Abstract
Significant improvements in the forest-based industrial sector are expected due to increased digitalization; however, examples of practical implementations remain limited. This study explores the use of an automated algorithm to estimate truckload volumes based on 3D point cloud data acquired using two different LiDAR scanning platforms. This research compares the performance of a professional mobile laser scanning (MLS GeoSLAM) platform and a smartphone-based iPhone LiDAR system. A total of 48 truckloads were measured using a combination of manual, factory-based, and digital approaches. Accuracy was evaluated using standard error metrics, including the mean absolute error (MAE) and root mean square error (RMSE), with manual or factory references used as benchmarks. The results showed a strong correlation and no significant differences between the algorithmic and manual measurements when using the MLS platform (MAE = 2.06 m3; RMSE = 2.46 m3). For the iPhone platform, the results showed higher deviations and significant overestimation compared to the factory reference (MAE = 3.29 m3; RMSE = 3.60 m3). Despite these differences, the iPhone platform offers real-time acquisition and low-cost deployment. These findings highlight the trade-offs between precision and operational efficiency and support the adoption of automated measurement tools in timber supply chains.
1. Introduction
The forest-based supply chain encompasses a sequence of interlinked processes—ranging from wood procurement to harvesting, transportation, processing, and sales—each operating within spatial and temporal constraints shaped by local legal, technical, and economic factors [1,2]. These constraints impact supply chain performance, especially where the uptake of digital technologies remains low or inconsistent [3]. Although digitalization has introduced promising opportunities for process optimization, interconnectivity, and traceability, its implementation in forestry is often limited by sectoral inertia, high upfront costs, and gaps in technical training [4,5].
Timber transactions are typically based on quantitative and qualitative estimates. Depending on several factors such as the legal framework, accepted practices, local rules, and available technology, such estimates may be sourced through the use of manual or digital tools, and they may be linked spatially to places such as a forest stand, a forest road, a storage facility, a wood processing factory, or a customer [6]. Also, it is quite common to take the necessary measurements either on individual logs or on piles, where the latter option may provide an important economy of scale when using digital tools [6]. However, to ensure an information and data flow across the wood supply chain, the quantity and quality of the wood transported from the forest to factories or to customers also need to be accounted for, as this may be relevant to those engaged in sourcing their wood from several providers or to providers that have a diversified customer distribution portfolio.
Timber transactions are typically governed by volume estimates, which vary based on the measurement protocols, legal frameworks, and accepted industry standards [6]. Volume can be estimated on an individual log basis or for grouped log piles, with pile-based methods offering efficiencies when digital technologies are applied [6]. However, to ensure traceability and compliance—especially under frameworks such as the EU Regulation on Deforestation-Free Products (EUDR) and the Corporate Sustainability Due Diligence Directive (CSDDD)—accurate truckload volume measurement remains crucial [7,8]. This need becomes even more apparent in the context of sustainability, where resource accounting, transparency, and fair pricing depend on an accurate data flow throughout the supply chain [9]. In addition to their importance to logistics planning, fair pricing, and overall optimization of the supply chain, accurate timber truck measurements are critical to timber traceability in the actual context of sustainable forest management [10,11]. Manual methods were traditionally used in this measurement process, which was time-consuming, labor-intensive, and prone to human error [12,13]. In order to improve the efficiency, accuracy, and cost effectiveness, advanced technologies have been explored for automating timber truck measurements [14,15,16].
In recent years, automation and 3D point cloud processing have been increasingly adopted across industrial domains for object detection and measurement tasks [17,18,19]. In fields such as computer vision and robotics, deep learning algorithms have demonstrated remarkable success in automatic object detection and measurement [20]. These algorithms leverage the information from large labeled datasets and the capabilities of powerful neural network architectures to achieve impressive results. Additionally, advancements in 3D point cloud processing algorithms, such as segmentation and feature extraction, have enhanced the capabilities of automated measurement systems further [21]. Several industrial solutions already exist—including Loadmon, Microtec, Logmeter, and Timspect—which employ laser scanning or structured photogrammetry to provide near-real-time volume estimates [22,23,24]. These tools typically involve fixed installations and are integrated into processing yards or checkpoints. While effective, such systems can be cost-prohibitive for smaller stakeholders or mobile deployment scenarios [18].
The automation of measuring operations has the potential to considerably assist the forestry sector [5]. Automation promises a higher accuracy and speed, lower labor costs, fairness, and simplified processes in the wood sector by leveraging the possibilities of automatic data processing and 3D point cloud processing techniques [25]. While the automation of timber truck measurements brings numerous advantages, it also poses challenges and raises considerations. One of the key challenges is the accurate measurement of individual logs within a truckload. A truckload typically contains a large number of logs, each with varying shapes, sizes, and orientations [26]. Taking accurate measurements for each log is still difficult due to occlusions, interlocking, and irregularities in log positioning [22]. The current measurement systems offer important benefits, including time savings through real-time or near-real-time measurements and improved accuracy with 3D point cloud technology [26]. However, high prices and specialized maintenance may pose additional challenges, particularly for smaller operators or organizations with limited budgets [5], in addition to a low degree of process automation.
For measurement automation, algorithms need to be developed and trained with the main goal of accurately identifying and measuring individual logs considering their spatial relationships and potential occlusions [27]. In comparison, manual measurement is a time-consuming activity, particularly when all the logs within a truck need to be measured manually [14]. In addition, manual measurements require significant allocation of human resources, resulting in higher costs and delays [25]. Furthermore, the subjective nature of manual measurements causes discrepancies and inaccuracies, leading to disagreements among stakeholders, financial losses, and decreased supply chain efficiency. The traditional manual methods involve physical, direct-contact measurements for each log using tapes and calipers, which can be a laborious and error-prone process [28], while the digital options offer a faster alternative, capable of simultaneously measuring multiple logs from 3D point cloud data [29,30].
Recent advances in mobile scanning platforms—both professional (e.g., MLS GeoSLAM) and consumer-grade (e.g., iPhone LiDAR)—have opened opportunities for flexible, cost-effective data acquisition in the field [12]. These systems offer varying levels of precision and ease of use, with smartphone-based tools standing out due to their accessibility and intuitive interfaces. By facilitating real-time 3D data collection, they also support rapid feedback loops in logistics and inventory control [29]. Mobile scanners, equipped with advanced LiDAR technology and high-resolution cameras, offer the ability to quickly and accurately capture the geometric details of timber trucks [22,30]. These scanners can be mounted onto vehicles, allowing for on-the-go data collection during timber transportation. Similarly, smartphone-based scanners, some of which leverage LiDAR capabilities [6,12], enable individuals to capture 3D point cloud data, which may prove a cost-effective and accessible solution for truckload measurement. By simplifying and expediting the data acquisition process, these devices may enable real-time monitoring and measurement of truckloads, minimizing delays and optimizing the operational efficiency. The rapid acquisition of high-quality point cloud data is also compatible with the implementation of algorithms for automated measurement, enhancing accuracy and reliability. This way, the integration of mobile and smartphone-based scanners into existing workflows offers a seamless solution that can easily be adopted by forestry professionals and stakeholders [31].
This study addresses the gap between algorithm development and practical deployment by assessing a novel automated algorithm that processes 3D point clouds from both professional and smartphone-based platforms. Specifically, we aim to (1) develop and test an automated volume estimation algorithm for timber truckloads and (2) evaluate its performance using two data acquisition platforms and benchmark it against conventional measurements.
2. Materials and Methods
2.1. The Study Area, the Experimental Design, and the Data Collection
This study was conducted in 2022 at a large sawmilling facility located in central Romania (Brașov County), a region characterized by a mixed forest economy and established wood processing infrastructure. A total of 48 timber truckloads were measured using both manual/digital methods and automated scanning platforms under real-world conditions. Two independent comparative trials were designed:
- Trial 1 (T1): The evaluation of a professional mobile laser scanning (MLS GeoSLAM Zeb Revo Horizon—manufactured by GeoSLAM Ltd., headquartered in Nottingham (Ruddington), UK) platform, compared against detailed manual measurements for 28 truckloads;
- Trial 2 (T2): The evaluation of a smartphone-based iPhone 14 Pro Max LiDAR sensor, paired with the 3D Scanner App, Version 1.1.6 (https://3dscannerapp.com/, accessed on 30 July 2025), compared against the factory-installed Microtec system’s values for 20 truckloads.
Each trial was based on a different set of truckloads, due to logistical constraints and scanning device availability. The dataset includes 28 truckloads scanned using MLS (T1) and 20 truckloads scanned using the iPhone (T2). For each truckload, the reference volume, algorithm-computed volume, point cloud size, and processing time were calculated. A summary table of metadata is provided in Supplementary Materials Table S1, and descriptive statistics are shown in Supplementary Materials Table S2.
2.2. Manual and Factory Reference Measurements
In T1, manual and digital measurements were taken for a number of 28 truckloads. The manual measurements were made on each log following the procedure described in [6,12], subsequent to the digital measurements, by unloading the trucks. Trained personnel measured the diameters of the logs at regular intervals, typically every 50 cm along the log’s length. These diameter measurements were used to calculate the volume of each segment by assimilating it to a cylinder. The volume of a cylinder was computed by multiplying its cross-sectional area by the length of the segment, where the cross-sectional area was computed based on the average taken from the diameters at the ends of each segment. By summing the volumes of all of the measured cylinders, the total volume of each log was obtained; then, by summing the volumes of all of the logs from a given truckload, the volume of that truckload was estimated. This approach ensured that the volume of a truckload was accurately estimated by accounting for the spatial variation in the dimensions of the logs. Digital measurements were taken before unloading the trucks using a Zeb Revo Horizon professional LiDAR scanner. The protocols used for the data collection were similar to those described in [6]. In this comparison treatment, individual piles loaded onto a given truck (1 to 4) were considered for both manual and digital measurement.
In T2, two digital options were considered for comparison, namely scanning using a smartphone equipped with a LiDAR sensor (iPhone 14 Pro Max) and with the 3D Scanner App (https://3dscannerapp.com/, accessed on 30 July 2025) and measurements taken by the factory’s Microtec system. T2 was based on a sample of 20 truckloads. This treatment considered the piles forming a truckload as a whole. Some examples of the point clouds collected with the smartphone and the professional LiDAR scanner are given in Figure 1.
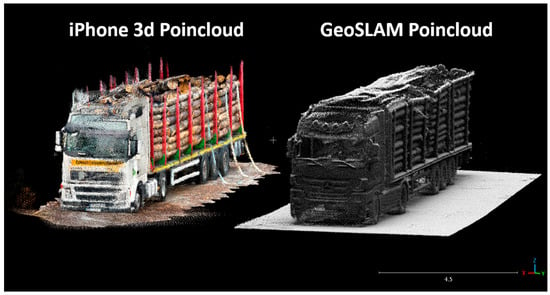
Figure 1.
Point clouds showing the trucks and their loads, as collected using an iPhone platform (left) and using a Zeb Revo Horizon mobile scanner (right).
2.3. The LiDAR Scanning Procedure
Regarding the professional LiDAR (T1), each truck was scanned prior to unloading using a Zeb Revo Horizon MLS scanner (GeoSLAM). The operator performed a closed-loop scan by walking around the truck and accessing upper loads using a mobile stair to ensure full 3D coverage. This scanner combines LiDAR with simultaneous localization and mapping (SLAM) and provides dense point clouds with a high resolution.
Regarding the smartphone LiDAR (T2), each truck was scanned in a single pass using an iPhone 14 Pro Max running the 3D Scanner App, which leverages Apple’s built-in LiDAR sensor. Scans captured both geometric and color information. The iPhone’s camera feed provided real-time guidance during acquisition. No additional accessories were used. The iPhone LiDAR and the 3D Scanner App were used together as a single approach, not independently.
Log-level manually collected data was manually transferred and processed in Microsoft Excel for Microsoft 365, Version 2406 (Build 17726.20126) by running a purposely-designed Visual Basic for Applications (VBA) code to compute the log-based volumes. Once this was complete, the truckload volume was computed for each of the 28 trucks under study in T1. The volume estimates for T2 were taken from the Microtec system. These volume estimates were used as a gold standard to compare the outputs of the digital methods. Point clouds collected with the iPhone and Zeb Revo Horizon platforms were preprocessed in the CloudCompare v2.13.2 software (https://www.danielgm.net/cc/, accessed on 30 July 2025), which included point cloud filtering, down-sampling, and outlier removal. These were carried out according to a procedure which was similar to that presented by [12], with the aim of increasing the quality and reliability of the data.
2.4. The Algorithm Workflow
The custom-built automated algorithm processes raw point clouds to estimate the load volume using the following steps (Figure 2):
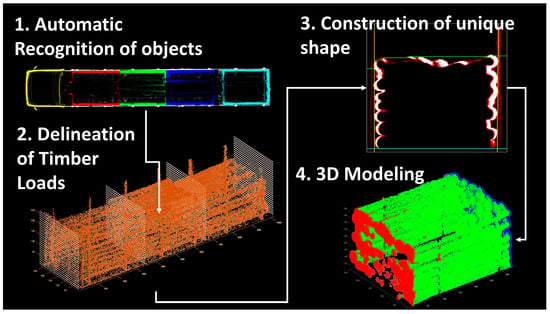
Figure 2.
The working concept of the automated truckload measurement.
- Scene Isolation: The truck is extracted from the background using bounding geometry constraints.
- Orientation Adjustment: The truck axis is aligned with the coordinate axes by rotating and translating the point cloud.
- Load Segmentation: Color-based labels are used to identify the cabin and 1–4 loads. White dotted planes delineate individual loads.
- Cross-Projections: For each load, multiple orthogonal 2D projections (start, middle, end) are generated to define the envelope.
- Three-Dimensional Modeling: Occluded or partially visible regions (e.g., top or back) are approximated using geometric interpolation and a closed 3D shape is reconstructed to compute the volume.
In the first step, the truck has to be extracted from the surrounding details captured in the point clouds, as these details can be very abundant and confusing, especially in LiDAR scenes [32]. The automatic identification is based on the assumption that the truck must be a large object, characterized by some specific geometric features, placed near the center of the scene. The next step consists of properly rearranging the data points through rotation and translation in order to set the ground horizontally and the longitudinal axis of the piles along one of the main horizontal axes. The algorithm continues by recognizing the timber loads extracted by the automatic system. Each load is labeled based on a color rule applied to all trucks. The color rule assigns specific colors to different parts of the truck, such as the cabin, the first load, the second load, the third load, the fourth load, and the fifth load (if present). For example, the cabin may be assigned a yellow color, the first load a red color, the second load a green color, and so on (Figure 2). Color-based recognition enables the algorithm to distinguish and identify the individual timber loads located on the truck.
Once the timber loads are recognized, the algorithm proceeds with delineation. The loads are delineated by separating them with plane surfaces, which are suggested in Figure 2 by the white dotted surfaces. These planes serve as boundaries for separating and isolating the loads from each other. After the loads are delineated, the algorithm further approximates the shape of each load. This is achieved by creating cross-projections for one load and creating a unique envelope shape for that load. Cross-projections are generated to capture the geometry of the load, and the resulting projections are used to define the overall shape of the load. The load’s envelope shape, which represents the observed boundaries of the load, is created based on the cross-projections. Also, the specific profile of the loads’ boundaries (with the lateral wavy line given by the overlapping logs) allows for their identification among other features such as the cabin or the crane.
The final step involves 3D modeling of each load. The green points selected from the original set are utilized to illustrate the geometry of the load’s unique envelope shape (Figure 2). Additionally, the red and blue surfaces suggest the observed boundaries of the load, specifically the front and back sections. It should be noted that in typical scans, some parts of the load, such as the heads, the top, or the interspaces between two adjacent loads, may be missing due to limited visual access, which is constrained by the available space. In such cases, the unseen parts of the load are approximated using deductive calculations, which employ geometric or logical interpolation methods. Due to these gaps in the data, it is usually impossible to count the actual number of logs and to estimate their diameters and lengths, but it is possible to approximate the volume of the envelope for each individual load and therefore to estimate the corresponding volume of wood. The modeling algorithm is able to cope with irregular loads, such as those showing a stair-like pattern or those with logs of an uneven length.
Through these steps, the algorithm enables the automatic measurement of truckload volume by accurately recognizing, delineating, and modeling each load based on the available point cloud data. The operationalization of the algorithm incorporates color-based labeling, plane cutting, cross-projections, and envelope shape creation to ensure a comprehensive and precise measurement process. The described algorithm was implemented using a Telegram bot as the interface. Users can upload point cloud data through the bot, which is then sent to the algorithm’s workflow for analysis. The bot delivers the results back to the user via Telegram, providing a user-friendly platform for interaction and data transfer. This approach enhances the user experience, simplifies the process, and integrates the algorithm seamlessly into existing workflows.
2.5. The Performance Assessment Methodology
Various statistical metrics and methods may be used to check the agreement between two alternative methods of measurement. For a reference on the typical methods used in studies with the objective of accuracy of alternative methods used in wood measurements, the reader is referred to the results in [12,25,33]. Usually, these statistical metrics and methods quantify the differences, errors, and correlations between the two measurement methods. In this study, the statistical metrics used for comparison include the mean absolute error (MAE), root mean squared error (RMSE), and coefficient of determination (R-squared), as well as a Bland–Altman analysis. We performed hypothesis testing to assess the statistical significance of the differences between the automated measurements and manual measurements. A paired t-test or a Wilcoxon signed-rank test was used to determine whether there was a significant difference between the two measurement methods. The null hypothesis assumes that there is no significant difference, and the alternative hypothesis suggests otherwise. The performance assessment was also checked in terms of the computational time relative to the size of the point clouds and the reference data on truckload volume. The statistical analysis was implemented in R Studio Desktop Posit Workbench: 2025.05.1, particularly by using a code based on the following libraries: the (dplyr) library, the (ggplot2) library, the (reshape2) library, the (tidyr) library, the (stringr) library, the (readr) library, and the (gridExtra) library [34]. The computational resources used to process the point clouds consisted of a common graphical station and the VirtSilv v2025 (https://www.virtsilv.com/how-it-works/management-inventory, accessed on 30 July 2025) processing workflow, which is based on Python v3.12.11-implemented algorithms.
3. Results
3.1. The Performance Assessment
For the data used in T1, the algorithm effectively processed all of the point clouds, generating essential visualizations and accurate measurements for each truckload. This functionality is exemplified in Figure 3, which shows visual comparisons between the input point clouds and the segmented outputs for both T1 (MLS) and T2 (the iPhone). This comprehensive approach facilitated an efficient data analysis and provided a clear visualization of the spatial arrangement and characteristics of the timber loads. Figure 3 provides some visual examples characterizing the performance of the algorithm with side-view and top-view segmentation of the loads.
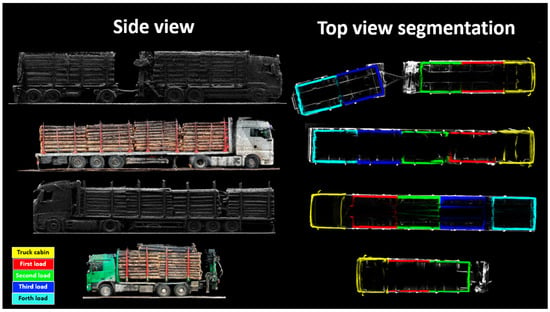
Figure 3.
Outputs of the algorithm based on the digital data from T1 and T2.
The main statistics characterizing the performance of the algorithm for both T1 and T2 are given in Figure 4. Regarding T1, the descriptive statistics revealed that the computational time ranged from 113 s to 255 s, with a mean value of 165.2 s, under conditions in which the 3D point cloud data varied from 1,954,724 to 8,340,470 points, with a mean value of 3,594,003 points, and the truckload reference volume varied from 31.21 to 54.07 m3, with a mean value of 43.56 m3. Regarding the computational time (T2), the descriptive statistics reveal that it ranged from 94 s to 311 s, with a mean value of 180.8 s. The 3D point cloud data varied from 1,666,658 to 3,504,807 points, with a mean value of 2,522,390 points. The truckload reference volume ranged from 24.72 to 46.37 m3, with a mean value of 35.97 m3.
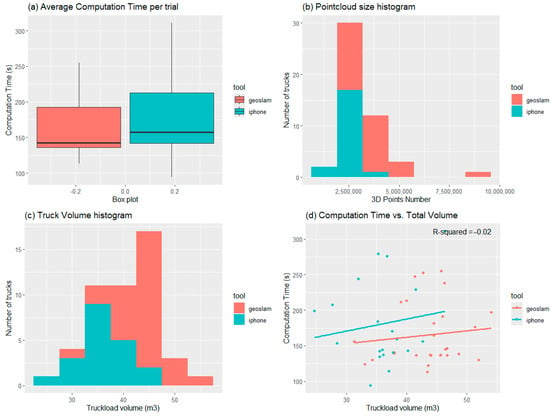
Figure 4.
Statistics on the performance of the algorithm when run on the digital data from T1 and T2.
The correlation analysis indicates weak associations between computational time and the considered variables. For both T1 and T2, the correlation coefficient between point cloud size and computational time was 0.016; between truckload volume and time, it was 0.012, indicating negligible relationships. Similarly, the correlation coefficient when taking the computational time and the truckload volume as the variables was 0.012, indicating an even weaker association. These values were not statistically significant (p > 0.05), confirming that neither input size nor truckload volume meaningfully influenced the computation time. Hypothesis testing using linear regression supports the findings further. The model examining the variation in computational time as a function of the point cloud size revealed that the slope of the point cloud variable was very small (−4.472 × 10−6 for T1 and 4.222 × 10−5 for T2), indicating that for every additional point, the computational time decreased only marginally. Also, the coefficient was not statistically significant (p = 0.526 for T1 and p = 0.336 for T2), suggesting that the relationship was not meaningful. The adjusted R-squared value was −0.02 for T1 and 0.02 for T2, indicating that the model did not explain a significant portion of the variance in the computational time. Similarly, the model examining the variation in computational time as a function of the truckload volume was characterized by a slope of 0.899 for T1 and 1.702 for T2, implying that an increase in the truckload volume led to a slight increase in the computational time. However, the model was not found to be statistically significant (p = 0.573 for T1 and p = 0.542 for T2), and the adjusted R-squared values of −0.026 for T1 and −0.033 for T2 indicated that the model did not explain a substantial proportion of the variance in the computational time.
In summary, the analysis suggested that neither the scanning tool, the size of the point cloud, nor the truckload volume significantly affected the computational time. Figure 4a shows the processing time per truckload; Figure 4b,c show the relationship with point count and volume, respectively. This finding implies that the algorithm used for automatic measurement is efficient and robust, as it can handle varying point cloud sizes and truckload volumes without a substantial increase in the computational time.
3.2. Agreement
For the data used in T1, the results on the agreement between the compared methods are summarized in Figure 5. The statistical metrics and hypothesis testing results provide insights into the agreement between the automated and manual measurements of the truckload volumes. The mean absolute error (MAE) value of 2.055 indicates that on average, the automated measurements differ from the manual measurements by approximately 2.06 units. This metric provides a measure of the average magnitude of the errors between the two methods [35]. The root mean squared error (RMSE) value of 2.457 represents the square root of the average squared differences between the automated and manual measurements. It provides a measure of the overall accuracy of the automated measurements compared to that of the manual measurements.
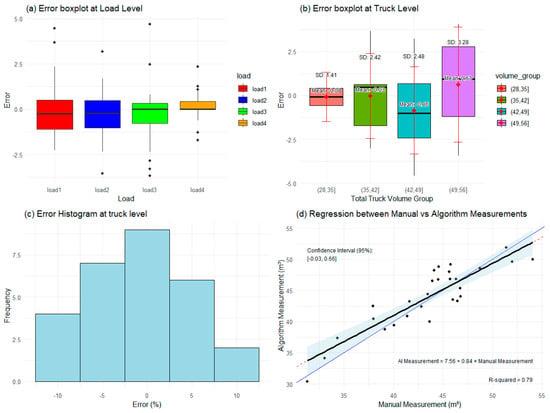
Figure 5.
The results of the validation, accuracy assessment and robustness check of the data from T1.
Figure 5 shows high agreement between the automated and manual measurements. Boxplots at the load and truck levels (Figure 5a,b) show low, centered errors with no systematic bias. The error histogram (Figure 5c) indicates that most of the deviations fall within ±5%. The regression plot (Figure 5d) confirms the strong correlation (R2 = 0.79) and alignment with the manual values.
A correlation coefficient of 0.890 was found, indicating a strong positive association between the automated and manual measurements. This suggests a high degree of linear relationship between the two methods, indicating that the results of the automated measurements closely follow those of the manual measurements. Regarding the hypothesis testing, the p-value of 0.386 from the paired t-test suggests that there is no statistically significant difference between the automated and manual measurements at a significance level of 0.05. Therefore, we failed to reject the null hypothesis, which assumed that there was no significant difference between the two measurement methods. The p-value of 0.374 from the Wilcoxon signed-rank test also indicates no significant differences between the automated and manual measurements at a significance level of 0.05. Hence, we again failed to reject the null hypothesis.
Figure 6 shows some of the assessment results obtained for T2 and reveals more variability and a clear overestimation trend. The boxplots (Figure 6a,b) show higher errors, especially in lower volume classes. The error histogram (Figure 6c) shows a positive skew. The regression (Figure 6d) confirms the strong correlation (R2 = 0.70) but with a systematic offset above the 1:1 line.
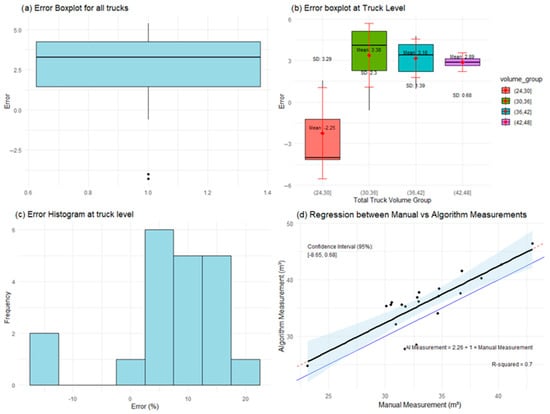
Figure 6.
The results of the validation, accuracy assessment, and robustness check of the data from T2.
The assessment of T2 demonstrated a relatively low MAE and RMSE, indicating a good predictive accuracy. The high correlation coefficient found suggests a strong linear relationship, and both the paired t-test and the Wilcoxon signed-rank test provide statistical evidence of a significant difference between the predicted and actual values. Overall, these findings suggest that the model performs well in capturing the underlying patterns in the data. The descriptive statistics for T2 reveal important insights into the performance of the predictive model.
The mean absolute error (MAE) was calculated at 3.2905, representing the average absolute difference between the predicted and actual values. A lower MAE indicates a better overall accuracy. The root mean square error (RMSE) was estimated at 3.6017, offering an additional perspective on the accuracy of the model. The RMSE penalizes larger errors more heavily than the MAE. The correlation coefficient of 0.84 indicates a strong positive linear relationship between the predicted and actual values. This suggests significant alignment between the model predictions and the true values. The results of the paired t-test revealed a p-value of less than 0.001, leading to the rejection of the null hypothesis that the mean difference between the paired observations is zero. This suggests a statistically significant difference. Similarly, the Wilcoxon signed-rank test yielded a p-value of 0.003, further supporting evidence of a significant difference in the distribution of the paired observations.
Overall, the statistical metrics (MAE, RMSE) indicated a reasonable level of agreement between the automated and manual measurements. The high correlation coefficient suggests that the automated measurements tend to closely match the manual measurements. The hypothesis testing results provide evidence that there is no significant difference between the two measurement methods when using the MLS GeoSLAM but that they are overestimated, with a low level of significance, when using iPhone LiDAR. These findings support the reliability and accuracy of the automated measurement algorithm in estimating truckload volumes when compared to manual factory-based measurements.
4. Discussion
This study evaluated the performance of an automated algorithm for estimating truckload volumes using LiDAR-derived 3D point clouds from two different scanning platforms: a professional mobile laser scanning (MLS) system (T1) and a consumer-grade iPhone LiDAR (T2). The algorithm’s estimates were compared against two types of reference data—manual field measurements and factory-based data—to assess its accuracy, agreement, and operational suitability.
Automated estimation of truckload volumes is gaining increasing relevance in forest operations globally, especially in the context of long-distance wood transport logistics. Kärhä et al. [36] offer a comprehensive overview of industrial roundwood transport chains, emphasizing the need for digitalization to reduce bottlenecks and improve traceability. Integrating algorithms such as the one evaluated here into digital workflows aligns with broader industry trends. Additionally, data collected by harvesters equipped with onboard sensors are already being used to estimate truck volume [37,38]. These datasets can provide reliable references for calibrating automated systems in large-scale applications. However, legal, technical, and operational limitations remain when integrating harvester data into national wood supply systems, including interoperability, standardization, and trust in automated metrics [38,39]. The use of independent scanning platforms—such as MLS and iPhone LiDAR—offers a complementary pathway to support real-time verification or redundancy where harvester data may be absent or inaccessible.
The core principle of the algorithm—fitting an envelope around the truckload point cloud and slicing cross-sections for volumetric calculation—is consistent with the practices adopted in previous 3D object volume estimation workflows, particularly in forestry and industrial scanning contexts [40,41]. While adapted to truckload shapes, the logic follows the general approaches to geometric reconstruction and segmentation from irregular point clouds. Similarly, the performance evaluation employed the Wilcoxon signed-rank test, a non-parametric method commonly applied in forestry and remote sensing studies when comparing paired data that may not follow a normal distribution [42,43]. This statistical approach provides robust insights into whether systematic differences exist between methods.
For the MLS-based data (T1), the algorithm demonstrated high levels of agreement with the manual reference measurements. Statistical indicators such as the mean absolute error (MAE ≈ 2.06 m3) and the root mean square error (RMSE ≈ 2.46 m3) indicated strong accuracy, and a correlation coefficient of 0.89 confirmed a consistent linear relationship. No statistically significant differences were found between the automated and manual measurements, suggesting that MLS-derived point clouds, when acquired with the proper scanning coverage, are well suited to truckload volume estimation using this algorithm.
In contrast, the iPhone-based data (T2) showed higher error metrics (MAE ≈ 3.29 m3; RMSE ≈ 3.60 m3) and revealed statistically significant differences when compared to factory-derived reference values. While the correlation remained high (0.84), the automated estimates tended to overestimate volume, especially for smaller loads. This overestimation is likely due to occlusions and the lower scan resolution associated with the iPhone platform, which may result in incomplete point clouds and less accurate envelope modeling [44].
Differences between the two trials can be partly attributed to variations in scanning strategy and coverage. In T1, the MLS device captured the full geometry of the truckload, including partial top-down views that enhanced envelope modeling. The iPhone LiDAR, when operated from a handheld position at ground level, provided more limited coverage, particularly at the top of the load. These disparities directly influenced the completeness and quality of the resulting point clouds, affecting how well the algorithm could infer the spatial structure of the load. Previous studies have shown that scan geometry and occlusion patterns are critical in determining point cloud fidelity and volume estimation accuracy [45,46,47].
The algorithm’s estimates reflect a volume situated between solid and gross volumes, due to partial occlusion, irregularities on the surface of bark, and interlocking logs. The MLS-derived outputs, benefiting from better coverage, appeared to reflect more realistic solid volume estimates, while the iPhone-based estimates tended toward gross volume values due to overestimation and limited segmentation. This distinction is important in interpreting the results and understanding which use cases are best suited to each platform.
Despite the lower accuracy of the iPhone system, it presents significant advantages in terms of its ease of use, cost, and real-time delivery. Scans can be acquired quickly and processed within seconds via an integrated Telegram python-telegram-bot v22.3 [48]. The platform requires minimal technical training and uses freely available software, making it accessible to a wide range of forest operators. In operational environments where speed and accessibility are critical—such as roadside checks, decentralized operations, or rapid supply assessments—this platform provides a viable alternative to more expensive MLS systems. Other studies also highlight the practical value of smartphone-based scanning solutions, particularly in low-infrastructure or mobile applications [49].
In contrast, MLS platforms remain more suitable for applications requiring higher precision, such as timber sale verification, quality audits, and integration with mill inventory systems. However, the cost of acquisition, need for skilled operation, and post-processing time can limit their widespread deployment in time-sensitive forest logistics. These trade-offs underscore the importance of selecting the appropriate tool based on user needs, resource availability, and required accuracy thresholds [50].
This study also identifies key limitations. First, the datasets for T1 and T2 involved different truckloads, which prevented a direct statistical comparison. Nonetheless, both sets reflect realistic field conditions and provide valuable insights into how the algorithm performs under varied scanning conditions. Second, the sample size was limited, both in terms of the number of truckloads and the diversity of species and log configurations. Broader trials would be needed to confirm generalizability, especially for longer logs, mixed species loads, and regional differences in stacking patterns. In addition, external factors such as light conditions, surface moisture, and bark texture were not explicitly controlled and may have influenced point cloud quality.
Future improvements could include integrating this algorithm with higher-level log segmentation models, enabling not only volume estimation but also individual log detection and classification. Additional research is needed to evaluate the performance under challenging environmental conditions (e.g., rain, snow, variable lighting) and with truckloads sourced from different silvicultural systems or forest types. Larger datasets, including those from roadside inventories or harvester-mounted scanners, would enhance model calibration and robustness [51].
Finally, the algorithm was designed to deliver results that balance accuracy with operational feasibility, supporting improved planning, transparency, and traceability in timber transport. Automated approaches such as this one can reduce the reliance on manual measurements, limit human error, and accelerate data flows between field teams, haulers, and processors. However, to ensure long-term performance, periodic recalibration and validation of both the scanning system and the algorithm remain essential.
5. Conclusions
In conclusion, this study demonstrates the agreement and reliability of the algorithm-based measurements in estimating truckload volumes. The statistical metrics, hypothesis testing results, and scatterplot analysis provide a comprehensive understanding of the algorithm’s performance. These findings support the potential application of the algorithm to timber volume estimation, contributing to improved resource management and sustainable forest practices. However, further research and validation are required to address specific limitations and to optimize the algorithm’s performance in diverse operational contexts.
Supplementary Materials
The following supporting information can be downloaded at https://www.mdpi.com/article/10.3390/f16081281/s1. Table S1: The original data on truckload measurement, including the initial point cloud views, the processed data, and the descriptive statistics for the two treatments. Note: MLS—MLS GeoSLAM (T1); IP—iPhone (T2); PT—processing time; NPoints—number of points in the cloud; VA—volume in cubic units resulting from the algorithm’s computation; VR—reference volume in cubic units as sourced through manual measurements or the factory’s system. Table S2: Descriptive statistics.
Author Contributions
Conceptualization: M.D.N. and S.A.B.; methodology: M.D.N. and C.C.-D.; software: C.C.-D.; validation: M.D.N., B.G. and I.I.; formal analysis: M.D.N.; investigation: M.D.N. and B.C.; resources: S.A.B.; data curation: B.C. and I.I.; writing—original draft preparation: M.D.N.; writing—review and editing: S.A.B. and B.G.; visualization: C.C.-D.; supervision: S.A.B.; project administration: S.A.B.; funding acquisition: S.A.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was partially funded by grants from the Romanian Ministry of Education and Research, CNCS-UEFISCDI, project number PN-III-P4-ID-PCE-2020-0401, within PNCDI III; project number PN-IV-P8-8.1-PRE-HE-ORG-2023-0141; and project number PN-IV-P8-8.1-PRE-HE-ORG-2024-0186, within PNCDI IV.
Data Availability Statement
The original contributions presented in this study are included in the article; further inquiries can be directed to the corresponding authors.
Acknowledgments
The authors would like to thank the Department of Forest Engineering, Forest Management Planning and Terrestrial Measurements, the Faculty of Silviculture and Forest Engineering, Transilvania University of Brasov, for providing part of the equipment required by this study. Also, the authors would like to thank the team members of the Hypercube 4.0 project for their logistical support of this study in the data collection and processing and the management of the wood processing factory. The data collection in this work and some parts of the data processing were supported by the Romanian Ministry of Education and Research, CNCS-UEFISCDI. One of the objectives of the Hypercube 4.0 project was to compare the accuracy of advanced technologies that have potential for wood measurements against the manual, traditional wood measurement options.
Conflicts of Interest
Authors Mihai Daniel Niţă, Cătălin Cucu-Dumitrescu, Bogdan Candrea, Bogdan Grama and Iulian Iuga were employed by the company Forest Core. Authors Mihai Daniel Niţă and Bogdan Candrea were employed by the company Forest Design. The remaining author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Scholz, J.; De Meyer, A.; Marques, A.S.; Pihno, T.M.; Boaventura-Cunha, J.; Orshoven, J.V.; Rosset, C.; Künzi, J.; Kaarle, J.; Nummila, K. Digital technologies for forest supply chain optimization: Existing solutions and future trends. Environ. Manag. 2018, 62, 1108–1133. [Google Scholar] [CrossRef]
- D’Amours, S.; Rönnqvist, M.; Weintraub, A. Using operations research for supply chain planning in the forest products industry. Inf. Syst. Oper. Res. 2008, 46, 265–281. [Google Scholar]
- Rauch, P.; Borz, S.A. Reengineering the Romanian timber supply chain from a process management perspective. Croat. J. For. Eng. 2020, 41, 85–94. [Google Scholar] [CrossRef]
- Windisch, J.; Röser, D.; Mola-Yudego, B.; Sikanen, L.; Asikainen, A. Business process mapping and discrete-event simulation of two forest biomass supply chains. Biomass Bioenergy 2013, 56, 370–381. [Google Scholar] [CrossRef]
- Müller, F.; Jaeger, D.; Hanewinkel, M. Digitization in wood supply—A review of how Industry 4.0 will change the forest value chain. Comput. Electron. Agric. 2019, 162, 206–218. [Google Scholar] [CrossRef]
- Borz, S.A.; Proto, A.R. Application and accuracy of smart technologies for measurements of roundwood: Evaluation of time consumption and efficiency. Comput. Electron. Agric. 2022, 197, 106990. [Google Scholar] [CrossRef]
- Lyons, C.K.; Borz, S.A.; Harvey, C.; Ramantswana, M.; Sakai, H.; Visser, R. Forest roads: Regional perspectives from around the world. Int. J. For. Eng. 2023, 34, 190–203. [Google Scholar] [CrossRef]
- Palander, T.; Haavikko, H.; Kortelainen, E.; Kärhä, K.; Borz, S.A. Improving environmental and energy efficiency in wood transportation for a carbon-neutral forest industry. Forests 2021, 11, 1194. [Google Scholar] [CrossRef]
- Palander, T.; Borz, S.A.; Kärhä, K. Impacts of Road Infrastructure on the Environmental Efficiency of High Capacity Transportation in Harvesting of Renewable Wood Energy. Energies 2021, 14, 453. [Google Scholar] [CrossRef]
- Chabanet, S.; Bril El-Haouzi, H.; Morin, M.; Gaudreault, J.; Thomas, P. Toward digital twins for sawmill production planning control: Benefits opportunities challenges. Int. J. Prod. Res. 2023, 61, 2190–2213. [Google Scholar] [CrossRef]
- Moskalik, T.; Borz, S.A.; Dvořák, J.; Ferencik, M.; Glushkov, S.; Muiste, P.; Lazdiņš, A.; Styranivsky, O. Timber harvesting methods in Eastern European countries: A review. Croat. J. For. Eng. 2017, 38, 231–241. [Google Scholar]
- Niţă, M.D.; Borz, S.A. Accuracy of a Smartphone-based freeware solution and two shape reconstruction algorithms in log volume measurements. Comput. Electron. Agric. 2023, 205, 107653. [Google Scholar] [CrossRef]
- Sandberg, D.; Fink, G.; Hasener, J.; Kairi, M.; Marhenke, T.; Ross, R.J.; Steiger, R.; Wang, X. Process Control Grading in Primary Wood Processing; Springer Handbooks: Berlin/Heidelberg, Germany, 2023; pp. 1019–1073. [Google Scholar]
- Acuna, M.; Sosa, A. Automated volumetric measurements of truckloads through multi-view photogrammetry 3D reconstruction software. Croat. J. For. Eng. 2019, 40, 151–162. [Google Scholar]
- Carratù, M.; Gallo, V.; Liguori, C.; Lundgren, J.; O’Nils, M.; Pietrosanto, A. Vision-based system for measuring the diameter of wood logs. IEEE Open J. Instrum. Meas. 2023, 2, 5000112. [Google Scholar] [CrossRef]
- Carvalho, F.D.; Correia, B.A.B.; Davies, R.; Rodrigues, F.C.; Freitas, J.C.A. Image processing system for the measurement of timber truck loads. In Proceedings of the International Conference on Manufacturing Automation, Hongkong, China, 18 January 1993; Volume 1713, pp. 86–92. [Google Scholar] [CrossRef]
- Li, H.; Xiong, P.; An, J.; Wang, L. Pyramid attention network for semantic segmentation. In Proceedings of the British Machine Vision Conference 2018, BMVC 2018, Newcastle, UK, 3–6 September 2018. [Google Scholar]
- Maturana, D.; Scherer, S. VoxNet: A 3D convolutional neural network for real-time object recognition. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2018; pp. 922–928. [Google Scholar] [CrossRef]
- Mohammadi, S.S.; Wang, Y.; Bue, A.D. 2021. POINTVIEW-GCN: 3D shape classification with multi-view point clouds. In Proceedings of the Proceedings—International Conference on Image Processing, ICIP, Anchorage, AK, USA, 19–22 September 2021; pp. 3103–3107. [Google Scholar] [CrossRef]
- Xu, D.; Li, F.; Wei, H. 2019. 3D point cloud plane segmentation method based on RANSAC and support vector machine. In Proceedings of the 14th IEEE Conference on Industrial Electronics and Applications, ICIEA 2019, Xi’an, China, 19–21 June 2019; pp. 943–948. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, C.; Tian, S.; Lu, B.; Zhang, L.; Ning, X.; Bai, X. Deep learning-based 3D point cloud classification: A systematic survey and outlook. Displays 2023, 79, 102456. [Google Scholar] [CrossRef]
- Sikora, J.; Fojtik, D.; Gebauer, J.; Podesva, P.; Mihola, M. Preparation of 3D models of trucks for timber load analysis. In Proceedings of the 2019 20th International Carpathian Control Conference, ICCC 2019, Krakow-Wieliczka, Poland, 26–29 May 2019. [Google Scholar] [CrossRef]
- Measuring Results—LoadMon. Available online: https://loadmon.com/measuring-results/ (accessed on 1 November 2023).
- Väyrynen, S. Timspect-Konenäköjärjestelmän Tarkkuus Puutavara-Autokuormien Tilavuuden Mittaamisessa. 2022. Available online: https://erepo.uef.fi/handle/123456789/26724 (accessed on 30 July 2025).
- Borz, S.A.; Toaza, J.M.M.; Forkuo, G.O.; Marcu, M.V. Potential of Measure app in estimating log biometrics: A comparison with conventional log measurement. Forests 2022, 13, 1028. [Google Scholar] [CrossRef]
- Fojtík, D.; Podešva, P.; Mahdal, M.; Mihola, M. Scanning of trucks to produce 3D models for analysis of timber loads. In Proceedings of the 2016 17th International Carpathian Control Conference, ICCC 2016, Tatranska Lomnica, Slovakia, 29 May–1 June 2016; pp. 194–199. [Google Scholar] [CrossRef]
- Agarwal, S.; Awan, A.; Roth, D. Learning to detect objects in images via a sparse, part-based representation. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1475–1490. [Google Scholar] [CrossRef]
- Nájera-Luna, J.A.; Méndez-González, J.; Corral-Rivas, S.; Hernández, F.J. Productivity of manual loading system of logs in El Salto, Durango, México. Rev. Chapingo Ser. Cienc. For. Ambient. 2023, 29, 119–131. [Google Scholar] [CrossRef]
- Niță, M.D. Testing forestry digital twinning workflow based on mobile lidar scanner and ai platform. Forests 2021, 12, 1576. [Google Scholar] [CrossRef]
- Zhao, H.; Sha, J.; Zhao, Y.; Xi, J.; Cui, J.; Zha, H.; Shibasaki, R. Detection and tracking of moving objects at intersections using a network of laser scanners. IEEE Trans. Intell. Transp. Syst. 2012, 13, 655–670. [Google Scholar] [CrossRef]
- Svilans, T.; Tamke, M.; Thomsen, M.R.; Runberger, J.; Strehlke, K.; Antemann, M. New workflows for digital timber. In Digital Wood Design: Innovative Techniques of Representation in Architectural Design; Springer International Publishing: Cham, Switzerland, 2019; Volume 24, pp. 93–134. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Lampinen, J.; Kaartinen, H.; Kukko, K.; Puttonen, E.; Hyyppä, H. Object classification recognition from mobile laser scanning point clouds in a road environment. IEEE Trans. Geosci. Remote. Sens. 2016, 56, 1226–1239. [Google Scholar] [CrossRef]
- de Miguel-Díez, F.; Reder, S.; Wallor, E.; Bahr, H.; Blasko, L.; Mund, J.-P.; Cremer, T. Further application of using a personal laser scanner simultaneous localization mapping technology to estimate log’s volume its comparison with traditional methods. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102779. [Google Scholar] [CrossRef]
- Posit PBC. R Studio: Integrated Development Environment for R; Posit PBC: Boston, MA, USA, 2012; pp. 165–171. [Google Scholar]
- Wilmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean squared error (RMSE) in assessing the average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Kärhä, K.; Donagh, P.M.; Acuna, M.; Kanzian, C.; Petković, V.; Robert, R.C.G.; Costa, L.H.S.; da Cruz, R.C.; Krumov, T.; Bradley, A.; et al. Overview of global long-distance road transportation of industrial roundwood. Croat. J. For. Eng. 2024, 45, 217–236. [Google Scholar] [CrossRef]
- Hohmann, F.; Ligocki, A.; Frerichs, L. Harvester measuring system for trunk volume determination: Comparison with the real trunk volume and applicability in the forest industry. Bull. Transilv. Univ. Bras. Spec. Issue Ser. II For.—Wood Ind.—Agric. Food Eng. 2017, 10, 27–34. [Google Scholar]
- Hartsch, F.; Kemmerer, J.; Labelle, E.R.; Jaeger, D.; Wagner, T. Integration of harvester production data in German wood supply chains: Legal, social and economic requirements. Forests 2021, 12, 460. [Google Scholar] [CrossRef]
- Kemmerer, J.; Labelle, E.R. Using harvester data from on-board computers: A review of key findings opportunities challenges. Eur. J. For. Res. 2021, 140, 1–17. [Google Scholar] [CrossRef]
- Florea, S.C.; Dutca, I.; Nita, M.D. Tradeoffs and limitations in determining tree characteristics using 3D pointclouds from terrestrial laser scanning: A comparison of reconstruction algorithms on European bech (Fagus sylvatica L.) trees. Ann. For. Res. 2024, 67, 185–199. [Google Scholar] [CrossRef]
- Baban, G.; Niţă, M.D. Measuring forest height from space. Opportunities and limitations observed in natural forests. Measurement 2023, 211, 112593. [Google Scholar] [CrossRef]
- Wilcoxon, F. Individual comparisons by ranking methods. Biom. Bull. 1945, 1, 80–83. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Askar, C.; Sternberg, H. Use of smartphone lidar technology for low-cost 3D building documentation with iPhone 13 pro: A comparative analysis of mobile scanning applications. Geomatics 2023, 3, 563–579. [Google Scholar] [CrossRef]
- Balenović, I.; Liang, X.; Jurjević, L.; Hyyppä, J.; Seletković, A.; Kukko, A. Hand-held personal laser scanning—Current status perspectives for forest inventory application. Croat. J. For. Eng. 2021, 42, 165–183. [Google Scholar] [CrossRef]
- Si, H.; Qiu, J.; Li, Y. A review of point cloud registration algorithms for laser scanners: Applications in large-scale aircraft measurement. Appl. Sci. 2022, 12, 10247. [Google Scholar] [CrossRef]
- Abreu, N.; Pinto, A.; Matos, A.; Pires, M. Procedural point cloud modelling in scan-to-BIM and scan-vs-BIM applications: A review. ISPRS Int. J. Geo-Inf. 2023, 12, 260. [Google Scholar] [CrossRef]
- Gunawan, T.S.; Babiker, A.B.F.; Ismail, N.; Effendi, M.R. Development of intelligent telegram chatbot using Natural Language Processing. In Proceedings of the 2021 7th International Conference on Wireless and Telematics (ICWT), Bandung, Indonesia, 19–20 August 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Naser, R.S.; Lam, M.C.; Qamar, F.; Zaidan, B.B. Smartphone-based indoor localization systems: A systematic literature review. Electronics 2023, 12, 1814. [Google Scholar] [CrossRef]
- Ullah, H.; Uzair, M.; Jan, Z.; Ullah, M. Integrating industry 4.0 technologies in defense manufacturing: Challenges, solutions, and potential opportunities. Array 2024, 23, 100358. [Google Scholar] [CrossRef]
- Mazzochin, J.V.; Vitor, G.B.; Tiecker, G.; Diniz, E.M.; Oliveira, G.A.; Trentin, M.; Rodrigues, É.O. A Novel Approach for the Counting of Wood Logs Using cGANs and Image Processing Techniques. Forests 2025, 16, 237. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).