
Floating Platform and Mooring Line Optimization for Wake Loss Mitigation in Offshore Wind Farms Through Wake Mixing Strategy †


Abstract
1. Introduction
1.1. Prior Works on Wind Farm Flow Control
1.2. Objective and Motivation of the Present Work
- an optimization framework was developed with a simulation-based approach to optimize the floating platform and mooring lines of an FOWT;
- to enhance the yaw motion with beneficial effects on the “Helix” control strategy, an optimization problem was derived;
- two different optimized configurations were obtained to solve the optimization problem with a differential evolution algorithm.
2. Methodology
2.1. Baseline Configuration
- the DTU 10MW RWT is widely used in studies on floating offshore wind farms; its geometry and features are open-source and easily accessible through an online database [14];
- the use of three buoyant bodies can reduce the need for a large draft, which may limit the applicability of the studied configuration to sites with a considerable seabed depth in comparison with a single-spar configuration;
- other available configurations, such as tension leg platforms (TLP), may have larger frequencies, being incompatible with preliminary estimations of the expected required frequency for the application of the desired wake control technique [11];
- the geometry of the “Triple Spar” model seems more flexible, offering more parameters to be changed in the selection of the design variables compared to simpler geometries (such as a spar buoy).

2.2. Design Space
2.3. Design Assumptions
- Hydrostatic equilibrium and stability (influencing the most relevant mass and inertia properties);
- Economic feasibility;
- Compliant response to hydrodynamic loads (seakeeping analysis);
- Compliant mooring system;
- Good dynamics in fully coupled design load cases (DLC);
- Survival under critical load cases.
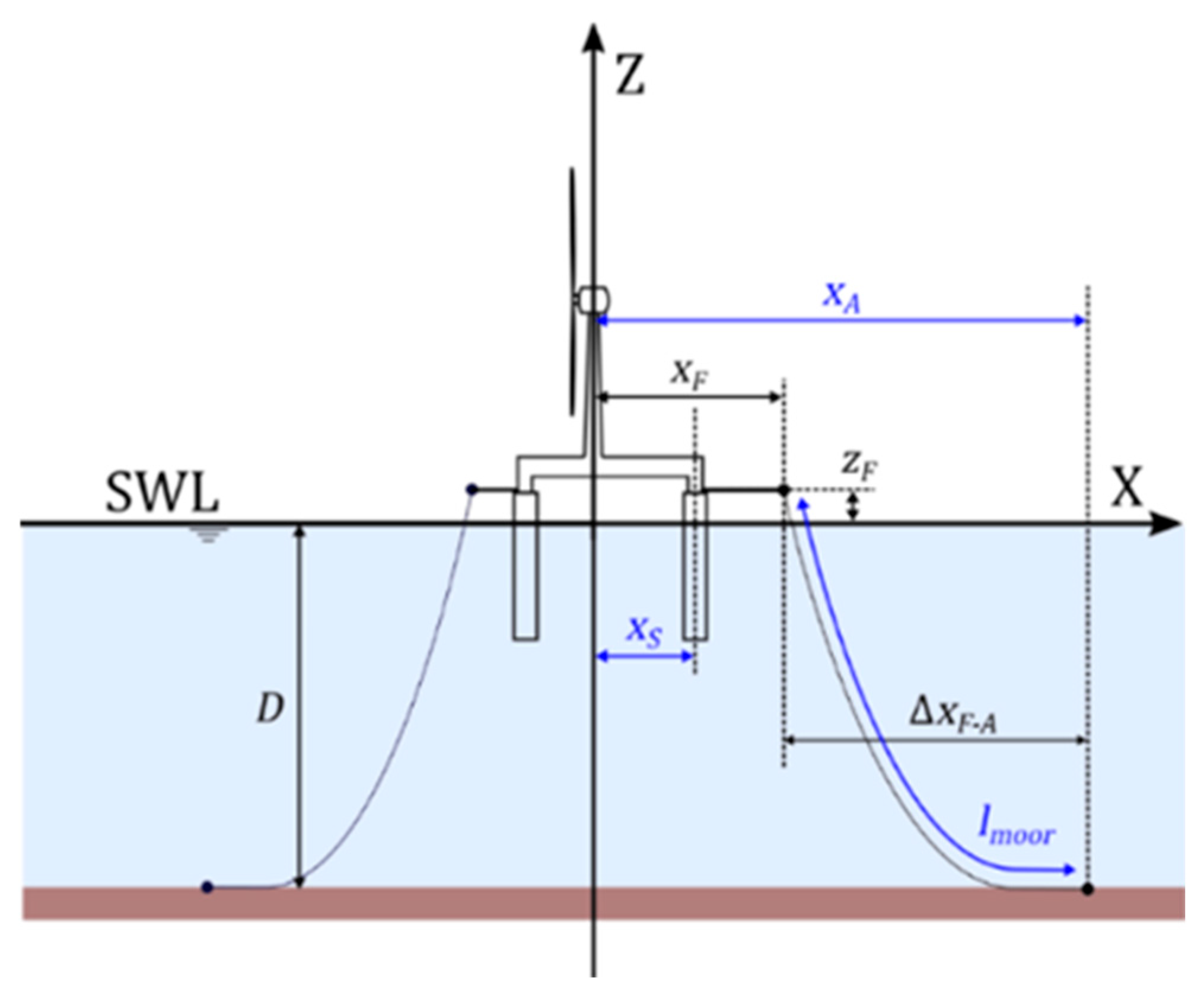
2.4. Buoyancy Equilibrium

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value | Unit |
|---|---|---|
| Minimum spar distance () | 23.4 | m |
| Reference spar distance () | 26.0 | m |
| Reference fairlead distance () | 54.5 | m |
| Minimum fairlead distance () | 51.9 | m |
| Water depth () | 180.0 | m |
| Reference fairlead height () | 8.0 | m |
| Maximum anchor distance () | 750.0 | m |
| Maximum mooring line length () | 839.7 | m |
| Reference weight of mooring lines () | 1087 | ton |
| Reference weight of mooring lines in water () | 949 | ton |
| Maximum weight of mooring lines in water () | 1314 | ton |
| Difference in weight of mooring lines in water () | 227 | ton |
| Reference total weight of FOWT including mooring lines in water | 30,290 | ton |
| Maximum difference in weight over the reference total weight of FOWT | 0.7 | % |
2.5. Hydrostatic Stability
2.6. Economic Feasibility
2.7. Cost Variation of Floating Platform
- the cost of the spars does not change due to modifications of the floating platform during the optimization;
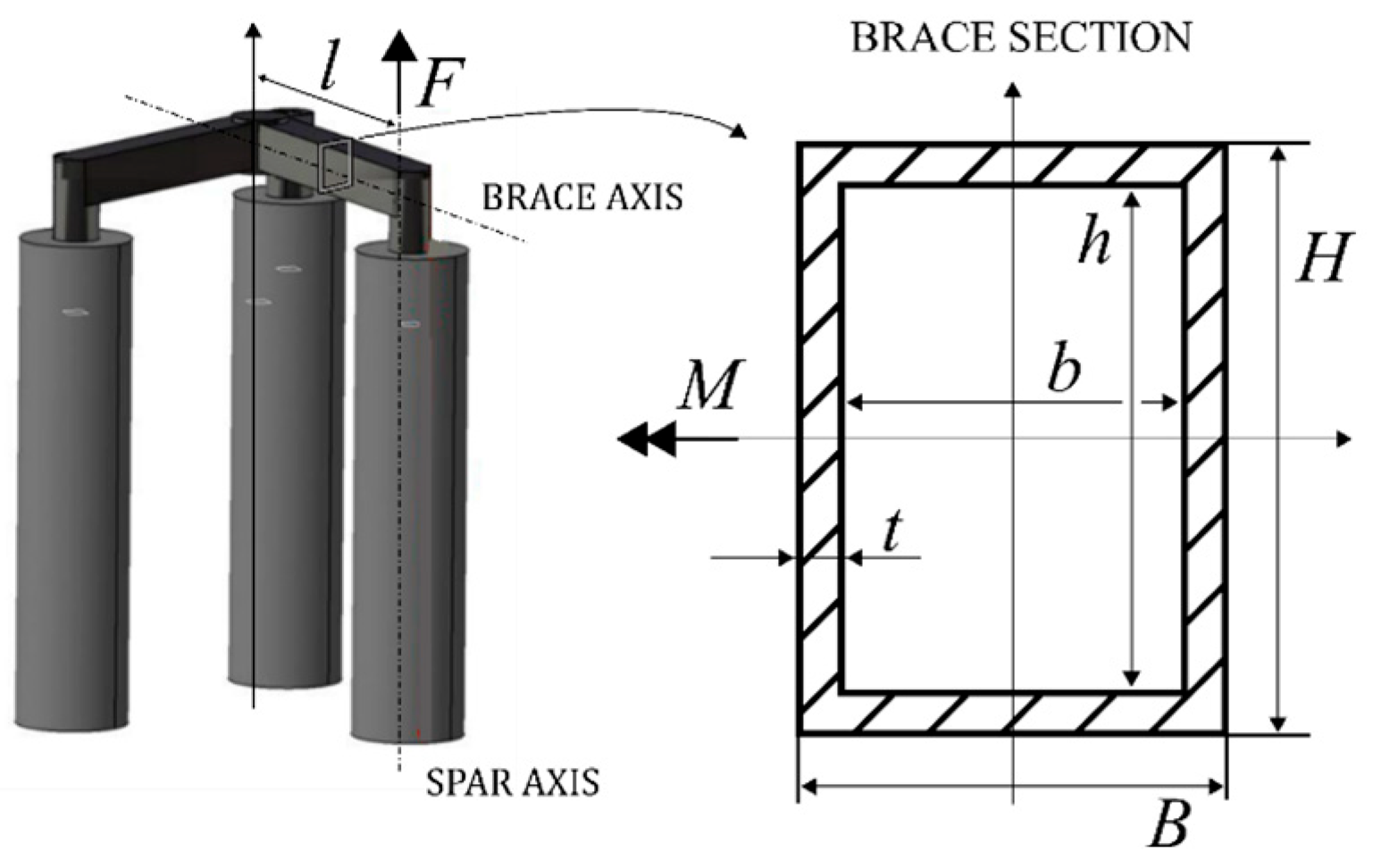
- the cost of the steel tripod structures changes as a direct function of the structure’s length (also related to the structure’s section size and overall material weight);
- the tripod structure’s length is assumed to be equal to the distance of the spars from the yaw axis ();
- to preserve the structural integrity of the floating platform, the same stress level in the tripod structures should be maintained.
2.8. Cost Variation of Mooring Lines
2.9. Optimization Framework
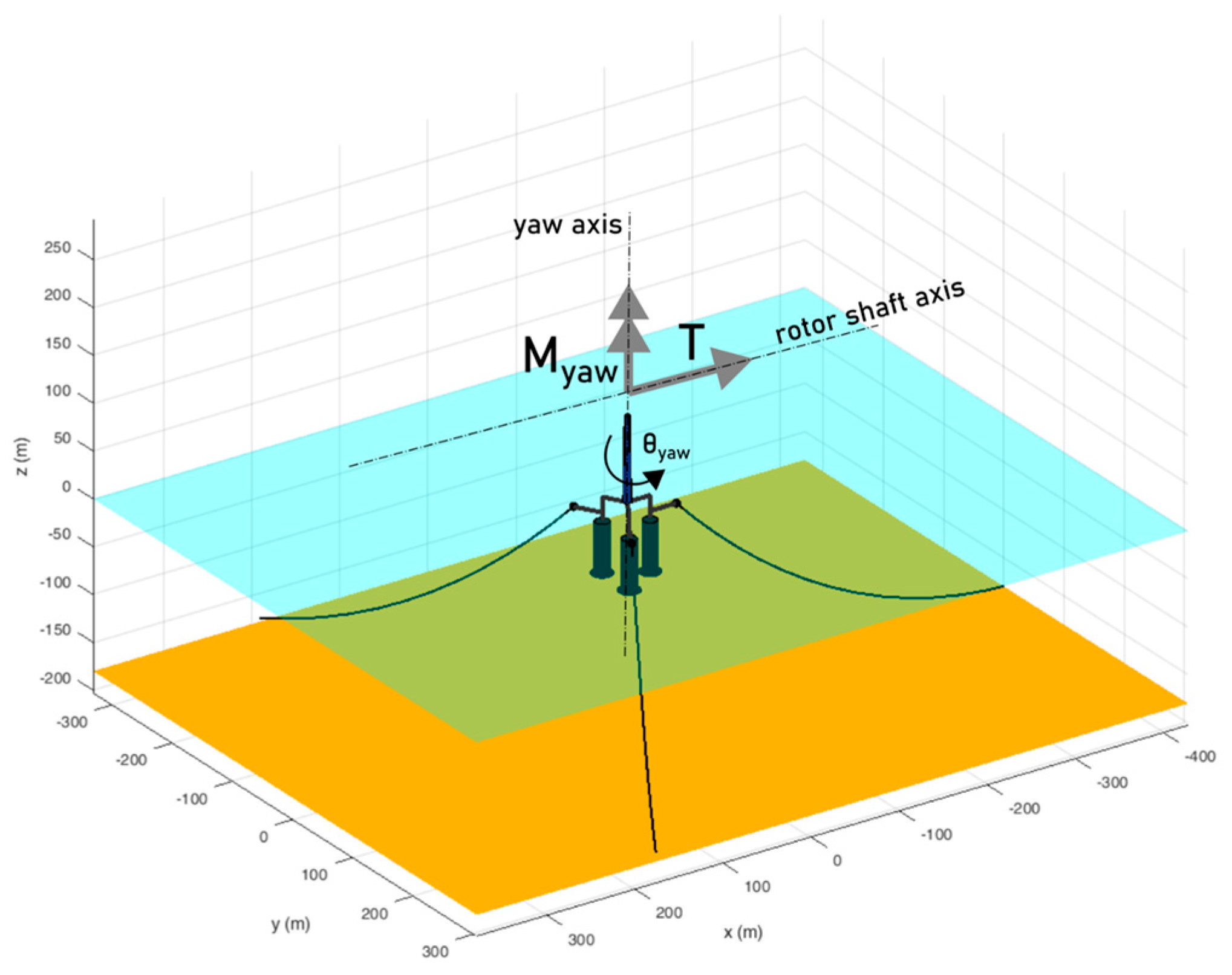
- Zero wind speed (the wake behavior and the loadings on the system are derived from previous studies [11]—to reduce the computational cost of the optimization, the estimated loading actions have been directly applied to the tower/platform assembly in order to evaluate and optimize the response of the support structure under the action of the Helix control strategy);
- A deactivated control system (as indicated in the previous point, the action of the Helix control system has been derived from previous studies);
- A fixed rotor.
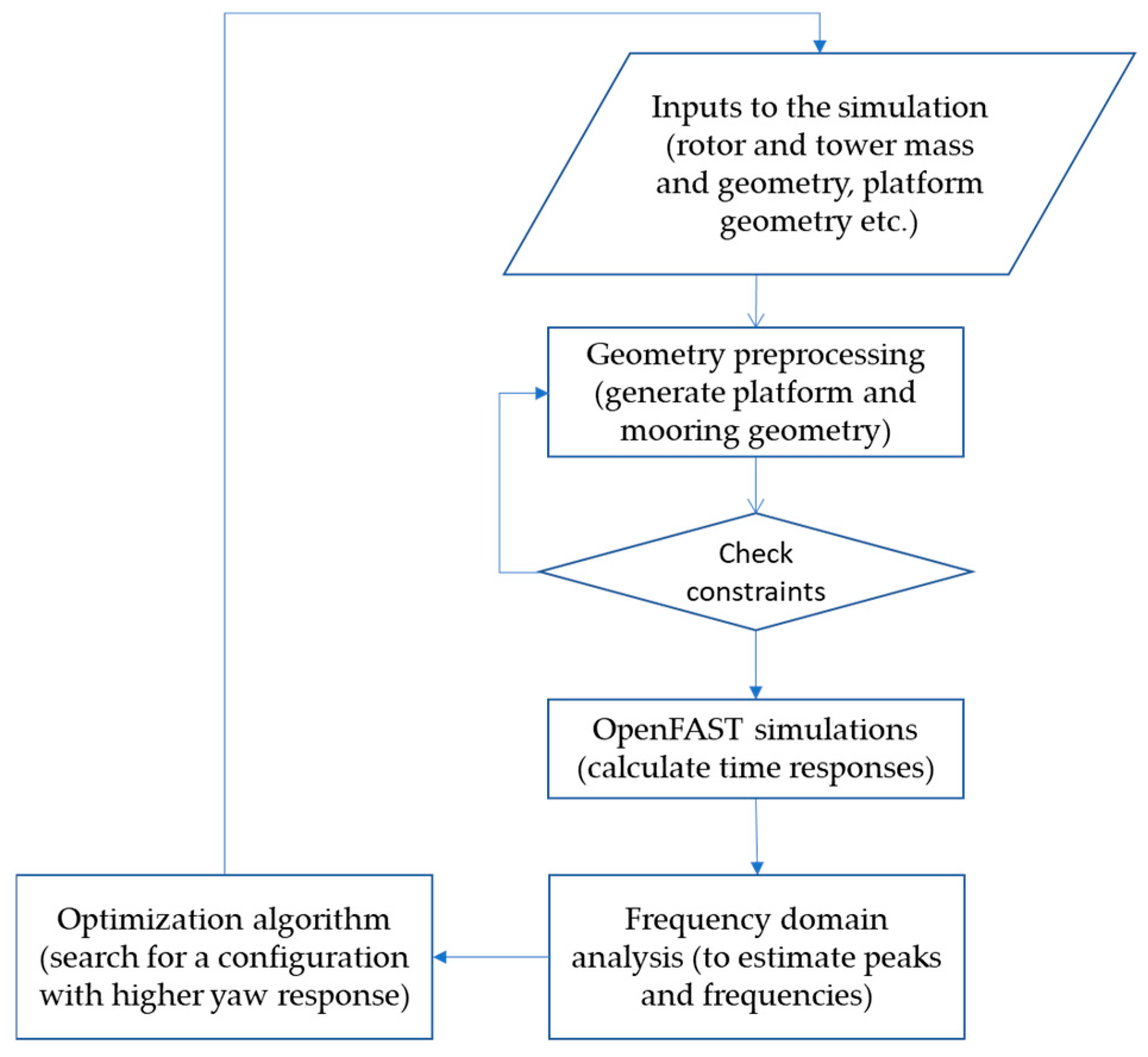
- The inputs to the simulation block can be classified as follows:
- Fixed configuration parameters (for example, rotor and tower mass and geometry, etc.);
- Operating characteristics and control (wind, control laws)—in this simplified analysis, the control and aerodynamic actions are simulated using prescribed external actions;
- Variable input parameters (for example, spar radius, draft, heave plate position, mooring cable length, fairlead positions, and anchor distance from the yaw axis).
- A pre-processor is implemented to define a consistent configuration (platform geometry and mooring lines’ integration with the wind turbine system). This part of the process generates a set of input files for the computation, describing a configuration based on the assigned input parameters. The pre-processor performs several operations:
- It generates the input files for the mooring system;
- It generates the surface mesh files needed for hydrodynamic calculation (using the open-source code Gmsh [15])—in this step, an equilibrium analysis is performed to set the platform in the equilibrium position around which hydrodynamic analyses are performed;
- It runs the hydrodynamic analysis to obtain the hydrodynamic coefficients in the frequency domain (using the open-source Python module Capytaine version 1.5, described in [16]), which are needed to describe the behavior of the platform’s interaction with water;
- It adds Morison’s coefficients for viscous damping directly in the OpenFAST input files;
- It performs a consistency check to verify that the physical constraints are not violated and to avoid unfeasible geometries.
- The design constraints are checked before performing OpenFAST simulations.
- The computation of the dynamic parameters of interest (oscillations and loads) is performed using OpenFAST time-domain simulations. Once the geometries and the hydrodynamic data are determined, a simulation is carried out. The results are post-processed and analyzed to obtain the desired information (a simulation time must be set at this stage).
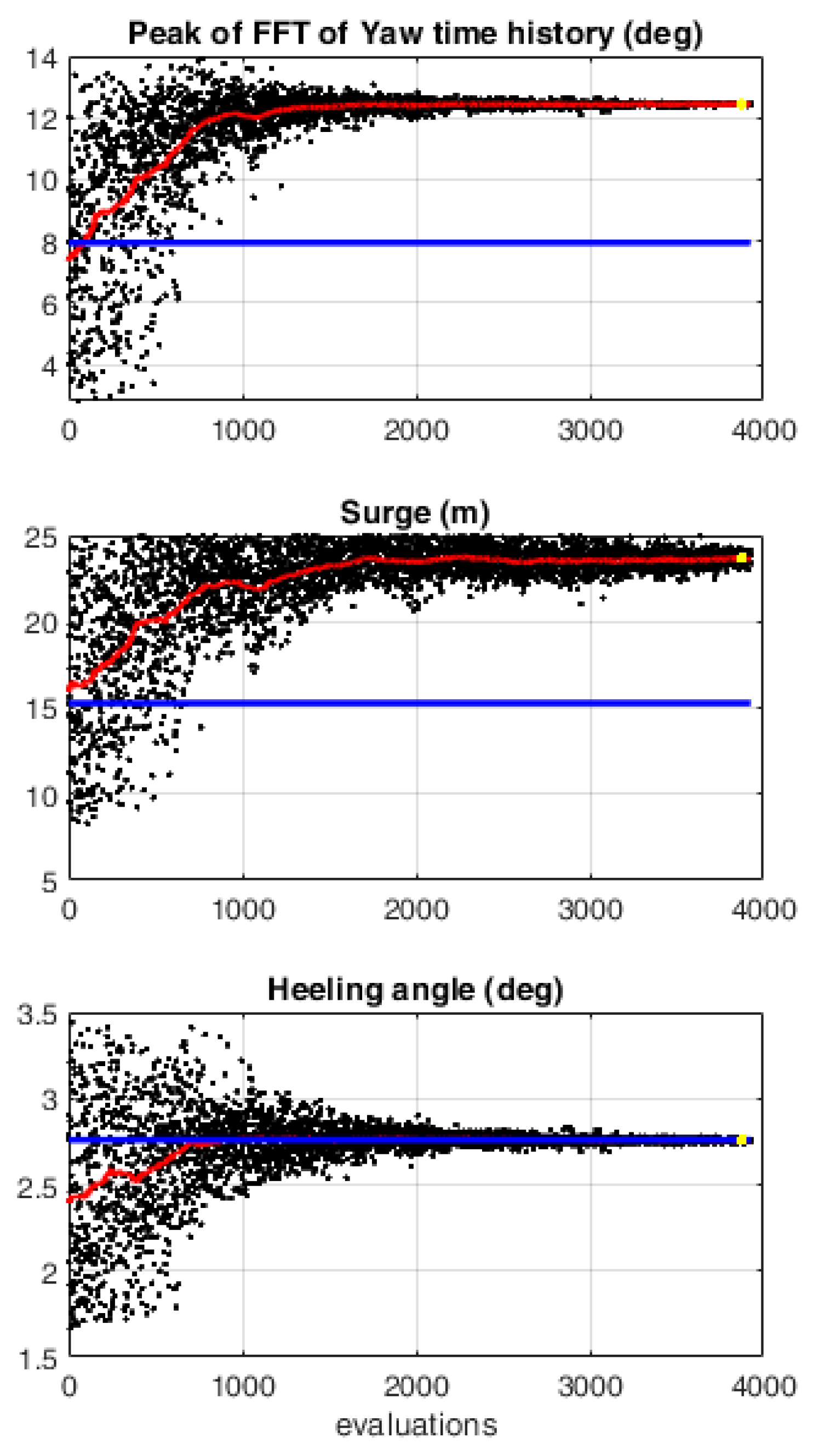
- A frequency-domain analysis of selected time histories can be implemented at this stage to estimate the peak value of the yaw motion amplitude, which is included in the objective function of the optimization algorithm (described in more detail in the next section).
3. Results
3.1. Optimization Definition
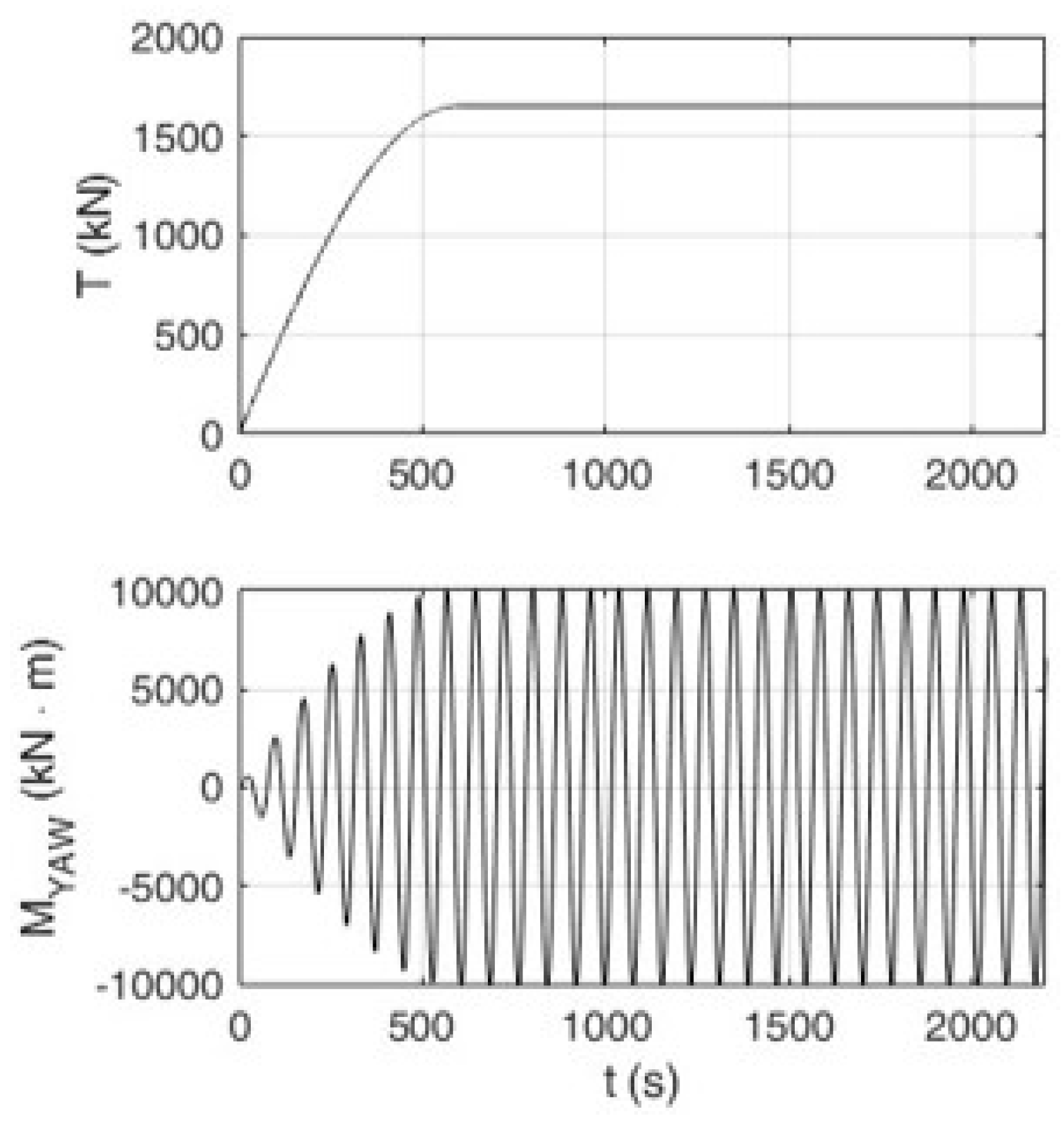
3.2. Simulation Setup and Response Analysis
- still air;
- still water;
- a deactivated control system;
- a fixed rotor;
- a constant force applied along the rotor shaft axis, modeling the rated thrust of the rotor.
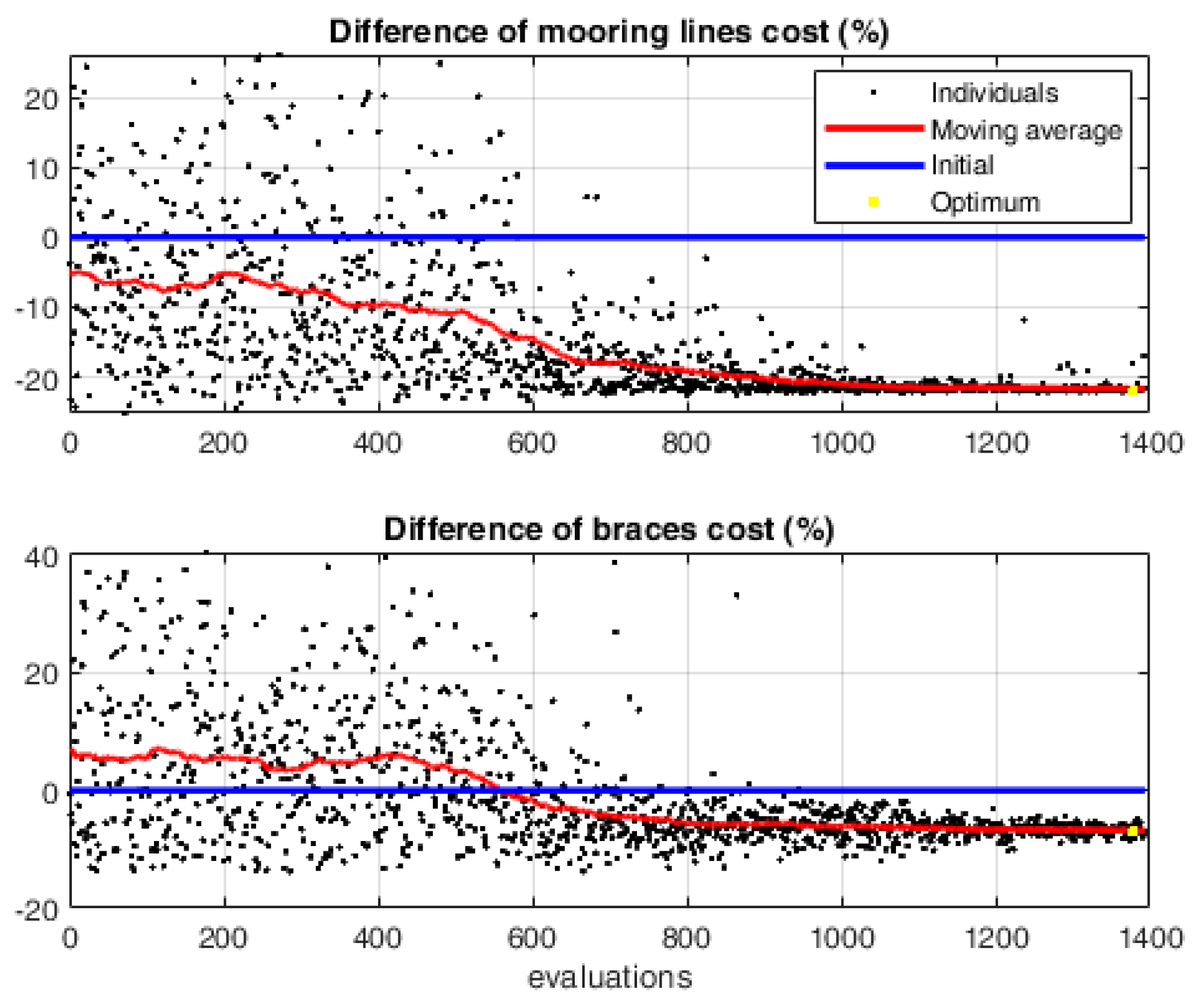
3.3. Optimization Results
- It provides a slight improvement in the modeling accuracy of the control action, directly accounting for the effective input yaw moment related to the adopted control strategy, instead of considering the free decay response;
- It allows the evaluation of the motion response amplitude for a given frequency and amplitude of the excitation input yaw moment, instead of simply seeking a desired peak frequency, thus providing more information to evaluate the effectiveness of the control strategy to be optimized in the next stage of the work.
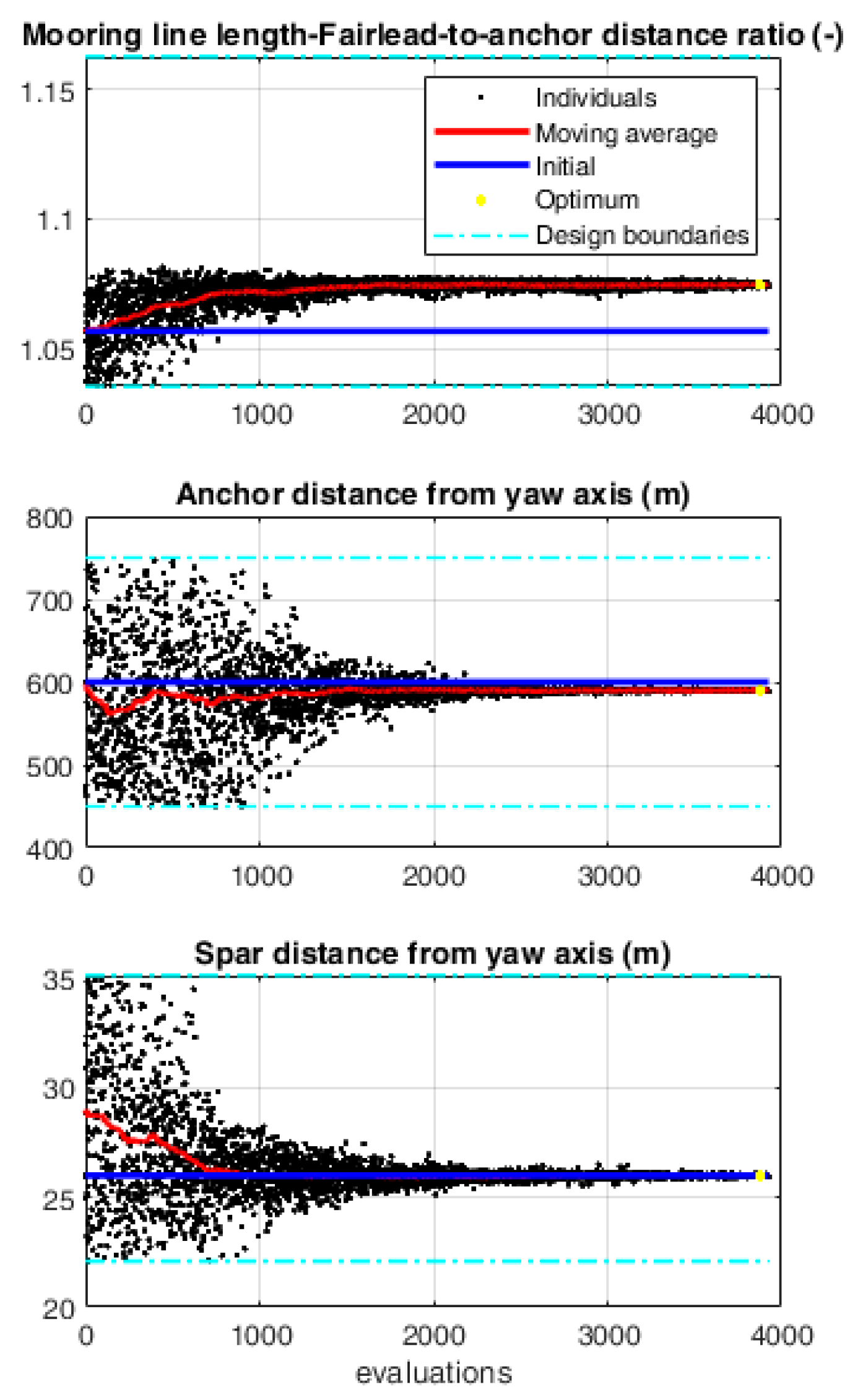
3.4. First Optimization Run
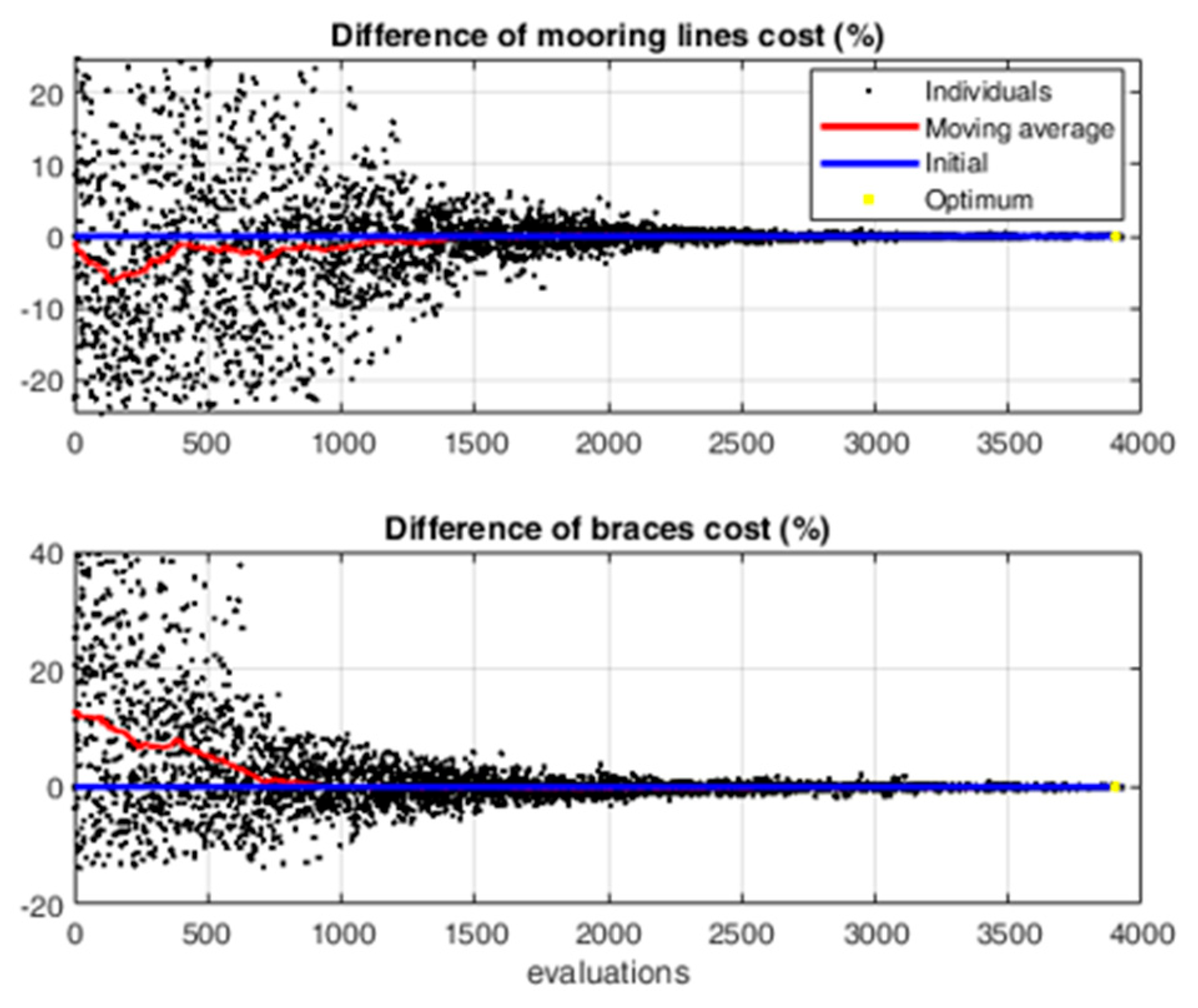
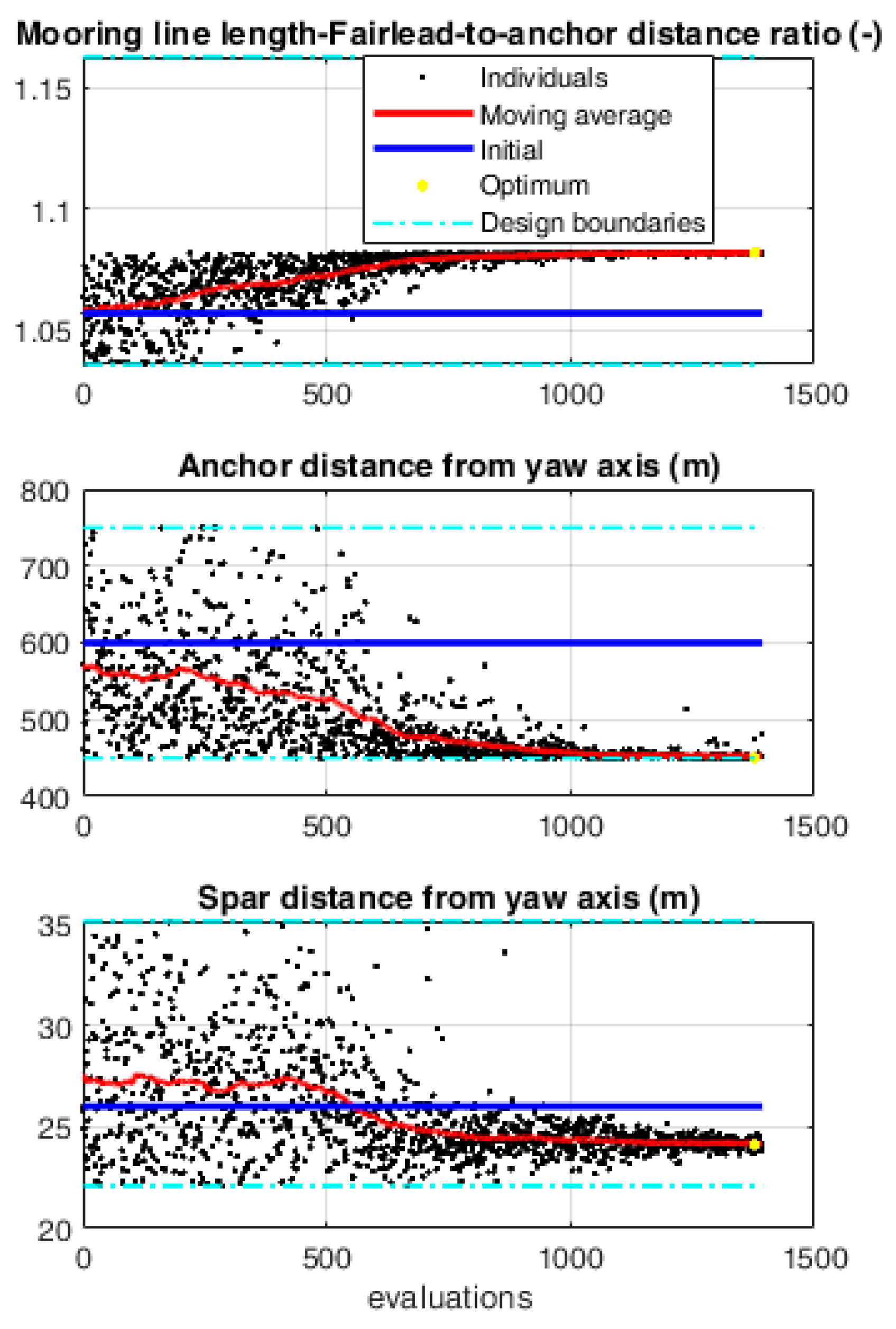
3.5. Second Optimization Run
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- CATAPULT Offshore Renewable Energy. Floating Offshore Wind: Cost Reduction Pathways to Subsidy Free. January 2021. Available online: https://ore.catapult.org.uk/wp-content/uploads/2021/01/FOW-Cost-Reduction-Pathways-to-Subsidy-Free-report-.pdf (accessed on 16 January 2024).
- Jensen, M.K. Update of recent trends (Offshore). In Proceedings of the 6th Wind Energy Systems Engineering Workshop, Boulder, CO, USA, 29 August–1 September 2022. [Google Scholar]
- Eikrem, K.S.; Lorentzen, R.J.; Faria, R.; Stordal, A.S.; Godard, A. Offshore wind farm layout optimization using ensemble methods. Renew. Energy 2023, 216, 119061. [Google Scholar] [CrossRef]
- Lerch, M.J.; Prada Gil, M.D.; Molins i Borrell, C. A metaheuristic optimization model for the inter-array layout planning of floating offshore wind farms. Int. J. Electr. Power Energy Syst. 2021, 131, 107128. [Google Scholar] [CrossRef]
- Meyers, J.; Bottasso, C.; Dykes, K.; Fleming, P.; Gebraad, P.; Giebel, G.; Göçmen, T.; van Wingerden, J.-W. Wind farm flow control: Prospects and challenges. Wind Energy Sci. Discuss. 2022, 7, 2271–2306. [Google Scholar] [CrossRef]
- Fleming, P.; Annoni, J.; Shah, J.J.; Wang, L.; Ananthan, S.; Zhang, Z.; Hutchings, K.; Wang, P.; Chen, W.; Chen, L. Field test of wake steering at an offshore wind farm. Wind Energy Sci. 2017, 2, 229–239. [Google Scholar] [CrossRef]
- Silva, J.G.; Ferrari, R.; van Wingerden, J.W. Wind farm control for wake-loss compensation, thrust balancing and load-limiting of turbines. Renew. Energy 2023, 203, 421–433. [Google Scholar] [CrossRef]
- OpenFAST Repository. Available online: https://github.com/OpenFAST/openfast (accessed on 28 April 2024).
- Eiben, A.E.; Smith, J.E. Introduction to Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Abbas, N.J.; Bortolotti, P.; Kelley, C.; Paquette, J.; Pao, L.; Johnson, N. Aero-servo-elastic co-optimization of large wind turbine blades with distributed aerodynamic control devices. Wind Energy 2023, 26, 763–785. [Google Scholar] [CrossRef]
- Van den Berg, D.; de Tavernier, D.; van Wingerden, J.W. Using The Helix Mixing Approach On Floating Offshore Wind Turbines. J. Phys. Conf. Ser. 2022, 2265, 042011. [Google Scholar] [CrossRef]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Hansen, M.H.; Blasques, J.P.; Gaunaa, M.; Natarajan, A. The DTU 10-MW Reference Wind Turbine; DTU Orbit: Kongens Lyngby, Denmark, 2013. [Google Scholar]
- Lemmer, F.; Raach, S.; Schlipf, D.; Guzmán, R.F. Definition of the SWE-TripleSpar Floating Platform for the DTU 10MW Reference Wind Turbine; Institute of Aircraft Design, Univerisity of Stuttgart: Stuttgart, Germany, 2016. [Google Scholar]
- DTU 10MW Reference Wind Turbine Repository. Available online: https://nrel.github.io/turbine-models/DTU_10MW_178_RWT_v1.html (accessed on 26 May 2025).
- Ikhennicheu, M.; Lynch, M.; Doole, S.; Borisadem, F.; Matha, D.; Dominguez, J.L.; Vicente, R.D.; Habekost, T.; Ramirez, L.; Potestio, S.; et al. D2.1—Review of the State of the Art of Mooring and Anchoring Designs, Technical Challenges and Identification of Relevant DLCs; Corewind, EU Funded Project: 2020. Available online: https://corewind.eu/ (accessed on 26 May 2025).
- Wang, S.; Moan, T. Serviceability Limit State Assessment of Semi-Submersible Floating Wind Turbines. J. Offshore Mech. Arct. Eng. 2024, 146, 022003. [Google Scholar] [CrossRef]
- Azcona, J.; Vittori, F.; Schmidt, U.; Savenije, F.; Kapogiannis, X.K.G.; Manolas, D.; Voutsinas, S.; Amann, F.; Faerron-Guzmán, R.; Lemmer, F. Design Solutions for 10MW Floating Offshore Wind Turbines; INNWIND.EU, EU funded project, Deliverable D4.37; 2017. Available online: https://www.innwind.eu/ (accessed on 26 May 2025).
- Lazzerini, G.; Coiro, D.P.; Troise, G. Optimization of a floating offshore wind turbine platform and mooring lines according to an innovative wind farm wake control technique. In Proceedings of the 7th Offshore Energy & Storage Symposium (OSES 2023), St. Julian’s, Malta, 12–14 July 2023. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Lampinen, J. A constraint handling approach for the differential evolution algorithm. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No. 02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2. [Google Scholar]

| Property | Value | Unit |
|---|---|---|
| Diameter | 178.23 | m |
| Hub height | 119 | m |
| Tower height | 90.630 | m |
| Total mass | 29,341.5 | ton |
| Nacelle yaw inertia | 7326 | kg∙m2 |
| Platform yaw inertia | 2.0235 × 1010 | kg∙m2 |
| Property | Value | Unit |
|---|---|---|
| Unstretched length | 610 | m |
| Cable diameter | 0.31 | m |
| Mass density | 594 | kg/m |
| Stiffness | 1.38 × 109 | N |
| Design Variable | Reference Value | Range of Variation | |
|---|---|---|---|
| Platform | Min | Max | |
| Spar distance from yaw axis () | 26 m | 23.4 m | 33.8 m |
| Mooring Lines | Min | Max | |
| Mooring line length factor () as defined in Equation (1) | 1.057 | 1.040 | 1.152 |
| Anchor distance from yaw axis () | 600 m | 450 m | 750 m |
| Design Variables | Starting Config. | Optimal Config. 1 | Optimal Config. 2 |
|---|---|---|---|
| Platform | |||
| Spar distance from yaw axis () | 26.0 m | 26.0 m | 24.1 m |
| Mooring | |||
| Mooring line length factor () | 1.057 | 1.075 | 1.082 |
| Anchor distance from yaw axis () | 600.0 m | 589.2 m | 451.6 m |
| Output variables | |||
| Yaw amplitude ( | 7.9 deg | 12.0 deg | 13.6 deg |
| Difference in mooring line costs | - | - | −22% |
| Difference in brace costs | - | - | −7% |
| Surge excursion at rated thrust | 15.0 m | 24.0 m | 25.0 m |
| Heel angle with rated thrust | 2.0° | 2.8° | 3.1° |
| Mooring line length | 609.9 m | 609.7 m | 475.0 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazzerini, G.; Troise, G.; Coiro, D.P. Floating Platform and Mooring Line Optimization for Wake Loss Mitigation in Offshore Wind Farms Through Wake Mixing Strategy. Energies 2025, 18, 2813. https://doi.org/10.3390/en18112813
Lazzerini G, Troise G, Coiro DP. Floating Platform and Mooring Line Optimization for Wake Loss Mitigation in Offshore Wind Farms Through Wake Mixing Strategy. Energies. 2025; 18(11):2813. https://doi.org/10.3390/en18112813
Chicago/Turabian StyleLazzerini, Guido, Giancarlo Troise, and Domenico P. Coiro. 2025. "Floating Platform and Mooring Line Optimization for Wake Loss Mitigation in Offshore Wind Farms Through Wake Mixing Strategy" Energies 18, no. 11: 2813. https://doi.org/10.3390/en18112813
APA StyleLazzerini, G., Troise, G., & Coiro, D. P. (2025). Floating Platform and Mooring Line Optimization for Wake Loss Mitigation in Offshore Wind Farms Through Wake Mixing Strategy. Energies, 18(11), 2813. https://doi.org/10.3390/en18112813