Abstract
The number of distinct components of a high-order material/physical tensor might be remarkably reduced if it has certain symmetry types due to the crystal structure of materials. An nth-order tensor could be decomposed into a direct sum of deviators where the order is not higher than n, then the symmetry classification of even-type deviators is the basis of the symmetry problem for arbitrary even-order physical tensors. Clearly, an nth-order deviator can be expressed as the traceless symmetric part of tensor product of n unit vectors multiplied by a positive scalar from Maxwell’s multipole representation. The set of these unit vectors shows the multipole structure of the deviator. Based on two steps of exclusion, the symmetry classifications of all even-type deviators are obtained by analyzing the geometric symmetry of the unit vector sets, and the general results are provided. Moreover, corresponding to each symmetry type of the even-type deviators up to sixth-order, the specific multipole structure of the unit vector set is given. This could help to identify the symmetry types of an unknown physical tensor and possible back-calculation of the involved physical coefficients.
1. Introduction
1.1. Nomenclature
Without additional indication, vectors and tensors are always supposed to be three dimensional and denoted by bold letters. The summation convention for repeated indices is implicit. The meanings of the main symbols used in this paper are shown in Table 1.

Table 1.
The meaning of symbols in this paper.
1.2. Material Symmetry and Physical Motivation
The physical properties of material exhibit orientation related anisotropy at a random point inside. However, the physical properties in some special orientations could be the same due to the symmetry of crystal structure at the micro-perspective. In the continuum mechanics, high-order tensors are used to describe the physical properties of materials, which are usually referred to as the physical tensors or constitutive tensors (for example, the elasticity tensor, the photo-elasticity tensor, the flexoelectric tensor and the sixth-order elasticity tensor involved in the theory of first strain gradient elasticity [1]). These higher-order tensors are difficult to handle, and the specific physical meanings of their components are not clear and simple. It is well known that the space expanded by these physical tensors can be divided into subspaces with equivalent symmetry classes. Two tensors in a same subspace are equivalences by sharing the same type of material symmetry, or through obtaining the symmetry point groups conjugate to each other. For example, the components of the stress and strain tensors are and respectively, in relation to the orthonormal basis. Hooke’s law takes the form below:
where represents the components of the fourth-order elasticity tensor C. Here and after, the lower cases of Latin subscripts take the values of 1, 2 and 3. The material symmetry of an elastic body is exhibited in the collection of all orthogonal tensors, which are symmetry transformations of the tensor C. The symmetry point group is defined as
Notably, represents the orthogonal tensor (Such as , for all pairs of vectors). The maximum group of the orthogonal tensors is O(3). For the subgroup of rotations (Orthogonal tensors with determinant equal to one), it is written as SO(3). The same type of material symmetry is obtained by two elasticity tensors if there is a conjugated relation stated as follows:
where represents the transposition of . Forte and Vianello’s paper [2] gave a more precise definition. There are seven non-isotropic symmetry types for the elasticity tensor C [2,3,4,5,6,7] and seven distinct systems for crystals.
The number of distinct components of a high-order physical tensor might be remarkably reduced if it has certain symmetry types. The matrix form of the elasticity tensor C was given in reference [3] for eight symmetry types. The number of distinct components varies from 2 (Isotropic materials) to 21 (Triclinic materials). Therefore, the symmetry classification of the tensors is useful and even becomes indispensable for the experimental identification or theoretical/numerical evaluation of the tensor components. In the tensor function theory, the determination of the number and types of tensor symmetry is also the basic problem for the construction of the tensor function and the determination of the clearest form of a tensor.
1.3. Deviator and Irreducible Decomposition
A tensor is called a deviator, and sometimes it is also called a harmonic tensor because it is traceless and symmetric about any pair of indices of its Cartesian tensor components. For example, a nth-order deviator, denoted by throughout this paper, with components satisfying
Clearly, the scalars and vectors are zero-order and first-order deviators, respectively.
The general high-order tensor is quite complicated. For example, a nth-order general tensor T(n) contains 3n independent components. Therefore, it is impossible to obtain all symmetry types straightforwardly. In the theory of group representations, a nth-order tensor can be decomposed into a direct sum of deviators, the order of which is not higher than n. This is called irreducible or harmonic decomposition. Referring to the work of Zou et al. [8], the detailed direct sum is
where implies that the decomposition involves number of different sth-order deviators. In this paper, and represent scalar and vector, respectively, without any additional indication. The symbol means that this formula is an abbreviated form. Actually, the items in formula (5) are nth-order irreducible tensors. For the complete form of the irreducible decomposition and the methods to manage such decomposition, please refer to reference [8]. As for the elasticity tensor C, its irreducible decomposition takes the form of
or in brief,
where is the Kronecker symbol, which is isotropic for any orthogonal tensor . This decomposition contains two independent scalars, two second-order and one fourth-order deviator, which was widely used in the symmetry problem of the elasticity tensor [2,4,5,6,7]. Meanwhile, the irreducible decomposition was used for the symmetry classification of the other physical tensors [9,10,11,12,13], and it was also applied in tensor analysis.
1.4. The Researches about Even-Order Physics Tensor
For the even-order general tensor T(2n), the irreducible decomposition yields that its symmetry group can be obtained from the intersection of the symmetry group of the relevant deviators:
In above, the combination could be or . As noted, only the odd-order deviators are combined with the permutation tensor . Then, will be an even-order tensor and its symmetry group contains (central inversion). Analogously, in the irreducible decomposition of an odd-order general tensor, the even-order deviators are combined with the permutation tensor . Therefore, the nth-order deviators in the irreducible decompositions will be divided into two types: the even-type and the odd-type , respectively. The definition of even-type deviator is listed as below:
To solve the problem about symmetry classification of the even-order tensors, obviously, the two following tasks should be done. The first is to obtain the symmetry types of even-type deviators; the second is to find a solution to do the intersection of formula (8).
According to this idea, there are abundant results about the symmetry classification of high even-order tensors. Forte and Vianello [2] proved that the number of symmetry types of the elasticity tensor is eight for the first time. Their study greatly promoted a comprehensive understanding and resulted in a series of studies on the symmetry of elasticity tensor [3,4,5,6,7]. The relevant methods were also applied to the other fourth-order physical tensors like the photo-elasticity tensor [9] and the flexoelectric tensor [10].
The deviator is known as a relatively simple tensor of higher-order (the number of distinct components of a nth-order deviator is 2n + 1). However, the structure of the high order deviator is still complicated and it is hard to obtain its symmetry types. Since the was contained in symmetry group of even-order tensors, the corresponding symmetry type is reduced to a subgroup of SO(3). A mature approach has been widely used for the symmetry problems of even-order deviator [2,3,4,5,6,9,10]. It is explained as follows: Firstly, the isomorphism relation between the spaces of nth-order deviators and the spaces of harmonic polynomials with degree n is established. Then, the space of harmonic polynomials is decomposed to terms that are invariant under the specific rotation. The rotation is known as the Cartan decomposition [14]. However, the lack of achievement of general results is regarded as an obvious disadvantage for this method.
1.5. The Symmetry Classification of Even-Type Deviators
Olive and Auffray [15] derived a general conclusion on the number of symmetry types of even-order tensors. They proposed a tool named clips operator, in order to execute the intersection of symmetry types of an even-type deviator couple. As for the symmetry types of arbitrary order even-type deviators, they directly referred to the results of Ihrig and Golubitsky [16]. The modern definition of symmetry classification of tensors was introduced by Huo and Del Piero [17] in 1991 and further modified by Forte and Vianello [2] in 1996. The latter one is now accepted and applied extensively. It is obvious that the results given by Ihrig and Golubitsky [16] in 1984 were earlier than the modern definition of symmetry classification, and a reexamination is required due to the potential shortcomings.
Unlike the existing methods described in previous articles, the symmetry of an arbitrary order even-type deviator is classified by an exclusion of two steps in this paper. The preliminary results are obtained based on the order of tensor, which is well known in existing papers [18]. Then, by utilizing Maxwell’s multipole representation [19], the deviator is expressed in terms of a scalar module and a unit vector set, which could be used to clarify the anisotropic structures and make accurate exclusion about the symmetry types of the deviator. Obviously, the set of unit vectors indicates the multipole structure of deviators, which is a nice geometric view of the deviator. The multipole structure has already been applied in the representation theory of the tensor function to find invariants [19]. The unit vector sets were also used to identify the symmetry type of the physical tensor, the components of which are related to an arbitrarily oriented coordinate system [7,12]. Thus, the specific unit vector sets corresponding to every symmetry type of even-type deviator would be given out, which is one of the contents in this paper.
As noted earlier, the symmetry classification of the even-type deviator is the basis for the symmetry problem of an arbitrary even-order physical tensor. The method of this paper can be extended to the odd-type deviators and the arbitrary order physical tensors easily. The rest of this paper is organized as below. In Section 2, the method route of symmetry classification is given and the symmetry types of even-type deviators are preliminarily determined based on the order of tensor. As the key of this paper, Maxwell’s multipole representation is introduced in this section too. In Section 3, by utilizing Maxwell’s multipole representation, the possible symmetry types of even-type deviators are finally determined. In the end, some refined conclusions and a brief discussion are given in Section 4.
2. Methods and Related Theory
2.1. The Method Route of Symmetry Classification
In this paper, the method of symmetry classification is according to the idea of exclusion. Two steps are shown in Figure 1. The first step is to get a preliminary determination of symmetry types based on the order of the tensor. This results are given by the reference [18] first. In Section 2.2, the preliminary results and corresponding derivation process are reorganized, such as the classification theorem, which collects all possible symmetry types of tensor and the methods to make a preliminary exclusion from the order of the tensor. The second step is to obtain accurate results. The key of this step is the application of Maxwell’s multipole representation. Hence, Section 2.3 is presented to introduce Maxwell’s multipole representation, which has been described in the paper [19]. Above all, the detailed process and the accurate results are introduced in Section 3 based on the contents of this section.
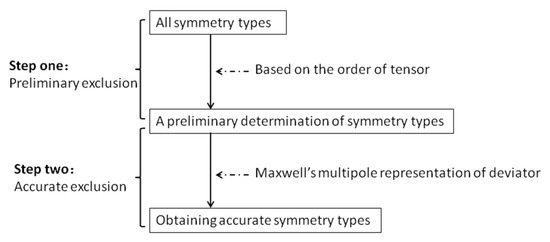
Figure 1.
The method route of symmetry classification.
2.2. Preliminary Results
A fundamental result of symmetry classification is that the collection of involved groups may cover the whole O(3)-closed subgroups and modulo conjugation [18,20,21], which is to collect all possible symmetry types of tensor. The collection is known as the classification theorem. The article of Zheng and Boehler [18] described this theorem in detail. It states that:
- A three-dimensional point group is conjugate to one of the groups given in Table 2.
Table 2. The total collection of O(3)-closed subgroups [18].
According to the definition of the symmetry type of a tensor, there is a straightforward corollary that states that the symmetry types of each tensor are described by one of the point groups in Table 2. Additionally, a very important conclusion (which was reduced to Theorem 2 in the article of Bona et al. [5]) is proposed and proven. It is stated as below:
- If an nth-order tensor is an invariant under a (n + 1)-fold rotation (k 1) about a given axis, then it will be an invariant under any rotation about this axis.
Although the possible symmetry types are numerous in Table 2, the range of scope could be reduced easily according to the tensor’s order. For even-type tensors, the following corollary was firstly reported by Zheng and Boehler [18], and it was rechecked by this research:
Corollary 1.
For even-type deviator , the symmetry group is conjugate to one of the following:
Of course, Corollary 1 also works for the even-order general tensor T(2n).
Thus, the first step of a preliminary determination on symmetry types of even-type deviators is achieved. Although the symmetry types given by formula (10) should be further refined, there are only a few symmetry types that should be ruled out.
2.3. Maxwell’s Multipole Representation
There is a one-to-one correspondence between the pth-order completely symmetric tensors and the homogeneous polynomials of degree p in the three-dimensional [3,9]. According to Sylvester’s theorem [22], the pth-order deviator has the Maxwell’s multipole representation. The representation declares that the pth-order deviator is expressed by the tensor product of p unit vectors (r = 1, ···, p) multiplied by a positive scalar A,
where denotes the traceless symmetric part of the tensor T. The unit vectors are uniquely determined by within sign changes in pairs. Thus are corresponded to 2p poles of a unit sphere, which are called multipole structures of deviators. This simple geometric picture was originally suggested by Maxwell [22] and further executed by Backus [23] and Baerheim [24,25]. It is worth noting that Zou and Zheng [19] provided a direct and constructive establishment of Maxwell’s multipole representation. Maxwell’s multipole representation displays a geometric image on the anisotropic structure of the deviator with its unit vector set {}, so it is very useful in the tensor theory.
The symmetry groups of and in the Equation (8) are
respectively. Simply put, the orthogonal transformation is a symmetry transformation of if the unit vector set {} is invariant or change sign in pairs. Since the permutation tensor is hemitropic, i.e., when , so the value of should change sign in Equation (13).
Based on the spatial geometric relations of the unit vectors, this paper provides an intuitive and convenient approach to reveal the symmetry axis and mirror plane of the deviator. The Cartan decomposition, by contrast, is an algebraic way used in papers [2,3,4,5,6,9,10] for the determination of symmetry types of even-type deviators. Instead of using a subgroup of SO(3) on most of the papers, the symmetry types of even-order tensor are exactly represented by a subgroup of O(3) in this paper.
3. Results
In this section, the possible symmetry types from formula (10) will be checked specifically through the unit vector set from Maxwell’s multipole representation of even-type deviators. Obviously, the scalar α only has the symmetry of and the vector only has the symmetry of .
3.1. Symmetry Types of
A second-order deviator includes a set of two unit vectors and . The orthogonal transformation is a symmetry transformation if the two unit vectors are invariant or change sign in pairs. As shown in Figure 2, it is found that and have two distinct symmetries, namely symmetry when , and symmetry otherwise.
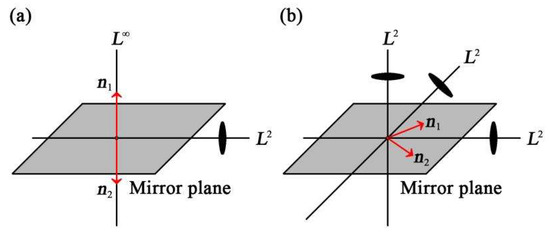
Figure 2.
The two unit vectors and the corresponding symmetry elements: (a) symmetry, its elements are made up of ; (b) symmetry, its elements are made up of .
3.2. Symmetry Types of
The analytical process can be summarized as Table 3: The second column indicates eight possible symmetry types of from the preliminary result (10), and the third column gives the elements of the point group. By analyzing the symmetry of the three unit vectors, the possible symmetry types in the second column are checked one by one and then the accurate symmetry types of is obtained. For example, the symmetry share the same unit vector set with , and , then degenerates into . There is no unit vector set with symmetry, so it is inexistence. For the other six types of symmetry, the unit vector sets in the fourth column show the multipole structure of , the positional relation of which is also described below though the elements of point group, such as mirror plane (MP) and n-fold rotation axis ():
Table 3.
Symmetry types and the unit vector sets of . Note (similarly hereinafter): the symmetry groups marked in red and inside parentheses degenerate or simply do not exist, Null means that there are no invariant unit vector sets under this point group. For simplicity, the principal axis of the point group is set to the e-axis).
- (1)
- symmetry, three arbitrary unit vectors;
- (2)
- symmetry, the three unit vectors are obtained by rotating a unit vector through on the axis;
- (3)
- symmetry, the three unit vectors are located on a plane perpendicular to the axis and share the same separation angle () with each other;
- (4)
- symmetry, one unit vector is located on the axis, the other two unit vectors are located on the MP or take the MP as their mid-separate surface;
- (5)
- symmetry, the three unit vectors are located on three orthogonal axes;
- (6)
- symmetry, the three unit vectors are located on the axis.
3.3. Symmetry Types of
By a similar argument, the deviator was found with seven symmetry types. Because symmetries of and degenerate into symmetries of and , respectively. The unit vector sets corresponding to the seven symmetry types are listed in Table 4, specified as follows:
Table 4.
Symmetry types and the unit vector sets of .
- (1)
- symmetry, four arbitrary unit vectors;
- (2)
- symmetry, one unit vector is located on the axis, the other three unit vectors are obtained by rotating a unit vector through on the axis;
- (3)
- symmetry, the four unit vectors are located on the MP in pair(s) or take the MP as their mid-separate surface in pair(s);
- (4)
- symmetry, there are two situations: (i) the four unit vectors are, respectively, located on the lateral edges of a rectangular based pyramid; (ii) the four unit vectors are located on the MP in pair(s) and take another MP as their mid-separate surface;
- (5)
- symmetry, there are also two situations: (i) the four unit vectors are obtained by rotating a unit vector through on the axis; (ii) all four unit vectors are located on the MP, which is perpendicular to the axis, and ;
- (6)
- symmetry, the four unit vectors are located on the axis;
- (7)
- symmetry, the four unit vectors are respectively located on the space diagonals of a cube.
3.4. Symmetry Types of
Similarly, only 10 types of symmetry exist between the preliminary 14 types of symmetry. Symmetry types of and are unable to obtain by the set of five unit vectors. The unit vector sets corresponding to the 10 types of symmetry are listed in Table 5. The symmetry types are described as follows:
Table 5.
Symmetry types and the unit vector sets of .
- (1)
- symmetry, five arbitrary unit vectors;
- (2)
- symmetry, two unit vectors are located on the axis, three other unit vectors are obtained by rotating a unit vector through on the axis;
- (3)
- symmetry, the five unit vectors are obtained by rotating a unit vector through on the axis;
- (4)
- symmetry, two unit vectors are located on the axis, the other three unit vectors lie on a plane perpendicular to the axis, and they have the same separation angle () to each other;
- (5)
- symmetry, the five unit vectors lie on a plane perpendicular to the axis, and they have the same separation angle () to each other;
- (6)
- symmetry, one unit vector is located on the axis, the other four unit vectors lie on the MP in pair(s) or take the MP as their mid-separate surface in pair(s);
- (7)
- symmetry, one unit vector is located on the axis, there are two possibilities for the other four unit vectors: (i) the four unit vectors are obtained by rotating a unit vector through on the axis; (ii) all of the four unit vectors lie on the MP which is perpendicular to the axis, and ;
- (8)
- symmetry, three unit vectors are located on the axis, the other two unit vectors lie on an MP and regard another MP as their mid-separate surface;
- (9)
- symmetry, one unit vector is located on the axis, the other four unit vectors lie on the MP which is perpendicular to the axis and the angle between the adjacent vectors is ;
- (10)
- symmetry, the five unit vectors are all located on the axis.
3.5. Symmetry Types of
For , only 12 types of symmetry exist between the preliminary 16 types of symmetry. Because symmetry of and degenerate into the symmetry of and , respectively. The unit vector sets corresponding to the 12 types of symmetry are listed in Table 6, which are described as follows:
Table 6.
Symmetry types and the unit vector sets of H(6).
- (1)
- symmetry, six arbitrary unit vectors;
- (2)
- symmetry, the six unit vectors are obtained by rotating two different unit vectors through on the axis;
- (3)
- symmetry, there are two situations: (i) three unit vectors are located on the axis, the other three unit vectors are obtained by rotating a unit vector through on the axis; (ii) the six unit vectors are obtained by rotating two different unit vectors through on the axis, and the two unit vectors are on the same MP;
- (4)
- symmetry, one unit vector is located on the axis, the other five unit vectors are obtained by rotating a unit vector through on the axis;
- (5)
- symmetry, the six unit vectors lie on the MP in pair(s) or take the MP as their mid-separate surface in pair(s);
- (6)
- symmetry, there are two situations: (i) two unit vectors lie on an MP and take another MP as their mid-separate surface, the other four unit vectors are located on the lateral edges of a rectangular pyramid, respectively; (ii) the six unit vectors lie on an MP in pair(s) and take another MP as their mid-separate surface;
- (7)
- symmetry, two unit vectors are located on the axis. Two possibilities are retained in the other four unit vectors: (i) the four unit vectors are obtained by rotating a unit vector through on the axis; (ii) all four unit vectors lie on an MP which is perpendicular to the axis, and
- (8)
- symmetry, the six unit vectors are obtained by rotating a unit vector through on the axis;
- (9)
- symmetry, the six unit vectors are located on the axis;
- (10)
- symmetry, the six unit vectors are located on the face diagonals of a cube, respectively;
- (11)
- symmetry, the six unit vectors are located on three orthogonal axes in pair, respectively;
- (12)
- symmetry, the six unit vectors are located on six axes, respectively.
3.6. Characteristic Web Trees
The examinations of the integrity of the unit vector sets in the Table 3, Table 4, Table 5 and Table 6 presented above are necessary. This is accomplished by introducing the characteristic web tree of tensors [12]. It is known that the symmetry group may contain some other symmetry groups, so it has a relatively higher symmetry. For two symmetry groups A and B, if A ⊂ B, then A is called the subgroup of B, while B is the mother group of A. If the other mother groups contained by B are not obtained by A, then A→B is defined. In so doing, all possible consequences finally generate a characteristic web tree of deviators shown in Figure 3. With the insertion of an additional orthogonal transformation, the number of independent variables in the deviator may be remarkably reduced. The corresponding unit vector sets are also specialized. Take the as an example, when it contains symmetry, the unit vector set is . From its characteristic web tree in Figure 3a, the following conclusions are given.
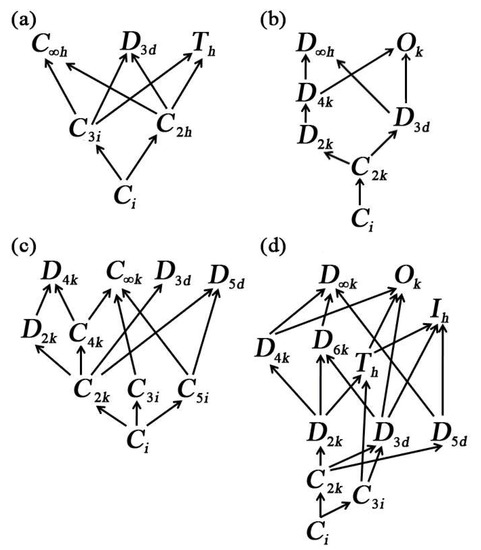
Figure 3.
Characteristic web trees: (a); (b) ); (c) ; (d) .
- (1)
- ⊂. For and through a proper rotation, the set is the same with the set corresponding to ;
- (2)
- ⊂ . For , the set becomes corresponding to ;
- (3)
- ⊂ . For , the set becomes , which is corresponding to .
Additionally, this relation could be checked for each pair of symmetry groups in Figure 3. Namely, if A ⊂ B, by introducing some constraint conditions and commencing a proper rotation, the unit vector set corresponding to A will become the unit vector set corresponding to B. According to such an examination, the correctness and integrity of the unit vector sets in Table 3, Table 4, Table 5 and Table 6 are verified.
3.7. The General Results
For higher order deviator , its symmetry types are determined by the unit vector set of similar methods. The preliminary symmetry types of (10) will be checked one by one through the set unit vectors. For symmetry type A, there are three possible situations: (1) the unit vector sets with symmetry A are found out and the other relatively higher symmetries are not possessed by them, then the symmetry A is proved to exist; (2) these unit vector sets possess a relatively higher symmetry B, namely A ⊂ B, which means that symmetry A degenerates into symmetry B and symmetry A is nonexistent; (3) the unit vector set cannot be found out, then symmetry A is nonexistent. The preliminary symmetry types of in (10) are analyzed as below:
- (1)
- It is obvious that and symmetries exist.
- (2)
- For , there are three situations when k is odd and : (i) The symmetry exists when is odd (namely ). One of the unit vector sets is: the (n − k) unit vectors are located on the axis and the other k unit vectors are obtained by rotating a unit vector through on the axis; (ii) the symmetry exists when is even (namely ) and . One of the unit vector sets is: the (n − 2k) unit vectors are located on the axis, the other 2k unit vectors are obtained by rotating two different unit vectors through on the axis; (iii) the symmetry is nonexistent when n is even and . The unit vector set with symmetry is: the (n − k) unit vectors are located on the axis, the other k unit vectors are obtained by rotating a unit vector through on the axis. Meanwhile, this unit vector set owns the symmetric axis, which is perpendicular to the axis. So, symmetry degenerates into symmetry .
- (3)
- For , there are two situations when k is odd and : (i) the symmetry exists when n is odd. One of the unit vector sets is: the (n − k) unit vectors are located on the axis, the other k unit vectors are located on a plane perpendicular to the axis and share the same separation angle with each other; (ii) the symmetry exists when n is even. One of the unit vector sets is: the (n − k) unit vectors are located on the axis, the other k unit vectors are obtained by rotating a unit vector through on the axis.
- (4)
- For , there are three situations when k is even and : (i) the symmetry exists when n is odd. One of the unit vector sets is: the (n − k) unit vectors are located on the axis, the other k unit vectors are obtained by rotating a unit vector through on the axis; (ii) the symmetry exists when n is even and . One of the unit vector sets is: the (n − 2k) unit vectors are located on the axis, the other 2k unit vectors are obtained by rotating two different unit vectors through on the axis; (iii) the symmetry is inexistence when n is even and . The unit vector set with symmetry is: the (n − k) unit vectors are located on the axis, the other k unit vectors are obtained by rotating a unit vector through on the axis. Meanwhile, this unit vector set owns the symmetric axis, which is perpendicular to the axis, so symmetry degenerates into symmetry .
- (5)
- For , there are two situations when k is even and : (i) the symmetry exists when n is odd. One of the unit vector sets is: the (n − k) unit vectors are located on the axis, the other k unit vectors are located on the MP, which is perpendicular to the axis and the angle between adjacent vectors is ; (ii) symmetry exists when n is even. One of the unit vector sets is: the (n − k) unit vectors are located on the axis, the other k unit vectors are obtained by rotating a unit vector through on the axis.
- (6)
- Symmetry exists and is nonexistent when n is odd; instead, the symmetry exists and is nonexistent when n is even. The n unit vectors are all located on the axis in both cases.
- (7)
- For and , clearly that the two point groups, respectively, described the geometric symmetry of a regular tetrahedron and a cube, and is just like the regular tetrahedron embedded inside the cube. According to the previous results, the has symmetry when its three unit vectors are on three concurrent edges of a cube. Additionally, the also has symmetry when the six unit vectors are on face diagonals (in adjacent three faces) of a cube. Notice that and are unable to obtain symmetry because their value will change sign for these two corresponding unit vector sets. The symmetry is obtained by when the four unit vectors are on space diagonals of a cube. Based on the similar principle of doing intersection of point groups and two negatives make an affirmative, the situations of symmetry and are as below:
- (i)
- When (, and are non-negative integers) and , namely n = 7 or , the symmetry exists for . The n unit vectors are all located in a cube: unit vectors are evenly located on three concurrent edges, unit vectors are evenly located on six face diagonals and unit vectors are evenly located on four space diagonals;
- (ii)
- When and , namely n = 8, 9, 10 or , the symmetry exists for and all of the n unit vectors are also located in a cube in the situation mentioned above. The reason of is that the value of will be invariant under even times of change in the sign.
- (8)
- For symmetry , this point group describes the geometric symmetry of a regular dodecahedron. The six axes are the lines that come through the body-centered point and two face-centered points (12 regular pentagonal faces). The ten axes are the lines that come through the body-centered point and two vertices (20 vertices). The fifteen axes are all parallel to the edges (30 edges). The deviators of and all contain symmetry , and their sets of unit vectors are on the rotation-axes of a regular dodecahedron: the six unit vectors of are on six axes; the ten unit vectors of are on ten axes; the fifteen unit vectors of are on fifteen axes. So, has symmetry when , namely or , .
Above all, the general results about symmetry types of all order even-type deviators are provided and they can be stated as below:
Theorem 1.
For an even-type deviator , the symmetry types are given as follow:
- ;
- ;
4. Conclusions
In this paper, the symmetry types of all even-type deviators have been derived by the idea of exclusion of two steps: Firstly, the preliminary symmetry types are obtained by doing an exclusion towards all possible symmetry types, which is according to the order of tensor and the existing results of the literature review. Secondly, the symmetry types of p-order deviator are determined by analyzing its unit vector set under the orthogonal transformation, which is Maxwell’s multipole representation of deviator. Based on the spatial geometric relations of the unit vectors, an intuitive and convenient approach is provided to reveal the potential symmetric axes and the mirror planes of the deviator. By comparing the results of Ihrig and Golubitsky [16] (Theorem 6.6), Olive and Auffray [15] (Theorem 5.1), some modifications are made: (1) is not a symmetry type for ; (2) is a symmetry type for ; (3) is not a symmetry type for ; (4) is not a symmetry type for H(16).
Maxwell’s multipole representation displays a geometric image on the anisotropic structure of the deviator with its unit vector set, so it is very useful in the tensor theory. For each symmetry type of the even-type deviator up to sixth-order, this paper gives the corresponding unit vector set with the representation of a specific multipole structure. Another important application on symmetry problem is that the multipole structure can be used in symmetry identification of an unknown physical tensor and for necessary back-calculation of the involved physical coefficients. The integrity of all involved unit vector sets has been checked through the characteristic web tree.
The symmetry classification of even-type deviators is the basis for the symmetry problems of an arbitrary even-order physical tensor. Application examples are given in the Appendix A according to the method and results of this paper for all kinds of fourth-order tensors, such as elasticity tensor, flexoelectric tensor and photo-elastic tensor. The symmetry classification of these tensors has already been studied in different literatures, and all these related literatures were discussed through a similar computational method, which has the drawback of not providing general results. Furthermore, the complexity of the symmetry problem increases as the order of the tensor. This paper provides the general results about symmetry types of all order even-type deviators. As the follow-up studies, a complete answer to the symmetry types of even-order tensors also can be realized with the similar exclusion of two steps: Firstly, the preliminary symmetry types could be applied to all general tensors; secondly, the accurate exclusion will be achieved by doing the intersection of point group instead. Details of this process are exhibited by giving examples in Appendix A. The method and investigation of this paper can also be extended to the situation of odd-order tensor without any increase of complexity.
Author Contributions
Conceptualization, C.T.; methodology, C.T. and W.Z.; validation, C.T., W.W. and L.Z.; formal analysis, C.T.; investigation, W.W. and L.Z.; resources, C.T.; data curation, C.T.; writing—original draft preparation, C.T.; writing—review and editing, W.W.; visualization, W.W.; supervision, W.Z.; project administration, W.Z. and C.T.; funding acquisition, C.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Science Foundation for Distinguished Young Scholars of China, grant number 11802112.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data available on request due to restrictions like data capacity. The data presented in this study are available on request from the corresponding author.
Acknowledgments
Especially thanks to the co-author (Zou, Institute for Advanced Study, Nanchang University) for his support in this paper.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
By using the analytical methods and results of this paper, the number and types of symmetry for all kinds of fourth-order tensors is restudied, namely the physical tensors of elasticity tensor C, flexoelectric tensor F and photoelastic tensor M. For the general tensor , the possible symmetry types given by (10) are
Similarly, the 12 symmetry types could be further refined. Considering index symmetry of the three different fourth-order physical tensors, their irreducible decomposition is
Then, their symmetry types are obtained through the intersection of the symmetry of the relevant deviators. From the results of this paper, the symmetry types of the relevant even-type deviators are
Thus, the results in Table A1 are obtained quickly with the complete analysis process stated as follows:
- (1)
- The 12 possible symmetry types are listed in the second column. Corresponding to each symmetry type, the symmetry types of deviators are discovered and listed in the third to the sixth columns. Null means it is nonexistent.
- (2)
- Considering the irreducible decomposition (A2)–(A4), this step is to check whether each symmetry type in the second column can be determined through the intersection of the symmetry of the relevant deviators. If the symmetry types exist, the number of distinct components will be given in the next step. Null is given for the other situations.
- (3)
- Corresponding to each symmetry type of deviators, the number of distinct components is calculated due to its multipole structure (namely the unit vector sets). Thus, the number of distinct components φ for the three different physical tensors is calculated as:where is the number of sth-order deviators in the irreducible decomposition. The correctness of these results in Table A1 is verified, the elasticity tensor C is referred to the article [2] and the flexoelectric tensor F is referred to the article [10]. It’s worth noting that this method could also be applied for higher even-order tensors.
Table A1.
Symmetry types and distinct components of fourth-order tensors.
Table A1.
Symmetry types and distinct components of fourth-order tensors.
| No. | Symmetry Types | C | F | M | |||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 21 | 54 | 36 | ||||||
| 2 | Null | 18 | 12 | ||||||
| 3 | Null | 6 | 10 | 8 | |||||
| 4 | 13 | 28 | 20 | ||||||
| 5 | Null | 14 | 10 | ||||||
| 6 | Null | 12 | 8 | ||||||
| 7 | Null | 9 | 15 | 12 | |||||
| 8 | Null | Null | 6 | 8 | 7 | ||||
| 9 | Null | Null | 5 | 7 | 6 | ||||
| 10 | Null | Null | Null | 5 | 4 | ||||
| 11 | Null | Null | Null | 3 | 3 | 3 | |||
| 12 | Null | Null | Null | Null | 2 | 2 | 2 |
References
- Mindlin, R.D.; Eshel, N.N. On first strain-gradient theories in linear elasticity. Int. J. Solids Struct. 1968, 4, 109–124. [Google Scholar] [CrossRef]
- Forte, S.; Vianello, M. Symmetry classes for elasticity tensors. J. Elast. 1996, 43, 81–108. [Google Scholar] [CrossRef]
- Chadwick, P.; Vianello, M.; Cowin, S.C. A new proof that the number of linear elastic symmetries is eight. J. Mech. Phys. Solids 2001, 49, 2471–2492. [Google Scholar] [CrossRef]
- Bona, A.; Bucataru, I.; Slawinski, M.A. Material symmetries of elasticity tensors. Q. J. Mech. Appl. Math. 2004, 57, 583–598. [Google Scholar] [CrossRef]
- Bona, A.; Bucataru, I.; Slawinski, M.A. Coordinate-free Characterization of the Symmetry Classes of Elasticity Tensors. J. Elast. 2007, 87, 109–132. [Google Scholar] [CrossRef]
- Diner, C.; Kochetov, M.; Slawinski, M.A. Identifying Symmetry Classes of Elasticity Tensors Using Monoclinic Distance Function. J. Elast. 2011, 102, 175–190. [Google Scholar] [CrossRef]
- Zou, W.N.; Tang, C.X.; Lee, W.H. Identification of symmetry type of linear elastic stiffness tensor in an arbitrarily orientated coordinate system. Int. J. Solids Struct. 2013, 50, 2457–2467. [Google Scholar] [CrossRef]
- Zou, W.N.; Zheng, Q.S.; Du, D.X.; Rychlewski, J. Orthogonal Irreducible Decompositions of Tensors of High Orders. Math. Mech. Solids 2001, 6, 249–267. [Google Scholar] [CrossRef]
- Forte, S.; Vianello, M. Symmetry classes and harmonic decomposition for photoelasticity tensors. Int. J. Eng. Sci. 1997, 35, 1317–1326. [Google Scholar] [CrossRef]
- Le, Q.C.; He, Q.C. The number and types of all possible rotational symmetries for flexoelectric tensors. Proc. R. Soc. A-Math. Phys. 2011, 467, 2369–2386. [Google Scholar]
- Auffray, N.; Quang, H.L.; He, Q.C. Matrix representations for 3D strain-gradient elasticity. J. Mech. Phys. Solids 2013, 61, 1202–1223. [Google Scholar] [CrossRef]
- Zou, W.N.; Tang, C.X.; Pan, E. Symmetry types of the piezoelectric tensor and their identification. Proc. R. Soc. A-Math. Phys. 2013, 469, 20120755. [Google Scholar] [CrossRef]
- Lazar, M. Irreducible decomposition of strain gradient tensor in isotropic strain gradient elasticity. Zeitschrift Fur Angewandte Mathematik Und Mechanik 2016, 96, 1291–1305. [Google Scholar] [CrossRef]
- Golubitsky, M. Singularities and groups in bifurcation theory, Volume I. Acta Appl. Math. 1985, 51, 185–190. [Google Scholar]
- Olive, M.; Auffray, N. Symmetry classes for even-order tensors. Math. Mech. Complex Syst. 2013, 2, 177–210. [Google Scholar] [CrossRef]
- Ihrig, E.; Golubitskyb, M. Pattern selection with O(3) symmetry. Phys. D 1984, 13, 1–33. [Google Scholar] [CrossRef]
- Huo, Y.Z.; Delpiero, G. On the completeness of the crystallographic symmetries in the description of the symmetries of the elastic tensor. J. Elast. 1991, 25, 203–246. [Google Scholar]
- Zheng, Q.S.; Boehler, J.P. Groups and Symmetry. The description, classification, and reality of material and physical symmetries. Acta Mech. 1994, 102, 73–89. [Google Scholar] [CrossRef]
- Zou, W.N.; Zheng, Q.S. Maxwell’s multipole representation of traceless symmetric tensors and its application to functions of high-order tensors. Proc. R. Soc. A-Math. Phys. 2003, 459, 527–538. [Google Scholar] [CrossRef]
- Armstrong, M.A. Groups and Symmetry; Springer: Berlin, Germany, 1998; Volume 41, pp. 645–655. [Google Scholar]
- Hahn, T. Space-Group Symmetry; Kluwer Academic Publishers: London, UK, 2002; Volume 19, pp. 173–179. [Google Scholar]
- Maxwell, J.C.A. A treatise on electricity and magnetism. Nature 1954, 7, 478–480. [Google Scholar]
- Backus, G. A geometrical picture of anisotropic elastic tensors. Rev. Geophys. 1970, 8, 633–671. [Google Scholar] [CrossRef]
- Baerheim, R. Harmonic decomposition of the anisotropic elasticity tensor. Q. J. Mech. Appl. Math. 1993, 46, 391–418. [Google Scholar] [CrossRef]
- Baerheim, R. Classication of symmetry by means of Maxwell multipoles. Q. J. Mech. Appl. Math. 1998, 51, 73–104. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).