Design and Optimization of an Efficient (96.1%) and Compact (2 kW/dm3) Bidirectional Isolated Single-Phase Dual Active Bridge AC-DC Converter

Abstract
:1. Introduction
1.1. Overview and Objectives
1.2. Outline
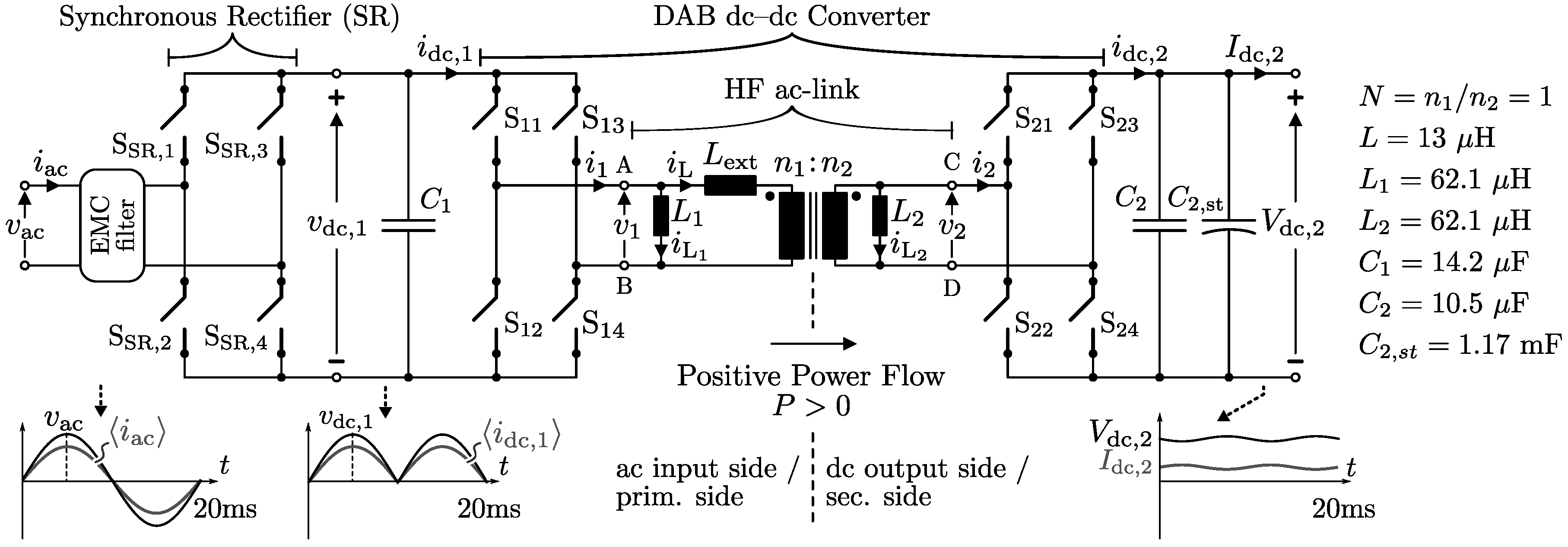
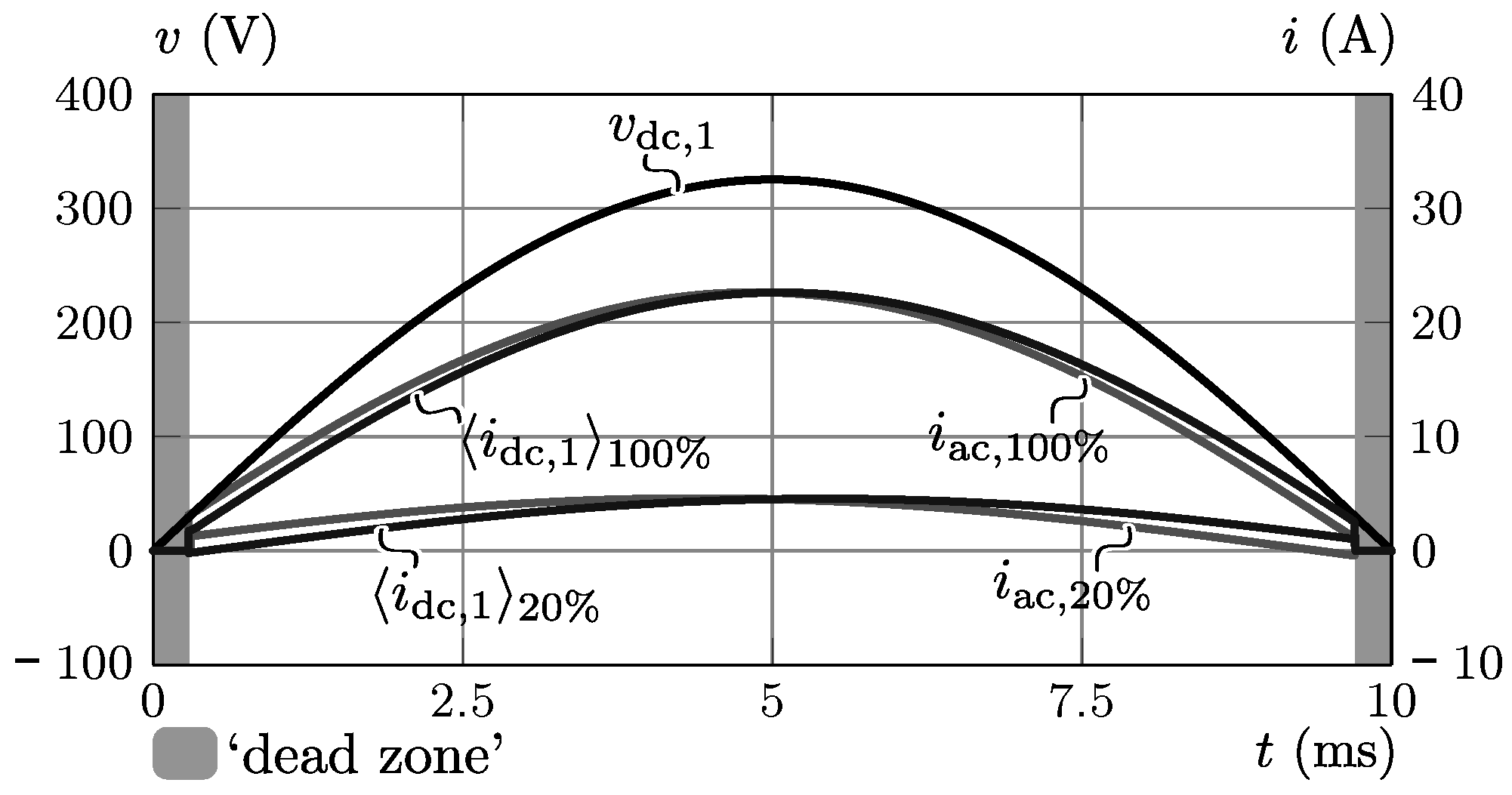
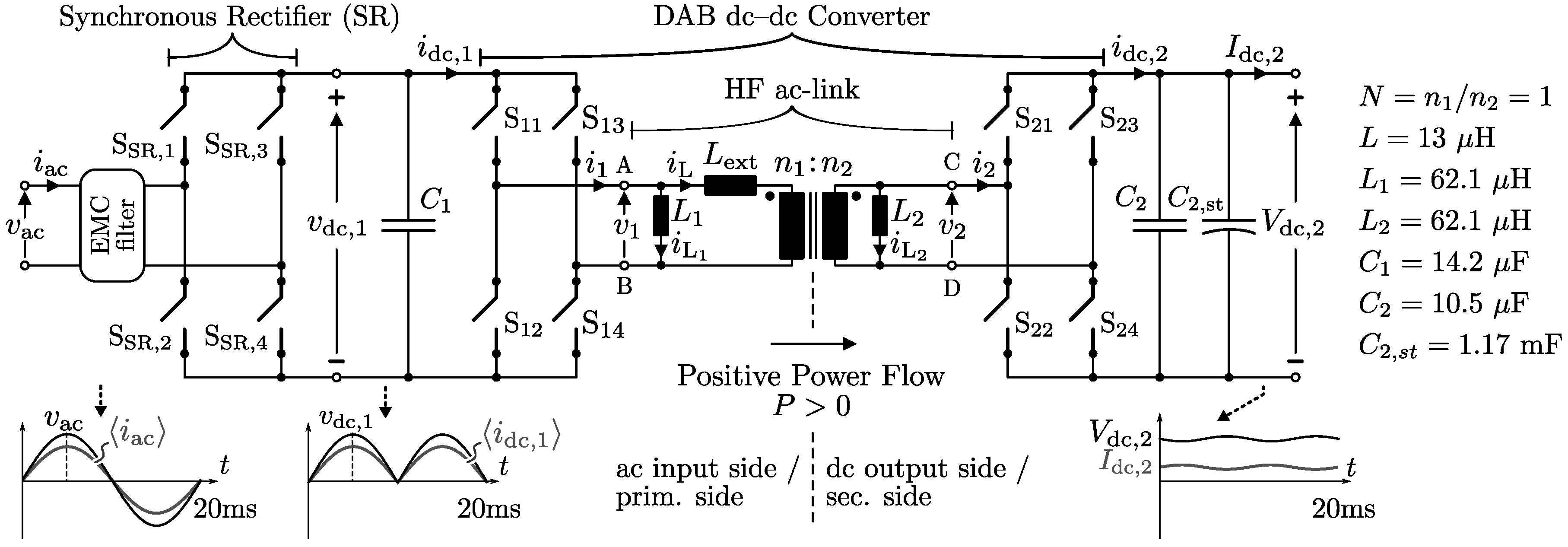
2. General Operating Principle of the 1-S Dual Active Bridge (DAB) AC-DC Converter
3. Optimal Zero Voltage Switching (ZVS) Operation of the DAB DC-DC converter
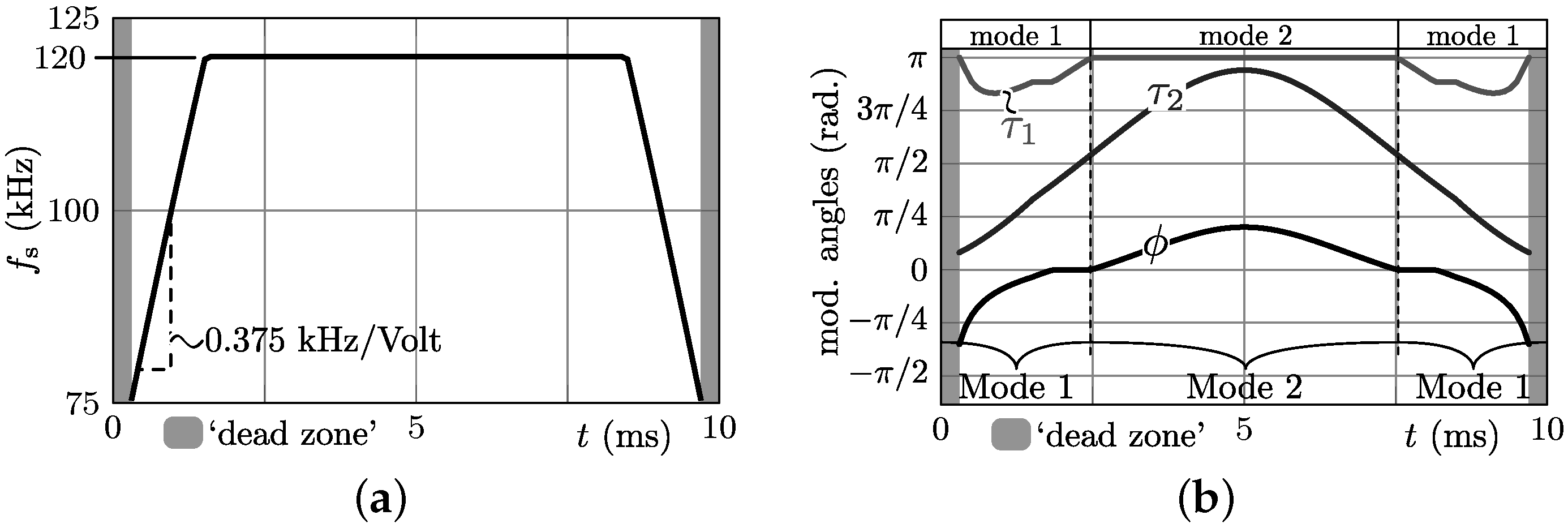
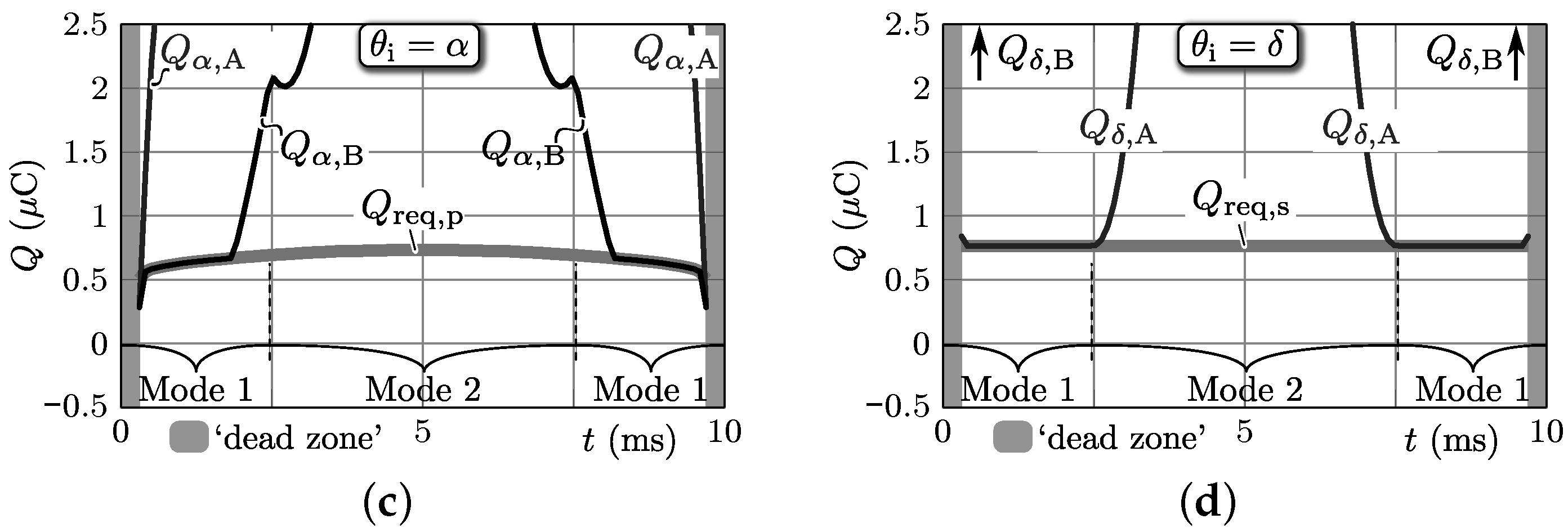
3.1. Operating Principle, Available Modulation Parameters, and Relevant Switching Modes
3.2. Efficient ZVS Modulation Scheme
3.3. Selection of Circuit Variables
3.3.1. Switching Frequency ()
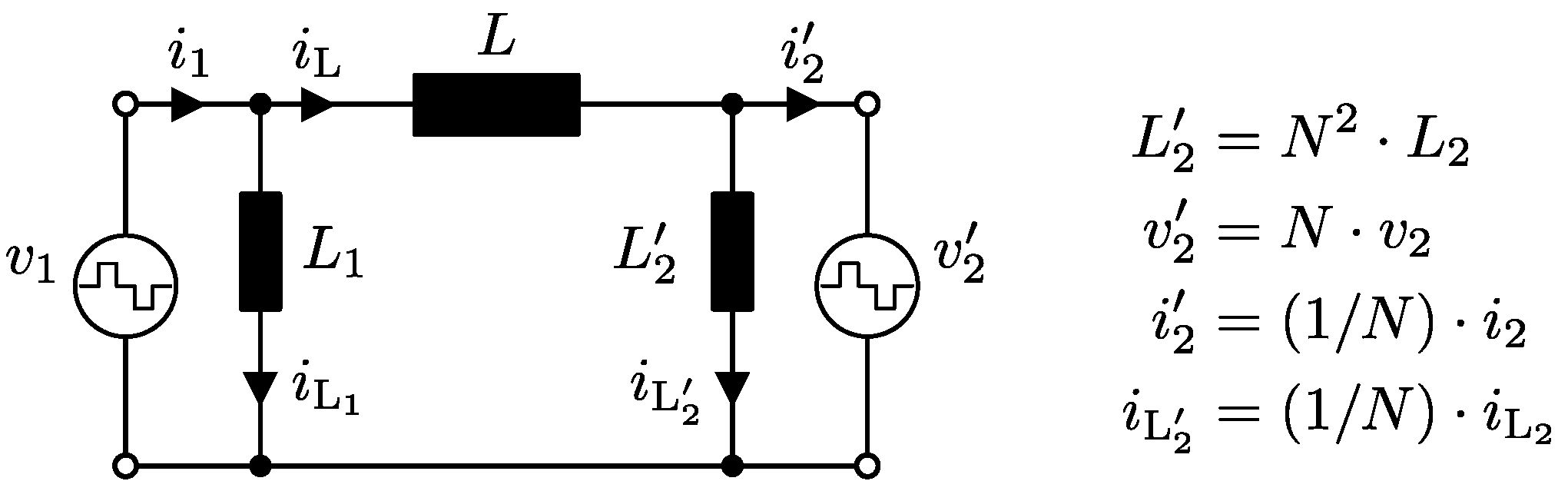
3.3.2. Transformer Turns Ratio
3.3.3. Main Energy Transfer Inductance
3.3.4. Commutation Inductances and
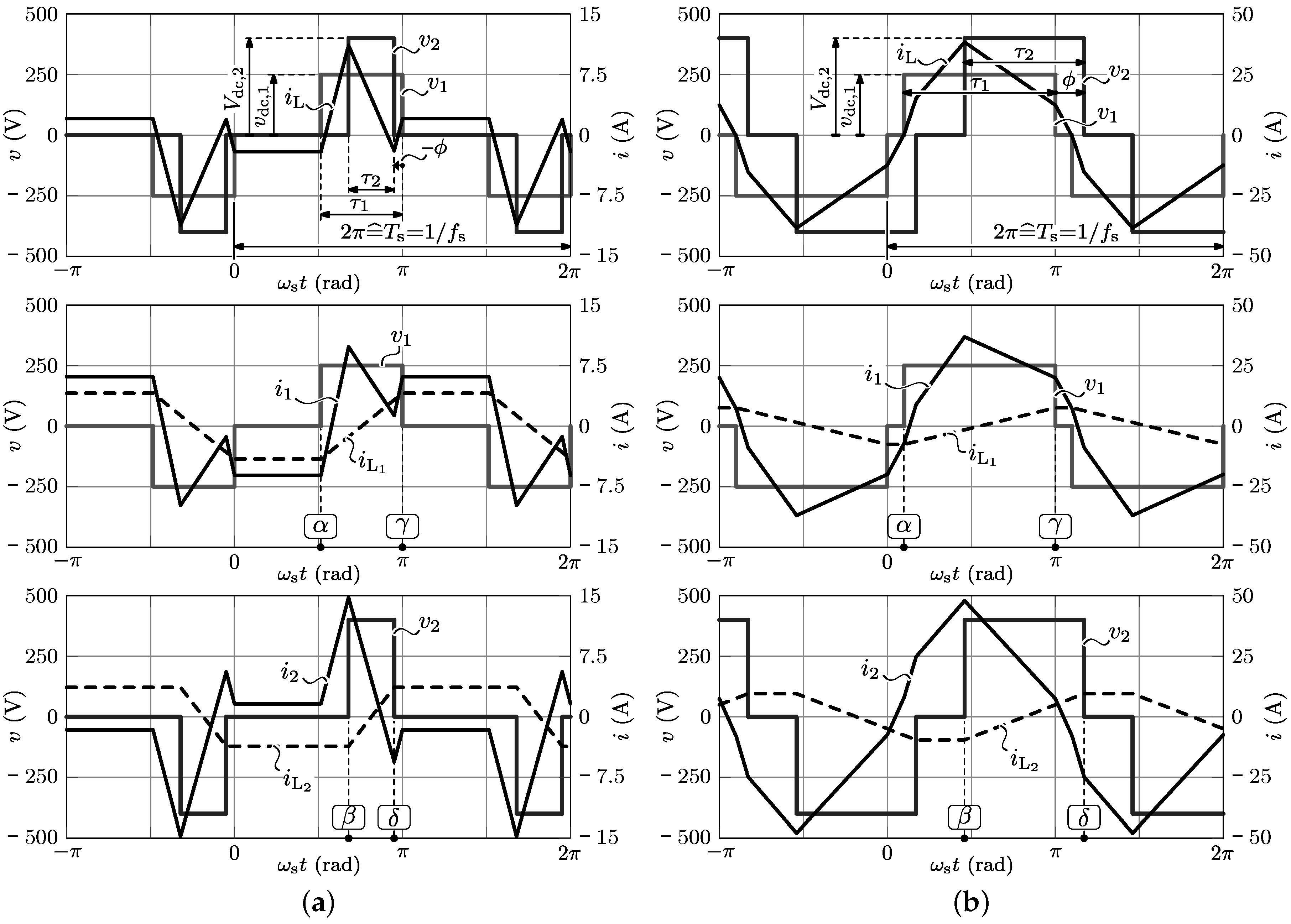
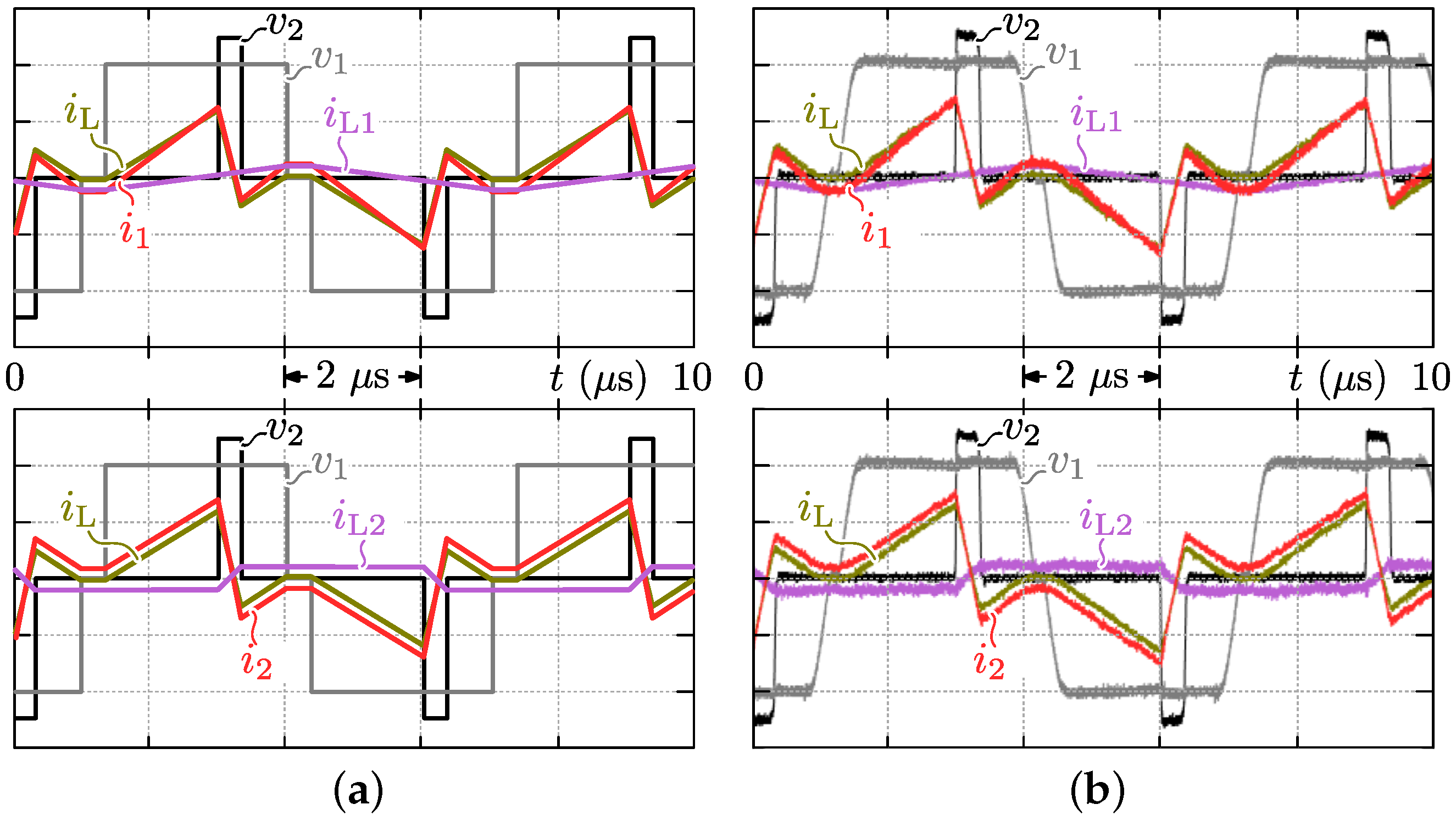
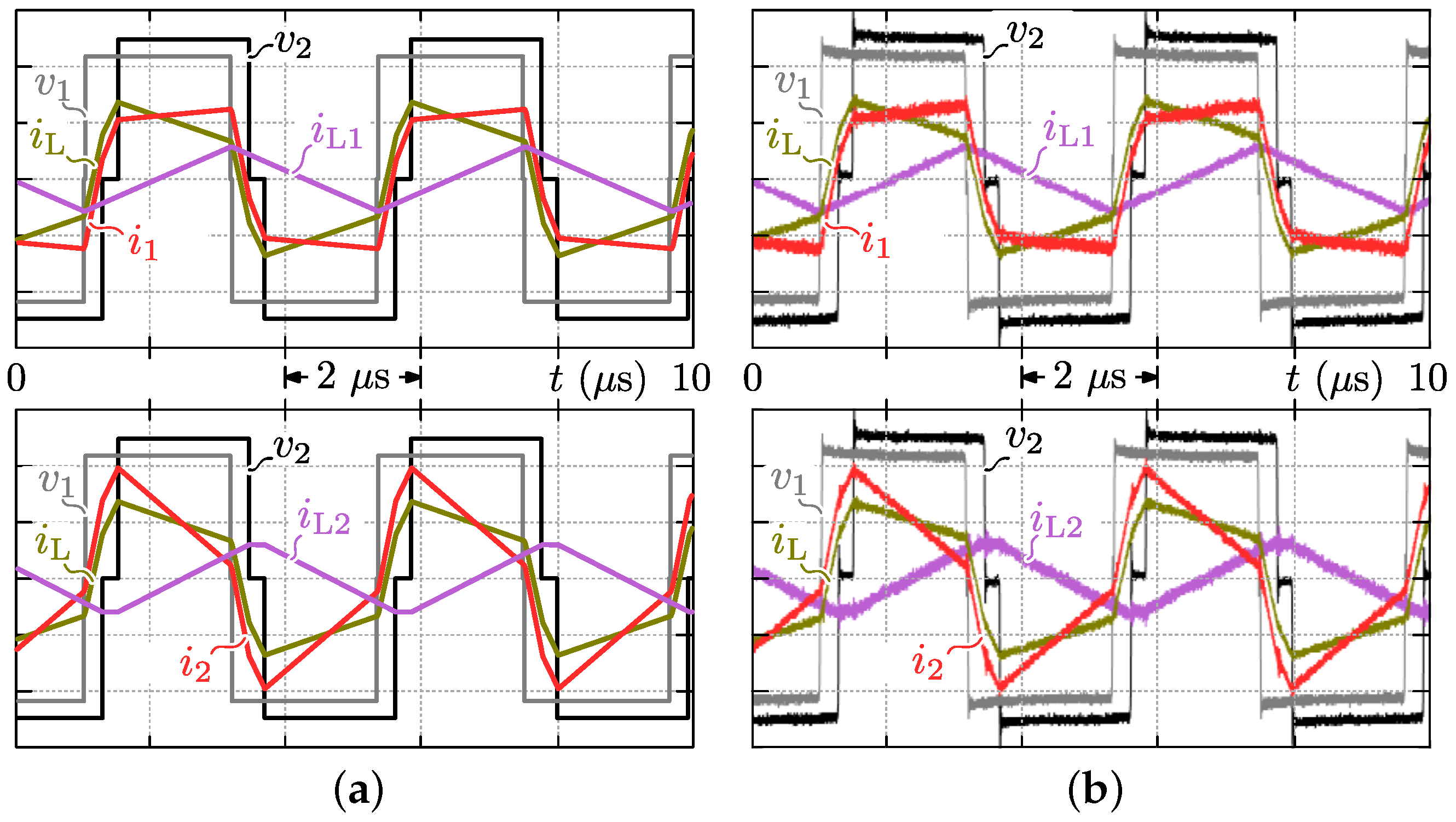
3.4. Simulation Results
4. Modeling and Optimization of the Main Functional Elements
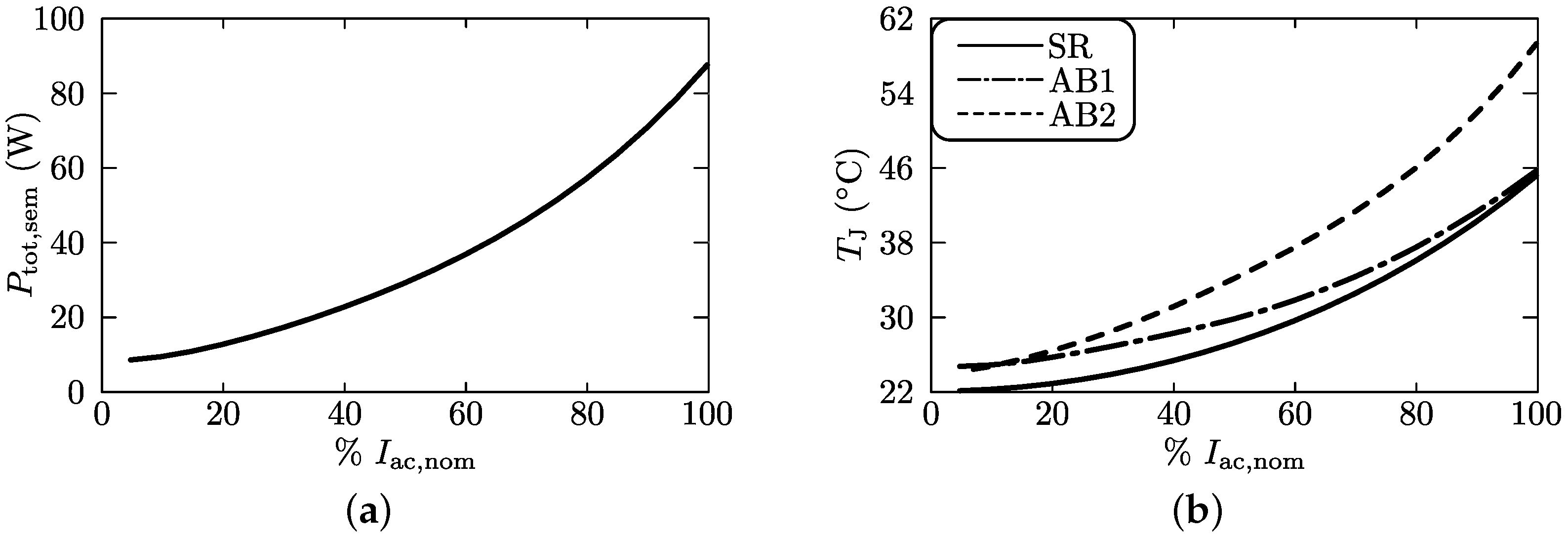
4.1. Semiconductors and Heat Sinks
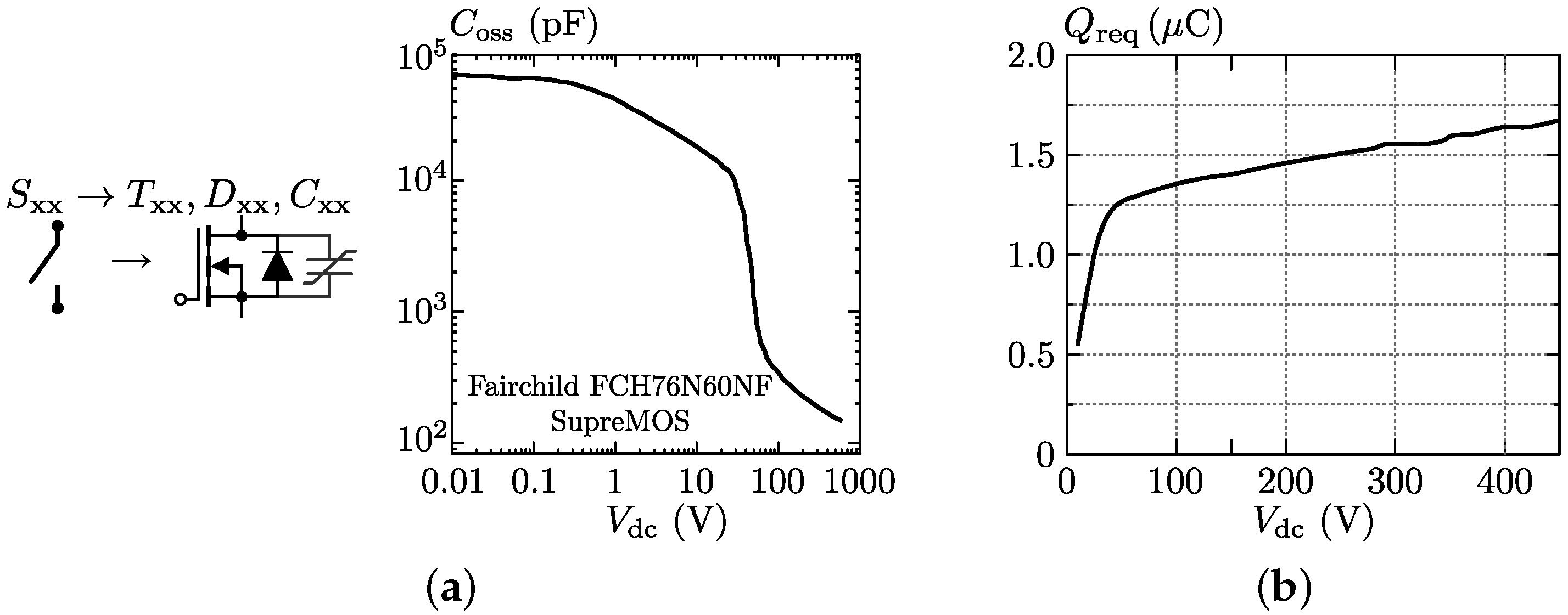
4.1.1. Semiconductor Selection
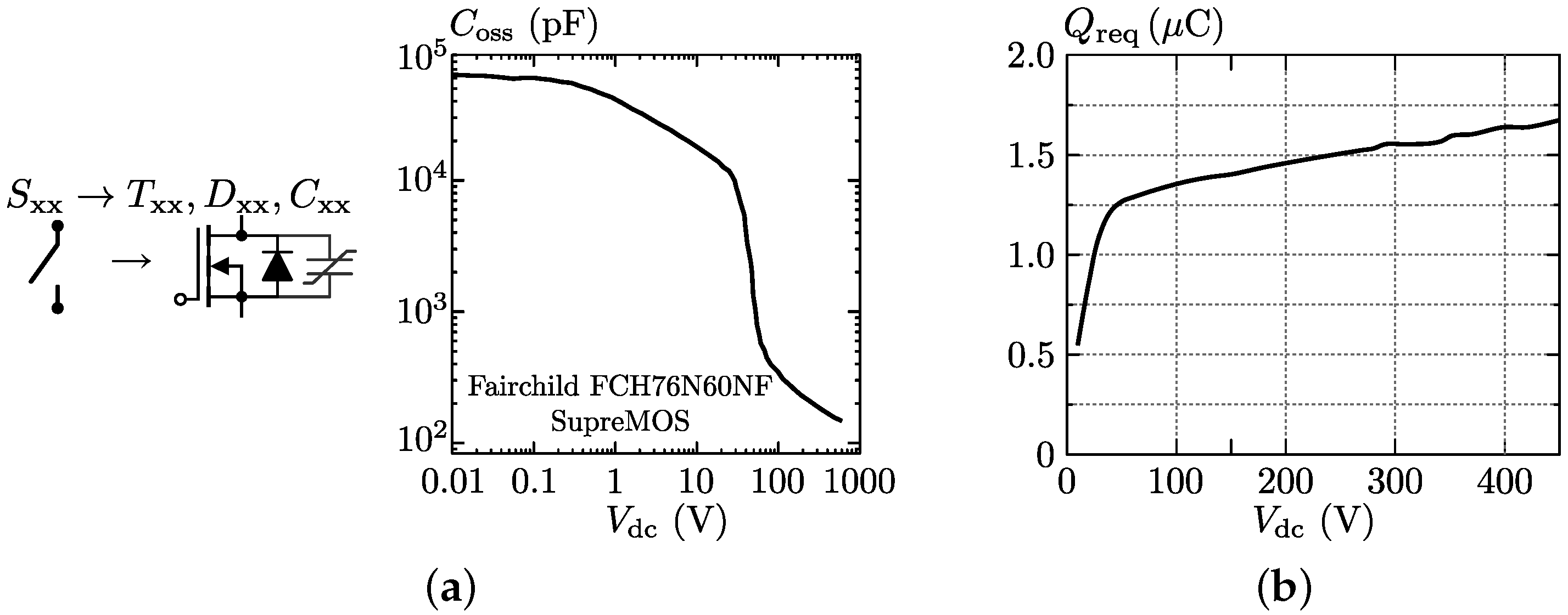
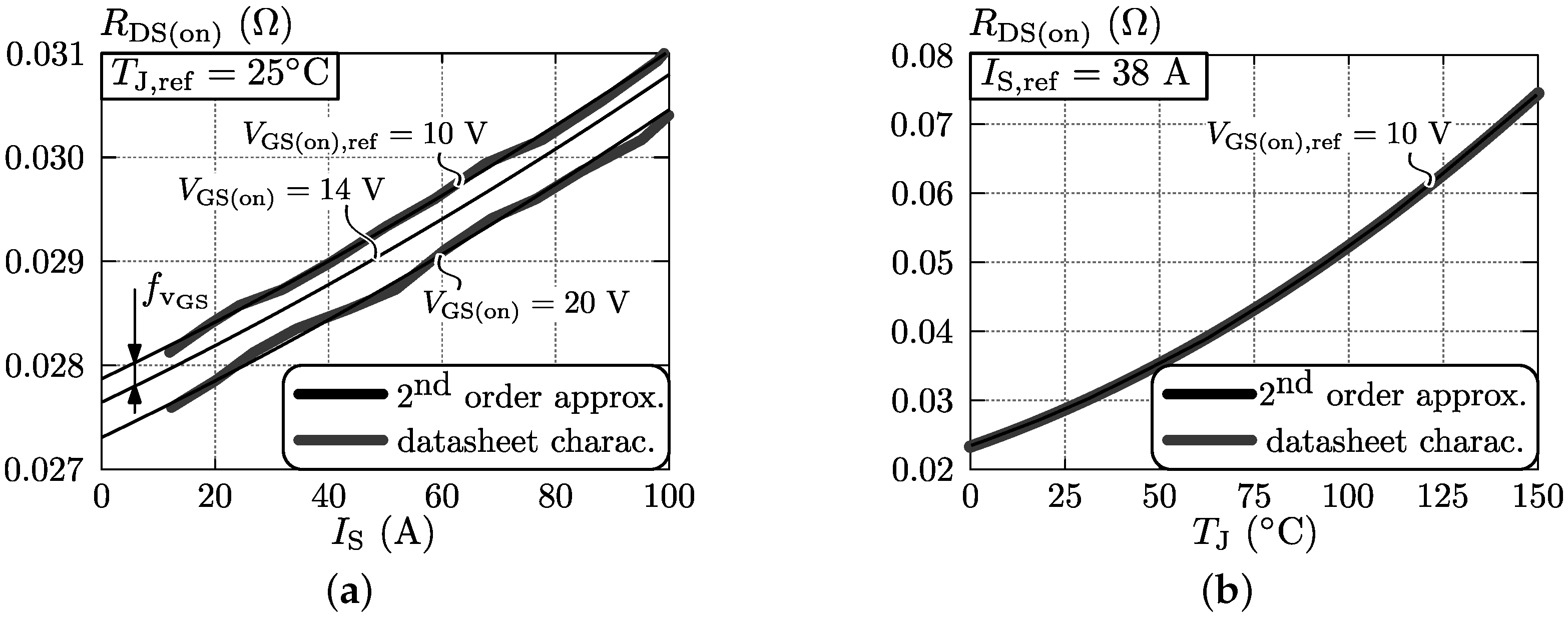
- A highly non-linear, not too big, parasitic output capacitance , enabling ZVS turn-off and turn-on. The characteristic of the FCH76N60NF MOSFETs is shown in Figure 5a;
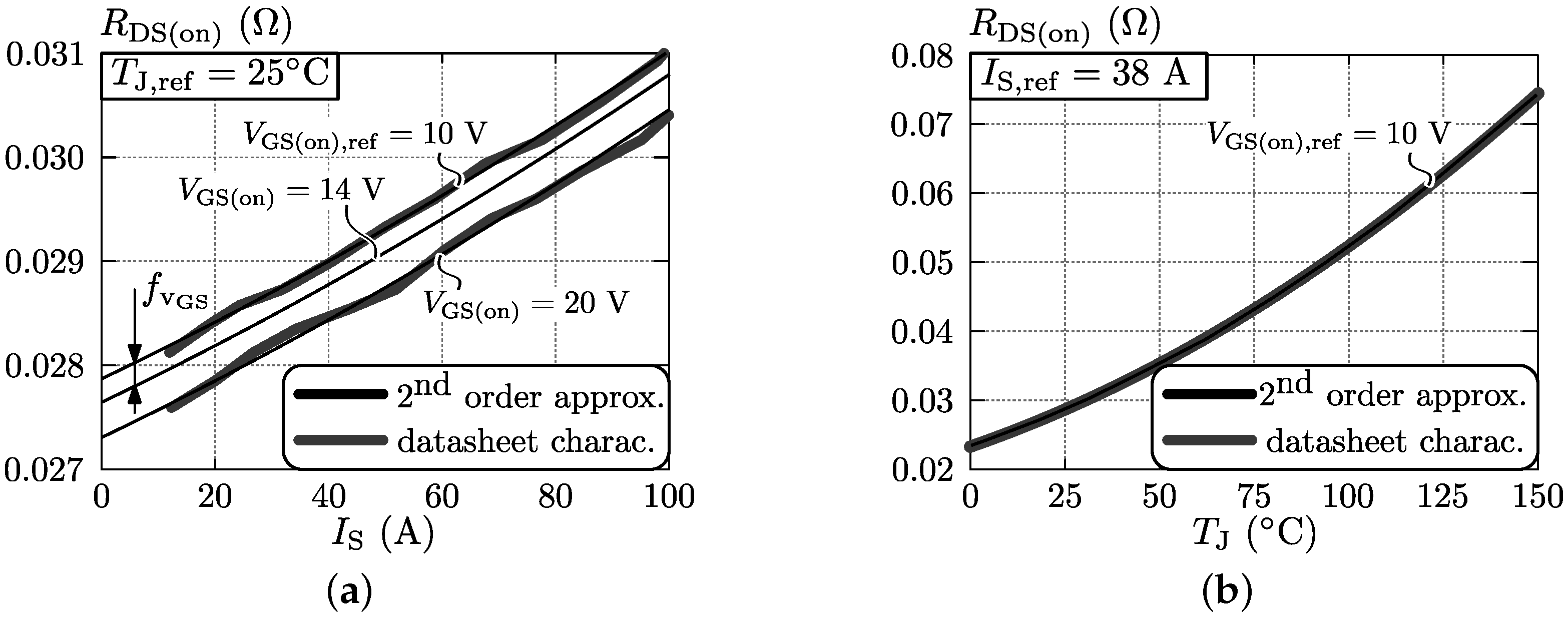
- A low drain to source on-resistance and a low junction to case thermal resistance , being beneficial regarding the DAB’s conduction losses;
- A low total gate charge , leading to reduced turn-on and turn-off times, improved ZVS behavior (fast turn-off) [32], and reduced gate drive losses;
- An integrated fast body diode with low reverse recovery charge and low reverse recovery time , ensuring that all the energy will timely leave the transistor after a ZVS commutation.
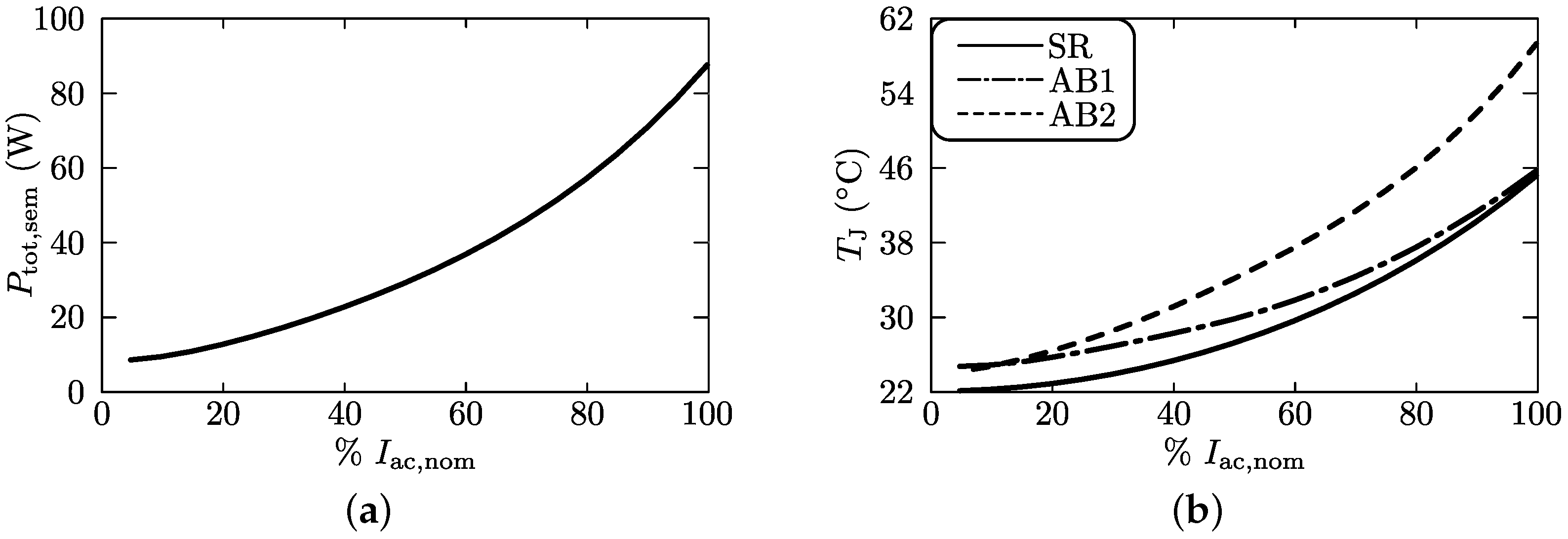
4.1.2. Loss Models
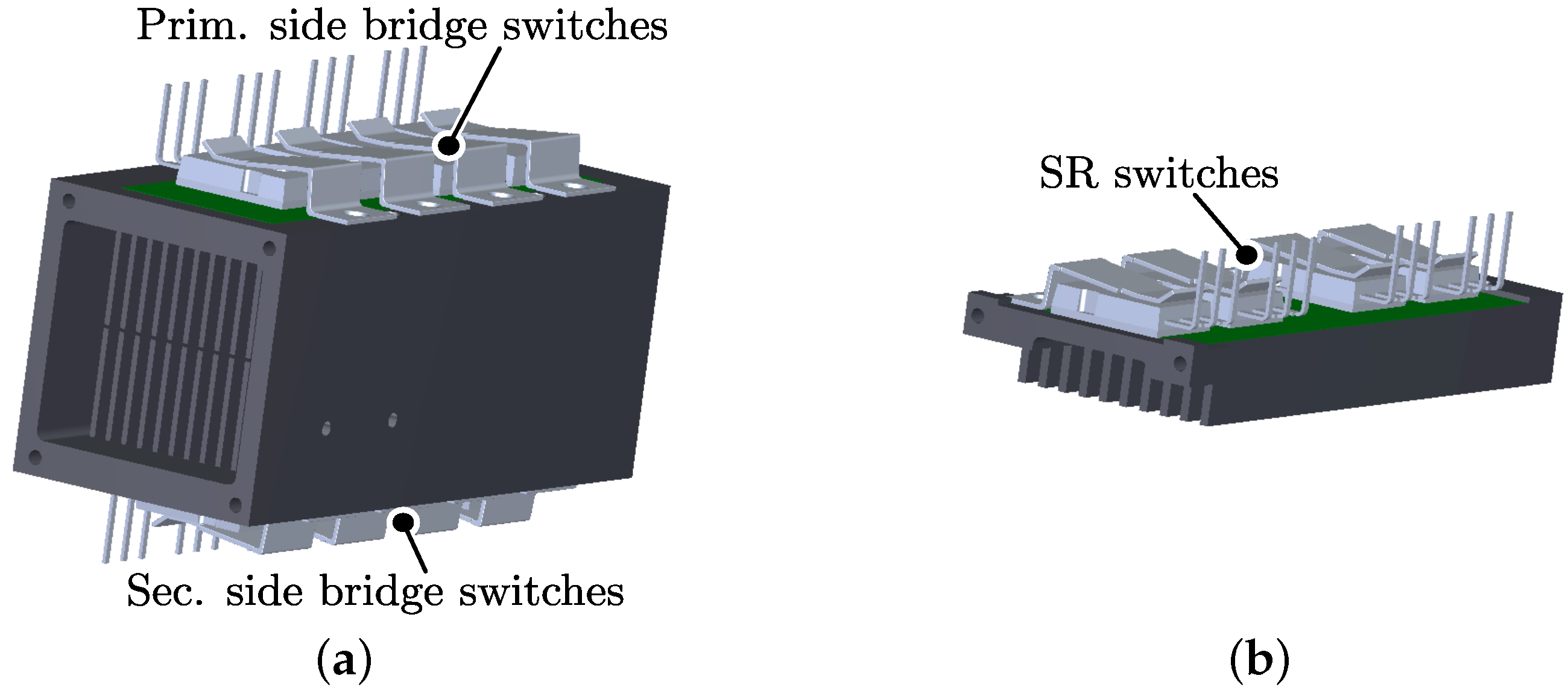
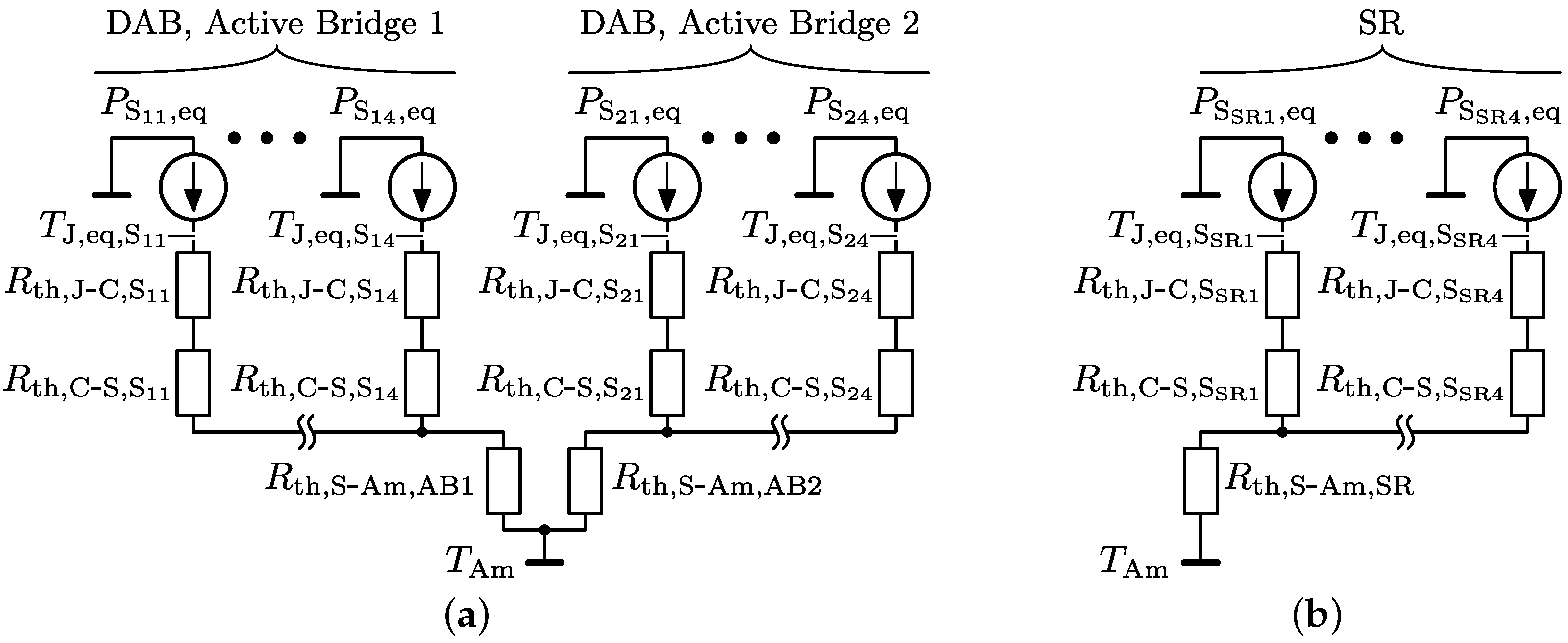
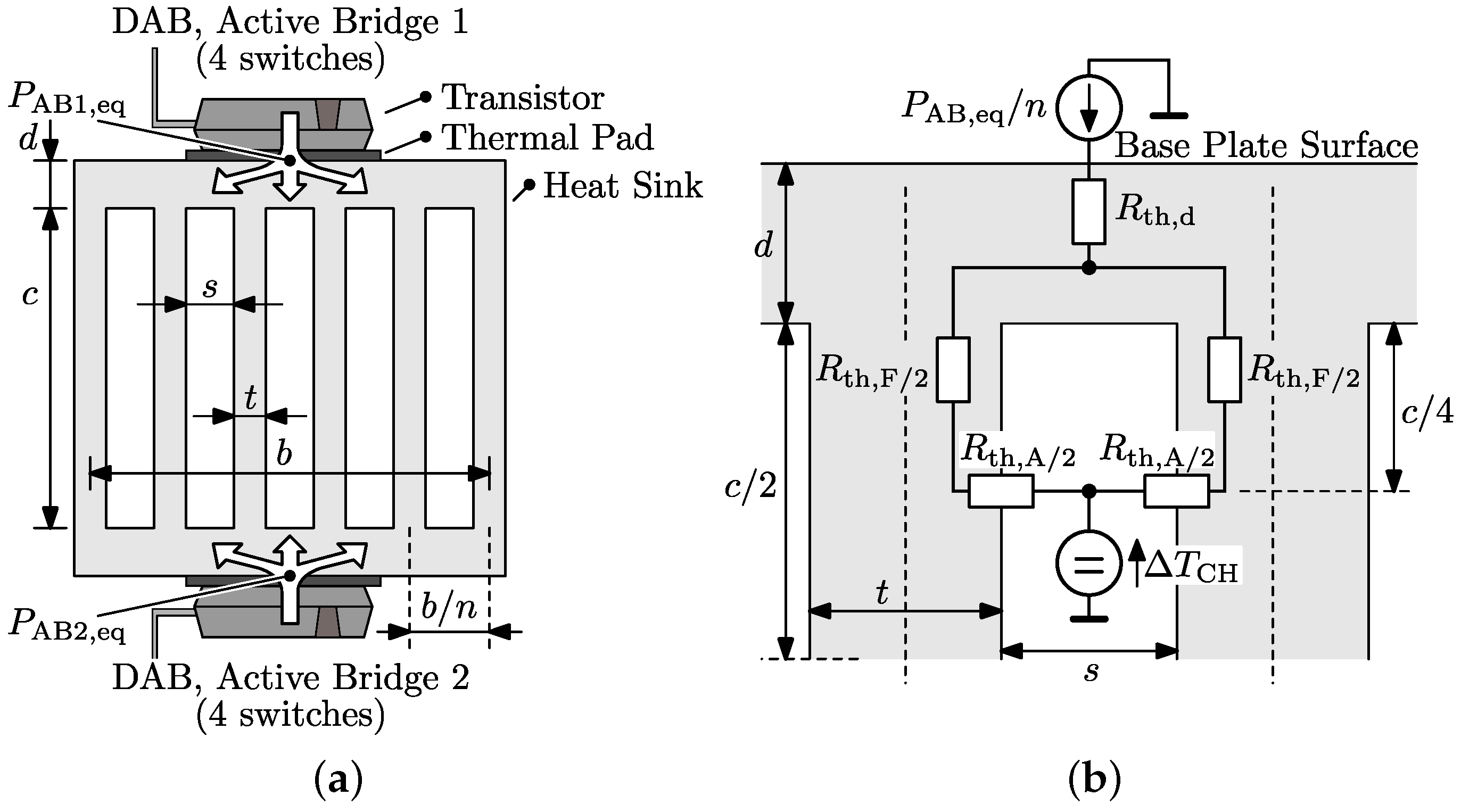
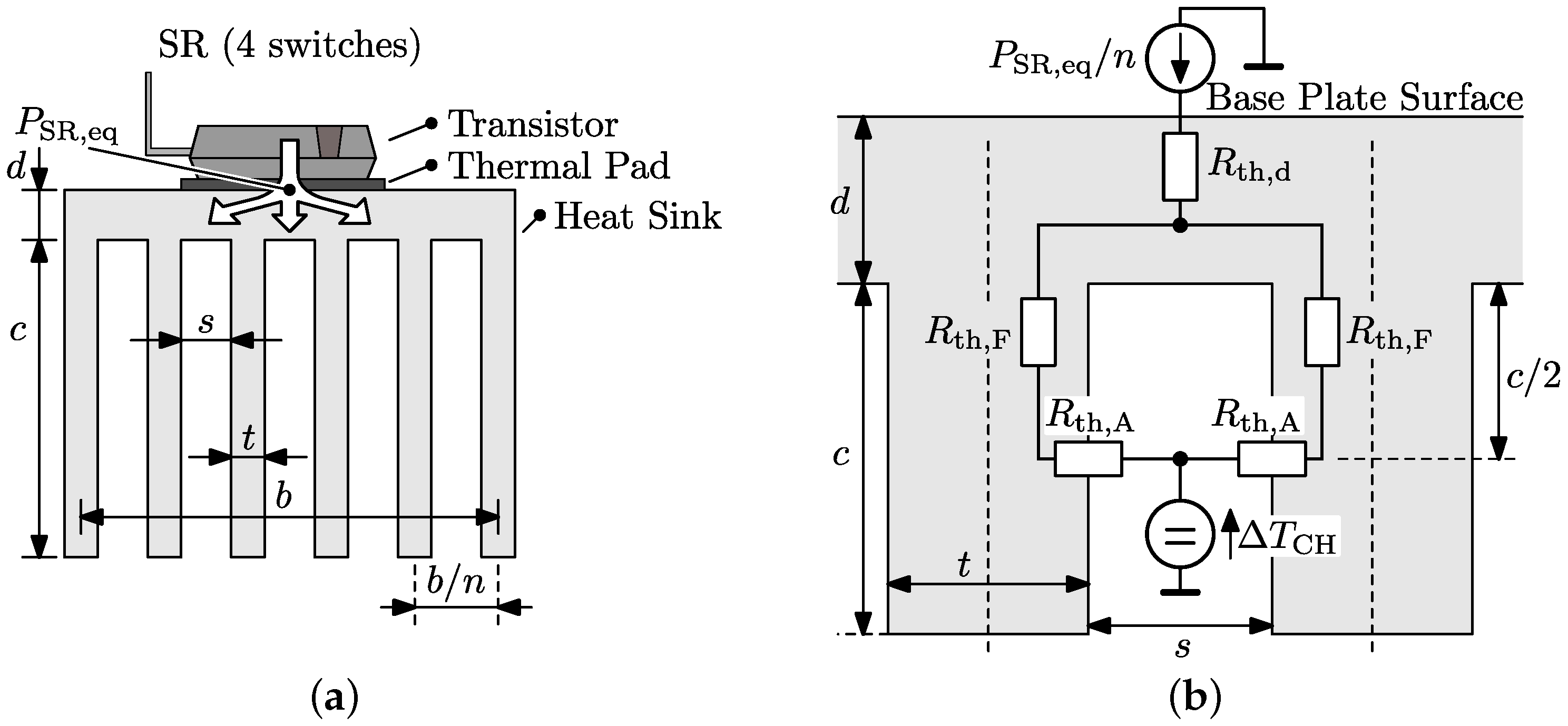
4.1.3. Heat Sink Assembly and Thermal Network Model
- are the junction to case thermal resistances of the switches;
- are the thermal resistances of the thermal pads (the Hi-Flow 300P thermal pads from Bergquist are used for all switches).;
- and (=) are the total thermal resistances between the surface of the heat sink (i.e., seen from one base plate) to the ambient, for the heat sink of the DAB;
- is the total thermal resistance between the surface of the heat sink (i.e., the surface of the base plate) to the ambient, for the heat sink of the SR.
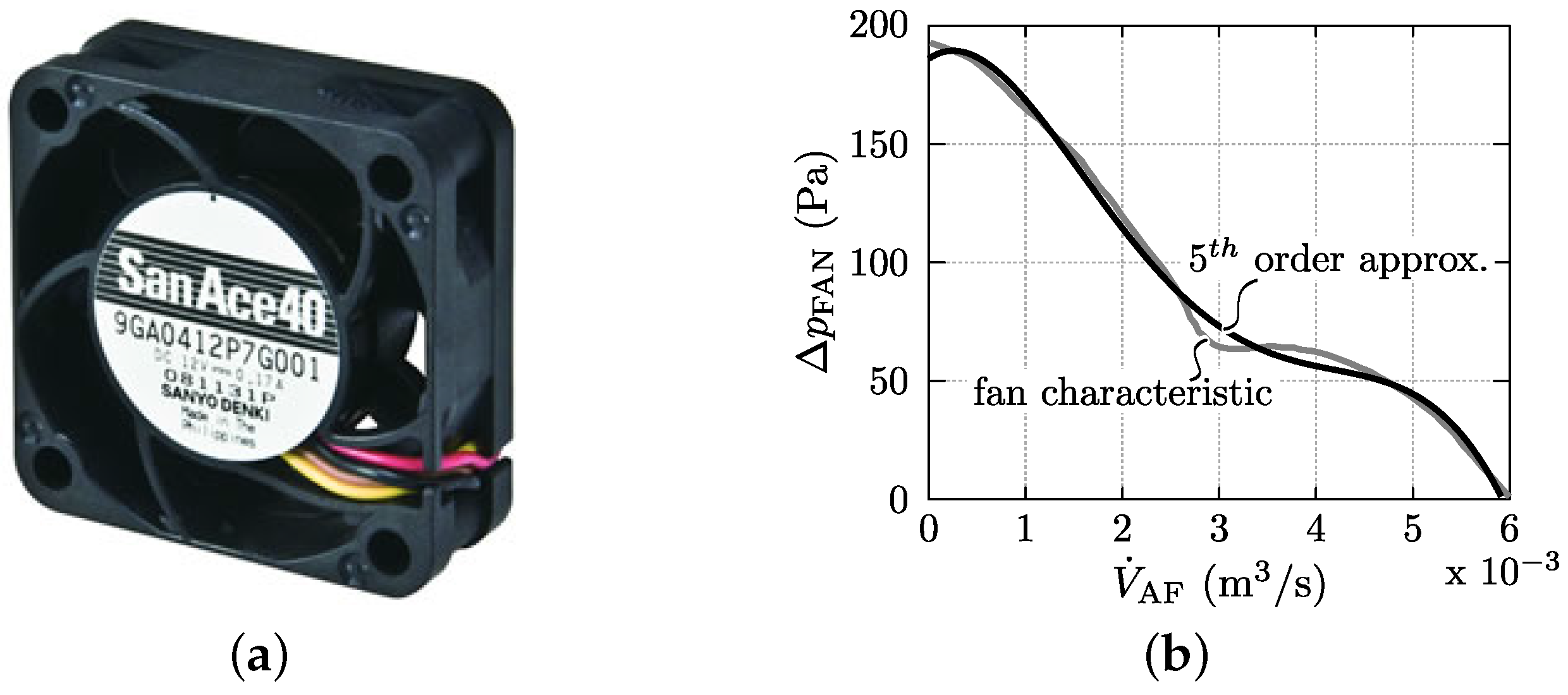
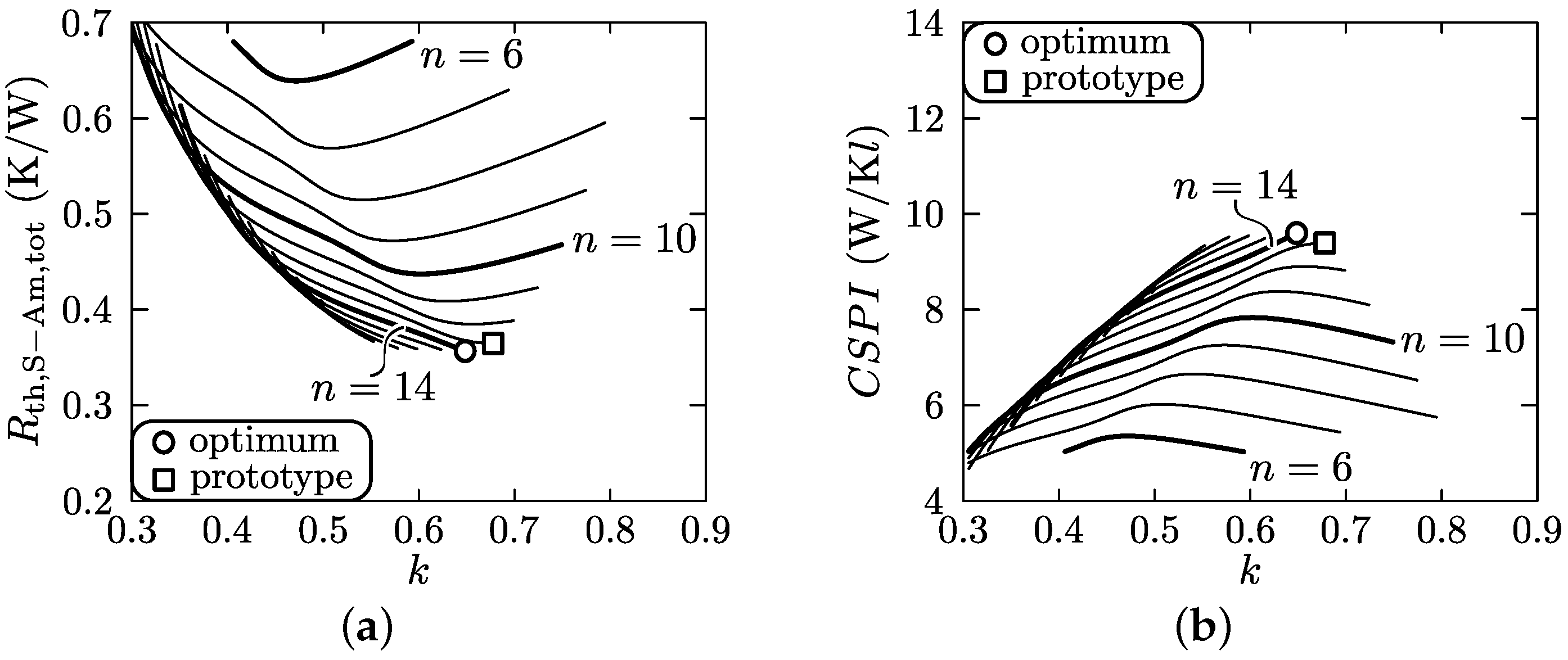
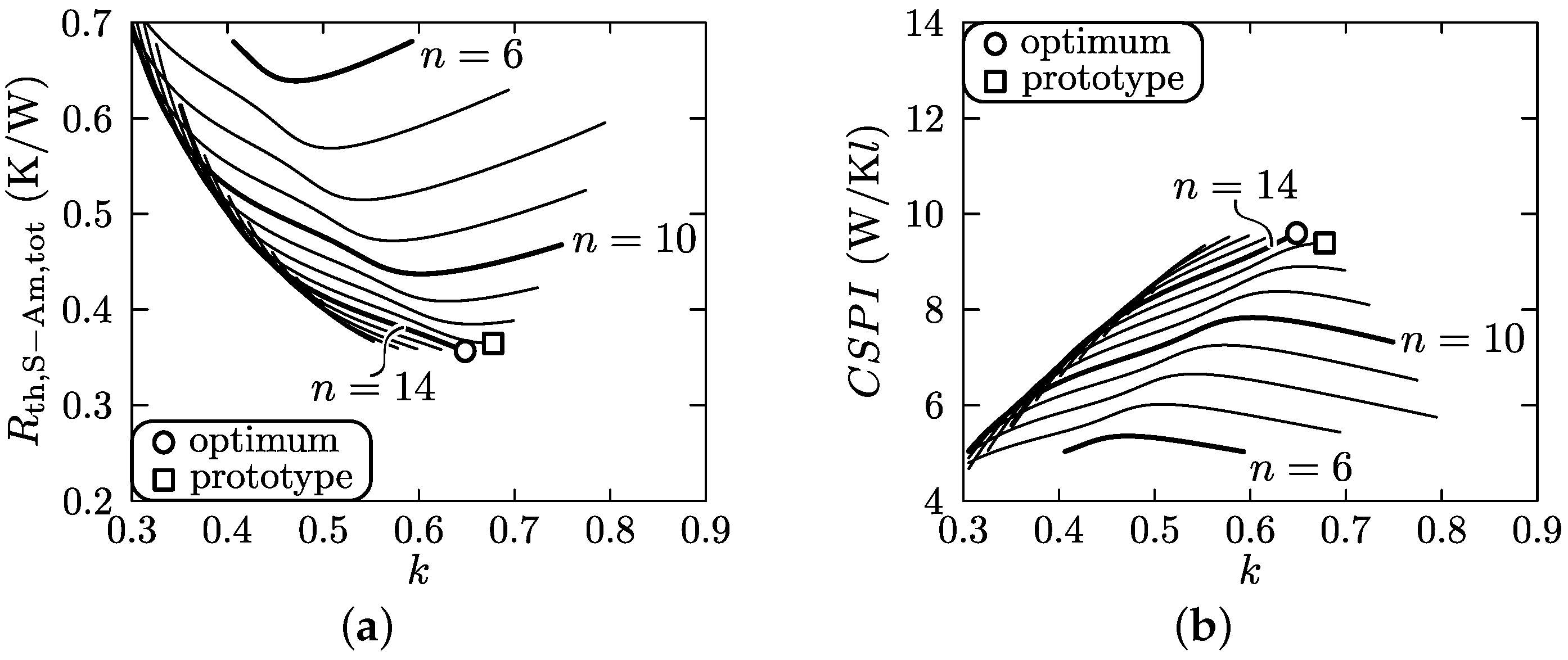
4.1.4. Heat Sink Optimization
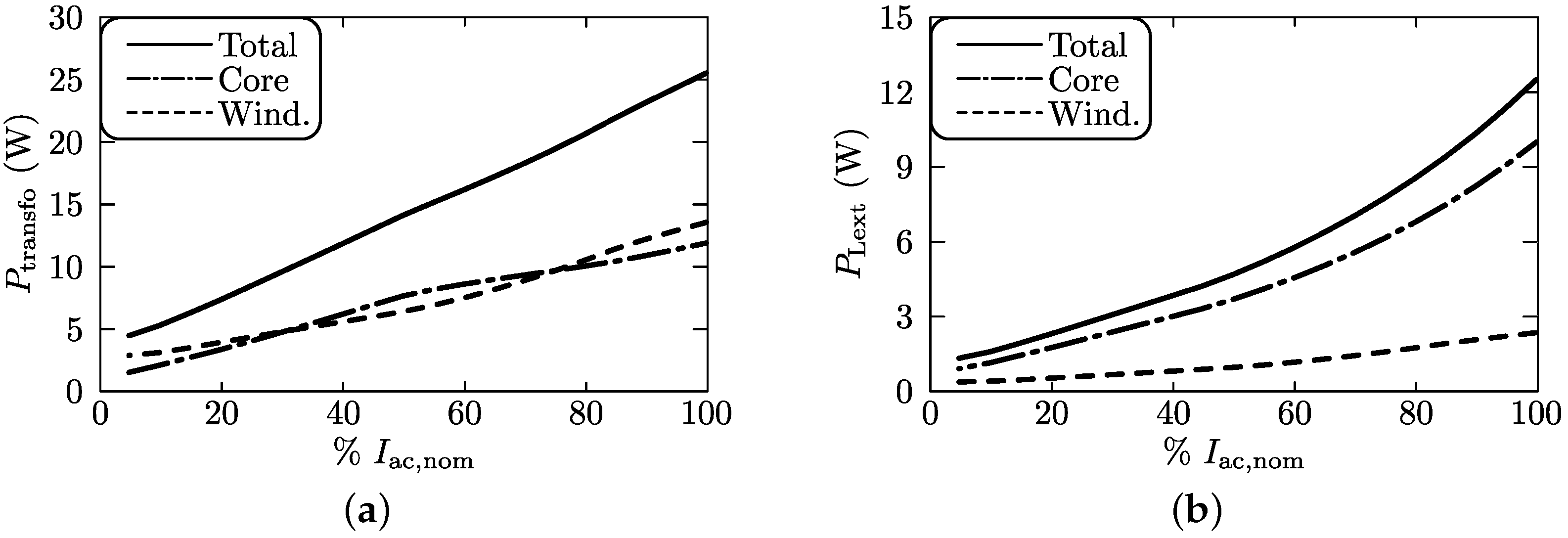
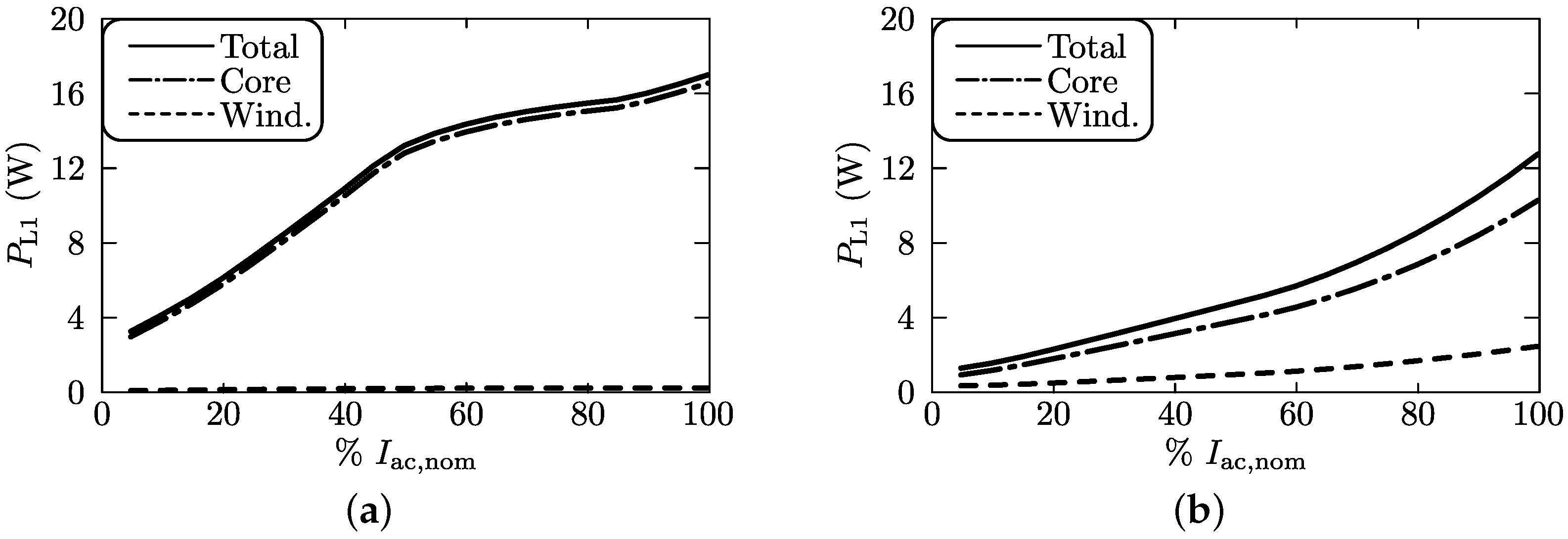
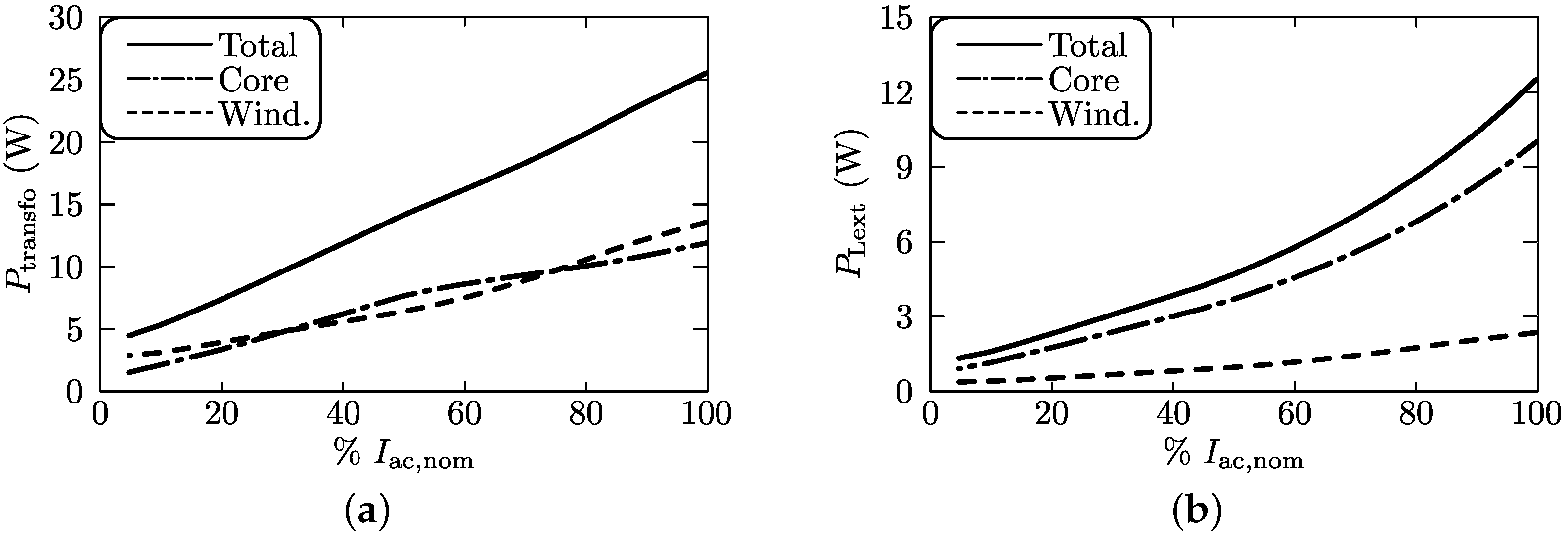
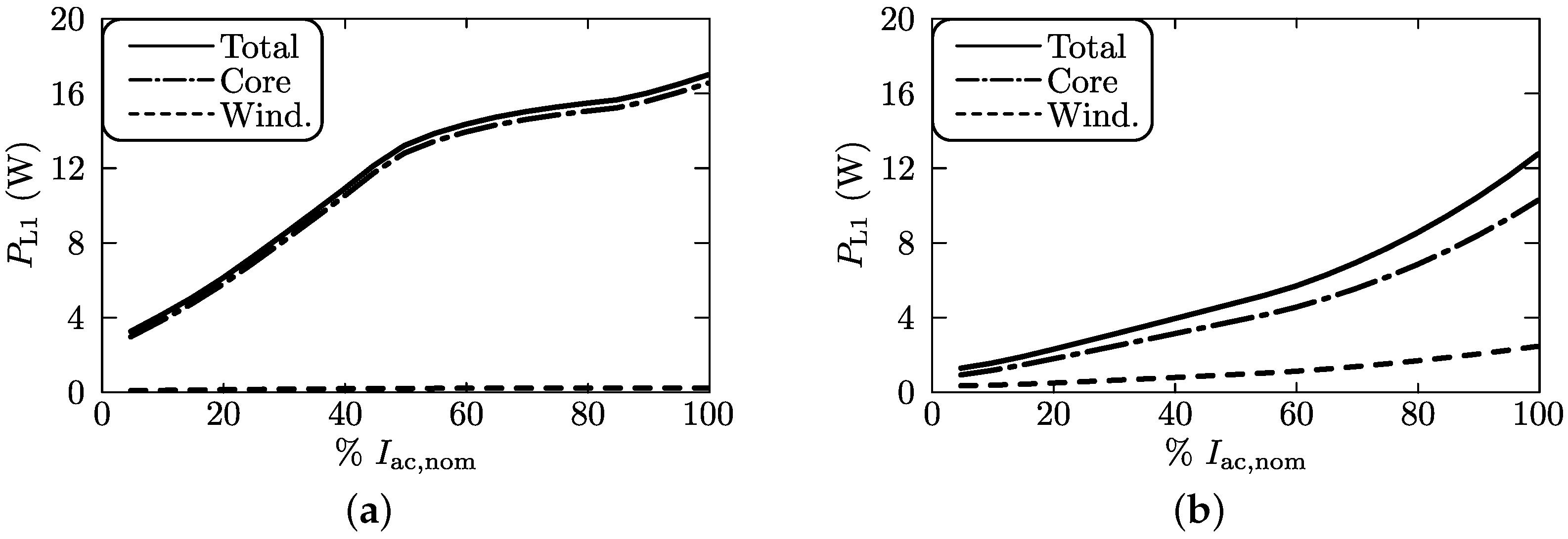
4.2. Magnetic Elements of the DAB: Inductors and Transformer
4.2.1. Design and Optimization Procedure
4.2.2. Loss Models
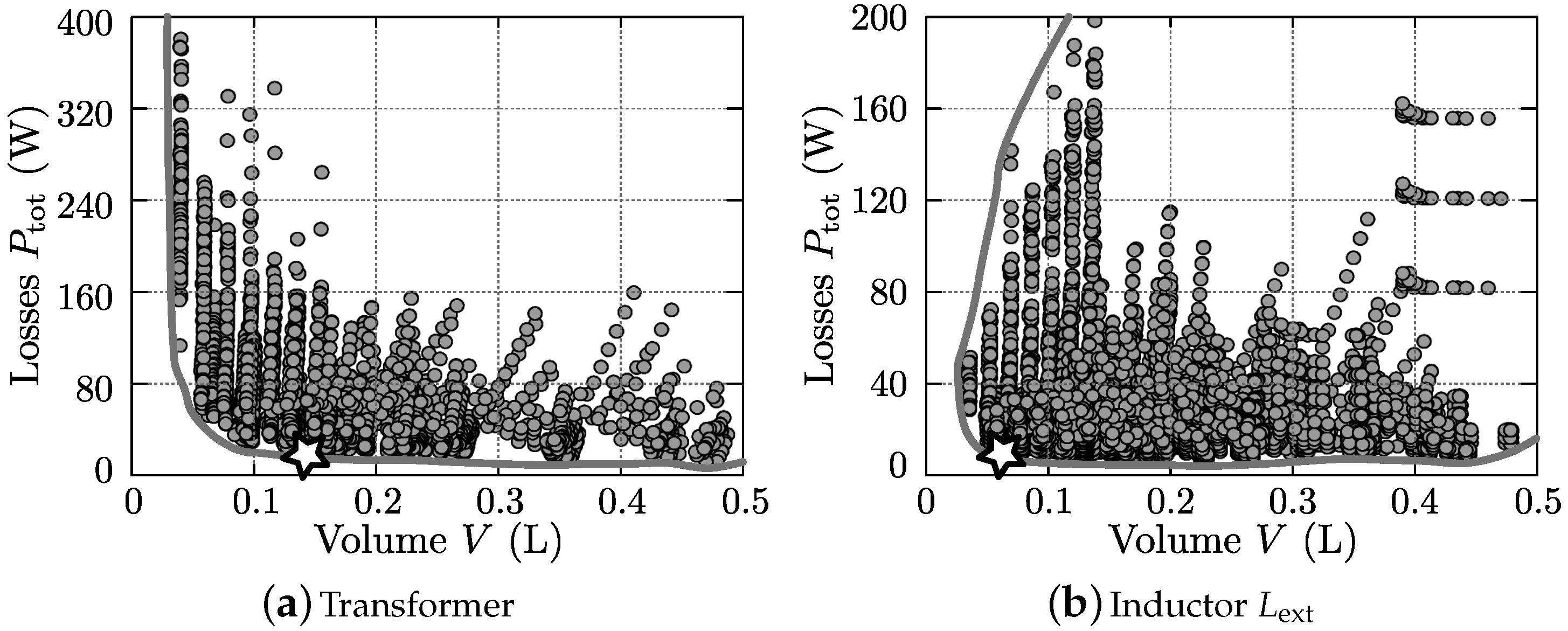
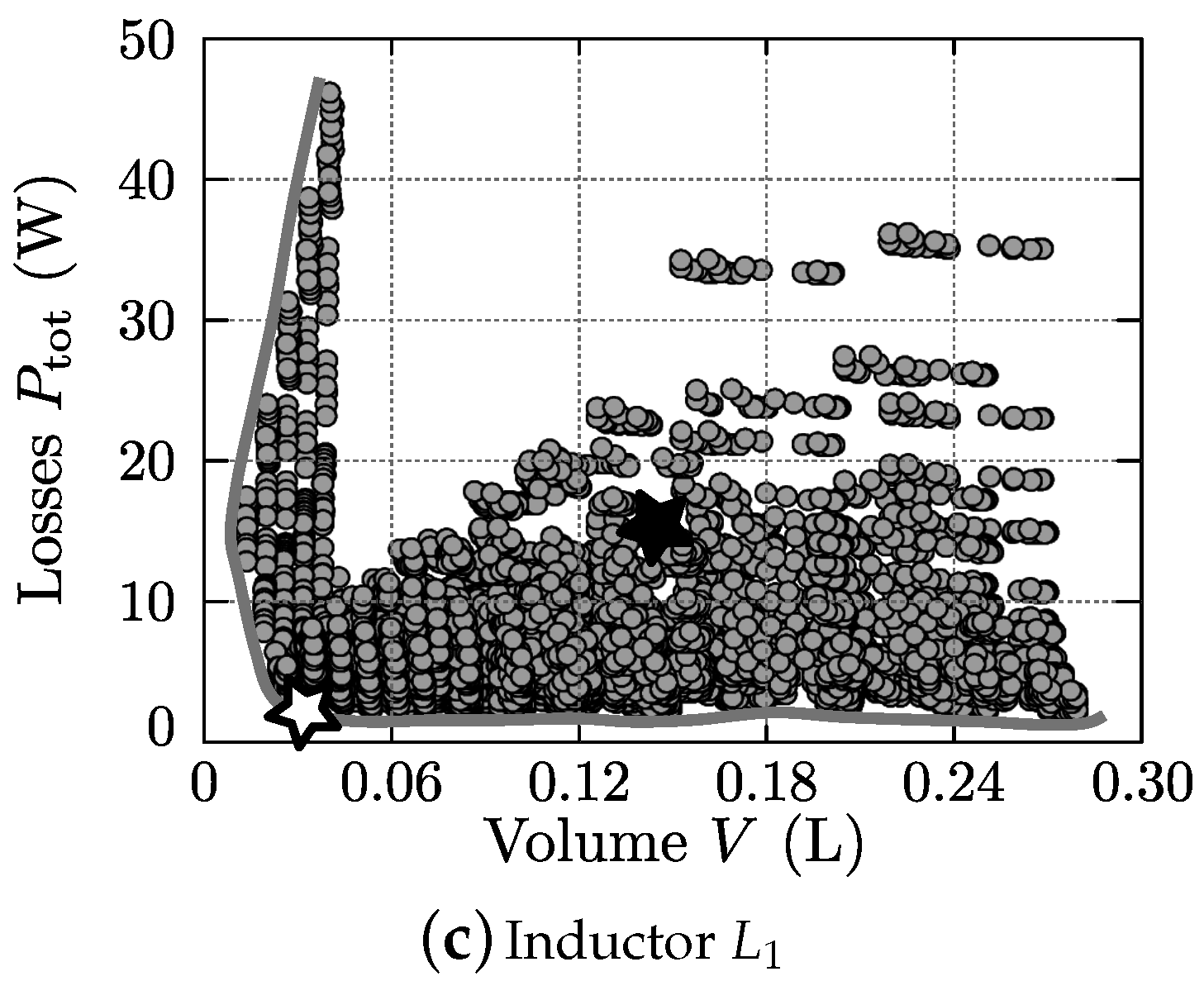
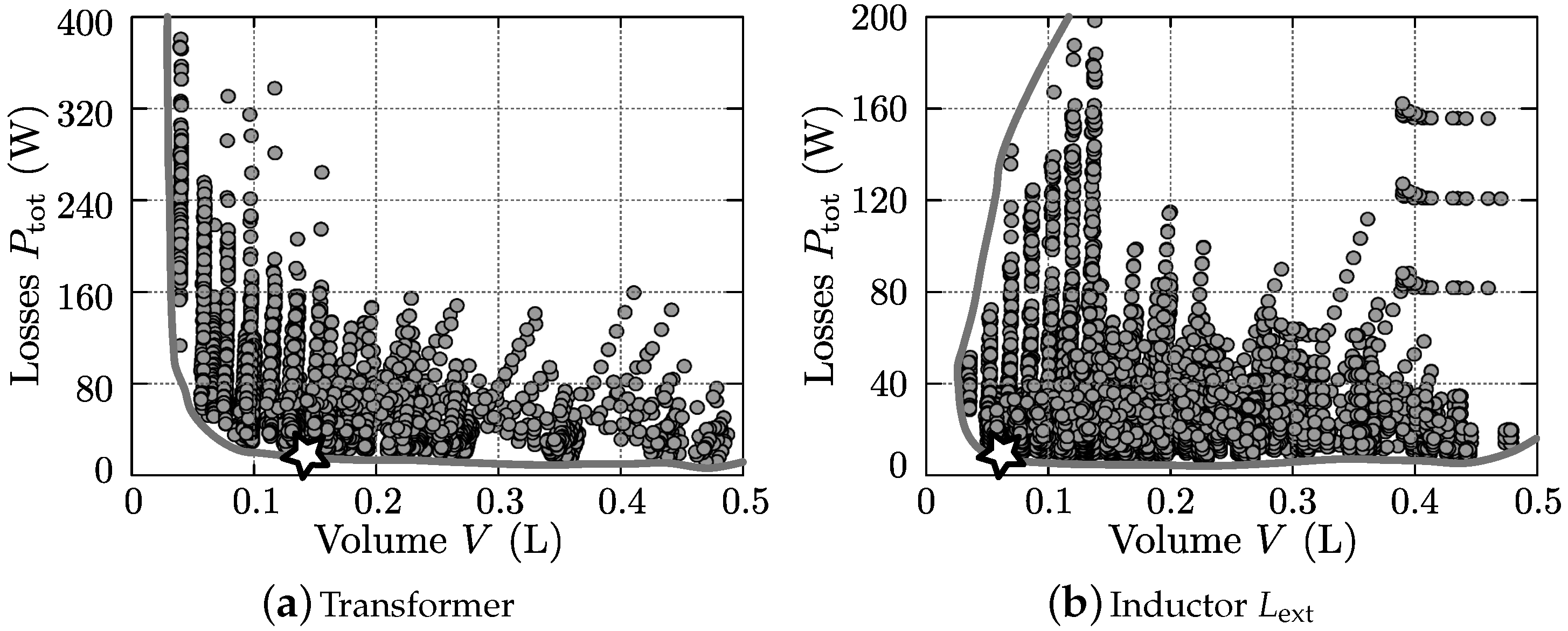
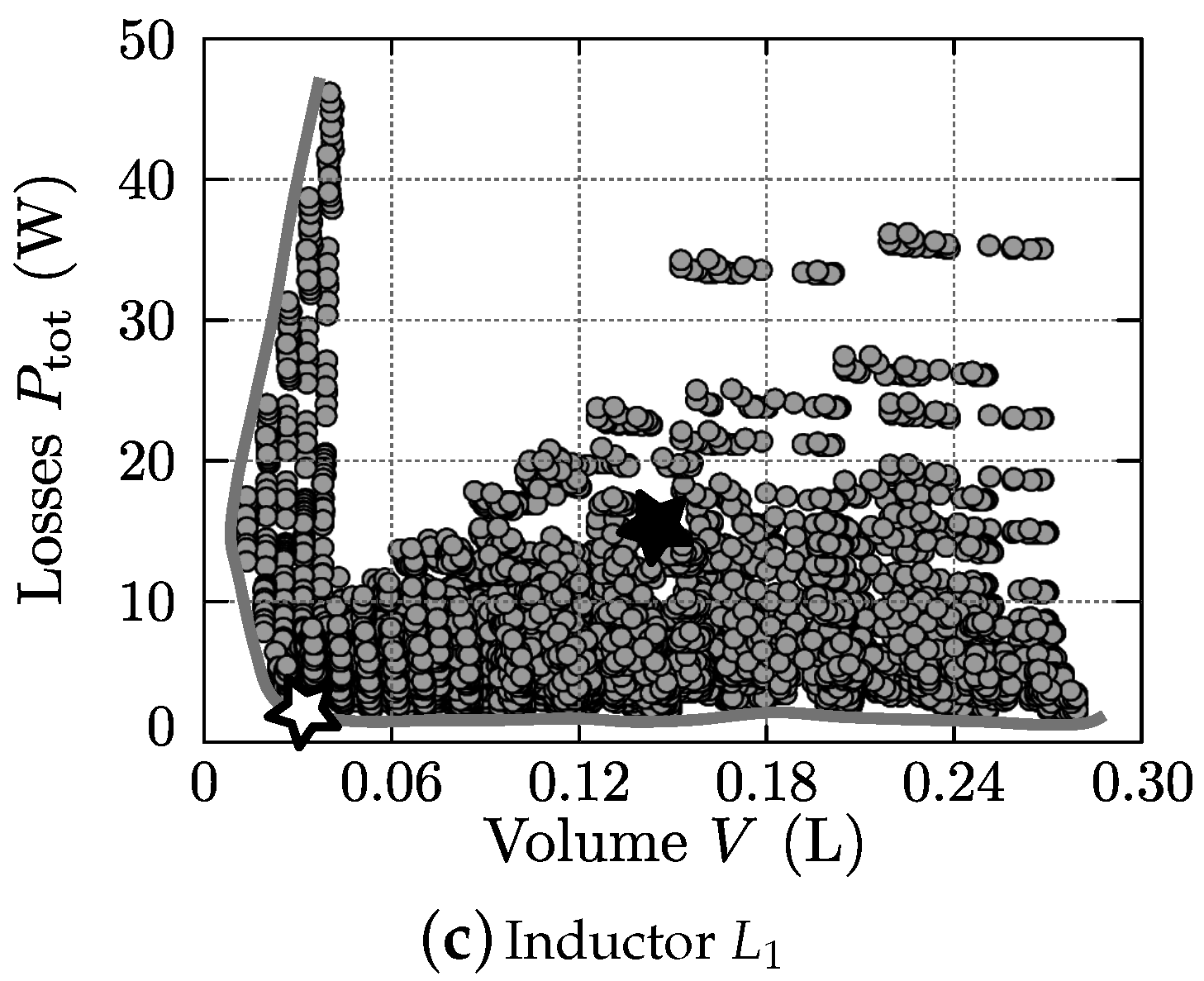
4.2.3. Optimization Results
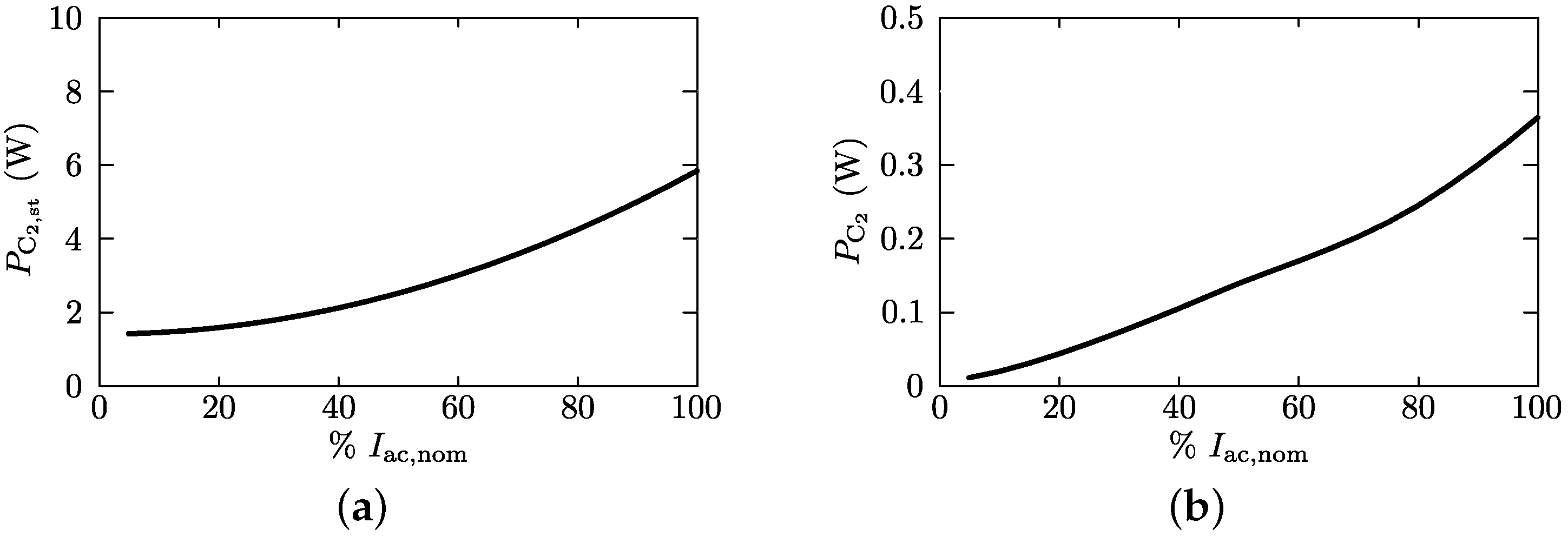
4.3. Output Filter Capacitors
4.3.1. Low-Frequency (LF) Output Filter Capacitors
4.3.2. High-Frequency (HF) Output Filter Capacitors
4.3.3. Capacitor Losses
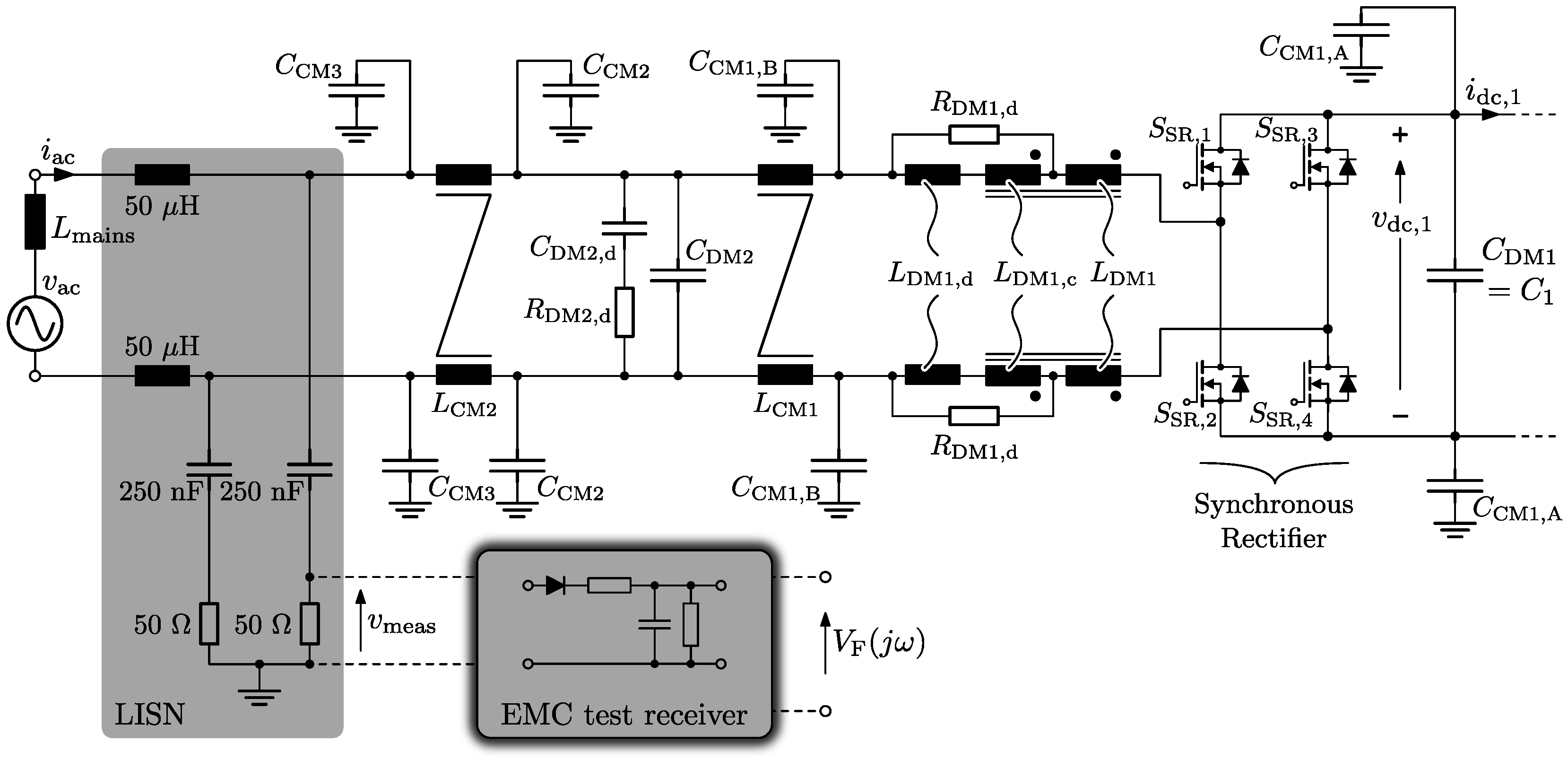
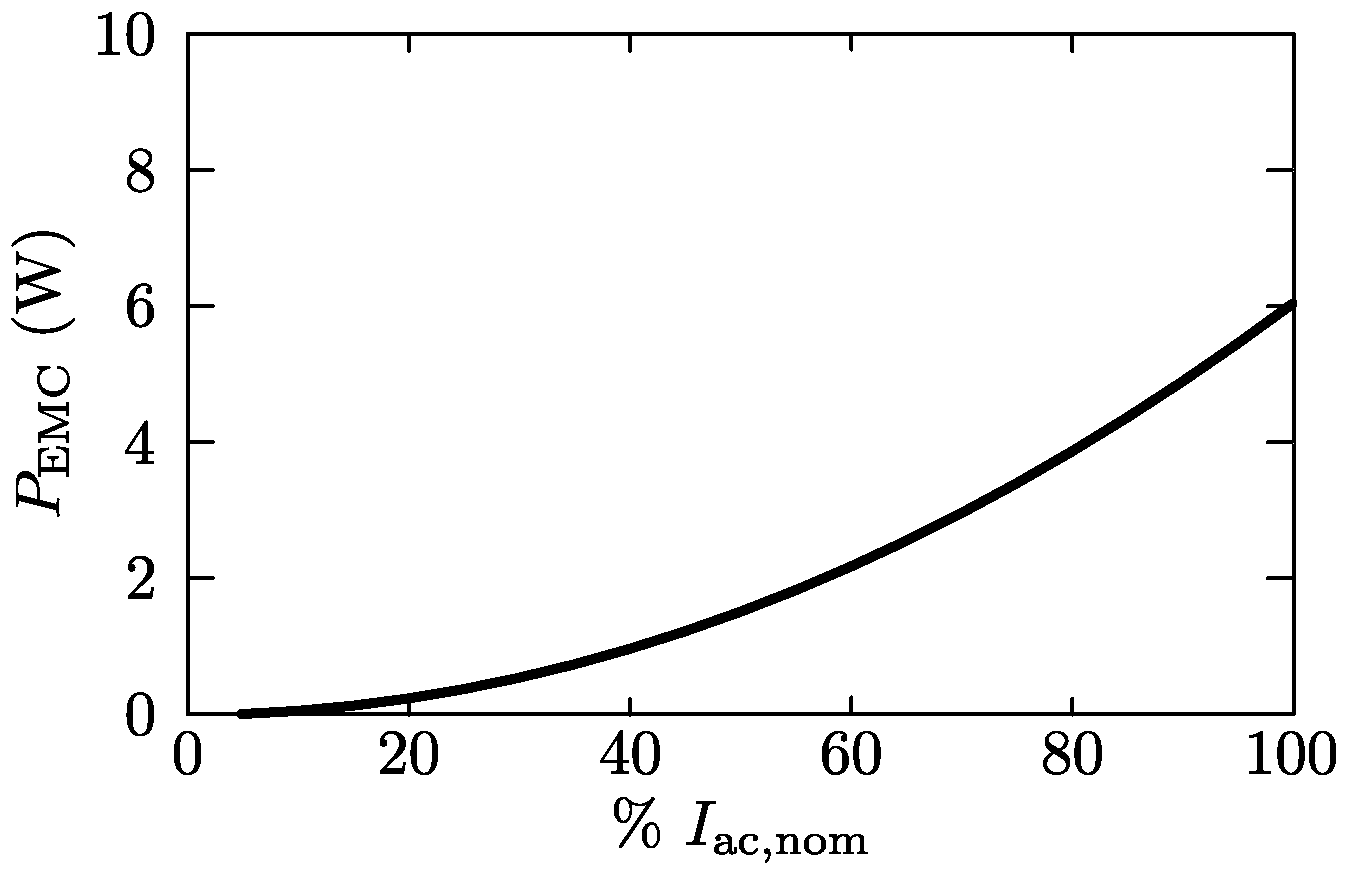
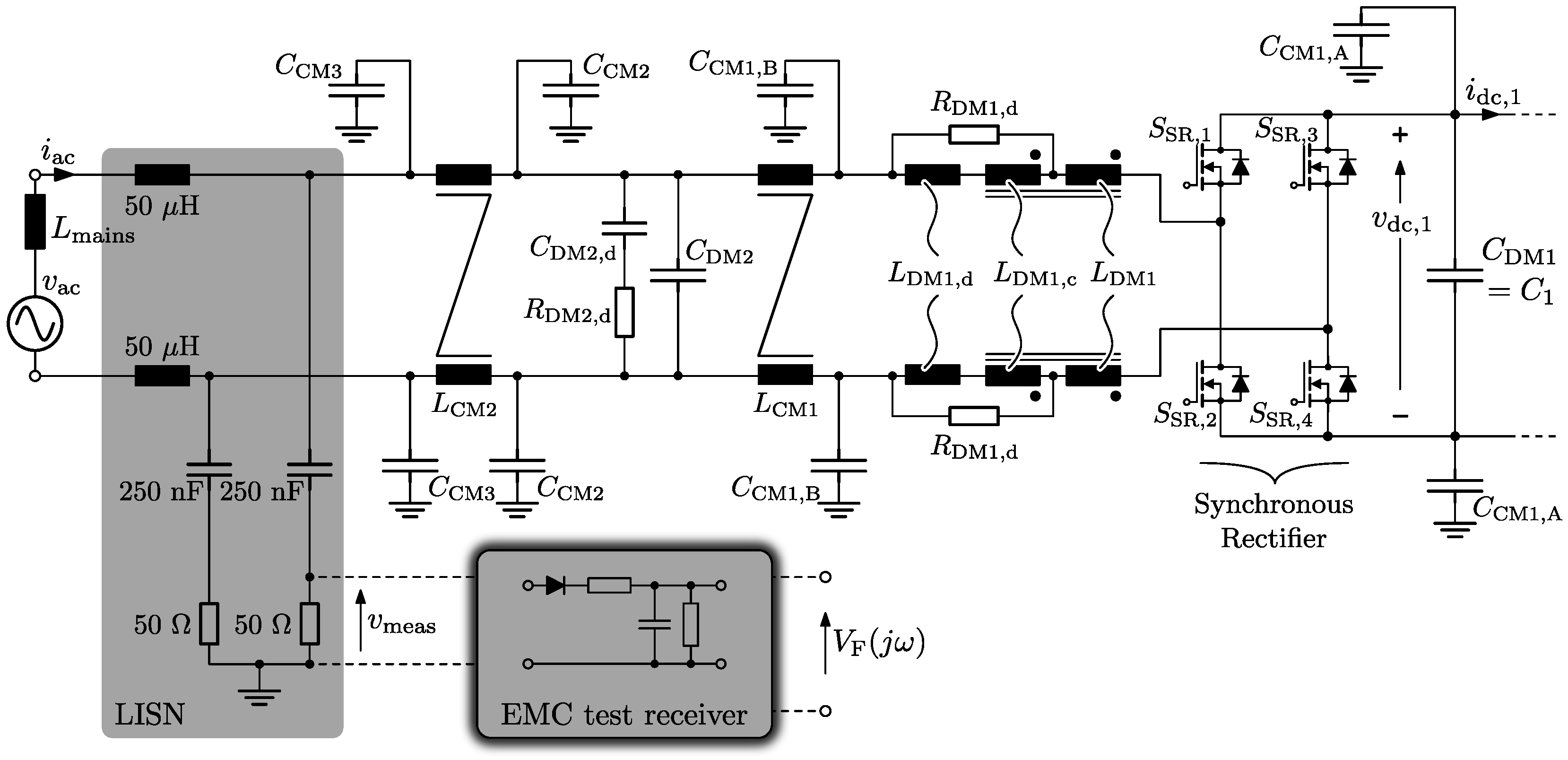
4.4. Electromagnetic Compatibility (EMC) Input Filter
4.4.1. Differential Mode (DM) Filter Design
4.4.2. Common Mode (CM) Filter Design
4.4.3. EMC Filter Losses and Volume
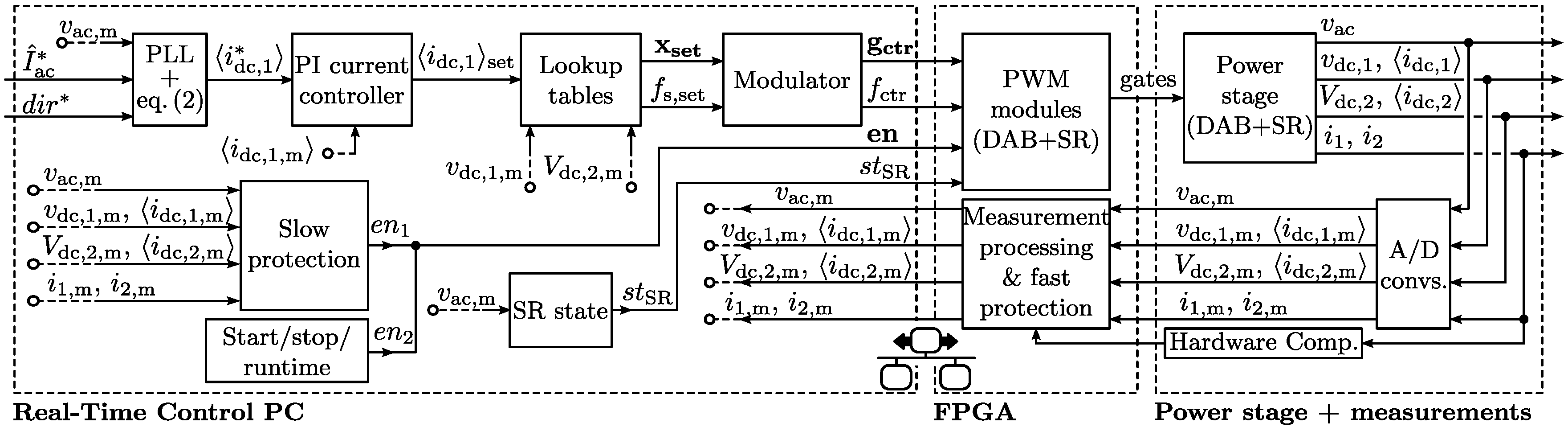
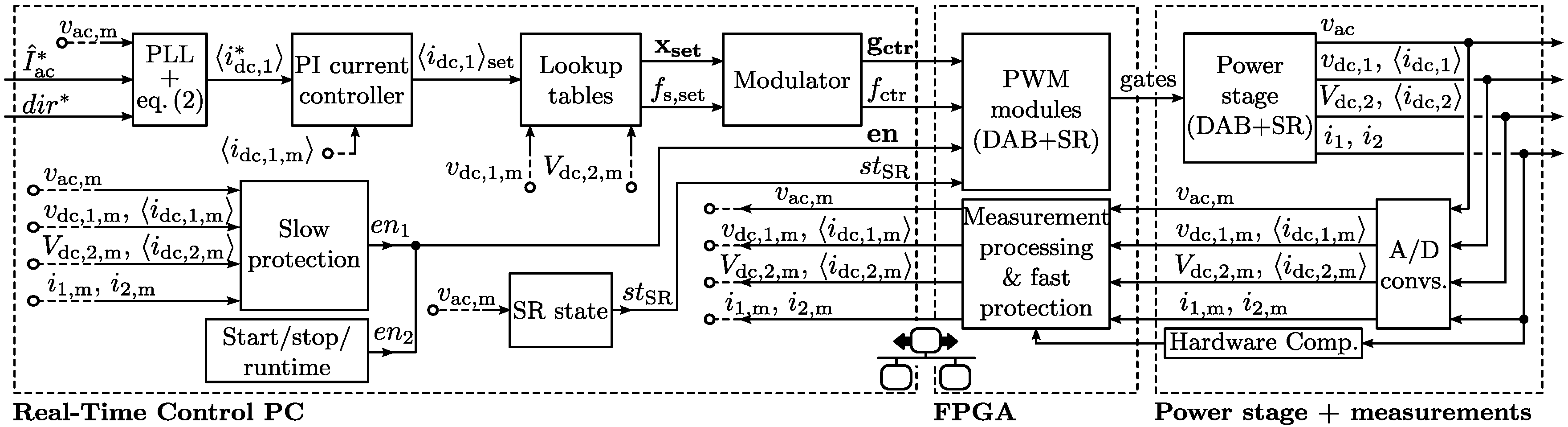
4.4.4. Implementation of the Controller
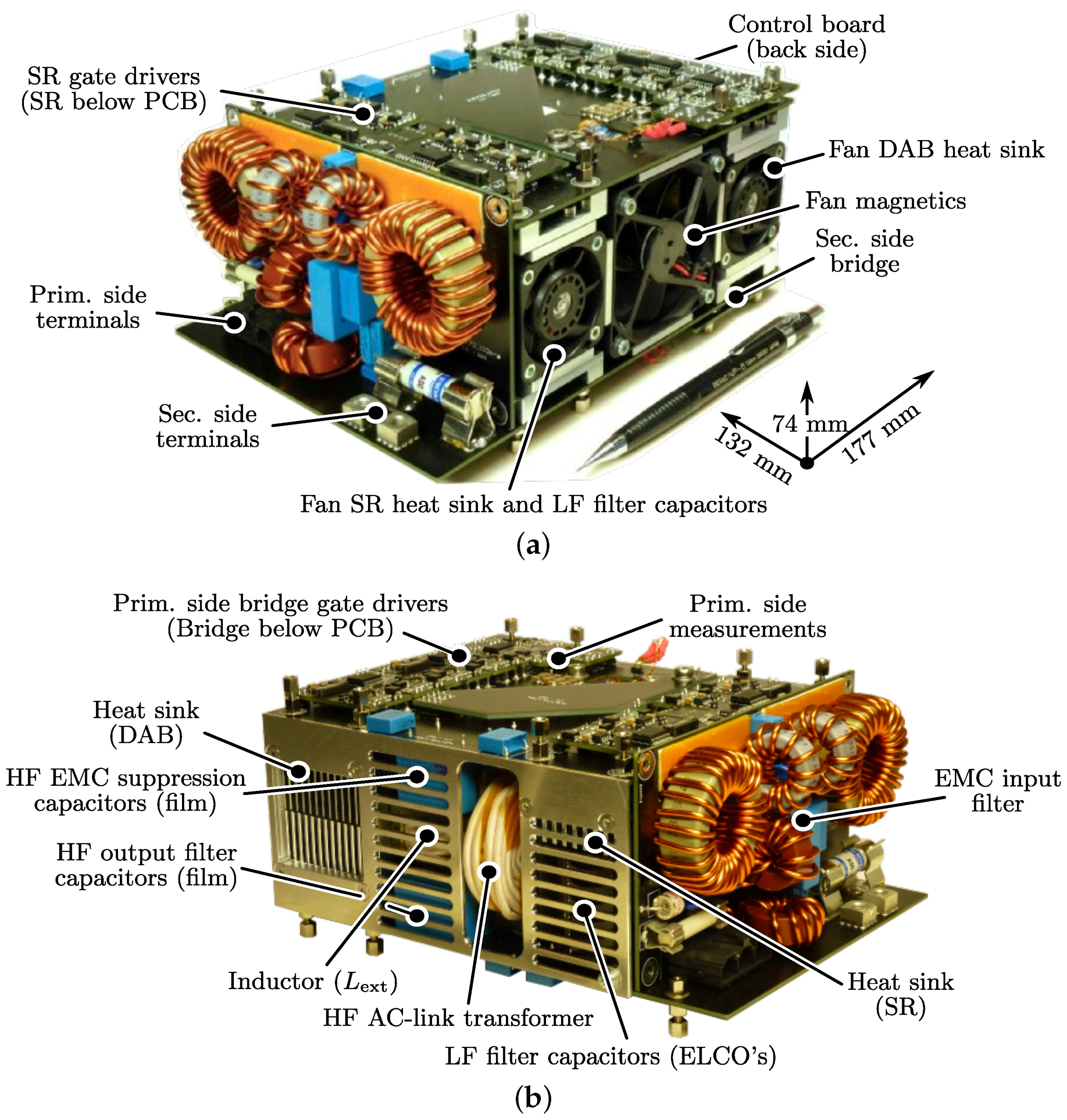
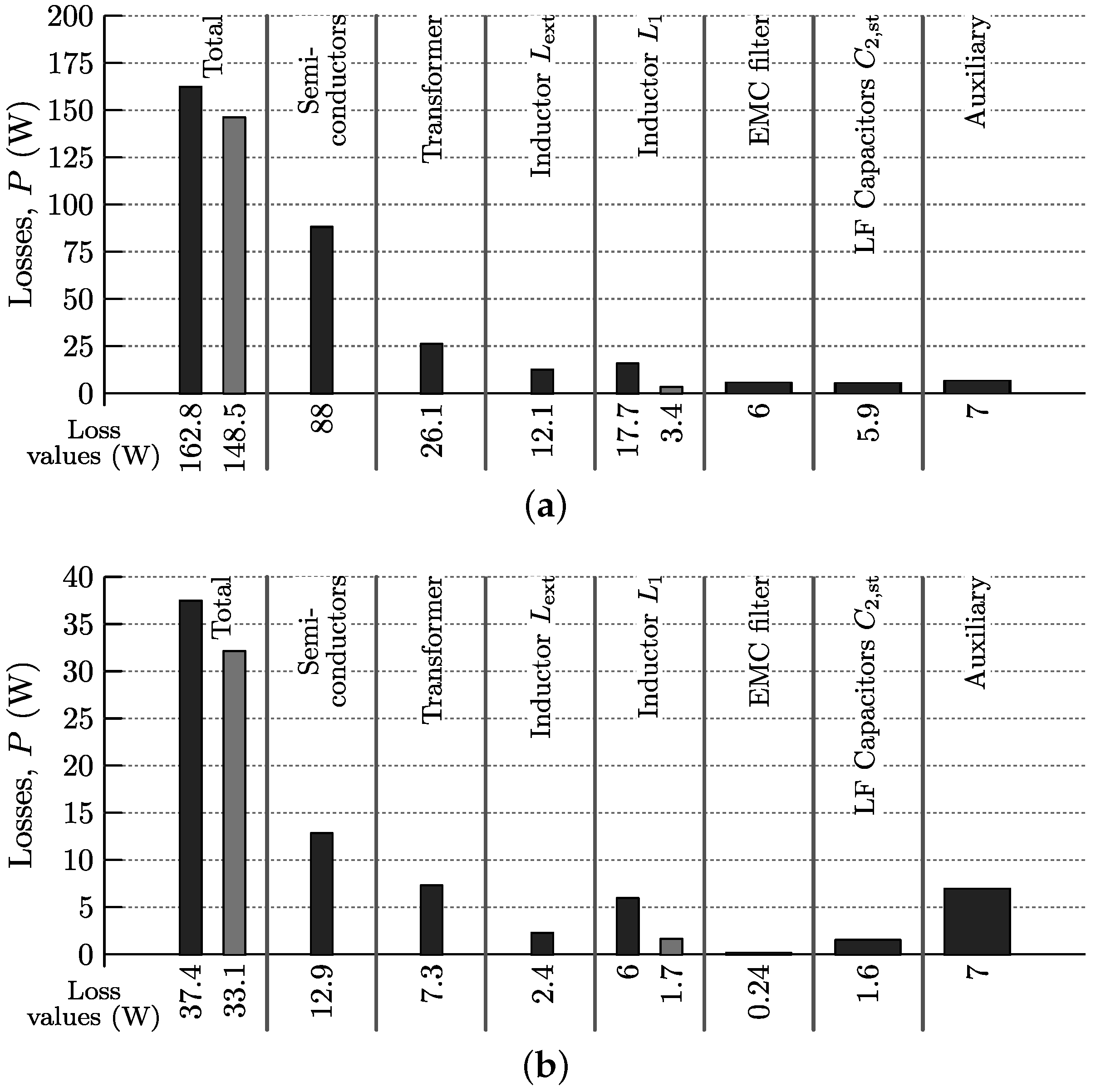
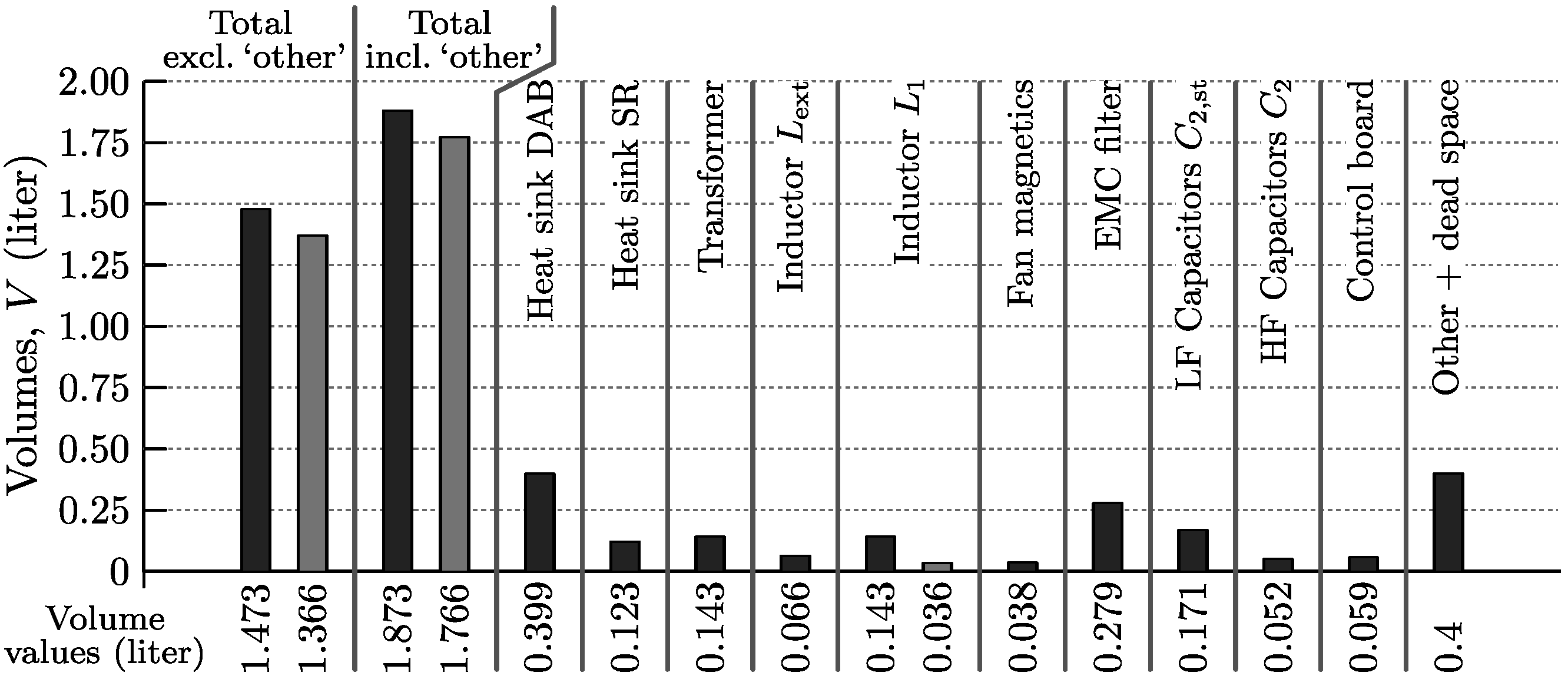
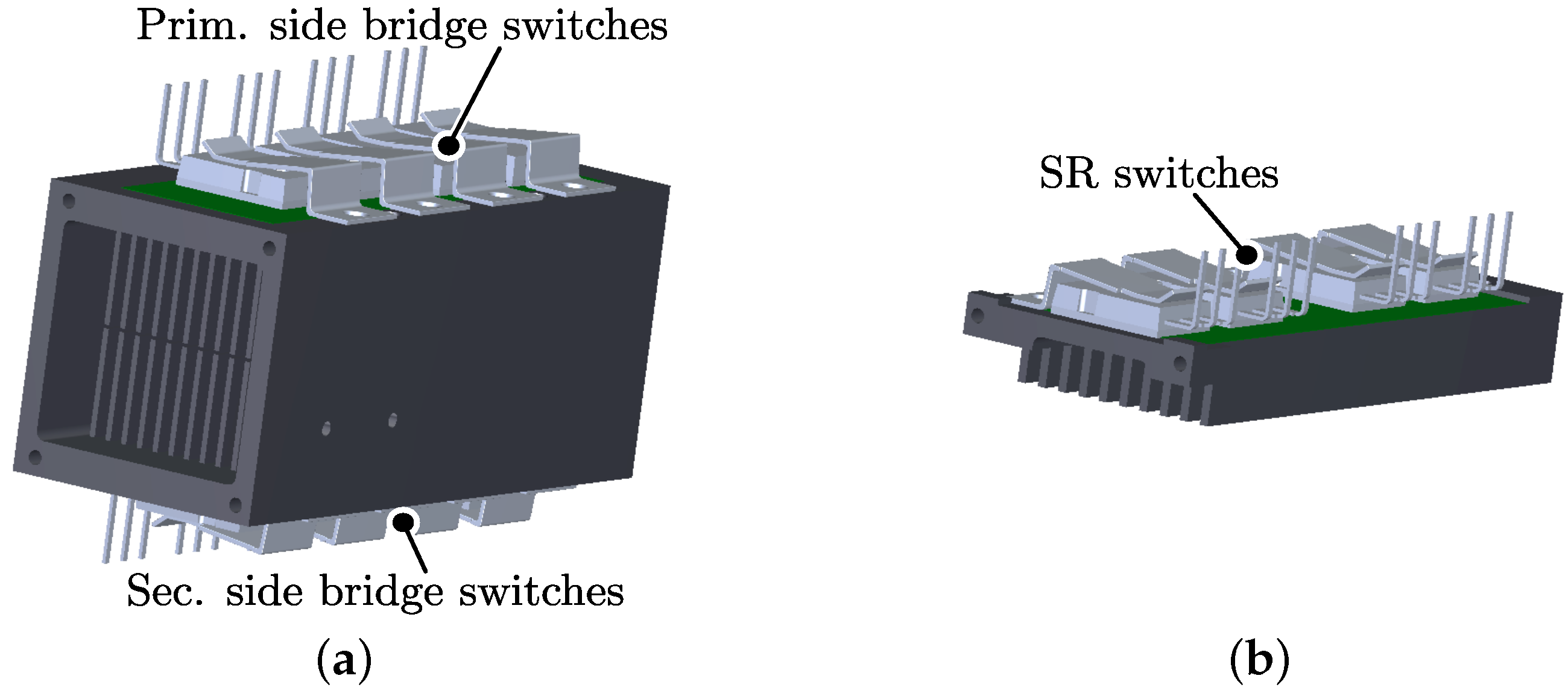
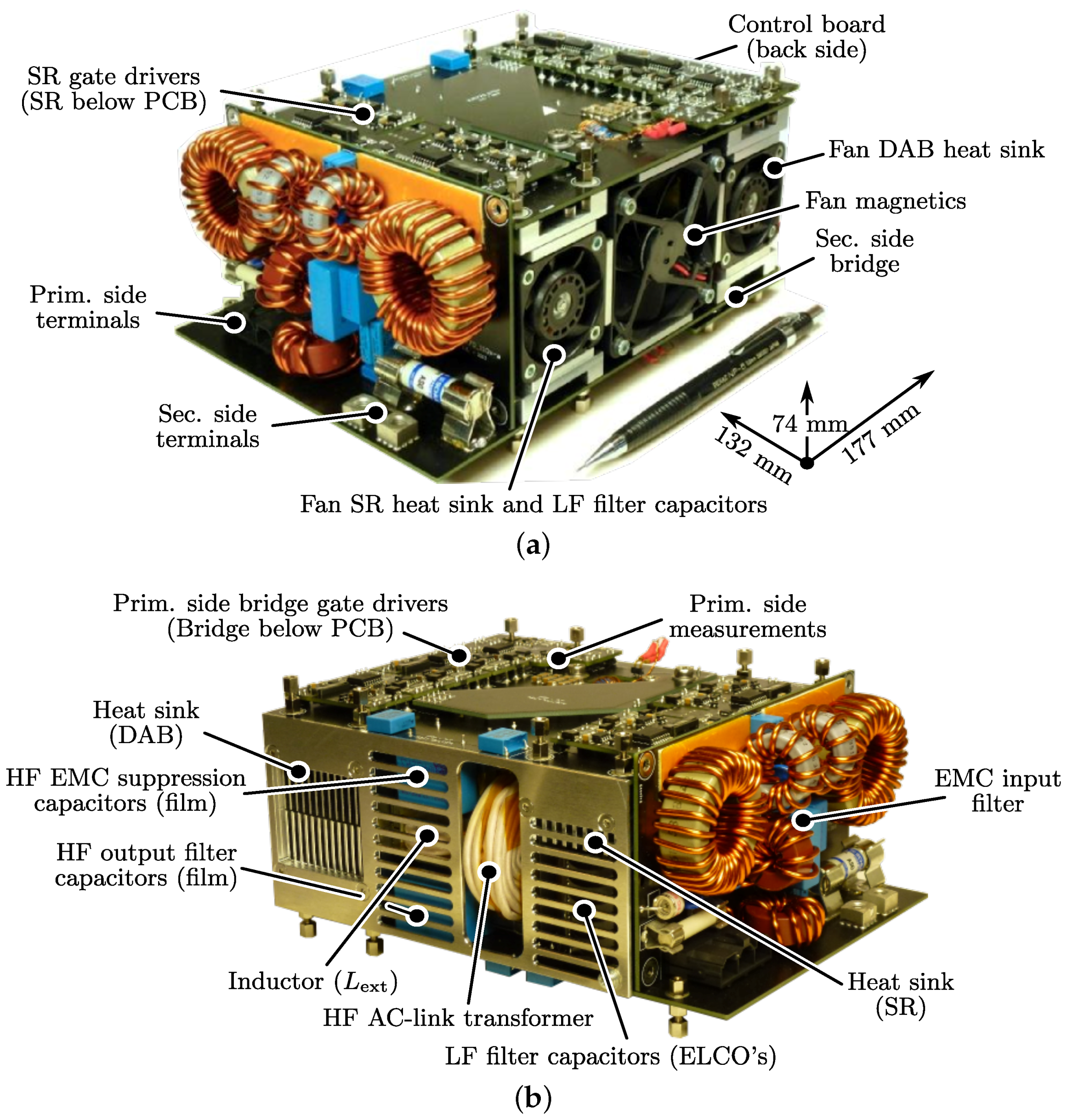
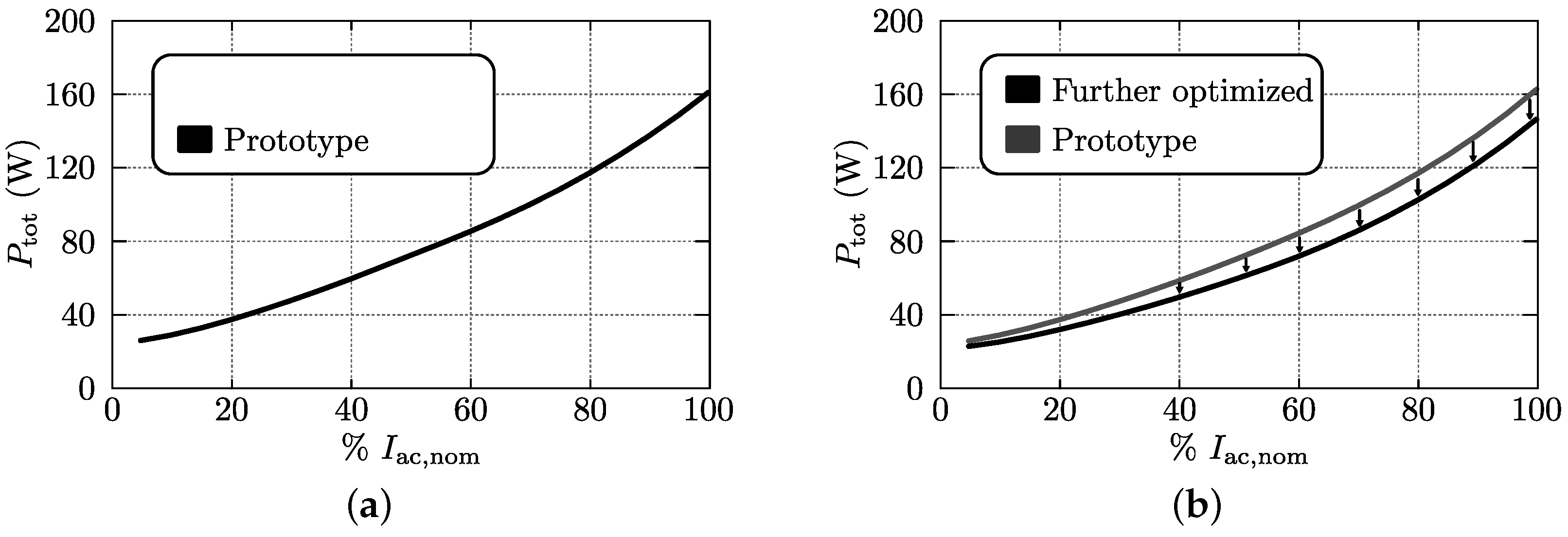
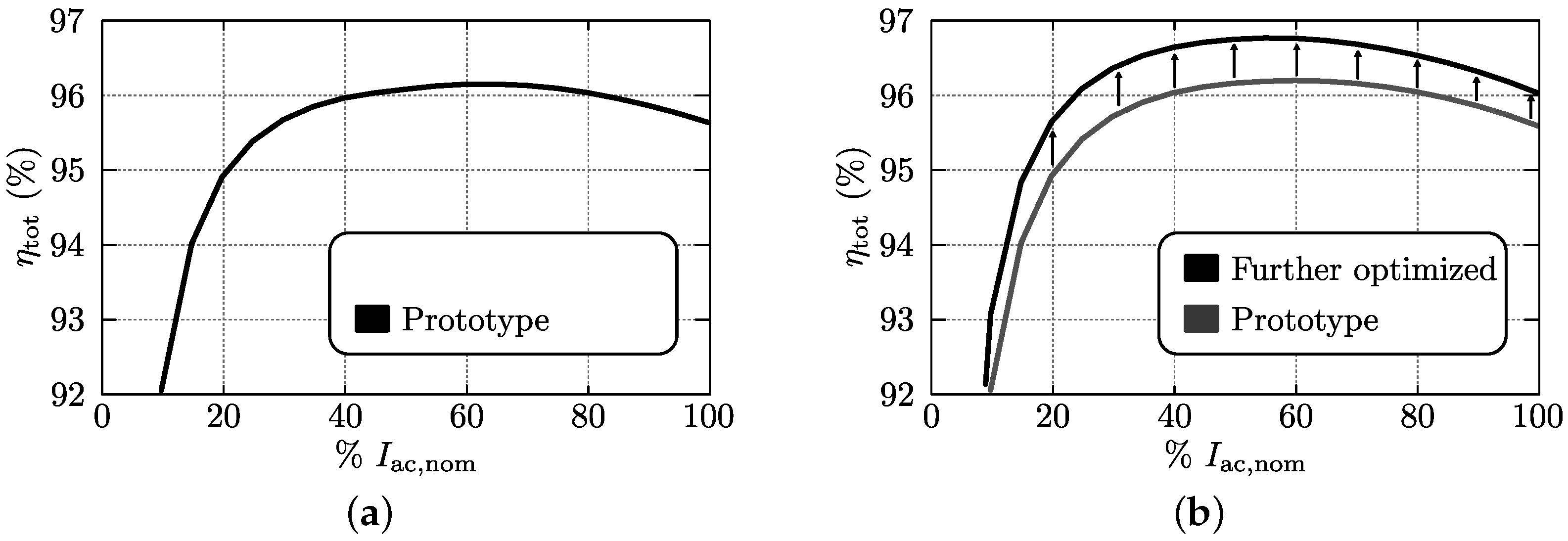
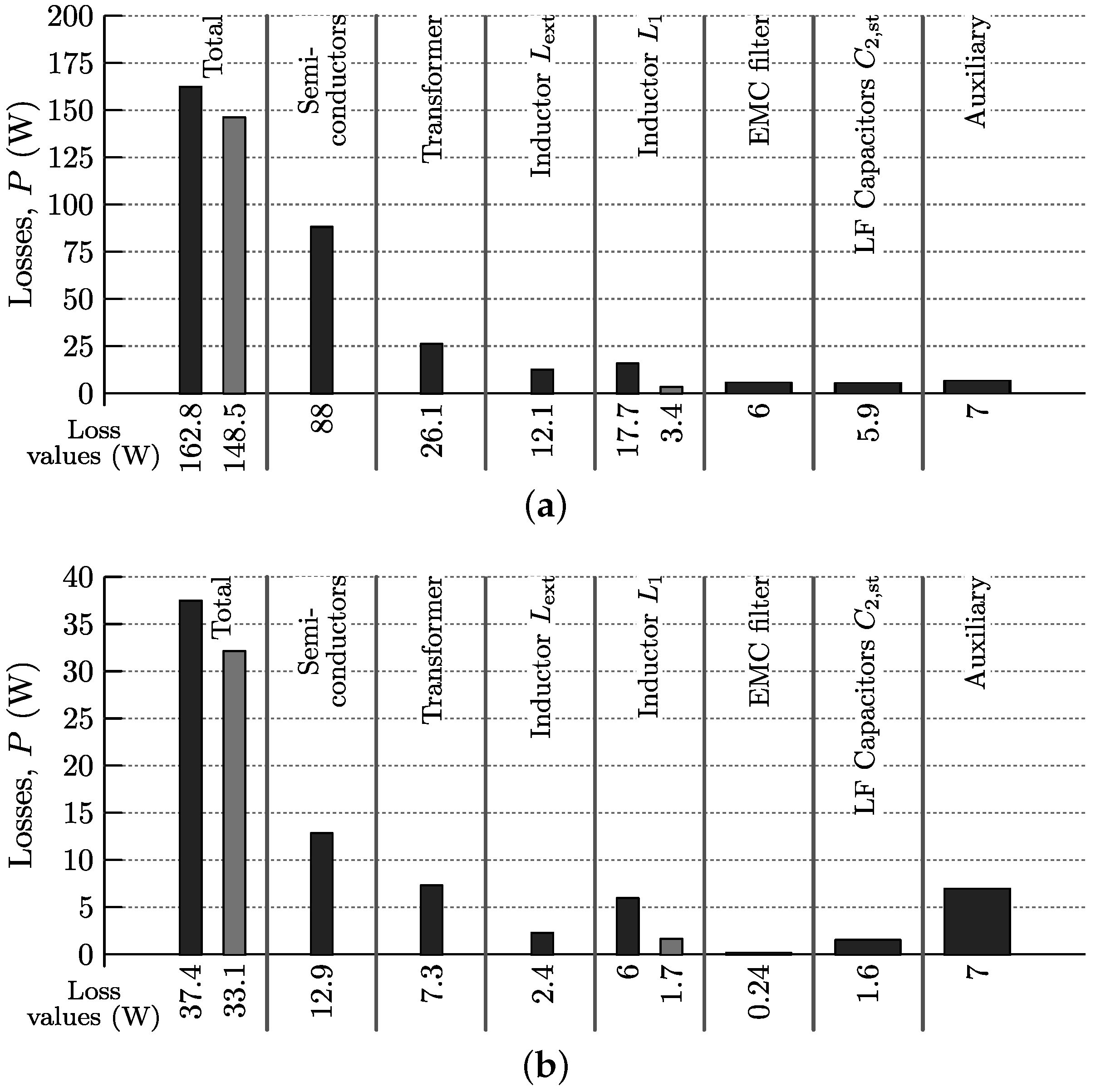
5. Hardware Demonstrator and Calculated Performance
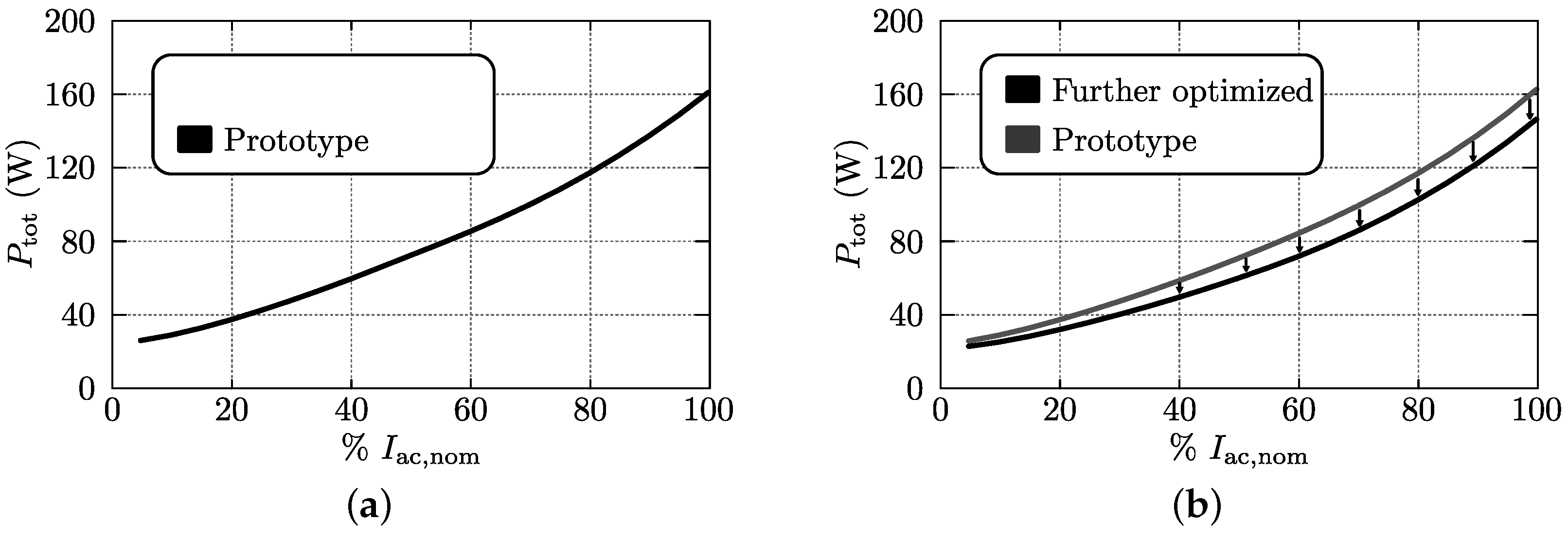
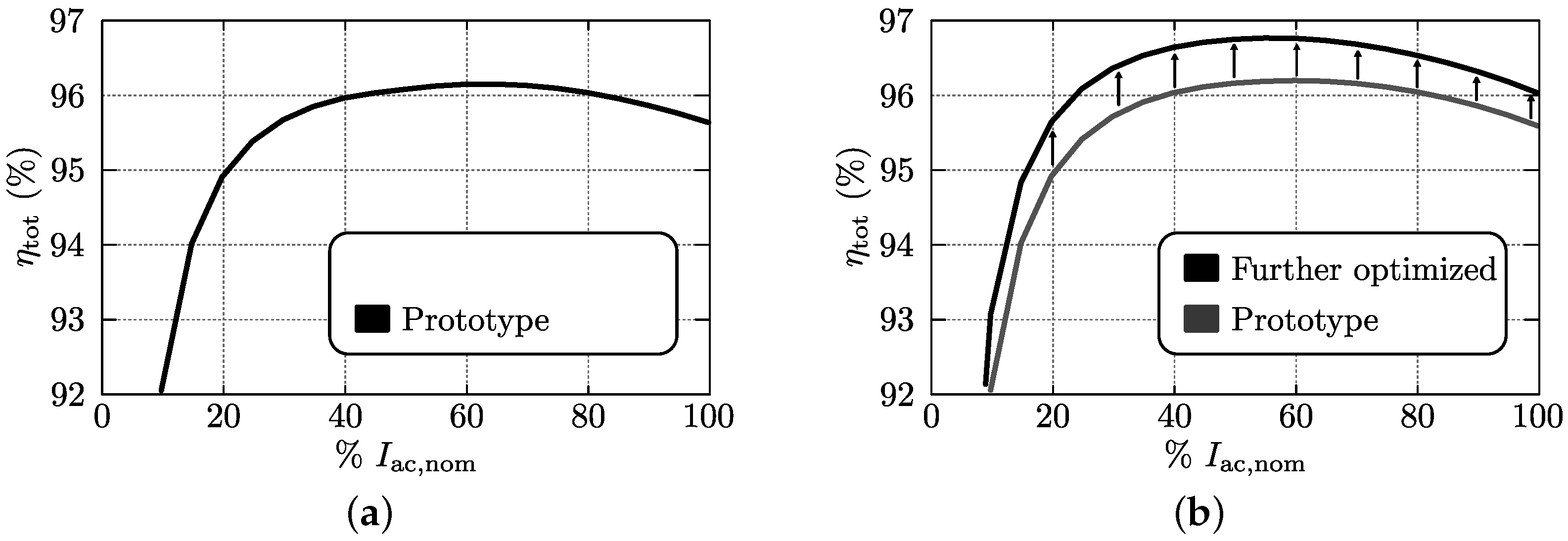
- Converter design A; prototype converter; uses the design “prot.” (prototype) for . This is how the hardware demonstrator is implemented;
- Converter design B; further optimized; uses the improved design “opt.” (optimal) for (see Section 4.2.3). This design yields higher conversion efficiencies and power density compared to converter design A.
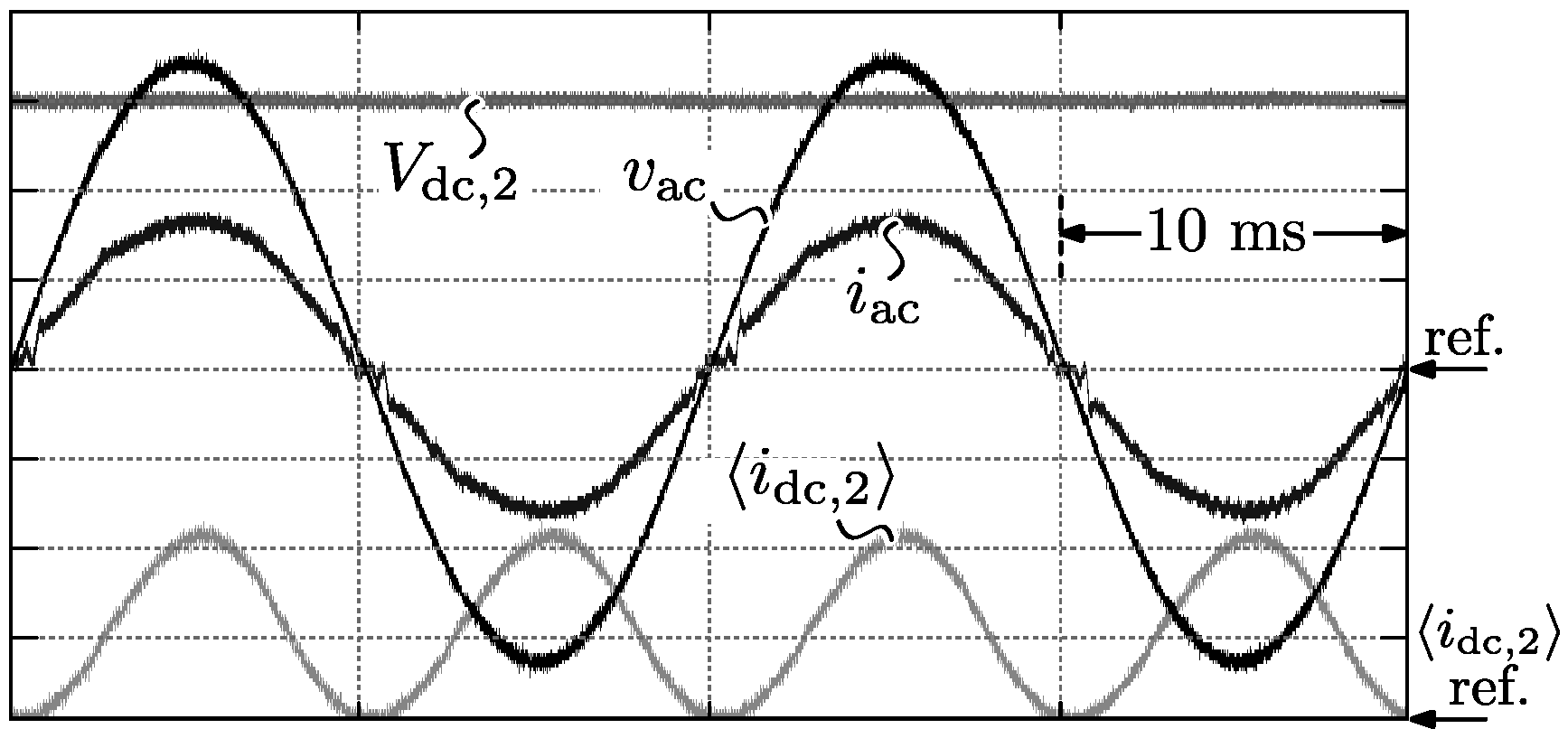
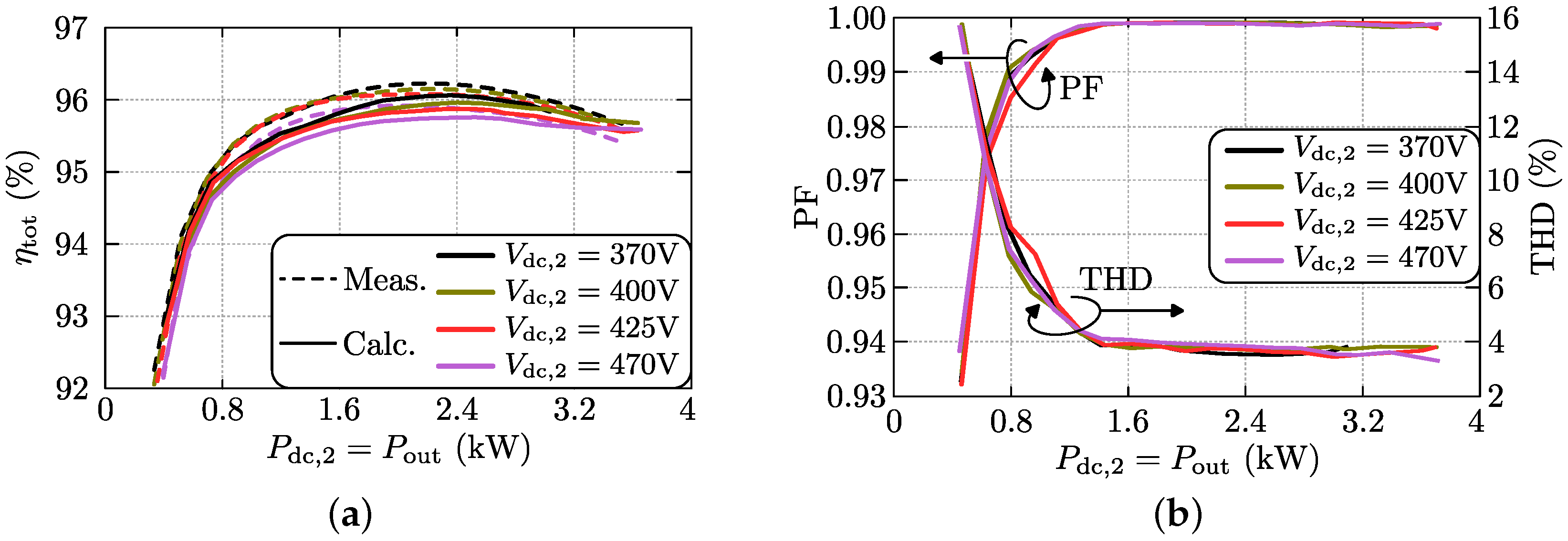
6. Measurements
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 1-S | Single-Stage |
| 2-S | Dual-Stage |
| BEV | Battery Electric Vehicle |
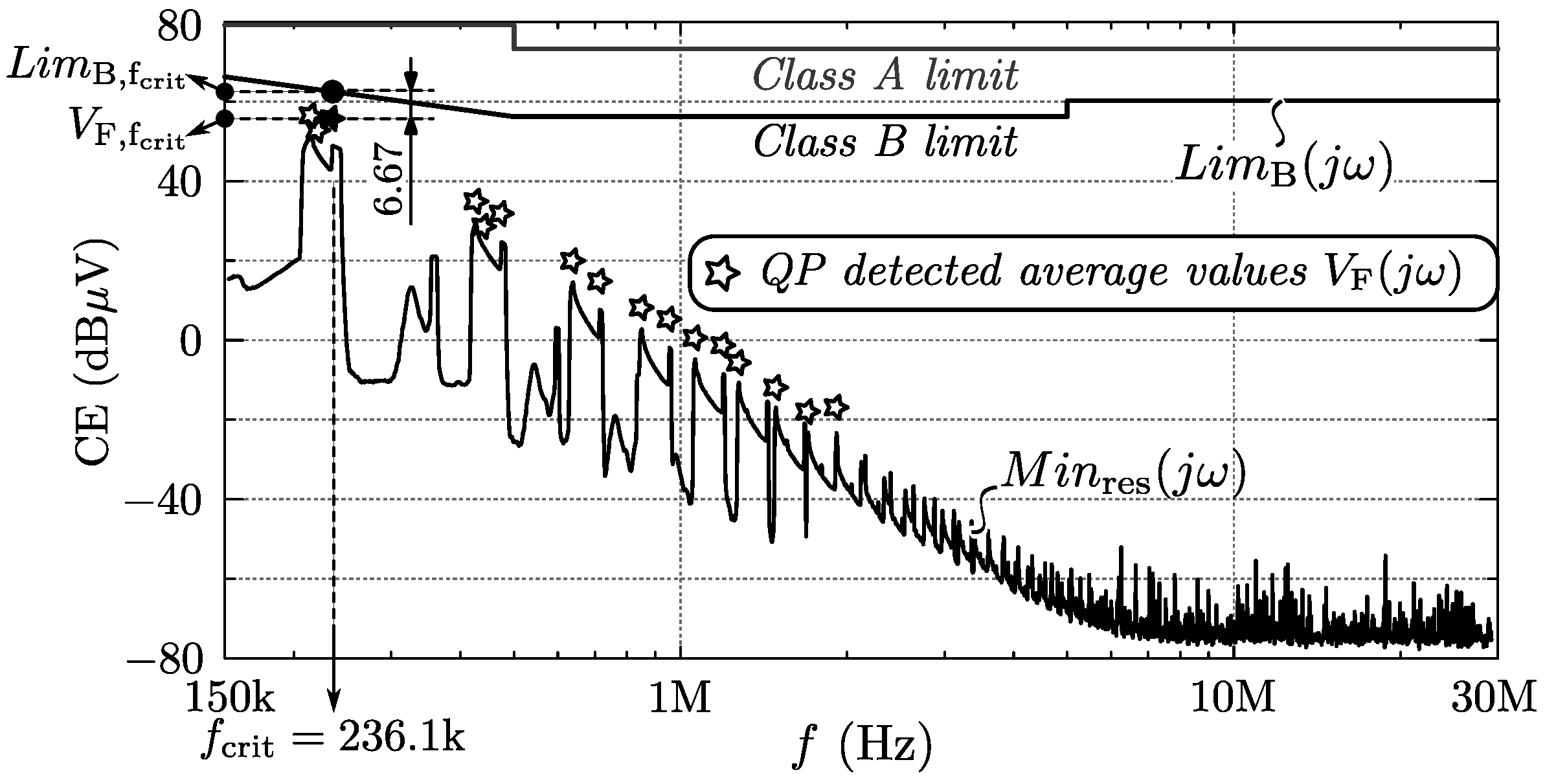
| CE | Conducted Emission |
| CM | Common Mode |
| CSPI | Cooling System Performance Index |
| DAB | Dual Active Bridge |
| DM | Differential Mode |
| ELCO | Electrolytic Capacitor |
| EMC | Electromagnetic Compatibility |
| ESR | Equivalent Series Resistance |
| FPGA | Field-Programmable Gate Array |
| HF | High-Frequency |
| iGSE | improved Generalized Steinmetz Equation |
| LF | Low-Frequency |
| LISN | Line Impedance Stabilization Network |
| MOSFET | Metal Oxide Semiconductor Field-Effect Transistor |
| PF | Power Factor |
| PFC | Power Factor Correction |
| PHEV | Plug-in Hybrid Electric Vehicle |
| QP | Quasi-Peak |
| RBW | Resolution Bandwidth |
| SR | Synchronous Rectifier |
| TCM | Triangular Current Mode |
| THD | Total Harmonic Distortion |
| V2G | Vehicle-to-Grid |
| ZVS | Zero Voltage Switching |
Appendix A. Supplement to Section 4
Appendix A.1. Semiconductors and Heat Sinks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Value (FCH76...) | Value (STY112...) | Condition | Description |
|---|---|---|---|---|
| (V) | 600 | 650 | C | Drain to source blocking voltage |
| (A) | 72.8 | 96 | C | Continuous drain current |
| (A) | 46 | 61 | C | Continuous drain current |
| (K/W) | 0.23 | 0.2 | - | Thermal resistance, junction to case |
| (mΩ) | 28.7 ( A) | 19 ( A) | V, C | Static drain to source on-resistance (typ.) |
| (A) | 76 | 96 | C | Maximum continuous drain to source diode forward current |
| (nC) | 230 | 350 | V | Total gate charge (typ.) |
| (C) | 1.8 ( A) | 17 ( A) | V | Reverse recovery charge |
| (ns) | 200 ( A) | 570 ( A) | V | Reverse recovery time |
| - | TO-247 | Max247 | - | Package |
| MOSFET Type | ||||||
|---|---|---|---|---|---|---|
| FCH76N60NF | A, V | C, V | ||||
| STY112N65M5 | A, V | C, V | ||||
| MOSFET Type | ||||||
|---|---|---|---|---|---|---|
| FCH76N60NF | 25 C | 38 A | ||||
| STY112N65M5 | 25 C | 48 A |
| Predef. Values | Calc. Optimal Values | |||||||
|---|---|---|---|---|---|---|---|---|
| L (mm) | c (mm) | d (mm) | b (mm) | n | s (mm) | t (mm) | k | |
| Optimum | 99.8 | 37 | 6 | 40.3 | 14 | 1.9 | 1 | 0.6482 |
| (L) | (L) | (L) | (K/W) | (K/W) | (W/K·L) | |||
| 0.2279 | 0.2918 | 0.399 | 0.7142 | 0.3571 | 9.5967 | |||
| L (mm) | c (mm) | d (mm) | b (mm) | n | s (mm) | t (mm) | k | |
| Prototype | 99.8 | 37 | 6 | 40.3 | 13 | 2.1 | 1 | 0.6774 |
| (used for calc.) | (L) | (L) | (L) | (K/W) | (K/W) | (W/K·L) | ||
| 0.2279 | 0.2918 | 0.399 | 0.7298 | 0.3649 | 9.3907 | |||
| Predef. Values | Calc. Optimal Values | |||||||
|---|---|---|---|---|---|---|---|---|
| L (mm) | c (mm) | d (mm) | b (mm) | n | s (mm) | t (mm) | k | |
| Optimum | 104 | 10 | 5 | 36 | 14 | 1.6 | 1 | 0.608 |
| (L) | (L) | (L) | (K/W) | (K/W) | (W/K·L) | |||
| 0.0624 | 0.0767 | 0.1227 | 1.4372 | 1.4372 | 9.0741 | |||
| L (mm) | c (mm) | d (mm) | b (mm) | n | s (mm) | t (mm) | k | |
| Prototype | 104 | 10 | 5 | 36 | 9 | 2.5 | 1.5 | 0.625 |
| (used for calc.) | (L) | (L) | (L) | (K/W) | (K/W) | (W/K·L) | ||
| 0.0624 | 0.0767 | 0.1227 | 1.7264 | 1.7264 | 7.5542 | |||
Appendix A.2. Magnetic Elements of the DAB: Inductors and Transformer
| Variable | Value | Description |
|---|---|---|
| 1 | turns ratio | |
| 6 | number of turns (primary-side winding) | |
| 6 | number of turns (secondary-side winding) | |
| (H) | 0.76 | primary-side leakage inductance |
| (H) | 0.76 | secondary-side leakage inductance |
| (H) | 62.1 | magnetizing inductance, which is equal to the secondary-side commutation inductance |
| (mm) | 0.234 | air gap length |
| 700 | number of strands in a Litz bundle (primary-side winding) | |
| 700 | number of strands in a Litz bundle (secondary-side winding) | |
| (m) | 80 | strand diameter (primary-side winding) |
| (m) | 80 | strand diameter (secondary-side winding) |
| 2 | number of paralleled Litz bundles (primary-side winding) | |
| 2 | number of paralleled Litz bundles (secondary-side winding) | |
| - | no | interleaving of the windings |
| - | N97 | core material |
| - | EELP58 | core type/combination |
| - | 2 | number of stacked core combinations |
| (m) | 0.076 | total core length |
| (L) | 0.143 | boxed volume of the transformer |
| Variable | Value | Description |
|---|---|---|
| 4 | number of turns | |
| (H) | 12.2 | inductance value |
| (mm) | 0.603 | air gap length |
| 1458 | number of strands in a Litz bundle | |
| (m) | 71 | strand diameter |
| 1 | number of paralleled Litz bundles | |
| - | N97 | core material |
| - | EELP38 | core type/combination |
| - | 3 | number of stacked core combinations |
| (m) | 0.076 | total core length |
| (L) | 0.0661 | boxed volume of the inductor |
| Variable | Value, “opt.” | Value, “prot.” | Description |
|---|---|---|---|
| 13 | 6 | number of turns | |
| (H) | 62.1 | 62.1 | inductance value |
| (mm) | 0.92 | 0.234 | air gap length |
| 184 | 700 | number of strands in a Litz bundle | |
| (m) | 50 | 80 | strand diameter |
| 2 | 2 | number of paralleled Litz bundles | |
| - | N97 | N97 | core material |
| - | EELP32 | EELP58 | core type/combination |
| - | 3 | 2 | number of stacked core combinations |
| (m) | 0.061 | 0.076 | total core length |
| (L) | 0.0358 | 0.143 | boxed volume of the inductor |
Appendix A.3. EMC Input Filter
| Component | Value | Quantity | Specification |
|---|---|---|---|
| Filter Stage 1 | |||
| /, coupled inductor | 34.6/1.64 H | 2 | Magnetics, High Flux 60, CO58083A2, 23:5 turns, 11 AWG wire |
| , inductor | 6.9 H | 2 | Magnetics, MPP60, CO55351A2, 13 turns, 11 AWG wire |
| , X2 capacitor (MKP) | 13.2 F | 6 in par. | EPCOS-B32923E3225, 2.2 F, 305 V |
| , SMD resistor | 0.19 Ω | 2 × 2 in par. | 0.38 Ω-1 W |
| Filter Stage 2 | |||
| = | 0 ... 300 H | - | Mains inductance |
| , X2 capacitor (MKP) | 1 F | 1 | EPCOS-B32923C3105, 1 F, 305 V |
| , X2 capacitor (MKP) | 0.47 F | 1 | EPCOS-B32922C3474, 0.47 F, 305 V |
| , SMD resistor | 20 Ω | 2 in ser. | 10 Ω-0.33 W |
| Component | Value | Quantity | Specification |
|---|---|---|---|
| AC-Side: Filter Stage 1 | |||
| , inductor | 0.34 mH @ 100 kHz | 1 | Vacuumschmelze VAC, VITROPERM 500F, L2020-W409, 2 × 5 turns, 11 AWG wire |
| , Y2 capacitor (MKP) | 6.8 nF | 2 × 1 | EPCOS-B32021A3682, 6.8 nF, 300 V |
| , Y2 capacitor (MKP) | 2.2 nF | 2 × 1 | EPCOS-B32021A3222, 2.2 nF, 300 V |
| AC-Side: Filter Stage 2 | |||
| , inductor | 0.34 mH @ 100 kHz | 1 | Vacuumschmelze VAC, VITROPERM 500F, L2020-W409, 2 × 5 turns, 11 AWG wire |
| , Y2 capacitor (MKP) | 10 nF | 2 × 1 | EPCOS-B32022A3103, 10 nF, 300 V |
| AC-Side: Filter Stage 3 | |||
| , Y2 capacitor (MKP) | 1 nF | 2 × 1 | EPCOS-B32021A3102, 1 nF, 300 V |
| DC-Side | |||
| , Y2 capacitor (MKP) | 13.6 nF | 2 × 2 | EPCOS-B32021A3682, 6.8 nF, 300 V |
Appendix B. Supplement to Section 5

References
- Haghbin, S.; Lundmark, S.; Alakula, M.; Carlson, O. Grid-Connected Integrated Battery Chargers in Vehicle Applications: Review and New Solution. IEEE Trans. Ind. Electron. 2013, 60, 459–473. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Dong, D.; Cvetkovic, I.; Boroyevich, D.; Zhang, W.; Wang, R.; Mattavelli, P. Grid-Interface Bidirectional Converter for Residential DC Distribution Systems—Part One: High-Density Two-Stage Topology. IEEE Trans. Power Electron. 2013, 28, 1655–1666. [Google Scholar] [CrossRef]
- Kim, H.S.; Ryu, M.H.; Baek, J.W.; Jung, J.H. High-Efficiency Isolated Bidirectional AC-DC Converter for a DC Distribution System. IEEE Trans. Power Electron. 2013, 28, 1642–1654. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Fan, Y.; Zhu, W.; Xue, Z.; Zhang, L.; Zou, Z. A Multi-Function Conversion Technique for Vehicle-to-Grid Applications. Energies 2015, 8, 7638–7653. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A Review of Single-Phase Improved Power Quality AC-DC Converters. IEEE Trans. Ind. Electron. 2003, 50, 962–981. [Google Scholar] [CrossRef]
- Sekar, A.; Raghavan, D. Implementation of Single Phase Soft Switched PFC Converter for Plug-in-Hybrid Electric Vehicles. Energies 2015, 8, 13096–13111. [Google Scholar] [CrossRef]
- Marxgut, C.; Biela, J.; Kolar, J.W. Interleaved triangular current mode (TCM) resonant transition, single phase PFC rectifier with high efficiency and high power density. In Proceedings of the International Power Electronics Conference (IPEC 2010), Sapporo, Japan, 21–24 June 2010; pp. 1725–1732.
- Marxgut, C.; Krismer, F.; Bortis, D.; Kolar, J.W. Ultraflat Interleaved Triangular Current Mode (TCM) Single-Phase PFC Rectifier. IEEE Trans. Power Electron. 2014, 29, 873–882. [Google Scholar] [CrossRef]
- Steigerwald, R.L. A Comparison of Half-Bridge Resonant Converter Topologies. IEEE Trans. Power Electron. 1988, 3, 174–182. [Google Scholar] [CrossRef]
- Steigerwald, R.L.; de Doncker, R.W.; Kheraluwala, M.H. A Comparison of High-Power DC-DC Soft-Switched Converter Topologies. IEEE Trans. Ind. Appl. 1996, 32, 1139–1145. [Google Scholar] [CrossRef]
- Mehdipour, A.; Farhangi, S. Comparison of three isolated bi-directional DC/DC converter topologies for a backup photovoltaic application. In Proceedings of the 2nd International Conference on Electric Power and Energy Conversion Systems (EPECS 2011), Sharjah, UAE, 15–17 November 2011; pp. 1–5.
- Tan, N.M.L.; Abe, T.; Akagi, H. Topology and application of bidirectional isolated DC-DC converters. In Proceedings of the IEEE 8th International Conference on Power Electronics and ECCE Asia (ICPE 2011—ECCE Asia), Jeju, Korea, 30 May–3 June 2011; pp. 1039–1046.
- Krismer, F.; Kolar, J.W. Efficiency-Optimized High-Current Dual Active Bridge Converter for Automotive Applications. IEEE Trans. Ind. Electron. 2012, 59, 2745–2760. [Google Scholar] [CrossRef]
- Wang, Y.C.; Ni, F.M.; Lee, T.L. Hybrid Modulation of Bidirectional Three-Phase Dual-Active-Bridge DC Converters for Electric Vehicles. Energies 2016, 9, 492. [Google Scholar] [CrossRef]
- Hu, S.; Li, X.; Lu, M.; Luan, B.Y. Operation Modes of a Secondary-Side Phase-Shifted Resonant Converter. Energies 2015, 8, 12314–12330. [Google Scholar] [CrossRef]
- Shi, X.; Jiang, J.; Guo, X. An Efficiency-Optimized Isolated Bidirectional DC-DC Converter with Extended Power Range for Energy Storage Systems in Microgrids. Energies 2013, 6, 27–44. [Google Scholar] [CrossRef]
- Norrga, S. A soft-switched bi-directional isolated AC/DC converter for AC-Fed railway propulsion applications. In Proceedings of the International Conference on Power Electronics, Machines and Drives (PEMD 2002), Bath, UK, 4–7 June 2002; pp. 433–438.
- Norrga, S. Experimental Study of a Soft-Switched Isolated Bidirectional AC-DC Converter Without Auxiliary Circuit. IEEE Trans. Power Electron. 2006, 21, 1580–1587. [Google Scholar] [CrossRef]
- Vangen, K.; Melaa, T.; Bergsmark, S.; Nilsen, R. Efficient high-frequency soft-switched power converter with signal processor control. In Proceedings of the IEEE 13th International Telecommunications Energy Conference (INTELEC 1991), Kyoto, Japan, 5–8 November 1991; pp. 631–639.
- Kheraluwala, M.H.; de Doncker, R.W. Single phase unity power factor control for dual active bridge converter. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Toronto, ON, Canada, 2–8 October 1993; Volume 2, pp. 909–916.
- Everts, J.; van den Keybus, J.; Krismer, F.; Driesen, J.; Kolar, J.W. Switching control strategy for full ZVS soft-switching operation of a dual active bridge AC/DC converter. In Proceedings of the IEEE 27th Annual Applied Power Electronics Conference and Exposition (APEC 2012), Orlando, FL, USA, 5–9 February 2012; pp. 1048–1055.
- Jauch, F.; Biela, J. Single-phase single-stage bidirectional isolated ZVS AC-DC converter with PFC. In Proceedings of the 15th International Power Electronics and Motion Control Conference (EPE/PEMC 2012), Novi Sad, Serbia, 3–6 September 2012; pp. LS5d.1-1–LS5d.1-8.
- Everts, J.; Krismer, F.; van den Keybus, J.; Driesen, J.; Kolar, J.W. Optimal ZVS Modulation of Single-Phase Single-Stage Bidirectional DAB AC-DC Converters. IEEE Trans. Power Electron. 2014, 29, 3954–3970. [Google Scholar] [CrossRef]
- Everts, J.; Krismer, F.; van den Keybus, J.; Driesen, J.; Kolar, J.W. Charge-based ZVS soft switching analysis of a single-stage dual active bridge AC-DC converter. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE 2013), Denver, CO, USA, 15–19 September 2013; pp. 4820–4829.
- Weise, N.D.; Basu, K.; Castelino, G.; Mohan, N. A Single-Stage Dual-Active-Bridge-Based Soft Switched AC-DC Converter With Open-Loop Power Factor Correction and Other Advanced Features. IEEE Trans. Power Electron. 2014, 29, 4007–4016. [Google Scholar] [CrossRef]
- Krismer, F.; Kolar, J.W. Closed Form Solution for Minimum Conduction Loss Modulation of DAB Converters. IEEE Trans. Power Electron. 2012, 27, 174–188. [Google Scholar] [CrossRef]
- Everts, J.; Krismer, F.; van den Keybus, J.; Driesen, J.; Kolar, J.W. Comparative evaluation of soft-switching, bidirectional, isolated AC/DC converter topologies. In Proceedings of the IEEE 27th Annual Applied Power Electronics Conference and Exposition (APEC 2012), Orlando, FL, USA, 5–9 February 2012; pp. 1067–1074.
- The International Electrotechnical Commission. Electromagnetic Compatibility (EMC)—Part 3-2: Limits for Harmonic Current Emissions (Equipment Input Current ⩽16 A per Phase); IEC 61000-3-2; IEC, International Electrotechnical Commission: Geneva, Switzerland, 1995. [Google Scholar]
- De Doncker, R.W.; Divan, D.M.; Kheraluwala, M.H. A three-phase soft-switched high power density DC/DC converter for high power applications. In Proceedings of the IEEE Industry Applications Society Annual Meeting, Pittsburgh, PA, USA, 2–7 October 1988; Volume 1, pp. 796–805.
- Infineon Technologies AG. First 650 V Rated Super Junction MOSFET with Fast Body Diode Suitable for Resonant Topologies; Technical Report; Infineon Technologies AG: Neubiberg, Germany, 2011. [Google Scholar]
- Drofenik, U.; Laimer, G.; Kolar, J.W. Theoretical converter power density limits for forced convection cooling. In Proceedings of the International PCIM Europe 2005 Conference (PCIM 2005), Nuremberg, Germany, 7–9 June 2005; pp. 608–619.
- Drofenik, U.; Kolar, J.W. Sub-optimum design of a forced air cooled heat sink for simple manufacturing. In Proceedings of the Power Conversion Conference-Nagoya (PCC 2007), Nagoya, Japan, 2–5 April 2007; pp. 1189–1194.
- Kolar, J.W.; Drofenik, U.; Biela, J.; Heldwein, M.L.; Ertl, H.; Friedli, T.; Round, S.D. PWM converter power density barriers. In Proceedings of the Power Conversion Conference (PCC 2007), Nagoya, Japan, 2–5 April 2007; pp. P-9–P-29.
- Krismer, F. Modeling and Optimization of Bidirectional Dual Active Bridge DC-DC Converter Topologies. Ph.D. Thesis, Swiss Federal Institute of Technology (ETH Zürich), Power Electronic Systems (PES) Laboratory, Zürich, Switzerland, 2010. [Google Scholar]
- Buccella, C.; Cecati, C.; de Monte, F. A Coupled Electrothermal Model for Planar Transformer Temperature Distribution Computation. IEEE Trans. Ind. Electron. 2008, 55, 3583–3590. [Google Scholar] [CrossRef]
- Ferreira, J.A. Analytical Computation of AC Resistance of Round and Rectangular Litz Wire Windings. IEE Proc. B Electr. Power Appl. 1992, 139, 21–25. [Google Scholar] [CrossRef]
- Sullivan, C.R. Optimal Choice for Number of Strands in a Litz-Wire Transformer Winding. IEEE Trans. Power Electron. 1999, 14, 283–291. [Google Scholar] [CrossRef]
- Mühlethaler, J.; Kolar, J.W.; Ecklebe, A. Loss modeling of inductive components employed in power electronic systems. In Proceedings of the IEEE 8th International Conference on Power Electronics (ICPE ECCE Asia 2011), Jeju, Korea, 30 May–3 June 2011; pp. 945–952.
- Mühlethaler, J.; Kolar, J.W.; Ecklebe, A. A novel approach for 3D air gap reluctance calculations. In Proceedings of the IEEE 8th International Conference on Power Electronics (ICPE ECCE Asia 2011), Jeju, Korea, 30 May–3 June 2011; pp. 446–452.
- Venkatachalam, K.; Sullivan, C.R.; Abdallah, T.; Tacca, H. Accurate prediction of ferrite core loss with nonsinusoidal waveforms using only steinmetz parameters. In Proceedings of the IEEE Workshop on Computers in Power Electronics, Mayaguez, Puerto Rico, 3–4 June 2002; pp. 36–41.
- International Special Committee on Radio Interference. Limits and Methods of Measurement of Radio Disturbance Characteristics of Information Technology Equipment–Publication 22; IEC, International Special Committee on Radio Interference: Geneva, Switzerland, 1993. [Google Scholar]
- Nussbaumer, T.; Heldwein, M.L.; Kolar, J.W. Differential Mode Input Filter Design for a Three-Phase Buck-Type PWM Rectifier Based on Modeling of the EMC Test Receiver. IEEE Trans. Ind. Electron. 2006, 53, 1649–1661. [Google Scholar] [CrossRef]
- Erickson, R.W. Optimal single resistors damping of input filters. In Proceedings of the IEEE 14th Annual Applied Power Electronics Conference and Exposition (APEC 1999), Dallas, TX, USA, 14–18 March 1999; Volume 2, pp. 1073–1079.
- International Special Committee on Radio Interference. Specification for Radio Interference Measuring Apparatus and Measurement Methods–Publication 16; IEC, International Special Committee on Radio Interference: Geneva, Switzerland, 1977. [Google Scholar]
- Heldwein, M.L.; Nussbaumer, T.; Kolar, J.W. Common Mode Modelling and Filter Design for a Three-Phase Buck-Type Pulse Width Modulated Rectifier System. IET Power Electron. 2010, 3, 209–218. [Google Scholar] [CrossRef]
- Gautam, D.S.; Musavi, F.; Edington, M.; Eberle, W.; Dunford, W.G. An Automotive Onboard 3.3-kW Battery Charger for PHEV Application. IEEE Trans. Veh. Technol. 2012, 61, 3466–3474. [Google Scholar] [CrossRef]
- Kolar, J.W.; Krismer, F.; Lobsiger, Y.; Muhlethaler, J.; Nussbaumer, T.; Minibock, J. Extreme efficiency power electronics. In Proceedings of the 7th International Conference on Integrated Power Electronics Systems (CIPS 2012), Nuremberg, Germany, 6–8 March 2012; pp. 1–22.


| Property | Value | |
|---|---|---|
| ac-side | (V) | 230 (nominal) |
| (A) | 16 (nominal) | |
| (Hz) | 50 | |
| dc-side | (V) | |
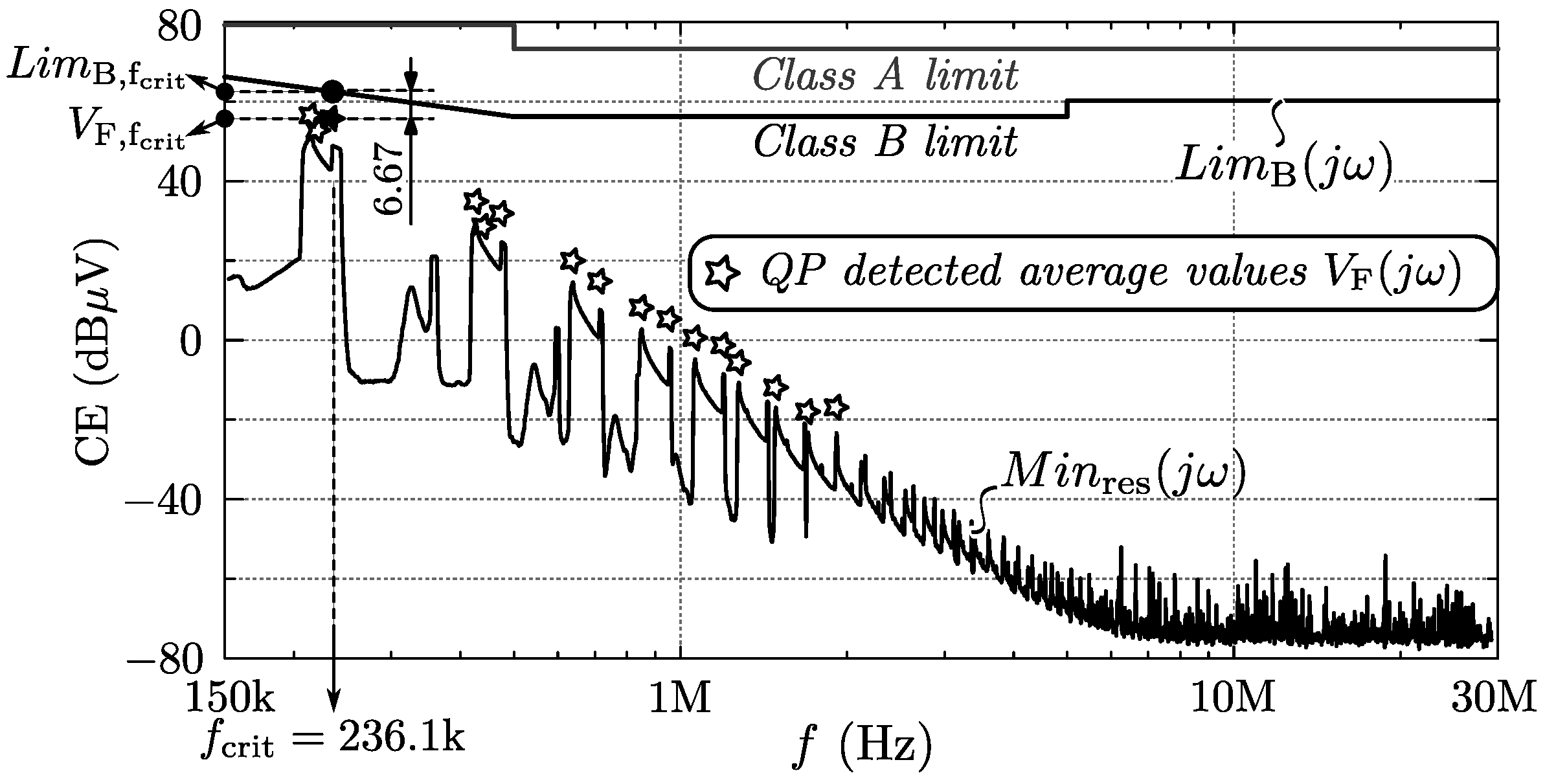
| EMC compliance | CISPR 22 Class B | |
| PF | (at ) | |
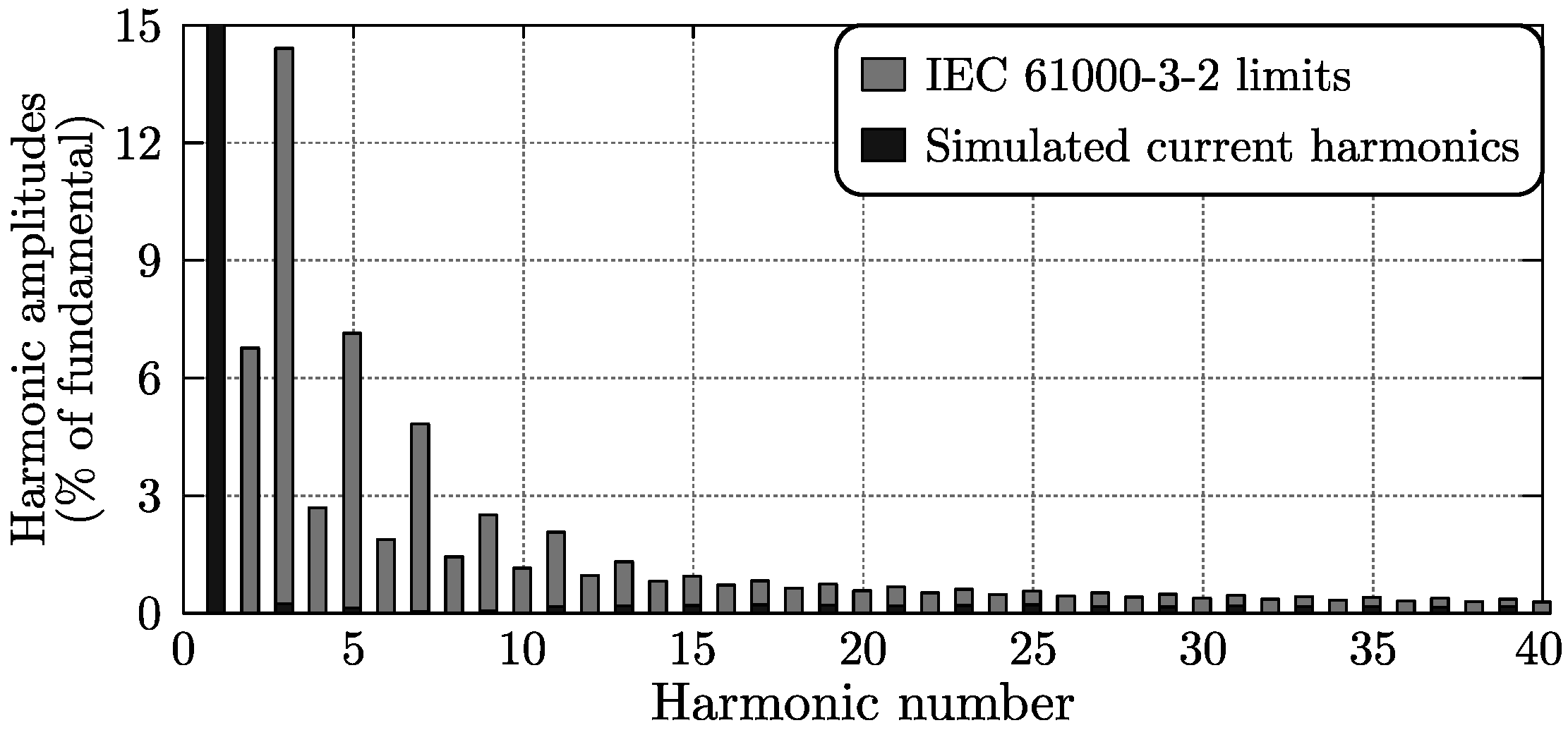
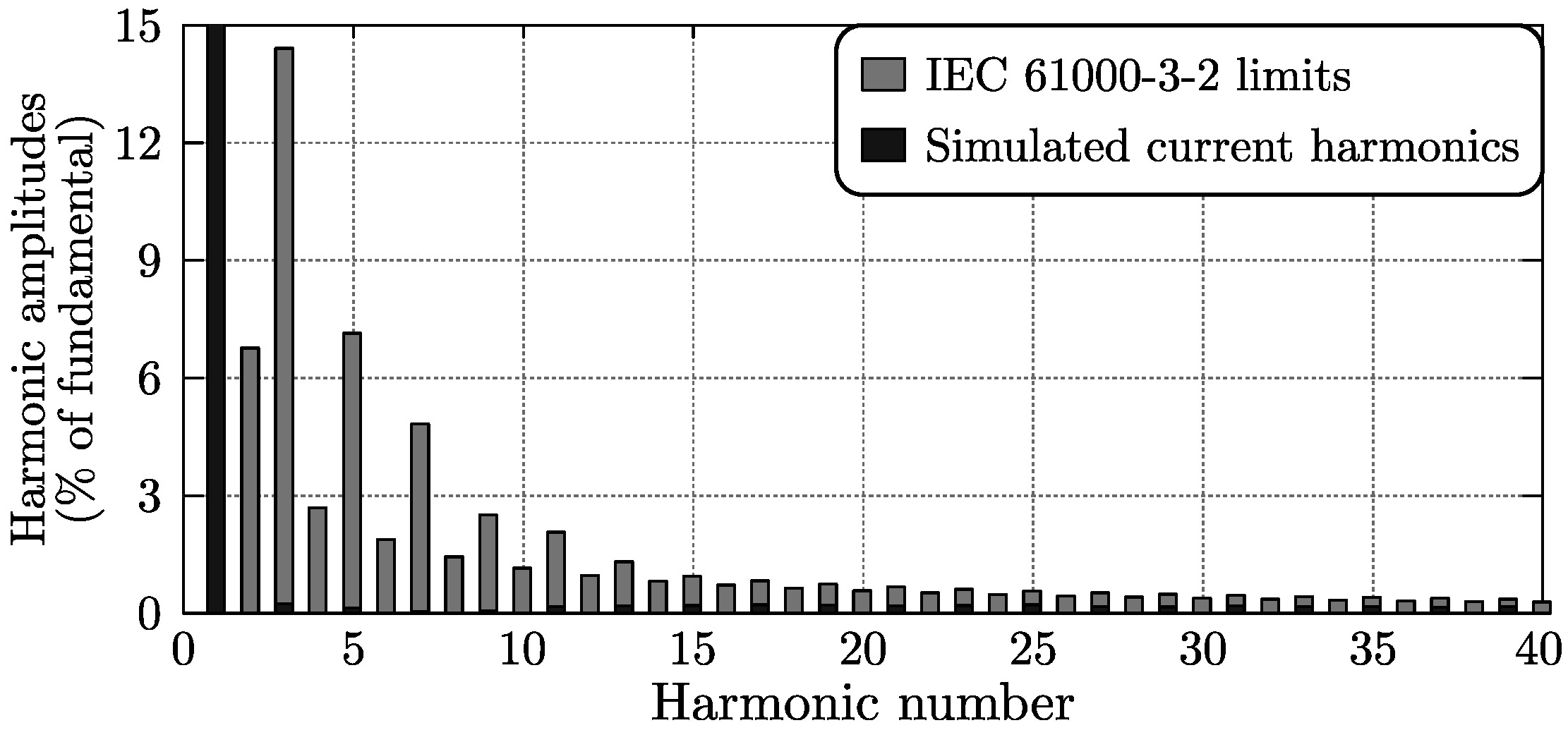
| THD | IEC 61000-3-2 standard [30], and (at ) | |
| Additional Requirements |
|---|
| • Galvanic isolation |
| • Bidirectional power flow capability |
| • High conversion efficiency ( within reasonable power range) |
| • High power density ( kW/L) |
| • Autonomous air cooling |
| • MOSFET-type power switches |
| Variable | Unit | Description |
|---|---|---|
| d | m | base plate thickness |
| t | m | width of a fin |
| b | m | total width of all air channels |
| c | m | total height of the air channel (=height of the fins) |
| s | m | width of a single air channel |
| L | m | length of the air channels |
| n | - | number of channels |
| k | - | fin spacing ratio according to (54) |
| m | area of the heat sink base plate () | |
| m | hydraulic diameter of one channel according to (53) | |
| N/m | pressure drop across the heat sink channels | |
| m/s | total volume flow of the air in the heat sink channels | |
| - | average Reynolds number according to (58) | |
| - | Prandtl number (air, 80 C) | |
| - | average Nusselt number according to (59) for laminar airflow or according to (60) for turbulent airflow | |
| h | W/mK | convective heat transfer coefficient according to (61) |
| W/mK | thermal conductivity of the heat sink material | |
| kg/m | air density (80 C) | |
| m/s | cinematic viscosity of air (80 C) | |
| J/kgK | specific thermal capacitance of air | |
| W/mK | thermal conductivity of air (80 C) |
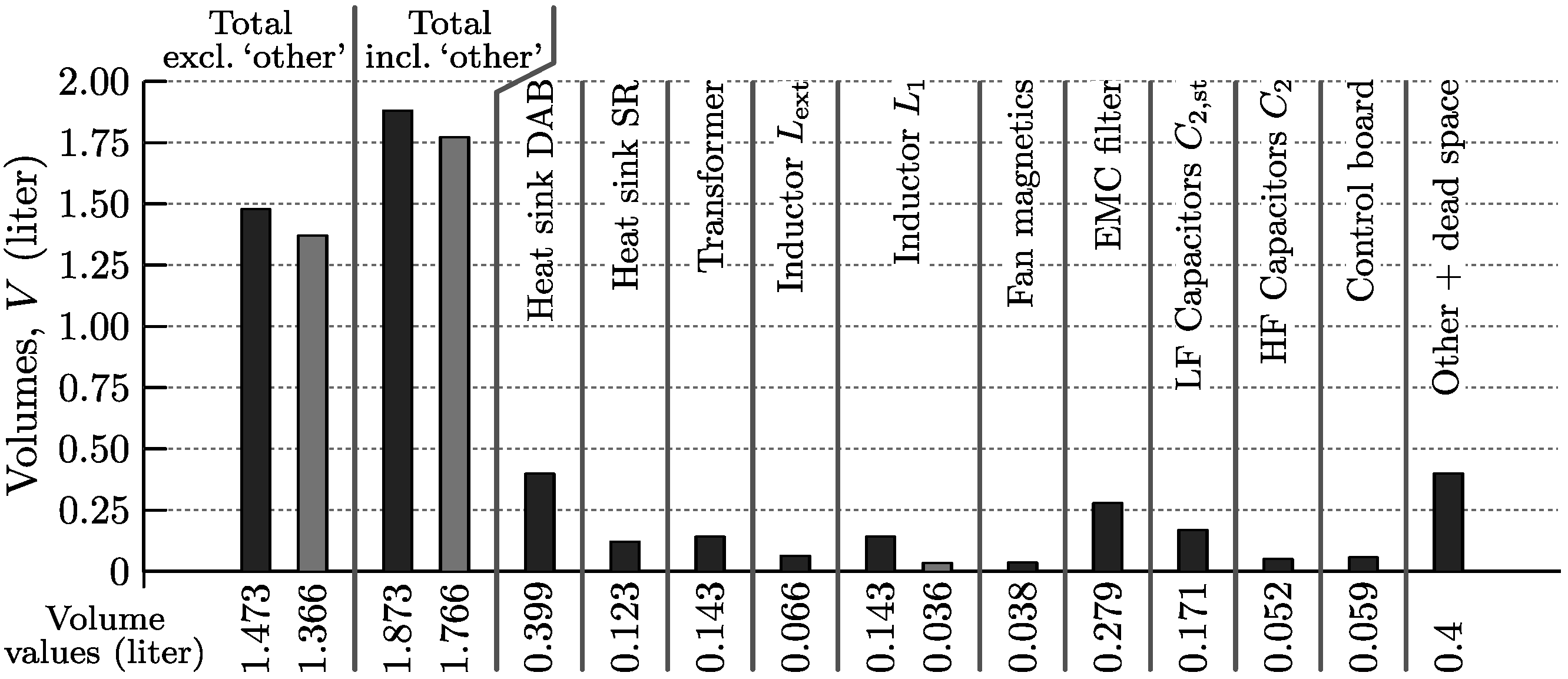
| Volume Definition | Design A (prot.) | Design B (opt.) | ||
|---|---|---|---|---|
| V(L) | ρ (kW/L) | V (L) | ρ (kW/L) | |
| Incl. “other + dead space” | 1.87 | 2 | 1.76 | 2.1 |
| Excl. “other + dead space” | 1.47 | 2.5 | 1.36 | 2.7 |
| Packing factor | ||||
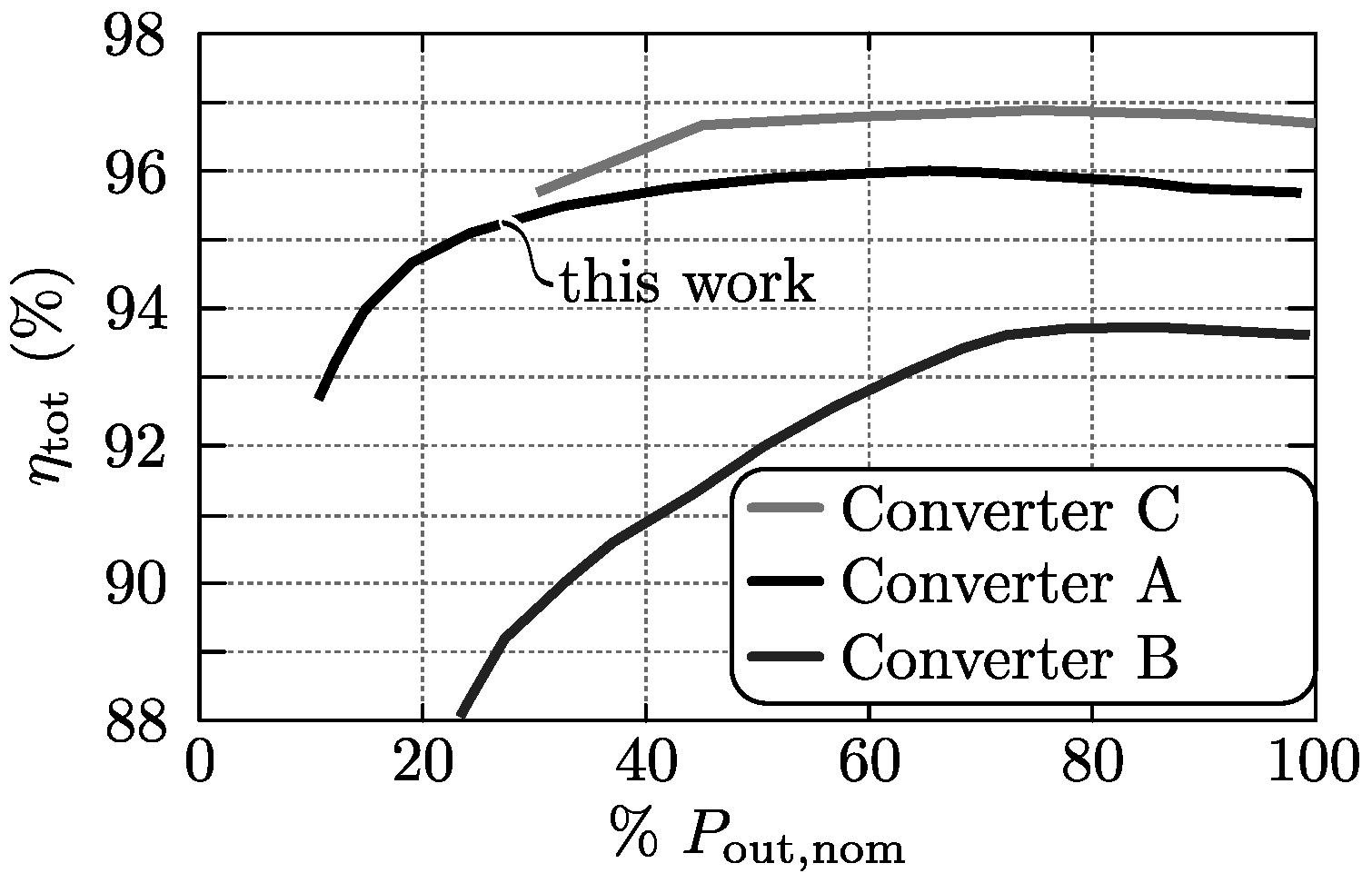
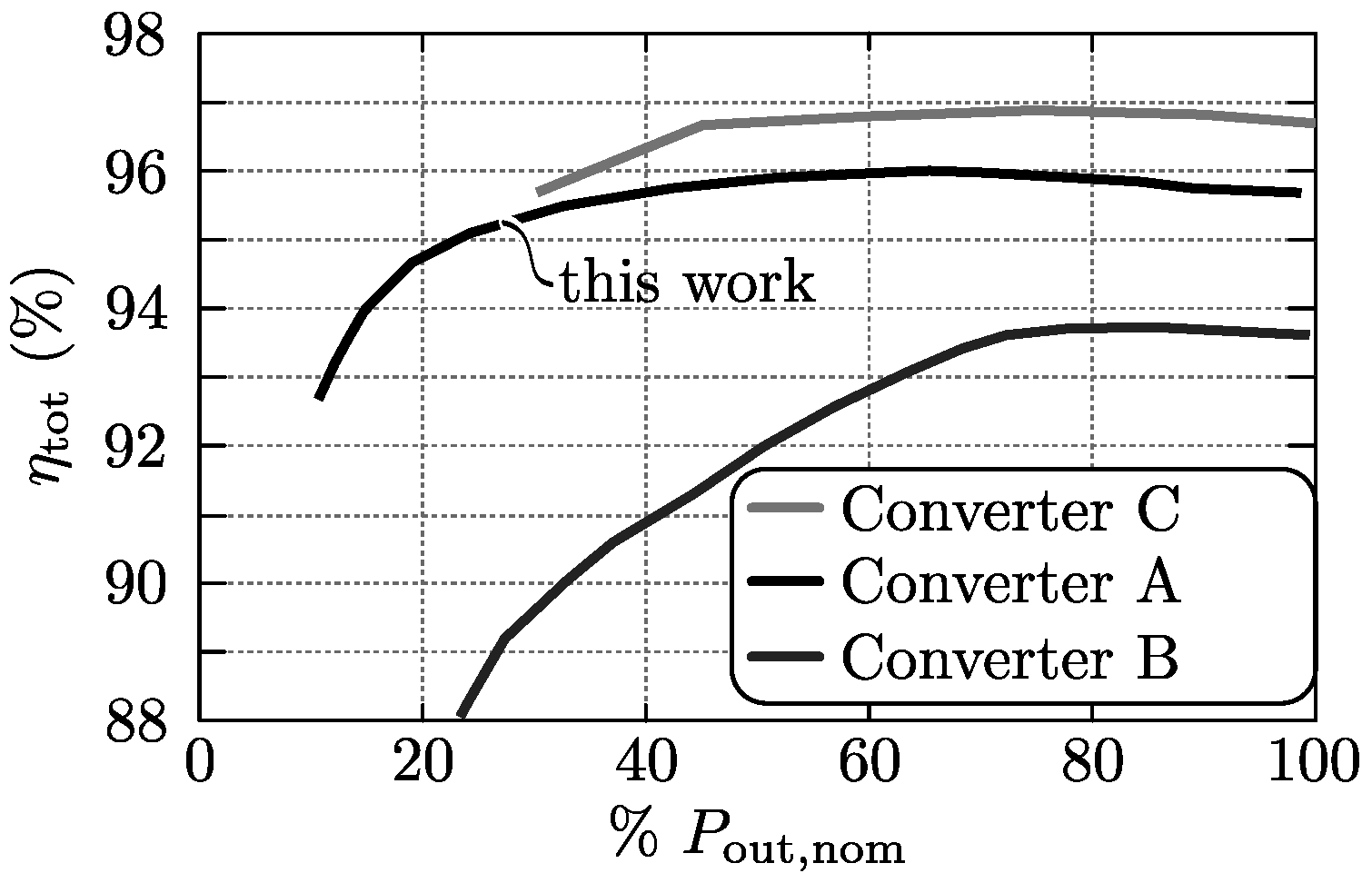
| Variable | Conv. A (This Work) | Conv. B [48] | Conv. C [49] |
|---|---|---|---|
| (V) | 230 | 240 | 230 |
| (V) | 400 | 400 | 48 |
| (kW) | 3.7 | 3.33 | 3.33 |
| (%) | 95.6 | 93.6 | 96.6 |
| ρ (kW/L) | 2 | 0.66 | 2.5 |
| Bidirectional | yes | no | no |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Everts, J. Design and Optimization of an Efficient (96.1%) and Compact (2 kW/dm3) Bidirectional Isolated Single-Phase Dual Active Bridge AC-DC Converter. Energies 2016, 9, 799. https://doi.org/10.3390/en9100799
Everts J. Design and Optimization of an Efficient (96.1%) and Compact (2 kW/dm3) Bidirectional Isolated Single-Phase Dual Active Bridge AC-DC Converter. Energies. 2016; 9(10):799. https://doi.org/10.3390/en9100799
Chicago/Turabian StyleEverts, Jordi. 2016. "Design and Optimization of an Efficient (96.1%) and Compact (2 kW/dm3) Bidirectional Isolated Single-Phase Dual Active Bridge AC-DC Converter" Energies 9, no. 10: 799. https://doi.org/10.3390/en9100799
APA StyleEverts, J. (2016). Design and Optimization of an Efficient (96.1%) and Compact (2 kW/dm3) Bidirectional Isolated Single-Phase Dual Active Bridge AC-DC Converter. Energies, 9(10), 799. https://doi.org/10.3390/en9100799