
Robust Maritime Target Detector in Short Dwell Time


Abstract
1. Introduction
2. Motivation
2.1. Dwell Time on Marine Surveillance Radar
2.2. Conventional Maritime Target Detectors
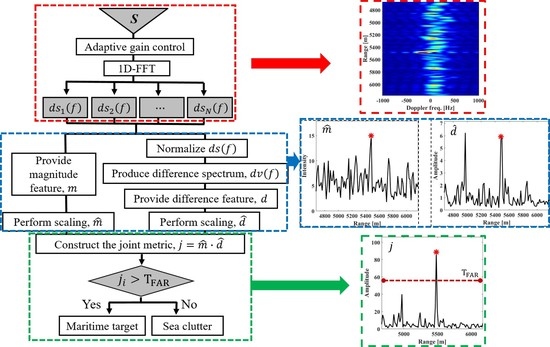
3. Proposed Maritime Target Detector
Step 1: Perform automatic gain control (AGC) and extract Doppler spectra of all range bins, , using a 1-D fast Fourier transform (FFT) on radar echoes, .
Step 2: Provide magnitude feature m by calculating the squared-root power of s.
Step 3.a: Conduct power normalization on .
Step 3.b: Employ the difference spectrum , where is the mean Doppler spectrum.
Step 3.c: Provide difference feature d by calculating the power of s.
Step 4: Construct the new joint metric , based on scaled m and d, and determine the range bin using an adaptive statistical detector.
3.1. Step1: Range-Doppler Map Formation
3.2. Step2: Magnitude Feature
3.3. Step3: Difference Feature
3.4. Step4: Proposed Joint Metric
4. Experimental Results
4.1. Performance Metric
4.2. Evaluation of Detection Performance Using Real Measured CSIR Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, J.E.; Lee, S.M.; Kim, C.H.; Kim, Y.S.; Lee, S.J.; Kim, K.T.; Kim, H.J.; Park, S.K. Effect of range resolution in the analysis of X-band sea clutter at low grazing angles. J. Electromagn. Waves Appl. 2019, 33, 2513–2528. [Google Scholar] [CrossRef]
- Rosenberg, L.; Bocquet, S. The Pareto distribution for high grazing angle sea-clutter. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 4209–4212. [Google Scholar]
- Zhou, W.; Xie, J.; Zhang, B.; Li, G. Maximum likelihood detector in gamma-distributed sea clutter. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1705–1709. [Google Scholar] [CrossRef]
- Zhao, J.; Jiang, R.; Wang, X.; Gao, H. Robust CFAR detection for multiple targets in K-distributed sea clutter based on machine learning. Symmetry 2019, 11, 1482. [Google Scholar] [CrossRef]
- Shui, P.L.; Li, D.C.; Xu, S.W. Tri-feature-based detection of floating small targets in sea clutter. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1416–1430. [Google Scholar] [CrossRef]
- Shi, S.N.; Shui, P.L. Sea-surface floating small target detection by one-class classifier in time-frequency feature space. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6395–6411. [Google Scholar] [CrossRef]
- Hu, J.; Tung, W.W.; Gao, J. Detection of low observable targets within sea clutter by structure function based multifractal analysis. IEEE Trans. Antennas Propag. 2006, 54, 136–143. [Google Scholar] [CrossRef]
- Luo, F.; Zhang, D.; Zhang, B. The fractal properties of sea clutter and their applications in maritime target detection. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1295–1299. [Google Scholar] [CrossRef]
- Chunsheng, X.; Hao, C.; Dong, X. Sea clutter characteristics analysis and target detection based on HHT. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; pp. 694–697. [Google Scholar]
- McDonald, M.K.; Cerutti-Maori, D. Coherent radar processing in sea clutter environments, part 2: Adaptive normalised matched filter versus adaptive matched filter performance. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1818–1833. [Google Scholar] [CrossRef]
- Orlando, D.; Venturino, L.; Lops, M.; Ricci, G. Track-before-detect strategies for STAP radars. IEEE Trans. Signal Process. 2009, 58, 933–938. [Google Scholar] [CrossRef]
- Davey, S.J.; Rutten, M.G.; Cheung, B. A comparison of detection performance for several track-before-detect algorithms. EURASIP J. Adv. Signal Process. 2007, 2008, 1–10. [Google Scholar] [CrossRef]
- Yujie, L.; Wenguang, W.; Jinping, S. Research of small target detection within sea clutter based on chaos. In Proceedings of the 2009 International Conference on Environmental Science and Information Application Technology, Wuhan, China, 4–5 July 2009; Volume 2, pp. 469–472. [Google Scholar]
- Hennessey, G.; Leung, H.; Drosopoulos, A.; Yip, P.C. Sea-clutter modeling using a radial-basis-function neural network. IEEE J. Ocean. Eng. 2001, 26, 358–372. [Google Scholar] [CrossRef]
- Gao, J.; Yao, K. Multifractal features of sea clutter. In Proceedings of the 2002 IEEE Radar Conference (IEEE Cat. No. 02CH37322), Long Beach, CA, USA, 25 April 2002; pp. 500–505. [Google Scholar]
- Orlando, D.; Ehlers, F.; Ricci, G. Track-before-detect algorithms for bistatic sonars. In Proceedings of the 2010 2nd International Workshop on Cognitive Information Processing, Elba, Italy, 14–16 June 2010; pp. 180–185. [Google Scholar]
- Orlando, D.; Ricci, G.; Bar-Shalom, Y. Track-before-detect algorithms for targets with kinematic constraints. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1837–1849. [Google Scholar] [CrossRef]
- Bole, A.G.; Wall, A.D.; Norris, A. Radar and ARPA Manual: Radar, AIS and Target Tracking for Marine Radar Users; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Nieto-Borge, J.; Hessner, K.; Jarabo-Amores, P.; De La Mata-Moya, D. Signal-to-noise ratio analysis to estimate ocean wave heights from X-band marine radar image time series. IET Radar Sonar Navig. 2008, 2, 35–41. [Google Scholar] [CrossRef]
- Miranda, S.; Baker, C.; Woodbridge, K.; Griffiths, H. Knowledge-based resource management for multifunction radar: A look at scheduling and task prioritization. IEEE Signal Process. Mag. 2006, 23, 66–76. [Google Scholar] [CrossRef]
- Herselman, P.; Baker, C.; De Wind, H. Analysis of X-band calibrated sea clutter and small boat reflectivity at medium-to-low grazing angles. Int. J. Navig. Obs. 2008, 2008. [Google Scholar] [CrossRef]
- Guangran, X.; Zicheng, D.; Wei, W.; Lang, H. Multi-beam dwell adaptive scheduling algorithm for helicopter-borne radar. In Proceedings of the 2014 IEEE 7th Joint International Information Technology and Artificial Intelligence Conference, Chongqing, China, 20–21 December 2014l; pp. 401–404. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Watts, S. Modeling and simulation of coherent sea clutter. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3303–3317. [Google Scholar] [CrossRef]
- Zhou, W.; Xie, J.; Li, G.; Du, Y. Robust CFAR detector with weighted amplitude iteration in nonhomogeneous sea clutter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1520–1535. [Google Scholar] [CrossRef]
- Watts, S.; Baker, C.; Ward, K. Maritime surveillance radar. Part 2: Detection performance prediction in sea clutter. In IEE Proceedings F (Radar and Signal Processing); IET: London, UK, 1990; Volume 137, pp. 63–72. [Google Scholar]
- Ward, K.D.; Watts, S.; Tough, R.J. Sea Clutter: Scattering, the K Distribution and Radar Performance; IET: London, UK, 2006; Volume 20. [Google Scholar]
- Ugarte, L.S.; de Miguel Vela, G.; Portas, J.A.B. Simulation model for sea clutter in airborne radars. In Proceedings of the 2011 8th European Radar Conference, Manchester, UK, 12–14 October 2011; pp. 77–80. [Google Scholar]
- Skolnik, M.I. Introduction to Radar Systems; McGraw-hill: New York, NY, USA, 1962; Volume 3. [Google Scholar]
- Wikipedia Contributors. Wind Wave—Wikipedia, The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/wiki/Wind_wave (accessed on 24 February 2021).
- Kiss, P.; Jánosi, I.M. Comprehensive empirical analysis of ERA-40 surface wind speed distribution over Europe. Energy Convers. Manag. 2008, 49, 2142–2151. [Google Scholar] [CrossRef]
- Kollu, R.; Rayapudi, S.R.; Narasimham, S.; Pakkurthi, K.M. Mixture probability distribution functions to model wind speed distributions. Int. J. Energy Environ. Eng. 2012, 3, 1–10. [Google Scholar] [CrossRef]
- Wikipedia Contributors. Gamma Distribution—Wikipedia, The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/wiki/Gamma_distribution (accessed on 18 March 2021).
- Wikipedia Contributors. Product Distribution—Wikipedia, The Free Encyclopedia. 2021. Available online: https://en.wikipedia.org/wiki/Product_distribution (accessed on 18 March 2021).
- Withers, C.S.; Nadarajah, S. On the product of gamma random variables. Qual. Quant. 2013, 47, 545–552. [Google Scholar] [CrossRef]
- Shui, P.; Guo, Z.; Shi, S. Feature-compression-based detection of sea-surface small targets. IEEE Access 2019, 8, 8371–8385. [Google Scholar] [CrossRef]
- Lee, M.J.; Kim, J.E.; Lee, S.M.; Ryu, B.H.; Kim, K.T. A study on modeling of sea clutter echo for short time of measurement. In Proceedings of the 8th Asia-Pacific Conference on Antennas Propagation, Incheon, South Korea, 4–7 August 2019; pp. 1–2. [Google Scholar]
- Satorra, A.; Bentler, P.M. A scaled difference chi-square test statistic for moment structure analysis. Psychometrika 2001, 66, 507–514. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| File Name | Range (m) / # of Range-Bins | Tracking Range (m) | Total Duration Time (sec) | Sea State | Wave Direction () | PRF (kHz) | Grazing Angle () |
|---|---|---|---|---|---|---|---|
| 00-011 | 1499/101 | 2274.4 | 34.22 | 4.5 | 261.7 | 2.0 | 4.67–7.78 |
| 00-012 | 1499/101 | 2424.3 | 29.50 | 4.5 | 261.7 | 2.0 | 4.67–7.78 |
| 00-017 | 1499/101 | 4672.8 | 49.17 | 4.5 | 261.7 | 2.0 | 2.84–3.76 |
| File Name | ||||
|---|---|---|---|---|
| Rayleigh | Log-Normal | Normal | Gamma | |
| 00-011 | 9.64 | 12.83 | 0.17 | 0.06 |
| 00-012 | 2.37 | 2.63 | 0.31 | 0.14 |
| 00-017 | 3.80 | 3.19 | 0.37 | 0.14 |
| Detectors | |||
|---|---|---|---|
| T = 5 ms | T = 15 ms | T = 25 ms | |
| J | 0.684 | 0.640 | 0.639 |
| EMD | 0.198 | 0.248 | 0.253 |
| Fractal | 0.027 | 0.100 | 0.142 |
| RBF-NN | 0.204 | 0.230 | 0.285 |
| Detectors | |||
|---|---|---|---|
| T = 5 ms | T = 15 ms | T = 25 ms | |
| J | 0.296 | 0.295 | 0.295 |
| EMD | 0.083 | 0.102 | 0.109 |
| Fractal | 6.08 × 10 | 0.045 | 0.050 |
| RBF-NN | 0.018 | 0.046 | 0.061 |
| Detectors | Processing Time [ms] | ||||
|---|---|---|---|---|---|
| T = 5 ms | T = 10 ms | T = 15 ms | T = 20 ms | T = 25 ms | |
| J | 26.6 | 26.4 | 26.3 | 26.2 | 26.2 |
| EMD | 296.3 | 418.0 | 545.0 | 599.1 | 691.3 |
| Fractal | 86.3 | 87.8 | 89.3 | 96.5 | 99.1 |
| RBF-NN | 5.6 | 9.8 | 12.5 | 26.9 | 31.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, M.-J.; Kim, J.-E.; Ryu, B.-H.; Kim, K.-T. Robust Maritime Target Detector in Short Dwell Time. Remote Sens. 2021, 13, 1319. https://doi.org/10.3390/rs13071319
Lee M-J, Kim J-E, Ryu B-H, Kim K-T. Robust Maritime Target Detector in Short Dwell Time. Remote Sensing. 2021; 13(7):1319. https://doi.org/10.3390/rs13071319
Chicago/Turabian StyleLee, Myung-Jun, Ji-Eun Kim, Bo-Hyun Ryu, and Kyung-Tae Kim. 2021. "Robust Maritime Target Detector in Short Dwell Time" Remote Sensing 13, no. 7: 1319. https://doi.org/10.3390/rs13071319
APA StyleLee, M.-J., Kim, J.-E., Ryu, B.-H., & Kim, K.-T. (2021). Robust Maritime Target Detector in Short Dwell Time. Remote Sensing, 13(7), 1319. https://doi.org/10.3390/rs13071319