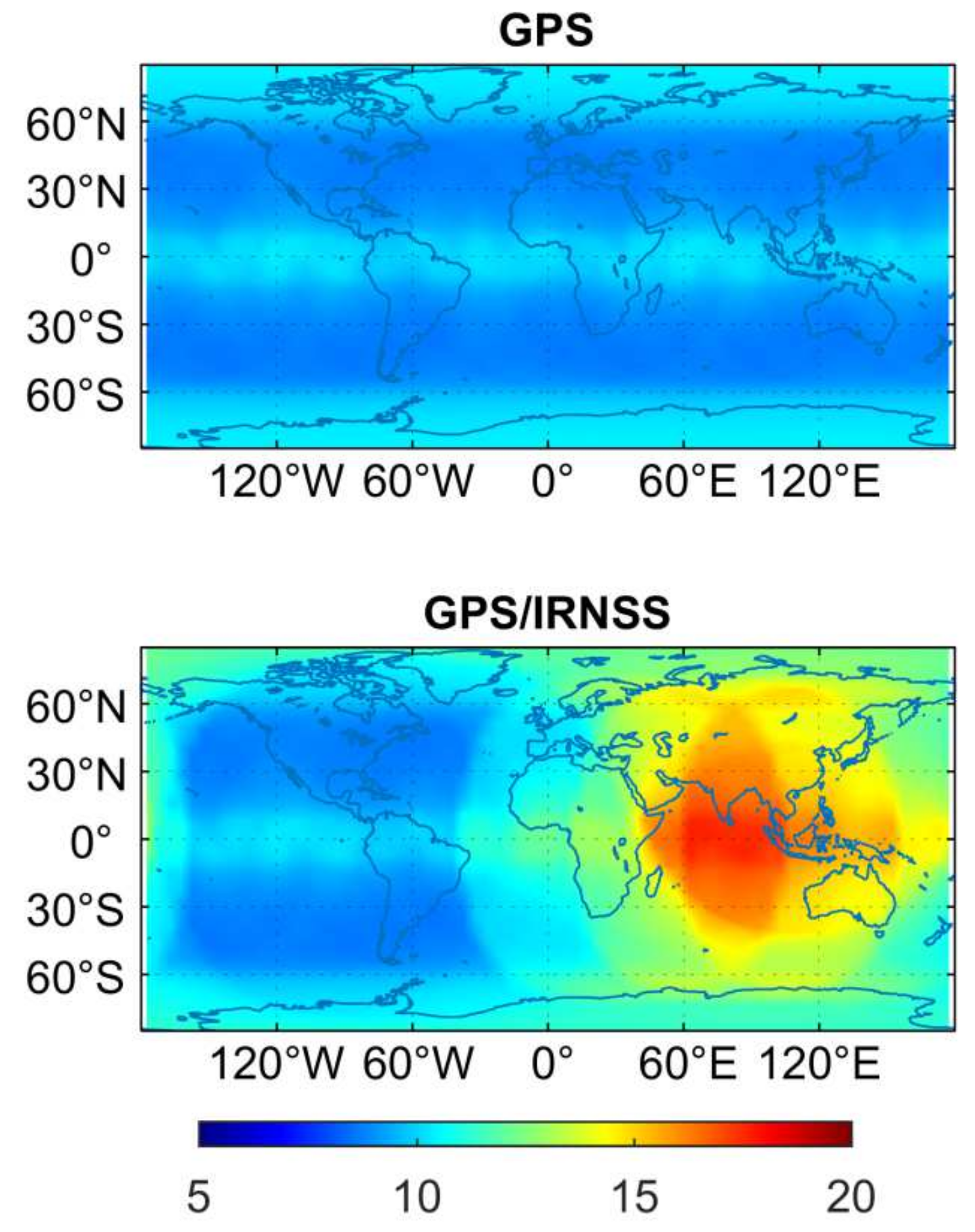
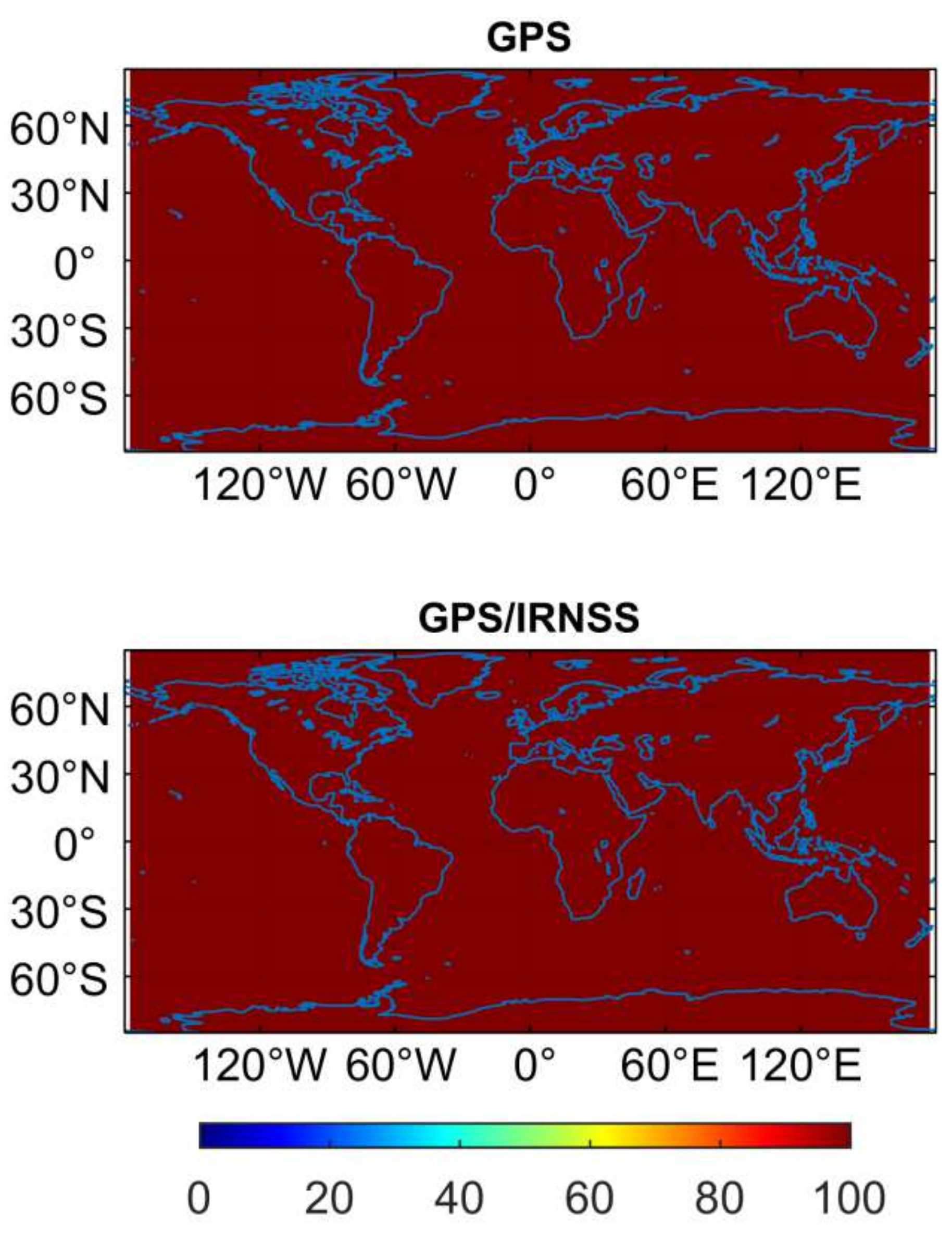
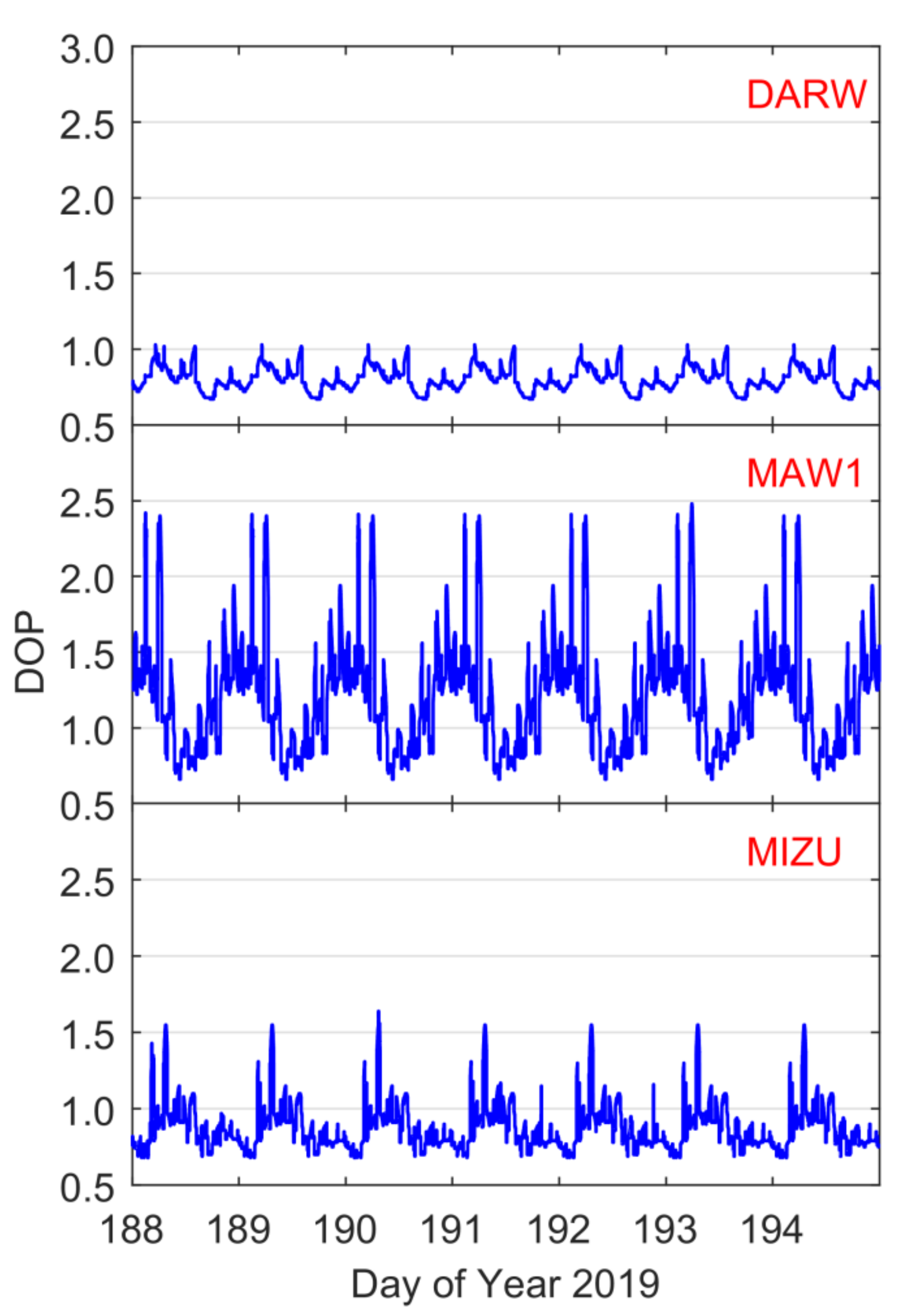
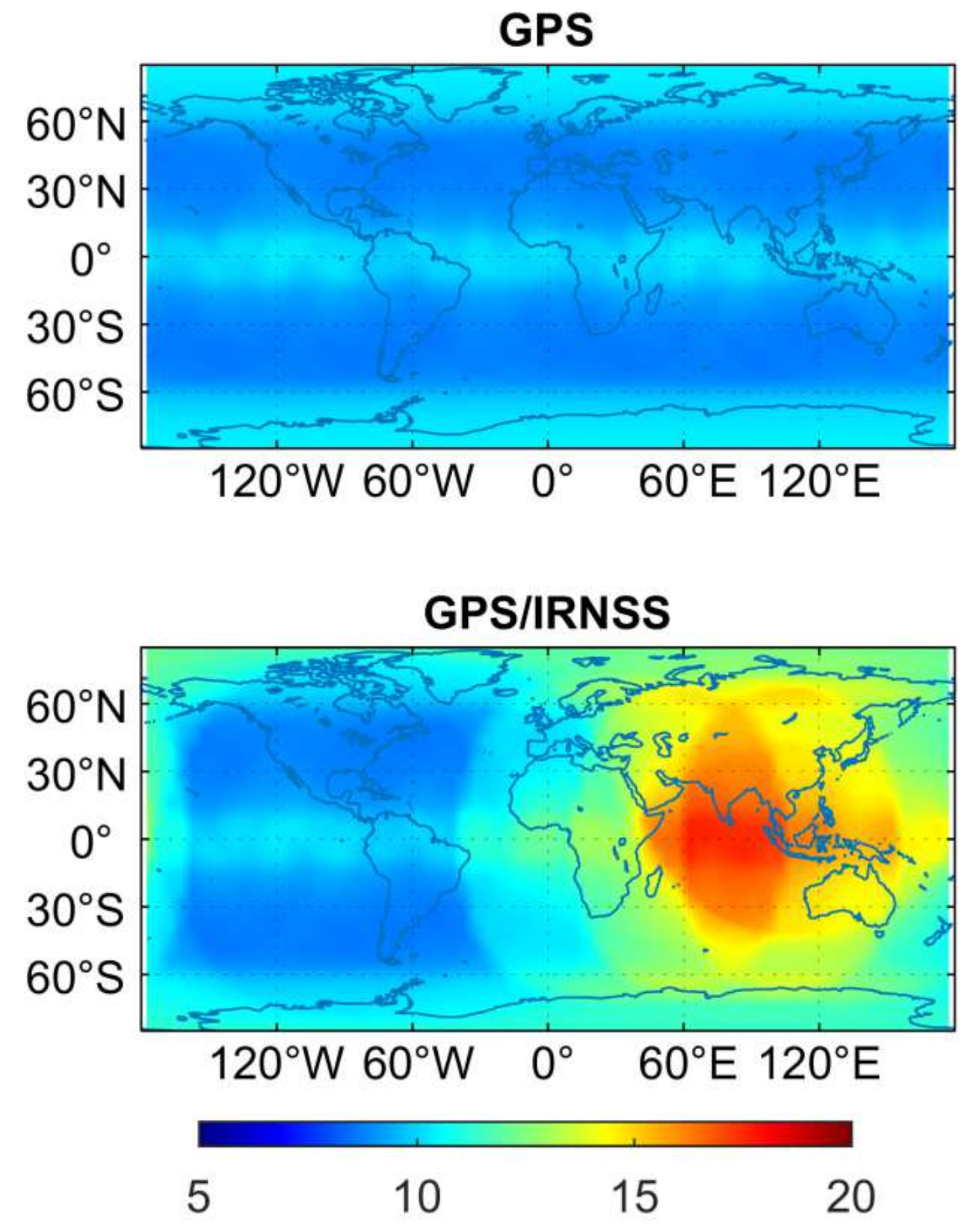
Regarding the theoretical availability of IRNSS constellation under a cut-off elevation angle of 10°, there are 6–8 visible IRNSS satellites in its primary service areas, and at least four IRNSS satellites can be tracked in the secondary service areas. The service rate of IRNSS-only cases in the primary service areas is nearly 100.0%, and the corresponding average value over the secondary service areas can still be up to 88.4%. The average PDOP value of IRNSS-only cases fall between 3.3 and 6.2 in the primary service areas, and is usually less than 15 in the secondary service areas. The GPS/IRNSS dual-system combination can significantly increase the number of visible satellites and reduce the PDOP value in the IRNSS service areas.
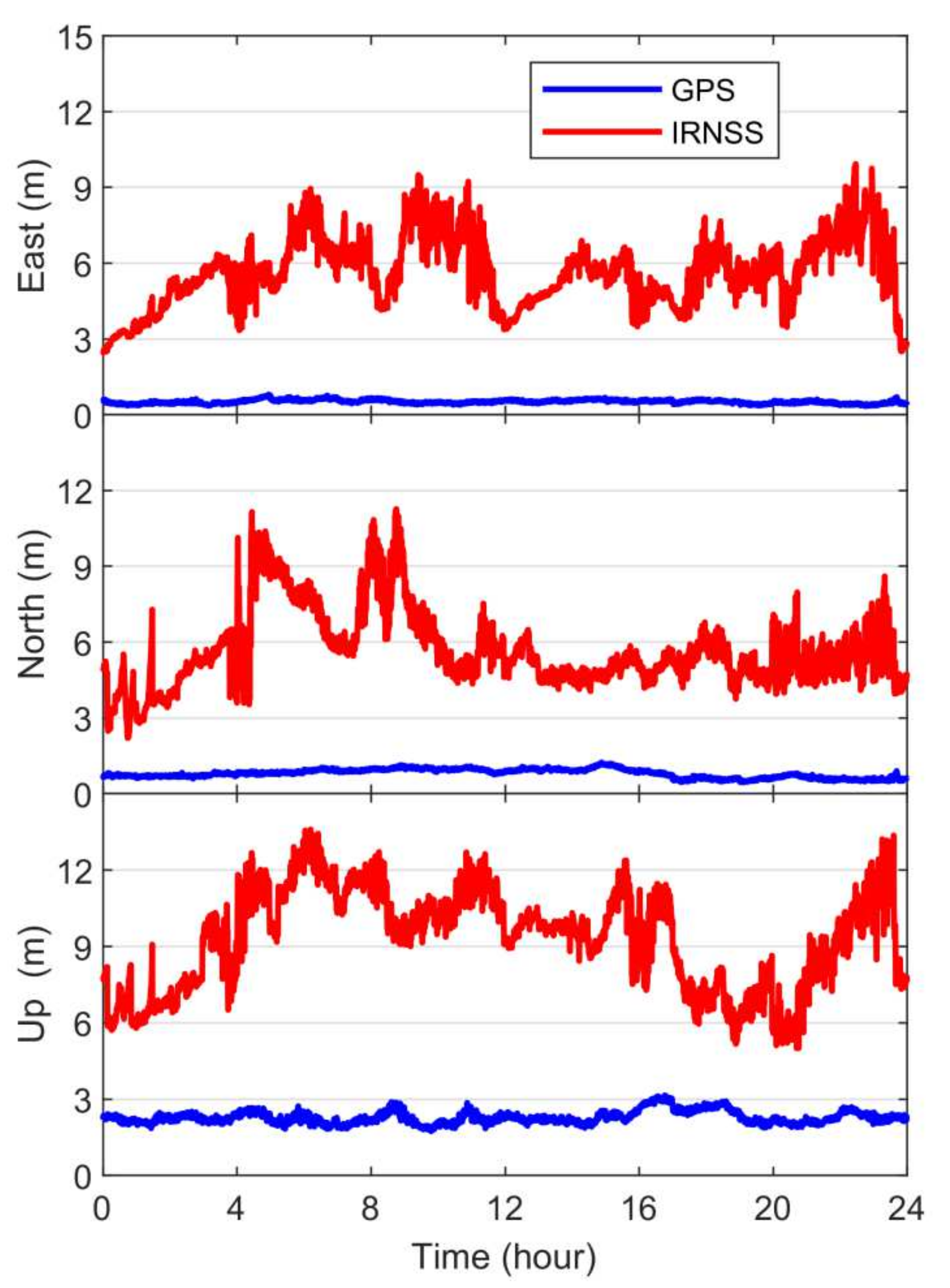
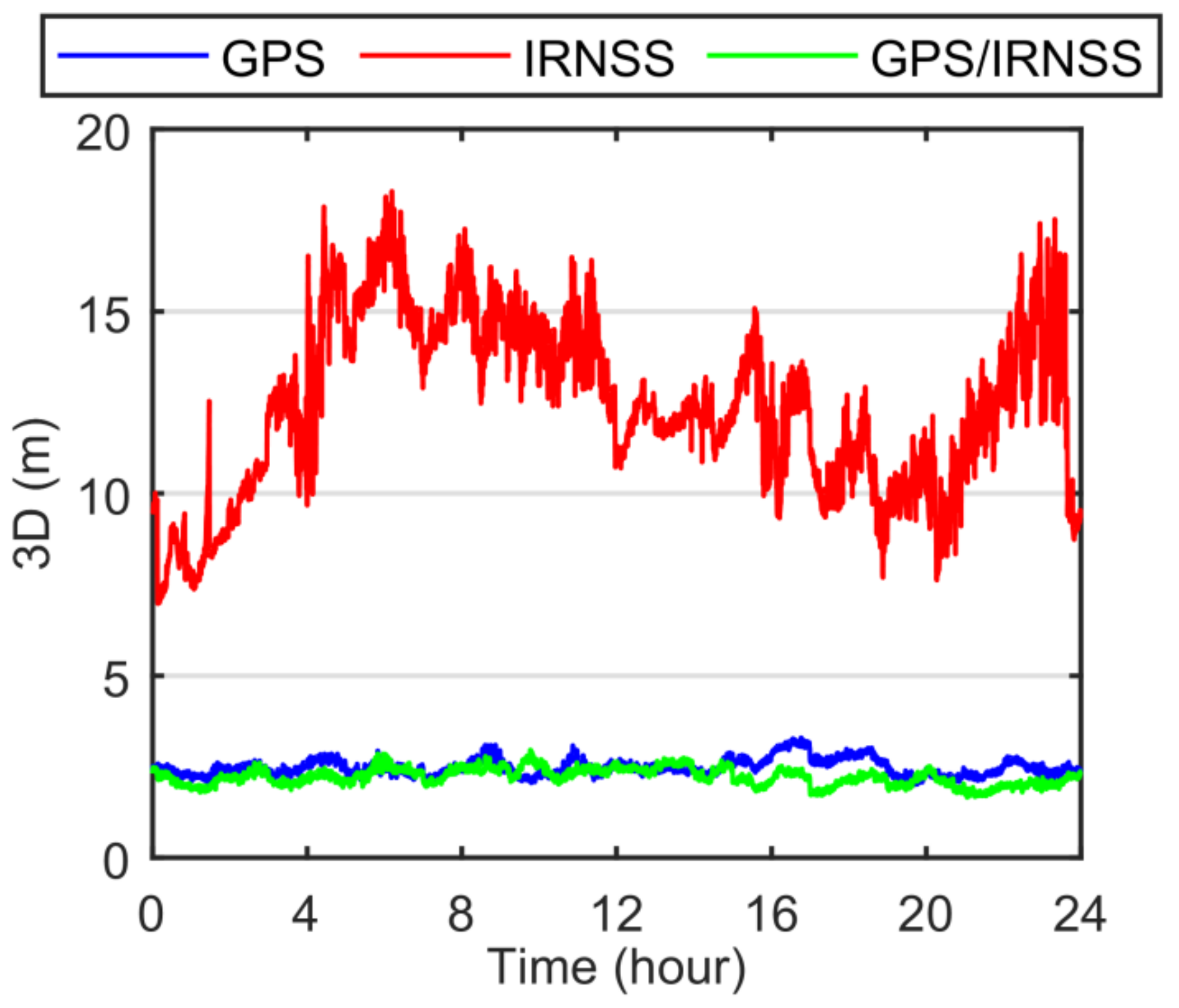
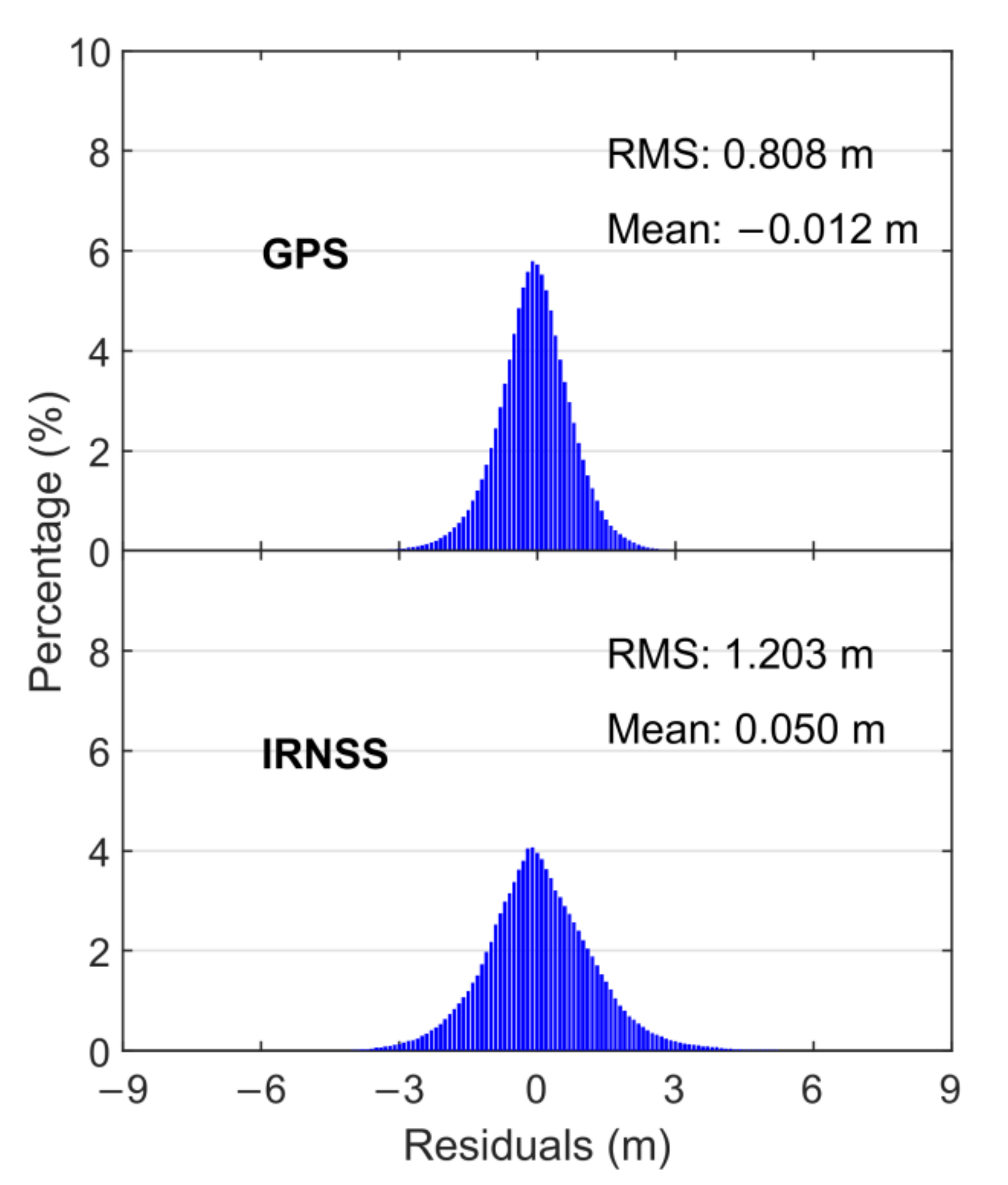
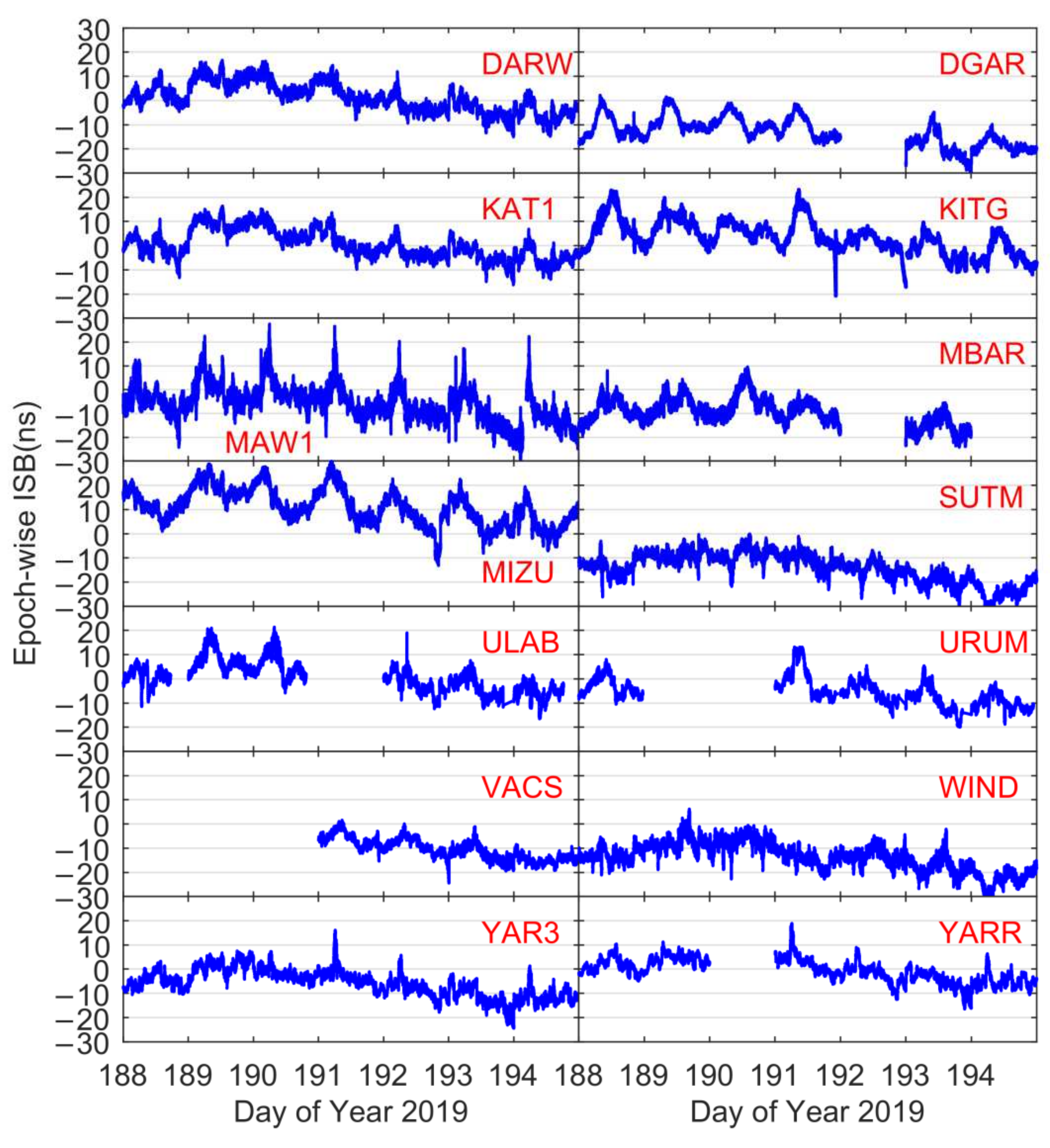
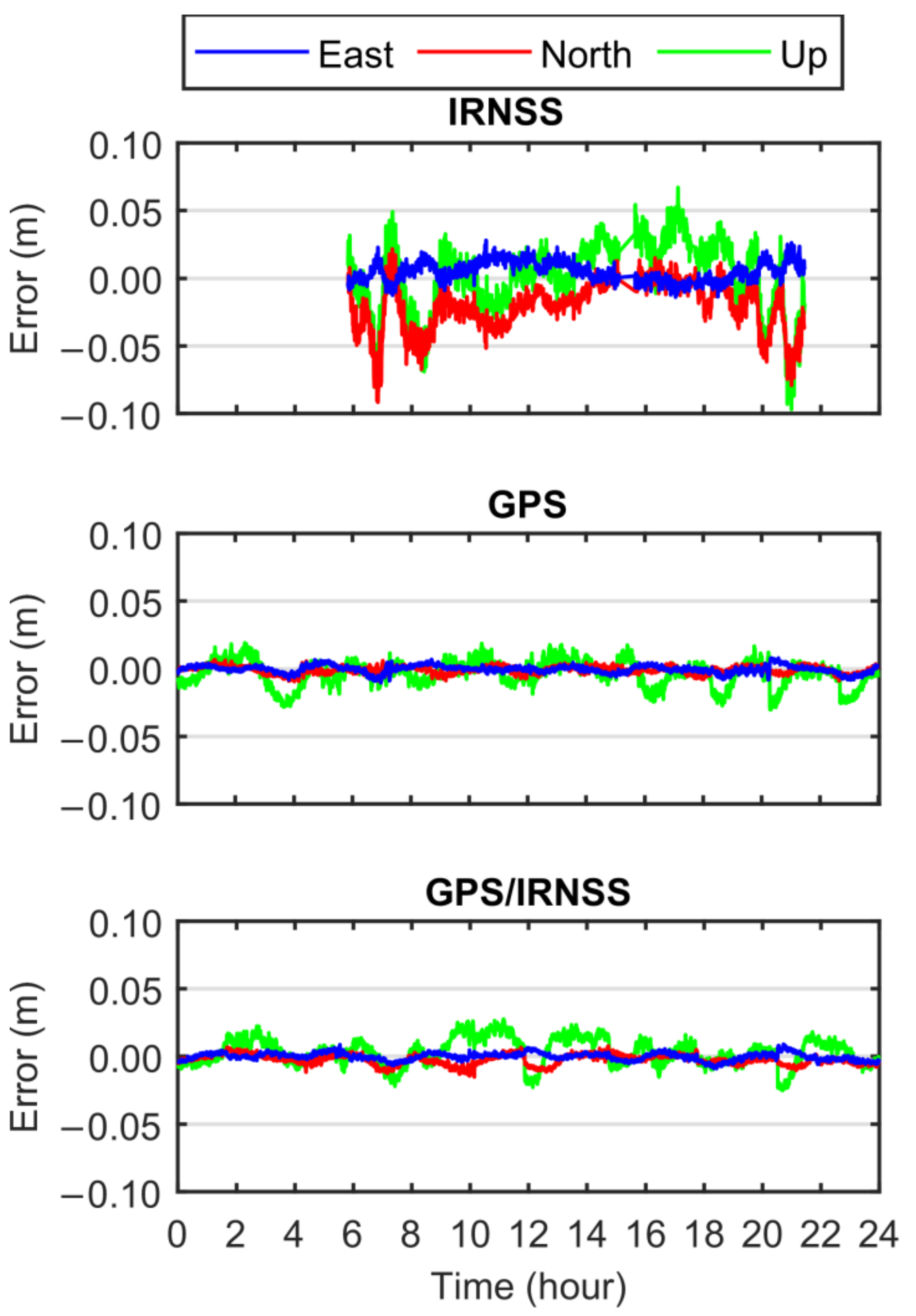
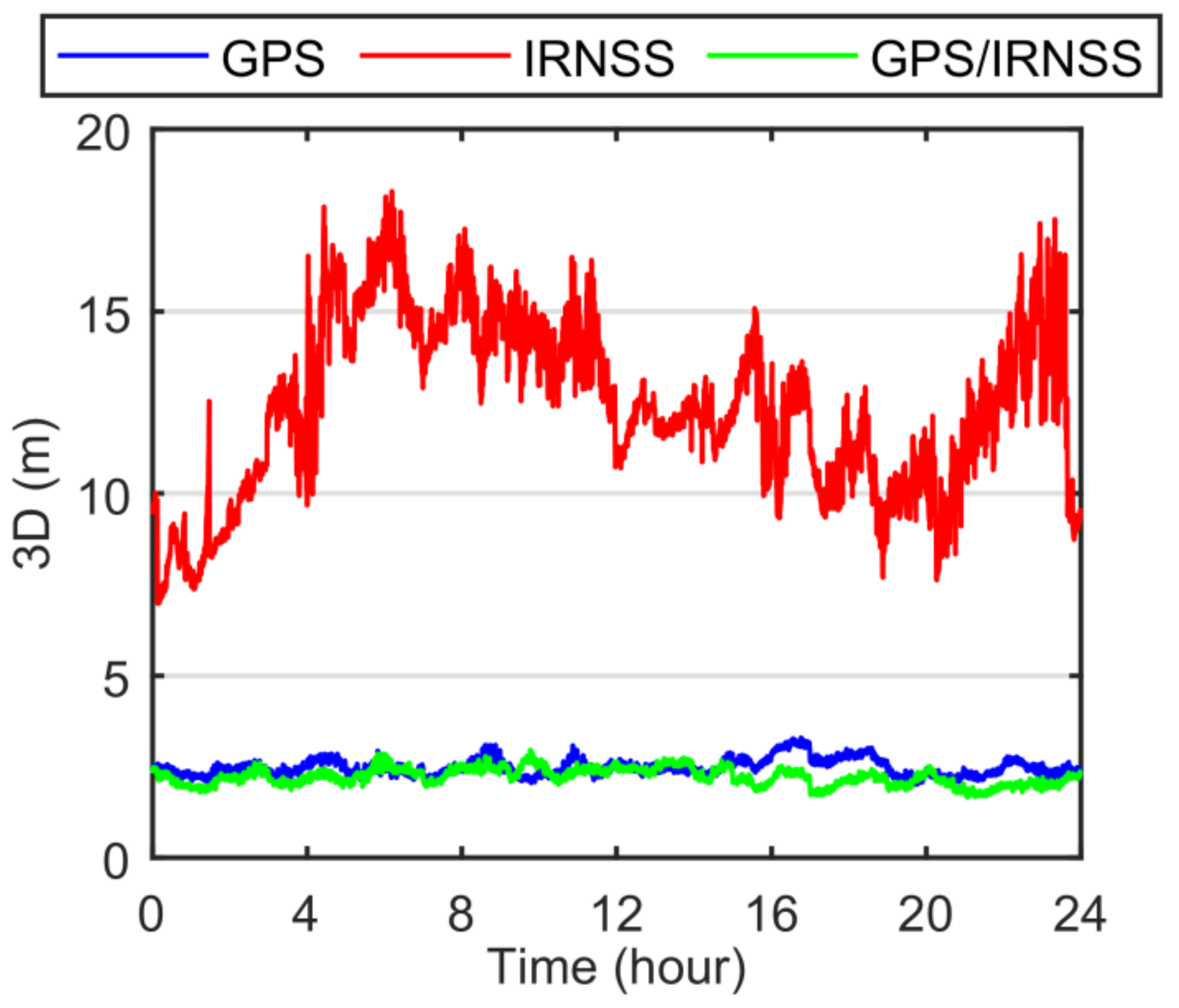
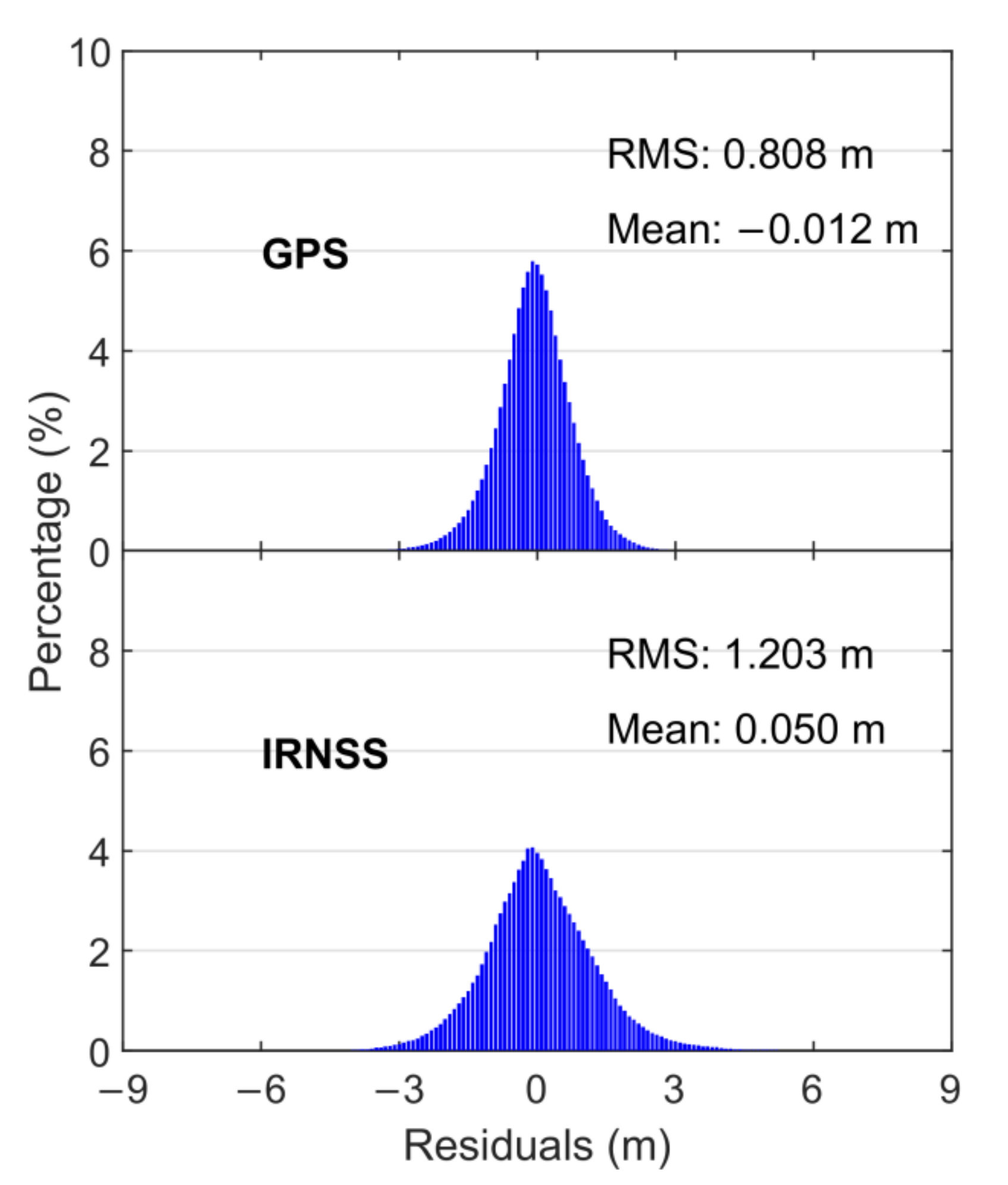
The positioning accuracies of the IRNSS single-system SPP are 6.031, 6.015, and 9.668 m in the east, north, and up directions, respectively, and those of the GPS single-system SPP are 0.519, 0.815, and 2.293 m in the three directions, respectively. The GPS/IRNSS dual-system combined SPP can improve the 3D positioning accuracy by 10.1% and 82.6% over the GPS-only and IRNSS-only cases, respectively. The RMS statistics of code observation residuals derived from the GPS/IRNSS integrated SPP solutions are 1.203 and 0.808 m for the IRNSS and GPS satellites, respectively. The time series of single-epoch ISB estimates between IRNSS and GPS (in the GPS/IRNSS combined SPP solutions) have an obvious periodic characteristic, which coincides with the satellite orbit repetition period (i.e., a day). Moreover, the epoch-wise ISBs vary within 30 ns for the 7-day datasets, which indicates that the ISB between IRNSS and GPS cannot be ignored. The service rate and ASR of the IRNSS single-system short-baseline RTK positioning are 71.5% and 64.0%, respectively, and those of the GPS single-system case are both close to 100.0%. The mean positioning biases of the IRNSS single-system short-baseline RTK positioning are 5.4, −21.1, and −0.2 mm in the three directions, respectively. The accuracy of the GPS-only short-baseline RTK is significantly better than that of the IRNSS-only case, and the corresponding errors decrease to −0.3, −0.1, and −3.4 mm in the three directions, respectively. Compared with the GPS single-system case, the mean positioning biases of the GPS/IRNSS combined short-baseline RTK are comparable and those in the east and up directions are slightly reduced. As to the STD value of the short-baseline RTK positioning errors, the condition is similar to that of the mean positioning biases. The STD statistics of the IRNSS-only solution are 7.8, 19.2, and 29.0 mm in the three directions, respectively, and the corresponding values are reduced by 61.5%, 85.4%, and 68.3%, and 65.4%, 80.7%, and 64.8% for GPS-only and GPS/IRNSS cases, respectively. The RMS values of carrier phase observation residuals derived from GPS/IRNSS combined short-baseline RTK positioning for GPS satellites are 5 mm, and those of IRNSS satellites increase to 12 mm.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}