
Multi-Objective Scheduling Method for Integrated Energy System Containing CCS+P2G System Using Q-Learning Adaptive Mutation Black-Winged Kite Algorithm


Abstract
1. Introduction
1.1. Literature Review
1.2. Research Gap
1.3. Research Contribution
- (1)
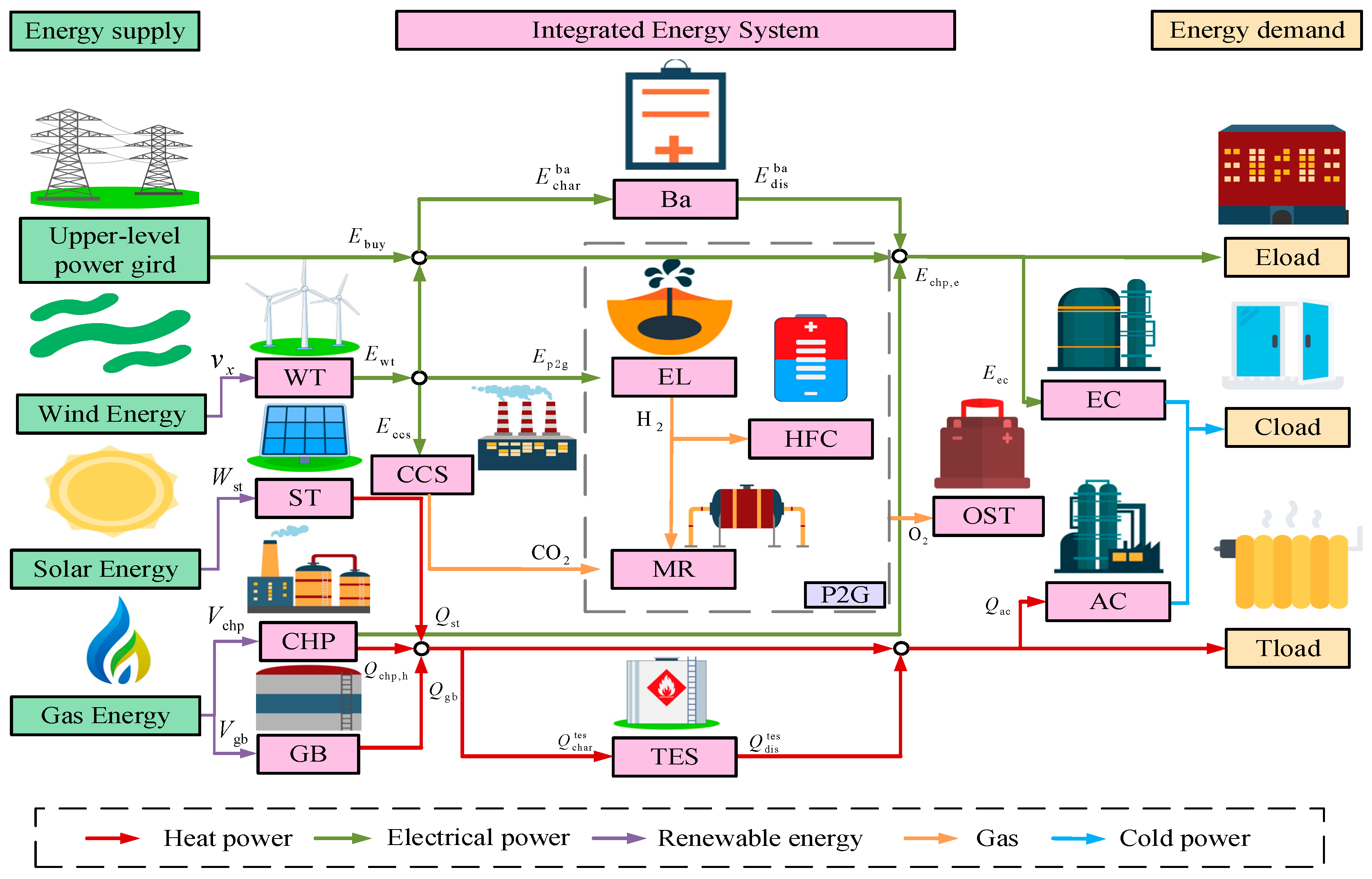
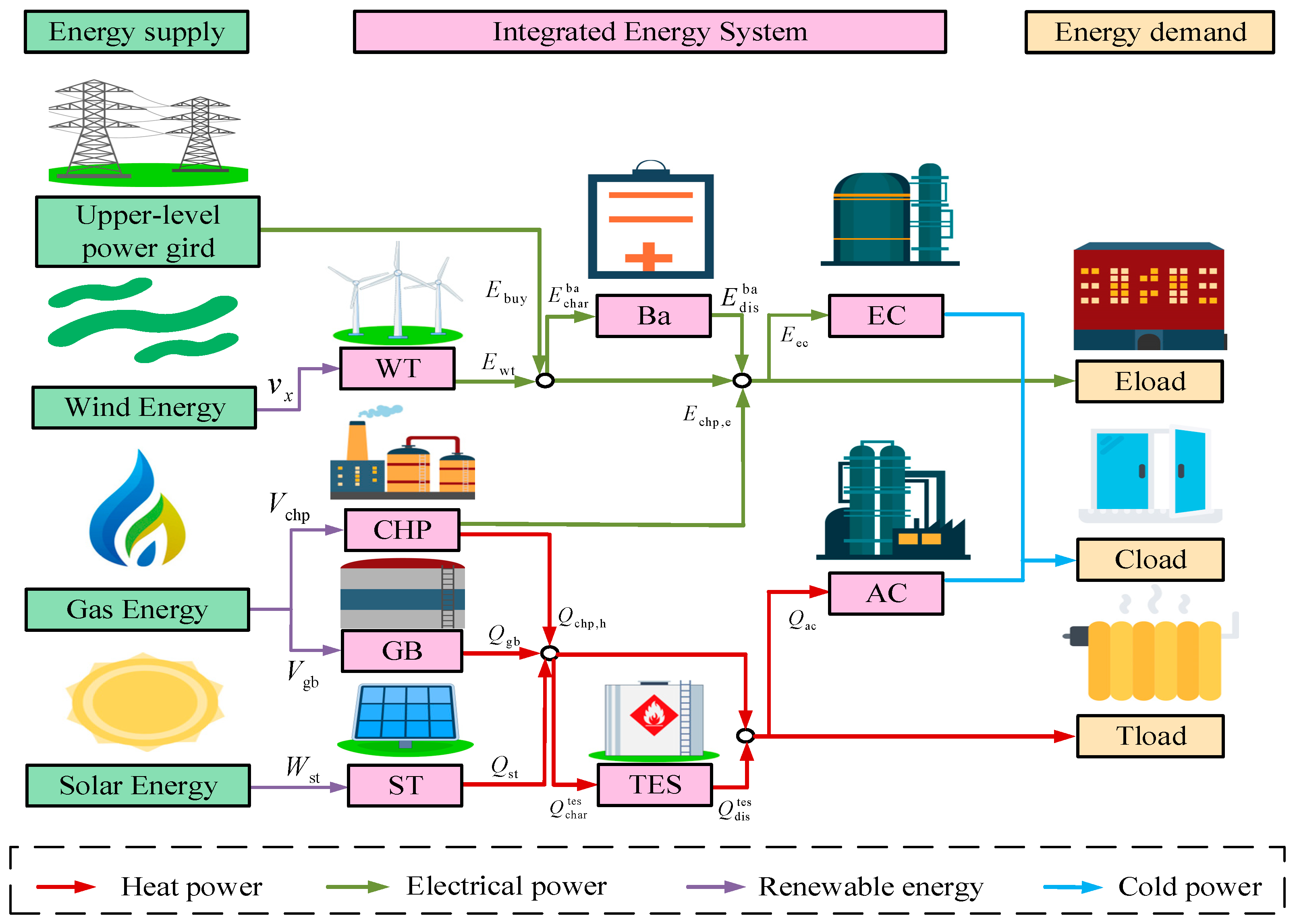
- A multi-objective optimal scheduling model for the IES was established, aiming to minimize economic cost and CO2 emissions while maximizing energy efficiency. The IES integrates multiple energy conversion and storage devices, involving technologies such as power generation, energy storage, gas production, and CCS. It can efficiently satisfy the combined load demand for power, heat, and cooling.
- (2)
- MOBKA-QL integrates five mutation strategies and employs Q-learning for adaptive selection during iterations, enabling environment-aware and self-learning capabilities. The original BKA is extended to handle multi-objective optimization. In this framework, solution sets are first evaluated by MOVI, then ranked based on crowding distance, and finally, the optimal Pareto solution is selected using TOPSIS, making it well-suited for IES scheduling.
- (3)
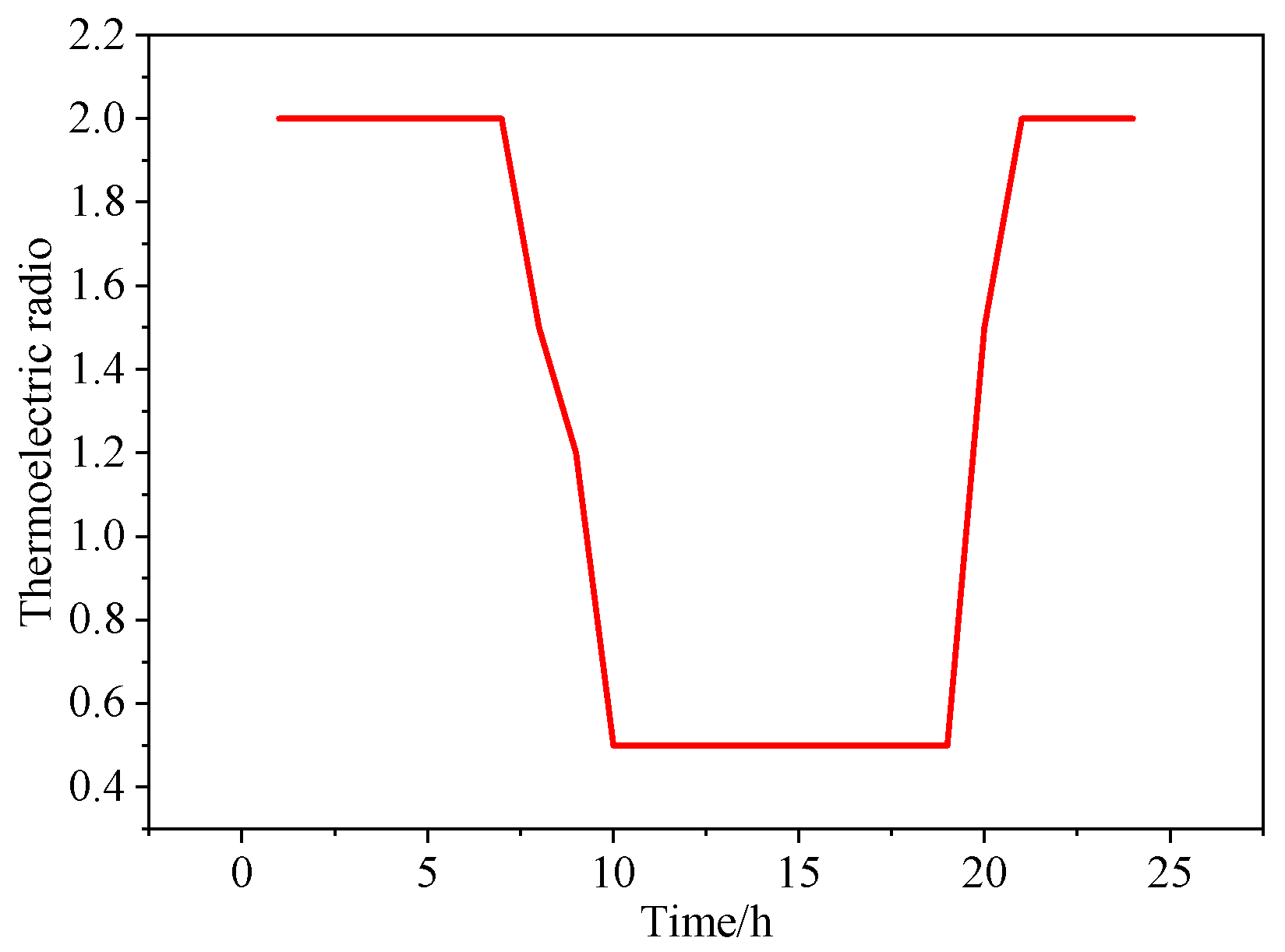
- The operation of CHP adopts an adjustable heat-to-power ratio strategy, which combines real-time data on demand-side loads and renewable energy to dynamically adjust energy supply. Using the same algorithm and model, we compared this strategy with a constant heat-to-power ratio strategy in a test, which verified the superiority of the former in terms of economy, environment, and energy.
2. Integrated Energy System Modeling
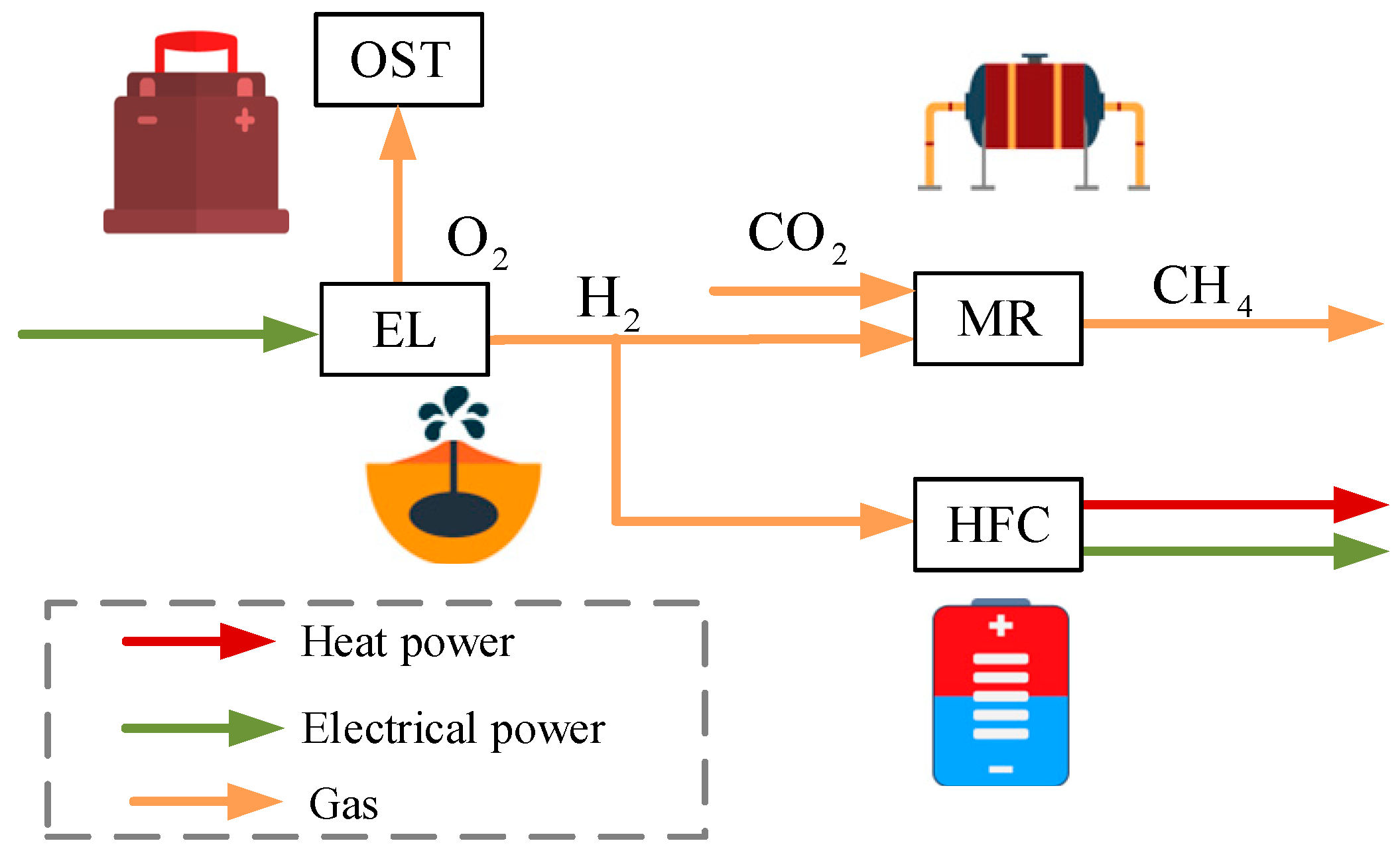
2.1. Two-Stage P2G Operational Process
- (1)
- Electrolytic cell
- (2)
- Methane reactor
- (3)
- Hydrogen fuel cell
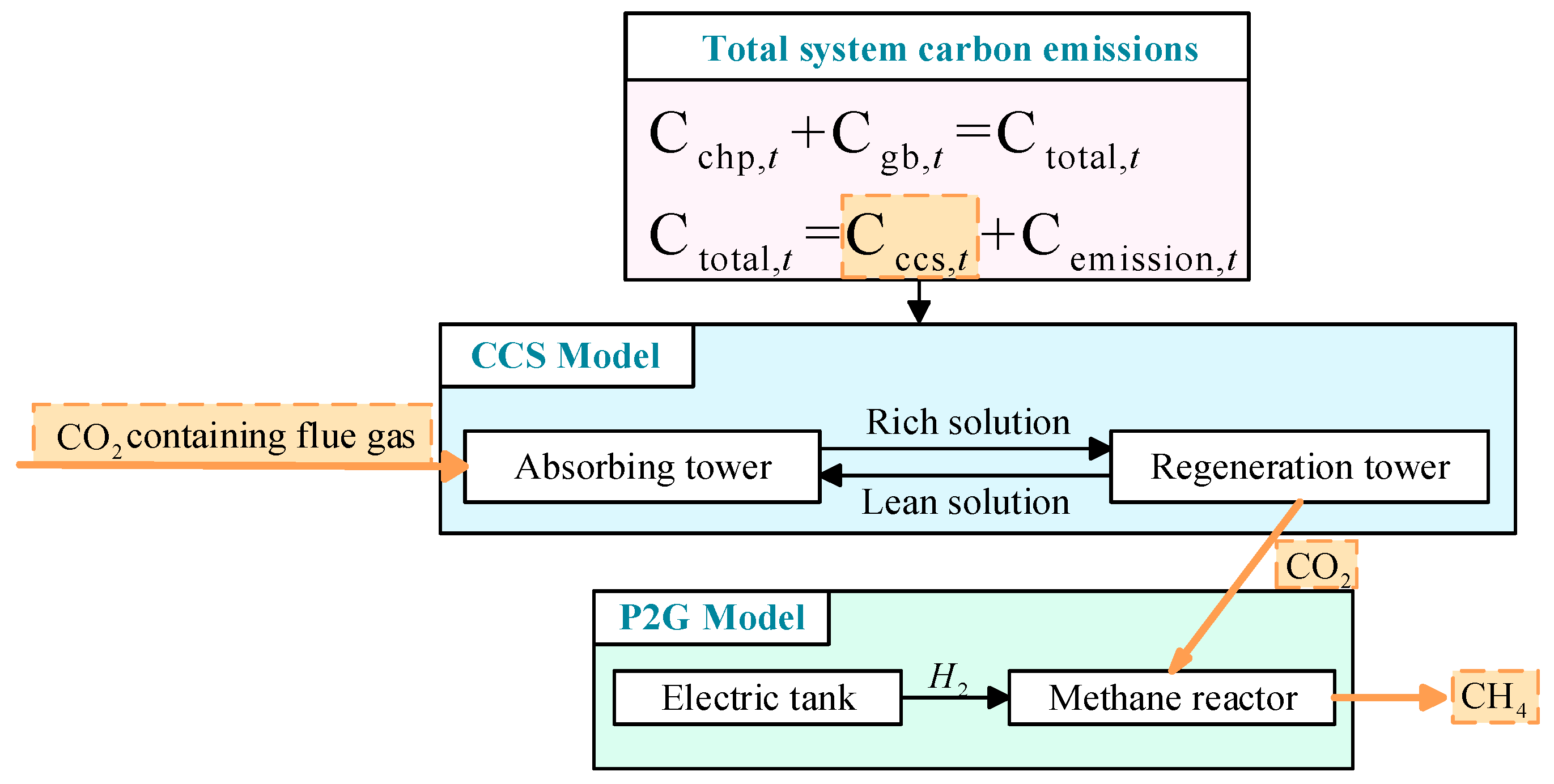
2.2. CCS+P2G System
2.3. Adjustable Thermoelectric Ratio for CHP
2.4. Integrated Energy System Equipment
- (1)
- Wind turbine
- (2)
- Solar thermal collector
- (3)
- Gas boiler
- (4)
- Refrigeration equipment
- (5)
- Battery
- (6)
- Thermal energy storage tank
- (7)
- Oxygen storage tank
3. Multi-Objective Optimization Method for IES Based on MOBKA-QL
3.1. Decision Variables
3.2. Objective Function
- (1)
- Economic dispatch: Economic cost minimization
- (2)
- Energy dispatch: Energy efficiency maximizing
- (3)
- Low-carbon dispatch: Carbon dioxide emissions minimizing
3.3. Constraints
- (1)
- Output constraints for devices in the system
- (2)
- Electricity purchase constraints
- (3)
- Energy storage device constraints
- (4)
- The constraints of CCS, P2G, and CHP equipment are expressed in Equations (1)–(3) and (6).
- (5)
- Cold power balance constraints
- (6)
- Electric power balance constraints
- (7)
- Thermal power balance constraints
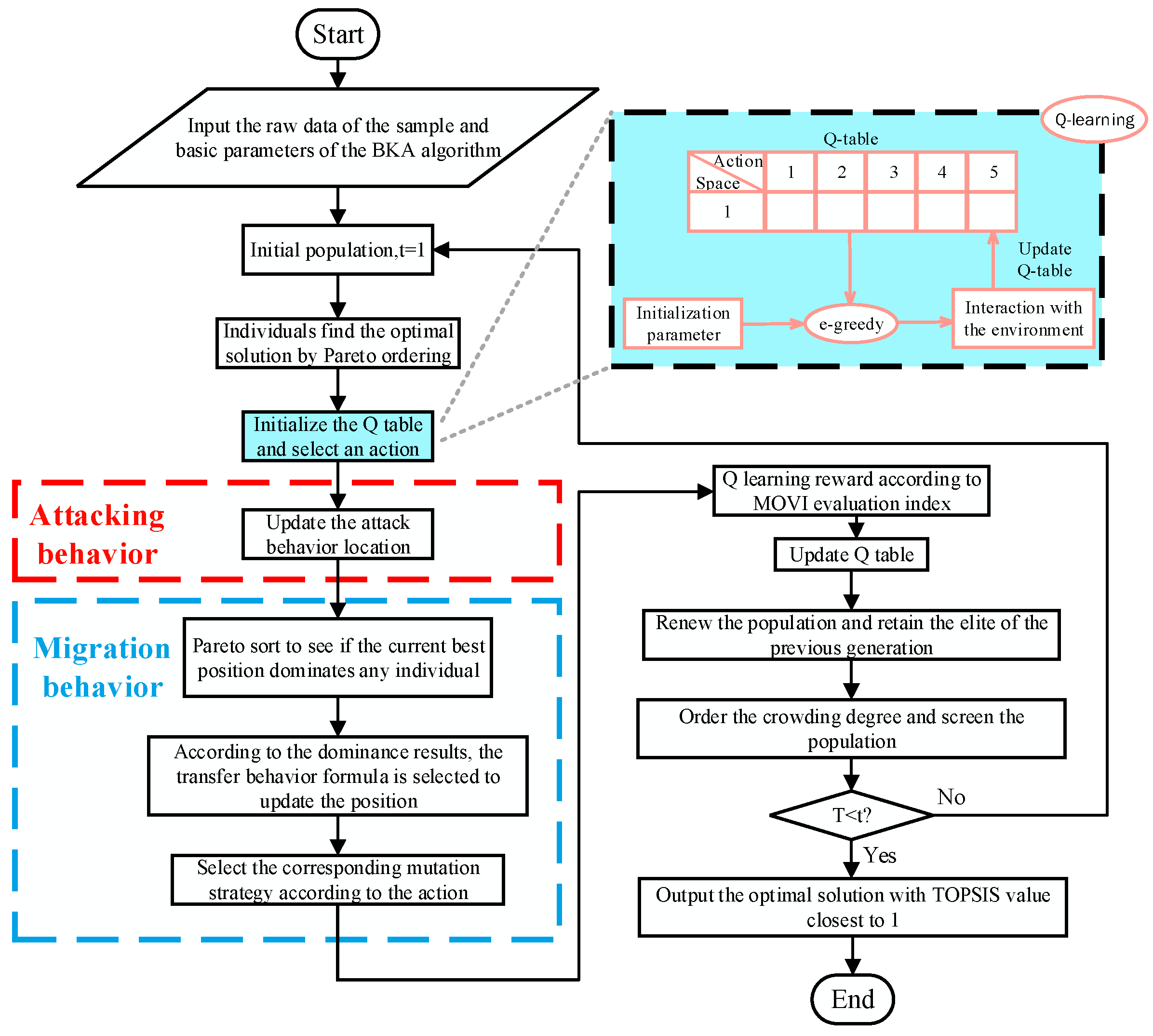
3.4. Improved Multi-Objective Black-Winged Kite Algorithm with Adaptive Mutation Based on Q-Learning
3.4.1. BKA
- (1)
- Initialization phase
- (2)
- Attacking behavior
- (3)
- Migration behaviorwhere and represent the next and previous sessions of the ith black-winged kite in the jth dimension, respectively; and denote the position of the ith black-winged kite in the jth dimension in the tth and (t + 1)th iteration, respectively; r indicates a random number with a value ranging from 0 to 1; p signifies the parameter controlling the behavior of different attacks; T refers to the total number of iterations; t stands for the number of iterations that have been completed so far; describes the leading scorer of the jth dimensional black-winged kite in the tth iteration so far; expresses the jth dimensional current position obtained by any black-winged kite in the tth iteration; embodies the fitness value of any black-winged kite in the jth dimensional random position in the tth iteration; and C(0, 1) symbolizes the Cauchy mutation defined as in Equation (33).
3.4.2. Selection of Multiple Mutation Strategies for MOBKA-QL
3.4.3. Implementation of Adaptive Mutation Strategies Based on Q-Learning
- (1)
- State
- (2)
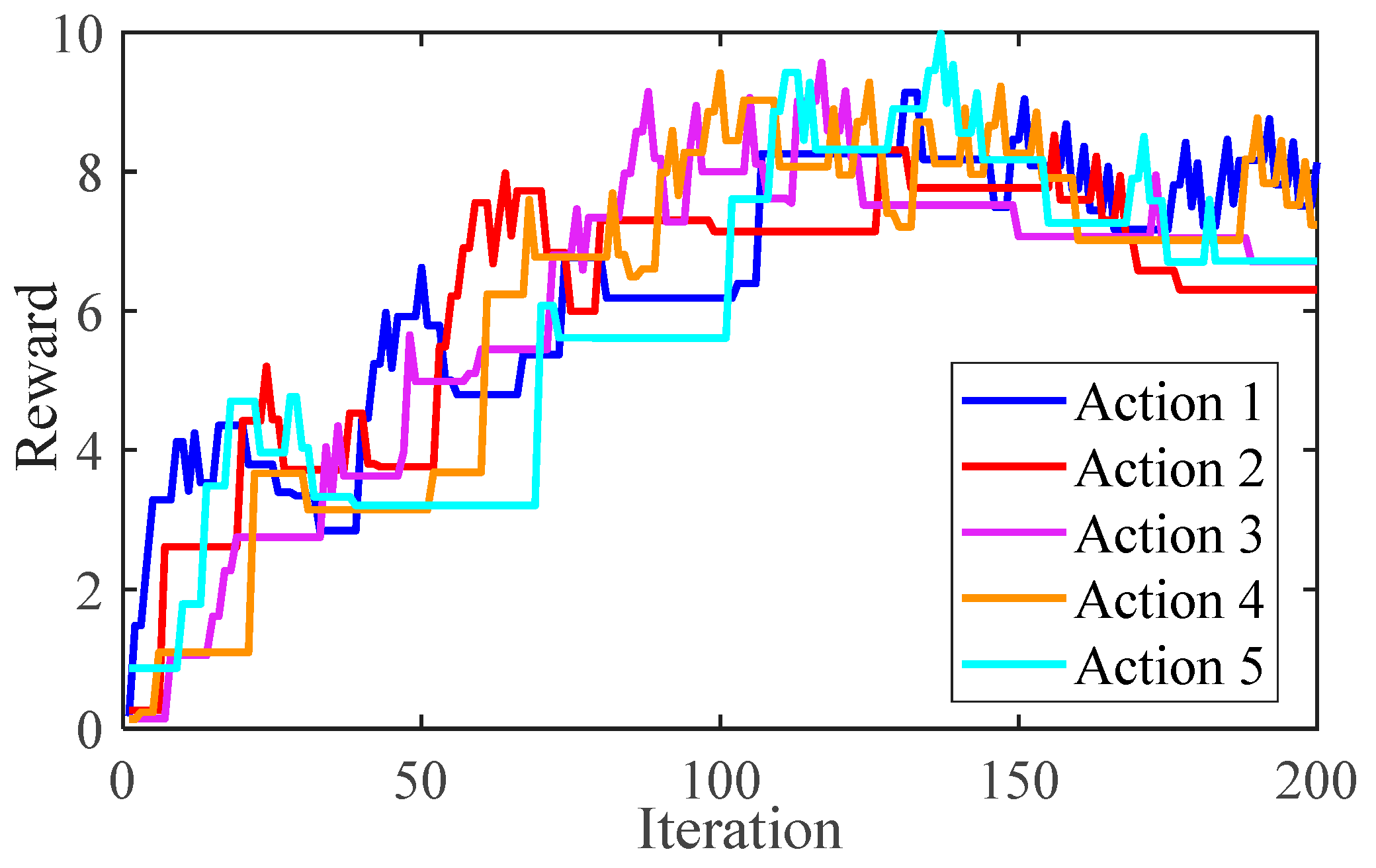
- Action
- (3)
- Award
- (4)
- Epsilon calculation
3.4.4. Multi-Objective Optimization of the MOBKA-QL Algorithm
3.4.5. Optimization Result Selection for the MOBKA-QL Algorithm
3.4.6. MOBKA-QL Algorithm Steps
3.4.7. Benchmark Testing and Result Analysis of the MOBKA-QL Algorithm
4. Simulation and Analysis
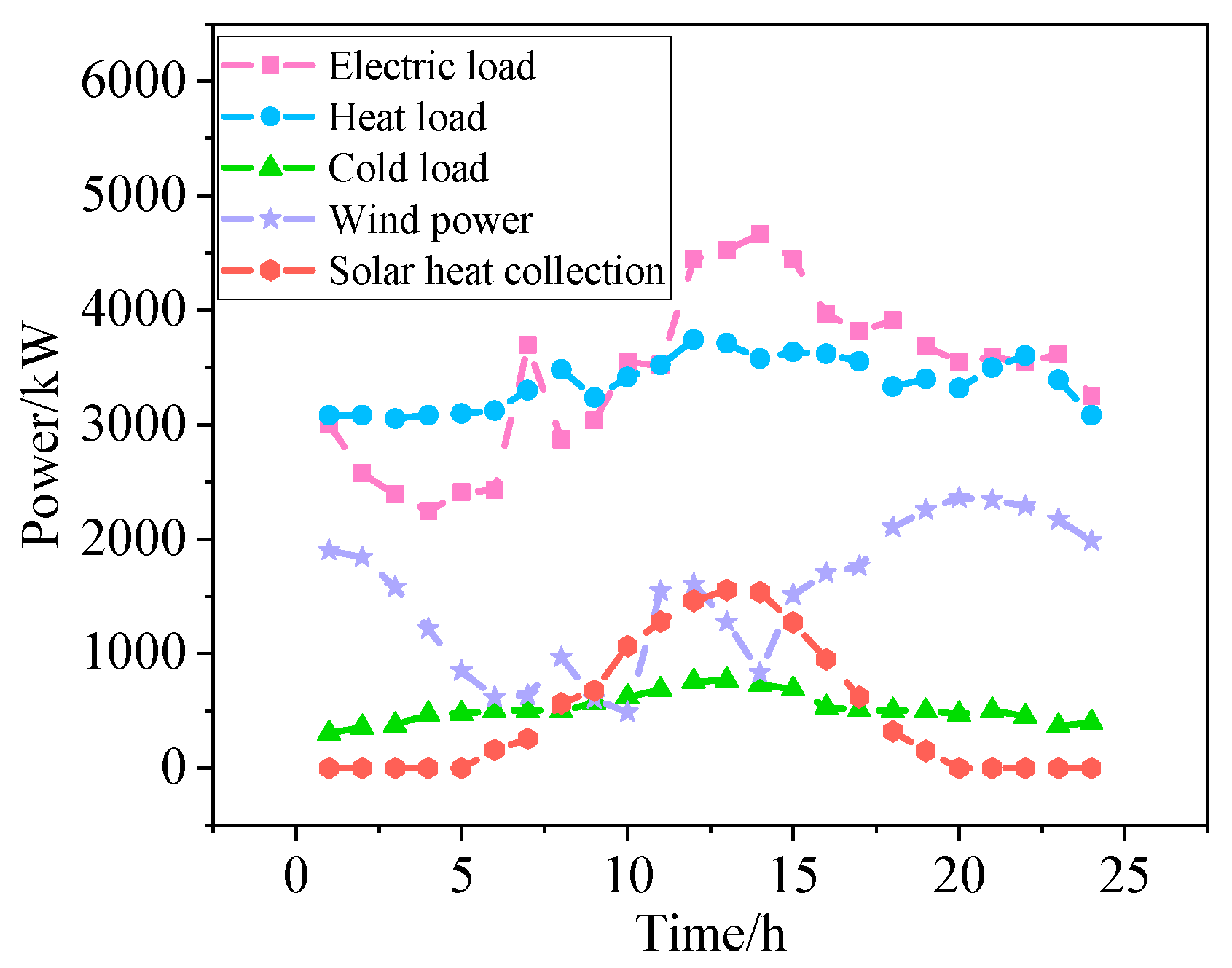
4.1. Original Data
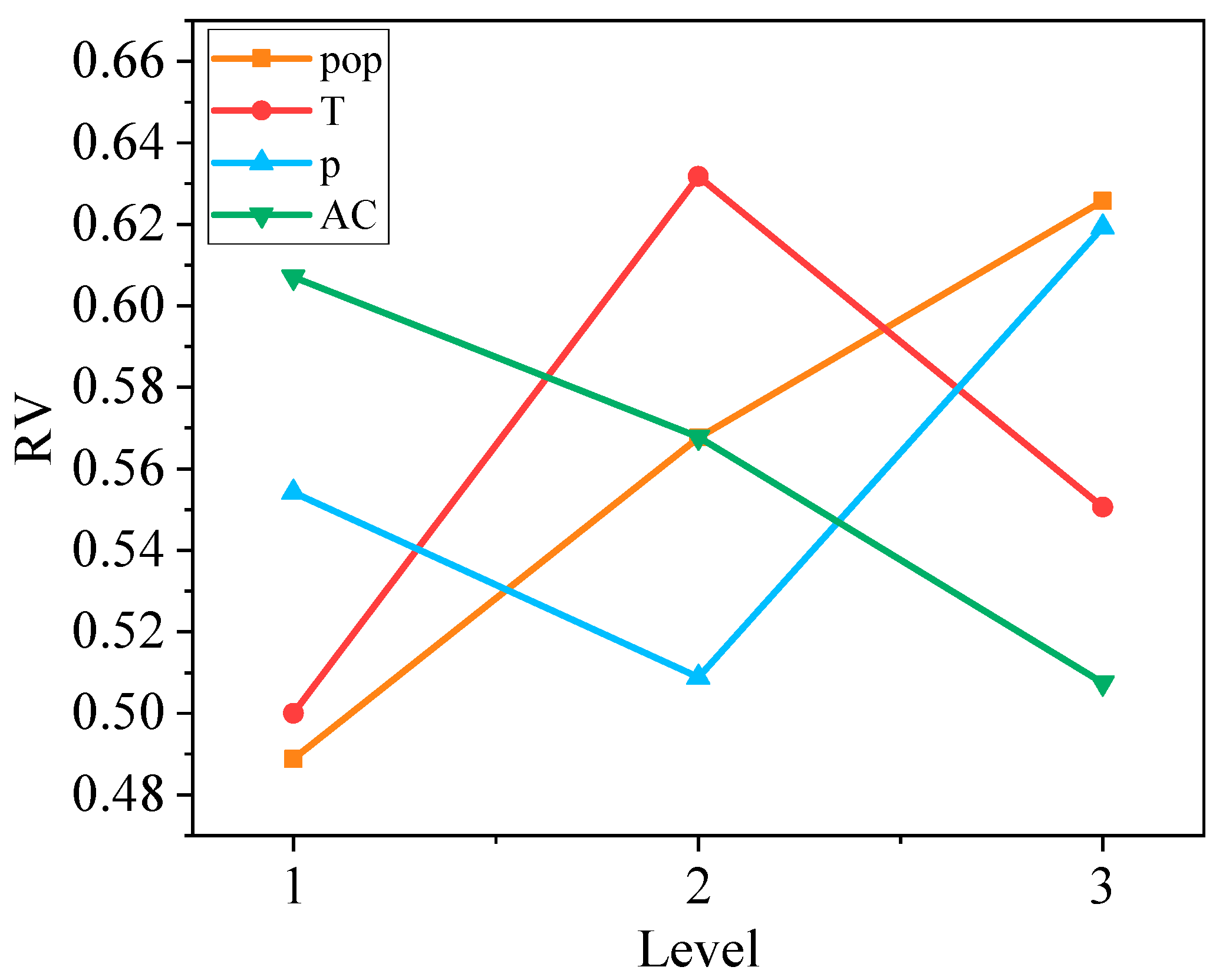
4.2. Optimization of Algorithm Parameters
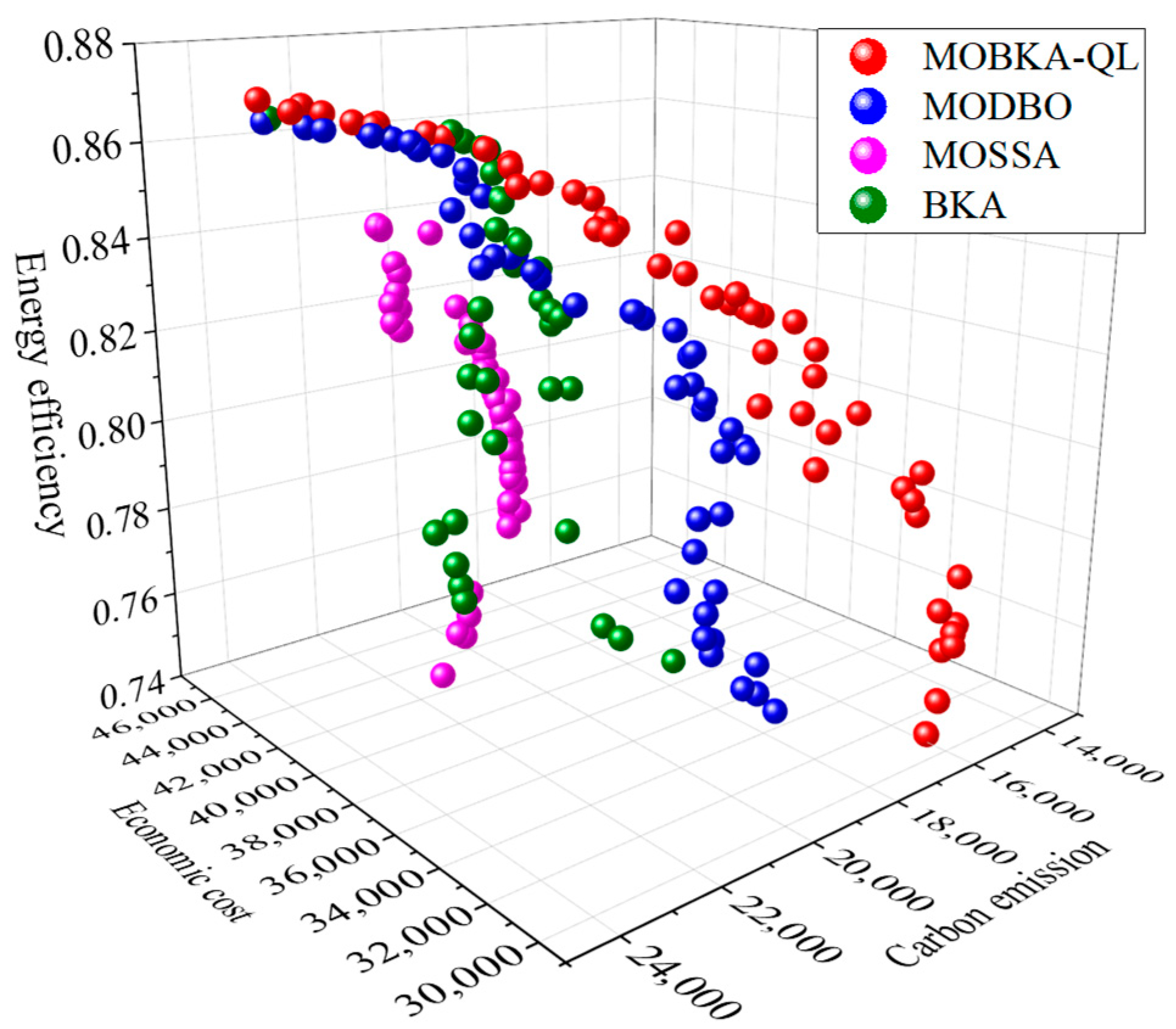
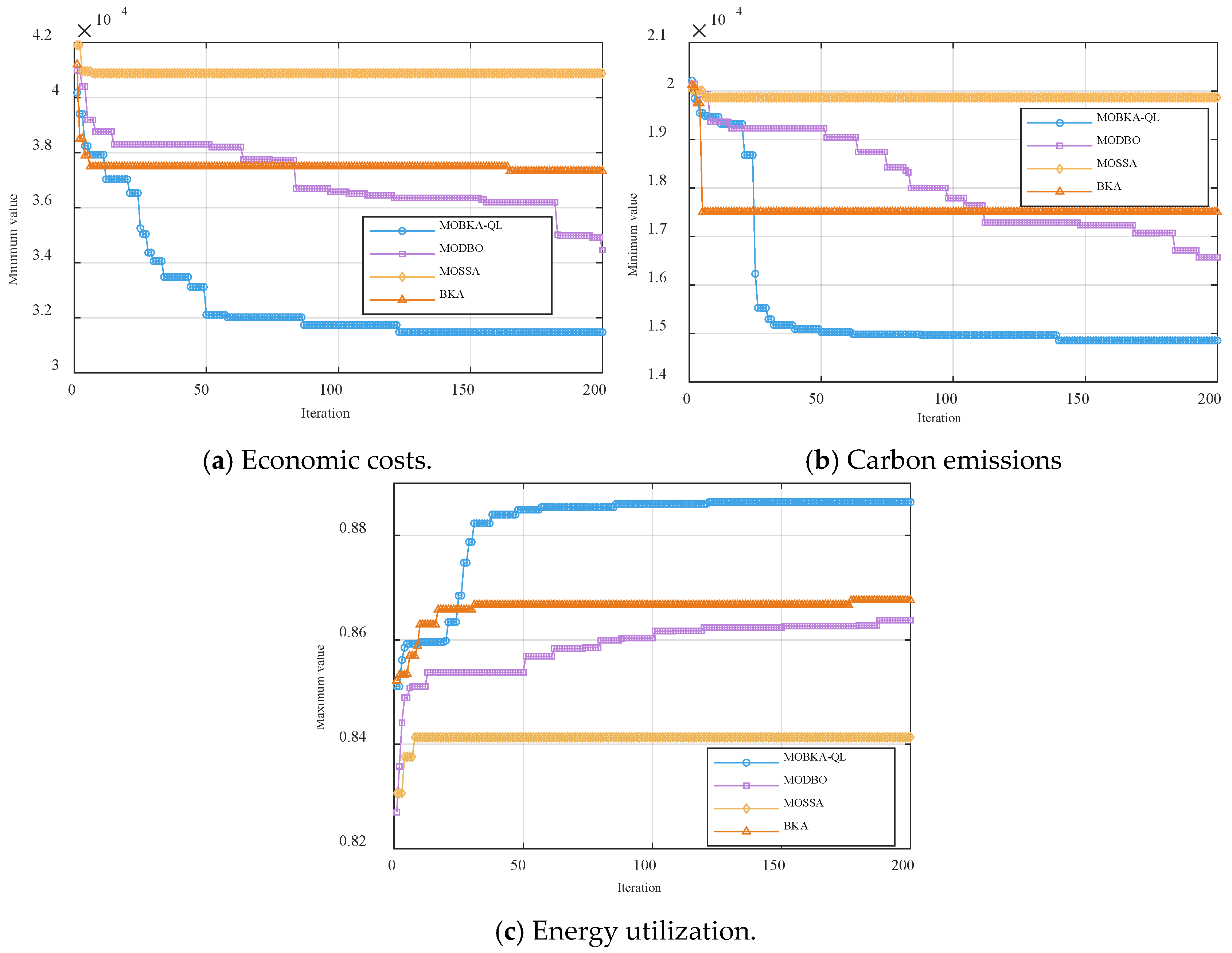
4.3. Algorithm Comparison Test
4.4. Model Comparison Test
4.5. Operation Strategy Optimization Analysis
4.6. Analysis of Typical Seasonal Operations
5. Conclusions
- (1)
- The proposed IES integrated with CCS+P2G demonstrated significant advantages over CIES during seasonal evaluation, achieving a 14.6% reduction in economic costs, a 13.9% decrease in carbon emissions, and a 28.8% improvement in energy efficiency. These results clearly indicate that the CCS+P2G-enhanced integrated energy system outperforms conventional systems in terms of operational efficiency, energy conservation, emission reduction, and cost-effectiveness. The performance metrics validate the substantial improvements offered by this innovative system configuration compared to traditional approaches.
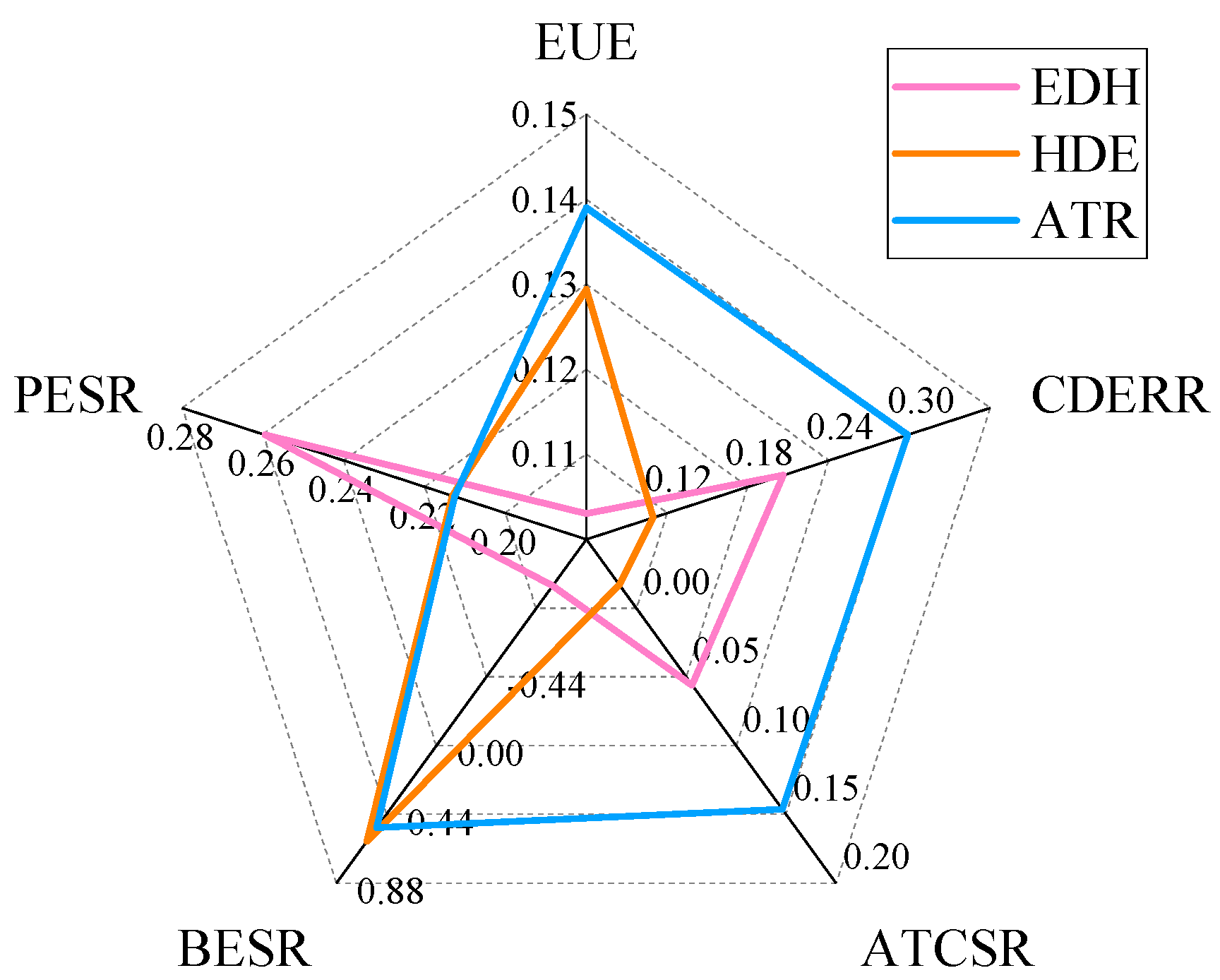
- (2)
- The experimental results for other typical seasons further confirm that the ATR strategy consistently outperformed the constant-ratio strategies. Specifically, compared with the EDH strategy, the ATR strategy reduced economic costs by 9.54%, decreased emissions by 11.5%, and improved system energy efficiency by 3.3%. When compared with the HDE strategy, the ATR strategy achieved reductions of 16.1% in economic cost and 20.1% in carbon emissions, along with a 0.8% improvement in energy efficiency. These results demonstrate that the ATR strategy provides significant advantages in minimizing operating costs, reducing environmental impact, and enhancing overall energy performance.
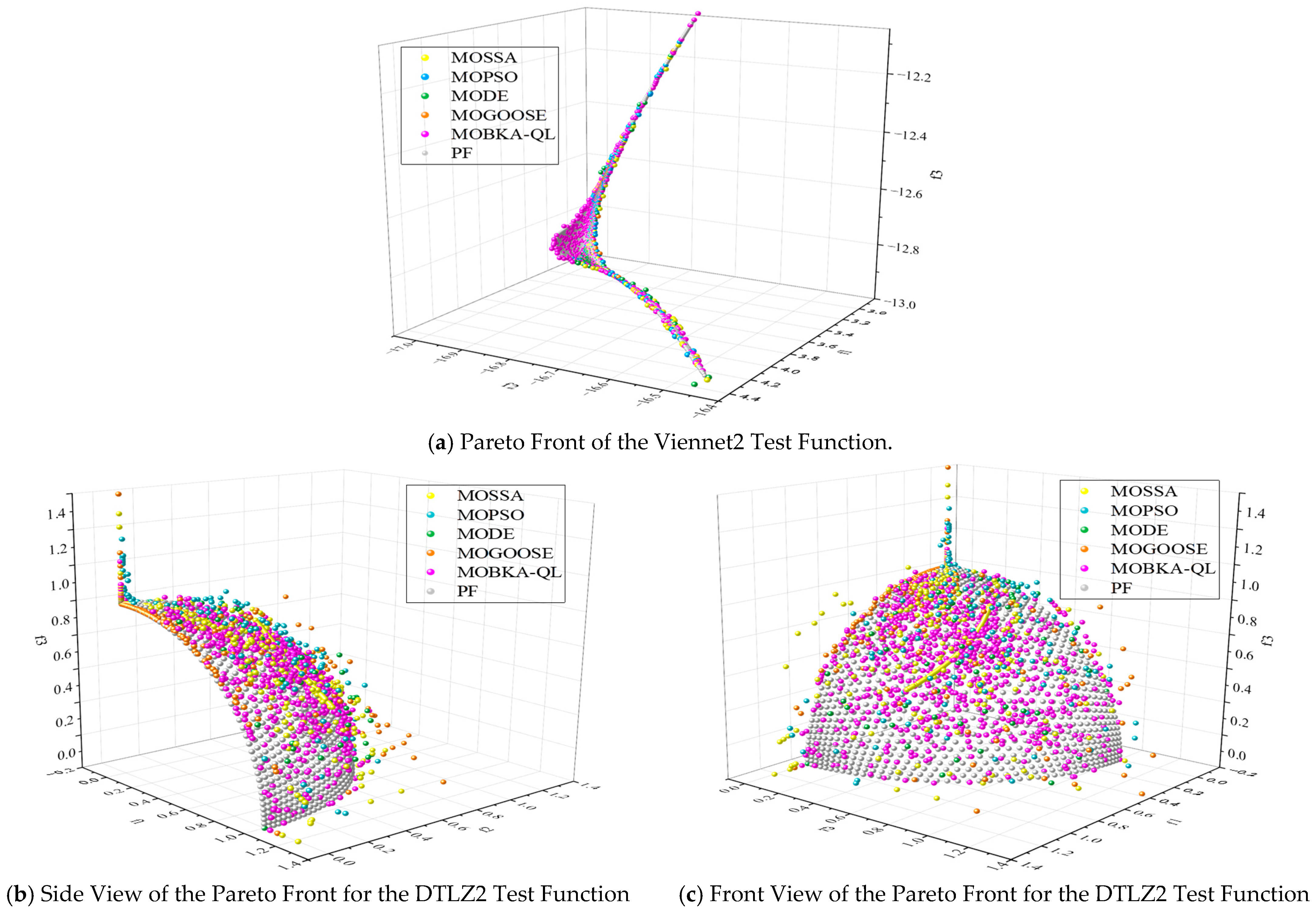
- (3)
- An adaptive mutation strategy based on Q-learning was integrated into the BKA algorithm. Evaluated through MOVI, this approach prevented the population from converging to local optima and increased mutation diversity. Furthermore, multi-objective optimization was applied to enhance the algorithm’s adaptability to complex problems. The results demonstrate that MOBKA-QL outperformed both the original BKA and other representative algorithms (e.g., MOPSO, MODE, and MOSSA, among others) in the IES system, yielding a wider Pareto front and higher solution accuracy, thus confirming its superiority.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviations | |
| AC | Absorption chiller |
| ATCSR | Annual total cost savings rate |
| ATR | Adjustable thermoelectric ratio |
| Ba | Battery |
| BKA | Black-winged kite algorithm |
| CCS | Carbon capture system |
| CDERR | Carbon dioxide emission reduction ratio |
| CHP | Combined heat and power |
| CIES | Conventional integrated energy systems |
| Cload | Cooling load |
| EC | Electric chiller |
| EDH | Electrically determined heat |
| EL | Electrolytic cell |
| Eload | Electric load |
| BESR | Boiler energy savings rate |
| EUE | Energy utilization efficiency |
| GB | Gas boiler |
| HDE | Heat determined electricity |
| HFC | Hydrogen fuel cell |
| HV | hypervolume |
| IES | Integrated energy systems |
| MOBKA-QL | Multi-objective black-winged kite algorithm based on Q-learning |
| MODBO | Multi-objective dung beetle optimizer |
| MOSSA | Multi-objective sparrow search algorithm |
| MOVI | Multi-objective variation index |
| MR | Methane reactor |
| OST | Oxygen storage tank |
| P2G | Power to gas |
| PESR | Primary energy saving rate |
| RV | Response variable |
| ST | Solar Thermal |
| TES | Thermal energy storage tank |
| Tload | Thermal load |
| WT | Wind Turbine |
| Parameters | |
| Electrical energy input to the electrolytic cell, kW | |
| Hydrogen energy output by an electrolytic water, kW | |
| Energy conversion efficiency of electrolytic cell | |
| Hydrogen energy input to the methane reactor, kW | |
| Methane reactor output of natural gas, kW | |
| Energy conversion efficiency of methane reactor | |
| Hydrogen fuel cell input hydrogen energy, kW | |
| Electrical energy output from hydrogen fuel cells, kW | |
| Thermal energy output from a hydrogen fuel cell, kW | |
| Efficiency of hydrogen fuel cell conversion to electricity | |
| Efficiency of hydrogen fuel cell conversion into heat energy | |
| Electricity consumed by carbon capture systems, kW | |
| Carbon dioxide captured by carbon capture systems | |
| Carbon dioxide consumed by power to gas | |
| The amount of gas produced by power to gas | |
| Electricity consumed by power to gas, kW | |
| Carbon dioxide consumed to produce unit methane | |
| Energy conversion efficiency of power to gas | |
| Calorific value of natural gas | |
| Hydrogen gas consumed to produce unit methane | |
| The methane reactor reacts with carbon dioxide as hydrogen | |
| Electrolysis of water produces all the hydrogen | |
| Hydrogen consumed by a hydrogen fuel cell | |
| The electricity output of the wind turbine, kW | |
| The electricity output of the solar thermal, kW | |
| Natural gas power input by combined heat and power, kW | |
| Power output of the combined heat and power, kW | |
| Heat energy output by combined heat and power, kW | |
| Energy conversion rate of combined heat and power | |
| Thermal energy conversion rate of combined heat and power | |
| Thermoelectric ratio of combined heat and power | |
| The heat output of the gas boiler, kW | |
| Gas consumed by gas-fired boilers | |
| Energy conversion efficiency of gas fired boilers | |
| Absorption of the cooling power of the refrigerator, kW | |
| The heat energy absorbed by the absorption refrigerator, kW | |
| Refrigeration efficiency of absorption chillers | |
| The cooling power of the electric refrigerator | |
| Refrigeration efficiency of electric refrigerator | |
| Refrigeration efficiency of electric refrigerator | |
| The charging power of the battery, kW | |
| The discharge power of the battery, kW | |
| The charging efficiency of the battery | |
| The discharge efficiency of the battery | |
| Battery loss factor | |
| Heat charging power of heat storage tank, kW | |
| Heat discharge power of heat storage tank, kW | |
| Heat storage efficiency of heat storage tank | |
| Heat release efficiency of heat storage tank | |
| Loss coefficient of heat storage tank | |
| The volume of oxygen in the tank | |
| Oxygen storage tank | |
| Oxygen from the tank | |
| Oxygen storage coefficient of oxygen storage tank | |
| Oxygen discharge coefficient of oxygen storage tank | |
| The input power of the gas boiler, kW | |
| Electricity purchased from the grid, kW | |
| Binary variables of n energy storage devices | |
| Charge and discharge power of the NTH energy storage device, kW |
References
- Ul’yanin, Y.A.; Kharitonov, V.V.; Yurshina, D.Y. Forecasting the dynamics of the depletion of conventional energy resources. Stud. Russ. Econ. Dev. 2018, 29, 153–160. [Google Scholar] [CrossRef]
- Olabi, A.G.; Obaideen, K.; Abdelkareem, M.A.; AlMallahi, M.N.; Shehata, N.; Alami, A.H.; Mdallal, A.; Hassan, A.A.M.; Sayed, E.T. Wind energy contribution to the sustainable development goals: Case study on London array. Sustainability 2023, 15, 4641. [Google Scholar] [CrossRef]
- Pourasl, H.H.; Barenji, R.V.; Khojastehnezhad, V.M. Solar energy status in the world: A comprehensive review. Energy Rep. 2023, 10, 3474–3493. [Google Scholar] [CrossRef]
- Bagherian, M.A.; Mehranzamir, K.; Pour, A.B.; Rezania, S.; Taghavi, E.; Nabipour-Afrouzi, H.; Dalvi-Esfahani, M.; Alizadeh, S.M. Classification and analysis of optimization techniques for integrated energy systems utilizing renewable energy sources: A review for CHP and CCHP systems. Processes 2021, 9, 339. [Google Scholar] [CrossRef]
- Zhao, J.; Luo, X.; Tu, Z.; Chan, S.H. A novel CCHP system based on a closed PEMEC-PEMFC loop with water self-supply. Appl. Energy 2023, 338, 120921. [Google Scholar] [CrossRef]
- Zou, D.; Gong, D.; Ouyang, H. A non-dominated sorting genetic approach using elite crossover for the combined cooling, heating, and power system with three energy storages. Appl. Energy 2023, 329, 120227. [Google Scholar] [CrossRef]
- Pan, C.; Jin, T.; Li, N.; Wang, G.; Hou, X.; Gu, Y. Multi-objective and two-stage optimization study of integrated energy systems considering P2G and integrated demand responses. Energy 2023, 270, 126846. [Google Scholar] [CrossRef]
- Chen, Z.; Yiliang, X.; Hongxia, Z.; Yujie, G.; Xiongwen, Z. Optimal design and performance assessment for a solar powered electricity, heating and hydrogen integrated energy system. Energy 2023, 262, 125453. [Google Scholar] [CrossRef]
- Meng, Q.; Xu, J.; Ge, L.; Wang, Z.; Wang, J.; Xu, L.; Tang, Z. Economic optimization operation approach of integrated energy system considering wind power consumption and flexible load regulation. J. Electr. Eng. Technol. 2024, 19, 209–221. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, X.; Huang, X.; Tian, Y.; Huang, B. Sustainability design and analysis of a regional energy supply CHP system by integrating biomass and solar energy. Sustain. Prod. Consum. 2023, 41, 228–241. [Google Scholar] [CrossRef]
- Zaik, K.; Werle, S. Solar and wind energy in Poland as power sources for electrolysis process-A review of studies and experimental methodology. Int. J. Hydrogen Energy 2023, 48, 11628–11639. [Google Scholar] [CrossRef]
- Li, J.; He, X.; Li, W.; Zhang, M.; Wu, J. Low-carbon optimal learning scheduling of the power system based on carbon capture system and carbon emission flow theory. Electr. Power Syst. Res. 2023, 218, 109215. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Ji, T.; Cai, Z.; Li, L.; Xu, Z. Coordinated optimal dispatch and market equilibrium of integrated electric power and natural gas networks with P2G embedded. J. Mod. Power Syst. Clean Energy 2018, 6, 495–508. [Google Scholar] [CrossRef]
- Calise, F.; Cappiello, F.L.; Cimmino, L.; D’aCcadia, M.D.; Vicidomini, M. Dynamic simulation and thermoeconomic analysis of a power to gas system. Renew. Sustain. Energy Rev. 2023, 187, 113759. [Google Scholar] [CrossRef]
- He, K.; Zeng, L.; Yang, J.; Gong, Y.; Zhang, Z.; Chen, K. Optimization Strategy for Low-Carbon Economy of Integrated Energy System Considering Carbon Capture-Two Stage Power-to-Gas Hydrogen Coupling. Energies 2024, 17, 3205. [Google Scholar] [CrossRef]
- Stecca, M.; Elizondo, L.R.; Soeiro, T.B.; Bauer, P.; Palensky, P. A comprehensive review of the integration of battery energy storage systems into distribution networks. IEEE Open J. Ind. Electron. Soc. 2020, 1, 46–65. [Google Scholar] [CrossRef]
- Hassan, R.; Das, B.K.; Al-Abdeli, Y.M. Investigation of a hybrid renewable-based grid-independent electricity-heat nexus: Impacts of recovery and thermally storing waste heat and electricity. Energy Convers. Manag. 2022, 252, 115073. [Google Scholar] [CrossRef]
- Song, Z.; Liu, T.; Lin, Q. Multi-objective optimization of a solar hybrid CCHP system based on different operation modes. Energy 2020, 206, 118125. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Gen, M.; Lin, L. Genetic algorithms and their applications. In Springer Handbook of Engineering Statistics; Springer: London, UK, 2023; pp. 635–674. [Google Scholar]
- Rana, N.; Latiff, M.S.A.; Abdulhamid, S.M.; Chiroma, H. Whale optimization algorithm: A systematic review of contemporary applications, modifications and developments. Neural Comput. Appl. 2020, 32, 16245–16277. [Google Scholar] [CrossRef]
- Li, L.L.; Ren, X.Y.; Tseng, M.L.; Wu, D.-S.; Lim, M.K. Performance evaluation of solar hybrid combined cooling, heating and power systems: A multi-objective arithmetic optimization algorithm. Energy Convers. Manag. 2022, 258, 115541. [Google Scholar] [CrossRef]
- Yu, H.; Gao, Y.; Wang, J. A multiobjective particle swarm optimization algorithm based on competition mechanism and gaussian variation. Complexity 2020, 2020, 5980504. [Google Scholar] [CrossRef]
- Li, S.; Li, J. Chaotic dung beetle optimization algorithm based on adaptive t-Distribution. In Proceedings of the 2023 IEEE 3rd International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 26–28 May 2023; Volume 3, pp. 925–933. [Google Scholar]
- Dong, Y.; Zhang, H.; Wang, C.; Zhou, X. Soft actor-critic DRL algorithm for interval optimal dispatch of integrated energy systems with uncertainty in demand response and renewable energy. Eng. Appl. Artif. Intell. 2024, 127, 107230. [Google Scholar] [CrossRef]
- Suo, L.; Peng, T.; Song, S.; Zhang, C.; Wang, Y.; Fu, Y.; Nazir, M.S. Wind speed prediction by a swarm intelligence based deep learning model via signal decomposition and parameter optimization using improved chimp optimization algorithm. Energy 2023, 276, 127526. [Google Scholar] [CrossRef]
- Li, Y.; Bu, F.; Li, Y.; Long, C. Optimal scheduling of island integrated energy systems considering multi-uncertainties and hydrothermal simultaneous transmission: A deep reinforcement learning approach. Appl. Energy 2023, 333, 120540. [Google Scholar] [CrossRef]
- Chen, L.; Wu, J.; Tang, H.; Jin, F.; Wang, Y. A Q-learning based optimization method of energy management for peak load control of residential areas with CCHP systems. Electr. Power Syst. Res. 2023, 214, 108895. [Google Scholar]
- Dong, Y.; Wang, C.; Zhang, H.; Zhou, X. A novel multi-objective optimization framework for optimal integrated energy system planning with demand response under multiple uncertainties. Inf. Sci. 2024, 663, 120252. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.; Hu, X.; Qiu, L.; Zang, H.-F. Black-winged kite algorithm: A nature-inspired meta-heuristic for solving benchmark functions and engineering problems. Artif. Intell. Rev. 2024, 57, 98. [Google Scholar] [CrossRef]
- Mohammad, J.; Shahriyar, H.G.; Ata, C.; Song, J.; Markides, C.N. Electrolyzer cell-methanation/Sabatier reactors integration for power-to-gas energy storage: Thermo-economic analysis and multi-objective optimization. Appl. Energy 2023, 329, 120268. [Google Scholar]
- Hu, J.; Zou, Y.; Zhao, Y. Robust operation of hydrogen-fueled power-to-gas system within feasible operating zone considering carbon-dioxide recycling process. Int. J. Hydrogen Energy 2024, 58, 1429–1442. [Google Scholar] [CrossRef]
- Wu, M.; Wu, Z.; Shi, Z. Low carbon economic dispatch of integrated energy systems considering utilization of hydrogen and oxygen energy. Int. J. Electr. Power Energy Syst. 2024, 158, 109923. [Google Scholar] [CrossRef]
- Gao, J.; Meng, Q.; Liu, J.; Wang, Z. Thermoelectric optimization of integrated energy system considering wind-photovoltaic uncertainty, two-stage power-to-gas and ladder-type carbon trading. Renew. Energy 2024, 221, 119806. [Google Scholar] [CrossRef]
- Liang, J.; Tian, M.; Liu, Y.; Zhou, J. Coverage optimization of soil moisture wireless sensor networks based on adaptive Cauchy variant butterfly optimization algorithm. Sci. Rep. 2022, 12, 11687. [Google Scholar] [CrossRef] [PubMed]
- Wen, J.; Wu, X.; Jiang, K.; Cao, B. Particle swarm algorithm based on normal cloud. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 1492–1496. [Google Scholar]
- Cui, L.; Li, G.; Zhu, Z.; Lin, Q.; Wong, K.-C.; Chen, J.; Lu, N.; Lu, J. Adaptive multiple-elites-guided composite differential evolution algorithm with a shift mechanism. Inf. Sci. 2018, 422, 122–143. [Google Scholar] [CrossRef]
- Lin, M.; Wang, Z.; Chen, D.; Zheng, W. Particle swarm-differential evolution algorithm with multiple random mutation. Appl. Soft Comput. 2022, 120, 108640. [Google Scholar] [CrossRef]
- Saadaoui, D.; Elyaqouti, M.; Assalaou, K.; Ben Hmamou, D.; Lidaighbi, S. Parameters optimization of solar PV cell/module using genetic algorithm based on non-uniform mutation. Energy Convers. Manag. X 2021, 12, 100129. [Google Scholar] [CrossRef]
- Ren, X.Y.; Li, L.L.; Ji, B.X.; Liu, J.-Q. Design and analysis of solar hybrid combined cooling, heating and power system: A bi-level optimization model. Energy 2024, 292, 130362. [Google Scholar] [CrossRef]
- Li, Q.; Zeng, X.; Wei, W. Multi-objective particle swarm optimization algorithm using Cauchy mutation and improved crowding distance. Int. J. Intell. Comput. Cybern. 2023, 16, 250–276. [Google Scholar] [CrossRef]
- Yu, H.; Li, J.; Chen, X.; Niu, W.; Sang, H.-Y. An improved multi-objective imperialist competitive algorithm for surgical case scheduling problem with switching and preparation times. Clust. Comput. 2022, 25, 3591–3616. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variation Strategy | Variation Formula |
|---|---|
| Gaussian variation | |
| Gaussian elite variation | |
| Cauchy variation | |
| Inverse cumulative distribution function | |
| t-distribution variation | |
| Adaptive t-distribution variation | |
| Normal cloud variation | |
| Periodic variation | |
| Elite differential variation 1 | |
| Random elite differential variation | |
| Random difference variation | |
| Elite differential variation 2 | |
| Heterogeneous variation |
| Reward Mechanism | Average MOVI Improvement | Convergence Times | Number of Non-Dominated Solutions |
|---|---|---|---|
| Symmetrical (+1/−1) | 0.083 | 78 | 35 |
| Excessive punishment (+1/−5) | 0.071 | 92 | 28 |
| Asymmetric (+2/−1) | 0.096 | 51 | 40 |
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 0.85 | 0.95 | 0.56 | |||
| 0.7 | 0.95 | 0.85 | |||
| 0.785 | 0.01 | 0.93 | |||
| 0.613 | 0.95 | 0.6 | |||
| 0.724 t/kWh | 0.95 | 800 kWh | |||
| 0.00328 t/kWh | 35 | 1000 kWh | |||
| 0.00376 t/kWh | 0.5 | 800 kWh | |||
| 0.55 t/kWh | 0.25 | 3000 kWh | |||
| 0.95 | 2 | 0.392 t/kWh | |||
| 0.95 | 0.5 | 0.0016 t/kWh | |||
| 0.1 | 4 m3 | 0.00197 t/kWh | |||
| 0.33 kWh/h | 11 kWh | 0.01 ¥/kWh | |||
| 1 m3 | 500 kW | 0.096 ¥/kWh | |||
| 3000 kWh | 1500 kW | 0.122 ¥/kWh | |||
| 2000 kWh | 0.13 ¥/kWh | 0.065 ¥/kWh | |||
| 800 kWh | 0.0835 ¥/kWh | 0.024 ¥/kWh | |||
| 800 kWh | 0.028 ¥/kWh | 0.01 ¥/kWh | |||
| 4000 kWh | 0.0012 t/kWh | 0.01 ¥/kWh |
| Parameter | Level | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| pop | 100 | 200 | 300 |
| T | 100 | 200 | 300 |
| p | 0.8 | 0.85 | 0.9 |
| AC | 50 | 65 | 80 |
| Number | Factor | RV | |||
|---|---|---|---|---|---|
| pop | T | p | AC | ||
| 1 | 1 | 1 | 1 | 1 | 0.4677735 |
| 2 | 1 | 2 | 2 | 2 | 0.5148920 |
| 3 | 1 | 3 | 3 | 3 | 0.4838482 |
| 4 | 2 | 1 | 2 | 3 | 0.4016394 |
| 5 | 2 | 2 | 3 | 1 | 0.7434524 |
| 6 | 2 | 3 | 1 | 2 | 0.5579683 |
| 7 | 3 | 1 | 3 | 2 | 0.6305002 |
| 8 | 3 | 2 | 1 | 3 | 0.6367929 |
| 9 | 3 | 3 | 2 | 1 | 0.6099820 |
| Confidence Interval | Sample Mean | HV | Time | Spacing | |||
|---|---|---|---|---|---|---|---|
| MOBKA-QL | Economic cost | 36,920 | 39,044 | 37,982 | 0.0388 | 244.2983 | 17,202.8877 |
| Carbon emission | 17,115 | 18,316 | 17,716 | ||||
| Energy efficiency | 0.8121 | 0.82943 | 0.82076 | ||||
| MODBO | Economic cost | 39,006 | 40,591 | 39,798 | 0.0240 | 476.1714 | 13,204.9437 |
| Carbon emission | 18,760 | 19,583 | 19,171 | ||||
| Energy efficiency | 0.8062 | 0.8242 | 0.8152 | ||||
| MOSSA | Economic cost | 42,122 | 42,644 | 42,383 | 0.0054 | 239.0350143 | 4002.8724 |
| Carbon emission | 20,409 | 20,737 | 20,573 | ||||
| Energy efficiency | 0.7982 | 0.8092 | 0.8037 | ||||
| BKA | Economic cost | 41,076 | 42,492 | 41,784 | 0.0270 | 238.6687 | 9745.7401 |
| Carbon emission | 20,304 | 21,076 | 20,690 | ||||
| Energy efficiency | 0.7928 | 0.8228 | 0.8078 | ||||
| ATCSR | EUE | CDERR |
|---|---|---|
| 14.63% | 28.84% | 13.90% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, R.; Yan, X.; Fan, Z.; Tu, N. Multi-Objective Scheduling Method for Integrated Energy System Containing CCS+P2G System Using Q-Learning Adaptive Mutation Black-Winged Kite Algorithm. Sustainability 2025, 17, 5709. https://doi.org/10.3390/su17135709
Shi R, Yan X, Fan Z, Tu N. Multi-Objective Scheduling Method for Integrated Energy System Containing CCS+P2G System Using Q-Learning Adaptive Mutation Black-Winged Kite Algorithm. Sustainability. 2025; 17(13):5709. https://doi.org/10.3390/su17135709
Chicago/Turabian StyleShi, Ruijuan, Xin Yan, Zuhao Fan, and Naiwei Tu. 2025. "Multi-Objective Scheduling Method for Integrated Energy System Containing CCS+P2G System Using Q-Learning Adaptive Mutation Black-Winged Kite Algorithm" Sustainability 17, no. 13: 5709. https://doi.org/10.3390/su17135709
APA StyleShi, R., Yan, X., Fan, Z., & Tu, N. (2025). Multi-Objective Scheduling Method for Integrated Energy System Containing CCS+P2G System Using Q-Learning Adaptive Mutation Black-Winged Kite Algorithm. Sustainability, 17(13), 5709. https://doi.org/10.3390/su17135709