
A Multi-Surrogate Assisted Multi-Tasking Optimization Algorithm for High-Dimensional Expensive Problems


Abstract
1. Introduction
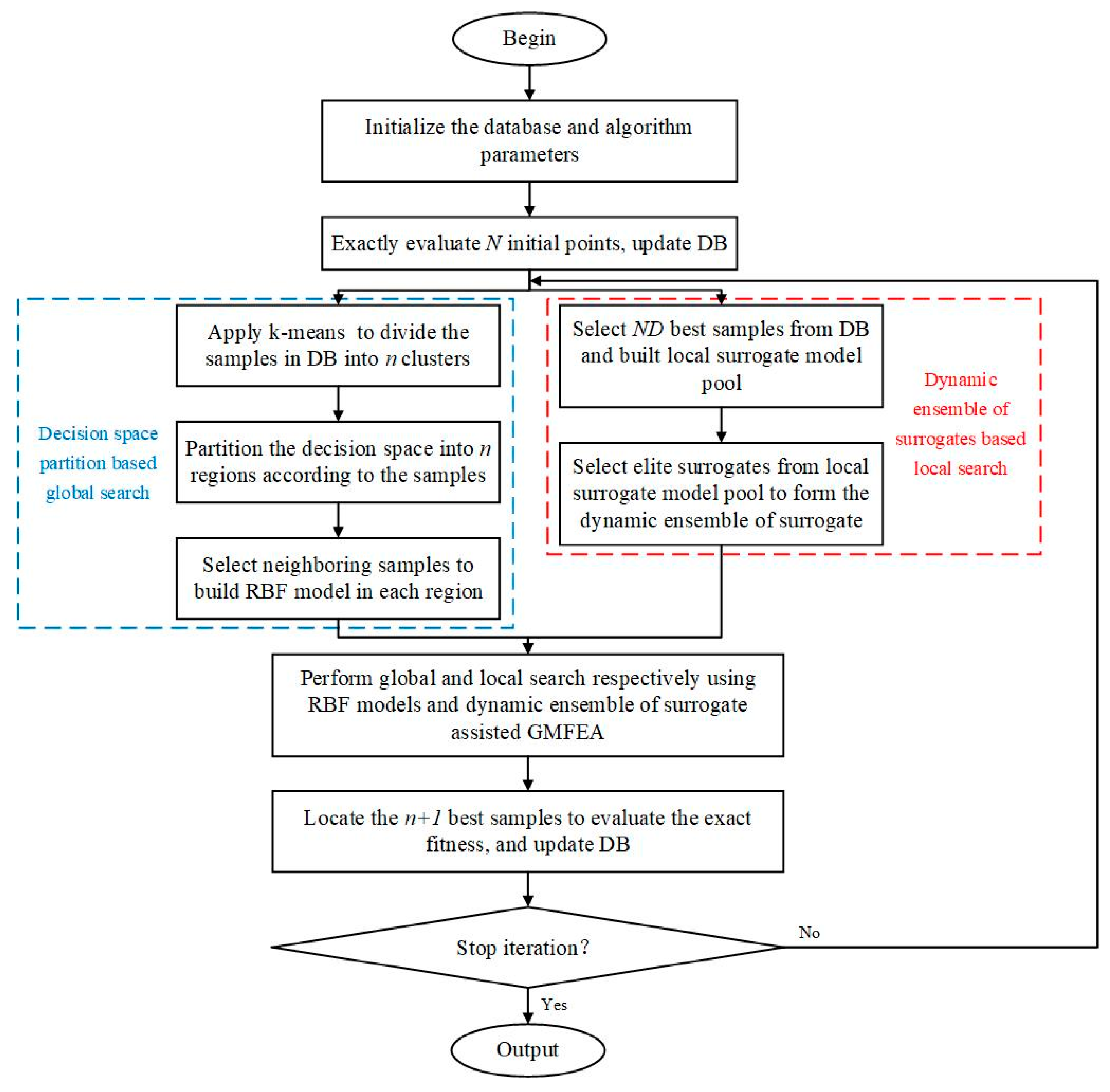
- Under the framework of the G-MFEA, a space partition strategy is used to introduce multiple surrogate models as optimization tasks, and global and local searches are carried out simultaneously so that the algorithm can achieve good exploration and considerably reduce the chance of falling into local optima.
- A novel dynamic ensemble of surrogates is proposed. In this adaptive strategy, a single surrogate or an ensemble of two surrogates or three surrogates is selected as a local model from the base model pool (including RBF, polynomial response surface (PRS), and support vector regression (SVR)) according to the error index, thus accelerating the convergence.
- Experimental results indicate that the proposed algorithm has better performance than the competition algorithm in most of the test functions and a truss design problem, resulting in better results and faster convergence processes.
2. Materials and Methods
2.1. Polynomial Response Surface
2.2. Radial Basis Function
2.3. Support Vector Regression
2.4. Dynamic Ensemble of Surrogates
2.5. Multi-Factorial Evolutionary Algorithm
2.6. Methodology
2.6.1. The General Framework of the MSAMT Method
| Algorithm 1 Pseudocode of the MSAMT algorithm |
| Input: , problem dimension; , initial population size; , population size of dynamic ensemble of surrogates; , evolutionary population size; DB, database; , the number of exact evaluations; , the maximum number of exact evaluations; , the real objective function; , the number of clusters; rmp, matching probability; , the maximum number for each running of multitasking optimization; |
| Output: the position of the best individual and its fitness value; |
| 1: Generate initial samples by LHS; |
| 2: Evaluate exactly initial samples by the real objective function and save them to the DB; |
| 3: while , do |
| 4: //Decision space partition based global search |
| 5: Randomly select samples from the DB as clustering centers; |
| 6: Calculate the distance between all samples in the DB and each clustering center and assign each sample to the clustering center nearest to it; |
| 7: Calculate the mean of each cluster as the new clustering center; |
| 8: Repeat rows 6 and 7 until the new center is unchanged from the original center and output central position; |
| 9: for to , do |
| 10: Calculate the according to Equation (14); |
| 11: end for |
| 12: Determine in which region each of the samples in the database is located; |
| 13: for to , do |
| 14: if the number of exactly evaluated samples distributed in the th region is larger than , then |
| 15: Select all exactly evaluated samples in the th region to construct the RBF surrogate model; |
| 16: else |
| 17: Select the neighboring exactly evaluated samples to the th region to construct the RBF surrogate model; |
| 18: end if |
| 19: end for |
| 20: //Dynamic ensemble of surrogates based local search |
| 21: Apply Algorithm 2 to construct a dynamic ensemble of surrogates; |
| 22: //Perform global and local searches using RBF models and the dynamic ensemble of the surrogate-assisted G-MFEA, respectively; |
| 23: Apply Algorithm 3 to generate an evolutionary population and let ; |
| 24: Apply Algorithm 4 to perform multi-tasking optimization; |
| 25: Locate the individuals having better predicted fitness; |
| 26: Evaluate the real fitness value of the best individuals and save them to the DB; |
| 27: ; |
| 28: end while |
| Algorithm 2 Pseudocode for the dynamic ensemble of surrogates |
| Input: , population size of the dynamic ensemble of surrogates; DB, database; |
| Output: the dynamic ensemble of surrogates; |
| 1: Apply -fold cross validation (fivefold cross-validation is adopted in this paper) to best samples in the DB and build a pool of different single surrogate models (denoted as ); |
| 2: Compute the error metrics ( and ) of these surrogates according to Equations (11) and (12); |
| 3: Sort the and of these surrogates in ascending order and add the corresponding indices; |
| 4: Add the and the indices for each surrogate together to obtain the final ranking indicator for all surrogates (denoted as ); |
| 5: if is not empty, then |
| 6: Remove the other surrogates from and then use the single surrogate model with the ranking indicator of 2; |
| 7: else is not empty |
| 8: if there are two surrogates with the ranking indicator of 3, then |
| 9: Remove the other surrogate from and formulate the two surrogates with the ranking indicator of 3 into an ensemble surrogate using the UES; |
| 10: end if |
| 11: else |
| 12: Formulate the three surrogates into an ensemble surrogate using the UES; |
| 13: end if |
| Algorithm 3 Pseudocode for multi-tasking optimization |
| Input: , evolutionary population; , evolutionary population size; , the maximum number for each running of multi-tasking optimization; , the global surrogate model; , the local surrogate model; , the frequency to change the translation direction; , the threshold value to start the decision variable translation strategy; |
| Output: the optimal solutions of surrogate models; |
| 1: Apply Algorithm 4 to generate the evolutionary population and let ; |
| 2: Predict the fitness of each individual in with the RBF surrogates and the ensemble surrogate; |
| 3: Compute the skill factor () of each individual; |
| 4: while , do |
| 5: Randomize the individuals in ; |
| 6: for to , do |
| 7: Select two parent candidates and from ; |
| 8: Generate a random number , , and between 0 and 1; |
| 9: if or , then |
| 10: Parents and crossover to give two offspring individuals and ; |
| 11: else |
| 12: Mutate parent slightly to give an offspring . |
| 13: Mutate parent slightly to give an offspring ; |
| 14: end if |
| 15: Assign skill factors by parent candidates to offspring through vertical cultural transmission; |
| 16: if and , then |
| 17: Calculate the translated direction of each task; |
| 18: end if |
| 19: Update the position of each offspring according to the translated direction of its corresponding task; |
| 20: end for |
| 21: Predict the fitness of each offspring with the RBF surrogates and the ensemble surrogate and select better individuals as next parents; |
| 22: ; |
| 23: end while |
| Algorithm 4 Pseudocode for generating the evolutionary population |
| Input: , evolutionary population size; DB, database; , the number of samples in the DB; |
| Output: the evolutionary population ; |
| 1: If , then |
| 2: Add all samples from the DB to ; |
| 3: Generate individuals by LHS and add them to ; |
| 4: else |
| 5: If , then |
| 6: Add the first sample from the DB to ; |
| 7: Randomly select samples from other samples in the DB and add them to ; |
| 8: else |
| 9: Add the first sample from the DB to ; |
| 10: Randomly select samples from 1 to in the DB and add them to ; |
| 11: end if |
| 12: Generate individuals by LHS and add them to ; |
| 13: end if |
2.6.2. The Global and Local Models
2.6.3. Multi-Tasking Optimization Based on Decision Space Partition and a Dynamic Ensemble of Surrogates
3. Results and Discussion
3.1. Test Problems
3.2. Parameter Settings
3.3. Behavior Study of the MSAMT
3.3.1. Effect of the Clusters Number
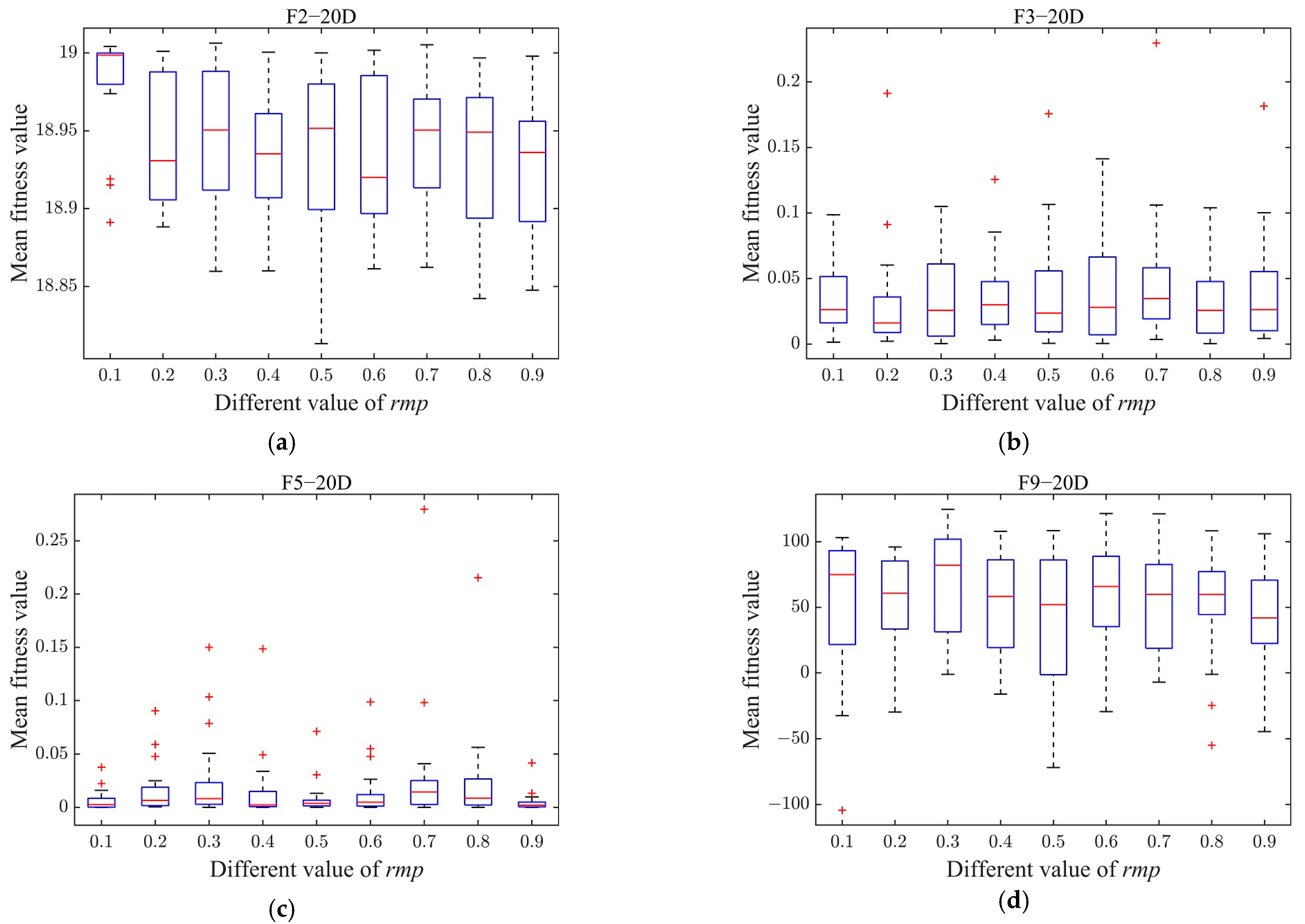
3.3.2. Effect of Matching Probability on Multi-Tasking Optimization
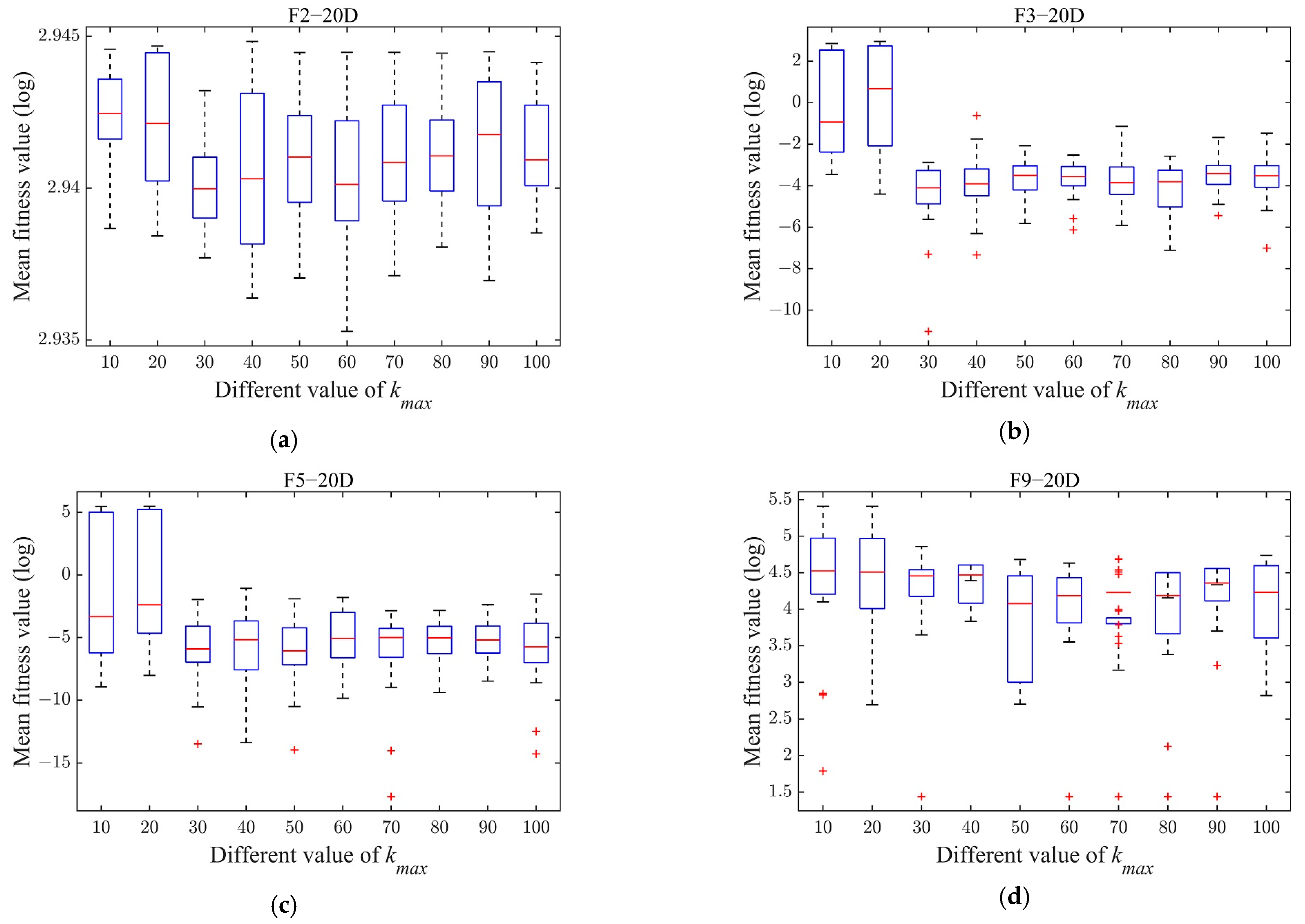
3.3.3. Effect of the Maximum Generation Number for Each Running of the G-MFEA
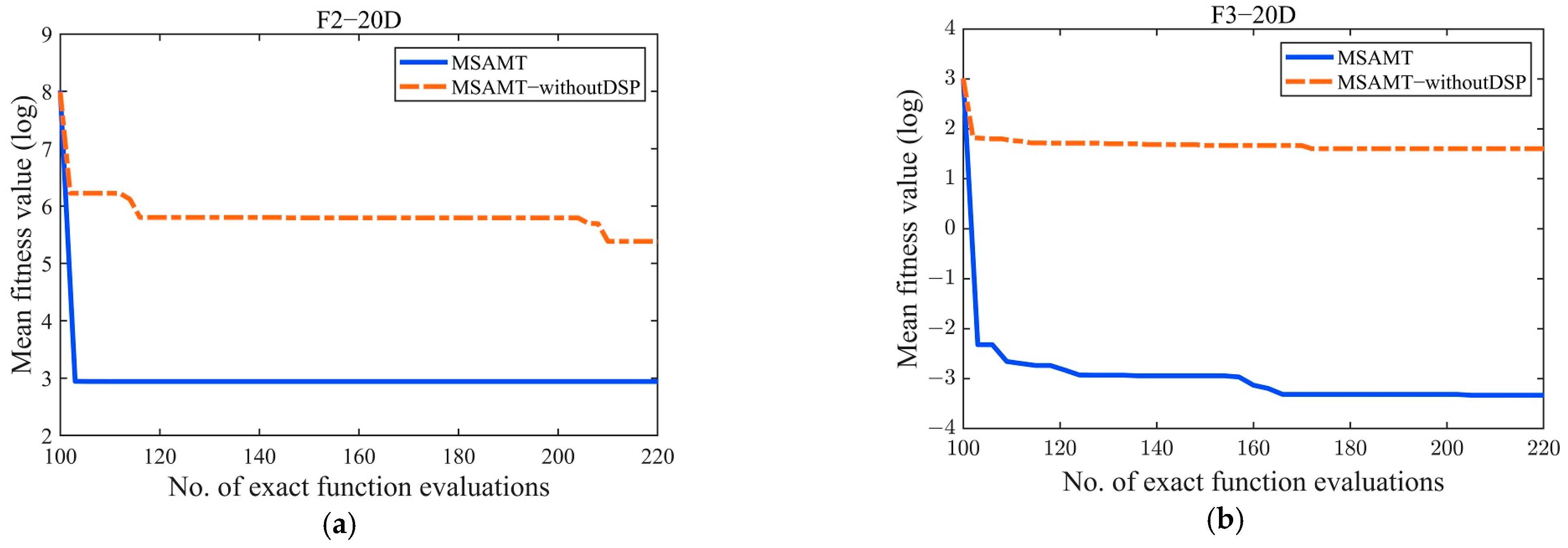
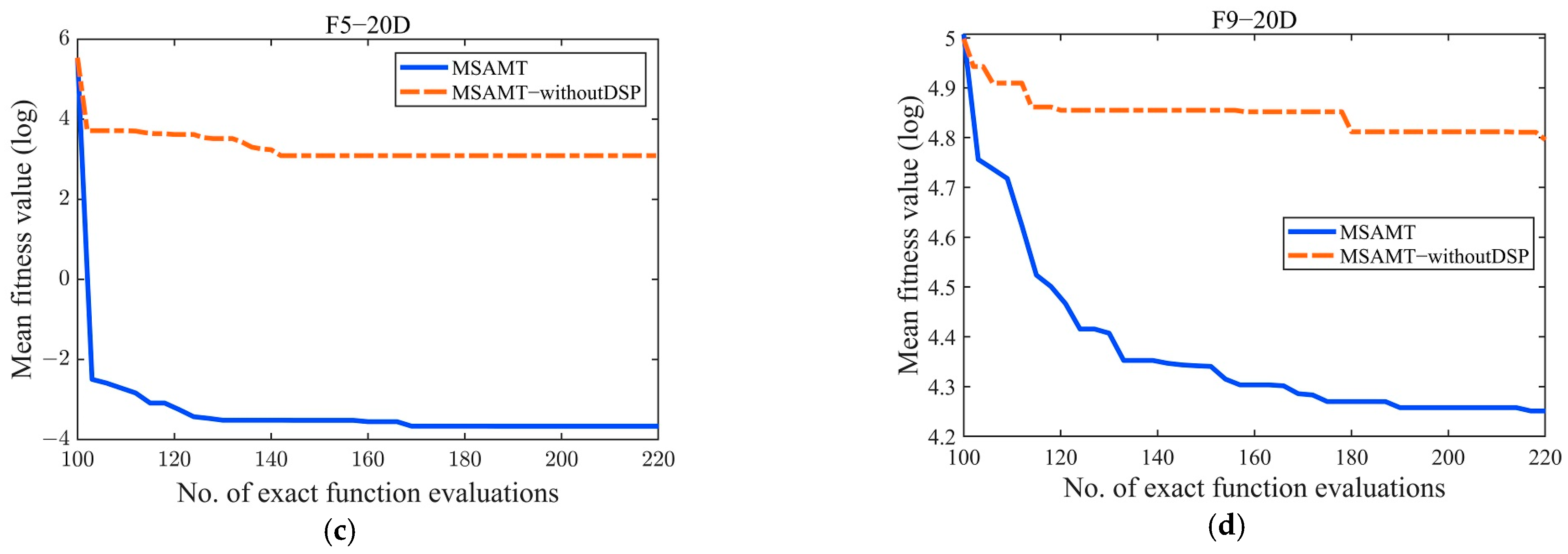
3.3.4. Effect of the Decision Space Partition
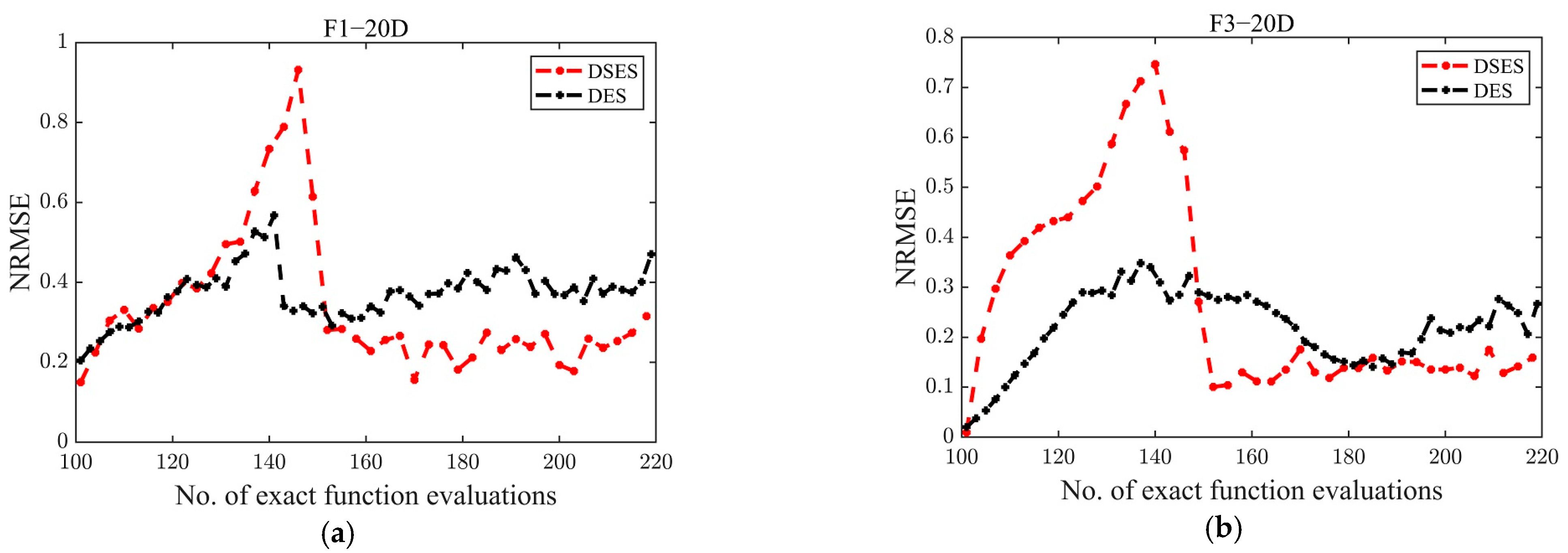
3.3.5. Effect of the DSES
3.4. Comparison with Other Recently Proposed Algorithms
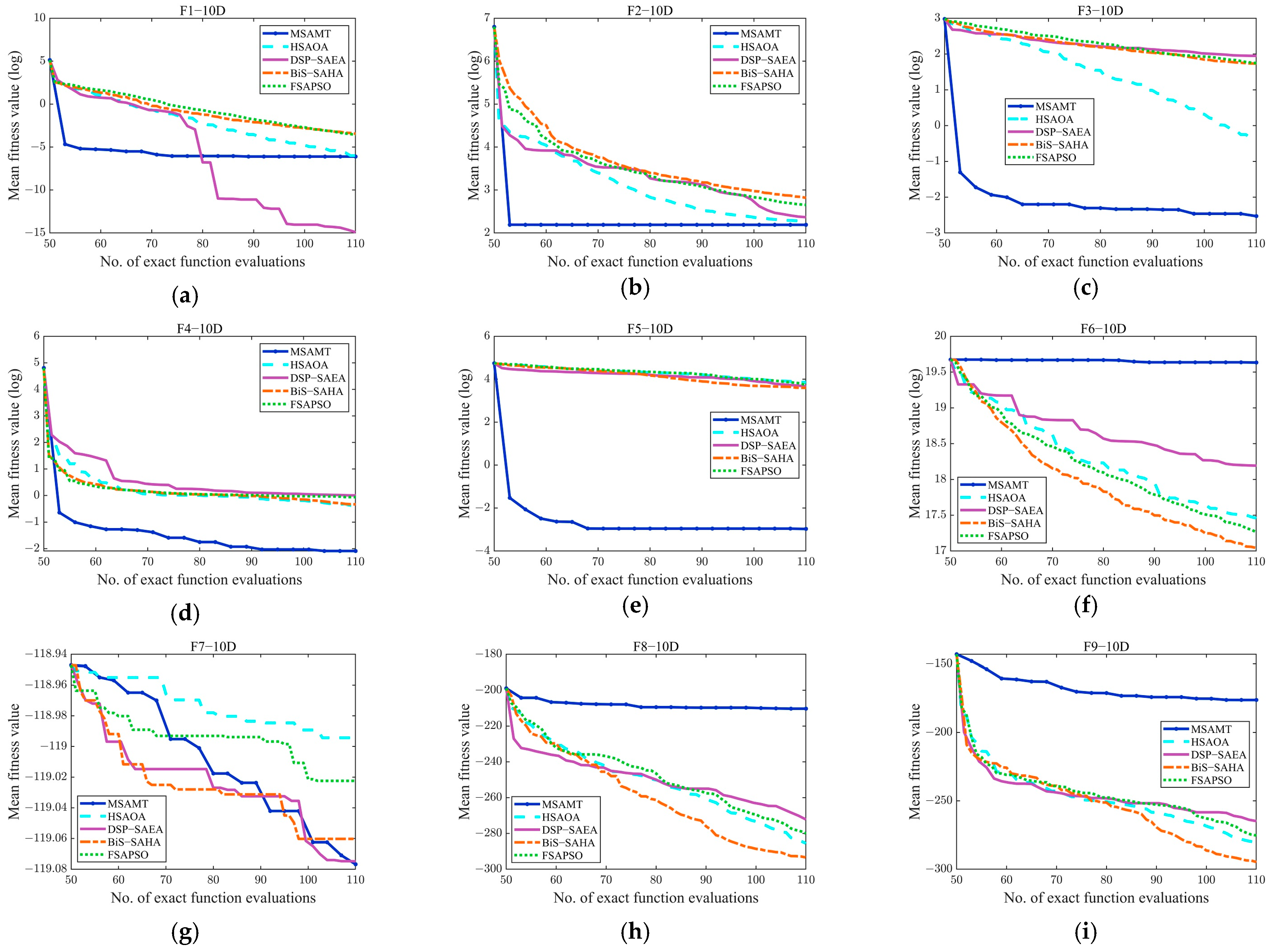
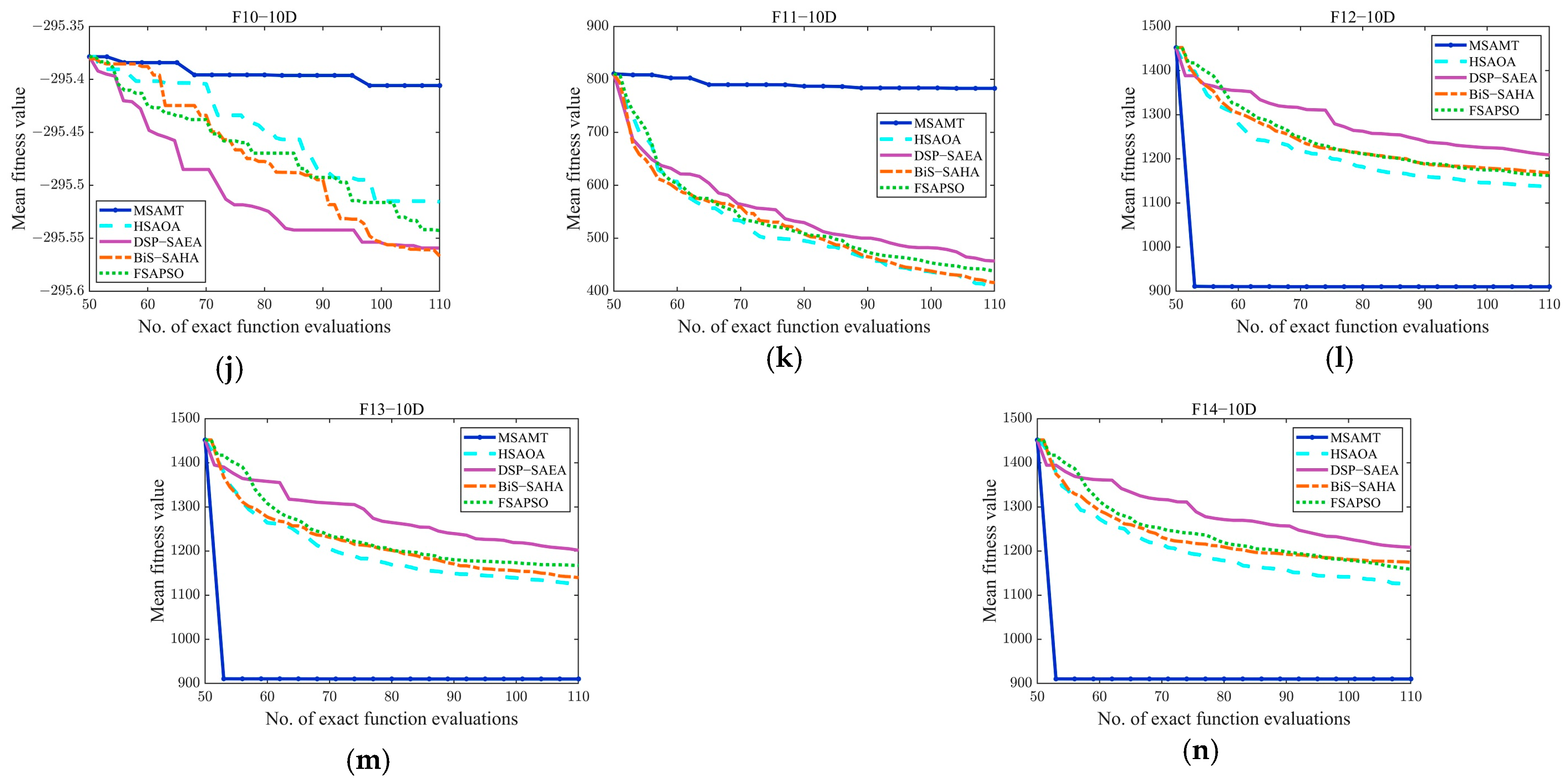
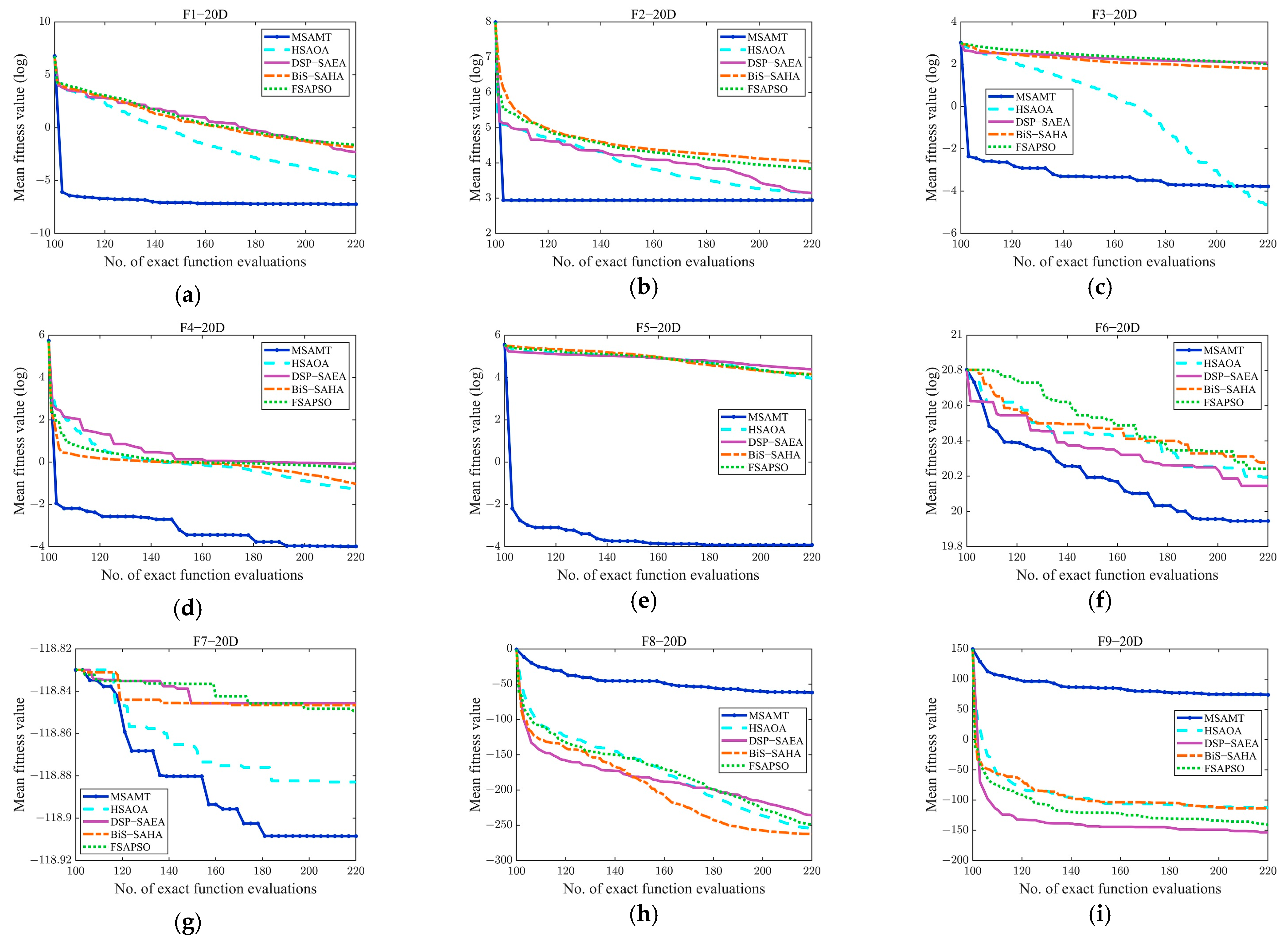
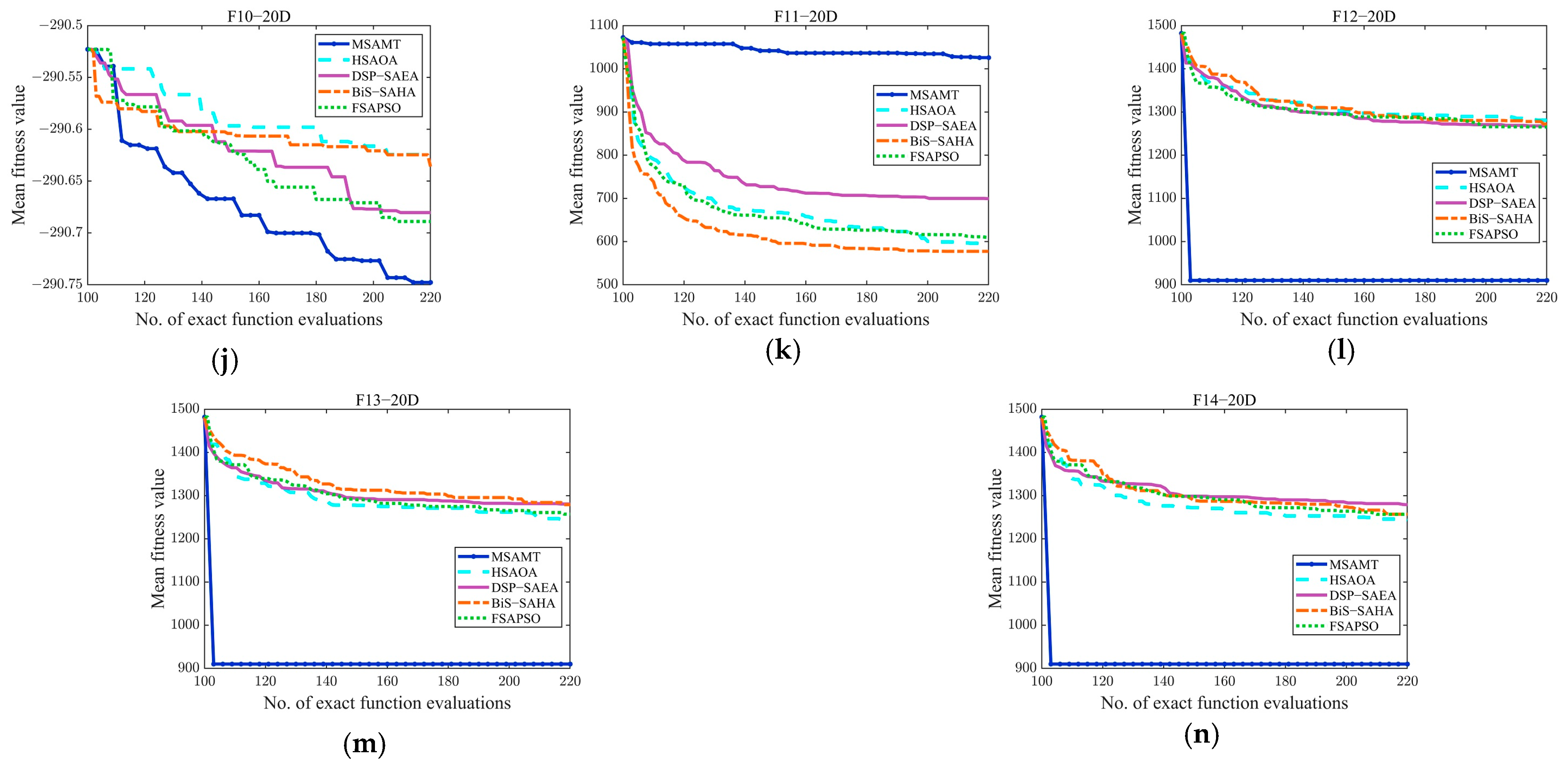
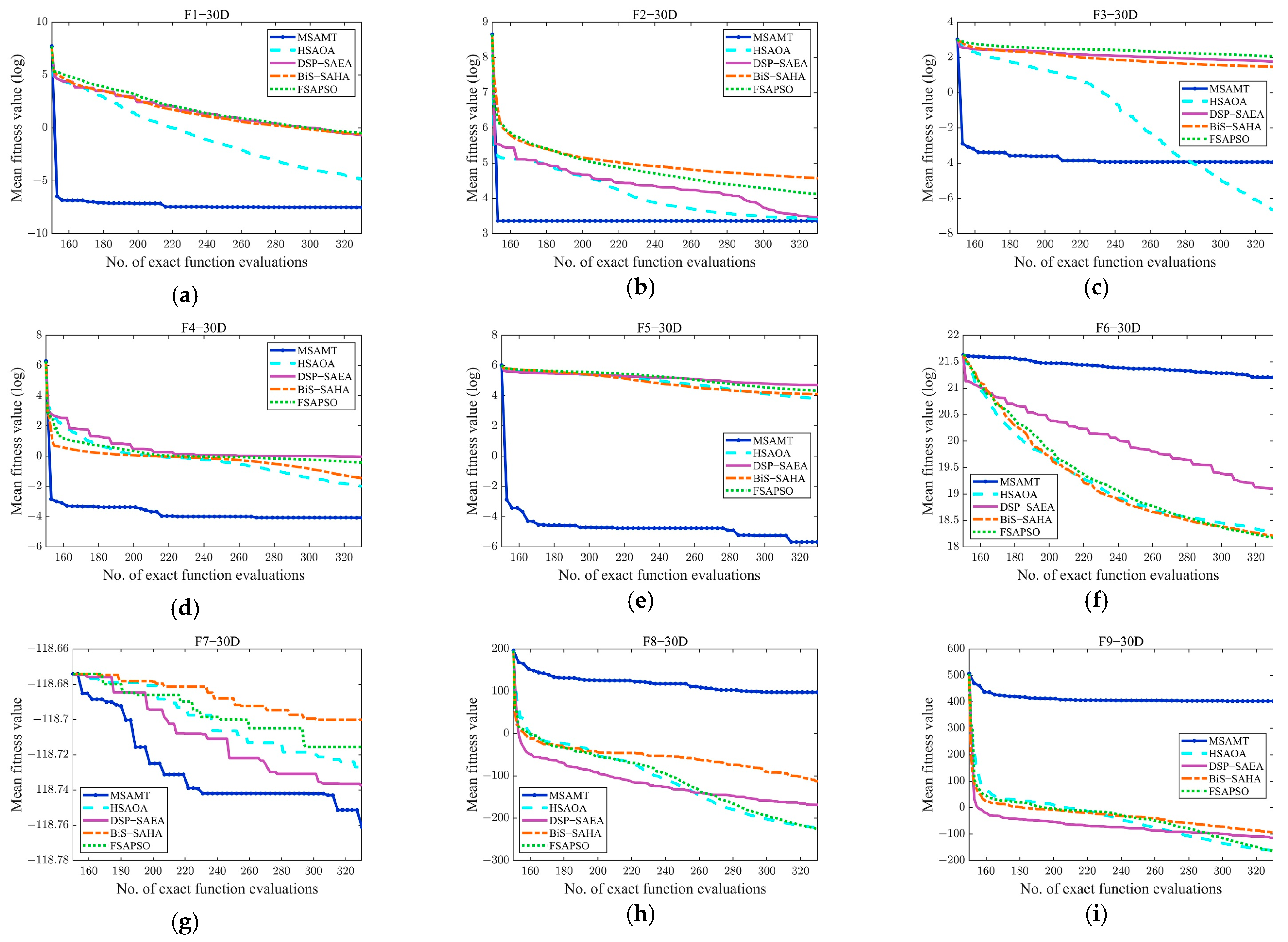
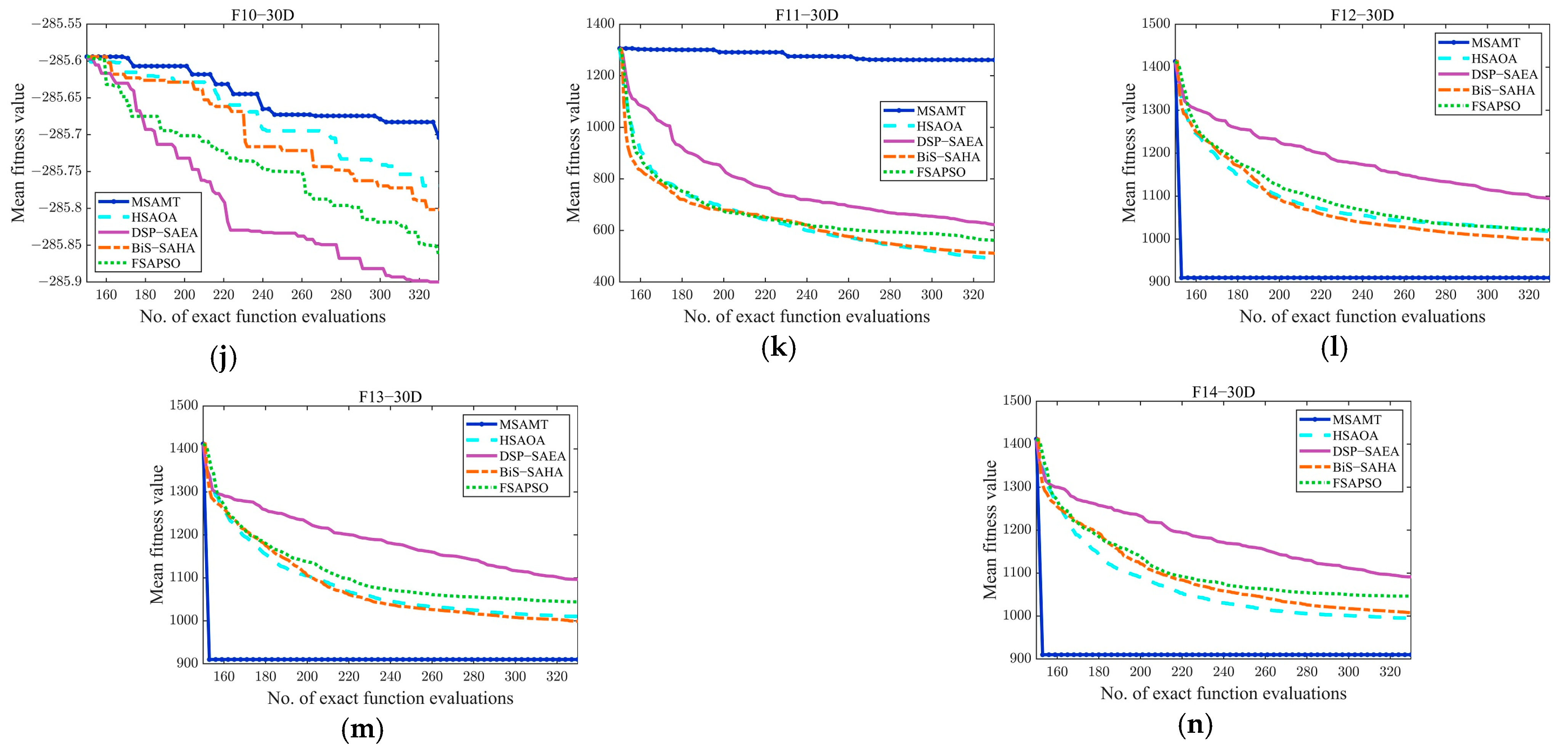
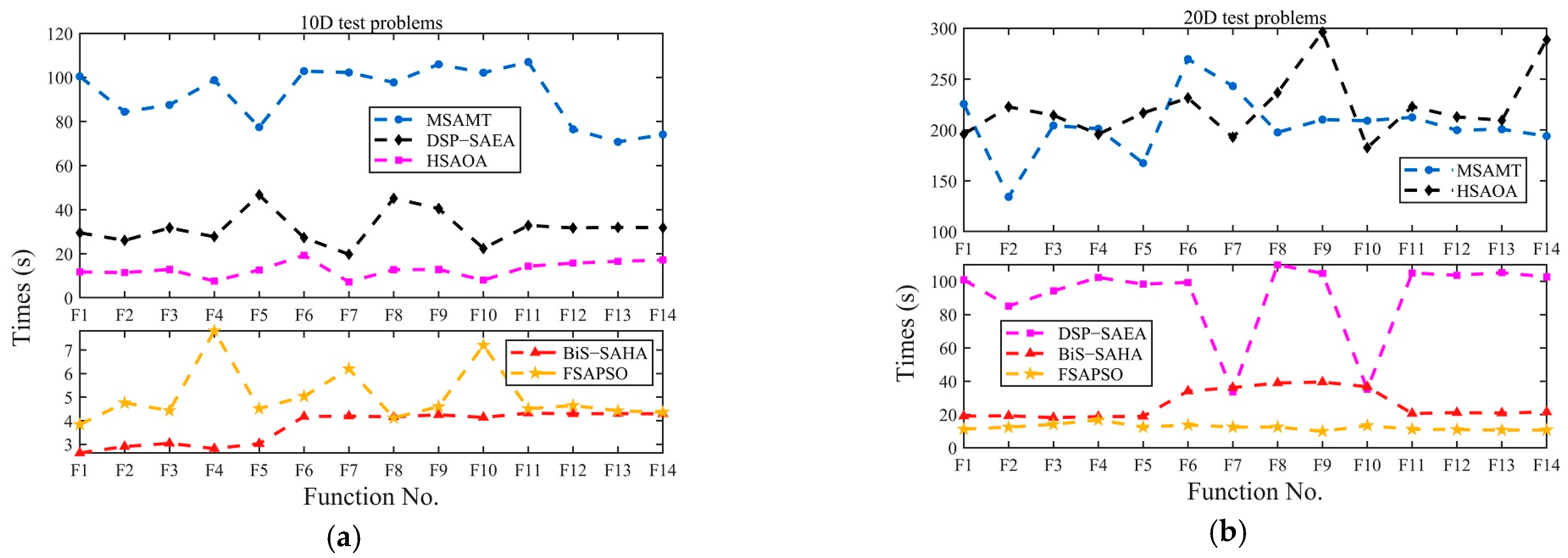
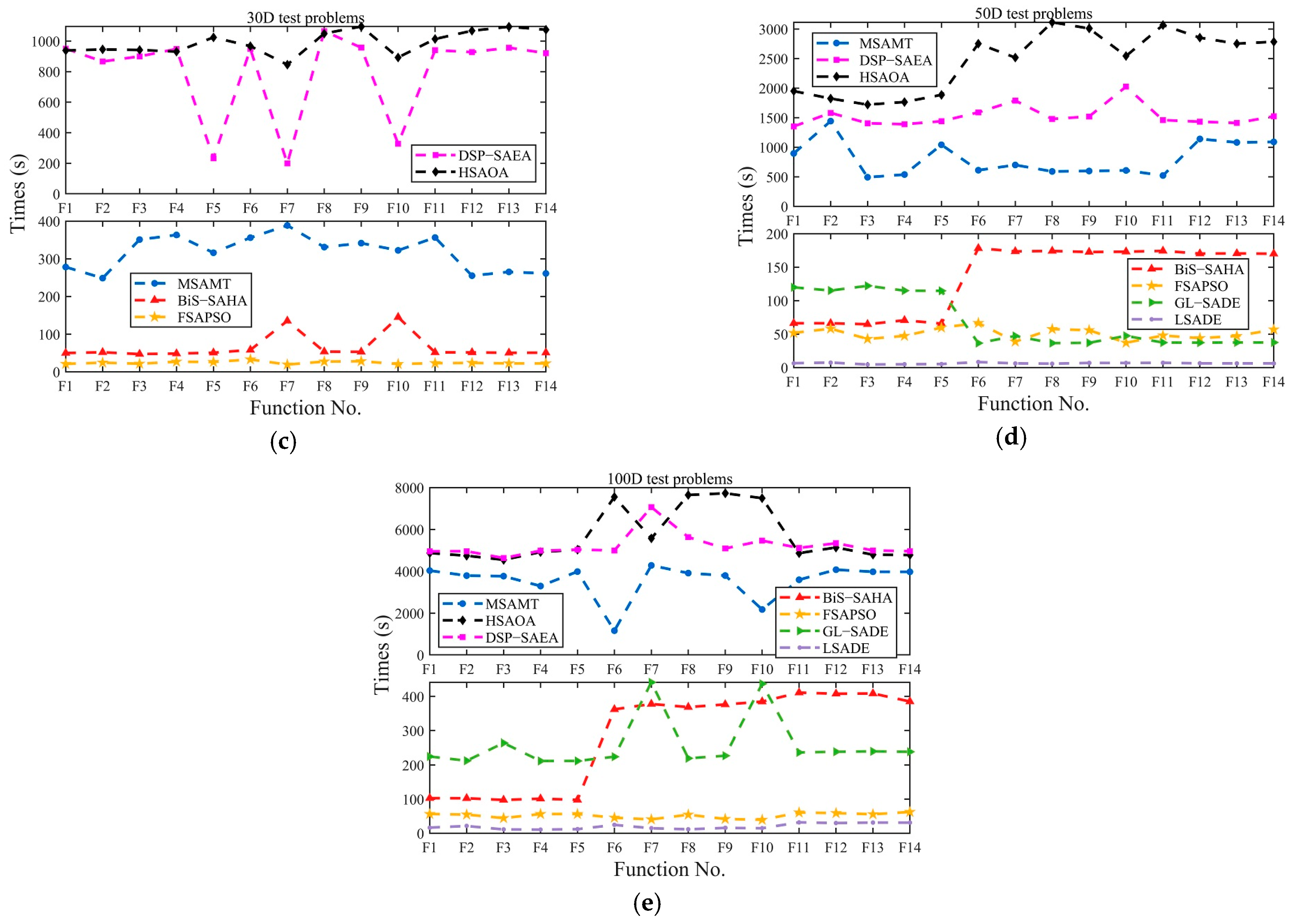
3.4.1. Experimental Results on 10D, 20D, and 30D Test Problems
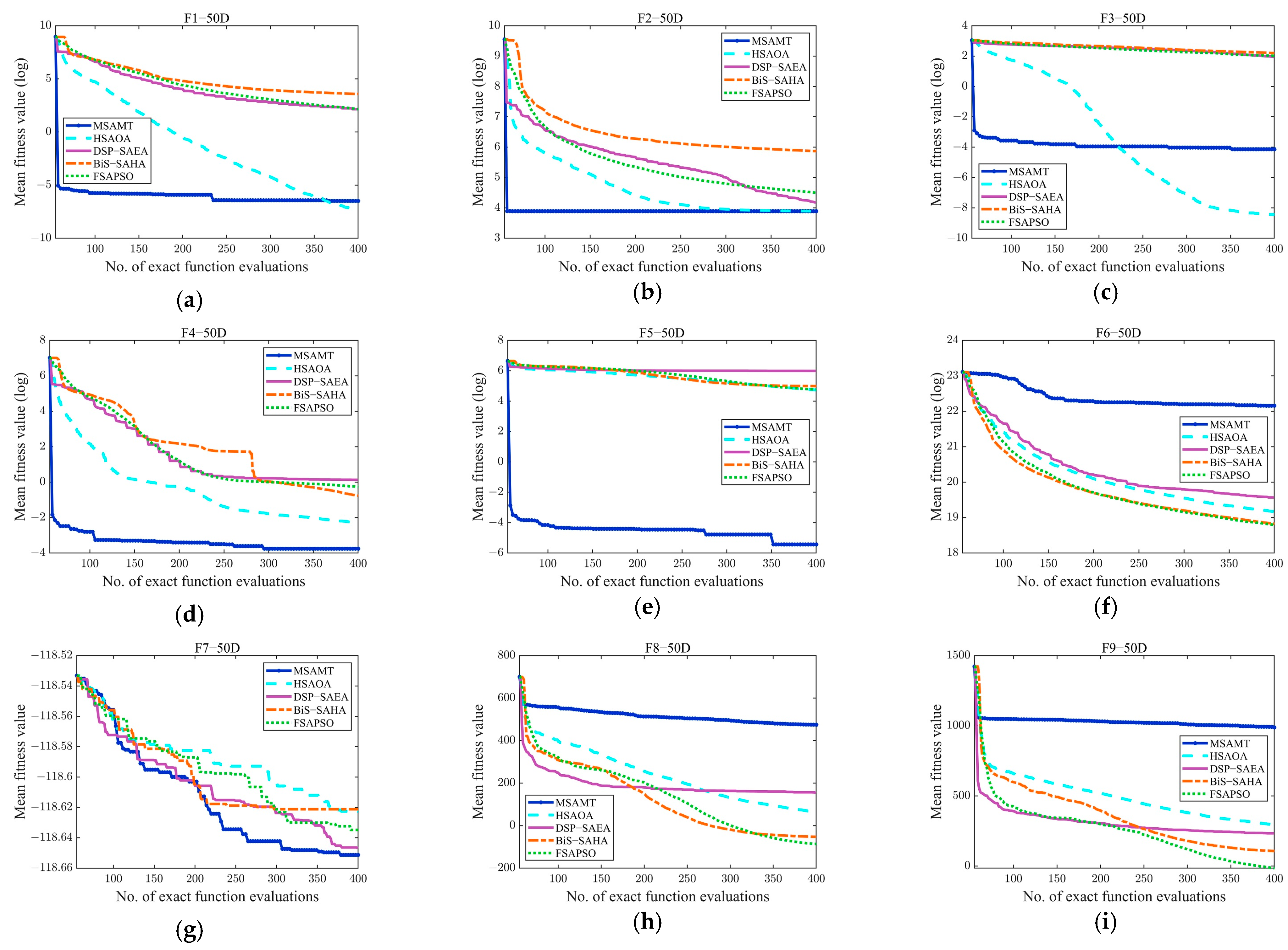
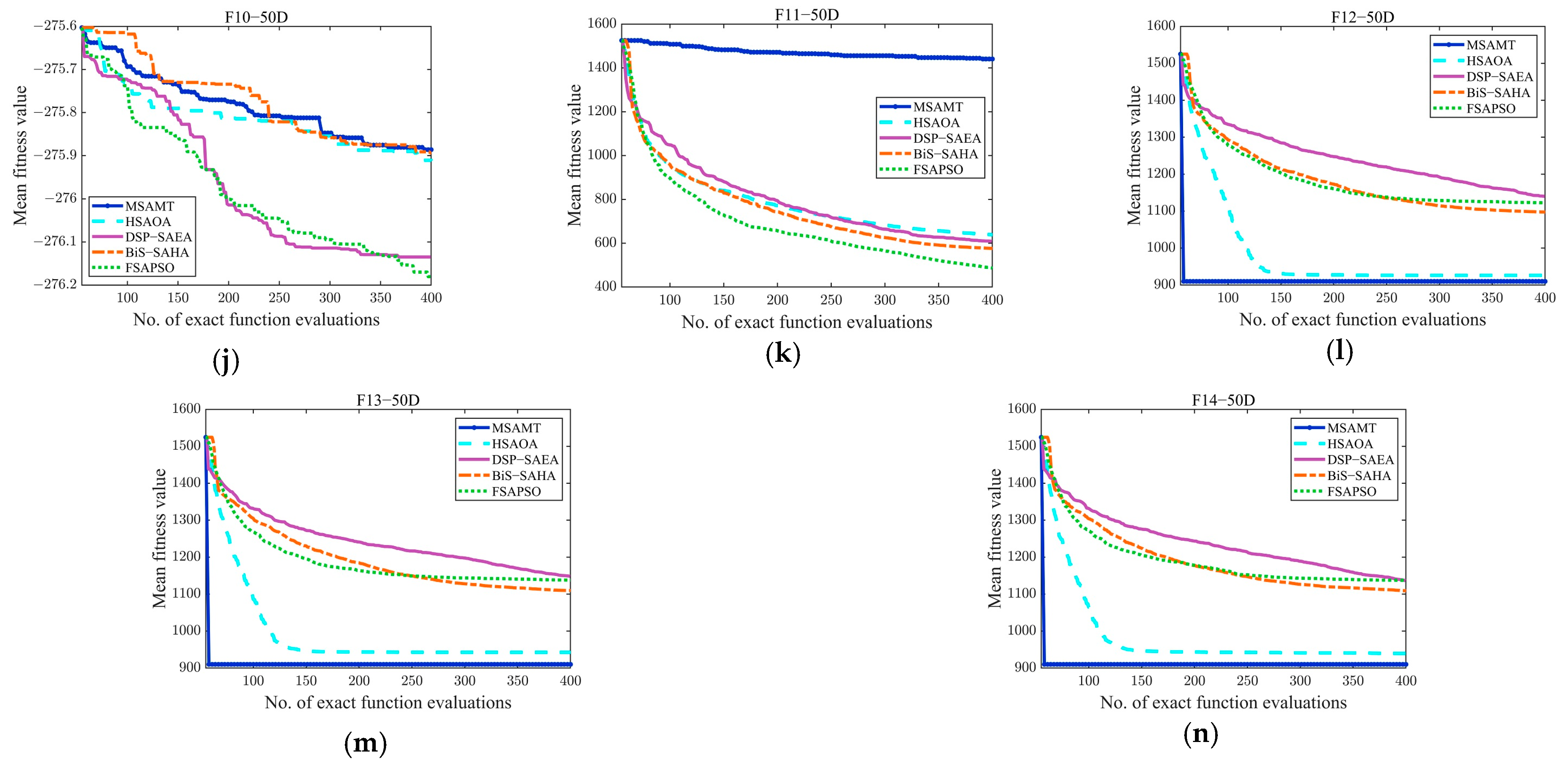
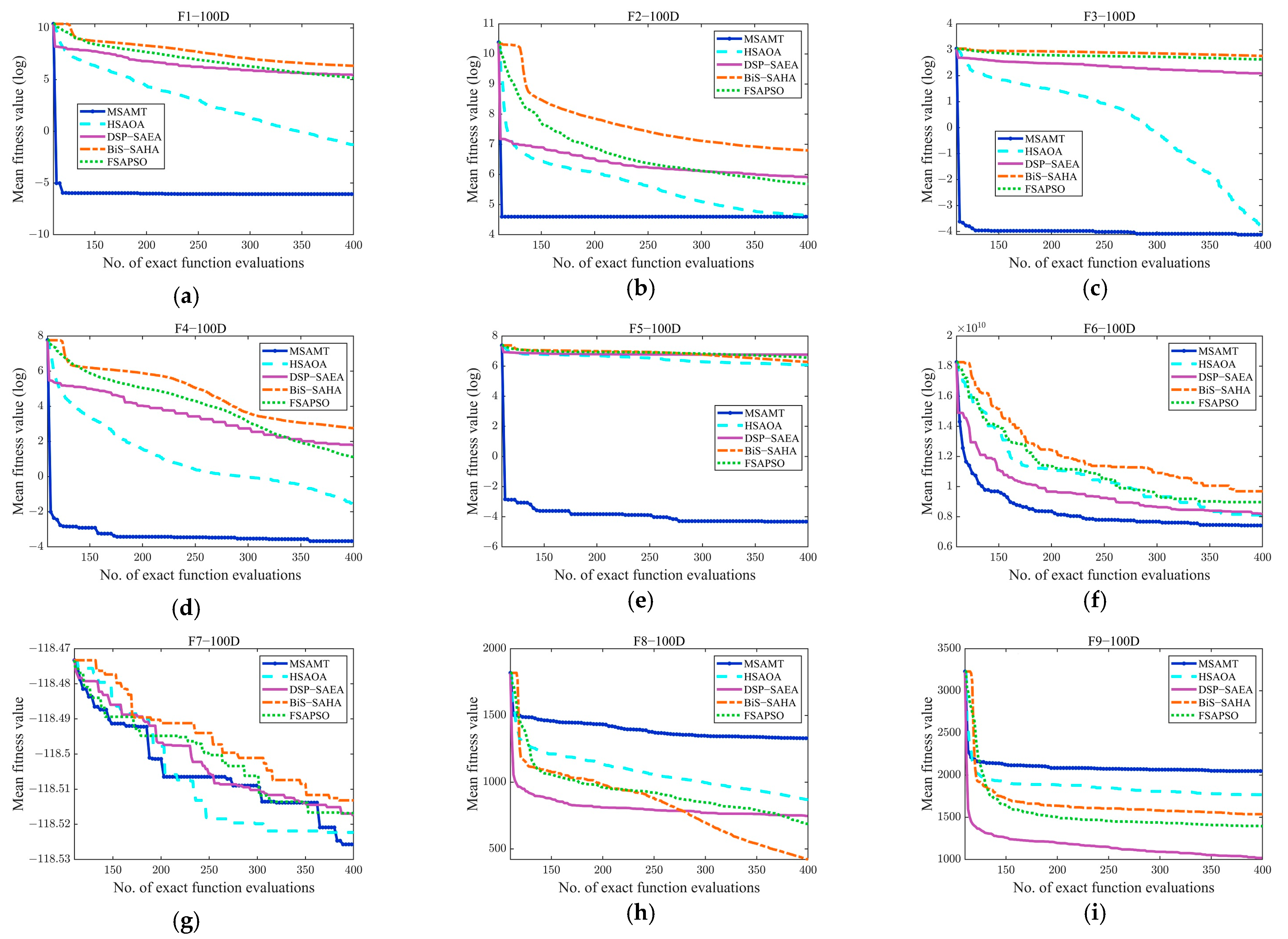
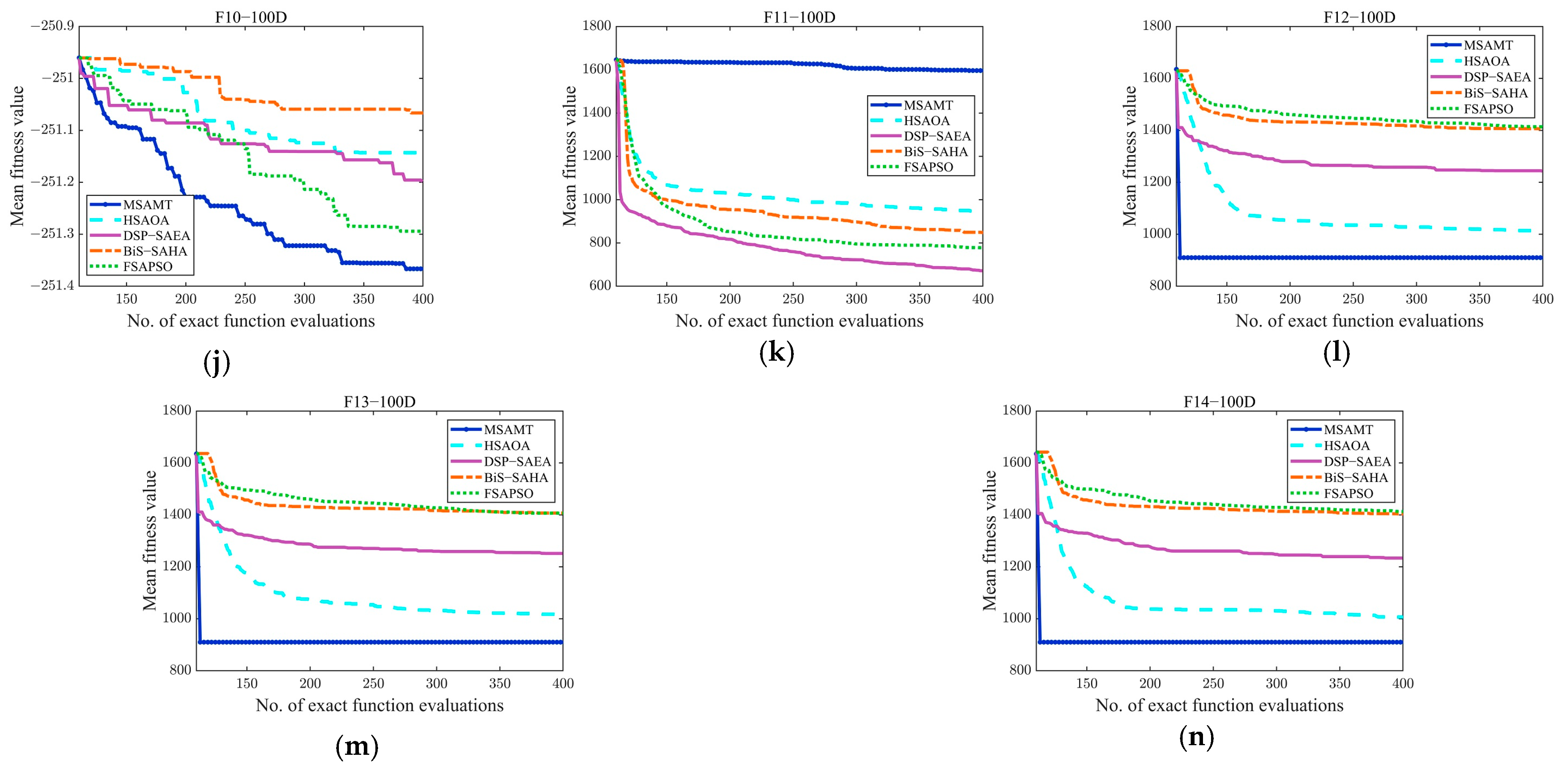
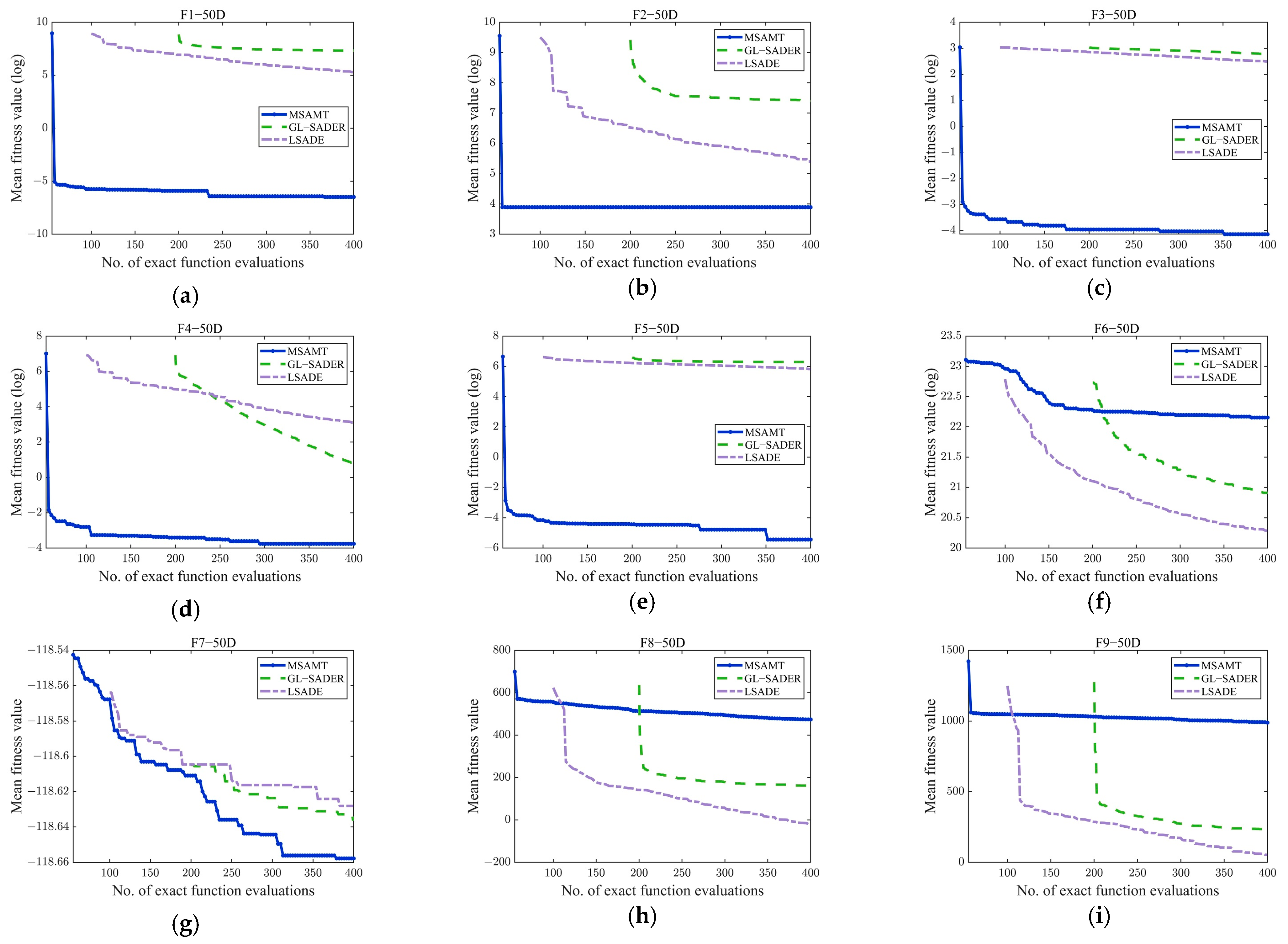
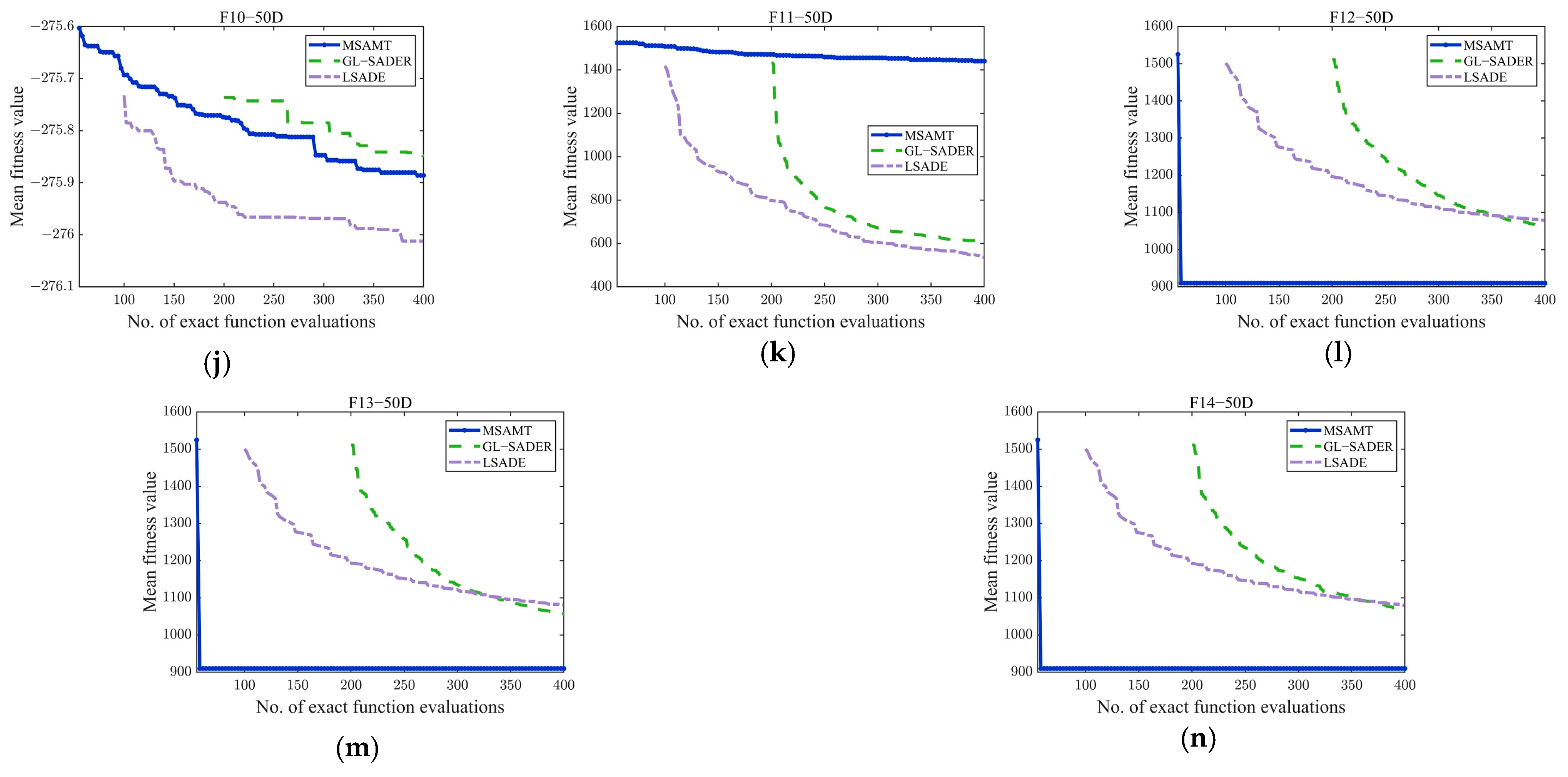
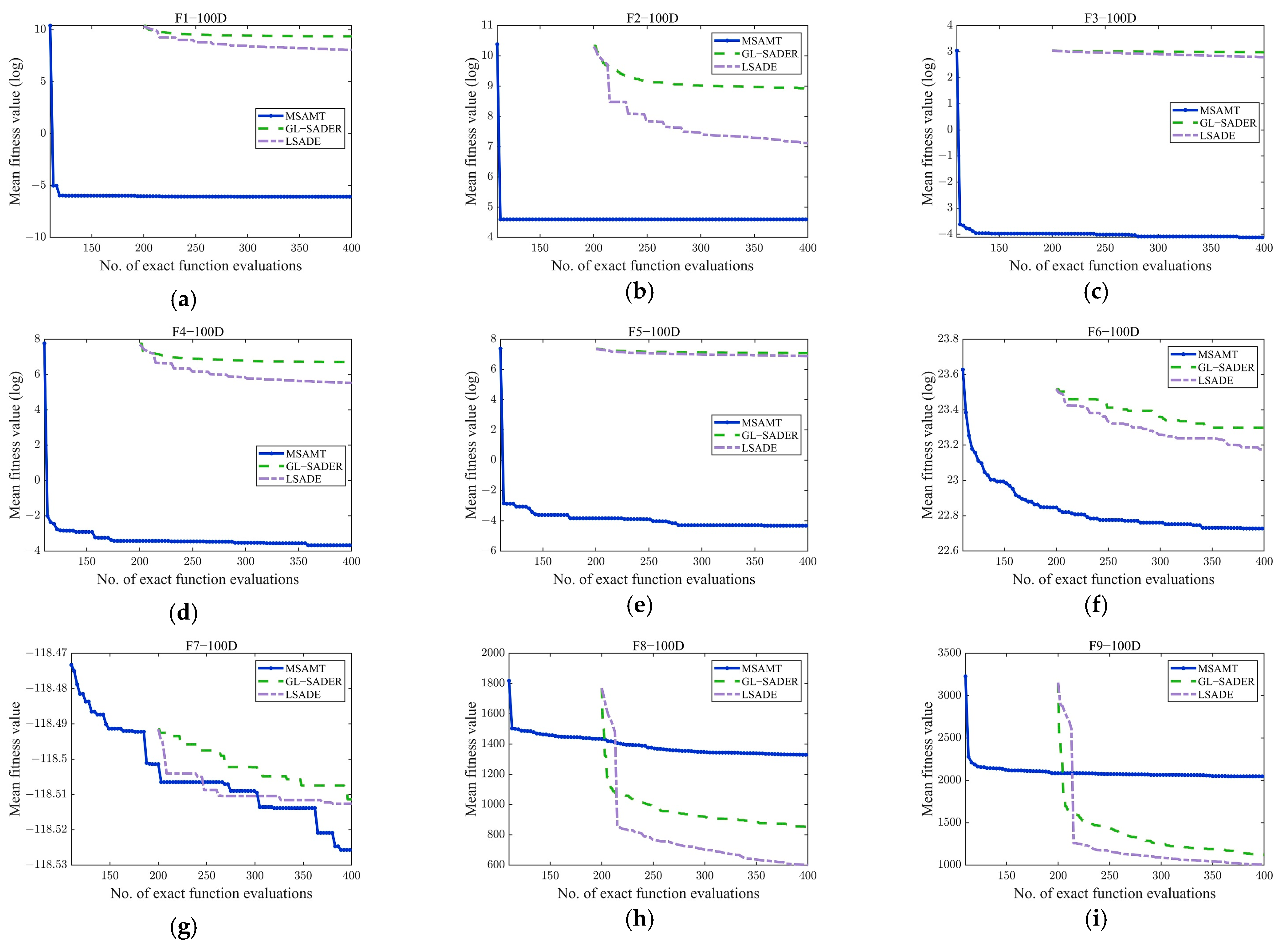
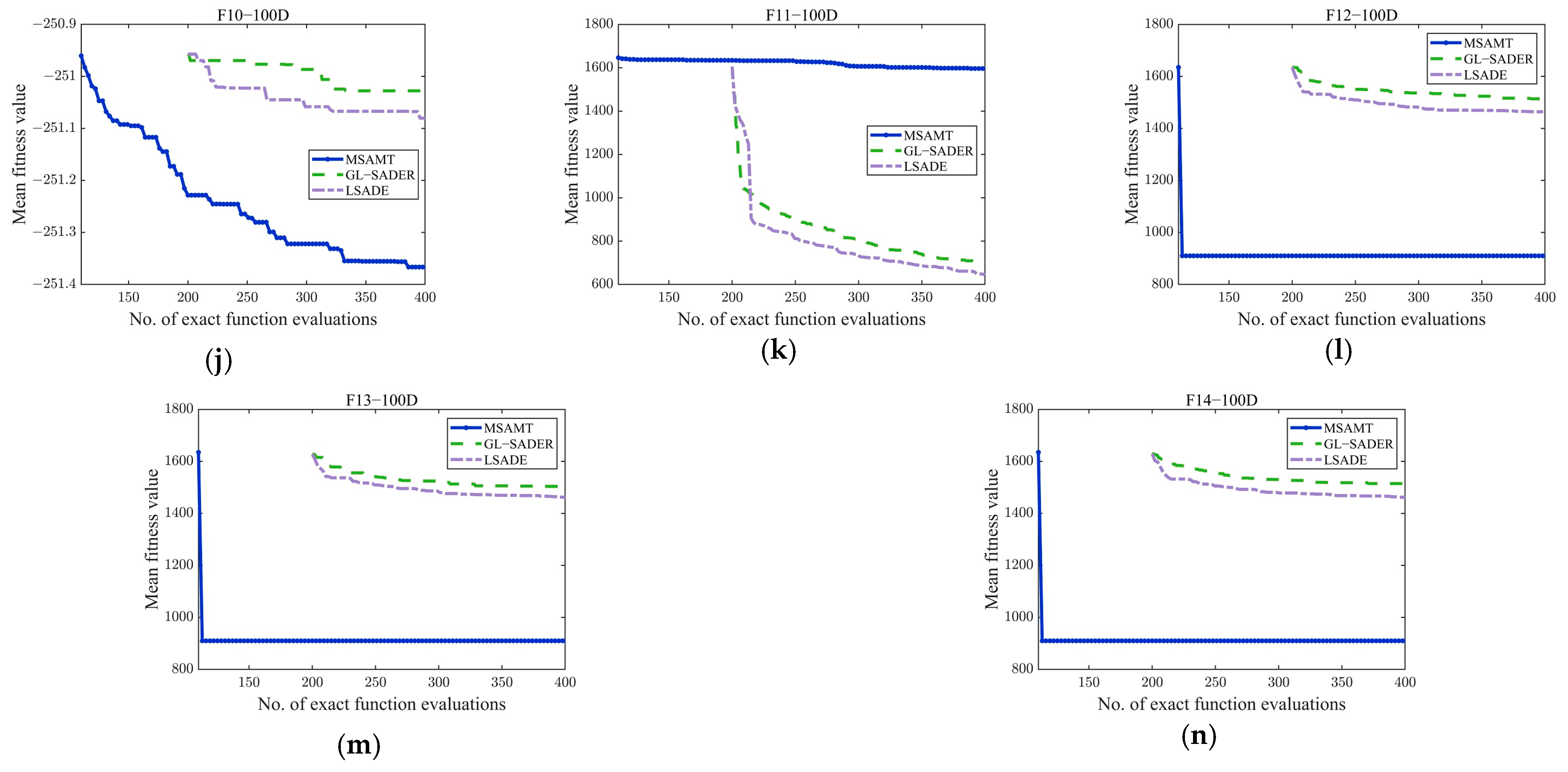
3.4.2. Experimental Results on 50D and 100D Test Problems
3.5. Computational Complexity Analysis of the MSAMT
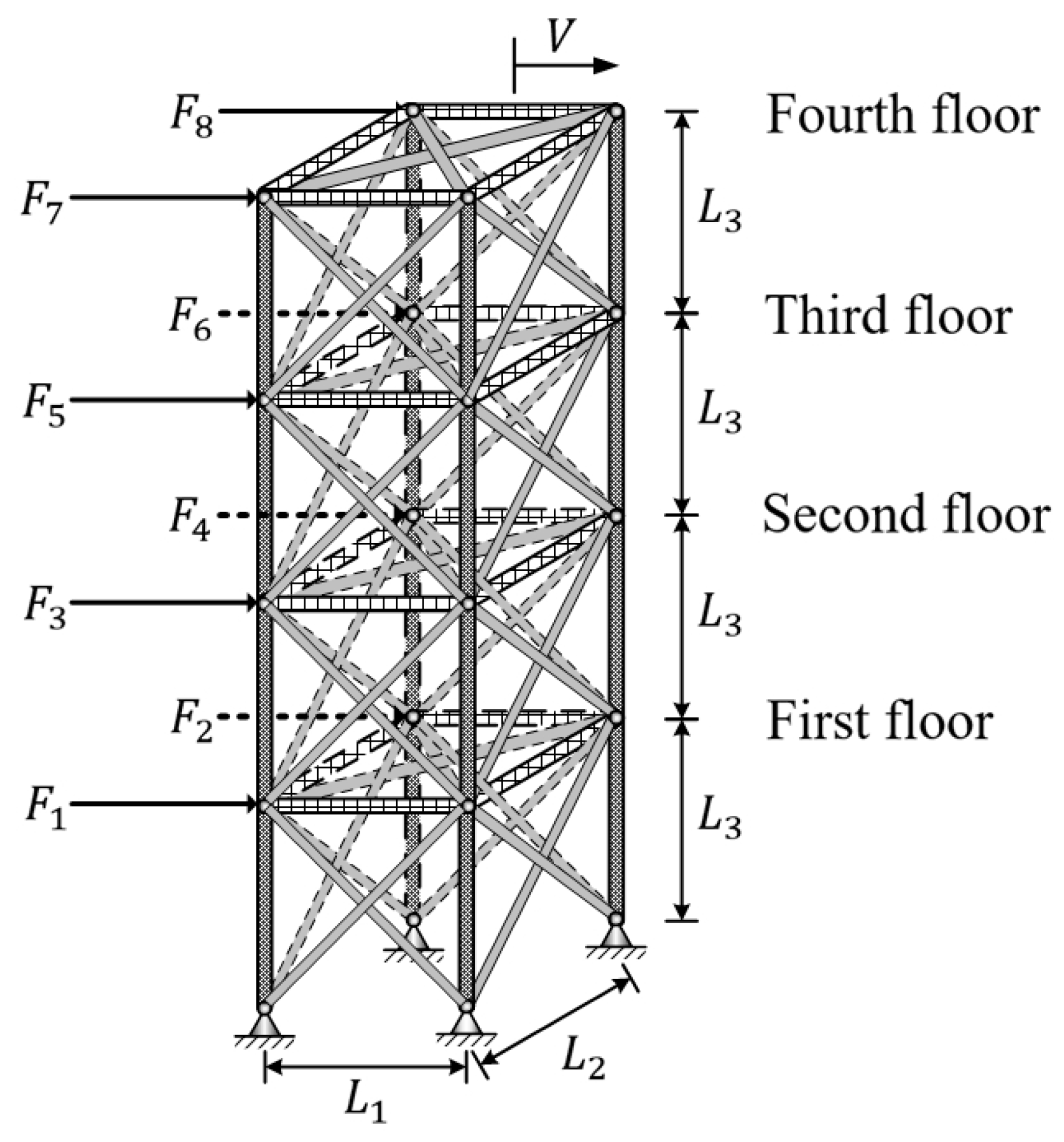
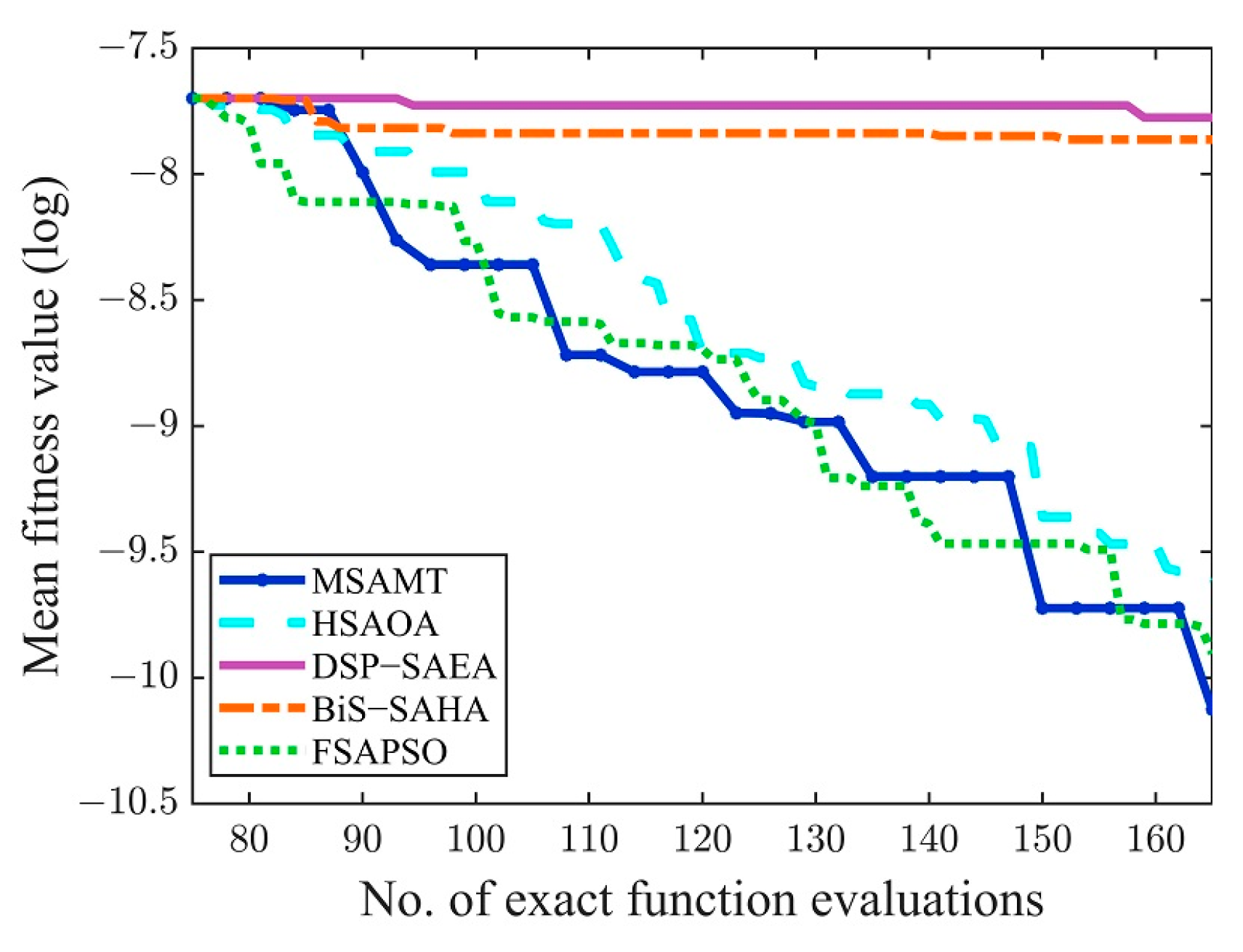
3.6. Case Study on a Spatial Truss Design Problem
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | D | n = 2 | n = 3 | n = 4 | n = 5 | n = 6 |
|---|---|---|---|---|---|---|
| F1 | 10 | 6.1576 × 10−04/9.0159 × 10−04 | 1.1315 × 10−03/2.1076 × 10−03 | 1.3484 × 10−03/1.6437 × 10−03 | 5.2604 × 10−03/1.4730 × 10−03 | 6.4951 × 10−03/1.2067 × 10−02 |
| 20 | 8.7857 × 10−04/1.2927 × 10−03 | 7.5156 × 10−04/1.0109 × 10−03 | 2.3772 × 10−03/3.4051 × 10−03 | 1.1820 × 10−03/1.7333 × 10−03 | 1.2078 × 10−03/1.8732 × 10−03 | |
| 30 | 5.0537 × 10−04/8.3404 × 10−04 | 7.4973 × 10−04/1.1724 × 10−03 | 2.7145 × 10−03/5.4419 × 10−03 | 1.2440 × 10−03/1.6409 × 10−03 | 1.7024 × 10−03/4.0160 × 10−03 | |
| F2 | 10 | 8.9377 × 100/1.9688 × 10−02 | 8.9276 × 100/2.4215 × 10−02 | 8.9145 × 100/1.8565 × 10−02 | 8.9132 × 100/1.4603 × 10−02 | 8.9213 × 100/1.1374 × 10−02 |
| 20 | 1.8948 × 101/4.3698 × 10−02 | 1.8972 × 101/3.0864 × 10−02 | 1.8968 × 101/2.9814 × 10−02 | 1.8982 × 101/2.2537 × 10−02 | 1.8957 × 101/3.4526 × 10−02 | |
| 30 | 2.8907 × 101/6.3428 × 10−02 | 2.8932 × 101/5.2952 × 10−02 | 2.8933 × 101/5.1432 × 10−02 | 2.8954 × 101/4.2116 × 10−02 | 2.8942 × 101/4.6175 × 10−02 | |
| F3 | 10 | 1.0046 × 10−1/9.8901 × 10−2 | 2.5499 × 10−1/2.4696 × 10−1 | 1.9278 × 10−1/1.8896 × 10−1 | 4.4993 × 10−1/4.7951 × 10−1 | 3.6344 × 10−1/4.7301 × 10−1 |
| 20 | 3.5661 × 10−2/3.4910 × 10−2 | 3.8880 × 10−2/4.9165 × 10−2 | 3.4230 × 10−2/2.5054 × 10−2 | 5.9253 × 10−2/6.3396 × 10−2 | 3.6311 × 10−2/4.0904 × 10−2 | |
| 30 | 2.0405 × 10−2/2.5210 × 10−2 | 2.8334 × 10−2/3.1228 × 10−2 | 2.4139 × 10−2/2.2255 × 10−2 | 2.6908 × 10−2/2.4515 × 10−2 | 4.1592 × 10−2/3.5518 × 10−2 | |
| F4 | 10 | 2.4538 × 10−1/2.5738 × 10−1 | 2.9535 × 10−1/3.3024 × 10−1 | 4.1281 × 10−1/3.4644 × 10−1 | 4.5236 × 10−1/3.5449 × 10−1 | 3.7287 × 10−1/3.7932 × 10−1 |
| 20 | 3.6554 × 10−2/4.8874 × 10−2 | 9.7207 × 10−2/2.0167 × 10−1 | 1.4333 × 10−1/1.9419 × 10−1 | 1.1596 × 10−1/1.9961 × 10−1 | 1.4841 × 10−1/1.5769 × 10−1 | |
| 30 | 2.2352 × 10−2/3.6281 × 10−2 | 3.9419 × 10−2/6.3087 × 10−2 | 5.1184 × 10−2/8.1190 × 10−2 | 9.0757 × 10−2/1.3953 × 10−1 | 6.1304 × 10−2/9.2959 × 10−2 | |
| F5 | 10 | 1.5706 × 10−2/1.7458 × 10−2 | 4.3639 × 10−2/1.2757 × 10−1 | 9.5155 × 10−2/2.8352 × 10−1 | 1.5851 × 10−1/4.0449 × 10−1 | 2.0106 × 10−1/3.0228 × 10−1 |
| 20 | 2.5543 × 10−2/4.0294 × 10−2 | 3.9266 × 10−2/6.3480 × 10−2 | 2.8908 × 10−2/4.8136 × 10−2 | 2.2724 × 10−2/6.1190 × 10−2 | 2.8357 × 10−2/3.9895 × 10−2 | |
| 30 | 7.7361 × 10−3/2.0119 × 10−2 | 1.8737 × 10−2/3.8945 × 10−2 | 1.1835 × 10−2/1.4120 × 10−2 | 2.3746 × 10−2/4.0766 × 10−2 | 1.7943 × 10−2/2.4801 × 10−2 | |
| F6 | 10 | 3.9109 × 108/2.4226 × 108 | 3.2550 × 108/1.9101 × 108 | 3.4137 × 108/1.6906 × 108 | 3.4896 × 108/1.7638 × 108 | 3.3892 × 108/1.7821 × 108 |
| 20 | 4.4850 × 108/1.6046 × 108 | 4.4514 × 108/2.0654 × 108 | 4.3962 × 108/1.3582 × 108 | 4.9135 × 108/1.6797 × 108 | 5.3339 × 108/1.9813 × 108 | |
| 30 | 1.6204 × 109/3.4767 × 108 | 1.7716 × 109/4.8095 × 108 | 1.8055 × 109/4.1151 × 108 | 1.8337 × 109/4.2732 × 108 | 1.9834 × 109/5.5657 × 108 | |
| F7 | 10 | −1.1906 × 102/8.2173 × 10−2 | −1.1906 × 102/1.3282 × 10−1 | −1.1906 × 102/1.2635 × 10−1 | −1.1912 × 102/6.3425 × 101 | −1.1902 × 102/1.1162 × 10−1 |
| 20 | −1.1883 × 102/9.7998 × 10−2 | −1.1885 × 102/8.0033 × 10−2 | −1.1883 × 102/8.4834 × 10−2 | −1.1885 × 102/8.4656 × 10−2 | −1.1883 × 102/9.7280 × 10−2 | |
| 30 | −1.1872 × 102/7.4332 × 10−2 | −1.1870 × 102/5.8735 × 10−2 | −1.1871 × 102/5.5026 × 10−2 | −1.1873 × 102/4.8874 × 10−2 | −1.1872 × 102/5.1845 × 10−2 | |
| F8 | 10 | −2.1209 × 102/1.6889 × 101 | −2.1083 × 102/1.8400 × 101 | −2.0987 × 102/1.7706 × 101 | −2.0507 × 102/1.6862 × 101 | −2.0916 × 102/2.1757 × 101 |
| 20 | −6.6481 × 101/2.9068 × 101 | −6.8770 × 101/2.8479 × 101 | −5.3536 × 101/2.5079 × 101 | −5.6753 × 101/2.2102 × 101 | −7.4236 × 101/2.9150 × 101 | |
| 30 | 7.6683 × 101/4.5207 × 101 | 9.2089 × 101/3.5833 × 101 | 7.5062 × 101/3.7829 × 101 | 7.8364 × 101/3.5119 × 101 | 6.6761 × 101/4.4122 × 101 | |
| F9 | 10 | −1.8777 × 102/1.5327 × 101 | −1.7113 × 102/2.4084 × 101 | −1.7066 × 102/2.7885 × 101 | −1.7145 × 102/2.1716 × 101 | −1.7240 × 102/2.4936 × 101 |
| 20 | 6.4664 × 101/3.7553 × 101 | 6.7919 × 101/4.3892 × 101 | 6.6263 × 101/4.1520 × 101 | 5.5372 × 101/3.2486 × 101 | 4.8552 × 101/5.0830 × 101 | |
| 30 | 3.8454 × 102/5.8307 × 101 | 4.1287 × 102/5.2558 × 101 | 3.7172 × 102/9.9035 × 101 | 3.8358 × 102/1.0230 × 102 | 3.3660 × 102/9.2954 × 101 | |
| F10 | 10 | −2.9541 × 102/1.3311 × 10−1 | −2.9542 × 102/1.3419 × 10−1 | −2.9544 × 102/1.7197 × 10−1 | −2.9543 × 102/1.4707 × 10−1 | −2.9545 × 102/1.3905 × 10−1 |
| 20 | −2.9078 × 102/2.0940 × 10−1 | −2.9076 × 102/1.3735 × 10−1 | −2.9077 × 102/2.3274 × 10−1 | −2.9073 × 102/1.7840 × 10−1 | −2.9080 × 102/2.1605 × 10−1 | |
| 30 | −2.8567 × 102/1.9433 × 10−1 | −2.8567 × 102/2.0172 × 10−1 | −2.8570 × 102/1.8898 × 10−1 | −2.8567 × 102/2.2014 × 10−1 | −2.8570 × 102/2.0380 × 10−1 | |
| F11 | 10 | 7.6382 × 102/1.3531 × 102 | 7.9326 × 102/1.4033 × 102 | 7.8300 × 102/1.3476 × 102 | 7.4459 × 102/1.4442 × 102 | 7.4430 × 102/1.2479 × 102 |
| 20 | 1.0332 × 103/1.4849 × 102 | 1.0469 × 103/1.5155 × 102 | 1.0438 × 103/1.6408 × 102 | 1.0268 × 103/1.7361 × 102 | 1.0437 × 103/1.5754 × 102 | |
| 30 | 1.2662 × 103/1.0251 × 102 | 1.2770 × 103/1.1732 × 102 | 1.2701 × 103/1.1117 × 102 | 1.2567 × 103/1.2224 × 102 | 1.2538 × 103/1.3072 × 102 | |
| F12 | 10 | 9.1010 × 102/1.5644 × 10−1 | 9.1007 × 102/1.2011 × 10−1 | 9.1026 × 102/3.9976 × 10−1 | 9.1038 × 102/4.5278 × 10−1 | 9.1037 × 102/7.8635 × 10−1 |
| 20 | 9.1001 × 102/9.9019 × 10−3 | 9.1002 × 102/2.6173 × 10−2 | 9.1002 × 102/2.4352 × 10−2 | 9.1001 × 102/2.0584 × 10−2 | 9.1005 × 102/1.1789 × 10−1 | |
| 30 | 9.1000 × 102/6.0359 × 10−3 | 9.1001 × 102/9.8419 × 10−3 | 9.1001 × 102/1.0193 × 10−2 | 9.1001 × 102/6.8736 × 10−3 | 9.1001 × 102/1.2882 × 10−2 | |
| F13 | 10 | 9.1014 × 102/2.2779 × 10−1 | 9.1008 × 102/8.9839 × 10−2 | 9.1020 × 102/3.9035 × 10−1 | 9.1015 × 102/1.8995 × 10−1 | 9.1048 × 102/1.0171 × 100 |
| 20 | 9.1001 × 102/1.0621 × 10−2 | 9.1002 × 102/1.9057 × 10−2 | 9.1002 × 102/5.5961 × 10−2 | 9.1003 × 102/6.8497 × 10−2 | 9.1001 × 102/1.6544 × 10−2 | |
| 30 | 9.1001 × 102/1.0603 × 10−2 | 9.1001 × 102/4.4586 × 10−3 | 9.1001 × 102/6.7372 × 10−3 | 9.1001 × 102/7.0401 × 10−3 | 9.1001 × 102/5.5567 × 10−3 | |
| F14 | 10 | 9.1005 × 102/6.6851 × 10−2 | 9.1008 × 102/9.6278 × 10−2 | 9.1037 × 102/6.8048 × 10−1 | 9.1042 × 102/6.8477 × 10−1 | 9.1078 × 102/1.7724 × 100 |
| 20 | 9.1001 × 102/1.2135 × 10−2 | 9.1002 × 102/1.2772 × 10−2 | 9.1001 × 102/8.6495 × 10−3 | 9.1003 × 102/3.5058 × 10−2 | 9.1001 × 102/2.4665 × 10−2 | |
| 30 | 9.1001 × 102/6.3484 × 10−3 | 9.1001 × 102/1.4759 × 10−2 | 9.1001 × 102/1.0503 × 10−2 | 9.1001 × 102/1.5119 × 10−2 | 9.1001 × 102/6.8025 × 10−3 |
| No. | MSAMT | MSAMT-KRG | MSAMT-Fixed | |||
|---|---|---|---|---|---|---|
| Mean/Std | Time (s) | Mean/Std | Time (s) | Mean/Std | Time (s) | |
| F1 | 7.1867 × 10−4/1.2786 × 10−3 | 2.2559 × 102 | 8.5112 × 10−4/1.6087 × 10−3 | 1.4392 × 103 | 5.6628 × 10−5/1.2308 × 10−4 | 1.8153 × 103 |
| F2 | 1.8918 × 101/3.0714 × 10−2 | 1.3417 × 102 | 1.8957 × 101/3.2927 × 10−2 | 1.3663 × 103 | 1.8932 × 101/4.3047 × 10−2 | 1.8511 × 103 |
| F3 | 2.2813 × 10−2/1.8972 × 10−2 | 2.0433 × 102 | 3.1443 × 10−2/3.0788 × 10−2 | 1.4397 × 103 | 1.8529 × 10−2/1.9483 × 10−2 | 1.7036 × 103 |
| F4 | 1.8587 × 10−2/2.6338 × 10−2 | 2.0119 × 102 | 4.6343 × 10−2/6.6799 × 10−2 | 1.4155 × 103 | 2.1738 × 10−2/2.5219 × 10−2 | 1.8022 × 103 |
| F5 | 1.9954 × 10−2/3.7313 × 10−2 | 1.6742 × 102 | 6.4855 × 10−3/1.2761 × 10−2 | 1.4257 × 103 | 5.7906 × 10−4/9.8625 × 10−4 | 1.9176 × 103 |
| F6 | 4.5970 × 108/1.7431 × 108 | 2.0610 × 102 | 4.4432 × 108/1.8899 × 108 | 1.0199 × 103 | 4.7695 × 108/2.0986 × 108 | 1.4189 × 103 |
| F7 | −1.1891 × 102/8.6824 × 10−2 | 2.0682 × 102 | −1.1883 × 102/9.6093 × 10−2 | 1.0735 × 103 | −1.1884 × 102/7.2111 × 10−2 | 1.3799 × 103 |
| F8 | −6.1893 × 101/3.3596 × 101 | 1.9759 × 102 | −5.6754 × 101/2.7057 × 101 | 1.4987 × 103 | −4.6272 × 101/3.2021 × 101 | 1.9541 × 103 |
| F9 | 7.3996 × 101/3.6260 × 101 | 2.1021 × 102 | 5.0348 × 101/4.5175 × 101 | 9.3336 × 102 | 6.6196 × 101/3.5719 × 101 | 1.3000 × 103 |
| F10 | −2.9075 × 102/1.7213 × 10−1 | 2.0911 × 102 | −2.9078 × 102/1.5655 × 10−1 | 1.0734 × 103 | −2.9081 × 102/1.8345 × 10−1 | 1.3873 × 103 |
| F11 | 1.0258 × 103/1.7481 × 102 | 2.1239 × 102 | 1.0309 × 103/1.7726 × 102 | 1.1297 × 103 | 1.0365 × 103/1.8045 × 102 | 1.6549 × 103 |
| F12 | 9.1001 × 102/9.8825 × 10−3 | 1.9979 × 102 | 9.1001 × 102/1.2676 × 10−2 | 1.4347 × 103 | 9.1001 × 102/6.2157 × 10−3 | 1.8808 × 103 |
| F13 | 9.1001 × 102/1.6433 × 10−2 | 2.0068 × 102 | 9.1001 × 102/1.6238 × 10−2 | 1.3507 × 103 | 9.1001 × 102/3.7595 × 10−3 | 1.8873 × 103 |
| F14 | 9.1001 × 102/7.5166 × 10−3 | 1.9395 × 102 | 9.1001 × 102/1.5057 × 10−2 | 1.4379 × 103 | 9.1001 × 102/4.5504 × 10−3 | 1.7661 × 103 |
| No. | D | MSAMT | HSAOA | DSP-SAEA | BiS-SAHA | FSAPSO |
|---|---|---|---|---|---|---|
| F1 | 10 | 2.2186 × 10−3/7.3964 × 10−3 | 2.4575 × 10−3/2.4031 × 10−3(+) | 3.3321 × 10−7/6.0800 × 10−7(−) | 3.1726 × 10−2/3.9344 × 10−2(+) | 2.7795 × 10−2/3.0173 × 10−2(+) |
| 20 | 7.1867 × 10−4/1.2786 × 10−3 | 9.5862 × 10−3/2.1410 × 10−2(+) | 9.8464 × 10−2/1.4483 × 10−1(+) | 1.5405 × 10−1/1.1005 × 10−1(+) | 1.9539 × 10−1/1.3521 × 10−1(+) | |
| 30 | 5.4775 × 10−4/8.8610 × 10−4 | 8.1057 × 10−3/1.8270 × 10−2(+) | 4.9800 × 10−1/2.7486 × 10−1(+) | 5.3745 × 10−1/2.1538 × 10−1(+) | 6.1116 × 10−1/3.2927 × 10−1(+) | |
| F2 | 10 | 8.9291 × 100/1.6436 × 10−2 | 9.7479 × 100/1.4695 × 100(+) | 1.0654 × 101/1.5344 × 100(+) | 1.6730 × 101/5.7852 × 100(+) | 1.4193 × 101/7.3871 × 100(+) |
| 20 | 1.8918 × 101/3.0714 × 10−2 | 2.3221 × 101/4.1746 × 100(+) | 2.3291 × 101/2.9022 × 100(+) | 5.6260 × 101/2.1739 × 101(+) | 4.6111 × 101/2.6400 × 101(+) | |
| 30 | 2.8913 × 101/6.1577 × 10−2 | 3.0580 × 101/1.6938 × 100(+) | 3.2337 × 101/1.2599 × 100(+) | 9.6668 × 101/2.8762 × 101(+) | 6.1852 × 101/1.9570 × 101(+) | |
| F3 | 10 | 7.9531 × 10−2/9.6623 × 10−2 | 6.9486 × 10−1/8.2074 × 10−1(+) | 7.0093 × 100/2.4921 × 100(+) | 5.6567 × 100/2.8986 × 100(+) | 5.7167 × 100/2.4296 × 100(+) |
| 20 | 2.2813 × 10−2/1.8972 × 10−2 | 9.6387 × 10−3/9.7639 × 10−3(−) | 7.8720 × 100/1.8258 × 100(+) | 5.9863 × 100/4.0404 × 100(+) | 7.5047 × 100/2.7653 × 100(+) | |
| 30 | 1.9428 × 10−2/2.3069 × 10−2 | 1.2704 × 10−3/5.7678 × 10−4(−) | 5.8237 × 100/1.2778 × 100(+) | 4.3556 × 100/1.6599 × 100(+) | 7.8665 × 100/2.3169 × 100(+) | |
| F4 | 10 | 1.2388 × 10−1/1.7845 × 10−1 | 6.8511 × 10−1/2.8208 × 10−1(+) | 1.0043 × 100/7.5751 × 100(+) | 7.1742 × 10−1/2.9906 × 10−1(+) | 9.4176 × 10−1/6.4448 × 10−2(+) |
| 20 | 1.8587 × 10−2/2.6338 × 10−2 | 2.7908 × 10−1/3.4399 × 10−1(+) | 9.1369 × 10−1/9.7421 × 10−2(+) | 3.5613 × 10−1/1.9511 × 10−1(+) | 7.4943 × 10−1/1.2541 × 10−1(+) | |
| 30 | 1.7011 × 10−2/3.2582 × 10−2 | 1.3709 × 10−1/1.9915 × 10−1(+) | 9.6615 × 10−1/5.4062 × 10−2(+) | 2.3262 × 10−1/1.4185 × 10−1(+) | 6.5227 × 10−1/1.0699 × 10−1(+) | |
| F5 | 10 | 5.1065 × 10−2/9.6333 × 10−2 | 4.7218 × 101/2.8014 × 101(+) | 3.9081 × 101/1.4233 × 101(+) | 3.6467 × 101/2.1593 × 101(+) | 4.0986 × 101/1.6733 × 101(+) |
| 20 | 1.9954 × 10−2/3.7313 × 10−2 | 5.2701 × 101/2.5755 × 101(+) | 8.0158 × 101/2.6458 × 101(+) | 6.3888 × 101/3.0763 × 101(+) | 6.1867 × 101/3.2755 × 101(+) | |
| 30 | 3.4102 × 10−3/5.3363 × 10−3 | 4.6209 × 101/2.4258 × 101(+) | 2.1261 × 101/1.2658 × 101(+) | 6.1469 × 101/2.9189 × 101(+) | 7.6937 × 101/3.5378 × 101(+) | |
| F6 | 10 | 3.3595 × 108/1.6961 × 108 | 3.8227 × 107/4.1371 × 107(−) | 7.9564 × 107/6.1272 × 107(−) | 2.3740 × 107/3.0509 × 107(−) | 3.1398 × 107/3.0647 × 107(−) |
| 20 | 4.5970 × 108/1.7431 × 108 | 5.8898 × 108/2.0217 × 108(+) | 5.6116 × 108/2.8450 × 108(+) | 5.7606 × 108/2.2375 × 108(+) | 6.1811 × 108/2.9055 × 108(+) | |
| 30 | 1.6180 × 109/3.5130 × 108 | 8.6408 × 107/4.6362 × 107(−) | 1.9755 × 108/7.0611 × 107(−) | 8.1104 × 107/4.5028 × 107(−) | 7.7800 × 107/3.3843 × 107(−) | |
| F7 | 10 | −1.1908 × 102/1.3742 × 10−1 | −1.1884 × 102/1.0851 × 10−1(+) | −1.1907 × 102/1.2945 × 10−1(=) | −1.1906 × 102/1.3686 × 10−1(=) | −1.1902 × 102/1.2587 × 10−1(=) |
| 20 | −1.1891 × 102/8.6824 × 10−2 | −1.1888 × 102/9.6667 × 10−2(=) | −1.1885 × 102/1.0603 × 10−1(=) | −1.1885 × 102/1.0527 × 10−1(=) | −1.1885 × 102/9.6983 × 10−2(=) | |
| 30 | −1.1876 × 102/5.8657 × 10−2 | −1.1873 × 102/5.4940 × 10−2(=) | −1.1874 × 102/5.3362 × 10−2(=) | −1.1870 × 102/5.1004 × 10−2(=) | −1.1872 × 102/4.7621 × 10−2(=) | |
| F8 | 10 | −2.1031 × 102/1.7589 × 101 | −2.8556 × 102/1.4680 × 101(−) | −2.7223 × 102/1.9182 × 101(−) | −2.9346 × 102/1.6692 × 101(−) | −2.8002 × 102/1.9757 × 101(−) |
| 20 | −6.1893 × 101/3.3596 × 101 | −2.5524 × 102/2.1918 × 101(−) | −2.3584 × 102/2.7262 × 101(−) | −2.6230 × 102/3.2670 × 101(−) | −2.4975 × 102/3.3611 × 101(−) | |
| 30 | 9.7566 × 101/4.0362 × 101 | −2.2256 × 102/3.2951 × 101(−) | −1.6840 × 102/3.1401 × 101(−) | −1.1260 × 102/4.4708 × 101(−) | −2.2617 × 102/2.8949 × 101(−) | |
| F9 | 10 | −1.7629 × 102/1.7730 × 101 | −2.8029 × 102/2.2697 × 101(−) | −2.6487 × 102/1.2332 × 101(−) | −2.9478 × 102/1.5338 × 101(−) | −2.7535 × 102/1.8625 × 101(−) |
| 20 | 7.3996 × 101/3.6260 × 101 | −1.1239 × 102/3.3385 × 101(−) | −1.5357 × 102/1.3680 × 101(−) | −1.1359 × 102/3.1975 × 101(−) | −1.4092 × 102/1.9300 × 101(−) | |
| 30 | 4.0272 × 102/4.2241 × 101 | −1.6286 × 102/3.6614 × 101(−) | −1.1403 × 102/2.3933 × 101(−) | −9.3406 × 101/4.1676 × 101(−) | −1.6389 × 102/4.0406 × 101(−) | |
| F10 | 10 | −2.9541 × 102/1.3752 × 10−1 | −2.9552 × 102/1.9088 × 10−1(=) | −2.9555 × 102/1.6229 × 10−1(=) | −2.9557 × 102/2.2424 × 10−1(=) | −2.9554 × 102/1.6612 × 10−1(=) |
| 20 | −2.9075 × 102/1.7213 × 10−1 | −2.9063 × 102/1.6249 × 10−1(=) | −2.9073 × 102/1.9203 × 10−1(=) | −2.9064 × 102/2.0176 × 10−1(=) | −2.9069 × 102/2.1238 × 10−1(=) | |
| 30 | −2.8570 × 102/1.9496 × 10−1 | −2.8577 × 102/1.9317 × 10−1(=) | −2.8597 × 102/2.7387 × 10−1(=) | −2.8580 × 102/2.3075 × 10−1(=) | −2.8587 × 102/2.2160 × 10−1(=) | |
| F11 | 10 | 7.8293 × 102/1.4282 × 102 | 4.0859 × 102/8.5902 × 101(−) | 4.5692 × 102/9.1476 × 101(−) | 4.1606 × 102/8.9614 × 101(−) | 4.3799 × 102/1.3829 × 102(−) |
| 20 | 1.0258 × 103/1.7481 × 102 | 5.9594 × 102/9.8286 × 101(−) | 6.9914 × 102/1.1353 × 102(−) | 5.7719 × 102/7.4371 × 101(−) | 6.0940 × 102/1.0422 × 102(−) | |
| 30 | 1.2613 × 103/1.2295 × 102 | 4.9137 × 102/9.0273 × 101(−) | 6.2205 × 102/9.6358 × 101(−) | 5.1114 × 102/1.3416 × 102(−) | 5.6040 × 102/1.0212 × 102(−) | |
| F12 | 10 | 9.1006 × 102/1.4643 × 10−1 | 1.1360 × 103/6.7100 × 101(+) | 1.2088 × 103/5.1323 × 101(+) | 1.1684 × 103/6.9199 × 101(+) | 1.1621 × 103/5.3208 × 101(+) |
| 20 | 9.1001 × 102/9.8825 × 10−3 | 1.2808 × 103/8.0984 × 101(+) | 1.2678 × 103/4.4563 × 101(+) | 1.2720 × 103/7.2891 × 101(+) | 1.2653 × 103/4.0572 × 101(+) | |
| 30 | 9.1001 × 102/5.5963 × 10−3 | 1.0180 × 103/5.7919 × 101(+) | 1.0939 × 103/3.7824 × 101(+) | 9.9759 × 102/4.3238 × 101(+) | 1.0213 × 103/6.1759 × 101(+) | |
| F13 | 10 | 9.1011 × 102/1.3738 × 10−1 | 1.1264 × 103/6.7088 × 101(+) | 1.2016 × 103/7.0017 × 101(+) | 1.1395 × 103/3.9149 × 101(+) | 1.1673 × 103/6.1350 × 101(+) |
| 20 | 9.1001 × 102/1.6433 × 10−2 | 1.2447 × 103/5.9141 × 101(+) | 1.2806 × 103/5.6512 × 101(+) | 1.2790 × 103/6.7908 × 101(+) | 1.2571 × 103/4.5539 × 101(+) | |
| 30 | 9.1001 × 102/8.4273 × 10−3 | 1.0098 × 103/4.6875 × 101(+) | 1.0963 × 103/3.7419 × 101(+) | 9.9866 × 102/3.4782 × 101(+) | 1.0440 × 103/6.4525 × 101(+) | |
| F14 | 10 | 9.1010 × 102/1.8543 × 10−1 | 1.1254 × 103/7.7471 × 101(+) | 1.2085 × 103/5.6439 × 101(+) | 1.1744 × 103/9.4485 × 101(+) | 1.1591 × 103/8.3353 × 101(+) |
| 20 | 9.1001 × 102/7.5166 × 10−3 | 1.2435 × 103/7.2796 × 101(+) | 1.2788 × 103/5.1990 × 101(+) | 1.2569 × 103/8.4563 × 101(+) | 1.2566 × 103/3.8660 × 101(+) | |
| 30 | 9.1001 × 102/4.6669 × 10−3 | 9.9491 × 102/4.8337 × 101(+) | 1.0910 × 103/4.7972 × 101(+) | 1.0076 × 103/6.3577 × 101(+) | 1.0462 × 103/6.7583 × 101(+) | |
| +/=/− | 24/5/13 | 24/6/12 | 25/6/11 | 25/6/11 |
| No. | D | MSAMT | HSAOA | DSP-SAEA | BiS-SAEA | FSAPSO |
|---|---|---|---|---|---|---|
| F1 | 50 | 1.5139 × 10−3/2.9703 × 10−3 | 6.6420 × 10−4/1.1716 × 10−3(−) | 8.5655 × 100/2.3768 × 100(+) | 3.5827 × 101/1.0570 × 102(+) | 8.6070 × 100/4.2065 × 100(+) |
| F1 | 100 | 2.2974 × 10−3/4.1236 × 10−3 | 2.7541 × 10−1/5.4010 × 10−1(+) | 2.2511 × 102/3.6066 × 101(+) | 5.6663 × 102/4.9770 × 102(+) | 1.7318 × 102/7.0301 × 101(+) |
| F2 | 50 | 4.8989 × 101/2.0683 × 10−2 | 4.9004 × 101/3.8941 × 10−1(+) | 6.4929 × 101/8.2349 × 100(+) | 3.5411 × 102/3.4942 × 102(+) | 9.0141 × 101/2.3460 × 101(+) |
| F2 | 100 | 9.8980 × 101/2.6847 × 10−2 | 1.0434 × 102/2.6441 × 100(+) | 3.6493 × 102/4.7918 × 101(+) | 8.9207 × 102/3.4642 × 102(+) | 2.9185 × 102/3.7701 × 101(+) |
| F3 | 50 | 1.5949 × 10−2/1.7975 × 10−2 | 2.1525 × 10−4/4.6254 × 10−5(−) | 7.0014 × 100/1.3281 × 100(+) | 8.9919 × 100/3.6852 × 100(+) | 7.5177 × 100/7.1600 × 10−1(+) |
| F3 | 100 | 1.6202 × 10−2/1.6438 × 10−2 | 2.1473 × 10−2/1.0452 × 10−2(+) | 7.9457 × 100/4.3654 × 10−1(+) | 1.5824 × 101/1.9239 × 100(+) | 1.3845 × 101/1.3817 × 100(+) |
| F4 | 50 | 2.3249 × 10−2/3.9907 × 10−2 | 2.1299 × 10−1/1.3435 × 10−1(+) | 1.1393 × 100/4.7626 × 10−2(+) | 4.5965 × 10−1/1.6026 × 10−1(+) | 7.7063 × 10−1/6.8645 × 10−2(+) |
| F4 | 100 | 2.5404 × 10−2/4.1350 × 10−2 | 2.1299 × 10−1/1.3435 × 10−1(+) | 5.9262 × 100/8.2541 × 10−1(+) | 1.5578 × 101/2.7415 × 101(+) | 3.0273 × 100/1.0937 × 100(+) |
| F5 | 50 | 4.3405 × 10−3/8.5700 × 10−3 | 1.1369 × 102/3.9883 × 101(+) | 3.9735 × 102/3.8838 × 101(+) | 1.4639 × 102/6.6315 × 101(+) | 1.1791 × 102/3.1529 × 101(+) |
| F5 | 100 | 1.3211 × 10−2/2.5329 × 10−2 | 4.3194 × 102/2.2999 × 102(+) | 8.6395 × 102/3.0622 × 101(+) | 5.3052 × 102/1.2590 × 102(+) | 7.1114 × 102/1.2708 × 102(+) |
| F6 | 50 | 4.1817 × 109/1.0109 × 109 | 2.0962 × 108/8.6102 × 107(−) | 3.1424 × 108/9.2524 × 107(−) | 1.4923 × 108/6.2721 × 107(−) | 1.4518 × 108/4.9036 × 107(−) |
| F6 | 100 | 7.4188 × 109/1.0592 × 109 | 8.1092 × 109/1.4021 × 109(+) | 8.1388 × 109/1.5812 × 109(+) | 9.6883 × 109/2.0580 × 109(+) | 8.9691 × 109/1.4803 × 109(+) |
| F7 | 50 | −1.1865 × 102/4.2963 × 10−2 | −1.1862 × 102/4.9648 × 10−2(=) | −1.1865 × 102/5.0892 × 10−2(=) | −1.1862 × 102/4.5914 × 10−2(=) | −1.1863 × 102/3.7352 × 10−2(=) |
| F7 | 100 | −1.1853 × 102/3.9229 × 10−2 | −1.1852 × 102/3.9939 × 10−2(=) | −1.1852 × 102/2.9043 × 10−2(=) | −1.1851 × 102/2.4057 × 10−2(=) | −1.1852 × 102/3.1575 × 10−2(=) |
| F8 | 50 | 4.7430 × 102/4.0367 × 101 | 6.2601 × 101/4.0803 × 101(−) | 1.5347 × 102/3.5406 × 101(−) | −5.2526 × 101/4.7545 × 101(−) | −8.6248 × 101/4.4722 × 101(−) |
| F8 | 100 | 1.3291 × 103/5.3634 × 101 | 8.6902 × 102/6.8374 × 101(−) | 7.4663 × 102/5.4666 × 101(−) | 4.2095 × 102/7.9754 × 101(−) | 6.8752 × 102/1.1339 × 102(−) |
| F9 | 50 | 9.8795 × 102/5.0244 × 101 | 2.9357 × 102/1.0638 × 102(−) | 2.3344 × 102/4.2587 × 101(−) | 1.0728 × 102/7.2037 × 101(−) | −1.4294 × 101/4.0704 × 101(−) |
| F9 | 100 | 2.0480 × 103/5.4173 × 101 | 1.7680 × 103/1.3779 × 102(−) | 1.0183 × 103/7.6560 × 101(−) | 1.5369 × 103/1.6818 × 102(−) | 1.3951 × 103/1.7096 × 102(−) |
| F10 | 50 | −2.7589 × 102/1.8276 × 10−1 | −2.7594 × 102/2.2129 × 10−1(=) | −2.7613 × 102/3.6886 × 10−1(−) | −2.7589 × 102/2.0396 × 10−1(=) | −2.7618 × 102/1.7560 × 10−1(−) |
| F10 | 100 | −2.5137 × 102/1.6843 × 10−1 | −2.5114 × 102/1.7815 × 10−1(=) | −2.5120 × 102/1.6293 × 10−1(=) | −2.5107 × 102/1.8699 × 10−1(=) | −2.5129 × 102/2.6863 × 10−1(=) |
| F11 | 50 | 1.4403 × 103/8.7875 × 101 | 6.3811 × 102/1.3438 × 102(−) | 6.0781 × 102/6.7380 × 101(−) | 5.7609 × 102/8.6520 × 101(−) | 4.8557 × 102/9.5737 × 101(−) |
| F11 | 100 | 1.5965 × 103/5.8848 × 101 | 9.4489 × 102/9.5478 × 101(−) | 6.7137 × 102/3.6199 × 101(−) | 8.4819 × 102/7.7597 × 101(−) | 7.7777 × 102/9.1593 × 101(−) |
| F12 | 50 | 9.1000 × 102/2.2301 × 10−3 | 9.2622 × 102/7.2549 × 101(+) | 1.1402 × 103/3.9379 × 101(+) | 1.0975 × 103/5.4559 × 101(+) | 1.1225 × 103/5.2349 × 101(+) |
| F12 | 100 | 9.1000 × 102/3.2326 × 10−3 | 1.0103 × 103/5.1691 × 101(+) | 1.2434 × 103/4.7584 × 101(+) | 1.4063 × 103/3.4757 × 101(+) | 1.4119 × 103/3.9495 × 101(+) |
| F13 | 50 | 9.1000 × 102/4.4973 × 10−3 | 9.4249 × 102/1.0050 × 102(+) | 1.1483 × 103/4.3132 × 101(+) | 1.1096 × 103/6.5641 × 101(+) | 1.1379 × 103/5.7170 × 101(+) |
| F13 | 100 | 9.1000 × 102/4.4477 × 10−3 | 1.0144 × 103/6.9600 × 101(+) | 1.2516 × 103/4.2059 × 101(+) | 1.4071 × 103/4.0183 × 101(+) | 1.4066 × 103/3.1890 × 101(+) |
| F14 | 50 | 9.1000 × 102/3.8153 × 10−3 | 9.3946 × 102/9.2767 × 101(+) | 1.1362 × 103/3.0108 × 101(+) | 1.1092 × 103/5.7922 × 101(+) | 1.1373 × 103/5.5069 × 101(+) |
| F14 | 100 | 9.1000 × 102/2.9016 × 10−3 | 1.0065 × 103/4.9499 × 101(+) | 1.2338 × 103/3.9768 × 101(+) | 1.4038 × 103/3.4837 × 101(+) | 1.4129 × 103/2.9752 × 101(+) |
| +/=/− | 15/4/9 | 17/3/8 | 17/4/7 | 17/3/8 |
| No. | D | MSAMT | GL-SADE | LSADE |
|---|---|---|---|---|
| F1 | 50 | 1.5139 × 10−3/2.9703 × 10−3 | 1.5209 × 103/1.3836 × 102(+) | 1.9977 × 102/6.6385 × 101(+) |
| F1 | 100 | 2.2974 × 10−3/4.1236 × 10−3 | 1.1735 × 104/7.3673 × 102(+) | 3.1721 × 103/4.0235 × 102(+) |
| F2 | 50 | 4.8989 × 101/2.0683 × 10−2 | 1.6358 × 103/1.3374 × 102(+) | 2.2193 × 102/5.4929 × 101(+) |
| F2 | 100 | 9.8980 × 101/2.6847 × 10−2 | 7.4367 × 103/6.0353 × 102(+) | 1.2336 × 103/2.1562 × 102(+) |
| F3 | 50 | 1.5949 × 10−2/1.7975 × 10−2 | 1.6100 × 101/1.0188 × 100(+) | 1.2094 × 101/1.8939 × 100(+) |
| F3 | 100 | 1.6202 × 10−2/1.6438 × 10−2 | 1.9667 × 101/2.3333 × 10−1(+) | 1.6278 × 101/9.3989 × 10−1(+) |
| F4 | 50 | 2.3249 × 10−2/3.9907 × 10−2 | 2.2429 × 100/6.5393 × 10−1(+) | 2.2290 × 101/1.0124 × 101(+) |
| F4 | 100 | 2.5404 × 10−2/4.1350 × 10−2 | 8.1014 × 102/4.3202 × 101(+) | 2.4936 × 102/2.2081 × 101(+) |
| F5 | 50 | 4.3405 × 10−3/8.5700 × 10−3 | 5.3532 × 102/2.2348 × 101(+) | 3.3873 × 102/5.7416 × 101(+) |
| F5 | 100 | 1.3211 × 10−2/2.5329 × 10−2 | 1.1977 × 103/3.8349 × 101(+) | 9.8004 × 102/7.2114 × 101(+) |
| F6 | 50 | 4.1817 × 109/1.0109 × 109 | 1.2078 × 109/2.2629 × 108(−) | 6.4619 × 108/2.7999 × 108(−) |
| F6 | 100 | 7.4188 × 109/1.0592 × 109 | 1.3133 × 1010/2.7524 × 109(+) | 1.1618 × 1010/2.7631 × 109(+) |
| F7 | 50 | −1.1865 × 102/4.2963 × 10−2 | −1.1864 × 102/4.4538 × 10−2(=) | −1.1863 × 102/4.8161 × 10−2(=) |
| F7 | 100 | −1.1853 × 102/3.9229 × 10−2 | −1.1851 × 102/2.3853 × 10−2(=) | −1.1851 × 102/2.2915 × 10−2(=) |
| F8 | 50 | 4.7430 × 102/4.0367 × 101 | 1.6206 × 102/2.1817 × 101(−) | −2.1994 × 101/6.1268 × 101(−) |
| F8 | 100 | 1.3291 × 103/5.3634 × 101 | 8.4853 × 102/4.9467 × 101(−) | 6.0061 × 102/7.1430 × 101(−) |
| F9 | 50 | 9.8795 × 102/5.0244 × 101 | 2.3591 × 102/2.6033 × 101(−) | 5.2861 × 101/7.8954 × 101(−) |
| F9 | 100 | 2.0480 × 103/5.4173 × 101 | 1.1228 × 103/5.3780 × 101(−) | 1.0077 × 103/8.6161 × 101(−) |
| F10 | 50 | −2.7589 × 102/1.8276 × 10−1 | −2.7585 × 102/1.6298 × 10−1(=) | −2.7601 × 102/2.2793 × 10−1(−) |
| F10 | 100 | −2.5137 × 102/1.6843 × 10−1 | −2.5103 × 102/2.1463 × 10−1(=) | −2.5108 × 102/1.6621 × 10−1(=) |
| F11 | 50 | 1.4403 × 103/8.7875 × 101 | 6.1039 × 102/4.4920 × 101(−) | 5.3563 × 102/9.5648 × 101(−) |
| F11 | 100 | 1.5965 × 103/5.8848 × 101 | 7.0087 × 102/3.1616 × 101(−) | 6.4495 × 102/3.7649 × 101(−) |
| F12 | 50 | 9.1000 × 102/2.2301 × 10−3 | 1.0618 × 103/4.2980 × 101(+) | 1.0789 × 103/6.2427 × 101(+) |
| F12 | 100 | 9.1000 × 102/3.2326 × 10−3 | 1.5139 × 103/3.7043 × 101(+) | 1.4640 × 103/3.0232 × 101(+) |
| F13 | 50 | 9.1000 × 102/4.4973 × 10−3 | 1.0569 × 103/4.4095 × 101(+) | 1.0810 × 103/6.3660 × 101(+) |
| F13 | 100 | 9.1000 × 102/4.4477 × 10−3 | 1.5028 × 103/4.1610 × 101(+) | 1.4625 × 103/2.8474 × 101(+) |
| F14 | 50 | 9.1000 × 102/3.8153 × 10−3 | 1.0662 × 103/4.2043 × 101(+) | 1.0799 × 103/6.1347 × 101(+) |
| F14 | 100 | 9.1000 × 102/2.9016 × 10−3 | 1.5147 × 103/2.9138 × 101(+) | 1.4620 × 103/2.8016 × 101(+) |
| +/=/− | 17/4/7 | 17/3/8 |
| Methods | Optimal Structural Parameters | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MSAMT | 1.17 × 100 | 1.16 × 100 | 1.18 × 100 | 2.16 × 1011 | 3.52 × 10−3 | 2.20 × 1011 | 3.37 × 10−3 | 2.12 × 1011 | 3.45 × 10−3 | 2.19 × 1011 | 3.54 × 10−3 | 2.15 × 1011 | 3.36 × 10−3 | 2.19 × 1011 | 3.48 × 10−3 |
| HSAOA | 1.03 × 100 | 1.00 × 100 | 1.02 × 100 | 2.11 × 1011 | 3.10 × 10−3 | 2.09 × 1011 | 3.03 × 10−3 | 1.99 × 1011 | 2.88 × 10−3 | 2.16 × 1011 | 3.05 × 10−3 | 2.12 × 1011 | 2.89 × 10−3 | 2.12 × 1011 | 3.09 × 10−3 |
| DSP−SAEA | 1.02 × 100 | 1.02 × 100 | 1.03 × 100 | 2.07 × 1011 | 3.30 × 10−3 | 2.19 × 1011 | 3.06 × 10−3 | 1.98 × 1011 | 3.01 × 10−3 | 2.17 × 1011 | 3.29 × 10−3 | 2.17 × 1011 | 3.17 × 10−3 | 2.08 × 1011 | 2.93 × 10−3 |
| BiS−SAHA | 1.00 × 100 | 9.59 × 10−1 | 9.93 × 10−1 | 2.13 × 1011 | 2.97 × 10−3 | 2.21 × 1011 | 2.90 × 10−3 | 1.97 × 1011 | 3.11 × 10−3 | 2.15 × 1011 | 2.92 × 10−3 | 2.08 × 1011 | 2.89 × 10−3 | 2.09 × 1011 | 3.03 × 10−3 |
| FSAPSO | 1.01 × 100 | 1.00 × 100 | 9.98 × 10−1 | 2.11 × 1011 | 2.99 × 10−3 | 2.15 × 1011 | 2.98 × 10−3 | 2.02 × 1011 | 2.94 × 10−3 | 2.12 × 1011 | 3.15 × 10−3 | 2.11 × 1011 | 2.95 × 10−3 | 2.10 × 1011 | 2.96 × 10−3 |
| Abbreviations | Full Word |
|---|---|
| SAEAs | Surrogate-assisted evolutionary algorithms |
| MSAMT | Multi-surrogate-assisted multi-tasking optimization algorithm |
| EAs | Evolutionary algorithms |
| GA | Genetic algorithm |
| DE | Differential evolution |
| PSO | Particle swarm optimization |
| FEs | Fitness evaluations |
| RBF | Radial basis function |
| TLBO | Teaching-learning-based optimization |
| GNN | Graphical neural network |
| SL-PSO | Social learning particle swarm optimization |
| MTO | Multi-task optimization |
| G-MFEA | Generalized multi-factorial evolutionary algorithm |
| PR | Polynomial regression |
| PRS | Polynomial response surface |
| SVR | Support vector regression |
| UES | Unified ensemble of surrogates |
| DES | Dynamic ensemble of surrogates |
| MFEA | Multi-factorial evolutionary algorithm |
| LHS | Latin hypercube sampling |
| DSES | Dynamic selection for the ensemble surrogate |
| RSM | Response surface model |
References
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimedia Tools Appl. 2020, 80, 8091–8126. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Yang, G.Y. A modified particle swarm optimizer algorithm. In Proceedings of the International Conference on Electronic Measurement and Instruments, Xi’an, China, 16–18 August 2007; pp. 2675–2679. [Google Scholar]
- Ong, Y.S.; Keane, A.J. Meta-Lamarckian learning in memetic algorithms. IEEE Trans. Evol. Comput. 2004, 8, 99–110. [Google Scholar] [CrossRef]
- Nelson, A.L.; Barlow, G.J.; Doitsidis, L. Fitness functions in evolutionary robotics: A survey and analysis. Robot. Auton. Syst. 2009, 57, 345–370. [Google Scholar] [CrossRef]
- Niyato, D.; Hossain, E. Dynamics of network selection in heterogeneous wireless networks: An evolutionary game approach. IEEE Trans. Veh. Technol. 2009, 58, 2008–2017. [Google Scholar] [CrossRef]
- Chai, R.; Savvaris, A.; Tsourdos, A.; Xia, Y.; Chai, S. Solving multiobjective constrained trajectory optimization problem by an extended evolutionary algorithm. IEEE Trans. Cybern. 2020, 50, 1630–1643. [Google Scholar] [CrossRef] [PubMed]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Xia, Y.; Chai, S. Multiobjective optimal parking maneuver planning of autonomous wheeled vehicles. IEEE Trans. Ind. Electron. 2019, 67, 10809–10821. [Google Scholar] [CrossRef]
- Jin, Y.; Wang, H.; Chugh, T.; Guo, D.; Miettinen, K. Data-driven evolutionary optimization: An overview and case studies. IEEE Trans. Evol. Comput. 2019, 23, 442–458. [Google Scholar] [CrossRef]
- Shi, L.; Rasheed, K. A survey of fitness approximation methods applied in evolutionary algorithms. In Computational Intelligence in Expensive Optimization Problems; Springer: Berlin/Heidelberg, Germany, 2010; pp. 3–28. [Google Scholar]
- Branke, J.; Schmidt, C. Faster convergence by means of fitness estimation. Soft Comput. 2003, 9, 13–20. [Google Scholar] [CrossRef]
- Wang, X.; Wang, G.G.; Song, B.; Wang, P.; Wang, Y. A novel evolutionary sampling assisted optimization method for high-dimensional expensive problems. IEEE Trans. Evol. Comput. 2019, 23, 815–827. [Google Scholar] [CrossRef]
- Guo, D.; Jin, Y.; Ding, J.; Chai, T. Heterogeneous ensemble-based infill criterion for evolutionary multiobjective optimization of expensive problems. IEEE Trans. Cybern. 2019, 49, 1012–1025. [Google Scholar] [CrossRef]
- Yu, M.; Liang, J.; Wu, Z.; Yang, Z. A twofold infill criterion-driven heterogeneous ensemble surrogate-assisted evolutionary algorithm for computationally expensive problems. Knowl.-Based Syst. 2022, 236, 107747. [Google Scholar] [CrossRef]
- Li, F.; Shen, W.; Cai, X.; Gao, L. A fast surrogate-assisted particle swarm optimization algorithm for computationally expensive problems. Appl. Soft Comput. 2020, 92, 106303. [Google Scholar] [CrossRef]
- Li, F.; Cai, X.; Gao, L.; Shen, W. A surrogate-assisted multiswarm optimization algorithm for high-dimensional computationally expensive problems. IEEE Trans. Cybern. 2021, 51, 1390–1402. [Google Scholar] [CrossRef]
- Nourian, N.; El-Badry, M.; Jamshidi, M. Design optimization of truss structures using a graph neural network-based surrogate model. Algorithms 2023, 16, 380. [Google Scholar] [CrossRef]
- Cai, X.; Gao, L.; Li, X. Efficient generalized surrogate-assisted evolutionary algorithm for high-dimensional expensive problems. IEEE Trans. Evol. Comput. 2020, 24, 365–379. [Google Scholar] [CrossRef]
- Pan, J.S.; Liu, N.; Chu, S.C.; Lai, T. An efficient surrogate-assisted hybrid optimization algorithm for expensive optimization problems. Inf. Sci. 2021, 561, 304–325. [Google Scholar] [CrossRef]
- Sun, C.; Jin, Y.; Zeng, J.; Yu, Y. A two-layer surrogate-assisted particle swarm optimization algorithm. Soft Comput. 2014, 19, 1461–1475. [Google Scholar] [CrossRef]
- Wang, W.; Liu, H.L.; Tan, K.C. A surrogate-assisted differential evolution algorithm for high-dimensional expensive optimization problems. IEEE Trans. Cybern. 2023, 53, 2685–2697. [Google Scholar] [CrossRef]
- Kůdela, J.; Matoušek, R. Combining Lipschitz and RBF surrogate models for high-dimensional computationally expensive problems. Inf. Sci. 2023, 619, 457–477. [Google Scholar] [CrossRef]
- Rumpfkeil, M.P.; Bryson, D.; Beran, P. Multi-fidelity sparse polynomial chaos and kriging surrogate models applied to analytical benchmark problems. Algorithms 2022, 15, 101. [Google Scholar] [CrossRef]
- Liu, N.; Pan, J.S.; Chu, S.C.; Lai, T. A surrogate-assisted bi-swarm evolutionary algorithm for expensive optimization. Appl. Intell. 2022, 53, 12448–12471. [Google Scholar] [CrossRef]
- Ren, Z.; Sun, C.; Tan, Y.; Zhang, G.; Qin, S. A bi-stage surrogate-assisted hybrid algorithm for expensive optimization problems. Complex Intell. Syst. 2021, 7, 1391–1405. [Google Scholar] [CrossRef]
- Li, X.; Li, S. An adaptive surrogate-assisted particle swarm optimization for expensive problems. Soft Comput. 2021, 25, 15051–15065. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Tan, S. Decision space partition based surrogate-assisted evolutionary algorithm for expensive optimization. Expert Syst. Appl. 2023, 214, 119075. [Google Scholar] [CrossRef]
- Zhang, J.; Li, M.; Yue, X.; Shi, M. A hierarchical surrogate assisted optimization algorithm using teaching-learning-based optimization and differential evolution for high-dimensional expensive problems. Appl. Soft Comput. 2024, 152, 111212. [Google Scholar] [CrossRef]
- Wu, G.; Mallipeddi, R.; Suganthan, P.N. Ensemble strategies for population-based optimization algorithms–A survey. Swarm Evol. Comput. 2019, 44, 695–711. [Google Scholar] [CrossRef]
- Liao, P.; Sun, C.; Zhang, G.; Jin, Y. Multi-surrogate multi-tasking optimization of expensive problems. Knowl.-Based Syst. 2020, 205, 106262. [Google Scholar] [CrossRef]
- Yang, S.; Qi, Y.; Yang, R.; Ma, X.; Zhang, H. A surrogate assisted evolutionary multitasking optimization algorithm. Appl. Soft Comput. 2023, 132, 109775. [Google Scholar] [CrossRef]
- Akopov, A.S.; Hevencev, M.A. A multi-agent genetic algorithm for multi-objective optimization. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013. [Google Scholar]
- Zhong, W.; Liu, J.; Xue, M.; Jiao, L. A multiagent genetic algorithm for global numerical optimization. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 1128–1141. [Google Scholar] [CrossRef] [PubMed]
- Gupta, A.; Ong, Y.S.; Feng, L. Multifactorial evolution: Toward evolutionary multitasking. IEEE Trans. Evol. Comput. 2016, 20, 343–357. [Google Scholar] [CrossRef]
- Ding, J.; Yang, C.; Jin, Y.; Chai, T. Generalized multitasking for evolutionary optimization of expensive problems. IEEE Trans. Evol. Comput. 2017, 23, 44–58. [Google Scholar] [CrossRef]
- Box, G.E.P.; Wilson, K.B. On the experimental attainment of optimum conditions. In Breakthroughs in Statistics: Methodology and Distribution; Springer: New York, NY, USA, 1992; pp. 270–310. [Google Scholar]
- Hardy, R.L. Multiquadric equations of topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Zhang, J.; Yue, X.; Qiu, J.; Zhang, M.; Wang, X. A unified ensemble of surrogates with global and local measures for global metamodelling. Eng. Optim. 2021, 53, 474–495. [Google Scholar] [CrossRef]
| Algorithm | Author, References | Surrogate Models | Evolutionary Algorithms | Year |
|---|---|---|---|---|
| MFEA | Gupta et al. [34] | × | MFEA | 2016 |
| G-MFEA | Ding et al. [35] | × | GMFEA | 2017 |
| FSAPSO | Li et al. [15] | RBF | PSO | 2020 |
| BiS-SAHA | Ren et al. [25] | RBF | SL-PSO, DE | 2021 |
| GL-SADE | Wang et al. [21] | RBF, Kriging | DE | 2023 |
| LSADE | Kůdela et al. [22] | RBF, Lipschitz | DE | 2023 |
| DSP-SAEA | Liu et al. [27] | RBF, Kriging, and polynomial regression (PR) | PSO | 2023 |
| SAMTO | Yang et al. [31] | Kriging, RBF | MFEA | 2023 |
| HSAOA | Zhang et al. [28] | RBF, PRS, and SVR | TLBO, DE | 2024 |
| No. | Problem | Dimension | Optimum | Property |
|---|---|---|---|---|
| F1 | Ellipsoid | 10, 20, 30, 50, and 100 | 0 | Unimodal |
| F2 | Rosenbrock | 10, 20, 30, 50, and 100 | 0 | Multimodal with narrow valleys |
| F3 | Ackley | 10, 20, 30, 50, and 100 | 0 | Multimodal |
| F4 | Griewank | 10, 20, 30, 50, and 100 | 0 | Multimodal |
| F5 | Rastrigin | 10, 20, 30, 50, and 100 | 0 | Multimodal |
| F6 | Shifted Rotated High Conditioned Elliptic Function | 10, 20, 30, 50, and 100 | −450 | Unimodal, shifted, rotated, and non-separable |
| F7 | Shifted Rotated Ackley’s Function with Global Optimum on Bounds | 10, 20, 30, 50, and 100 | −140 | Multimodal, shifted, rotated, and non-separable |
| F8 | Shifted Rastrigin | 10, 20, 30, 50, and 100 | −330 | Multimodal, shifted and separable |
| F9 | Shifted Rotated Rastrigin | 10, 20, 30, 50, and 100 | −330 | Very complicated multimodal |
| F10 | Shifted Rotated Expanded Scaffer’s F6 (Shifted Rosenbrock’s Function) Function | 10, 20, 30, 50, and 100 | −300 | Multimodal, shifted, and non-separable |
| F11 | Rotated Hybrid Composition Function 1 | 10, 20, 30, 50, and 100 | 120 | Very complicated multimodal |
| F12 | Rotated Hybrid Composition Function 2 | 10, 20, 30, 50, and 100 | 10 | Multimodal, rotated, and non-separable |
| F13 | Rotated Hybrid Composition Function 2 with a Narrow Basin for the Global Optimum | 10, 20, 30, 50, and 100 | 10 | Very complicated multimodal |
| F14 | Rotated Hybrid Composition Function 2 with the Global Optimum on the Bounds | 10, 20, 30, 50, and 100 | 10 | Multimodal, non-separable, and global optimum on the bound |
| Parameters | Initial Values | Upper Bounds | Lower Bounds |
| // | |||
| ///// | |||
| ///// |
| Methods | Statistical Results | |||
|---|---|---|---|---|
| Best | Worst | Mean | Std | |
| MSAMT | ||||
| HSAOA | ||||
| DSP-SAEA | ||||
| BiS-SAHA | ||||
| FSAPSO | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chen, L.; Zhang, J.; Li, M. A Multi-Surrogate Assisted Multi-Tasking Optimization Algorithm for High-Dimensional Expensive Problems. Algorithms 2025, 18, 4. https://doi.org/10.3390/a18010004
Li H, Chen L, Zhang J, Li M. A Multi-Surrogate Assisted Multi-Tasking Optimization Algorithm for High-Dimensional Expensive Problems. Algorithms. 2025; 18(1):4. https://doi.org/10.3390/a18010004
Chicago/Turabian StyleLi, Hongyu, Lei Chen, Jian Zhang, and Muxi Li. 2025. "A Multi-Surrogate Assisted Multi-Tasking Optimization Algorithm for High-Dimensional Expensive Problems" Algorithms 18, no. 1: 4. https://doi.org/10.3390/a18010004
APA StyleLi, H., Chen, L., Zhang, J., & Li, M. (2025). A Multi-Surrogate Assisted Multi-Tasking Optimization Algorithm for High-Dimensional Expensive Problems. Algorithms, 18(1), 4. https://doi.org/10.3390/a18010004