Daily River Discharge Estimation Using Multi-Mission Radar Altimetry Data and Ensemble Learning Regression in the Lower Mekong River Basin

 ,
,  ,
,  and
and
Abstract

1. Introduction
2. Study Area and Datasets
2.1. Mekong River
2.2. Radar Altimetry Data
3. Methods
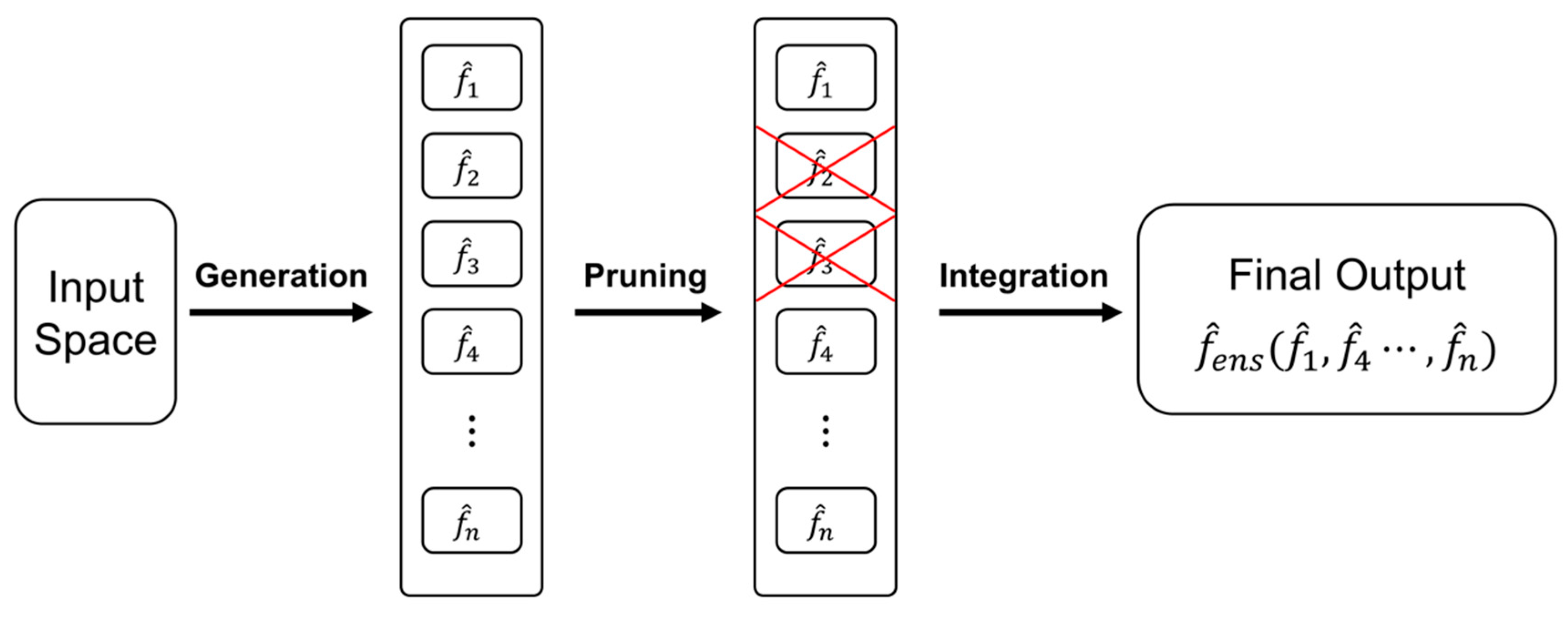
3.1. Ensemble Learning and ELQ: A Brief Review
3.2. Generating Base Learners
- Step (1): Calculate relative water stages (); subtract from interpolated H.
- Step (2): Obtain the coefficient of determination () using the – relationship with 0.1-m increments on .
- Step (3): Find the optimum , where of the – relationship is maximized.
3.3. Integrating Base Learners
3.4. Combining Multiple Radar Altimetry Missions
3.5. Performance Comparison
4. Results
4.1. Estimating River Discharge Using Envisat-Derived Water Levels
4.2. Estimating River Discharge Using Jason-2-Derived Water Levels
5. Discussions
5.1. Analysis of ELQ’s Performance
5.2. Parsimonious Model of ELQ
5.3. ELQ Versus AMHG?
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vörösmarty, C.J.; Green, P.; Salisbury, J.; Lammers, R.B. Global water resources: Vulnerability from climate change and population growth. Science 2000, 289, 284–288. [Google Scholar] [CrossRef] [PubMed]
- Alsdorf, D.E.; Rodriguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45, 1–24. [Google Scholar] [CrossRef]
- Shiklomanov, A.I.; Lammers, R.B.; Vörösmarty, C.J. Widespread decline in hydrological monitoring threatens pan-Arctic research. Eos Trans. 2002, 83, 13–17. [Google Scholar] [CrossRef]
- Bjerklie, D.M.; Birkett, C.M.; Jones, J.W.; Carabajal, C.; Rover, J.A.; Fulton, J.W.; Garambois, P.A. Satellite remote sensing estimation of river discharge: Application to the Yukon River Alaska. J. Hydrol. 2018, 561, 1000–1018. [Google Scholar] [CrossRef]
- Sichangi, A.W.; Wang, L.; Yang, K.; Chen, D.; Wang, Z.; Li, X.; Zhou, J.; Liu, W.; Kuria, D. Estimating continental river basin discharges using multiple remote sensing data sets. Remote Sens. Environ. 2016, 179, 36–53. [Google Scholar] [CrossRef]
- Manning, R. On the flow of water in open channels and pipes. Inst. Civ. Eng. Irel. Trans. 1891, 20, 161–207. [Google Scholar]
- Smith, L.C.; Pavelsky, T.M. Estimation of river discharge, propagation speed, and hydraulic geometry from space: Lena River, Siberia. Water Resour. Res. 2008, 44, W03427. [Google Scholar] [CrossRef]
- Paris, A.; Dias de Paiva, R.; Santos da Silva, J.; Medeiros Moreira, D.; Calmant, S.; Garambois, P.A.; Collischonn, W.; Bonnet, M.P.; Seyler, F. Stage-discharge rating curves based on satellite altimetry and modeled discharge in the Amazon basin. Water Resour. Res. 2016, 52, 3787–3814. [Google Scholar] [CrossRef]
- Leopold, L.B.; Maddock, T. The Hydraulic Geometry of Stream Channels and Some Physiographic Implications; U.S. Government Printing Office: Washington, DC, USA, 1953; Volume 252.
- Richard, K.S. Complex width-discharge relations in natural river sections. Geol. Soc. Am. Bull. 1976, 87, 199–206. [Google Scholar] [CrossRef]
- Phillips, J.D. The instability of hydraulic geometry. Water Resour. Res. 1990, 26, 739–744. [Google Scholar] [CrossRef]
- Jowett, I.G. Hydraulic geometry of New Zealand rivers and its use as a preliminary method of habitat assessment. Regul. Rivers Res. Mgmt. 1998, 14, 451–466. [Google Scholar] [CrossRef]
- Mersel, M.K.; Smith, L.C.; Andreadis, K.M.; Durand, M.T. Estimation of river depth from remotely sensed hydraulic relationships. Water Resour. Res. 2013, 49, 3165–3179. [Google Scholar] [CrossRef]
- Kim, D.; Yu, H.; Beighley, E.; Durand, M.; Alsdorf, D.E. Ensemble learning regression for estimating river discharges using satellite altimetry data: Central Congo River as a test-bed. Remote Sens. Environ. 2019, 221, 741–755. [Google Scholar] [CrossRef]
- Roux, E.; Cauhope, M.; Bonnet, M.P.; Calmant, S.; Vauchel, P.; Seyler, F. Daily water stage estimated from satellite altimetric data for large river basin monitoring. Hydrol. Sci. J. 2008, 53, 81–99. [Google Scholar] [CrossRef]
- Kim, D.; Lee, H.; Laraque, A.; Tshimanga, R.M.; Yuan, T.; Jung, H.C.; Beighley, E.; Chang, C.H. Mapping spatio-temporal water level variations over the central Congo River using PALSAR ScanSAR and Envisat altimetry data. Int. J. Remote Sens. 2017, 38, 7021–7040. [Google Scholar] [CrossRef]
- Kim, D.; Lee, H.; Beighley, E.; Tshimanga, R.M. Estimating discharges for poorly gauged river basin using ensemble learning regression with satellite altimetry data and a hydrologic model. Adv. Space Res. 2019, in press. [Google Scholar] [CrossRef]
- Mekong River Commission. Overview of the Hydrology of the Mekong Basin; Mekong River Commission: Vientiane, Lao PDR, 2005; p. 82. [Google Scholar]
- Kummu, M.; Sarkkula, J. Impact of the Mekong River flow alteration on the Tonle Sap flood pulse. AMBIO 2008, 37, 185–192. [Google Scholar] [CrossRef]
- Pagano, T.C. Evaluation of Mekong River Commission operational flood forecasts, 2000–2012. Hydrol. Earth Syst. Sci. 2014, 18, 2645–2656. [Google Scholar] [CrossRef]
- Chang, C.H.; Lee, H.; Hossain, F.; Basnayake, S.; Jayasinghe, S.; Chishtie, F.; Saah, D.; Yu, H.; Sothea, K.; Du Bui, D. A model-aided satellite-altiemtry-based flood forecasting system for the Mekong River. Environ. Model. Softw. 2019, 112, 112–127. [Google Scholar] [CrossRef]
- Wang, W.; Lu, H.; Yang, D.; Sothea, K.; Jiao, Y.; Gao, B.; Peng, X.; Pang, Z. Modelling hydrologic processes in the Mekong River Basin using a distributed model driven by satellite precipitation and rain gauge observations. PLoS ONE 2016, 11, e0152229. [Google Scholar] [CrossRef]
- Mohammed, I.N.; Bolten, J.D.; Srinivasa, R.; Lakshmi, V. Satellite observations and modeling to understand the Lower Mekong River Basin streamflow variability. J. Hydrol. 2018, 564, 559–573. [Google Scholar] [CrossRef]
- Delgado, J.M.; Apel, H.; Merz, B. Flood trends and variability in the Mekong river. Hydrol. Earth Syst. Sci. 2010, 14, 407–418. [Google Scholar] [CrossRef]
- Hossain, F.; Sikder, S.; Biswas, N.; Bonnema, M.; Lee, H.; Luong, N.D.; Hiep, N.H.; Du Duong, B.; Long, D. Predicting water availability of the regulated Mekong river basin using satellite observations and a physical model. Asian J. Water Environ. 2017, 14, 39–48. [Google Scholar] [CrossRef]
- Bogning, S.; Frappart, F.; Blarel, F.; Niño, F.; Mahé, G.; Bricquet, J.P.; Seyler, F.; Onguéné, R.; Etamé, J.; Paiz, M.C.; et al. Monitoring water levels and discharges using radar altimetry in an ungauged river basin: The case of the Ogooué. Remote Sens. 2018, 10, 350. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; Moore, P.; Kilsby, C.G.; O’donnell, G.M.; Hardy, A.J.; Berry, P.A.M. Daily discharge estimation at ungauged river sites using remote sensing. Hydrol. Process. 2014, 28, 1043–1054. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; O’donnell, G.M.; Moore, P.; Kilsby, C.G.; Fowler, H.J.; Berry, P.A.M. Using satellite altimetry data to augment flow estimation techniques on the Mekong River. Hydrol. Process. 2010, 24, 3811–3825. [Google Scholar] [CrossRef]
- Mohammed, I.N.; Bolten, J.D.; Srinivasan, R.; Meechaiya, C.; Spruce, J.P.; Lakshmi, V. Ground and satellite based observation datasets for the Lower Mekong River Basin. Data Brief. 2018, 21, 2020–2027. [Google Scholar] [CrossRef]
- Frappart, F.; Calmant, S.; Cauhopé, M.; Seyler, F.; Cazenave, A. Preliminary results of ENVISAT RA-2-derived water levels validation over the Amazon basin. Remote Sens. Environ. 2006, 100, 252–264. [Google Scholar] [CrossRef]
- Lee, H.; Shum, C.K.; Emery, W.; Calmant, S.; Deng, X.; Kuo, C.Y.; Roesler, C.; Yi, Y. Validation of Jason-2 altimeter data by waveform retracking over California coastal ocean. Mar. Geod. 2010, 33, 304–316. [Google Scholar] [CrossRef]
- Fernandes, M.; Lázaro, C.; Nunes, A.; Scharroo, R. Atmospheric corrections for altimetry studies over inland water. Remote Sens. 2014, 6, 4952–4997. [Google Scholar] [CrossRef]
- Siddique-E-Akbor, A.H.M.; Hossain, F.; Lee, H.; Shum, C.K. Inter-comparison study of water level estimates derived from hydrodynamic–hydrologic model and satellite altimetry for a complex deltaic environment. Remote Sens. Environ. 2011, 115, 1522–1531. [Google Scholar] [CrossRef]
- Okeowo, M.A.; Lee, H.; Hossain, F.; Getirana, A. Automated generation of lakes and reservoirs water elevation changes from satellite radar altimetry. IEEE J. STARS 2017, 10, 3465–3481. [Google Scholar] [CrossRef]
- Schwatke, C.; Dettmering, D.; Bosch, W.; Seitz, F. DAHITI—An innovative approach for estimating water level time series over inland waters using multi-mission satellite altimetry. Hydrol. Earth Syst. Sci. 2015, 19, 4345–4364. [Google Scholar] [CrossRef]
- Brown, G. Ensemble learning. In Encyclopedia of Machine Learning; Sammut, C., Webb, G.I., Eds.; Springer: Boston, MA, USA, 2011; pp. 312–320. [Google Scholar]
- Zhou, Z.H. Ensemble learning. In Encyclopedia of Biometrics; Li, S.Z., Jain, A., Eds.; Springer: Boston, MA, USA, 2015; pp. 411–416. [Google Scholar]
- Mendes-Moreira, J.; Soares, C.; Jorge, A.M.; Sousa, J.F.D. Ensemble approaches for regression: A survey. ACM Comput. Surv. 2012, 45, 10. [Google Scholar] [CrossRef]
- Roli, F.; Giacinto, G.; Vernazza, G. Methods for designing multiple classifier systems. In International Workshop on Multiple Classifier Systems; Springer: Berlin, Germany, 2001; pp. 78–87. [Google Scholar]
- Schapire, R.E.; Freund, Y. Boosting: Foundations and algorithms. In Adaptive Computation and Machine Learning Series; Dietterich, T., Ed.; MIT Press: London, UK, 2012; pp. 1–527. [Google Scholar]
- Zhou, Z.H. Ensemble learning. In Encyclopedia of Database Systems; Liu, L., Özsu, M.T., Eds.; Springer: Boston, MA, USA, 2009; pp. 988–991. [Google Scholar]
- Krzywinski, M.; Altman, N. Visualizing samples with box plots. Nat. Methods 2014, 11, 119–120. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I–A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Dingman, S.L. Statistical concepts useful in hydrology. In Physical Hydrology, 2nd ed.; Dingman, S.L., Ed.; Waveland Press, Inc.: Long Grove, IL, USA, 2002; pp. 552–581. [Google Scholar]
- Murphy, K.P. Introduction. In Machine Learning: A Probabilistic Perspective; Murphy, K.P., Ed.; MIT Press: London, UK, 2014; pp. 1–26. [Google Scholar]
- Dietterich, T.G. Machine-learning research. AI Mag. 1997, 18, 97. [Google Scholar]
- Brown, G.; Wyatt, J.; Harris, R.; Yao, X. Diversity creation methods: A survey and categorisation. Inf. Fusion 2005, 6, 5–20. [Google Scholar] [CrossRef]
- Kim, D.; Lee, H.; Yu, H.; Jayasinghe, S.; Basnayake, S.B.; Chishtie, F.; Bui, D.D.; Nguyen, L.D.; Hwang, E. Deriving Daily Discharges from Satellite Radar Altimetry and Ensemble Learning Regression in Poorly Gauged River Basins. In Proceedings of the AGU Fall Meeting, Washington, DC, USA, 10–14 December 2018. Abstract Number GC31K–1384. [Google Scholar]
- Breiman, L. Stacked regressions. Mach. Learn. 1996, 24, 49–64. [Google Scholar] [CrossRef]
- Schuenemeyer, J.H.; Drew, L.J. Modeling Concepts. In Statistics for Earth and Environmental Scientists; Schuenemeyer, J.H., Drew, L.J., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2011; pp. 37–50. [Google Scholar]
- Gleason, C.J.; Smith, L.C. Toward global mapping of river discharge using satellite images and at-many-stations hydraulic geometry. Proc. Natl. Acad. Sci. USA 2014, 111, 4788–4791. [Google Scholar] [CrossRef]
- Gleason, C.J.; Smith, L.C.; Lee, J. Retrieval of river discharge solely from satellite imagery and at-many-stations hydraulic geometry: Sensitivity to river form and optimization parameters. Water Resour. Res. 2014, 50, 9604–9619. [Google Scholar] [CrossRef]
- Gleason, C.J.; Wang, J. Theoretical basis for at-many-stations hydraulic geometry. Geophys. Res. Lett. 2015, 42, 7107–7114. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Location (Lat/Lon) | Start Date | End Date | Data Source |
|---|---|---|---|---|
| Stung Treng | 13.533°N/105.950°E | 2003/01/01 | 2012/12/31 | [22] |
| Kratie | 12.481°N/106.018°E | 2003/01/01 | 2016/12/31 | [29] |
| Tan Chau | 10.801°N/105.248°E | 2003/01/01 | 2006/12/31 | ADPC 1 |
| 2013/01/01 | 2016/12/31 | NAWAPI 2 |
| Virtual Station | Location (Lat/Lon) | Used Altimetry Mission, Pass Number |
|---|---|---|
| EnvP565A | 11.932°N/105.276°E | Envisat, 565 |
| EnvP021A | 12.270°N/105.911°E | Envisat, 021 |
| EnvP952 | 12.621°N/104.268°E | Envisat, 952 |
| EnvP866 | 13.845°N/105.986°E | Envisat, 866 |
| EnvP021B | 16.279°N/104.990°E | Envisat, 021 |
| EnvP565B | 18.345°N/103.795°E | Envisat, 565 |
| EnvP651 | 17.980°N/102.442°E | Envisat, 651 |
| J140 | 12.010°N/105.474°E | Jason-2, 140 |
| J001L | 12.507°N/104.474°E | Jason-2, 001 |
| J001U | 15.323°N/105.561°E | Jason-2, 001 |
| J179 | 18.335°N/103.934°E | Jason-2, 179 |
| VS | Stung Treng | Kratie | Tan Chau |
|---|---|---|---|
| EnvP565A | 9.7 | 6.3 | 0.6 |
| EnvP021A | 5.0 | 4.6 | 0.0 |
| EnvP952 | 28.4 | 24.8 | 2.2 |
| EnvP866 | 3.9 | 6.8 | 0.0 |
| EnvP021B | 0.8 | 0.3 | 0.0 |
| EnvP565B | 5.5 | 4.2 | 0.0 |
| EnvP651 | 10.9 | 13.7 | 0.0 |
| VS | Stung Treng | Kratie | Tan Chau |
|---|---|---|---|
| EnvP565A | 0.81 | 0.79 | 0.88 |
| EnvP021A | 0.93 | 0.90 | 0.83 |
| EnvP952 | 0.46 | 0.47 | 0.80 |
| EnvP866 | 0.95 | 0.93 | 0.80 |
| EnvP021B | 0.93 | 0.90 | 0.74 |
| EnvP565B | 0.80 | 0.80 | 0.69 |
| EnvP651 | 0.88 | 0.87 | 0.76 |
| VS | Stung Treng | Kratie | Tan Chau |
|---|---|---|---|
| J001L | 0.46 | 0.52 | 0.84 |
| J001U | 0.93 | 0.93 | 0.71 |
| J140 | 0.77 | 0.80 | 0.91 |
| J179 | 0.93 | 0.91 | 0.68 |
| Stung Treng | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE |
| (Best) | EnvP565A, 021B | 0/-1.84 | 3441/3341 | 26.52/26.79 | 0.94/0.92 |
| (Best) | EnvP021B | 0/-0.85 | 4222/3336 | 32.54/26.75 | 0.90/0.93 |
| (Worst) | EnvP565B, 651 | 0/-16.69 | 5577/5265 | 42.99/42.23 | 0.83/0.81 |
| (Worst) | EnvP565B | 0/26.43 | 6214/6614 | 47.89/53.04 | 0.79/0.70 |
| (Average) | - | 0/4.21 | 4071/4447 | 31.38/35.67 | 0.90/0.86 |
| (Average) | - | 0/0.30 | 5234/4747 | 40.34/38.07 | 0.84/0.84 |
| Kratie | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE |
| (Best) | EnvP021A, 565B | 0/-5.43 | 4116/4077 | 28.88/27.10 | 0.91/0.92 |
| (Best) | EnvP866 | 0/2.20 | 4373/4896 | 30.69/32.55 | 0.90/0.88 |
| (Worst) | EnvP565B, 651 | 0/-22.82 | 5716/7366 | 40.11/48.97 | 0.84/0.73 |
| (Worst) | EnvP565B | 0/-31.58 | 6361/8935 | 44.63/59.40 | 0.80/0.60 |
| (Average) | - | 0/-5.54 | 4511/5219 | 31.65/34.70 | 0.90/0.86 |
| (Average) | - | 0/-8.51 | 5593/5840 | 39.24/38.83 | 0.84/0.82 |
| Tan Chau | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE |
| (Best) | EnvP866, 952 | 0/-2.95 | 1075/1304 | 11.72/12.97 | 0.97/0.96 |
| (Best) | EnvP565A | 0/-12.38 | 2579/2642 | 28.11/26.27 | 0.84/0.83 |
| (Worst) | EnvP021B, 651 | 0/-12.26 | 3087/3571 | 33.65/35.51 | 0.77/0.70 |
| (Worst) | EnvP021B | 0/-11.26 | 3812/3700 | 41.56/36.79 | 0.65/0.68 |
| (Average) | - | 0/-6.82 | 2109/2206 | 22.99/21.93 | 0.88/0.87 |
| (Average) | - | 0/-6.85 | 3182/3305 | 34.69/32.86 | 0.75/0.74 |
| Stung Treng | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE |
| EnvP565A, 021B | –1.64 | 3737 | 31.78 | 0.88 | |
| EnvP021B | –3.29 | 5142 | 43.73 | 0.78 | |
| Kratie | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE |
| EnvP565A, 866 | 9.38 | 4058 | 32.43 | 0.88 | |
| EnvP866 | 12.12 | 5072 | 40.53 | 0.82 | |
| Tan Chau | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE |
| EnvP866, 952 | 0.61 | 1727 | 19.03 | 0.91 | |
| EnvP565A | –3.41 | 2328 | 25.65 | 0.83 |
| Stung Treng | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE | r |
| (Best) | J001U, 179 | 0.41/2.33 | 3752/2915 | 31.62/22.31 | 0.88/0.94 | 0.95/0.95 |
| J140,179 | 0.41/10.58 | 3779/3343 | 31.84/25.59 | 0.87/0.92 | 0.79/0.75 | |
| (Best) | J001U | 0.41/0.65 | 3354/2848 | 28.27/21.80 | 0.90/0.94 | - |
| J140 | 0.41/16.80 | 5501/6980 | 46.36/53.42 | 0.73/0.66 | - | |
| J179 | 0.41/2.84 | 4847/3926 | 40.84/30.05 | 0.79/0.89 | - | |
| Kratie | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE | r |
| J001U, 179 | 14.15/18.00 | 4788/5443 | 39.69/46.15 | 0.82/0.79 | 0.95/0.95 | |
| (Best) | J140,179 | 14.15/21.54 | 4497/5157 | 37.28/43.73 | 0.84/0.81 | 0.79/0.75 |
| (Best) | J001U | 14.15/19.03 | 4501/7281 | 37.31/61.74 | 0.84/0.62 | - |
| J140 | 14.15/26.25 | 5797/7202 | 48.05/61.07 | 0.73/0.63 | - | |
| J179 | 14.15/15.54 | 5840/6084 | 48.41/51.59 | 0.73/0.73 | - | |
| Tan Chau | Used VS | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE | r |
| (Best) | J001L, 179 | –0.99/–7.66 | 1529/2045 | 16.10/21.64 | 0.93/0.89 | 0.56/0.60 |
| J140,179 | –0.99/5.52 | 2536/3103 | 26.70/32.83 | 0.80/0.75 | 0.79/0.75 | |
| (Best) | J001L | –0.99/–10.15 | 1826/3066 | 19.23/32.43 | 0.90/0.75 | - |
| J140 | –0.99/6.16 | 2409/3311 | 25.37/35.02 | 0.82/0.71 | - | |
| J179 | –0.99/–1.23 | 4232/4064 | 44.57/42.99 | 0.45/0.57 | - |
| Number of VSs Used | Passes of the Added VSs | ME (%) | RMSE (m3s−1) | RRMSE (%) | NSE | Number of Effective Weights |
|---|---|---|---|---|---|---|
| 2 | EnvP866,952 | 0/–2.95 | 1075/1304 | 11.72/12.97 | 0.97/0.96 | 2 |
| 3 | 565A | 0/–3.98 | 1032/1237 | 11.25/12.30 | 0.97/0.96 | 3 |
| 4 | 021A | 0/–2.60 | 953/1270 | 10.38/12.62 | 0.98/0.96 | 3 |
| 5 | 021B | 0/–4.26 | 885/1268 | 9.65/12.61 | 0.98/0.96 | 3 |
| 6 | 651A | 0/–3.63 | 874/1307 | 9.52/12.99 | 0.98/0.96 | 3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Lee, H.; Chang, C.-H.; Bui, D.D.; Jayasinghe, S.; Basnayake, S.; Chishtie, F.; Hwang, E. Daily River Discharge Estimation Using Multi-Mission Radar Altimetry Data and Ensemble Learning Regression in the Lower Mekong River Basin. Remote Sens. 2019, 11, 2684. https://doi.org/10.3390/rs11222684
Kim D, Lee H, Chang C-H, Bui DD, Jayasinghe S, Basnayake S, Chishtie F, Hwang E. Daily River Discharge Estimation Using Multi-Mission Radar Altimetry Data and Ensemble Learning Regression in the Lower Mekong River Basin. Remote Sensing. 2019; 11(22):2684. https://doi.org/10.3390/rs11222684
Chicago/Turabian StyleKim, Donghwan, Hyongki Lee, Chi-Hung Chang, Duong Du Bui, Susantha Jayasinghe, Senaka Basnayake, Farrukh Chishtie, and Euiho Hwang. 2019. "Daily River Discharge Estimation Using Multi-Mission Radar Altimetry Data and Ensemble Learning Regression in the Lower Mekong River Basin" Remote Sensing 11, no. 22: 2684. https://doi.org/10.3390/rs11222684
APA StyleKim, D., Lee, H., Chang, C.-H., Bui, D. D., Jayasinghe, S., Basnayake, S., Chishtie, F., & Hwang, E. (2019). Daily River Discharge Estimation Using Multi-Mission Radar Altimetry Data and Ensemble Learning Regression in the Lower Mekong River Basin. Remote Sensing, 11(22), 2684. https://doi.org/10.3390/rs11222684