
Direct Torque Control with Space Vector Modulation (DTC-SVM) with Adaptive Fractional-Order Sliding Mode: A Path Towards Improved Electric Vehicle Propulsion


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
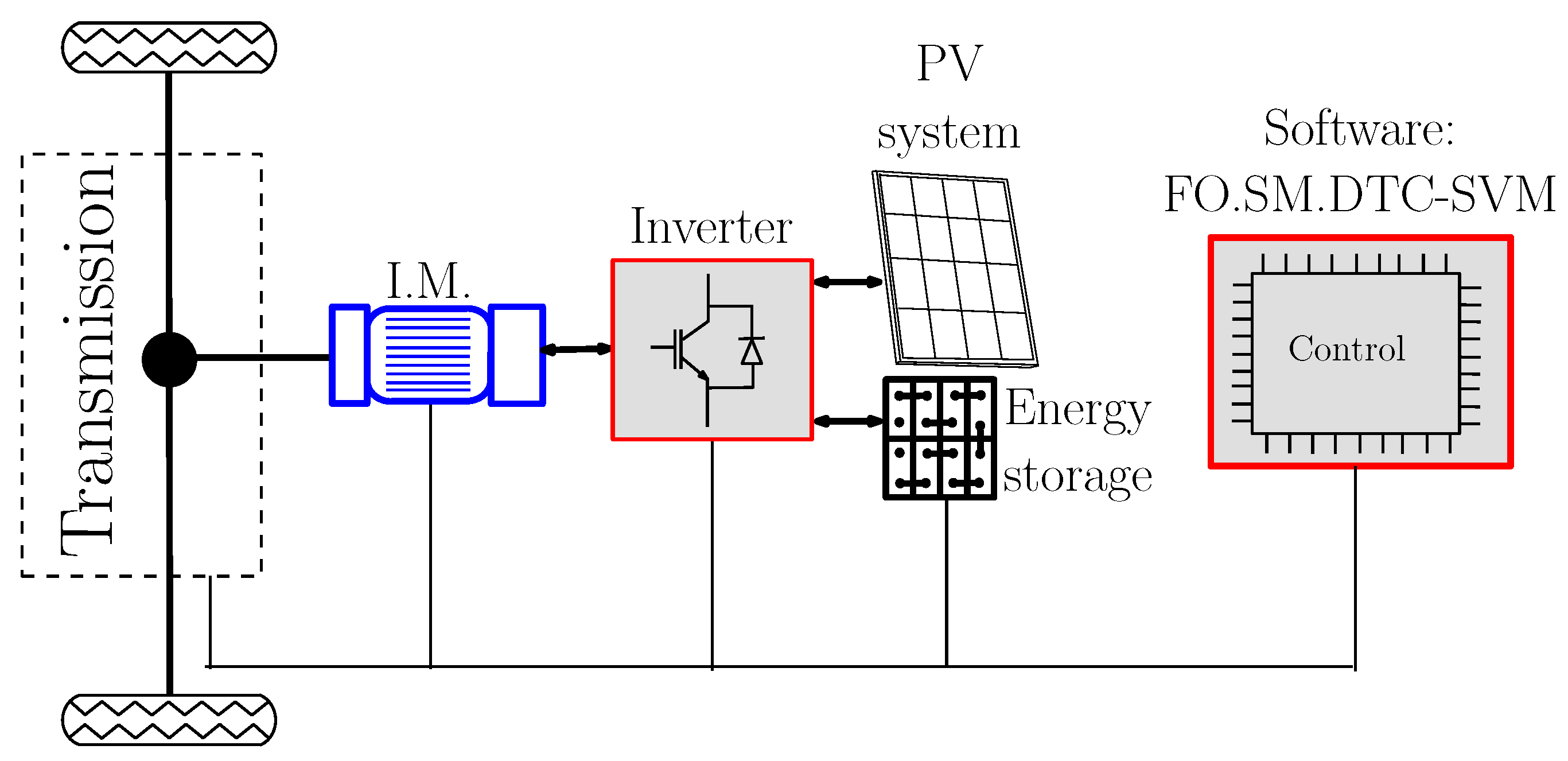
2. Fundamentals of Electric Vehicle Propulsion
- Rolling resistance (): This force opposes the vehicle’s movement due to the deformation of the tires and the friction between them and the road. It is proportional to the vehicle’s weight and the rolling resistance coefficient (), which is typically around 0.005 for tires in electric vehicles. Minimizing this resistance is key to improving energy efficiency.
- Aerodynamic drag (): This force opposes motion as a result of air resistance. It depends on the air density (), the frontal surface area of the vehicle (A), the drag coefficient (), and the square of the vehicle’s velocity. Reducing aerodynamic drag is especially important for fuel efficiency at higher speeds.
- Hill-climbing force (): This force counters the pull of gravity when driving uphill, where represents the slope angle. Larger slopes and heavier vehicles demand greater force to overcome this resistance.
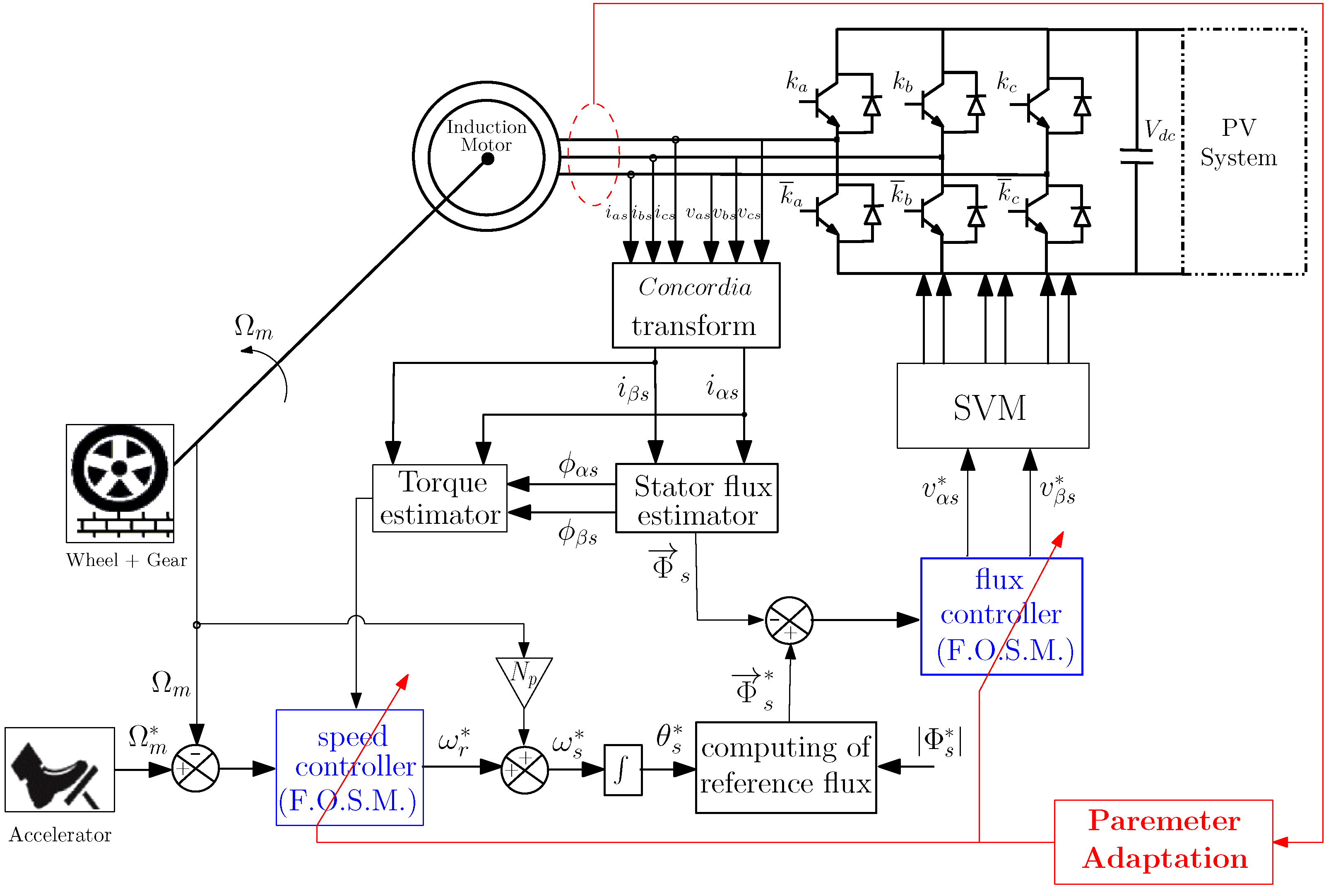
3. Modeling Induction Machine with DTC-SVM
3.1. Space Vector Representation of Induction Motor Dynamics
3.2. DTC-SVM Control Based on FO-SM
4. Adaptive FO-DTC-SVM Proposed Control Approach
4.1. Adaptive Speed Controller
4.2. Adaptive Flux Controller
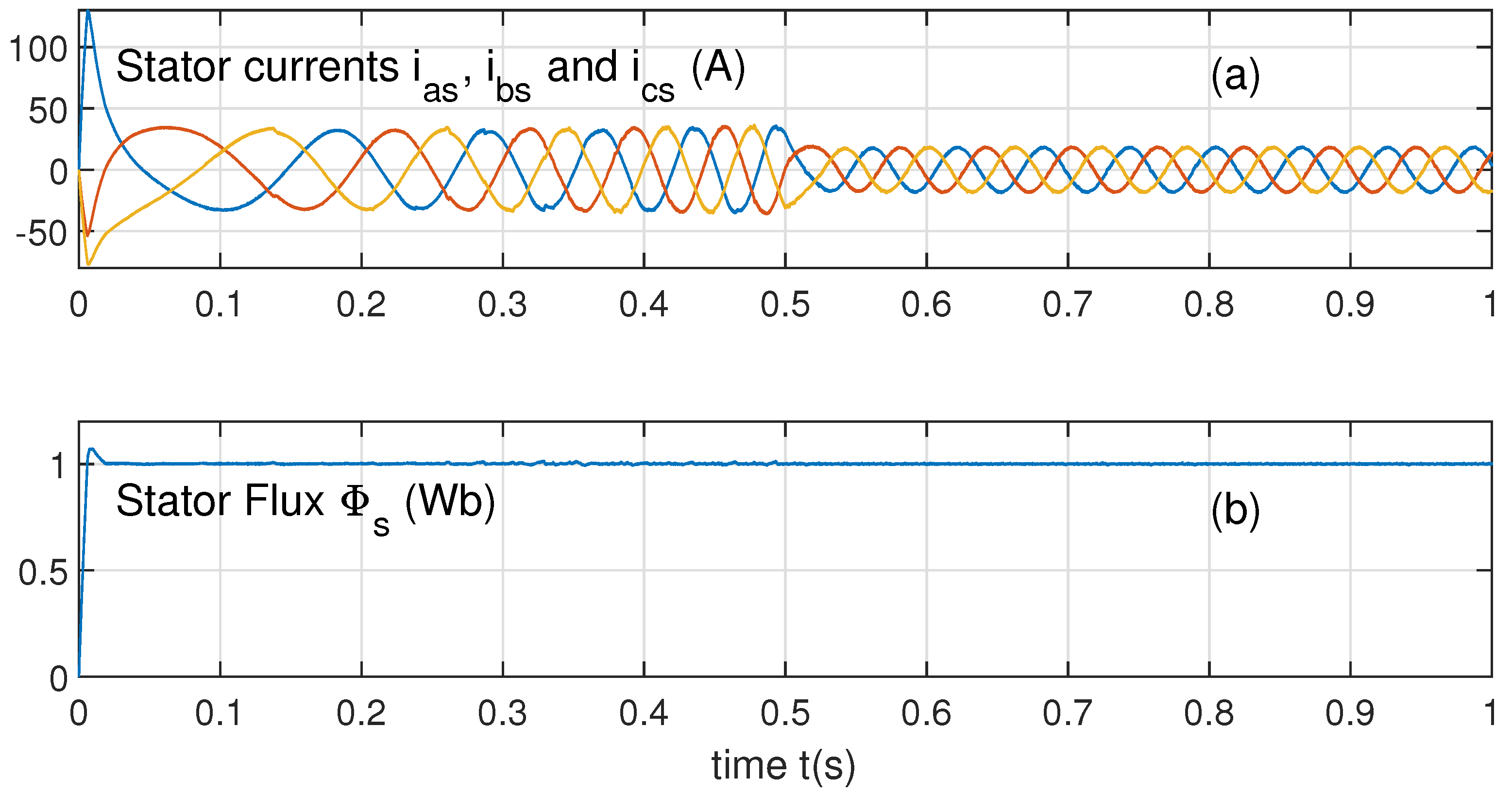
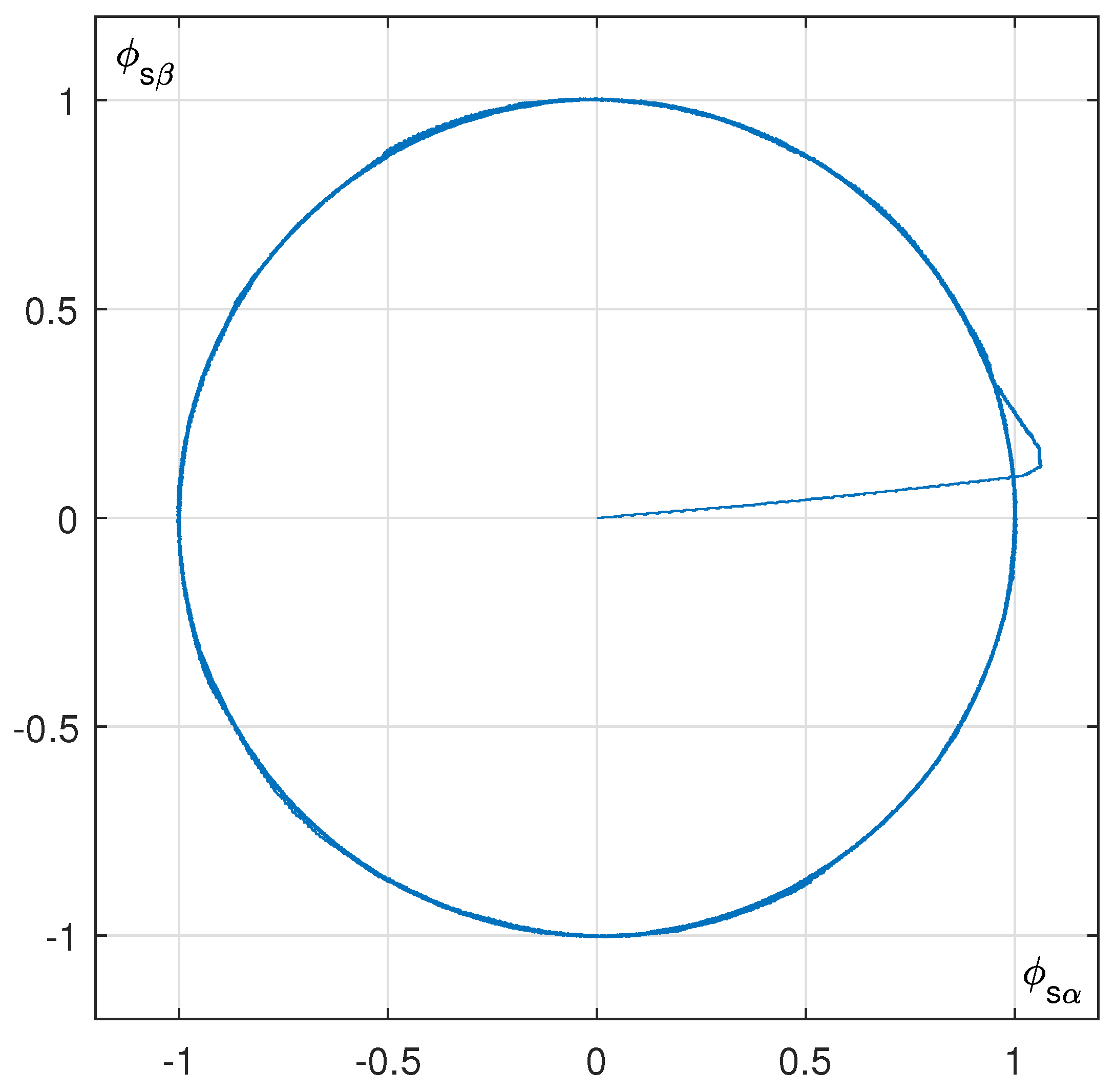
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Talla, J.; Leu, V.Q.; Šmídl, V.; Peroutka, Z. Adaptive speed control of induction motor drive with inaccurate model. IEEE Trans. Ind. Electron. 2018, 65, 8532–8542. [Google Scholar] [CrossRef]
- Xu, W.; Jiang, Y.; Mu, C.; Blaabjerg, F. Improved nonlinear flux observer-based second-order SOIFO for PMSMsensorless control. IEEE Trans. Power Electron. 2019, 34, 565–579. [Google Scholar] [CrossRef]
- Wang, B.; Luo, C.; Yu, Y.; Wang, G.; Xu, D. Antidisturbance speed control for induction machine drives using high-order fast terminal slidingmode load torque observer. IEEE Trans. Power Electron. 2018, 33, 7927–7937. [Google Scholar] [CrossRef]
- Mwasilu, F.; Jung, J.-W. Enhanced fault-tolerant control of interior PMSMs based on an adaptive EKF for EV traction applications. IEEE Trans. Power Electron. 2016, 31, 5746–5758. [Google Scholar] [CrossRef]
- Du, G.; Xu, W.; Zhu, J.; Huang, N. Effects of design parameters on the multiphysics performance of high-speed permanent magnet machines. IEEE Trans. Ind. Electron. 2020, 67, 3472–3483. [Google Scholar] [CrossRef]
- Mani, P.; Rajan, R.; Shanmugam, L.; Joo, Y.H. Adaptive fractional fuzzy integral sliding mode control for PMSM model. IEEE Trans. Fuzzy Syst. 2019, 27, 1674–1686. [Google Scholar] [CrossRef]
- Xu, D.; Huang, J.; Su, X.; Shi, P. Adaptive command-filtered fuzzy backstepping control for linear inductionmotor with unknown end effect. Inf. Sci. 2019, 477, 118–131. [Google Scholar] [CrossRef]
- Ammar, A.; Benakcha, A.; Bourek, A. Adaptive MRAC-based direct torque control with SVM for sensorless induction motor using adaptive observer. Int. J. Adv. Manuf. Technol. 2017, 91, 1631–1641. [Google Scholar] [CrossRef]
- Du, H.; Chen, X.; Wen, G.; Yu, X.; Lü, J. Discrete-time fast terminal sliding mode control for permanent magnet linear motor. IEEE Trans. Ind. Electron. 2018, 65, 9916–9927. [Google Scholar] [CrossRef]
- Xu, W.; Zou, J.; Mu, C. Improved model predictive current control strategy-based rotor flux for linear inductionmachines. IEEE Trans. Appl. Supercond. 2016, 26, 0608605. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Dong, W.; Chen, B.; Lin, C. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 640–645. [Google Scholar] [CrossRef] [PubMed]
- Sathishkumar, H.; Parthasarathy, S. A novel neural network intelligent controller for vector controlled induction motor drive. Energy Procedia 2017, 138, 692–697. [Google Scholar] [CrossRef]
- Junejo, A.K.; Xu, W.; Hashmani, A.A.; El-Sousy, F.F.; Habib, H.U.R.; Tang, Y.; Shahab, M.B.; Keerio, M.U.; Ismail, M.M. Novel fast terminal reaching law based composite speed control of PMSM drive system. IEEE Access 2022, 10, 82202–82213. [Google Scholar] [CrossRef]
- Liu, J.; Li, H.; Deng, Y. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control. IEEE Trans. Power Electron. 2018, 33, 3655–3671. [Google Scholar] [CrossRef]
- Yin, Z.; Gong, L.; Du, C.; Liu, J.; Zhong, Y. Integrated position and speed loops under sliding-mode control optimized by differential evolution algorithm for PMSM drives. IEEE Trans. Power Electron. 2019, 34, 8994–9005. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, W.; Mu, C.; Liu, Y. Improved deadbeat predictive current control combined sliding mode strategy for PMSM drive system. IEEE Trans. Veh. Technol. 2018, 67, 251–263. [Google Scholar] [CrossRef]
- Salem, F.B.; Derbel, N. Second-order Sliding-mode Control Approaches to Improve Low-speed Operation of Induction Machine under Direct Torque Control. Electr. Power Components Syst. (EPCS) 2016, 44, 1969–1980. [Google Scholar] [CrossRef]
- Salem, F.B.; Derbel, N. Direct Torque Control of Induction Motors Based on Discrete Space Vector Modulation Using Adaptive Sliding Mode Control. Electr. Power Components Syst. (EPCS) 2014, 42, 1598–1610. [Google Scholar] [CrossRef]
- Mao, J.; Li, H.; Zhou, Y.; Yang, L.; Huang, J. Direct speed composite control of SPMSM drive system. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 5120–5130. [Google Scholar] [CrossRef]
- Zhu, W.; Li, X.; Cao, X.; Li, Y.; Zhou, K. An improved modulation strategy without current zero-crossing distortion and control method for Vienna rectifier. IEEE Trans. Power Electron. 2023, 38, 15199–15213. [Google Scholar] [CrossRef]
- Çavus, B.; Aktas, M. A New Adaptive Terminal Sliding Mode Speed Control in Flux Weakening Region for DTC Controlled Induction Motor Drive. IEEE Trans. Power Electron. 2024, 39, 449–458. [Google Scholar] [CrossRef]
- Zheng, B.-C.; Park, J.H. Slidingmode control design for linear systems subject to quantization parameter mismatch. J. Franklin Inst. 2016, 353, 37–53. [Google Scholar] [CrossRef]
- Argha, A.; Li, L.; Su, S.W.; Nguyen, H. On LMI-based sliding mode control for uncertain discrete-time systems. J. Franklin Inst. 2016, 353, 3857–3875. [Google Scholar] [CrossRef]
- Radwan, A.M.; Mahmoud, A.S.; Emira, A.; Sayed, M.A.E. Fractional-Order Sliding Mode Control; Springer: New York, NY, USA, 2018. [Google Scholar]
- Kumar, S.; Pandey, S.K.; Saxena, A.K. Fractional-Order Sliding Mode Control for Induction Motor Drives; Springer: New York, NY, USA, 2021. [Google Scholar]
- Klerk, M.L.D.; Saha, A.K. Performance analysis of DTC-SVM in a complete traction motor control mechanism for a battery electric vehicle. Heliyon 2022, 8, e09265. [Google Scholar] [CrossRef]
- Gudey, S.; Malla, M.; Jasthi, K.; Gampa, S. Direct torque control of an induction motor using fractional-order sliding mode control technique for quick response and reduced torque ripple. World Electr. Veh. J. 2023, 14, 137. [Google Scholar] [CrossRef]
- Nosheen, T.; Ali, A.; Chaudhry, M.U.; Nazarenko, D.; Shaikh, I.u.H.; Bolshev, V.; Iqbal, M.M.; Khalid, S.; Panchenko, V. A Fractional Order Controller for Sensorless Speed Control of an Induction Motor. Energies 2023, 16, 1901. [Google Scholar] [CrossRef]
- Ben Salem, F.; Turky, M.A.; Derbel, N. Enhanced Control Technique for Induction Motor Drives in Electric Vehicles: A Fractional-Order Sliding Mode Approach with DTC-SVM. Energies 2024, 17, 4340. [Google Scholar] [CrossRef]
- Qing, W.; Pan, B.; Hou, Y.; Lu, S.; Zhang, W. Fractional-Order Sliding Mode Control Method for a Class of Integer-Order Nonlinear Systems. Aerospace 2022, 9, 616. [Google Scholar] [CrossRef]
- Salem, F.B.; Masmoudi, A. A Comparative Analysis of the Inverter Switching Frequency in Takahashi DTC Strategy. Int. J. Comput. Math. Electr. Electron. Eng. (COMPEL) 2007, 26, 148–166. [Google Scholar] [CrossRef]
- Derbel, N.; Zhu, Q. Modeling, Identification and Control Methods in Renewable Energy Systems; Springer Book: New York, NY, USA, 2019. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben Salem, F.; Almousa, M.T.; Derbel, N. Direct Torque Control with Space Vector Modulation (DTC-SVM) with Adaptive Fractional-Order Sliding Mode: A Path Towards Improved Electric Vehicle Propulsion. World Electr. Veh. J. 2024, 15, 563. https://doi.org/10.3390/wevj15120563
Ben Salem F, Almousa MT, Derbel N. Direct Torque Control with Space Vector Modulation (DTC-SVM) with Adaptive Fractional-Order Sliding Mode: A Path Towards Improved Electric Vehicle Propulsion. World Electric Vehicle Journal. 2024; 15(12):563. https://doi.org/10.3390/wevj15120563
Chicago/Turabian StyleBen Salem, Fatma, Motab Turki Almousa, and Nabil Derbel. 2024. "Direct Torque Control with Space Vector Modulation (DTC-SVM) with Adaptive Fractional-Order Sliding Mode: A Path Towards Improved Electric Vehicle Propulsion" World Electric Vehicle Journal 15, no. 12: 563. https://doi.org/10.3390/wevj15120563
APA StyleBen Salem, F., Almousa, M. T., & Derbel, N. (2024). Direct Torque Control with Space Vector Modulation (DTC-SVM) with Adaptive Fractional-Order Sliding Mode: A Path Towards Improved Electric Vehicle Propulsion. World Electric Vehicle Journal, 15(12), 563. https://doi.org/10.3390/wevj15120563