Effects of Helix Geometry on Magnetic Guiding of Helical Polymer Composites on a Gastric Cancer Model: A Feasibility Study

 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Method: Rolling Actuation on Flat Surfaces
2.3. Method: Magnetomotility Experiments on a Gastric Cancer Model
3. Results
3.1. Rolling Actuation on Flat Surfaces
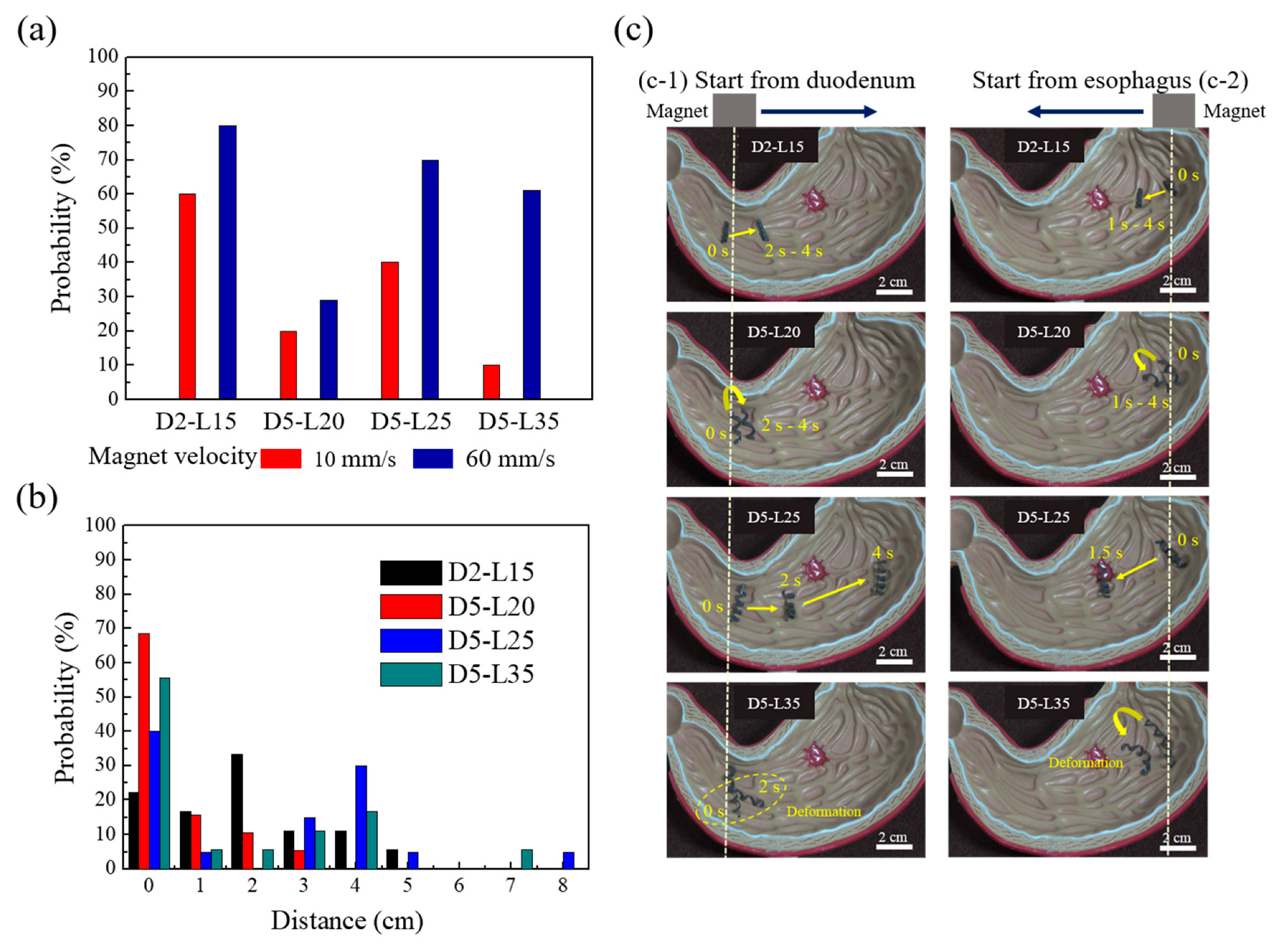
3.2. Magnetomotility Experiments on a Gastric Cancer Model
3.3. Influence of Helix Geometry
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Torre, L.A.; Bray, F.; Siegel, R.L.; Ferlay, J.; Lortet-Tieulent, J.; Jemal, A. Global cancer statistics, 2012. CA Cancer J. Clin. 2015, 65, 87–108. [Google Scholar] [CrossRef] [PubMed]
- Smyth, E.C.; Verheij, M.; Allum, W.; Cunningham, D.; Cervantes, A.; Arnold, D. Gastric cancer: ESMO Clinical Practice Guidelines for diagnosis, treatment and follow-up. Ann. Oncol. 2016, 27, v38–v49. [Google Scholar] [CrossRef]
- Forman, D.; Burley, V.J. Gastric cancer: global pattern of the disease and an overview of environmental risk factors. Best Pract. Res. Clin. Gastroenterol. 2006, 20, 633–649. [Google Scholar] [CrossRef]
- Yamamoto, S. Stomach cancer incidence in the world. Jpn. J. Clin. Oncol. 2001, 31, 471. [Google Scholar]
- Jun, J.K.; Choi, K.S.; Lee, H.-Y.; Suh, M.; Park, B.; Song, S.H.; Jung, K.W.; Lee, C.W.; Choi, I.J.; Park, E.-C. Effectiveness of the korean national cancer screening program in reducing gastric cancer mortality. Gastroenterology 2017, 152, 1319–1328. [Google Scholar] [CrossRef]
- Hamashima, C.; Systematic Review Group; Guideline Development Group for Gastric Cancer Screening Guidelines. Update version of the japanese guidelines for gastric cancer screening. Jpn. J. Clin. Oncol. 2018, 48, 673–683. [Google Scholar] [CrossRef] [PubMed]
- Ben-Menachem, T.; Decker, G.A.; Early, D.S.; Evans, J.; Fanelli, R.D.; Fisher, D.A.; Fisher, L.; Fukami, N.; Hwang, J.H.; Ikenberry, S.O. Adverse events of upper GI endoscopy. Gastrointest. Endosc. 2012, 76, 707–718. [Google Scholar] [CrossRef] [PubMed]
- Vikram Singh, A.; Sitti, M. Targeted drug delivery and imaging using mobile milli/microrobots: A promising future towards theranostic pharmaceutical design. Curr. Pharm. Des. 2016, 22, 1418–1428. [Google Scholar] [CrossRef]
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef]
- Ceylan, H.; Giltinan, J.; Kozielski, K.; Sitti, M. Mobile microrobots for bioengineering applications. Lab Chip 2017, 17, 1705–1724. [Google Scholar] [CrossRef]
- Goenka, M.K.; Majumder, S.; Goenka, U. Capsule endoscopy: Present status and future expectation. World J. Gastroenterol. 2014, 20, 10024. [Google Scholar] [CrossRef] [PubMed]
- Liao, Z.; Gao, R.; Xu, C.; Li, Z.-S. Indications and detection, completion, and retention rates of small-bowel capsule endoscopy: A systematic review. Gastrointest. Endosc. 2010, 71, 280–286. [Google Scholar] [CrossRef] [PubMed]
- Carpi, F.; Kastelein, N.; Talcott, M.; Pappone, C. Magnetically controllable gastrointestinal steering of video capsules. IEEE Trans. Biomed. Eng. 2010, 58, 231–234. [Google Scholar] [CrossRef] [PubMed]
- Munoz, F.; Alici, G.; Li, W. A review of drug delivery systems for capsule endoscopy. Adv. Drug Deliv. Rev. 2014, 71, 77–85. [Google Scholar] [CrossRef] [PubMed]
- Carpi, F.; Pappone, C. Magnetic robotic manoeuvring of gastrointestinal video capsules: preliminary phantom tests. Biomed. Pharmacother. 2008, 62, 546–549. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.G.; Park, J.E.; Won, S.; Jeon, J.; Wie, J.J. Contactless manipulation of soft robots. Materials 2019, 12, 3065. [Google Scholar] [CrossRef]
- Jeon, S.; Hoshiar, A.K.; Kim, K.; Lee, S.; Kim, E.; Lee, S.; Kim, J.; Nelson, B.J.; Cha, H.-J.; Yi, B.-J. A magnetically controlled soft microrobot steering a guidewire in a three-dimensional phantom vascular network. Soft Robot. 2019, 6, 54–68. [Google Scholar] [CrossRef]
- Yim, S.; Sitti, M. 3-D localization method for a magnetically actuated soft capsule endoscope and its applications. IEEE Trans. Robot. 2013, 29, 1139–1151. [Google Scholar] [CrossRef]
- Lum, G.Z.; Ye, Z.; Dong, X.; Marvi, H.; Erin, O.; Hu, W.; Sitti, M. Shape-programmable magnetic soft matter. Proc. Natl. Acad. Sci. USA 2016, 113, E6007–E6015. [Google Scholar] [CrossRef]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.-X.J.; et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2, eaaq1155. [Google Scholar] [CrossRef]
- Alcântara, C.C.J.; Kim, S.; Lee, S.; Jang, B.; Thakolkaran, P.; Kim, J.; Choi, H.; Nelson, B.J.; Pané, S. 3D Fabrication of fully iron magnetic microrobots. Small 2019, 15, 1805006. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, X.; Alcântara, C.C.J.; Sevim, S.; Hoop, M.; Terzopoulou, A.; de Marco, C.; Hu, C.; de Mello, A.J.; Falcaro, P. MOFBOTS: Metal–Organic-Framework-Based Biomedical Microrobots. Adv. Mater. 2019, 31, 1901592. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Scheres, S.H.W. Helical reconstruction in RELION. J. Struct. Biol. 2017, 198, 163–176. [Google Scholar] [CrossRef] [PubMed]
- Constantino, M.A.; Jabbarzadeh, M.; Fu, H.C.; Bansil, R. Helical and rod-shaped bacteria swim in helical trajectories with little additional propulsion from helical shape. Sci. Adv. 2016, 2, e1601661. [Google Scholar] [CrossRef]
- Pak, O.S.; Spagnolie, S.E.; Lauga, E. Hydrodynamics of the double-wave structure of insect spermatozoa flagella. J. R. Soc. Interface 2012, 9, 1908–1924. [Google Scholar] [CrossRef]
- Park, J.E.; Jeon, J.; Cho, J.H.; Won, S.; Jin, H.J.; Lee, K.H.; Wie, J.J. Magnetomotility of untethered helical soft robots. RSC Adv. 2019, 9, 11272–11280. [Google Scholar] [CrossRef]
- Wie, J.J.; Shankar, M.R.; White, T.J. Photomotility of polymers. Nat. Commun. 2016, 7, 13260. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D2-L15 | D5-L20 | D5-L25 | D5-L35 | |
|---|---|---|---|---|
| Weight (mg) | 30 | 30 | 40 | 40 |
| Pitch (mm) | 3 | 10 | 5 | 10 |
| Diameter (mm) | 2 | 5 | 5 | 5 |
| Length (mm) | 15 | 20 | 25 | 35 |
| D2-L15 | D5-L20 | D5-L25 | D5-L35 | |
|---|---|---|---|---|
| Average of X-axis distance (cm) | 2.1 | 1.1 | 3.2 | 2.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Park, J.E.; Wie, J.J.; Yang, S.G.; Lee, D.H.; Jin, Y.-J. Effects of Helix Geometry on Magnetic Guiding of Helical Polymer Composites on a Gastric Cancer Model: A Feasibility Study. Materials 2020, 13, 1014. https://doi.org/10.3390/ma13041014
Kim Y, Park JE, Wie JJ, Yang SG, Lee DH, Jin Y-J. Effects of Helix Geometry on Magnetic Guiding of Helical Polymer Composites on a Gastric Cancer Model: A Feasibility Study. Materials. 2020; 13(4):1014. https://doi.org/10.3390/ma13041014
Chicago/Turabian StyleKim, Yongju, Jeong Eun Park, Jeong Jae Wie, Su Geun Yang, Don Haeng Lee, and Young-Joo Jin. 2020. "Effects of Helix Geometry on Magnetic Guiding of Helical Polymer Composites on a Gastric Cancer Model: A Feasibility Study" Materials 13, no. 4: 1014. https://doi.org/10.3390/ma13041014
APA StyleKim, Y., Park, J. E., Wie, J. J., Yang, S. G., Lee, D. H., & Jin, Y.-J. (2020). Effects of Helix Geometry on Magnetic Guiding of Helical Polymer Composites on a Gastric Cancer Model: A Feasibility Study. Materials, 13(4), 1014. https://doi.org/10.3390/ma13041014