1. Introduction
Multitemporal image analysis represents a powerful source of information in Earth observation, especially in applications to environmental monitoring and disaster management. For example, monitoring the dynamics of desertification and urbanization can be accomplished by taking advantage of automatic change detection methods [
1,
2]. Analyzing the dramatic effects of flooding, fires, earthquakes and other natural disasters as immediately as possible also benefits from multitemporal image analysis techniques [
3]. Therefore, being able to jointly process a pair of images taken at different times plays a major role in this context.
Techniques allowing for the detection of changes from remotely-sensed data have been studied for the last two decades [
1]. The usage of either multispectral or radar data has been especially investigated. On the one hand, multispectral and hyperspectral data offer the possibility of operating with multidimensional feature spaces, often granting an effective discrimination between changed and unchanged areas [
2,
4,
5,
6,
7,
8]. On the other hand, this type of data is affected by such factors as illumination, atmospheric conditions and cloud cover. These factors critically influence both the performance and the operational applicability of a change detection technique. Conversely, synthetic aperture radar (SAR) imagery is not sensitive to those factors, allowing for the collection of data at nighttime or in conditions where the cloud cover would make it impossible for an optical sensor to gather any information on the Earth’s surface. However, SAR sensors allow one or a few data features (e.g., one amplitude or intensity with a single-polarization SAR or up to four polarimetric channels with a polarimetric SAR-PolSAR-instrument) to be acquired, and these measurements are affected by speckle, which acts as a multiplicative noise-like phenomenon [
9]. These issues often reduce the capability to discriminate changed and unchanged areas as compared to the case of multispectral and hyperspectral imagery [
3,
10]. Because of the speckle, unsupervised change detection with SAR intensity or amplitude data is often addressed by using image ratioing or log-ratioing. The former consists of dividing, pixel by pixel, the SAR intensity or amplitude collected on the first acquisition time by that acquired on the second acquisition time or vice versa [
9]. The latter also applies a logarithm to this pixel-wise ratio. Because of the strict monotonicity of the logarithm, these two multitemporal features essentially convey the same information for change detection purposes. The resulting ratio or log-ratio image is processed to determine whether a pixel represents a changed or an unchanged area on the ground. Approaches alternative to image ratioing include the computation of metrics between local pixel intensity distributions at the two acquisition dates (e.g., the Kullback–Leibler distance) [
11,
12]. On the contrary, while ratioing and log-ratioing are typical choices for change detection with SAR data, other feature extraction strategies are generally used for change detection with multi- and hyper-spectral imagery, because of the different data and noise statistics. These strategies include image differencing [
5], change vector analysis [
2], the Reed–Xiaoli (RX) detector and its extensions [
6,
7] and spectrally-segmented linear predictors [
8], among others.
In this framework, the possibility of developing techniques that exploit SAR imagery at multiple spatial resolutions presents a great potential. This potential is also enforced by current missions, such as COSMO-SkyMed, TerraSAR-X, RADARSAT-2, PALSAR-2, Kompsat-5 and Sentinel-1, which provide single- or multi-polarimetric images with multiple spatial resolutions and possibly short revisit times. Taking benefit from the data of current and future missions requires exploiting all the information they bring, hence their multiple spatial resolutions, polarizations or frequencies. In this paper, a novel unsupervised method for the identification of changes in multiresolution and multimodal SAR intensity images is proposed.
Indeed, the current state of the art enumerates only a few examples of approaches addressing the change detection problem with multiresolution/multiscale and multimodal SAR data. A research line that has been explored in this perspective is the joint exploitation of unsupervised change detection techniques together with the application of wavelet transformations [
13,
14]. Wavelet transforms allow decomposing an input image to obtain a pyramid of new images at progressively coarser spatial scales. Change detection is then applied to this pyramid, either hierarchically, from coarser to finer scales, or jointly, in order to fuse the information captured at the considered scales. However, this is different from the task addressed in this paper. While here the problem of change detection from an input pair of multiresolution images is addressed, techniques based on wavelet decompositions usually take single-resolution imagery as input data and generate multiscale data as an internal process for feature extraction purposes.
In 2005, Bovolo and Bruzzone [
15] proposed an approach based on an undecimated stationary wavelet transform (SWT) decomposing the log-ratio image into a set of scale-dependent images characterized by different trade-offs between speckle reduction and preservation of geometrical details. The final change map was obtained through adaptive scale-driven fusion algorithms properly exploiting the wavelet transforms at the different scales. In 2010, Moser and Serpico proposed a method [
16] for unsupervised change detection integrating decimated wavelet transforms, Markov random fields (MRFs) for contextual modeling and generalized Gaussian models. The method was evaluated on very high resolution COSMO-SkyMed data. Celik and Ma proposed a method [
17] exploiting the robustness against noise of the SWT to obtain a multiscale representation of the ratio image. These multiscale data were segmented with a region-based active contour model for discriminating changed and unchanged regions. Another example was given by [
18], where Chabira et al. proposed an unsupervised process for the identification of changes in multitemporal and multichannel SAR images not requiring speckle filtering. The method was based on SWT and linear discriminant analysis. On the one hand, these wavelet-based methods extract multiscale information through the related wavelet decompositions, thus intrinsically introducing contextual information into the change detection process and favoring the preservation of image structures at different spatial scales. On the other hand, all of these techniques were developed for the case of single-resolution and single-modality input SAR data. Hence, they are not applicable per se to input data collected at multiple spatial resolutions, unless case-specific reformulations are introduced.
Regarding approaches not based on wavelet decompositions, Moser et al. presented a method [
19] using MRFs for spatial-contextual modeling and graph cuts for the optimization of a suitable energy function defined with the goal of discriminating changed and unchanged areas in multiresolution SAR imagery. In 2014, Dellinger et al. proposed a feature-based approach [
20] to detect changes between a pair of either optical or radar images. This method was based on the scale-invariant feature transform (SIFT) and on an a contrario approach. In 2015, the same authors presented the SAR-SIFT algorithm [
21], which extended the previous approach to SAR images by introducing a speckle-robust definition of the gradient and by taking into consideration both the detection of keypoints and the computation of local descriptors. However, while [
19] addressed the same change detection problem as the present paper, the previous works based on SIFT follow a different approach. They rely on the extraction of local features useful for registering the multiresolution data sources; then, change detection is applied to the registered data and not to input images at different resolutions.
While the literature of change detection algorithms for multiresolution SAR data is scarce, significant effort has been put on the development of change detection methods for multichannel SAR images collected by a PolSAR instrument or at multiple radar frequencies. Methods based on the representation of the backscattered signal through the complex-valued polarimetric sample covariance matrix are common in this framework. On the one hand, this representation is comprehensive in the sense that it characterizes all properties of the backscattered SAR return in terms of both amplitude and phase. On the other hand, in this case as well, the related methods focus on single-resolution data and do not address change detection with SAR imagery associated with multiple spatial resolutions. Furthermore, most of these techniques incorporate local spatial information associated with a neighborhood of each pixel, but do not make use of multiscale information within the change detection process. In [
22], Erten et al. proposed a method based on the analytical computation of the mutual information, assumed to be maximal where two images taken at different times were identical. The analytical formulation was derived from the joint density function of multitemporal multichannel images based on their second-order statistics. In 2013, Marino et al. [
23] proposed a test for the detection of changes in the internal structure of the covariance matrix. In both [
22,
23], it was assumed that the covariance matrices associated with each SAR pixel followed complex Wishart distributions and that the input data were at the same resolution. In [
24], Liu et al. presented an unsupervised change detection method using heterogeneous clutter models and whose similarity measure was not based on the Wishart distribution. Moreover, in [
25], a patch-based change detection method for polarimetric SAR data was proposed, while in [
26], Akbari et al. presented an unsupervised method based on the relaxed Wishart distribution for textured change detection analysis. Nielsen et al. proposed a method extending the generalized likelihood ratio test to multitemporal and multifrequency data [
27]. In 2016, Akbari et al. proposed a test statistic working with multilook covariance matrix data, whose underlying model was assumed to be the scaled complex Wishart distribution and where the similarity between the covariance matrices was measured through the complex-kind Hotelling–Lawley trace statistic [
28].
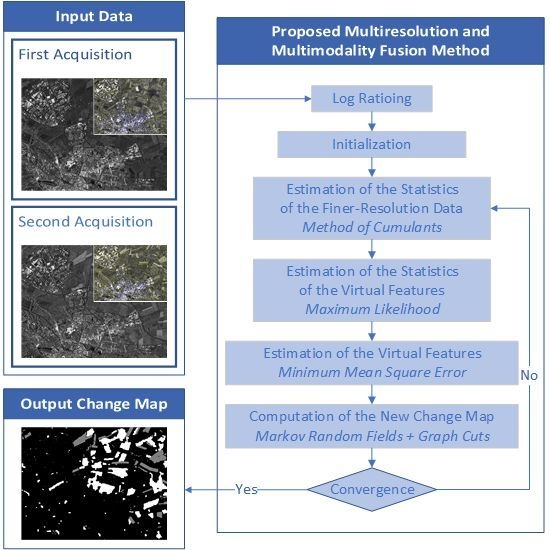
This paper presents a novel algorithm for unsupervised change detection from a multitemporal pair of multiresolution and multimodality SAR images. We assume that the input images are collected over the same geographical area at multiple spatial resolutions at both observation dates and that, for each considered resolution, one or several SAR amplitude channels associated with different modalities (e.g., different polarizations or different frequencies) are acquired. The spatial resolutions and the acquisition modalities are assumed to be the same at both dates, an assumption that is naturally satisfied if the same spaceborne sensors are used for both observations. Log-ratioing is applied to the multitemporal SAR amplitude data of all resolutions and modalities.
The proposed algorithm methodologically comprises MRF modeling [
29,
30], graph cut minimization [
31,
32], linear mixtures [
33,
34], generalized Gaussian distributions [
35], Gram–Charlier series expansions [
36], maximum likelihood (ML) and minimum mean squared error (MMSE) estimation [
37]. It receives, as input, the SAR data collected with all modalities and resolutions and outputs a single change map that takes into account the information gathered by all such sources. The output change map is at the finest among the spatial resolutions of the input multitemporal imagery. This multiresolution and multimodality fusion task is addressed, first, by parametrically modeling the distribution of the data at the different resolutions and by estimating, in the MMSE sense, the “virtual” images that would have been collected in case all modalities worked at the finest resolution. Probability density function (PDF) estimation is accomplished by a case-specific novel approach that combines generalized Gaussians, the Gram–Charlier expansion and a linear mixture model to formulate the ML rule consistently with the multiresolution structure of the input data. This choice makes it possible to benefit from the good properties of ML estimators, such as consistency and asymptotic efficiency, which are well known from the Bayesian estimation theory [
38]. Then, the virtual and the finest resolution images are fused in a Markovian framework by defining a novel energy function that is minimized through graph cuts. The MRF formalization based on virtual features is partly inspired by [
33,
34], in which a similar idea was used to address the classification of optical multispectral images based on Gaussian class-conditional distributions.
The main novel contributions of this paper include: (i) the development of an unsupervised change detection method for the challenging case of an input pair of multiresolution and multimodality SAR images; (ii) the generalization of the MRF modeling with virtual features in [
33,
34] from the case of multispectral image classification to that of SAR change detection, and the corresponding methodological extension through generalized Gaussian and Gram–Charlier probabilistic models; and (iii) the development of a case-specific ML parameter estimation algorithm for these non-Gaussian models, when combined with the considered multiresolution data structure. We recall that we presented a first preliminary formulation of this approach in the conference paper [
19]. On the one hand, the present work and the one in [
19] share the idea of addressing multiresolution change detection through virtual features. On the other hand, the method developed here is based on a complete redefinition of the related probabilistic models and parameter estimation strategies (see also
Section 3).
We assume that the temporal pair of input images is registered. For the sake of clarity, we shall methodologically describe the proposed technique in the case of a pair of images collected at two distinct spatial resolutions with a single-channel acquisition at each resolution. An example may be the joint use of higher resolution COSMO-SkyMed stripmap data and of lower resolution COSMO-SkyMed ScanSAR data. The extension to other multiresolution SAR data configurations, possibly involving more than two resolution levels and/or multiple polarizations or multiple frequencies for each level, is straightforward and is discussed in a later section.
This paper is organized as follows. The developed methodology is presented in
Section 2. First,
Section 2.1 proposes the mathematical formulation of the algorithm and presents the required assumptions. Then, the techniques developed for estimating the PDFs of the input and virtual data are reported in
Section 2.2, and the estimation of the virtual features is described in
Section 2.3, while energy minimization is discussed in
Section 2.4. Finally, the extension of the proposed methodology to the general case of more than two resolutions and multiple channels is presented in
Section 2.5.
Section 3 and
Section 4 report the experimental results obtained with COSMO-SkyMed images. The dataset used for experiments is described, experimental results and comparisons reported and an in-depth discussion of the change detection performances presented. Conclusions are drawn in
Section 5.
4. Discussion
A visual analysis of the results obtained by applying the developed method to the available dataset suggests the regular behavior of the related iterative procedure (see
Figure 4). Although the initialization map exhibited a large number of false and missed alarms and was spatially very irregular, the proposed method allowed a substantial improvement in spatial smoothness to be achieved on the first iteration already. Moreover, the method converged to the visually accurate configuration in
Figure 4c, in which the changed areas were well identified. In particular, the visual analysis of the maps pointed out the effectiveness of the contextual component brought about by the MRF model and by the proposed multiresolution formulation, which spatially regularized the final result as compared to the initialization and intermediate configuration outputs. The use of spatial information was especially relevant because of the high resolution of the input stripmap data.
To discuss more in detail the behavior of the proposed method along its iterations, we plot in
Figure 10 the detection probability, the probability of false alarm and the error probability, estimated again using the test set, as functions of the iteration counter. Quite a fast convergence behavior can be noted for all three performance measures. We recall that, within each iteration of the method, the convergence of the energy minimization process is ensured by the graph cut theory. The plot in
Figure 10, together with the aforementioned examples of change maps in
Figure 4 allow the regular convergence behavior of the method to be appreciated along the whole sequence of iterations as well.
A slight blocking effect at the borders of the change class indicated in white (decreased backscattering) can be noted in the change map of the proposed technique in
Figure 4c, whereas no such artifact appears at the border of the other change class. Indeed, the changes associated with increased backscattering are apparent in both the input stripmap and polarimetric COSMO-SkyMed pairs, whereas those associated with decreased backscattering can be appreciated almost only in the polarimetric pair. The proposed method identified the former change based on the input data at both resolutions, but could benefit from essentially only the coarser resolution polarimetric component to detect the latter change on the finer resolution lattice. This difference explains the slight blocky artifacts at the edges of the changes that were detected only through the coarser resolution input and not at the edges of the other change class. On the one hand, the blocky effect is visually quite limited. On the other hand, this result overall suggests the capability of the proposed method to fuse multimodality data to map, on the finer resolution lattice, all changes that are present in the input multiresolution dataset.
In the proposed technique, the multiresolution structure of this input dataset is modeled using the virtual features. In the case of the considered dataset, these features are supposed to represent how the polarimetric log-ratios would look like if they could be acquired at the finer resolution. However, as the polarimetric data are collected only at the coarser resolution, no ground truth is available to evaluate the accuracy of the estimation of the virtual features. Hence, we performed a visual comparison between the virtual features estimated at the convergence of the proposed method and the log-ratios of the polarimetric data upsampled to the stripmap lattice (see
Figure 11a,b, in which the RGB false color displays use
and
).
Figure 11c,d also zoom in on a detail of these false color displays, and
Figure 11e shows the corresponding detail of the change map. The visual comparison between the log-ratio of the upsampled polarimetric data and the virtual features points out that the spatial structure of the change map affects the latter but obviously not the former. This is consistent with the iterative formulation of the proposed method. In each iteration, the current change map is used to update the virtual features through MMSE. Indeed, the virtual features aim not only at representing the coarser resolution log-ratio data on the finer resolution lattice but also at taking explicitly into account the discrimination among the change classes. On the contrary, the upsampling of the polarimetric data
per se does not address class discrimination. Accordingly and as shown in
Table 1, changed and unchanged areas were discriminated more effectively when the virtual features were used than when the polarimetric data were simply upsampled. Moreover, the virtual features, as compared to the polarimetric data, did not exhibit significant spatial artifacts on the finer resolution lattice (see
Figure 11a,b).
The difficulty of detecting one of the two types of change using only the stripmap pair (see the map in
Figure 7a) is also documented by
Figure 12, which shows the PDF models estimated at the convergence of the proposed method. The PDFs of the stripmap log-ratio and of the virtual features conditioned to the three classes are shown. As it can be easily seen, the PDF of the stripmap log-ratio conditioned to the “no-change” class is largely overlapping to its PDF conditioned to “change due to decreased backscattering”. Substantial overlap, although less strong than in the case of the stripmap log-ratio, can be noted among the estimated class-conditional PDFs of the virtual features as well. Nevertheless, the change detection results in
Figure 4c and
Table 1 confirm the capability of the proposed method to benefit from these pixel-wise class-conditional contributions, from the spatial context, and from the multiresolution structure of the dataset to discriminate the three classes with high test-set and visual accuracy.
Moreover, we note that the rather accurate performance obtained by the previous method in [
10] and especially its improvement as compared to the use of single-modality data (see
Table 1) confirmed the data-fusion capability of MRFs and the effectiveness of the algorithm in [
10] in taking advantage of the two input data sources. However, more accurate results were obtained by the proposed fusion algorithm than by this previous technique. This comment is supported both qualitatively by the visual analysis of the change maps (see
Figure 4c and
Figure 8) and quantitatively by the performance measures on the test set (see
Table 1). Owing to the definition of a multiresolution and multimodality energy function and of an explicit model for the relation among distinct spatial resolutions, the proposed technique allowed for a more effective fusion as compared to the case where the input data were resampled on the same lattice and fused through a multimodality technique, regardless of their original spatial resolutions.
Figure 4c and
Figure 9 also suggest an improvement of the proposed method, as compared to the adapted formulation of FDL-ARS, in taking benefit of the input multiresolution data while preserving the geometric properties of the scene. Accurate results were achieved by FDL-ARS on the considered dataset, especially when this method was used to separately detect the two types of change by applying a double threshold to the log-ratio (see
Table 1). When a single-threshold was applied to the normalized log-ratio, the application of this technique was less effective because of the increased confusion among the classes in the normalized log-ratio domain. However, more accurate results were obtained on the test set by the proposed algorithm. Furthermore, a visual analysis of the resulting change maps points out the improvements brought about by the developed technique in terms of spatial homogeneity. These results suggest a higher effectiveness of the proposed Markovian framework than of the combination of SWT and pooling in integrating multiresolution and contextual information into the change detection process. This improvement is especially relevant in the case of the change class due to decreased backscattering, whose detection could benefit of only the wavelet transforms deriving from the polarimetric data and not of those deriving from the stripmap data (see
Table 1).
Finally, with regard to the comparison with the LRT approach in [
27], the ROC curves in
Figure 5 and the location of the
point corresponding to the proposed method point out the improved performances of the latter on the test set, both when the LRT in [
27] was applied to the original data and when it was used after despeckling. We recall that the method in [
27] is aimed at detecting all types of change together as a whole. The results in
Figure 5 are interpreted as due to a more accurate characterization provided by the proposed approach for the multiresolution and spatial information in the input dataset. In the present application of the LRT in [
27], the multiresolution structure of the data and the spatial context are taken into account through a simple upsampling and through despeckling, respectively. On the contrary, the proposed method explicitly models both of these aspects through linear mixtures, virtual features and MRFs.
5. Conclusions
A novel multiresolution change detection method for SAR imagery has been proposed. The method is aimed at processing temporal pairs of SAR images, each collected at different spatial resolutions and possibly with different acquisition modalities. From an application-oriented viewpoint, the method takes advantage of the multiresolution and multimodality acquisition capabilities of current satellite SAR missions. From a methodological perspective, given a pair of multiresolution and multimodal SAR images, the method iteratively computes a change map at the finest resolution available in the input dataset by combining MRF models, Bayesian estimation, generalized Gaussian distributions, Gram–Charlier approximations and graph cuts. The coarser resolution channels are iteratively used, together with the current change map, to estimate a set of virtual features representing the images that would have been collected in case all the sensors worked at the finest resolution.
The method has been experimentally evaluated with a multitemporal pair of multiresolution COSMO-SkyMed images combining finer resolution stripmap data and coarser resolution polarimetric data. A regular convergence behavior and very high accuracy on the test set were obtained by the proposed technique. These results suggested the capability of the method to fuse multisource and multiresolution data for change detection purposes and the effectiveness of the probabilistic models adopted for the SAR observations and the virtual features.
The performances of the proposed method were compared to those obtained by using only the stripmap pair or the polarimetric pair individually, by replacing the virtual features by a simple upsampling of the polarimetric data, by applying the single-resolution Markovian algorithm in [
10] and a case-specific formulation of the polarimetric LRT in [
27] after resampling all data at the finest resolution and by adapting the wavelet-based technique in [
15] to the considered multiresolution setup. The results of these comparisons were analyzed in terms of detection accuracies and false alarm rates on the test set and of the visual quality of the change maps. The analysis pointed out that more accurate performances were obtained by the proposed method, as compared both to operating with the data at the two individual resolutions and modalities and to using a data upsampling instead of the estimation of virtual features. The previous algorithms in [
10,
15] also obtained accurate results on the test set, although with lower detection accuracies and higher false-alarm rates than the developed technique. For the algorithm in [
27], ROC curves were estimated using the test set, with and without the preliminary application of despeckling. The resulting ROC plot pointed out a significant performance improvement of the proposed technique. On the one hand, these results confirm the effectiveness of the developed method as compared to previous unsupervised SAR change detection algorithms based on various methodological concepts (MRF, wavelets, polarimetric LRT). On the other hand, all these previous methods were originally developed for the case of single-resolution input imagery; hence, their applications to multiresolution data required case-specific algorithmic adaptations (e.g., through upsampling or ad hoc pooling operations).
In general, these results are consistent with the well-known data fusion capabilities of MRF models and with their potential for change detection with remote sensing data. More specifically, the results suggest that the proposed method is able to map, on the pixel lattice at the finest resolution observed, the various types of change in the dataset, even though one of these types of change was essentially not discriminated at all in the stripmap pair. If a type of change is identified only owing to a coarser resolution component of the dataset, then the borders of the corresponding detected change regions may be affected by a blocky effect, although slightly. A possible future extension of the method, aimed at reducing this slight artifact, could make use of a spatial MRF model with different smoothing penalties as a function of the change labels.
Further relevant developments may also include extending the proposed method through conditional random fields (CRF) [
53], to benefit from a possibly more general formulation of the contextual energy term, or incorporating superpixels extracted by a SAR image segmentation method [
54,
55] into the MRF/CRF. The latter extension would further improve the capabilities of the method to provide change maps characterized by an efficient use of the spatial information in terms not only of local context and multiresolution structure, but also of homogeneous regions [
40,
56]. Finally, it would be of particular interest to exploit the fusion capabilities of the developed method by incorporating not only multiresolution and multimodality SAR, but also multispectral optical imagery through further appropriate energy contributions [
57] or hierarchical graphs [
58].















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}