A Two-Phase Approach for Single Container Loading with Weakly Heterogeneous Boxes




Abstract
1. Introduction
- Orientation constraint: In principle, a box can be loaded in up to six orientations. However, in practice, some of them may be prohibited.
- Stability constraint: Boxes that are not loaded directly on the container floor must be fully supported by top surfaces of one or more boxes.
- Conventional heuristics, which take advantage of the specific problem structure. A classical example is the wall-building procedure of George and Robinson [5], where the loading is made layer-by-layer across the depth of the container. Other examples of problem-dependent techniques applied to solve the CLP can be found in [6,7,8].
- Metaheuristics, which have been extensively applied to the CLP. Parreño et al. [9], for instance, conceived of a constructive procedure based on maximal-space representation. Insertion and deletion shifts directly affecting the container layout were used in a variable neighborhood search to improve partial solutions. Further studies include co-evolutionary computation techniques (e.g., Genetic Algorithms (GAs) [10,11]), trajectory-based methods (e.g., simulated annealing [12], the greedy randomized adaptive search procedure [13], and tabu search [14]), and swarm intelligence systems (e.g., bee colony algorithm [15]).
2. Block-Loading Hybrid Metaheuristic
2.1. Block Generation
| Algorithm 1 Generating simple blocks (adapted from the original paper [7]). |
| Input: A container with dimensions L, W, and H and a collection of boxes grouped into types. Each type t has a length , a width , a height , and a quantity of boxes available to be loaded. Output: Set B of simple blocks.
|
| Algorithm 2 Generating guillotine blocks (adapted from the original paper [7]). |
| Input: Set B of simple blocks (see Algorithm 1). Output: Extended set B of guillotine blocks.
|
2.2. Block Loading
2.2.1. ILP Model
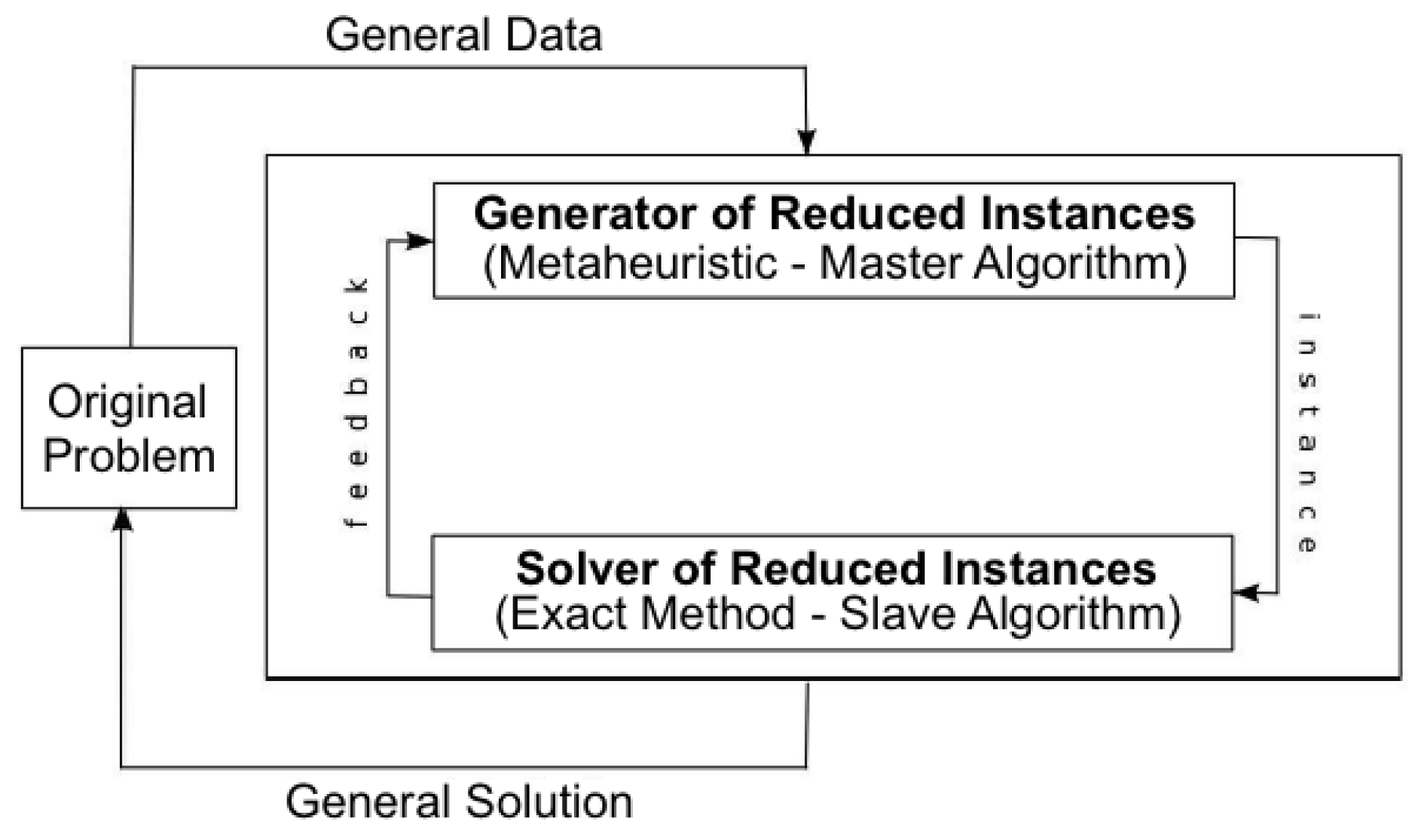
2.2.2. Generate-and-Solve
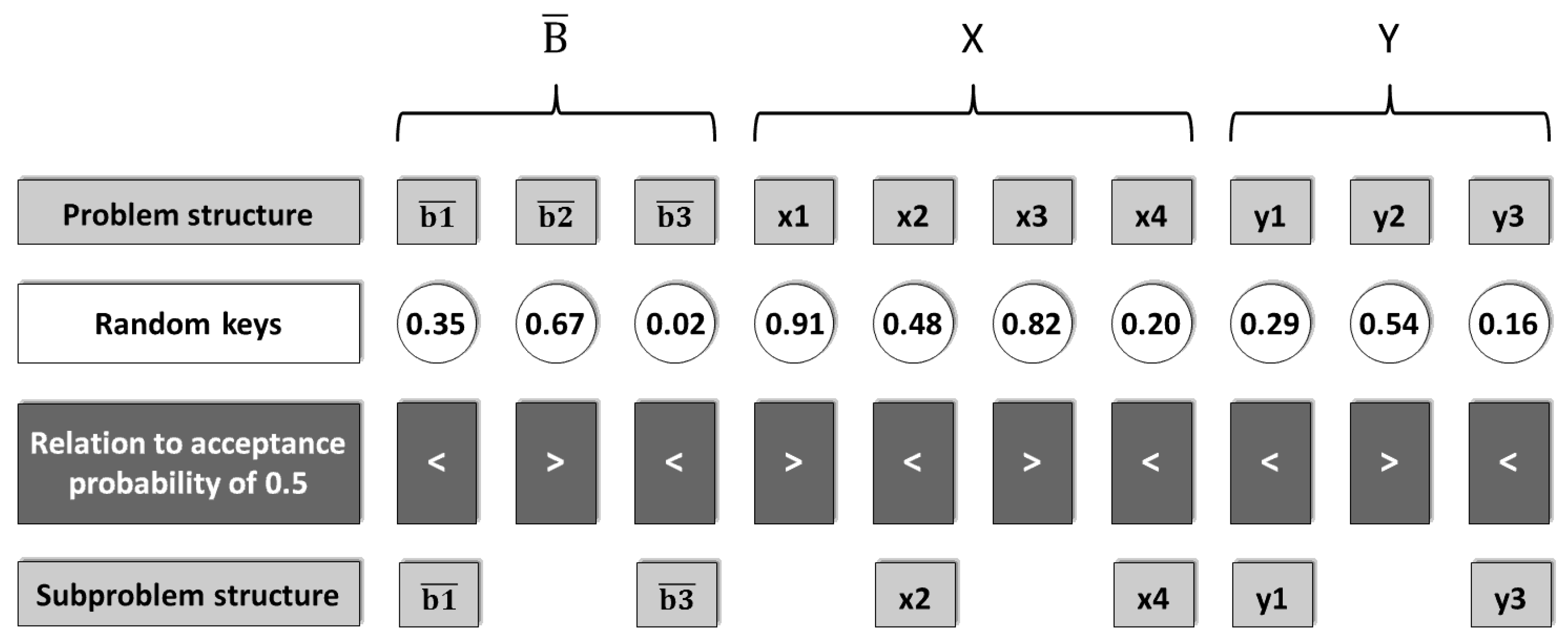
2.2.3. Random Key Genetic Algorithm
3. Computational Experiments
3.1. Control Parameters and Calibration
3.2. Numerical Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BLHM | Block-Loading Hybrid Metaheuristic |
| BS | Beam Search |
| C&P | Cutting-and-Packing |
| CLP | Container Loading Problem |
| CLTRS | Container Loading by TRee Search |
| FSB | Fully-Supported Block |
| GA | Genetic Algorithm |
| GRI | Generator of Reduced Instances |
| GS | Generate-and-Solve |
| ID-GLTS | Iterative-Doubling Greedy-Lookahead Tree Search |
| ILP | Integer Linear Programming |
| MBC | Minimum Bounding Cuboid |
| RKGA | Random Key Genetic Algorithm |
| SRI | Solver of Reduced Instances |
References
- Wäscher, G.; Haußner, H.; Schumann, H. An improved typology of cutting and packing problems. Eur. J. Oper. Res. 2007, 183, 1109–1130. [Google Scholar] [CrossRef]
- Bortfeldt, A.; Wäscher, G. Constraints in container loading—A state-of-the-art review. Eur. J. Oper. Res. 2013, 229, 1–20. [Google Scholar] [CrossRef]
- Scheithauer, G. Algorithms for the container loading problem. In Operations Research Proceedings 1991; Springer: Berlin, Germany, 1992; pp. 445–452. [Google Scholar]
- Fanslau, T.; Bortfeldt, A. A tree search algorithm for solving the container loading problem. INFORMS J. Comput. 2010, 22, 222–235. [Google Scholar] [CrossRef]
- George, J.A.; Robinson, D.F. A heuristic for packing boxes into a container. Comput. Oper. Res. 1980, 7, 147–156. [Google Scholar] [CrossRef]
- Bischoff, E.E.; Ratcliff, M. Issues in the development of approaches to container loading. Omega 1995, 23, 377–390. [Google Scholar] [CrossRef]
- Zhu, W.; Lim, A. A new iterative-doubling Greedy–Lookahead algorithm for the single container loading problem. Eur. J. Oper. Res. 2012, 222, 408–417. [Google Scholar] [CrossRef]
- Araya, I.; Riff, M.C. A beam search approach to the container loading problem. Comput. Oper. Res. 2014, 43, 100–107. [Google Scholar] [CrossRef]
- Parreño, F.; Alvarez-Valdés, R.; Oliveira, J.; Tamarit, J.M. Neighborhood structures for the container loading problem: A VNS implementation. J. Heuristics 2010, 16, 1–22. [Google Scholar] [CrossRef]
- Gonçalves, J.F.; Resende, M.G. A parallel multi-population biased random-key genetic algorithm for a container loading problem. Comput. Oper. Res. 2012, 39, 179–190. [Google Scholar] [CrossRef]
- Gehring, H.; Bortfeldt, A. A genetic algorithm for solving the container loading problem. Int. Trans. Oper. Res. 1997, 4, 401–418. [Google Scholar] [CrossRef]
- Mack, D.; Bortfeldt, A.; Gehring, H. A parallel hybrid local search algorithm for the container loading problem. Int. Trans. Oper. Res. 2004, 11, 511–533. [Google Scholar] [CrossRef]
- Moura, A.; Oliveira, J.F. A GRASP approach to the container-loading problem. IEEE Intell. Syst. 2005, 20, 50–57. [Google Scholar] [CrossRef]
- Liu, J.; Yue, Y.; Dong, Z.; Maple, C.; Keech, M. A novel hybrid tabu search approach to container loading. Comput. Oper. Res. 2011, 38, 797–807. [Google Scholar] [CrossRef]
- Dereli, T.; Das, G.S. A hybrid ‘bee(s) algorithm’ for solving container loading problems. Appl. Soft Comput. 2011, 11, 2854–2862. [Google Scholar] [CrossRef]
- Morabito, R.; Arenales, M. An AND/OR-graph approach to the container loading problem. Int. Trans. Oper. Res. 1994, 1, 59–73. [Google Scholar] [CrossRef]
- Eley, M. Solving container loading problems by block arrangement. Eur. J. Oper. Res. 2002, 141, 393–409. [Google Scholar] [CrossRef]
- Pisinger, D. Heuristics for the container loading problem. Eur. J. Oper. Res. 2002, 141, 382–392. [Google Scholar] [CrossRef]
- He, K.; Huang, W. An efficient placement heuristic for three-dimensional rectangular packing. Comput. Oper. Res. 2011, 38, 227–233. [Google Scholar] [CrossRef]
- Raidl, G.R. Decomposition based hybrid metaheuristics. Eur. J. Oper. Res. 2015, 244, 66–76. [Google Scholar] [CrossRef]
- Blum, C.; Raidl, G.R. Hybrid Metaheuristics: Powerful Tools for Optimization; Springer: Berlin, Germany, 2016. [Google Scholar]
- Boschetti, M.; Maniezzo, V.; Roffilli, M.; Bolufé Röhler, A. Matheuristics: Optimization, Simulation and Control. In Hybrid Metaheuristics; Blesa, M., Blum, C., Di Gaspero, L., Roli, A., Sampels, M., Schaerf, A., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2009; Volume 5818, pp. 171–177. [Google Scholar]
- Haessler, R.W.; Brian Talbot, F. Load planning for shipments of low density products. Eur. J. Oper. Res. 1990, 44, 289–299. [Google Scholar] [CrossRef]
- Nepomuceno, N.; Pinheiro, P.; Coelho, A.L. Tackling the Container Loading Problem: A Hybrid Approach Based on Integer Linear Programming and Genetic Algorithms. In Evolutionary Computation in Combinatorial Optimization; Cotta, C., van Hemert, J., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2007; Volume Voume 4446, pp. 154–165. [Google Scholar]
- Nepomuceno, N.; Pinheiro, P.; Coelho, A.L. A Hybrid Optimization Framework for Cutting and Packing Problems. In Recent Advances in Evolutionary Computation for Combinatorial Optimization; Cotta, C., van Hemert, J., Eds.; Studies in Computational Intelligence; Springer: Berlin, Germany, 2008; Volume 153, pp. 87–99. [Google Scholar]
- Saraiva, R.; Nepomuceno, N.; Pinheiro, P. The Generate-and-Solve Framework Revisited: Generating by Simulated Annealing. In Evolutionary Computation in Combinatorial Optimization; Middendorf, M., Blum, C., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2013; Volume 7832, pp. 262–273. [Google Scholar]
- Wang, N.; Lim, A.; Zhu, W. A multi-round partial beam search approach for the single container loading problem with shipment priority. Int. J. Prod. Econ. 2013, 145, 531–540. [Google Scholar] [CrossRef]
- Beasley, J. An exact two-dimensional non-guillotine cutting tree search procedure. Oper. Res. 1985, 33, 49–64. [Google Scholar] [CrossRef]
- Blum, C.; Raidl, G.R. Hybridization Based on Problem Instance Reduction. In Hybrid Metaheuristics: Powerful Tools for Optimization; Springer: Cham, Switzerland, 2016; pp. 45–62. [Google Scholar] [CrossRef]
- Pinheiro, P.R.; Coelho, A.L.V.; de Aguiar, A.B.; Bonates, T.O. On the concept of density control and its application to a hybrid optimization framework: Investigation into cutting problems. Comput. Ind. Eng. 2011, 61, 463–472. [Google Scholar] [CrossRef]
- Blum, C.; Pinacho, P.; López-Ibáñez, M.; Lozano, J.A. Construct, Merge, Solve & Adapt: A new general algorithm for combinatorial optimization. Comput. Oper. Res. 2016, 68, 75–88. [Google Scholar] [CrossRef]
- Çağatay Iris; Pacino, D.; Ropke, S.; Larsen, A. Integrated Berth Allocation and Quay Crane Assignment Problem: Set partitioning models and computational results. Transp. Res. Part E Logist. Transp. Rev. 2015, 81, 75–97. [Google Scholar] [CrossRef]
- Bean, J.C. Genetic algorithms and random keys for sequencing and optimization. ORSA J. Comput. 1994, 6, 154–160. [Google Scholar] [CrossRef]
- Spears, W.M.; De Jong, K.A. On the virtues of parameterized uniform crossover. In Proceedings of the Fourth International Conference on Genetic Algorithms, San Diego, CA, USA, 13–16 July 1991; pp. 230–236. [Google Scholar]
- Beasley, J.E. OR-Library: Distributing test problems by electronic mail. J. Oper. Res. Soc. 1990, 1069–1072. [Google Scholar] [CrossRef]
- Araya, I.; Guerrero, K.; Nuñez, E. VCS: A new heuristic function for selecting boxes in the single container loading problem. Comput. Oper. Res. 2017, 82, 27–35. [Google Scholar] [CrossRef]
- Liu, S.; Tan, W.; Xu, Z.; Liu, X. A tree search algorithm for the container loading problem. Comput. Ind. Eng. 2014, 75, 20–30. [Google Scholar] [CrossRef]
- Tian, T.; Zhu, W.; Lim, A.; Wei, L. The multiple container loading problem with preference. Eur. J. Oper. Res. 2016, 248, 84–94. [Google Scholar] [CrossRef]
- Çağatay, I.; Christensen, J.; Pacino, D.; Ropke, S. Flexible ship loading problem with transfer vehicle assignment and scheduling. Transp. Res. Part B Methodol. 2018, 111, 113–134. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | CLTRS [4] | ID-GLTS [7] | BSG-VCS [36] | BLHM | |
|---|---|---|---|---|---|
| Avg | Best* | ||||
| BR1-001 | 93.83 | 93.80 | 93.53 | 95.12 | 95.83 * |
| BR1-002 | 95.45 | 94.94 | 96.01 | 95.24 | 97.67 * |
| BR1-003 | 91.03 | 91.03 | 91.03 | 92.11 | 92.67 * |
| BR1-004 | 91.84 | 91.84 | 91.84 | 94.55 | 95.26 * |
| BR1-005 | 95.14 | 95.14 | 95.14 | 93.85 | 94.63 |
| BR1-006 | 95.72 | 94.63 | 96.02 | 93.20 | 93.49 |
| BR1-007 | 94.14 | 93.57 | 94.03 | 93.74 | 94.60 * |
| BR1-008 | 97.05 | 97.05 | 97.18 | 93.88 | 94.53 |
| BR1-009 | 91.57 | 90.62 | 91.87 | 87.61 | 87.61 |
| BR1-010 | 94.81 | 94.67 | 94.81 | 93.10 | 93.20 |
| BR1-011 | 91.49 | 91.84 | 92.54 | 90.37 | 91.11 |
| BR1-012 | 94.08 | 93.67 | 93.67 | 91.45 | 91.95 |
| BR1-013 | 97.14 | 97.43 | 97.60 | 95.34 | 95.58 |
| BR1-014 | 94.37 | 94.63 | 94.70 | 91.30 | 91.68 |
| BR1-015 | 95.38 | 96.74 | 96.96 | 92.84 | 93.29 |
| BR1-016 | 95.75 | 95.55 | 96.20 | 93.14 | 94.21 |
| BR1-017 | 97.80 | 97.29 | 97.97 | 96.21 | 96.40 |
| BR1-018 | 88.49 | 88.49 | 88.49 | 88.95 | 89.57 * |
| BR1-019 | 94.73 | 94.73 | 95.13 | 94.40 | 94.81 |
| BR1-020 | 94.20 | 95.23 | 94.30 | 91.53 | 92.46 |
| BR1-021 | 94.69 | 93.77 | 94.69 | 93.47 | 93.48 |
| BR1-022 | 95.34 | 94.46 | 94.73 | 92.58 | 93.89 |
| BR1-023 | 94.15 | 94.67 | 94.69 | 96.53 | 96.54 * |
| BR1-024 | 90.75 | 91.18 | 91.42 | 91.51 | 91.63 * |
| BR1-025 | 94.83 | 95.25 | 95.17 | 93.27 | 94.26 |
| BR1-026 | 93.81 | 93.81 | 93.81 | 93.17 | 93.67 |
| BR1-027 | 91.67 | 91.95 | 92.54 | 93.60 | 93.60 * |
| BR1-028 | 93.84 | 93.46 | 94.73 | 91.46 | 92.53 |
| BR1-029 | 93.95 | 93.92 | 94.45 | 93.52 | 94.45 * |
| BR1-030 | 97.54 | 97.13 | 98.09 | 94.43 | 95.08 |
| BR1-031 | 95.54 | 94.65 | 95.67 | 92.84 | 93.32 |
| BR1-032 | 97.01 | 97.01 | 97.01 | 94.84 | 95.07 |
| BR1-033 | 97.63 | 97.55 | 97.75 | 94.17 | 94.88 |
| BR1-034 | 94.62 | 94.62 | 95.47 | 92.66 | 92.87 |
| BR1-035 | 93.60 | 94.05 | 94.14 | 91.74 | 92.30 |
| BR1-036 | 95.47 | 95.36 | 94.68 | 94.05 | 94.51 |
| BR1-037 | 95.16 | 94.97 | 95.42 | 92.65 | 93.16 |
| BR1-038 | 90.64 | 90.11 | 90.71 | 90.92 | 91.30 * |
| BR1-039 | 96.40 | 96.48 | 96.48 | 94.07 | 94.19 |
| BR1-040 | 94.52 | 93.96 | 93.98 | 92.96 | 93.53 |
| BR1-041 | 94.55 | 94.97 | 95.39 | 93.89 | 94.55 |
| BR1-042 | 94.24 | 94.86 | 95.29 | 93.47 | 94.37 |
| BR1-043 | 95.61 | 95.75 | 96.18 | 83.98 | 86.02 |
| BR1-044 | 87.97 | 88.21 | 88.21 | 83.97 | 84.03 |
| BR1-045 | 96.38 | 96.23 | 96.38 | 93.76 | 94.12 |
| BR1-046 | 94.13 | 94.13 | 94.13 | 90.80 | 91.27 |
| BR1-047 | 95.39 | 96.16 | 96.29 | 92.83 | 93.56 |
| BR1-048 | 95.95 | 95.45 | 95.45 | 94.93 | 95.65 |
| BR1-049 | 95.03 | 94.29 | 94.77 | 92.61 | 94.10 |
| BR1-050 | 97.55 | 97.76 | 98.16 | 94.45 | 95.56 |
| Instance | CLTRS [4] | ID-GLTS [7] | BSG-VCS [36] | BLHM | |
|---|---|---|---|---|---|
| Avg | Best* | ||||
| BR1-051 | 97.11 | 97.11 | 97.08 | 95.12 | 95.87 |
| BR1-052 | 94.73 | 94.60 | 94.73 | 95.78 | 95.81 * |
| BR1-053 | 89.59 | 89.59 | 91.65 | 93.03 | 93.70 * |
| BR1-054 | 92.37 | 92.54 | 93.05 | 93.05 | 93.33 * |
| BR1-055 | 90.62 | 90.62 | 90.62 | 87.64 | 87.64 |
| BR1-056 | 97.26 | 96.14 | 97.32 | 95.71 | 96.68 |
| BR1-057 | 95.60 | 95.48 | 96.22 | 94.24 | 95.49 |
| BR1-058 | 94.45 | 92.61 | 93.94 | 94.17 | 94.68 * |
| BR1-059 | 97.57 | 96.76 | 96.38 | 95.99 | 97.16 |
| BR1-060 | 95.86 | 95.86 | 95.96 | 93.61 | 94.88 |
| BR1-061 | 95.90 | 95.90 | 95.97 | 91.67 | 93.69 |
| BR1-062 | 93.07 | 92.96 | 94.20 | 92.16 | 92.76 |
| BR1-063 | 91.76 | 93.15 | 93.05 | 92.30 | 93.66 * |
| BR1-064 | 94.59 | 94.24 | 95.44 | 91.49 | 91.83 |
| BR1-065 | 97.71 | 97.87 | 97.87 | 95.63 | 96.78 |
| BR1-066 | 96.16 | 95.39 | 96.20 | 94.92 | 95.81 |
| BR1-067 | 95.92 | 95.72 | 96.06 | 92.96 | 93.50 |
| BR1-068 | 97.06 | 96.81 | 97.06 | 94.82 | 95.23 |
| BR1-069 | 92.93 | 91.37 | 92.38 | 91.48 | 92.65 |
| BR1-070 | 91.35 | 91.35 | 90.71 | 94.94 | 95.19 * |
| BR1-071 | 92.98 | 91.97 | 93.14 | 93.36 | 93.57 * |
| BR1-072 | 92.43 | 92.72 | 92.52 | 93.12 | 93.60 * |
| BR1-073 | 91.71 | 91.67 | 91.66 | 93.53 | 94.52 * |
| BR1-074 | 94.43 | 94.68 | 94.98 | 91.33 | 92.57 |
| BR1-075 | 93.66 | 94.55 | 94.55 | 93.13 | 93.13 |
| BR1-076 | 96.56 | 96.59 | 96.67 | 95.47 | 96.30 |
| BR1-077 | 97.26 | 97.26 | 97.26 | 93.80 | 94.84 |
| BR1-078 | 93.84 | 93.95 | 94.67 | 93.22 | 93.29 |
| BR1-079 | 94.82 | 94.82 | 94.82 | 94.88 | 95.40 * |
| BR1-080 | 95.91 | 96.36 | 96.65 | 95.11 | 95.11 |
| BR1-081 | 92.77 | 92.44 | 92.44 | 91.16 | 92.30 |
| BR1-082 | 93.74 | 93.83 | 94.39 | 91.75 | 93.17 |
| BR1-083 | 95.83 | 95.83 | 95.83 | 92.72 | 94.57 |
| BR1-084 | 93.84 | 94.15 | 94.40 | 93.47 | 94.51 * |
| BR1-085 | 97.99 | 97.55 | 98.03 | 95.50 | 95.80 |
| BR1-086 | 96.14 | 95.11 | 95.11 | 94.15 | 94.81 |
| BR1-087 | 93.76 | 93.38 | 93.76 | 89.49 | 91.12 |
| BR1-088 | 94.29 | 93.19 | 94.54 | 90.20 | 91.40 |
| BR1-089 | 88.21 | 88.21 | 88.21 | 93.17 | 94.24 * |
| BR1-090 | 92.82 | 92.52 | 92.82 | 88.96 | 89.46 |
| BR1-091 | 97.09 | 97.14 | 97.14 | 95.17 | 95.52 |
| BR1-092 | 93.10 | 90.88 | 92.71 | 92.80 | 93.27 * |
| BR1-093 | 95.91 | 95.90 | 95.67 | 93.12 | 94.17 |
| BR1-094 | 95.44 | 95.97 | 95.97 | 93.39 | 95.08 |
| BR1-095 | 95.20 | 95.92 | 95.70 | 92.90 | 92.90 |
| BR1-096 | 95.79 | 95.79 | 95.79 | 93.28 | 94.22 |
| BR1-097 | 94.87 | 93.78 | 94.87 | 93.90 | 94.41 |
| BR1-098 | 96.14 | 96.69 | 96.69 | 93.96 | 94.87 |
| BR1-099 | 93.82 | 94.16 | 94.48 | 89.16 | 90.39 |
| BR1-100 | 96.62 | 98.16 | 98.16 | 94.04 | 94.68 |
| Instance | CLTRS [4] | ID-GLTS [7] | BSG-VCS [36] | BLHM | |
|---|---|---|---|---|---|
| Avg | Best* | ||||
| BR2-001 | 95.50 | 95.55 | 95.98 | 91.85 | 92.71 |
| BR2-002 | 95.50 | 95.22 | 95.11 | 93.40 | 93.74 |
| BR2-003 | 94.14 | 95.52 | 95.42 | 89.91 | 91.63 |
| BR2-004 | 93.68 | 93.39 | 94.23 | 93.91 | 95.16 * |
| BR2-005 | 95.89 | 96.24 | 96.24 | 92.13 | 93.77 |
| BR2-006 | 96.33 | 96.24 | 96.65 | 91.40 | 93.27 |
| BR2-007 | 96.19 | 95.70 | 96.70 | 93.13 | 94.18 |
| BR2-008 | 94.12 | 94.14 | 94.20 | 91.39 | 91.63 |
| BR2-009 | 95.23 | 94.39 | 95.00 | 91.34 | 92.12 |
| BR2-010 | 96.69 | 96.15 | 96.33 | 94.30 | 95.25 |
| BR2-011 | 93.34 | 94.02 | 95.21 | 90.24 | 91.69 |
| BR2-012 | 93.75 | 94.56 | 94.85 | 91.12 | 92.00 |
| BR2-013 | 95.75 | 96.58 | 96.71 | 92.88 | 94.64 |
| BR2-014 | 94.11 | 94.18 | 94.60 | 92.67 | 93.88 |
| BR2-015 | 95.85 | 96.00 | 96.16 | 91.80 | 93.68 |
| BR2-016 | 94.21 | 94.88 | 95.79 | 92.47 | 93.05 |
| BR2-017 | 96.07 | 95.88 | 95.93 | 91.68 | 92.85 |
| BR2-018 | 92.74 | 93.49 | 94.70 | 90.37 | 91.44 |
| BR2-019 | 95.07 | 95.73 | 95.60 | 91.94 | 93.55 |
| BR2-020 | 94.36 | 94.77 | 94.42 | 91.92 | 93.48 |
| BR2-021 | 93.36 | 93.68 | 95.41 | 91.87 | 93.05 |
| BR2-022 | 93.76 | 93.98 | 94.81 | 90.23 | 91.32 |
| BR2-023 | 91.01 | 90.43 | 90.98 | 92.48 | 92.68 * |
| BR2-024 | 92.28 | 92.46 | 92.55 | 91.13 | 92.34 |
| BR2-025 | 95.60 | 95.24 | 96.34 | 91.87 | 92.86 |
| BR2-026 | 95.19 | 95.09 | 95.38 | 92.55 | 93.73 |
| BR2-027 | 93.34 | 93.24 | 93.95 | 92.31 | 92.90 |
| BR2-028 | 93.74 | 93.82 | 94.52 | 91.85 | 93.17 |
| BR2-029 | 96.67 | 96.04 | 97.02 | 96.62 | 97.02 * |
| BR2-030 | 97.33 | 97.59 | 97.94 | 94.22 | 94.35 |
| BR2-031 | 95.75 | 94.74 | 96.28 | 90.66 | 92.26 |
| BR2-032 | 95.72 | 95.61 | 96.45 | 92.63 | 93.39 |
| BR2-033 | 96.04 | 96.14 | 95.87 | 93.95 | 94.31 |
| BR2-034 | 95.83 | 95.10 | 95.43 | 92.78 | 93.86 |
| BR2-035 | 95.46 | 95.76 | 95.74 | 91.98 | 92.41 |
| BR2-036 | 95.27 | 95.47 | 95.29 | 93.92 | 94.44 |
| BR2-037 | 94.45 | 94.41 | 95.79 | 92.14 | 93.32 |
| BR2-038 | 93.82 | 94.67 | 94.67 | 90.45 | 91.16 |
| BR2-039 | 95.79 | 96.64 | 97.25 | 94.75 | 95.47 |
| BR2-040 | 93.06 | 93.31 | 94.07 | 91.05 | 92.19 |
| BR2-041 | 94.14 | 94.14 | 93.83 | 93.01 | 93.45 |
| BR2-042 | 95.20 | 95.10 | 95.56 | 92.88 | 94.06 |
| BR2-043 | 94.00 | 94.44 | 94.44 | 90.33 | 90.77 |
| BR2-044 | 90.14 | 90.70 | 92.33 | 89.38 | 89.38 |
| BR2-045 | 95.10 | 95.43 | 95.59 | 92.76 | 93.84 |
| BR2-046 | 93.61 | 93.67 | 94.12 | 93.07 | 93.57 |
| BR2-047 | 95.76 | 95.96 | 96.03 | 93.51 | 93.88 |
| BR2-048 | 96.18 | 96.87 | 97.35 | 94.06 | 94.94 |
| BR2-049 | 95.99 | 95.94 | 96.03 | 94.35 | 94.41 |
| BR2-050 | 97.03 | 97.04 | 97.58 | 93.85 | 94.68 |
| Instance | CLTRS [4] | ID-GLTS [7] | BSG-VCS [36] | BLHM | |
|---|---|---|---|---|---|
| Avg | Best* | ||||
| BR2-051 | 96.47 | 96.17 | 96.56 | 94.37 | 95.11 |
| BR2-052 | 95.30 | 95.76 | 95.31 | 93.89 | 94.31 |
| BR2-053 | 92.27 | 93.18 | 94.06 | 93.71 | 94.06 * |
| BR2-054 | 94.38 | 94.90 | 95.31 | 90.77 | 91.81 |
| BR2-055 | 93.03 | 93.60 | 94.33 | 90.92 | 91.55 |
| BR2-056 | 96.26 | 96.26 | 96.84 | 93.05 | 93.87 |
| BR2-057 | 96.46 | 96.41 | 97.14 | 92.09 | 93.28 |
| BR2-058 | 94.97 | 94.11 | 94.97 | 93.86 | 94.58 |
| BR2-059 | 96.63 | 97.13 | 96.72 | 94.60 | 95.86 |
| BR2-060 | 95.64 | 94.62 | 95.64 | 92.03 | 92.35 |
| BR2-061 | 93.03 | 94.80 | 94.80 | 90.51 | 91.77 |
| BR2-062 | 95.81 | 95.77 | 96.15 | 90.74 | 91.31 |
| BR2-063 | 93.80 | 92.84 | 93.54 | 91.43 | 92.99 |
| BR2-064 | 94.74 | 93.11 | 93.60 | 91.71 | 92.17 |
| BR2-065 | 94.78 | 95.39 | 96.17 | 93.90 | 94.00 |
| BR2-066 | 95.07 | 95.61 | 96.62 | 92.88 | 93.70 |
| BR2-067 | 96.04 | 95.67 | 96.84 | 92.41 | 93.50 |
| BR2-068 | 93.78 | 93.78 | 95.06 | 93.35 | 93.78 |
| BR2-069 | 91.13 | 91.72 | 92.34 | 92.50 | 93.01 * |
| BR2-070 | 93.24 | 92.21 | 94.32 | 91.76 | 92.75 |
| BR2-071 | 95.17 | 95.37 | 96.04 | 93.71 | 94.71 |
| BR2-072 | 92.12 | 92.82 | 93.31 | 91.56 | 92.72 |
| BR2-073 | 93.42 | 93.25 | 94.44 | 92.57 | 93.68 |
| BR2-074 | 94.03 | 94.18 | 95.31 | 91.22 | 92.53 |
| BR2-075 | 94.87 | 95.16 | 95.47 | 92.60 | 93.71 |
| BR2-076 | 96.64 | 96.00 | 97.05 | 94.38 | 95.58 |
| BR2-077 | 95.18 | 96.13 | 96.58 | 94.25 | 95.04 |
| BR2-078 | 95.22 | 95.17 | 95.94 | 92.69 | 93.78 |
| BR2-079 | 96.46 | 96.24 | 96.98 | 94.14 | 94.53 |
| BR2-080 | 93.33 | 94.10 | 94.34 | 92.82 | 93.99 |
| BR2-081 | 92.68 | 93.70 | 93.67 | 92.72 | 93.28 |
| BR2-082 | 94.50 | 94.41 | 95.11 | 91.96 | 92.80 |
| BR2-083 | 96.45 | 95.83 | 96.61 | 93.11 | 93.87 |
| BR2-084 | 92.77 | 92.27 | 93.26 | 92.82 | 93.98 * |
| BR2-085 | 96.85 | 96.90 | 97.24 | 95.21 | 95.61 |
| BR2-086 | 94.75 | 95.29 | 95.83 | 93.13 | 94.27 |
| BR2-087 | 93.76 | 94.23 | 94.84 | 90.57 | 91.18 |
| BR2-088 | 92.34 | 92.99 | 93.64 | 92.12 | 93.62 |
| BR2-089 | 89.58 | 89.96 | 90.57 | 92.58 | 93.04 * |
| BR2-090 | 94.55 | 95.04 | 95.04 | 91.68 | 92.17 |
| BR2-091 | 94.53 | 95.16 | 95.64 | 92.89 | 94.10 |
| BR2-092 | 93.96 | 93.79 | 94.30 | 91.80 | 92.25 |
| BR2-093 | 95.35 | 95.35 | 95.35 | 93.38 | 94.88 |
| BR2-094 | 97.11 | 96.66 | 97.42 | 93.75 | 94.36 |
| BR2-095 | 94.98 | 95.84 | 95.85 | 94.00 | 94.00 |
| BR2-096 | 96.83 | 97.04 | 98.27 | 92.56 | 93.27 |
| BR2-097 | 95.53 | 94.64 | 95.01 | 92.78 | 93.92 |
| BR2-098 | 96.38 | 96.58 | 97.31 | 92.92 | 93.74 |
| BR2-099 | 96.84 | 96.83 | 97.33 | 93.56 | 95.08 |
| BR2-100 | 95.17 | 95.66 | 95.57 | 91.51 | 95.23 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dias Saraiva, R.; Nepomuceno, N.; Rogério Pinheiro, P. A Two-Phase Approach for Single Container Loading with Weakly Heterogeneous Boxes. Algorithms 2019, 12, 67. https://doi.org/10.3390/a12040067
Dias Saraiva R, Nepomuceno N, Rogério Pinheiro P. A Two-Phase Approach for Single Container Loading with Weakly Heterogeneous Boxes. Algorithms. 2019; 12(4):67. https://doi.org/10.3390/a12040067
Chicago/Turabian StyleDias Saraiva, Rommel, Napoleão Nepomuceno, and Plácido Rogério Pinheiro. 2019. "A Two-Phase Approach for Single Container Loading with Weakly Heterogeneous Boxes" Algorithms 12, no. 4: 67. https://doi.org/10.3390/a12040067
APA StyleDias Saraiva, R., Nepomuceno, N., & Rogério Pinheiro, P. (2019). A Two-Phase Approach for Single Container Loading with Weakly Heterogeneous Boxes. Algorithms, 12(4), 67. https://doi.org/10.3390/a12040067