
A New Fractional-Order Constitutive Model and Rough Design Method for Fluid-Type Inerters


Abstract
1. Introduction
2. Preparation Knowledge
2.1. Definition and Properties of Fractional Calculus
- (1)
- Set λ, μ∈ℝ, and 0 < α, β < 1, then we obtainwhere the functions x(t) and g(t) and their derivatives are continuous in the interval .
- (2)
- Given the time scale τ = ωt and the function x(t) = z(τ), we obtain
- (3)
- If x(t) is a trigonometric function and 0 < α < 1, then we obtain
2.2. The Traditional Models of Fluid-Type Inerters
3. Fractional-Order Inerter Model (FOIM)
3.1. The Proposal of an FOIM
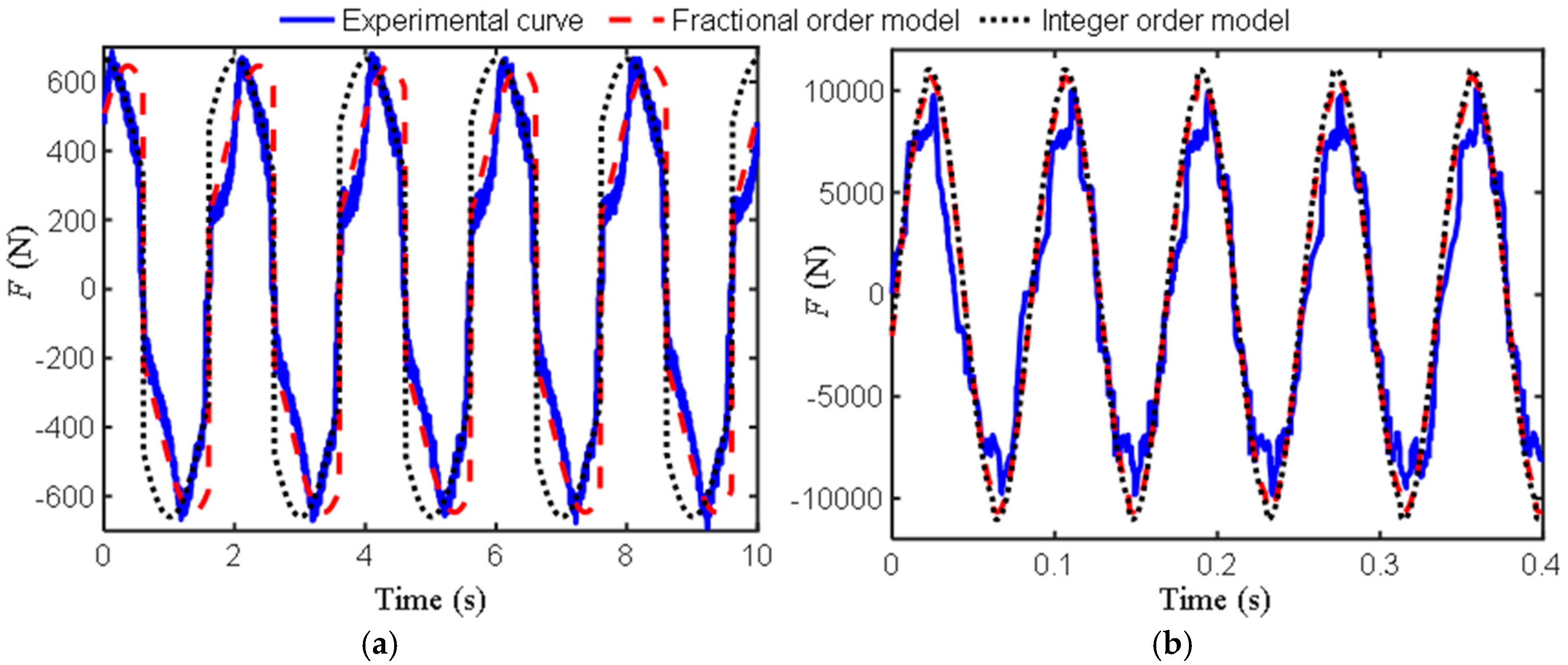
3.2. Model Identification and Validation
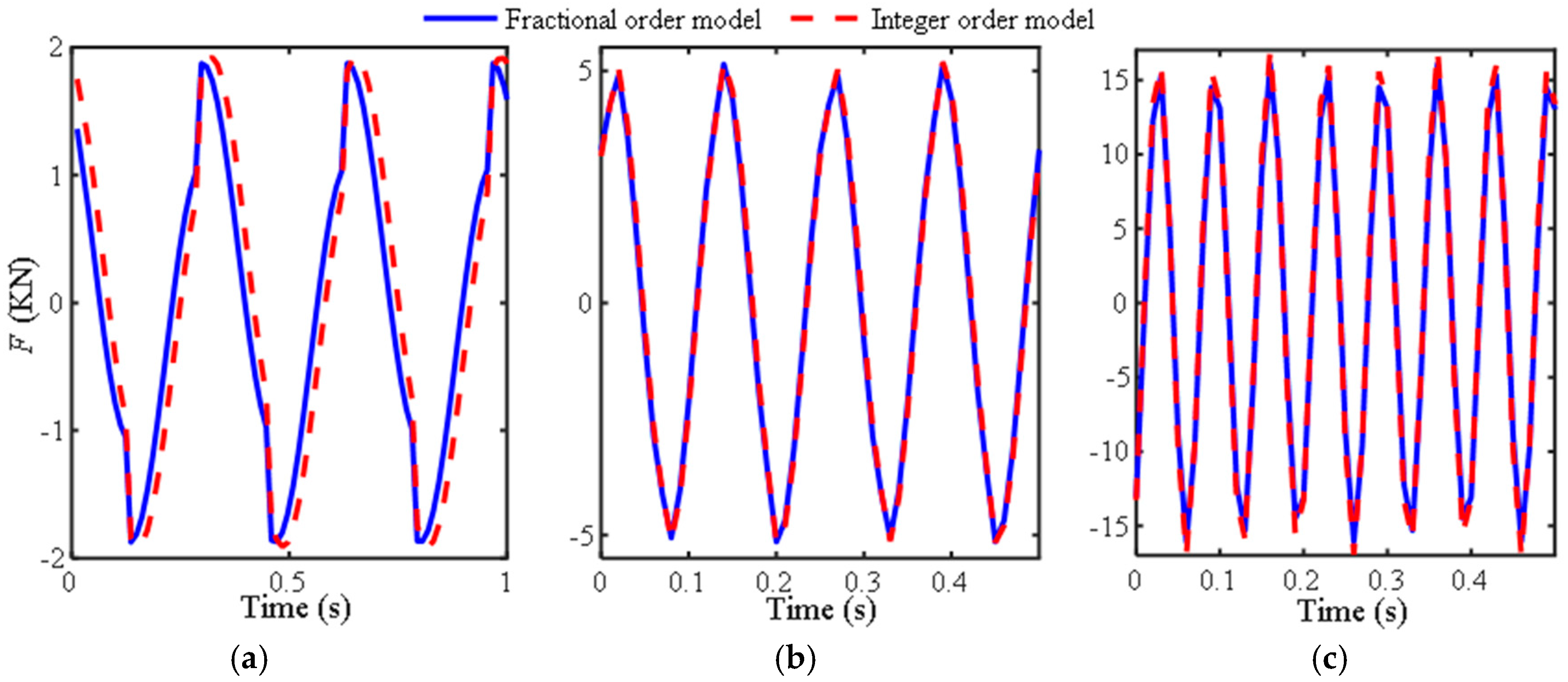
3.3. Segmented Fractional-Order Inerter Model (SFOIM)
4. Conclusions
- (1)
- Research has shown that when using segmented fractional-order models for fluid inerters, the fitting accuracy in the ultra-low frequency region is better than that of independent fractional-order models. However, this high precision comes at the cost of increasing model complexity. This suggests that we need to balance the relationship between accuracy and model complexity in practical applications.
- (2)
- Research has found that when the critical frequency is small enough, the use of an independent fractional-order model for fluid inerters can meet practical engineering needs. Equation (16) can serve as a rough design principle for fluid inertial containers, providing a simple and effective reference for engineering design.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Smith, M.C. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef]
- Papageorgiou, C.; Houghton, N.E.; Smith, M.C. Experimental Testing and Analysis of Inerter Devices. J. Dyn. Syst. Meas. Control 2009, 131, 101–116. [Google Scholar] [CrossRef]
- Swift, S.J.; Smith, M.C.; Glover, A.R.; Papageorgiou, C.; Gartner, B.; Houghton, N.E. Design and modelling of a fluid inerter. Int. J. Control 2013, 86, 2035–2051. [Google Scholar] [CrossRef]
- Shen, Y.J.; Chen, L.; Liu, Y.L.; Zhang, X.; Yang, X. Optimized modeling and experiment test of a fluid inerter. J. Vibroeng. 2016, 18, 2789–2800. [Google Scholar] [CrossRef]
- Shen, Y.J.; Shi, D.H.; Chen, L.; Liu, Y.L.; Yang, X.F. Modeling and experimental tests of hydraulic electric inerter. Sci. China Technol. Sci. 2019, 62, 2161–2169. [Google Scholar] [CrossRef]
- Zhang, X.; Cheng, X.; Liu, J.; Yang, J.; Nie, J. Load Adaptivity of Seat Suspensions Equipped with Diamond-Shaped Structure Mem-Inerter. J. Vib. Eng. Technol. 2024, 12, 8707–8724. [Google Scholar] [CrossRef]
- Yang, L.; Wang, R.C.; Meng, X.P.; Sun, Z.Y.; Liu, W.; Wang, Y. Performance analysis of a new hydropneumatic inerter-based suspension system with semi-active control effect. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1883–1896. [Google Scholar] [CrossRef]
- Liu, X.F.; Jiang, J.Z.; Titurus, B.; Harrison, A.J.L.; Mcbryde, D. Testing and modelling of the damping effects for fluid-based inerters. Procedia Eng. 2017, 199, 435–440. [Google Scholar] [CrossRef]
- Liu, X.F.; Jiang, J.S.Z.; Titurus, B.; Harrison, A. Model identification methodology for fluid-based inerters. Mech. Syst. Signal Process. 2018, 106, 479–494. [Google Scholar] [CrossRef]
- De Domenico, D.; Deastra, P.; Ricciardi, G.; Sims, N.D.; Wagg, D.J. Novel fluid inerter based tuned mass dampers for optimised structural control of base-isolated buildings. J. Frankl. Inst. 2019, 356, 7626–7649. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G.; Zhang, R.F. Optimal design and seismic performance of tuned fluid inerter applied to structures with friction pendulum isolators. Soil Dyn. Earthq. Eng. 2020, 132, 106099. [Google Scholar] [CrossRef]
- Shen, Y.J.; Chen, L.; Liu, Y.L.; Zhang, X.L. Modeling and Optimization of Vehicle Suspension Employing a Nonlinear Fluid Inerter. Shock. Vib. 2016, 2016, 1–9. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Wu, Y. The uniqueness of positive solution for a fractional order model of turbulent flow in a porous medium. Appl. Math. Lett. 2014, 37, 26–33. [Google Scholar] [CrossRef]
- Chen, W. Fractional Derivative Modeling of Mechanics and Engineering Problems; Science Press: Beijing, China, 2010. [Google Scholar]
- Westerlund, S.; Ekstam, L. Capacitor theory. IEEE Trans. Dielectr. Electr. Insul. 1994, 1, 826–839. [Google Scholar] [CrossRef]
- Chen, Y.D.; Xu, J.; Tai, Y.P.; Xu, X.; Chen, N. Critical damping design method of vibration isolation system with both fractional-order inerter and damper. Mech. Adv. Mater. Struct. 2022, 29, 1348–1359. [Google Scholar] [CrossRef]
- Chen, Y.; Tai, Y.; Xu, J.; Xu, X.; Chen, N. Vibration Analysis of a 1-DOF System Coupled with a Nonlinear Energy Sink with a Fractional Order Inerter. Sensors 2022, 22, 6408. [Google Scholar] [CrossRef]
- Yang, J.; Liu, L.; Chen, S.; Feng, L.; Xie, C. Fractional Second-Grade Fluid Flow over a Semi-Infinite Plate by Constructing the Absorbing Boundary Condition. Fractal Fract. 2024, 8, 309. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Xu, J.; Chen, Y.D.; Tai, Y.P.; Xu, X.M.; Shi, G.D.; Chen, N. Vibration analysis of complex fractional viscoelastic beam structures by the wave method. Int. J. Mech. Sci. 2020, 167, 105204. [Google Scholar] [CrossRef]
- Shen, Y.J.; Chen, L.; Liu, Y.L.; Zhang, X.L. Influence of fluid inerter nonlinearities on vehicle suspension performance. Adv. Mech. Eng. 2017, 9, 1–9. [Google Scholar] [CrossRef]
- Wang, Z.H.; Hu, H.Y. Stability of a linear oscillator with damping force of the fractional-order derivative. Sci. China Phys. Mech. Astron. 2010, 53, 345–352. [Google Scholar] [CrossRef]
- Benson, D.A. The Fractional Advection-Dispersion Equation: Development and Application. Ph.D. Thesis, University of Nevada, Reno, NV, USA, 1998. [Google Scholar]
- Cao, Y.; Chen, W.; Ma, H.; Li, H.; Wang, B.; Tan, L.; Wang, X.; Han, Q. Dynamic modeling and experimental verification of clamp–pipeline system with soft nonlinearity. Nonlinear Dyn. 2023, 111, 17725–17748. [Google Scholar] [CrossRef]
- Wang, L.; Mao, M.; Lei, Q.; Chen, Y.; Zhang, X. Modeling and testing for a hydraulic inerter. J. Vib. Shock 2018, 37, 146–152. [Google Scholar]
- Dean, W.R. Fluid Motion in a Curved Channel. Proc. R. Soc. London. Ser. A 1928, 121, 402–420. [Google Scholar]
- Rodman, S.; Trenc, F. Pressure drop of laminar oil-flow in curved rectangular channels. Exp. Therm. Fluid Sci. 2002, 26, 25–32. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value Name | Value [12] | Value [10] |
|---|---|---|
| Radius of the piston r1 (m) | 0.012 | 0.014 |
| Inner radius of the cylinder r2 (m) | 0.028 | 0.025 |
| Inner radius of the helical channel r3 (m) | 0.005 | 0.006 |
| Radius of the helix r4 (m) | 0.1 | 0.12 |
| Pitch of the helix h (m) | 0.012 | 0.03 |
| Clearance between the piston head and the cylinder wall Δr (mm) | 0 | 0.1 |
| Circle number of helical channel nt | 14 | 7 |
| Oil density ρ (kg∙m−3) | 800 | 802 |
| Length of transition section l0 (m) | 0.1 | 0 |
| Viscosity of fluid μ (Pa∙s) | 0.027 | 0.00168 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Chen, N. A New Fractional-Order Constitutive Model and Rough Design Method for Fluid-Type Inerters. Materials 2025, 18, 2556. https://doi.org/10.3390/ma18112556
Chen Y, Chen N. A New Fractional-Order Constitutive Model and Rough Design Method for Fluid-Type Inerters. Materials. 2025; 18(11):2556. https://doi.org/10.3390/ma18112556
Chicago/Turabian StyleChen, Yandong, and Ning Chen. 2025. "A New Fractional-Order Constitutive Model and Rough Design Method for Fluid-Type Inerters" Materials 18, no. 11: 2556. https://doi.org/10.3390/ma18112556
APA StyleChen, Y., & Chen, N. (2025). A New Fractional-Order Constitutive Model and Rough Design Method for Fluid-Type Inerters. Materials, 18(11), 2556. https://doi.org/10.3390/ma18112556