
Forest Cover Change Monitoring Using Sub-Pixel Mapping with Edge-Matching Correction


Abstract
1. Introduction
2. Materials and Methods
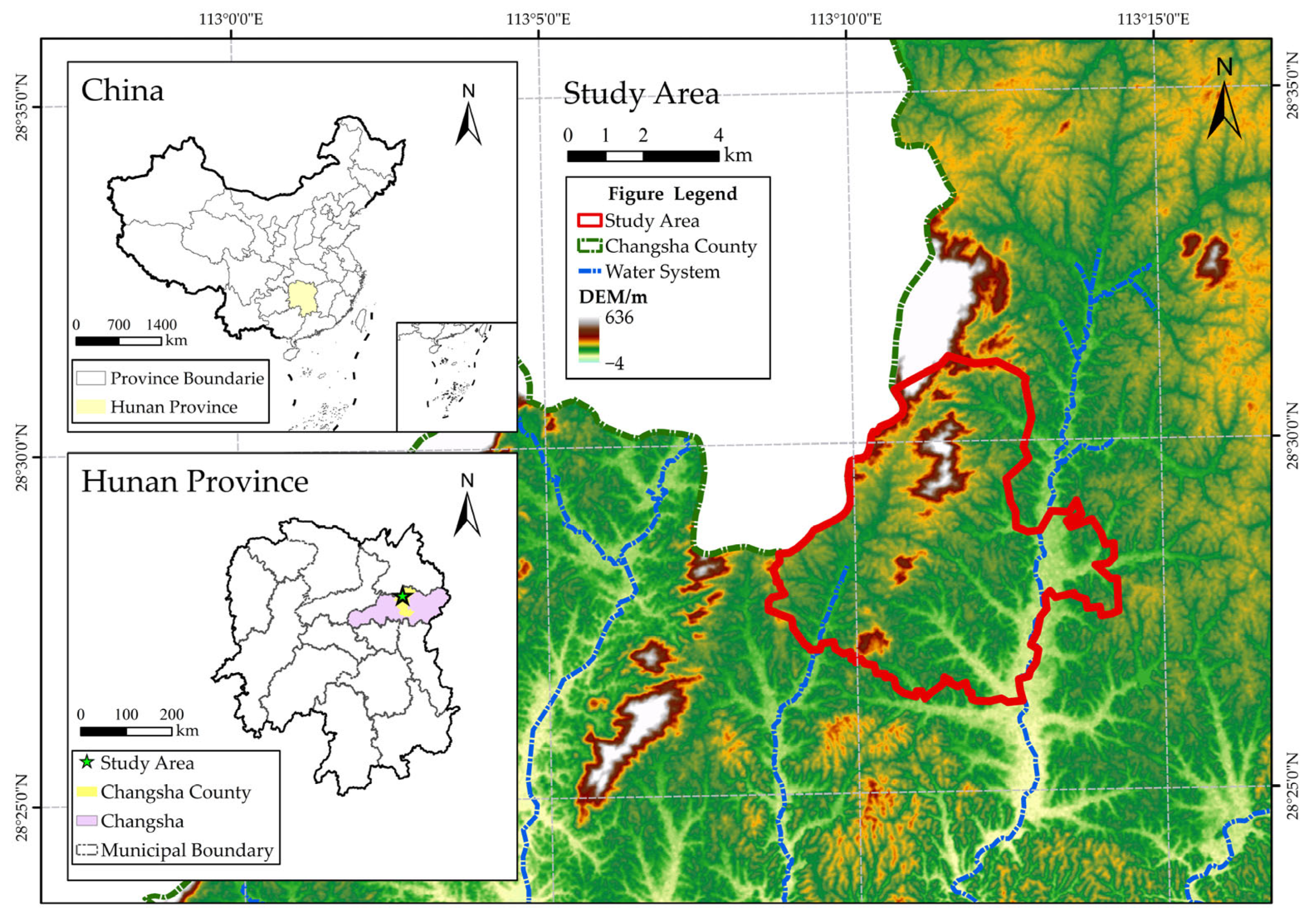
2.1. Study Area
2.2. Data Resources and Data Pre-Processing
2.3. Pixel-Level Forest Cover Monitoring
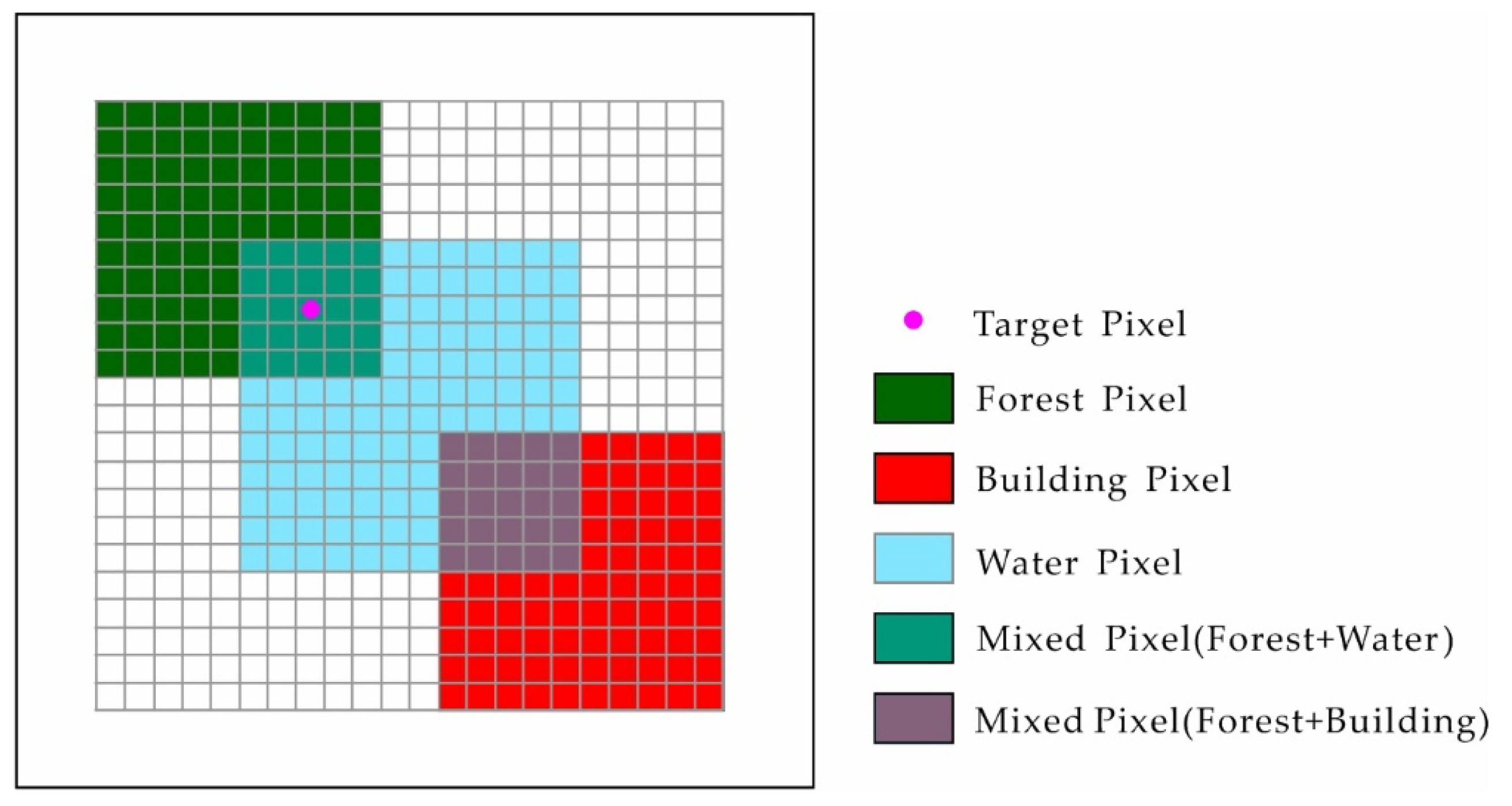
2.4. Mixed Pixel Decomposition Based on LSMM
- (1)
- , i.e., the percentage of pixel accounted for by the endmember of each land class (abundance) is not negative.
- (2)
- , i.e., the sum of the percentage of pixel accounted for by the endmember of each land class (abundance) is 1.
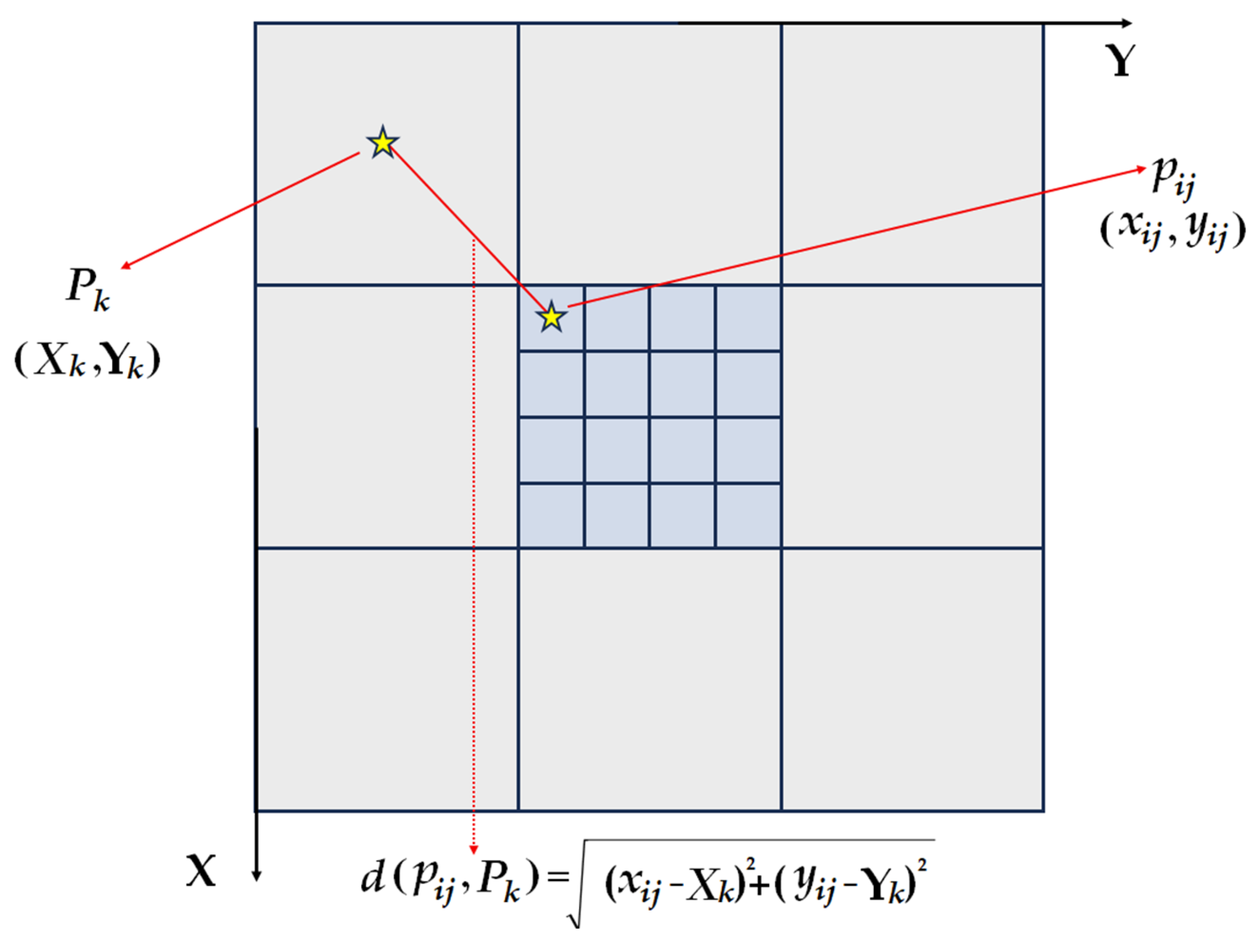
2.5. Sub-Pixel Mapping Based on SPSAM
2.6. Sub-Pixel Mapping Correction Based on Edge-Matching
2.7. Accuracy Assessment
- (1)
- Overall Accuracy (OA):
- (2)
- Producer Accuracy (PA):
- (3)
- User Accuracy (UA):
- (4)
- Kappa coefficient:
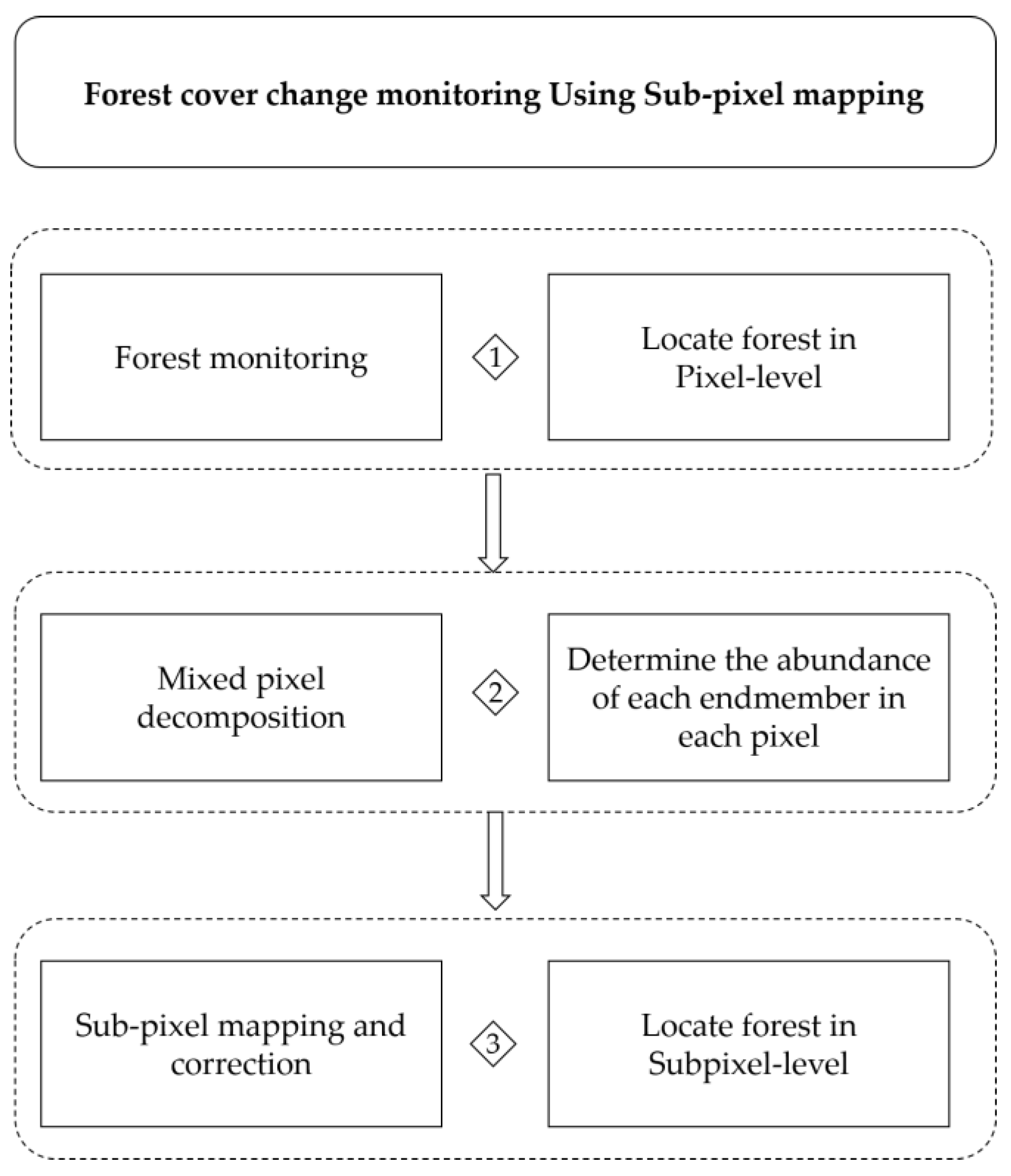
2.8. Graphical Abstract of the Research Program
3. Results
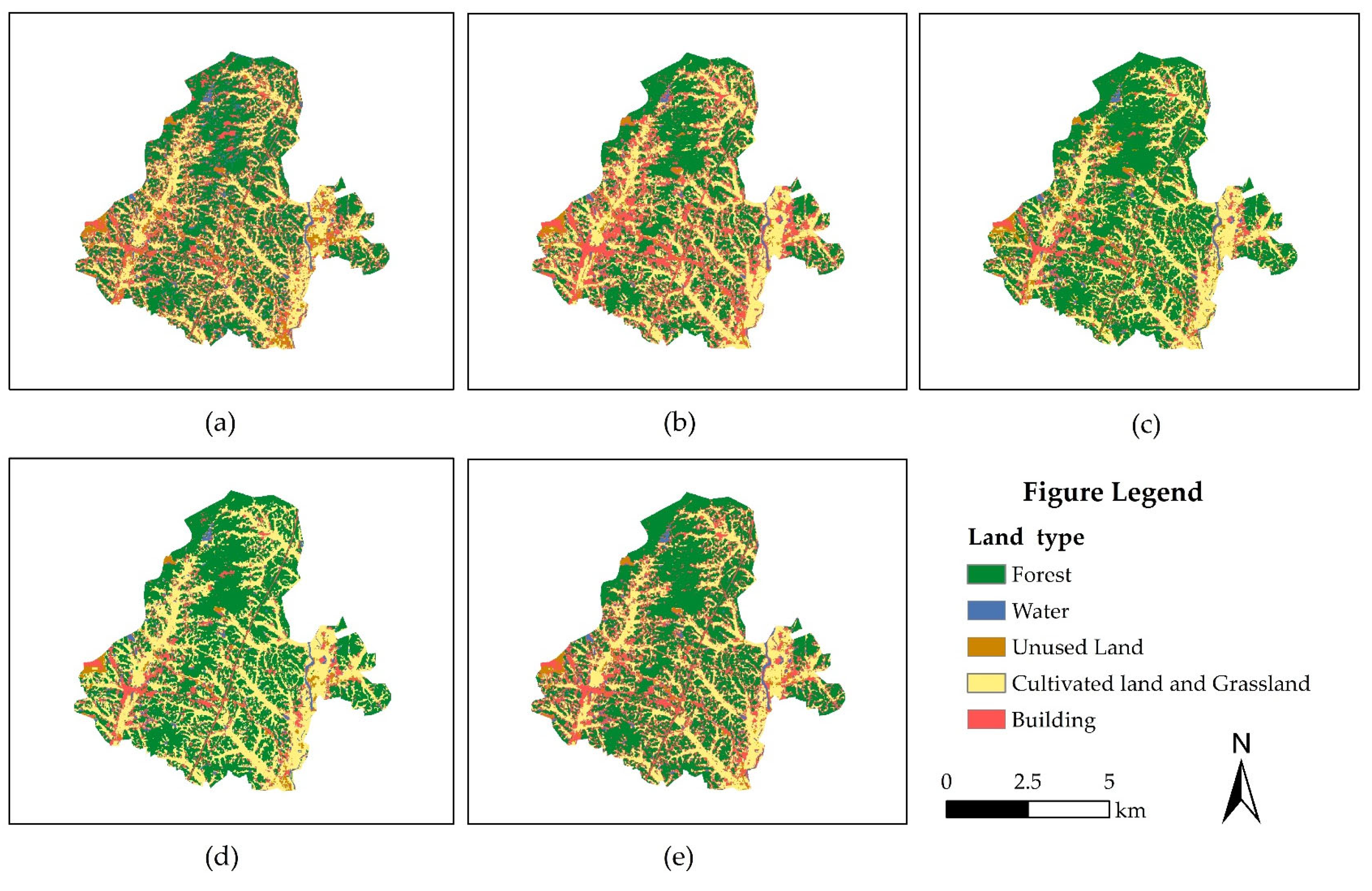
3.1. Result of Pixel-Level Forest Cover Monitoring
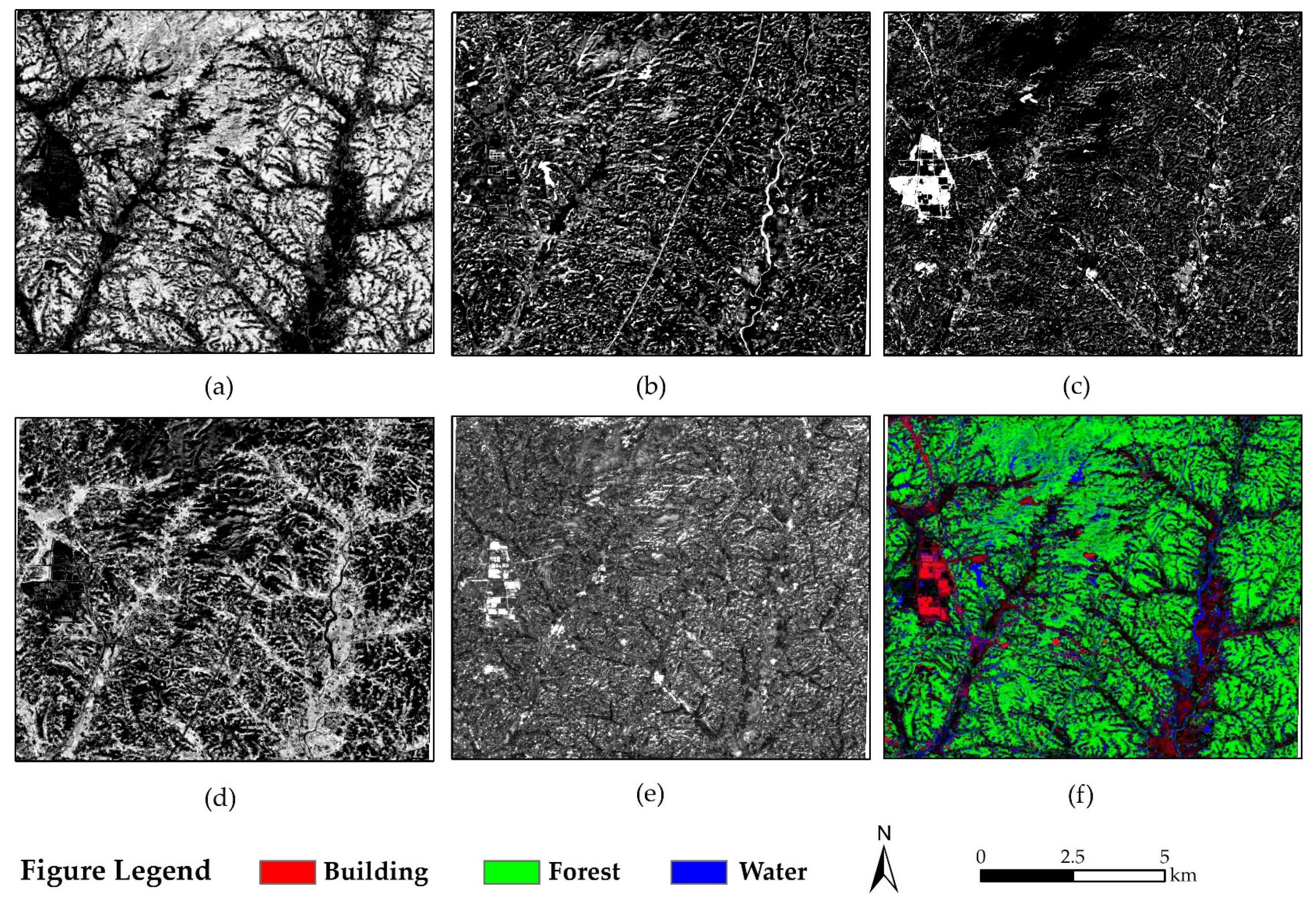
3.2. Results of Mixed-Pixel Decomposition
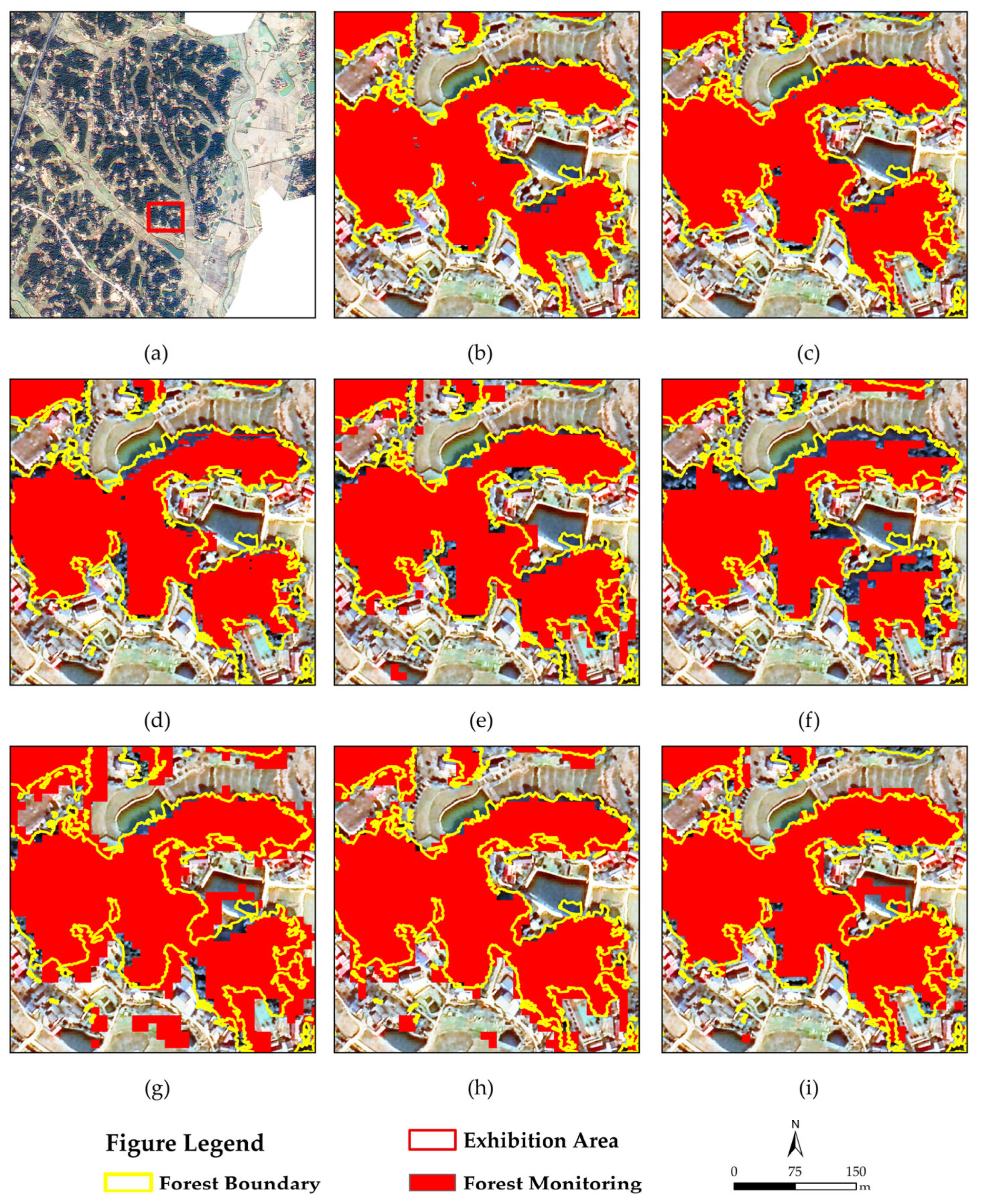
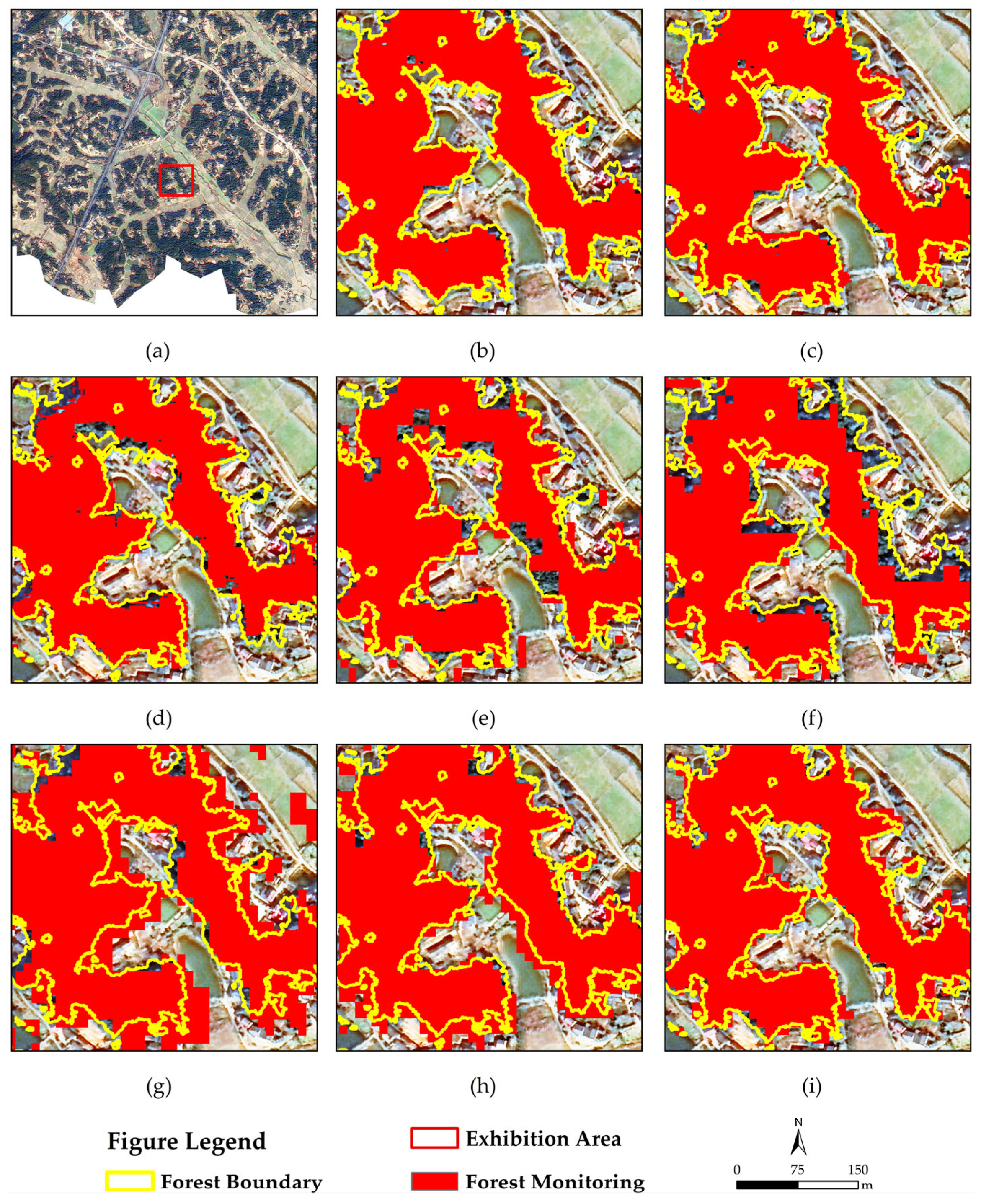
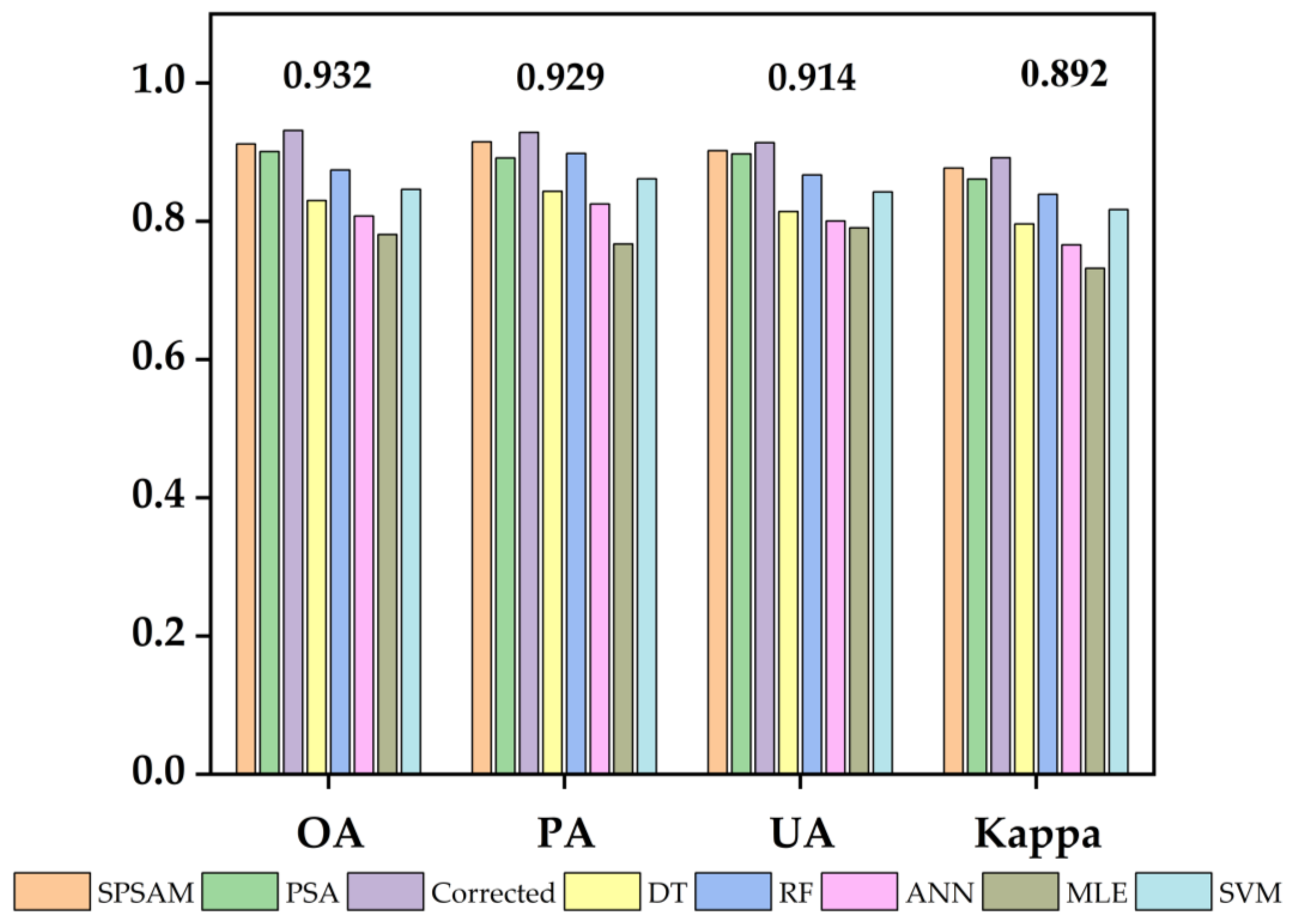
3.3. Results of Sub-Pixel Mapping before and after Correction
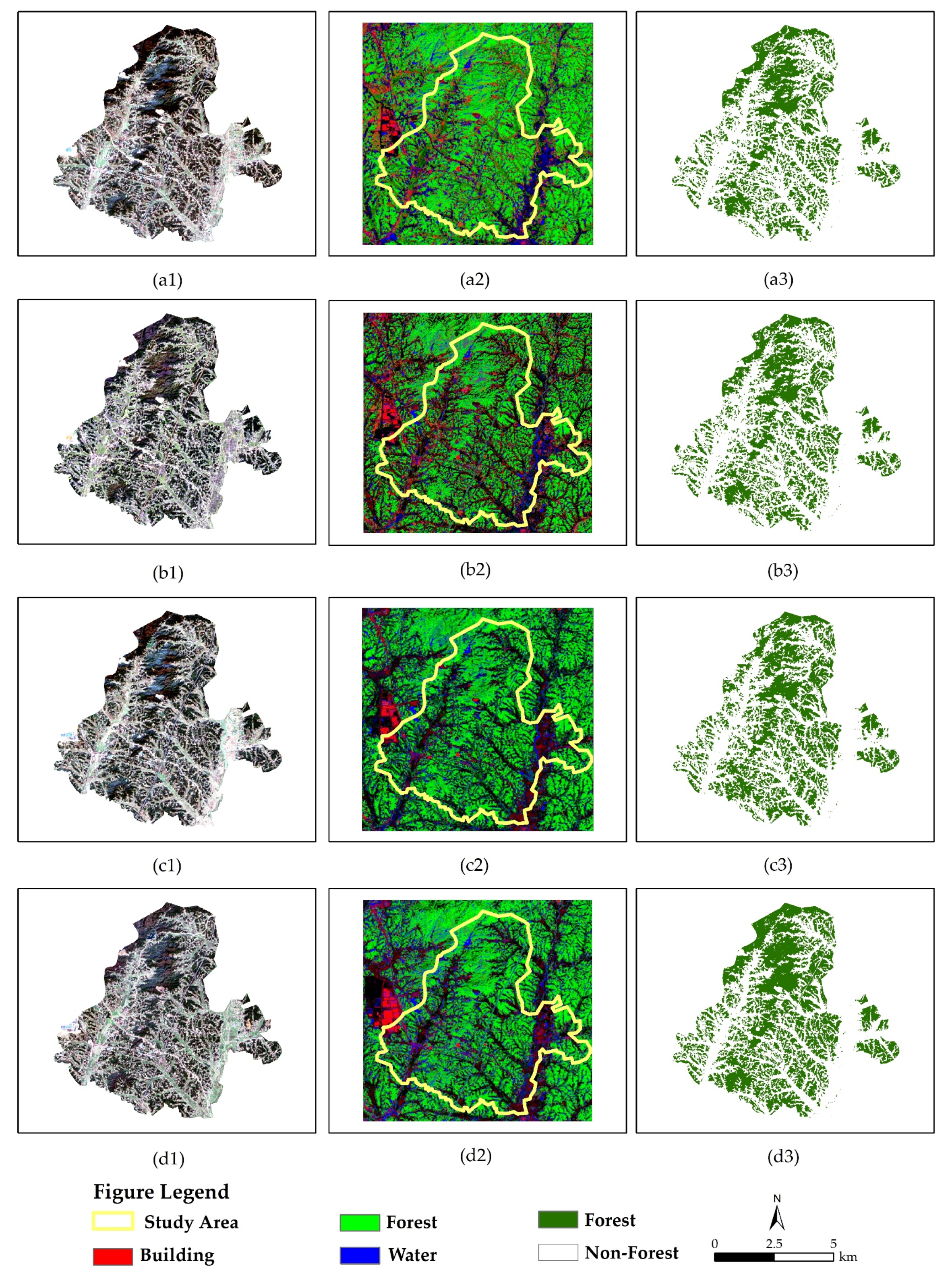
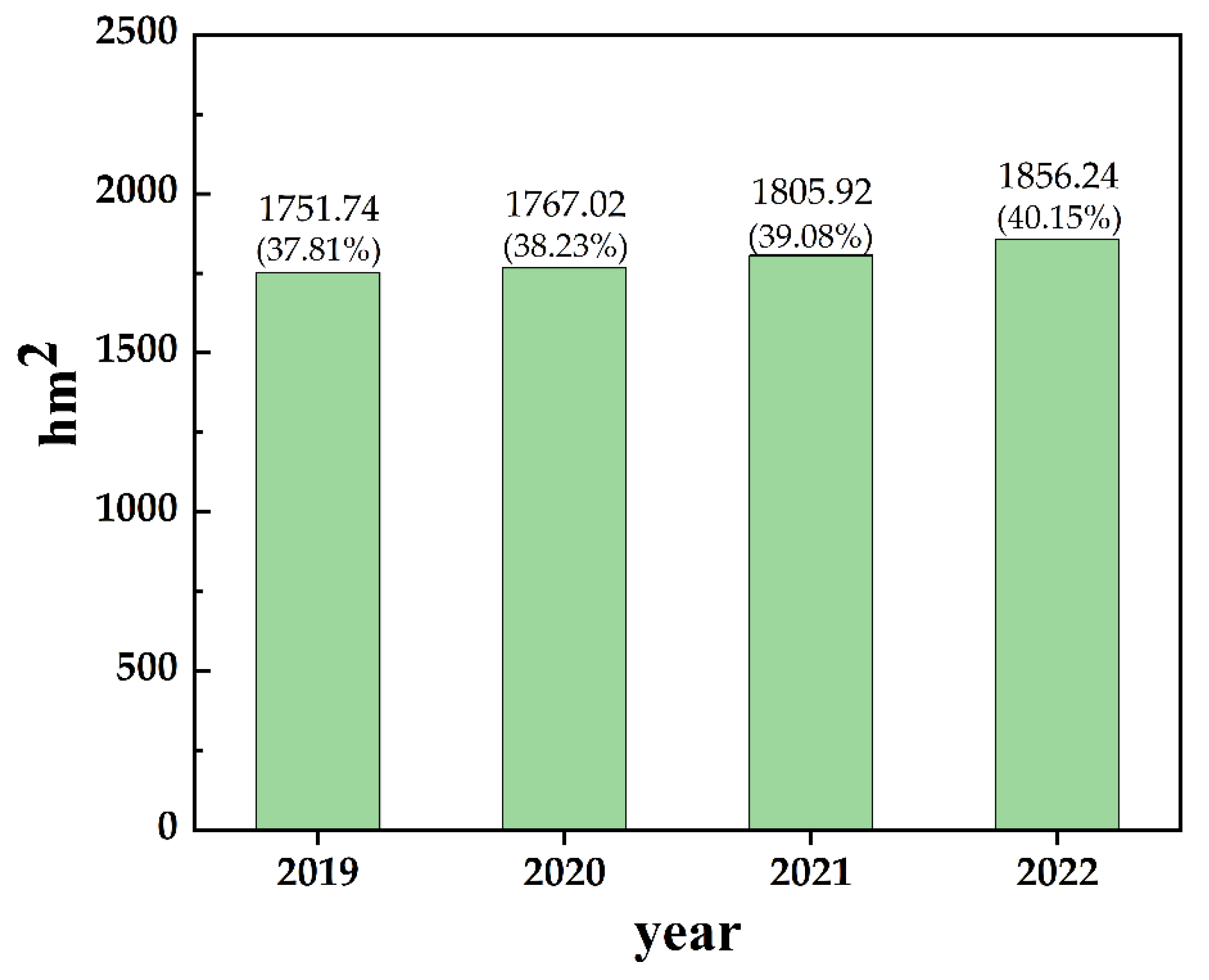
3.4. Sub-Pixel-Level Continuous Monitoring of Forest Cover Change
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mononen, L.; Auvinen, A.-P.; Ahokumpu, A.-L.; Rönkä, M.; Aarras, N.; Tolvanen, H.; Kamppinen, M.; Viirret, E.; Kumpula, T.; Vihervaara, P. National Ecosystem Service Indicators: Measures of Social–Ecological Sustainability. Ecol. Indic. 2016, 61, 27–37. [Google Scholar] [CrossRef]
- Nesha, K.; Herold, M.; De Sy, V.; Duchelle, A.E.; Martius, C.; Branthomme, A.; Garzuglia, M.; Jonsson, O.; Pekkarinen, A. An Assessment of Data Sources, Data Quality and Changes in National Forest Monitoring Capacities in the Global Forest Resources Assessment 2005–2020. Environ. Res. Lett. 2021, 16, 054029. [Google Scholar] [CrossRef]
- He, Y.; Jia, K.; Wei, Z. Improvements in Forest Segmentation Accuracy Using a New Deep Learning Architecture and Data Augmentation Technique. Remote Sens. 2023, 15, 2412. [Google Scholar] [CrossRef]
- Loranty, M.; Davydov, S.; Kropp, H.; Alexander, H.; Mack, M.; Natali, S.; Zimov, N. Vegetation Indices Do Not Capture Forest Cover Variation in Upland Siberian Larch Forests. Remote Sens. 2018, 10, 1686. [Google Scholar] [CrossRef]
- Tlig, L.; Bouchouicha, M.; Tlig, M.; Sayadi, M.; Moreau, E. A Fast Segmentation Method for Fire Forest Images Based on Multiscale Transform and PCA. Sensors 2020, 20, 6429. [Google Scholar] [CrossRef] [PubMed]
- Beguet, B.; Chehata, N.; Boukir, S.; Guyon, D. Classification of Forest Structure Using Very High Resolution Pleiades Image Texture. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2324–2327. [Google Scholar]
- Chehata, N.; Orny, C.; Boukir, S.; Guyon, D. Object-Based Forest Change Detection Using High Resolution Satellite Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 38, 49–54. [Google Scholar] [CrossRef]
- Heckel, K.; Urban, M.; Schratz, P.; Mahecha, M.; Schmullius, C. Predicting Forest Cover in Distinct Ecosystems: The Potential of Multi-Source Sentinel-1 and -2 Data Fusion. Remote Sens. 2020, 12, 302. [Google Scholar] [CrossRef]
- Liang, J.; Ren, C.; Li, Y.; Yue, W.; Wei, Z.; Song, X.; Zhang, X.; Yin, A.; Lin, X. Using Enhanced Gap-Filling and Whittaker Smoothing to Reconstruct High Spatiotemporal Resolution NDVI Time Series Based on Landsat 8, Sentinel-2, and MODIS Imagery. ISPRS Int. J. Geo-Inf. 2023, 12, 214. [Google Scholar] [CrossRef]
- Matsushita, B.; Yang, W.; Chen, J.; Onda, Y.; Qiu, G. Sensitivity of the Enhanced Vegetation Index (EVI) and Normalized Difference Vegetation Index (NDVI) to Topographic Effects: A Case Study in High-Density Cypress Forest. Sensors 2007, 7, 2636–2651. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Zhu, Y.; Yao, X.; Tian, Y.; Liu, X.; Cao, W. Analysis of Common Canopy Vegetation Indices for Indicating Leaf Nitrogen Accumulations in Wheat and Rice. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 1–10. [Google Scholar] [CrossRef]
- Coladello, L.F.; de Lourdes Bueno Trindade Galo, M.; Shimabukuro, M.H.; Ivánová, I.; Awange, J. Macrophytes’ Abundance Changes in Eutrophicated Tropical Reservoirs Exemplified by Salto Grande (Brazil): Trends and Temporal Analysis Exploiting Landsat Remotely Sensed Data. Appl. Geogr. 2020, 121, 102242. [Google Scholar] [CrossRef]
- Al-Ani, L.A.A.; Al-Taei, M.S.M. Multi-Band Image Classification Using Klt and Fractal Classifier. J. Al-Nahrain Univ. Sci. 2011, 14, 171–178. [Google Scholar] [CrossRef]
- Rahman, S.; Mesev, V. Change Vector Analysis, Tasseled Cap, and NDVI-NDMI for Measuring Land Use/Cover Changes Caused by a Sudden Short-Term Severe Drought: 2011 Texas Event. Remote Sens. 2019, 11, 2217. [Google Scholar] [CrossRef]
- Franklin, S.E.; Hall, R.J.; Moskal, L.M.; Maudie, A.J.; Lavigne, M.B. Incorporating Texture into Classification of Forest Species Composition from Airborne Multispectral Images. Int. J. Remote Sens. 2000, 21, 61–79. [Google Scholar] [CrossRef]
- Zawadzki, J.; Cieszewski, C.; Zasada, M.; Lowe, R. Applying Geostatistics for Investigations of Forest Ecosystems Using Remote Sensing Imagery. Silva Fenn. 2005, 39, 599. [Google Scholar] [CrossRef]
- Gibson, R.K.; Mitchell, A.; Chang, H.-C. Image Texture Analysis Enhances Classification of Fire Extent and Severity Using Sentinel 1 and 2 Satellite Imagery. Remote Sens. 2023, 15, 3512. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, C.; Liu, X.; Zhu, L.; Yang, Q.; Wang, Q.; Zhang, Q.; Meng, Y. Object-Based Change Detection for Vegetation Disturbance and Recovery Using Landsat Time Series. GISci. Remote Sens. 2022, 59, 1706–1721. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of Machine-Learning Classification in Remote Sensing: An Applied Review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Brovelli, M.A.; Sun, Y.; Yordanov, V. Monitoring Forest Change in the Amazon Using Multi-Temporal Remote Sensing Data and Machine Learning Classification on Google Earth Engine. ISPRS Int. J. Geo-Inf. 2020, 9, 580. [Google Scholar] [CrossRef]
- Yao, B.; Zhang, H.Q.; Liu, Y.; Liu, H.; Ling, C.S. Remote Sensing Classification of Wetlands based on Object-oriented and CART Decision Tree Method. For. Res. 2019, 32, 91–98. [Google Scholar] [CrossRef]
- Sisodia, P.S.; Tiwari, V. Analysis of Supervised Maximum Likelihood Classification for Remote Sensing Image. In Proceedings of the International Conference on Recent Advances and Innovations in Engineering (ICRAIE-2014), Jaipur, India, 9–11 May 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Dahiya, N.; Singh, S.; Gupta, S.; Rajab, A.; Hamdi, M.; Elmagzoub, M.; Sulaiman, A.; Shaikh, A. Detection of Multitemporal Changes with Artificial Neural Network-Based Change Detection Algorithm Using Hyperspectral Dataset. Remote Sens. 2023, 15, 1326. [Google Scholar] [CrossRef]
- Bazi, Y.; Melgani, F. Toward an Optimal SVM Classification System for Hyperspectral Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3374–3385. [Google Scholar] [CrossRef]
- Wang, X.; Gao, X.; Zhang, Y.; Fei, X.; Chen, Z.; Wang, J.; Zhang, Y.; Lu, X.; Zhao, H. Land-Cover Classification of Coastal Wetlands Using the RF Algorithm for Worldview-2 and Landsat 8 Images. Remote Sens. 2019, 11, 1927. [Google Scholar] [CrossRef]
- Feng, S.; Fan, F. Analyzing the Effect of the Spectral Interference of Mixed Pixels Using Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1434–1446. [Google Scholar] [CrossRef]
- Xu, X.; Tong, X.; Plaza, A.; Li, J.; Zhong, Y.; Xie, H.; Zhang, L. A New Spectral-Spatial Sub-Pixel Mapping Model for Remotely Sensed Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6763–6778. [Google Scholar] [CrossRef]
- Su, L.; Xu, Y.; Yuan, Y.; Yang, J. Combining Pixel Swapping and Simulated Annealing for Land Cover Mapping. Sensors 2020, 20, 1503. [Google Scholar] [CrossRef]
- Mertens, K.C.; de Baets, B.; Verbeke, L.P.C.; de Wulf, R.R. A Sub-pixel Mapping Algorithm Based on Sub-pixel/Pixel Spatial Attraction Models. Int. J. Remote Sens. 2006, 27, 3293–3310. [Google Scholar] [CrossRef]
- Kasetkasem, T.; Rakwatin, P.; Sirisommai, R.; Eiumnoh, A. A Joint Land Cover Mapping and Image Registration Algorithm Based on a Markov Random Field Model. Remote Sens. 2013, 5, 5089–5121. [Google Scholar] [CrossRef]
- He, D.; Zhong, Y.; Feng, R.; Zhang, L. Spatial-Temporal Sub-Pixel Mapping Based on Swarm Intelligence Theory. Remote Sens. 2016, 8, 894. [Google Scholar] [CrossRef]
- Liu, C.; Shi, J.; Liu, X.; Shi, Z.; Zhu, J. Subpixel Mapping of Surface Water in the Tibetan Plateau with MODIS Data. Remote Sens. 2020, 12, 1154. [Google Scholar] [CrossRef]
- Hu, D.; Chen, S.; Qiao, K.; Cao, S. Integrating CART Algorithm and Multi-Source Remote Sensing Data to Estimate Sub-Pixel Impervious Surface Coverage: A Case Study from Beijing Municipality, China. Chin. Geogr. Sci. 2017, 27, 614–625. [Google Scholar] [CrossRef]
- Wickramasinghe, C.; Jones, S.; Reinke, K.; Wallace, L. Development of a Multi-Spatial Resolution Approach to the Surveillance of Active Fire Lines Using Himawari-8. Remote Sens. 2016, 8, 932. [Google Scholar] [CrossRef]
- Ruescas, A.B.; Sobrino, J.A.; Julien, Y.; Jiménez-Muñoz, J.C.; Sòria, G.; Hidalgo, V.; Atitar, M.; Franch, B.; Cuenca, J.; Mattar, C. Mapping Sub-Pixel Burnt Percentage Using AVHRR Data. Application to the Alcalaten Area in Spain. Int. J. Remote Sens. 2010, 31, 5315–5330. [Google Scholar] [CrossRef]
- Grivei, A.-C.; Vaduva, C.; Datcu, M. Assessment of Burned Area Mapping Methods for Smoke Covered Sentinel-2 Data. In Proceedings of the 2020 13th International Conference on Communications (COMM), Bucharest, Romania, 18–20 June 2020; pp. 189–192. [Google Scholar]
- Jiang, L.; Zhou, C.; Li, X. Sub-Pixel Surface Water Mapping for Heterogeneous Areas from Sentinel-2 Images: A Case Study in the Jinshui Basin, China. Water 2023, 15, 1446. [Google Scholar] [CrossRef]
- Li, L.; Chen, Y.; Xu, T.; Shi, K.; Liu, R.; Huang, C.; Lu, B.; Meng, L. Remote Sensing of Wetland Flooding at a Sub-Pixel Scale Based on Random Forests and Spatial Attraction Models. Remote Sens. 2019, 11, 1231. [Google Scholar] [CrossRef]
- Chen, Y.; Ge, Y.; An, R.; Chen, Y. Super-Resolution Mapping of Impervious Surfaces from Remotely Sensed Imagery with Points-of-Interest. Remote Sens. 2018, 10, 242. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, G.; Zhou, Z.; Zhou, X.; Zhou, C. Forest Fire Monitoring and Positioning Improvement at Subpixel Level: Application to Himawari-8 Fire Products. Remote Sens. 2022, 14, 2460. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, G.; Zhou, Z.; Zhou, X.; Zhang, J.; Zhou, C. Development of a Novel Burned-Area Subpixel Mapping (BASM) Workflow for Fire Scar Detection at Subpixel Level. Remote Sens. 2022, 14, 3546. [Google Scholar] [CrossRef]
- Li, X.; Zhang, G.; Tan, S.; Yang, Z.; Wu, X. Forest Fire Smoke Detection Research Based on the Random Forest Algorithm and Sub-Pixel Mapping Method. Forests 2023, 14, 485. [Google Scholar] [CrossRef]
- Song, T.; Tang, B.; Zhao, M.; Deng, L. An Accurate 3-D Fire Location Method Based on Sub-Pixel Edge Detection and Non-Parametric Stereo Matching. Measurement 2014, 50, 160–171. [Google Scholar] [CrossRef]
- Kupfer, B.; Netanyahu, N.S.; Shimshoni, I. An Efficient SIFT-Based Mode-Seeking Algorithm for Sub-Pixel Registration of Remotely Sensed Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 379–383. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Z.; Yang, C.; Ye, S.H. Sub-Pixel Edge Estimation Based on Matching Template. In Proceedings of the International Conference of Optical Instrument and Technology, Beijing, China, 16–19 November 2008; SPIE: Bellingham, WA, USA, 2008; p. 71602A. [Google Scholar]
- Nghiyalwa, H.S.; Urban, M.; Baade, J.; Smit, I.P.J.; Ramoelo, A.; Mogonong, B.; Schmullius, C. Spatio-Temporal Mixed Pixel Analysis of Savanna Ecosystems: A Review. Remote Sens. 2021, 13, 3870. [Google Scholar] [CrossRef]
- Yin, C.L.; Meng, F.; Yu, Q.R. Calculation of Land Surface Emissivity and Retrieval of Land Surface Temperature Based on a Spectral Mixing Model. Infrared Phys. Technol. 2020, 108, 103333. [Google Scholar] [CrossRef]
- Belgiu, M.; Stein, A. Spatiotemporal Image Fusion in Remote Sensing. Remote Sens. 2019, 11, 818. [Google Scholar] [CrossRef]
- Jones, J. Improved Automated Detection of Subpixel-Scale Inundation—Revised Dynamic Surface Water Extent (DSWE) Partial Surface Water Tests. Remote Sens. 2019, 11, 374. [Google Scholar] [CrossRef]
- Heinz, D.C.; Chang, C.-I. Fully Constrained Least Squares Linear Spectral Mixture Analysis Method for Material Quantification in Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 529–545. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, L.; Liu, D. Integration of Spatial Attractions between and within Pixels for Sub-Pixel Mapping. J. Syst. Eng. Electron. 2012, 23, 293–303. [Google Scholar] [CrossRef]
- Zhao, C.; Yang, H.; Zhu, H.; Yan, Y. Sub-Pixel Mapping of Remote Sensing Images Based on Sub-Pixel/Pixel Spatial Attraction Models with Anisotropic Spatial Dependence Model. In Proceedings of the 2017 First International Conference on Electronics Instrumentation & Information Systems (EIIS), Harbin, China, 3–5 June 2017; pp. 1–5. [Google Scholar]
- Bijeesh, T.V.; Narasimhamurthy, K.N. Surface Water Detection and Delineation Using Remote Sensing Images: A Review of Methods and Algorithms. Sustain. Water Resour. Manag. 2020, 6, 68. [Google Scholar] [CrossRef]
- Kaur, S.; Bansal, R.K.; Mittal, M.; Goyal, L.M.; Kaur, I.; Verma, A.; Son, L.H. Mixed Pixel Decomposition Based on Extended Fuzzy Clustering for Single Spectral Value Remote Sensing Images. J. Indian Soc. Remote Sens. 2019, 47, 427–437. [Google Scholar] [CrossRef]
- Wang, Q.; Ding, X.; Tong, X.; Atkinson, P.M. Spatio-Temporal Spectral Unmixing of Time-Series Images. Remote Sens. Environ. 2021, 259, 112407. [Google Scholar] [CrossRef]
- Msellmi, B.; Picone, D.; Ben Rabah, Z.; Dalla Mura, M.; Farah, I.R. Sub-Pixel Mapping Model Based on Total Variation Regularization and Learned Spatial Dictionary. Remote Sens. 2021, 13, 190. [Google Scholar] [CrossRef]
- Li, X.; Chen, R.; Foody, G.M.; Wang, L.; Yang, X.; Du, Y.; Ling, F. Spatio-Temporal Sub-Pixel Land Cover Mapping of Remote Sensing Imagery Using Spatial Distribution Information From Same-Class Pixels. Remote Sens. 2020, 12, 503. [Google Scholar] [CrossRef]
- He, D.; Zhong, Y.; Zhang, L. Spectral–Spatial–Temporal MAP-Based Sub-Pixel Mapping for Land-Cover Change Detection. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1696–1717. [Google Scholar] [CrossRef]
- Wang, X.; Ling, F.; Yao, H.; Liu, Y.; Xu, S. Unsupervised Sub-Pixel Water Body Mapping with Sentinel-3 OLCI Image. Remote Sens. 2019, 11, 327. [Google Scholar] [CrossRef]
- Liu, Q.; Trinder, J.; Turner, I. A comparison of sub-pixel mapping methods for coastal areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-7, 67–74. [Google Scholar] [CrossRef]
- Panigrahi, N.; Tiwari, A.; Dixit, A. Image Pan-Sharpening and Sub-Pixel Classification Enabled Building Detection in Strategically Challenged Forest Neighborhood Environment. J. Indian Soc. Remote Sens. 2021, 49, 2113–2123. [Google Scholar] [CrossRef]
- Patidar, N.; Keshari, A.K. A Rule-Based Spectral Unmixing Algorithm for Extracting Annual Time Series of Sub-Pixel Impervious Surface Fraction. Int. J. Remote Sens. 2020, 41, 3970–3992. [Google Scholar] [CrossRef]
- Taureau, F.; Robin, M.; Proisy, C.; Fromard, F.; Imbert, D.; Debaine, F. Mapping the Mangrove Forest Canopy Using Spectral Unmixing of Very High Spatial Resolution Satellite Images. Remote Sens. 2019, 11, 367. [Google Scholar] [CrossRef]
- Cavalli, R.M. Spatial Validation of Spectral Unmixing Results: A Case Study of Venice City. Remote Sens. 2022, 14, 5165. [Google Scholar] [CrossRef]
- Ling, F.; Li, X.; Xiao, F.; Fang, S.; Du, Y. Object-Based Sub-Pixel Mapping of Buildings Incorporating the Prior Shape Information from Remotely Sensed Imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 283–292. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, C.; Atkinson, P.M. Sub-Pixel Mapping with Point Constraints. Remote Sens. Environ. 2020, 244, 111817. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Sensor | Band Number | Central Wavelength (µm) | Spatial Resolution (m) |
|---|---|---|---|---|
| Sentinel-2 | MSI | B2 | 0.49 | 10 |
| B3 | 0.56 | 10 | ||
| B4 | 0.67 | 10 | ||
| B5 | 0.70 | 20 | ||
| B6 | 0.74 | 20 | ||
| B7 | 0.78 | 20 | ||
| B8 | 0.84 | 10 | ||
| B11 | 1.61 | 20 | ||
| B12 | 2.19 | 20 | ||
| Jilin-1 | HRMC/HRPC | PAN | 0.64 | 0.75 |
| B1 | 0.49 | 3 | ||
| B2 | 0.55 | 3 | ||
| B3 | 0.65 | 3 | ||
| B4 | 0.83 | 3 | ||
| SuperView-1 | MSS/HRPC | PAN | 0.67 | 0.5 |
| B1 | 0.49 | 2 | ||
| B2 | 0.56 | 2 | ||
| B3 | 0.66 | 2 | ||
| B4 | 0.83 | 2 |
| Model | Parameter Setup | Training Datasets (Pixel) |
|---|---|---|
| DT |
| Forest: 1218 Pixels Water: 1037 Pixels Building: 1209 Pixels Unused Land:1641 Pixels Cultivated Land and Grassland: 1132 Pixels |
| MLE |
| |
| ANN |
| |
| SVM |
| |
| RF |
|
| Forest in Monitoring | Others in Monitoring | |
|---|---|---|
| Forest in Real | True Positive (TP) | False Negative (FN) |
| Other in Real | False Positive (FP) | True Negative (TN) |
| Method | OA (%) | Forest PA (%) | Forest UA (%) | Kappa |
|---|---|---|---|---|
| DT | 82.99% | 84.34% | 81.40% | 0.796 |
| MLE | 78.07% | 76.71% | 79.04% | 0.732 |
| ANN | 80.76% | 83.51% | 80.05% | 0.766 |
| SVM | 84.63% | 86.14% | 83.23% | 0.817 |
| RF | 87.42% | 89.80% | 86.69% | 0.839 |
| Method | OA (%) | Forest PA (%) | Forest UA (%) | Kappa |
|---|---|---|---|---|
| SPSAM before correction | 91.19% | 91.48% | 90.23% | 0.877 |
| SPSAM after correction | 93.15% | 92.86% | 91.37% | 0.892 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, S.; Yang, Z.; Zhang, G.; Wu, X. Forest Cover Change Monitoring Using Sub-Pixel Mapping with Edge-Matching Correction. Forests 2023, 14, 1776. https://doi.org/10.3390/f14091776
Xia S, Yang Z, Zhang G, Wu X. Forest Cover Change Monitoring Using Sub-Pixel Mapping with Edge-Matching Correction. Forests. 2023; 14(9):1776. https://doi.org/10.3390/f14091776
Chicago/Turabian StyleXia, Siran, Zhigao Yang, Gui Zhang, and Xin Wu. 2023. "Forest Cover Change Monitoring Using Sub-Pixel Mapping with Edge-Matching Correction" Forests 14, no. 9: 1776. https://doi.org/10.3390/f14091776
APA StyleXia, S., Yang, Z., Zhang, G., & Wu, X. (2023). Forest Cover Change Monitoring Using Sub-Pixel Mapping with Edge-Matching Correction. Forests, 14(9), 1776. https://doi.org/10.3390/f14091776