Abstract
As it is urgently needed to address the energy consumption and health care problems caused by population growth, the field of sustainable energy collection and storage equipment as well as intelligent health care for monitoring human motion behavior has received wide attention and achieved rapid development. However, the portable intelligent systems that integrate them have not been widely discussed. In this work, we propose a design of a nanogenerator-based wireless intelligent motion correction system, combining triboelectric nanogenerator technology with wireless intelligent host computer signal processing and visualization systems. Under the condition of no external power supply, a noninvasive triboelectric nanogenerator (FL-TENG) sensor integrated system stores the mechanical energy due to human movement behavior and drives wireless micro-electronic devices to realize the human–computer interaction application of the intelligent system. In the conducted test, the reported instantaneous output of an ordinary clap action was around 241V. For a variety of physical exercise types being monitored, it can accurately determine human movement behavior and perform error correction and scoring for movement techniques. Additionally, using hydrogel as an electrode improves the service life and stability of the device. Therefore, this flexible and convenient design concept is beneficial to the development and utilization of sustainable energy and sports activities. In addition, it extends the application prospects of FL-TENG in self-powered sensing systems.
1. Introduction
The world’s population has exceeded 8 billion. As the population grows, issues such as sustainable energy and human health are becoming more critical challenges [,,]. In terms of energy, population growth depends on external energy resources, and the excessive consumption of these resources leads to pollution and resource depletion (Figure 1). In addition, it is a major cause of climate change and environmental degradation [,,]. Therefore, there is an urgent need for clean and sustainable energy as well as energy storage technologies for energy applications or environmental remediation. In terms of human health, humans and nature form a holistic community of life. As the population numbers increase, the energy availability and security challenges need to be solved urgently, and at the same time, human health is a main concern. Voltaire, a famous French philosopher, stated that life lies in movement. Reasonable physical exercise is recognized by the world as an effective means of disease prevention or rehabilitation training after an unfortunate illness [,,,,,,,]. Therefore, the real-time acquisition of movement behavior data to monitor individual health status is currently a multidisciplinary research hot topic. In this context, researchers have given priority to solving the issues of energy sustainability and energy storage, while at the same time meeting the needs of human health.

Figure 1.
Humanity is facing environmental pollution, resource shortages, and health problems, as well as the pursuit of green and healthy sustainable concepts.
Since they were first announced in 2012, triboelectric nanogenerators (TENG) have gradually become one of the main concepts of sustainable renewable energy technologies [,,,,,,,,]. They are based on the coupling effect of triboelectrification and electrostatic induction and have the advantages of small size, light mass, soft material, a wide choice of materials, low-price, and easy to manufacture. It was reported that the TENG technology for obtaining energy by harnessing water waves or wind energy had been implemented in large-scale self-powered systems [,,,,,,,]. In this context, such technology could make efficient use of the mechanical energy of human movement and convert random alternating current energy into 60% direct current efficiency for energy storage or energy supply to the device []. In addition, in the field of human health monitoring, TENG’s excellent self-powered performance has attracted widespread attention in the application of portable bioelectronic sensing technology to monitor real-time health status, such as human movement and vital body signs [,,,,,,,,,]. Moreover, combined with the Internet of Things and artificial intelligence algorithms, it has the potential to establish smarter healthcare without the need for repeated recharging, which will lead to lower application efficiency or e-waste by battery replacement. Therefore, TENG has wide application prospects in energy collection, intelligent medical treatment, and motion monitoring.
In other groups of research reports on sensing technologies, various forms of sensor devices were combined with wireless intelligent host signal processing and visualization systems to enable wireless transmission and visualization of monitoring data. For example, researchers fabricated and used hybrid piezoelectric and electromagnetic sensors to construct a self-powered, multifunctional IoT environmental monitoring system that transmits environmental monitoring data to a smartphone for visualization []. Alternatively, a wearable piezoresistive sensor was fabricated, which was combined with a signal transmission system to create a novel healthcare system for real-time monitoring of health status through a smart interface []. In a recent study related to friction electrical sensing technology, a TENG-based wearable device was proposed to achieve accurate identification of the health status of different people by analyzing the signal processing through machine learning techniques [].
In this paper, we present an intelligent motion correction system for storing mechanical energy of the human body and obtaining human motion behavior in real time. It combines the triboelectric nanogenerator technology with a wireless intelligent host computer signal processing and visualization system. The proposed system can continuously collect the mechanical energy of human movement and at the same time evaluate the motion parameters to help form the correct motion technique and thus avoid the injury caused by the wrong motion or behavior. A triboelectric nanogenerator (FL-TENG) uses transparent polytetrafluoroethylene (PTFE) film and transparent polyurethane (PU) film as the friction layers, polydimethylsiloxane (PDMS) as the support layer, and hydrogel as the electrode. Thus, it can be easily attached to the surface of human skin. Through a triboelectric effect, the mechanical energy of body movement is converted into electrical energy, which can supply power for microelectronic equipment and meet the needs of wireless sensing. Moreover, electrical signals can be used as sensing signals of physical movement behavior, and error correction of motion behavior can be realized through intelligent host computer signal processing and visualization systems. Furthermore, compared with a copper electrode, the hydrogel has the advantages of stretchability and no metal fatigue, which can further improve the life and stability of the device. This work is beneficial to the development and utilization of sustainable energy and sports activities and extends the application of TENG in self-powered sensing systems.
2. Experiment
2.1. Materials
Polyurethane (PU) film was purchased from Dongguan Jinda Plastic Insulation Material Shop (Dongguan, China). Transparent PTFE was purchased from Taizhou Huafu Plastic Industry Co., Ltd. (Taizhou, China). N, N-dimethylformamide (DMF); deionized water, acrylamide (AM); lithium chloride (LiCl); N0, N0-methylene diacrylamide (MBA); ammonium persulfate (APS); and N0, N0, N0, N0-tetramethylethylenediamine (TMLD) were purchased from Jintong Loctite (Beijing, China). Dow Corning DC184 was purchased from Xinheng Trading Co., Ltd. (Tianjin, China).
2.2. Production of FL-TENG
Preparation of PDMS support layer: First, PDMS solution and curing agent were mixed in a 10:1 weight ratio and stirred for 5 min to make them well mixed. Next, the mixed solution was shaken for 15 min using a water bath ultrasonic oscillator to remove air bubbles. Finally, after shaking for 10 min, we poured it on the mold and dried it in a blast drying oven at 85 °C for 10 min to obtain the PDMS support layer.
Preparation of hydrogels: AM as monomer, MBA as cross-linker, APS as initiator, and TMEDA as the catalyst. First, 35 mL of pure water and 5 mL of deionized water were weighed and mixed, and 12 g of acrylamide powder and 14 g of lithium chloride particles were added to them and stirred using a magnetic stirrer at 800 rpm to obtain 4.23 mol/L and 8.24 mol/L of mixed AM and LiCl solutions. Next, 0.04 mol/L APS and 0.03 mol/L MBA were added to the mixed solution simultaneously to obtain the pre-solution. Finally, the pre-solution was poured on the mold, and a drop of TMEDA was added to accelerate the association of the hydrogels to obtain PAAM-LiCl hydrogels.
Complete fabrication of the device: First, according to the size of the PDMS supporting layer, PU film and PTFE film of the same size were cut. Secondly, the hydrogel electrodes were cut according to the size of PU and PTFE films, and the hydrogel electrodes were closely laminated with PU and PTFE films to form the two friction layers of TENG. Finally, the PTFE film was used as a negative layer, the flexible PDMS was used as an intermediate support layer, which facilitates the contact and separation of the two friction layers, and the PU film was used as a positive layer. These three layers were stacked in sequence, and both ends were fixed with adhesive tape to form the complete device.
2.3. Characterization and Measurement
The FL-TENG was fixed to a stepper motor to simulate a taekwondo competition strike. The performance of the FL-TENG was tested using different amplitudes and frequencies. The sensing signals were generated by the FL-TENG and acquired by an oscilloscope (sto1102c, Shenzhen, China). The morphology and structure of the PU film were obtained by an optical microscope (Sunshine Instrumentation Co., SDPTOP-CX 40 m, Ningbo, China). The cross-sectional morphology and structure of the device were obtained by a scanning electron microscope (HITACHI S-4800, Suzhou, China).
3. Results and Discussion
With the rapid growth of the population, people are frequently consuming more and more natural resources, thus causing energy depletion and environmental degradation. For long and healthy development, human beings need to live in a harmonious environment and seek sustainable energy. As shown in Figure 2a, FL-TENG can convert biomechanical energy into electrical energy and then store it. At the same time, FL-TENG can be combined with a wireless sensing system to realize wireless real-time data transmission. In addition, FL-TENG can be easily attached to the joints of the human body, and it can achieve real-time monitoring of human movement using only the collected biomechanical energy without external power support. The data acquired by the sensing system can be used as a basis for healthcare examinations as well as a motion correction system to process and analyze the motion status for evaluation. Figure 2b shows the fabrication process of FL-TENG. First, acrylamide, lithium chloride, ammonium persulfate, and NN-methylene bisacrylamide were mixed in a certain ratio, mixed thoroughly, and poured into a mold and prepared by adding two drops of TMEDA catalyst to obtain hydrogel electrodes. Then, PDMS solution and a curing agent were mixed in a weight ratio of 10:1, mixed thoroughly to remove air bubbles, and poured into the mold. It was dried at 85 °C for 10 min to obtain the support layer. Finally, the upper polyurethane (PU) membrane, the middle PDMS support layer, the lower polytetrafluoroethylene (PTFE) membrane, and the hydrogel electrodes distributed on the upper and lower surfaces were stacked together to obtain the complete device. The structure of the polymer-based integrated frictional electric nanogenerator during bending and release and the associated electrical measurement tests are schematically illustrated in Figure 2c. FL-TENG is like a sandwich structure with three different polymer sheets stacked alternately: polyurethane (PU) film and polytetrafluoroethylene (PTFE) film as the friction layers, and polydimethylsiloxane (PDMS) as the support layer. The device is bent by external forces to generate electrical output by contact separation. Figure 2d demonstrates the flexibility and bendability of the FL-TENG, and the flexible sensing device makes humans safer and more comfortable during motion monitoring. Scanning electron microscope images of the PU and PTFE layers’ cross-sections are shown in Figure 2e, from which it can be seen that the hydrogel electrodes fit closely with the two friction layers without gaps, so there is no contact separation between the hydrogel electrodes and the friction layers. In addition, hydrogel as the electrode is one of the highlights of this paper. A hydrogel electrode has superior stretchability compared to a steel electrode (Supplementary Materials Figure S1), which is more suitable for sports monitoring as it is not easy to break and can maintain stable electrical output during large and drastic joint movements.

Figure 2.
Application and characterization of FL-TENG. (a) Application of FL-TENG in green energy harvesting. (b) The fabrication process of FL-TENG. (c) Structure of FL-TENG during bending and release and the associated electrical measurement tests. (d) Bending photograph of FL-TENG (e) Scanning electron microscopy image of FL-TENG in cross-section.
The working mechanism of FL-TENG is shown in Figure 3a, which shows the single electrical output process of FL-TENG. In this figure, polyurethane (PU) film is used as the top dielectric friction layer, polytetrafluoroethylene (PTFE) is used as the bottom dielectric friction layer, PDMS is used as the middle support layer to facilitate the contact and separation between the two friction layers of PU film and PTFE film, and the hydrogel is used as the conductive electrode. Initially, no external force is applied to FL-TENG, and the top and bottom dielectric friction layers are separated. When an external force is applied to the FL-TENG, the FL-TENG is deformed, resulting in complete contact between the polyurethane (PU) friction layer and the polytetrafluoroethylene (PTFE) friction layer, and due to the frictional electric effect, produces frictional electricity. Moreover, the polyurethane (PU) layer tends to lose electrons and the polytetrafluoroethylene (PTFE) layer tends to gain electrons easily, and electrons are transferred from the surface of the polyurethane (PU) layer to the polytetrafluoroethylene (PTFE) layer (state I). When the applied external force disappears gradually, the upper friction layer and the lower friction layers are separated, and the charge separation on the surface of the friction layer generates a potential difference, which drives the charge transfer from the electrode with the PTFE layer to the electrode with the PU layer (state II). When the applied external force disappears completely, the charge transfer ends and the electron flow stops (state III). When the FL-TENG is compressed by the force again, the upper and lower friction layers approach each other to produce a reverse internal electric field, and electrons are transferred from the electrode with the polyurethane (PU) layer to the electrode with the polytetrafluoroethylene (PTFE) layer (state IV). A cycle is completed when the upper and bottom friction layers are in full contact. Afterward, the FL-TENG is compressed and released to start a new cycle. Corresponding simulations of potential distribution in four different states by COMSOL are presented in Figure 3b. Because of its unique working mechanism and excellent outputting voltage characteristics, it can be used for monitoring various sports activities.
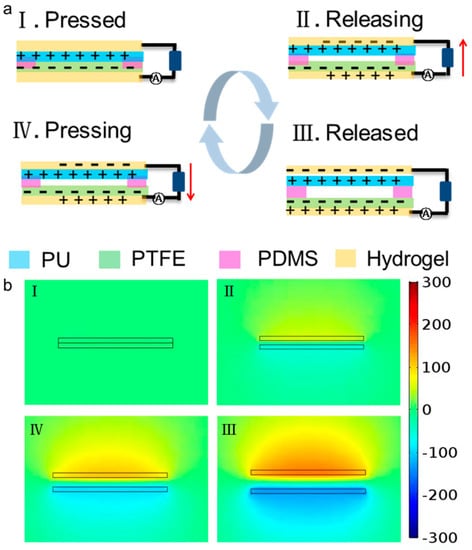
Figure 3.
The working mechanism of FL-TENG. (a) Schematic diagram of the working principle of FL-TENG. (b) Potential simulation by COMSOL to elucidate the working principle of FL-TENG.
As a sensor used to acquire human motion behavior in real time, it is necessary to ensure the sensitivity and stability of the sensor. We tested the electrical output performance of the FL-TENG, as shown in Figure 4. We fixed the FL-TENG with a size of 7.5 cm × 3 cm and a friction contact area of 6 × 1.7 cm² to a stepper motor and we used the stepper motor to imitate the human body movement. Figure 4a shows that the output voltage is measured at the same bending angle and different frequencies. The output voltages are 59.6 V, 60.4 V, 60.4 V, and 60.46 V when the frequencies are 0.5 Hz, 1 Hz, 1.5 Hz, and 2 Hz, respectively. This shows that the output voltage of FL-TENG is very stable. Figure 4b shows the response of the FL-TENG at different frequencies. The response of the FL-TENG is calculated by the following equation:
where V0 and Vi are the output voltage when the frequency is 1 Hz and the output voltage when the frequency is another frequency. When the frequency is 0.5 Hz, 1 Hz, 1.5 Hz, and 2 Hz, the responses of FL-TENG are 0%, 0.01%, 0.01%, and 0.01%, respectively. The data results show that the change in the magnitude of the frequency does not cause a significant change in the output voltage when the angle changes a certain amount, and the output voltage is stable. This indicates that the FL-TENG has excellent performance for human motion monitoring and can monitor various human motions sensitively and accurately. Figure 4c shows the output voltage of FL-TENG at different bending angles at the same frequency (1Hz), and the frictional electric output voltage is 10, 14.4, 18.8, and 23.6 V when the bending angles are 1.9°, 2.4°, 2.9°, and 3.4°, respectively. Figure 4d shows the linear relationship between the FL-TENG bending angle and the output voltage. The Pearson correlation coefficient is 0.99977, which indicates a significant linear relationship between angle and voltage. The equation is:

Figure 4.
Output performance of FL-TENG. (a) The output voltage of FL-TENG at different frequencies with the same bending angle. (b) Voltage and response of FL-TENG at different frequencies. (c) The output voltage of FL-TENG at different bending angles at the same frequency. (d) The output voltage of FL-TENG under different bending angles at the same frequency; the linear relationship between bending angle and voltage. (e) The voltage and power of FL-TENG under different load resistance. (f) FL-TENG charging to 1 μF, 2.2 μF, 4.7 μF capacitors. (g) Durability test of FL-TENG. (h) Details of the endurance test.
From the calculation formula, the angular sensitivity of the friction electric sensor device is 9.04 V/degree. Figure 4e shows the output voltage and output power of the FL-TENG with different load resistances. It can be seen that the output voltage increases with the increases in load resistance, and the power of FL-TENG reaches the maximum of 58.9 μW when the load resistance is 6 MΩ, so it can be known that the resistance of FL-TENG is 6 MΩ. Because the contact area of the frictional electrical parts is 10.2 cm2, the power density of FL-TENG can be calculated as 5.77 μW/cm2. Figure 4f shows that the FL-TENG charges different capacitors, and when the bending angle and frequency are kept fixed, the FL-TENG charges 1 μF, 2.2 μF, and 4.7 μF capacitors for 52 s, which can be charged to 1.7 V, 1.54 V, and 1.1 V. This shows that the FL-TENG can be used as both a sensor and an energy collector to convert the mechanical energy of motion into electrical energy for self-powering. Figure 4g shows the durability test of the FL-TENG. After 2800 s of testing, the FL-TENG still maintains a stable output. Figure 4h illustrates the details of the durability test, showing that the device has long working stability and ensures the accuracy of sense.
The FL-TENG can be used not only as a sensor for human motion monitoring but also as an energy harvesting device. The efficiency of the FL-TENG is further improved by collecting, converting, and storing mechanical energy as electrical energy for optional use. Figure 5a shows the power management equivalent circuit of the FL-TENG, which consists of a capacitor, a bridge, and a load. The operating state can be switched between the FL-TENG and the load, corresponding to the charging and discharging modes, respectively. As shown in Figure 5b, we attached the two friction layers of the FL-TENG to a nitrile glove and charged the commercial calculator by clapping our hands. The starting state is shown in Figure 5b(i). The charging switch was turned on after charging the capacitor for some time by continuously clapping our hands, and the commercial calculator was charged and lit up, as shown in Figure 5b(ii). Figure 5b(iii) shows the actual charging and discharging process of the commercial calculator (Supplementary Video S1). In today’s world, with a global population of over 8 billion, people are creating huge amounts of energy while demanding more of it. Human movement mechanical energy as a green and sustainable energy source provides more options to solve the energy crisis. As shown in Figure 5c, we can obtain a 241 V instantaneous voltage output by a simple clapping action (Supplementary Video S2), and Figure 5c(i,ii) show the clapping mechanical energy harvesting and output voltage, respectively. As shown in Figure 5d, we further demonstrate the feasibility of converting mechanical energy collection into electrical energy supply with the FL-TENG, where 122 LEDs are easily lit by a common clapping action (Supplementary Video S3). This makes it clear that there is a huge amount of green energy latent in people’s daily activities, which is almost ignored in daily life, thus making the mechanical energy wasted in the form of waste energy. The fabrication of FL-TENG provides a reference solution to alleviate the energy problem and collect biomechanical energy.
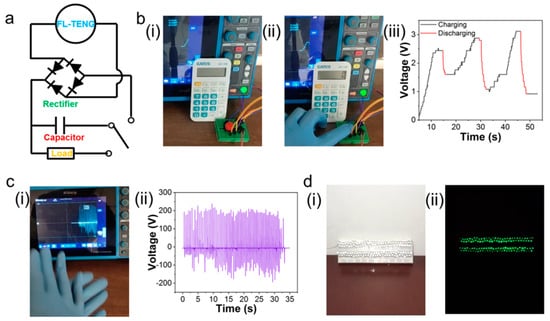
Figure 5.
Feasibility of FL-TENG as a power supply. (a) Equivalent circuit of an FL-TENG-based power system equipped with capacitors and external loads. (b) Energy storage and charging of a commercial calculator by FL-TENG. (c) Biomechanical energy harvesting and output voltage of FL-TENG. (d) FL-TENG as power supply to light up 122 green LEDs.
Nowadays, while people are concerned about energy issues, they are also starting to focus on their physical health. To pursue a healthy lifestyle or avoid physical illness, more and more people are participating in sports such as table tennis and tennis. However, many people who are new to a sport have a poor understanding of the technique, and the lack of formal technical instruction can cause joint injuries. Some of these joint injuries are irreversible, such as triangular cartilage disc injuries caused by irregular table tennis swings, and wrist tendinitis, lumbar strain, and knee meniscus wear caused by irregular tennis swings. The occurrence of sports injuries is contrary to the original intention of pursuing health, so the judgment and correction of wrong movements are particularly important. Here, we present the design of an FL-TENG-based wireless intelligent motion correction system that combines triboelectric nano-generation technology with a wireless intelligent host signal processing and visualization system. Figure 6a shows the output voltages of the canonical table tennis attack technique and tennis swing action, where Figure 6a(i) shows the state photo of the wrist for the canonical table tennis attack technique and Figure 6a(ii) shows the state photo of the wrist for the canonical tennis swing. Figure 6b shows the output voltages for the incorrect table tennis attack technique and tennis swing action. Whereas Figure 6b(i) depicts the state of the wrist for the incorrect table tennis attack technique, Figure 6b(ii) depicts the state of the wrist for the incorrect tennis swing. By comparing the output voltages of Figure 6a,b, it can be seen that the voltage produced by the standardized technical action is significantly smaller than that produced by the incorrect action, which is consistent with the stable wrist of the standardized technical action and the wide range of wrist movement of the incorrect technical action. Figure 6c shows the working form of the FL-TENG-based wireless intelligent motion error correction system. The circuit diagram of the wireless intelligent error correction system is shown in Supplementary Figure S1. The FL-TENG is attached to the wrist, and when the ping-pong paddle is swung, the friction device detects and obtains the wrist motion data and transmits the data wirelessly through the transmitter of the error correction system to the data receiver. The host computer signal processing and visualization system processes and evaluates the collected data in real time, and displays the evaluation results (Video S4). The wireless intelligent motion error correction system will be the first to detect incorrect movements during the initial stages of learning sports skills and will assist people in correcting technical movements during the generalization stage of sports skill formation, preventing sports injuries caused by incorrect technical movements. The combination of FL-TENG and a wireless intelligent motion error correction system ensures that people’s health and safety are protected during physical activity.
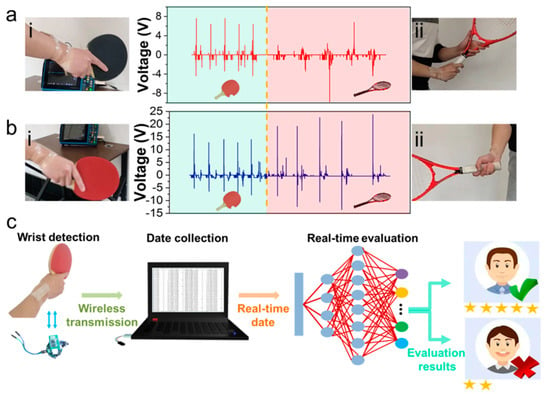
Figure 6.
The application of FL-TENG in wireless intelligent motion error correction system. (a) The output voltage of the canonical table tennis attack technique with tennis swing action. (b) The output voltage of the incorrect table tennis attack technique and tennis swing action. (c) The working process of wireless intelligent motion error correction system.
4. Conclusions
We fabricated a flexible and lightweight frictional electric nanogenerator (FL-TENG), which uses polyurethane (PU) film and polytetrafluoroethylene (PTFE) film as frictional layers, polydimethylsiloxane (PDMS) as a support layer, and hydrogel as the electrode. FL-TENG achieves sensitive monitoring of bending angle and frequency changes using contact separation mode. FL-TENG enables the conversion of biomechanical energy to electrical energy while also providing self-power and sensing. FL-TENG is a self-powered sensor that monitors people’s fitness activities and enables error correction of movement behavior by combining it with an intelligent host computer signal processing and visualization system. The system continuously collects mechanical energy from human movement and evaluates movement parameters to help people develop correct movement techniques and avoid physical injuries caused by incorrect movement techniques. This work opens up further possibilities for the overall development of sustainable energy harvesting and storage devices and intelligent healthcare for monitoring human movement behavior.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/su14116944/s1, Figure S1: Comparison test of tensile properties of hydrogel electrode and copper electrode. Figure S2: The circuit diagram of the wireless intelligent error correction system. Video S1: FL-TENG charges commercial calculators. Video S2: Biomechanical energy harvesting by FL-TENG. Video S3: Clap light up 122 LED lights process. Video S4: The display of the wireless intelligent motion error correction system.
Author Contributions
Data curation, formal analysis, writing—original draft, supervision, resources, and writing—review and editing, Y.M.; data curation, formal analysis, visualization, and investigation, F.S. and Y.Z.; investigation and visualization, C.J.; formal analysis and visualization, T.Z.; software and visualization, C.H.; conceptualization, C.L.; conceptualization, N.B.; supervision, writing—review and editing, T.C.; supervision, resources, and writing—review and editing, S.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
We thank the school of science and the school of information of Northeastern University for their beneficial discussion on this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Coccia, M. How (Un)sustainable Environments Are Related to the Diffusion of COVID-19: The Relation between Coronavirus Disease 2019, Air Pollution, Wind Resource and Energy. Sustainability 2020, 12, 9709. [Google Scholar] [CrossRef]
- Gurieff, N.; Green, D.; Koskinen, I.; Lipson, M.; Baldry, M.; Maddocks, A.; Menictas, C.; Noack, J.; Moghtaderi, B.; Doroodchi, E. Healthy Power: Reimagining Hospitals as Sustainable Energy Hubs. Sustainability 2020, 12, 8554. [Google Scholar] [CrossRef]
- Liu, R.; Dong, X.; Zhang, P.; Zhang, Y.; Wang, X.; Gao, Y. Study on the Sustainable Development of an Arid Basin Based on the Coupling Process of Ecosystem Health and Human Wellbeing Under Land Use Change-A Case Study in the Manas River Basin, Xinjiang, China. Sustainability 2020, 12, 1201. [Google Scholar] [CrossRef] [Green Version]
- Harte, J. Human population as a dynamic factor in environmental degradation. Popul. Environ. 2007, 28, 223–236. [Google Scholar] [CrossRef]
- Staudt, A.; Leidner, A.K.; Howard, J.; Brauman, K.A.; Dukes, J.S.; Hansen, L.J.; Paukert, C.; Sabo, J.; Solorzano, L.A. The added complications of climate change: Understanding and managing biodiversity and ecosystems. Front. Ecol. Environ. 2013, 11, 494–501. [Google Scholar] [CrossRef]
- Scovronick, N.; Budolfson, M.B.; Dennig, F.; Fleurbaey, M.; Siebert, A.; Socolow, R.H.; Spears, D.; Wagner, F. Impact of population growth and population ethics on climate change mitigation policy. Proc. Natl. Acad. Sci. USA 2017, 114, 12338–12343. [Google Scholar] [CrossRef] [Green Version]
- Cho, J.; Kang, H.; Yoon, J.H. Exercise Strategies for the Prevention and Treatment of Non-alcoholic Fatty Liver Disease. J. Obes. Metab. Syndr. 2015, 24, 190–196. [Google Scholar] [CrossRef] [Green Version]
- Di Raimondo, D.; Musiari, G.; Miceli, G.; Arnao, V.; Pinto, A. Preventive and Therapeutic Role of Muscle Contraction Against Chronic Diseases. Curr. Pharm. Design. 2016, 22, 4686–4699. [Google Scholar] [CrossRef] [PubMed]
- Donnelly, J.E.; Smith, B.; Jacobsen, D.J.; Kirk, E.; DuBose, K.; Hyder, M.; Bailey, B.; Washburn, R. The role of exercise for weight loss and maintenance. Best Pract. Res. Clin. Gastroenterol. 2004, 18, 1009–1029. [Google Scholar] [CrossRef]
- Knight, E.; Stuckey, M.I.; Petrella, R.J. Health Promotion Through Primary Care: Enhancing Self-Management with Activity Prescription and mHealth. Phys. Sportsmed. 2014, 42, 90–99. [Google Scholar] [CrossRef]
- Lakka, T.A.; Laaksonen, D.E. Physical activity in prevention and treatment of the metabolic syndrome. Appl. Physiol. Nutr. Metab. 2007, 32, 76–88. [Google Scholar] [CrossRef]
- Vuori, I.M. Role of Primary Health Care in Physical Activity Promotion. Ger. J. Sports Med. 2013, 64, 176–182. [Google Scholar] [CrossRef] [Green Version]
- Heran, B.S.; Chen, J.M.H.; Ebrahim, S.; Moxham, T.; Oldridge, N.; Rees, K.; Thompson, D.R.; Taylor, R.S. Exercise-based cardiac rehabilitation for coronary heart disease. Cochrane Database Syst. 2011, 7, CD001800. [Google Scholar]
- Martinez-Velilla, N.; Casas-Herrero, A.; Zambom-Ferraresi, F.; Saez de Asteasu, M.L.; Lucia, A.; Galbete, A.; Garcia-Baztan, A.; Alonso-Renedo, J.; Gonzalez-Glaria, B.; Gonzalo-Lazaro, M.; et al. Effect of Exercise Intervention on Functional Decline in very Elderly Patients During Acute Hospitalization A Randomized Clinical Trial. JAMA Intern. Med. 2019, 179, 28–36. [Google Scholar] [CrossRef] [PubMed]
- Fan, F.-R.; Tian, Z.-Q.; Wang, Z.L. Flexible triboelectric generator! Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Z.L. Reviving Vibration Energy Harvesting and Self-Powered Sensing by a Triboelectric Nanogenerator. Joule 2017, 1, 480–521. [Google Scholar] [CrossRef]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-Powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric Nanogenerators as New Energy Technology for Self-Powered Systems and as Active Mechanical and Chemical Sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L. Triboelectric nanogenerators as new energy technology and self-powered sensors—Principles, problems and perspectives. Faraday Discuss. 2014, 176, 447–458. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric Nanogenerator: A Foundation of the Energy for the New Era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Zhu, G.; Lin, Z.-H.; Jing, Q.; Bai, P.; Pan, C.; Yang, Y.; Zhou, Y.; Wang, Z.L. Toward Large-Scale Energy Harvesting by a Nanoparticle-Enhanced Triboelectric Nanogenerator. Nano Lett. 2013, 13, 847–853. [Google Scholar] [CrossRef]
- Sun, F.; Zhu, Y.; Jia, C.; Ouyang, B.; Zhao, T.; Li, C.; Ba, N.; Li, X.; Chen, S.; Che, T.; et al. A Flexible Lightweight Triboelectric Nanogenerator for Protector and Scoring System in Taekwondo Competition Monitoring. Electronics 2022, 11, 1306. [Google Scholar] [CrossRef]
- Chen, B.; Yang, Y.; Wang, Z.L. Scavenging Wind Energy by Triboelectric Nanogenerators. Adv. Energy Mater. 2018, 8, 1702649. [Google Scholar] [CrossRef]
- Chen, J.; Yang, J.; Li, Z.; Fan, X.; Zi, Y.; Jing, Q.; Guo, H.; Wen, Z.; Pradel, K.C.; Niu, S.; et al. Networks of Triboelectric Nanogenerators for Harvesting Water Wave Energy: A Potential Approach toward Blue Energy. ACS Nano 2015, 9, 3324–3331. [Google Scholar] [CrossRef]
- Chen, P.; An, J.; Shu, S.; Cheng, R.; Nie, J.; Jiang, T.; Wang, Z.L. Super-Durable, Low-Wear, and High-Performance Fur-Brush Triboelectric Nanogenerator for Wind and Water Energy Harvesting for Smart Agriculture. Adv. Energy Mater. 2021, 11, 2003066. [Google Scholar] [CrossRef]
- Cheng, P.; Guo, H.; Wen, Z.; Zhang, C.; Yin, X.; Li, X.; Liu, D.; Song, W.; Sun, X.; Wang, J.; et al. Largely enhanced triboelectric nanogenerator for efficient harvesting of water wave energy by soft contacted structure. Nano Energy 2019, 57, 432–439. [Google Scholar] [CrossRef]
- Liang, X.; Jiang, T.; Liu, G.; Feng, Y.; Zhang, C.; Wang, Z.L. Spherical triboelectric nanogenerator integrated with power management module for harvesting multidirectional water wave energy. Energy Environ. Sci. 2020, 13, 277–285. [Google Scholar] [CrossRef]
- Xu, M.; Zhao, T.; Wang, C.; Zhang, S.L.; Li, Z.; Pan, X.; Wang, Z.L. High Power Density Tower-like Triboelectric Nanogenerator for Harvesting Arbitrary Directional Water Wave Energy. ACS Nano 2019, 13, 1932–1939. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, G.; Zhang, H.; Chen, J.; Zhong, X.; Lin, Z.-H.; Su, Y.; Bai, P.; Wen, X.; Wang, Z.L. Triboelectric Nanogenerator for Harvesting Wind Energy and as Self-Powered Wind Vector Sensor System. ACS Nano 2013, 7, 9461–9468. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, B.; Chen, J.; Jin, L.; Deng, W.; Tang, J.; Zhang, H.; Pan, H.; Zhu, M.; Yang, W.; et al. Lawn Structured Triboelectric Nanogenerators for Scavenging Sweeping Wind Energy on Rooftops. Adv. Mater. 2016, 28, 1650–1656. [Google Scholar] [CrossRef] [PubMed]
- Niu, S.; Wang, X.; Yi, F.; Zhou, Y.S.; Wang, Z.L. A universal self-charging system driven by random biomechanical energy for sustainable operation of mobile electronics. Nat. Commun. 2015, 6, 8975. [Google Scholar] [CrossRef] [PubMed]
- Chaudhary, P.; Azad, P. Energy Harvesting from Human Biomechanical Energy for Health-monitoring Devices. IETE J. Res. 2021, 67, 74–81. [Google Scholar] [CrossRef]
- He, M.; Du, W.; Feng, Y.; Li, S.; Wang, W.; Zhang, X.; Yu, A.; Wan, L.; Zhai, J. Flexible and stretchable triboelectric nanogenerator fabric for biomechanical energy harvesting and self-powered dual-mode human motion monitoring. Nano Energy 2021, 86, 106058. [Google Scholar] [CrossRef]
- Kim, J.-N.; Lee, J.; Lee, H.; Oh, I.-K. Stretchable and self-healable catechol-chitosan-diatom hydrogel for triboelectric generator and self-powered tremor sensor targeting at Parkinson disease. Nano Energy 2021, 82, 105705. [Google Scholar] [CrossRef]
- Lin, Z.; Wu, Z.; Zhang, B.; Wang, Y.-C.; Guo, H.; Liu, G.; Chen, C.; Chen, Y.; Yang, J.; Wang, Z.L. A Triboelectric Nanogenerator-Based Smart Insole for Multifunctional Gait Monitoring. Adv. Mater. Technol. 2019, 4, 1800360. [Google Scholar] [CrossRef]
- Yang, D.; Ni, Y.; Kong, X.; Li, S.; Chen, X.; Zhang, L.; Wang, Z.L. Self-Healing and Elastic Triboelectric Nanogenerators for Muscle Motion Monitoring and Photothermal Treatment. ACS Nano 2021, 15, 14653–14661. [Google Scholar] [CrossRef]
- Yu, J.; Hou, X.; He, J.; Cui, M.; Wang, C.; Geng, W.; Mu, J.; Han, B.; Chou, X. Ultra-flexible and high-sensitive triboelectric nanogenerator as electronic skin for self-powered human physiological signal monitoring. Nano Energy 2020, 69, 104437. [Google Scholar] [CrossRef]
- Mao, Y.; Zhu, Y.; Zhao, T.; Jia, C.; Bian, M.; Li, X.; Liu, Y.; Liu, B. A Portable and Flexible Self-Powered Multifunctional Sensor for Real-Time Monitoring in Swimming. Biosensors 2021, 11, 147. [Google Scholar] [CrossRef]
- Zhu, Y.; Sun, F.; Jia, C.; Zhao, T.; Mao, Y. A Stretchable and Self-Healing Hybrid Nano-Generator for Human Motion Monitoring. Nanomaterials 2022, 12, 104. [Google Scholar] [CrossRef]
- Jia, C.; Zhu, Y.; Sun, F.; Zhao, T.; Xing, R.; Mao, Y.; Zhao, C. A Flexible and Stretchable Self-Powered Nanogenerator in Basketball Passing Technology Monitoring. Electronics 2021, 10, 2584. [Google Scholar] [CrossRef]
- Zhao, T.; Fu, Y.; He, H.; Dong, C.; Zhang, L.; Zeng, H.; Xing, L.; Xue, X. Self-powered gustation electronic skin for mimicking taste buds based on piezoelectric-enzymatic reaction coupling process. Nanotechnology 2018, 29, 075501. [Google Scholar] [CrossRef]
- Kwak, M.S.; Peddigari, M.; Lee, H.Y.; Min, Y.; Park, K.-I.; Kim, J.-H.; Yoon, W.-H.; Ryu, J.; Yi, S.N.; Jang, J.; et al. Exceeding 50 mW RMS-Output Magneto-Mechano-Electric Generator by Hybridizing Piezoelectric and Electromagnetic Induction Effects. Adv. Funct. Mater. 2022, 2112028. [Google Scholar] [CrossRef]
- Zheng, Q.; Liu, X.; Xu, H.; Cheung, M.-S.; Choi, Y.-W.; Huang, H.-C.; Lei, H.-Y.; Shen, X.; Wang, Z.; Wu, Y.; et al. Sliced graphene foam films for dual-functional wearable strain sensors and switches. Nanoscale Horiz. 2018, 3, 35–44. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, T.; Cai, J.; Xu, L.; He, T.; Wang, T.; Tian, Y.; Li, L.; Peng, Y.; Lee, C. Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications. Adv. Sci. 2022, 9, 2103694. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).