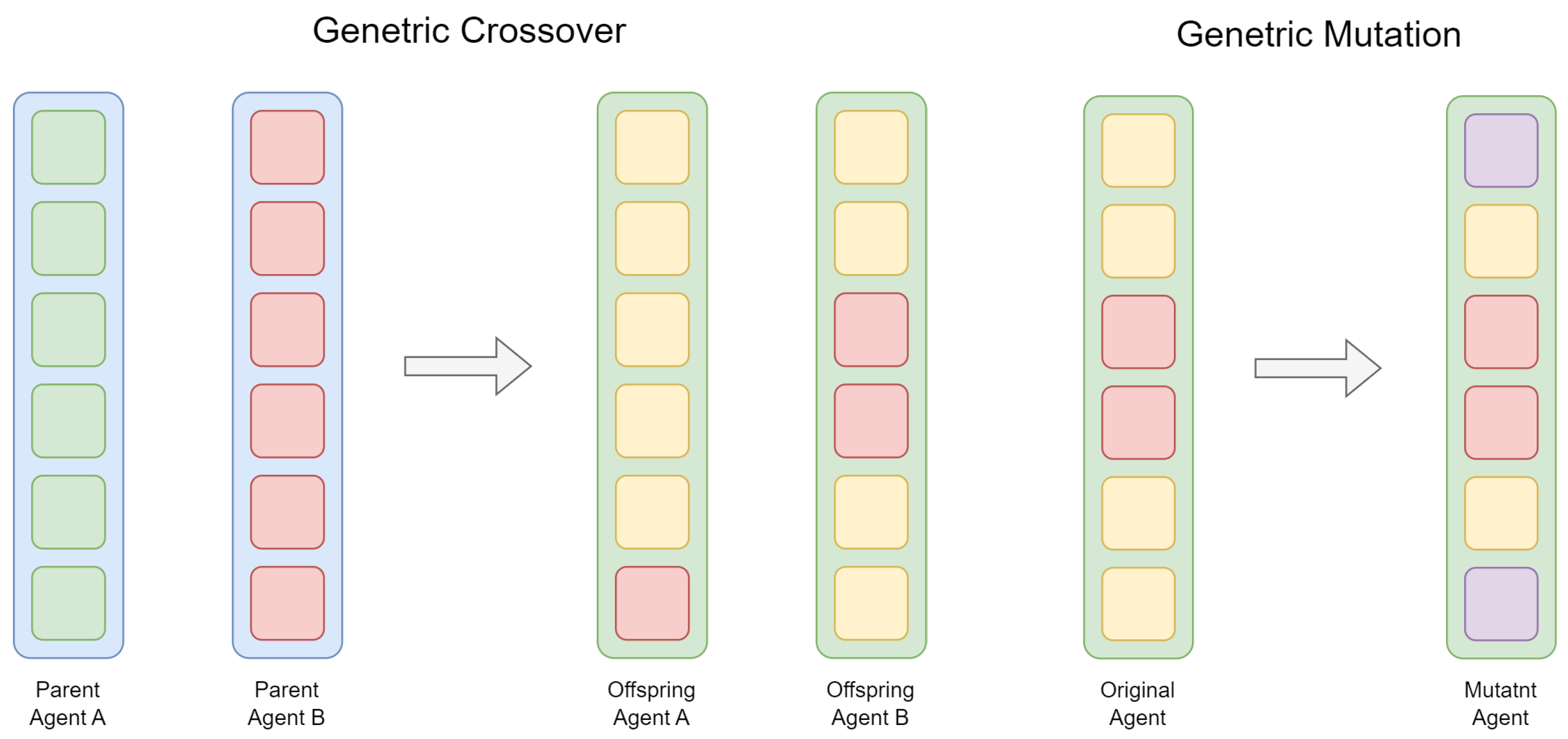
Figure 1.
Genetic crossover and mutation mechanisms.
Figure 1.
Genetic crossover and mutation mechanisms.
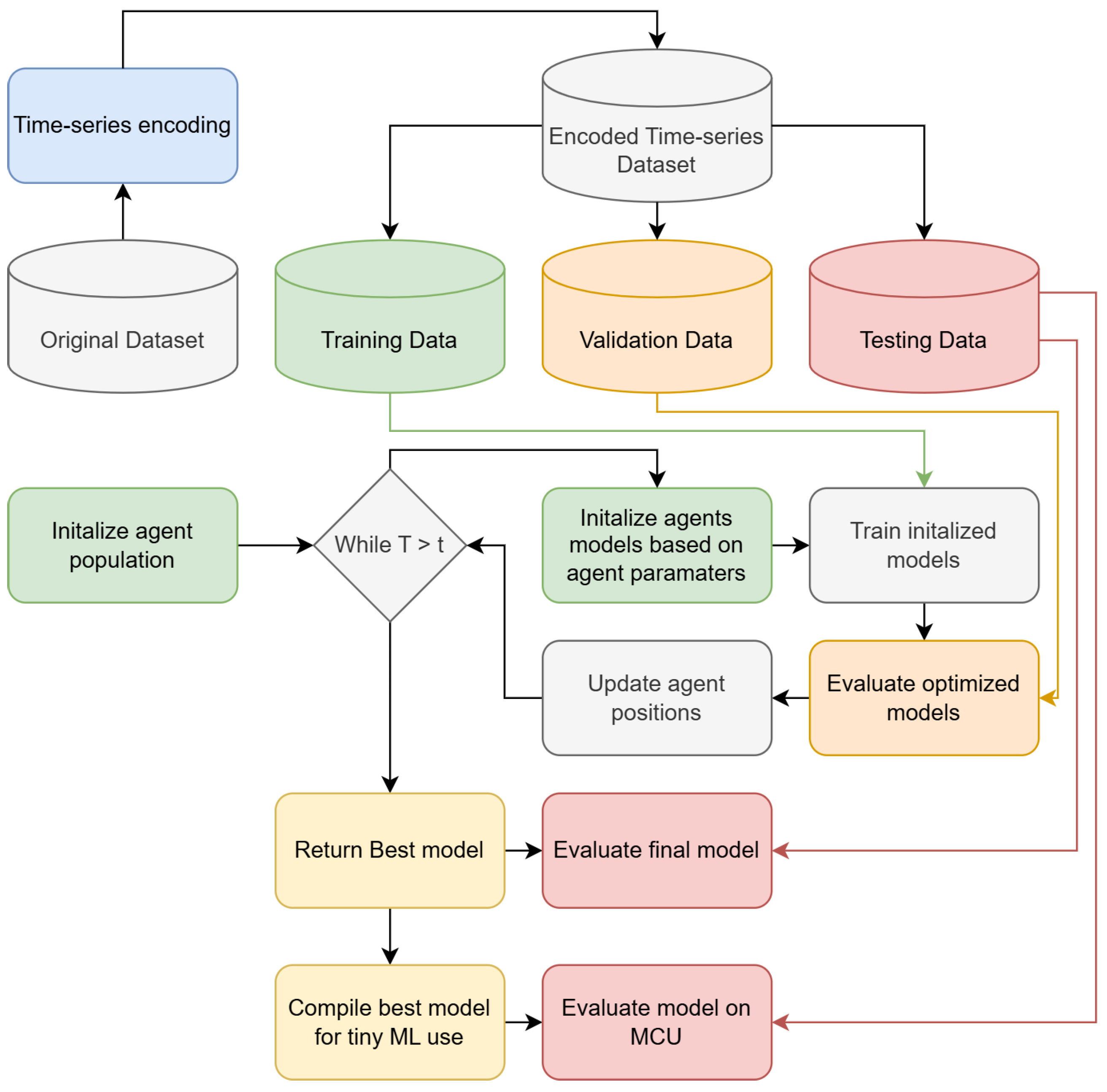
Figure 2.
Proposed framework flowchart.
Figure 2.
Proposed framework flowchart.
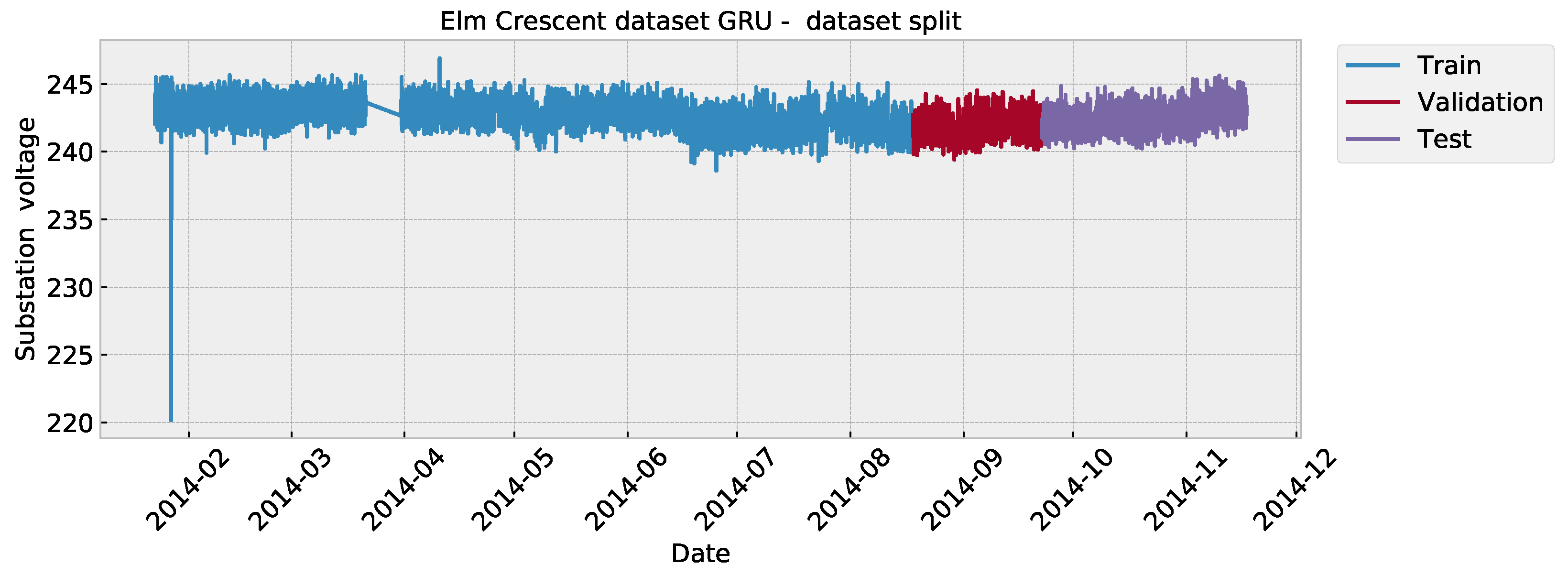
Figure 3.
Elm Crescent dataset visualization.
Figure 3.
Elm Crescent dataset visualization.
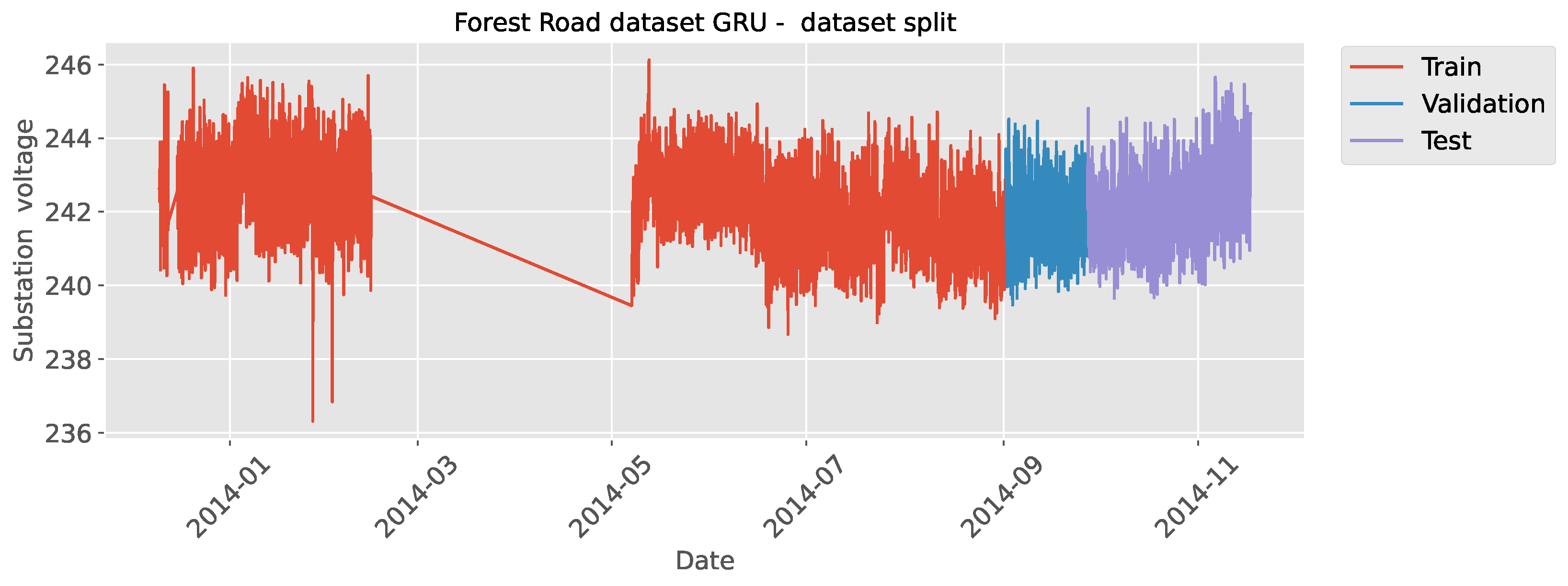
Figure 4.
Forest Road dataset visualization.
Figure 4.
Forest Road dataset visualization.
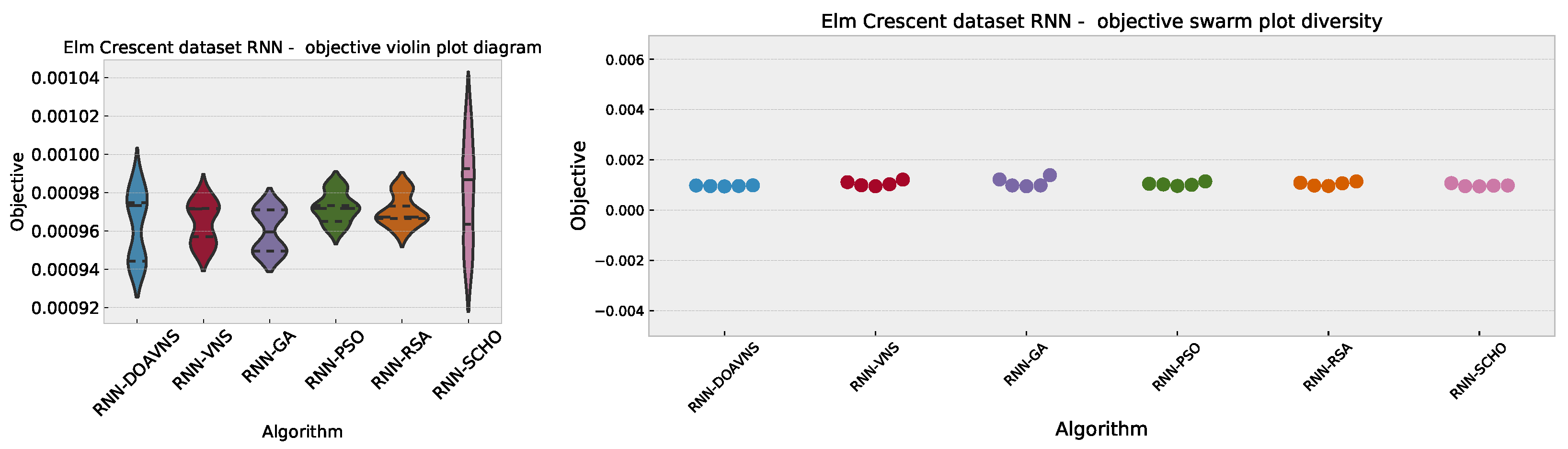
Figure 5.
Elm Crescent RNN simulations’ objective function distribution diagrams.
Figure 5.
Elm Crescent RNN simulations’ objective function distribution diagrams.
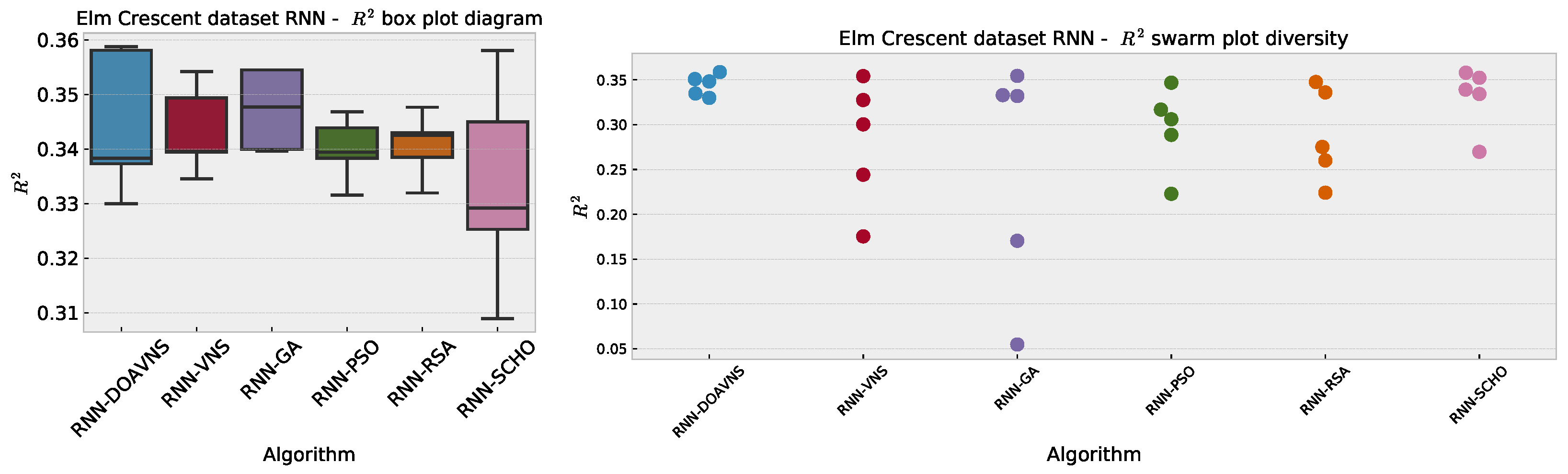
Figure 6.
Elm Crescent RNN simulations’ indicator function distribution diagrams.
Figure 6.
Elm Crescent RNN simulations’ indicator function distribution diagrams.
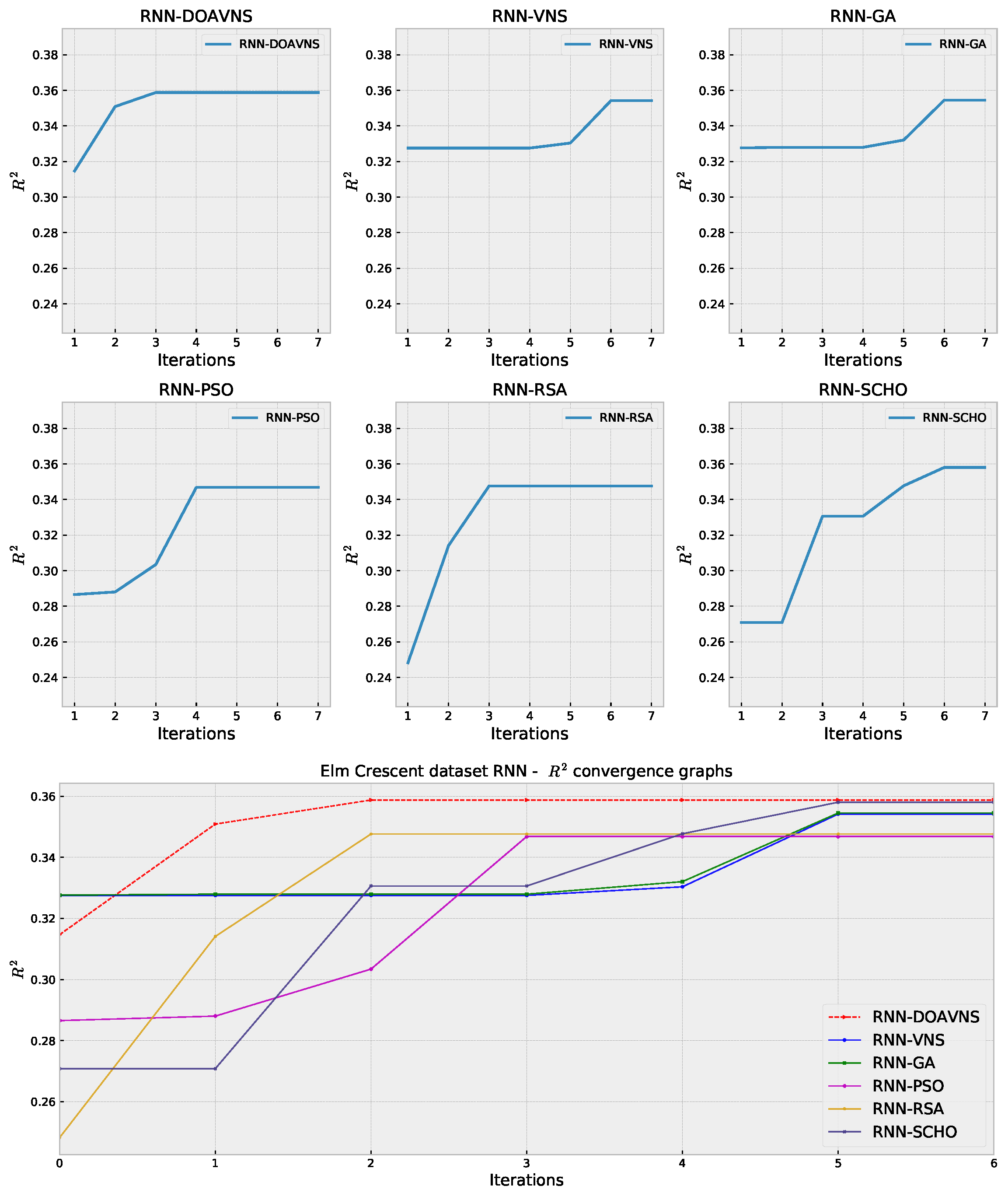
Figure 7.
Elm Crescent RNN simulations’ objective function convergence diagrams.
Figure 7.
Elm Crescent RNN simulations’ objective function convergence diagrams.
Figure 8.
Elm Crescent RNN simulations’ indicator function convergence diagrams.
Figure 8.
Elm Crescent RNN simulations’ indicator function convergence diagrams.
Figure 9.
Forecasts of best DOAVNS model from Elm Crescent RNN simulations.
Figure 9.
Forecasts of best DOAVNS model from Elm Crescent RNN simulations.
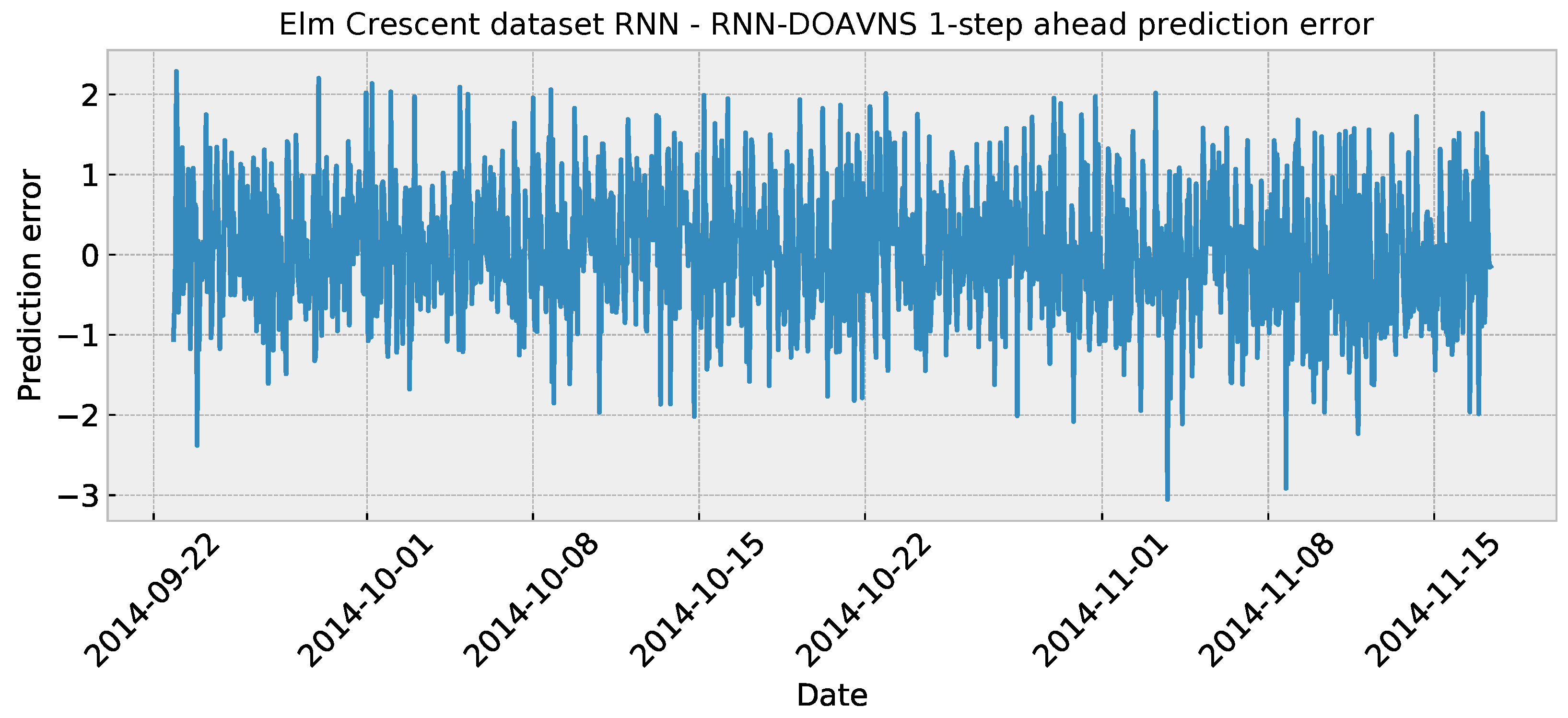
Figure 10.
Elm Crescent RNN simulations’ error over time.
Figure 10.
Elm Crescent RNN simulations’ error over time.
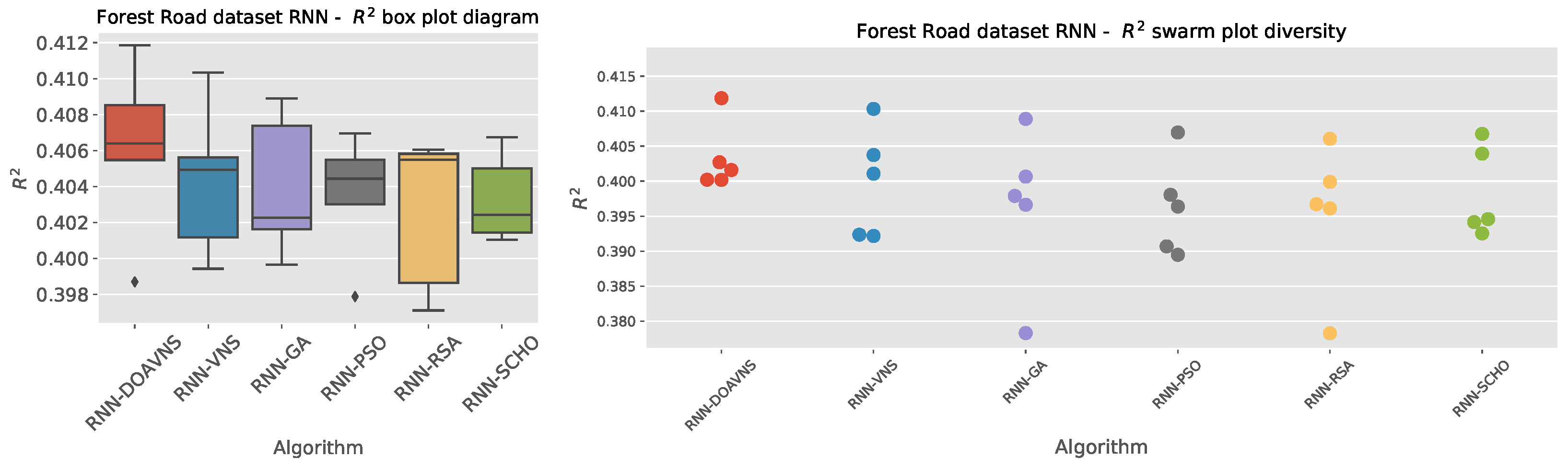
Figure 11.
Forest Road RNN simulations’ objective function distribution diagrams.
Figure 11.
Forest Road RNN simulations’ objective function distribution diagrams.
Figure 12.
Forest Road RNN simulations’ indicator function distribution diagrams.
Figure 12.
Forest Road RNN simulations’ indicator function distribution diagrams.
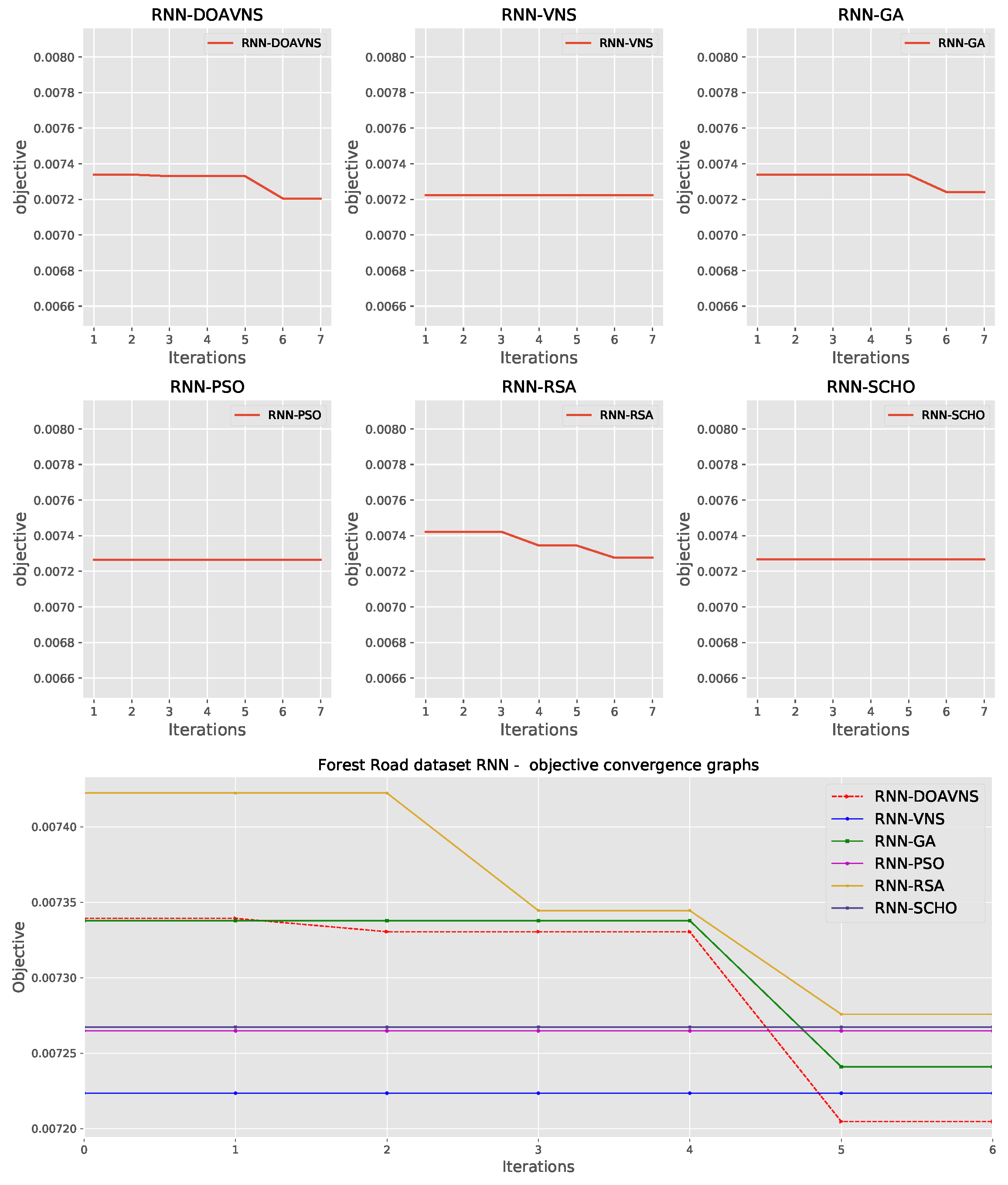
Figure 13.
Forest Road RNN simulations’ objective function convergence diagrams.
Figure 13.
Forest Road RNN simulations’ objective function convergence diagrams.
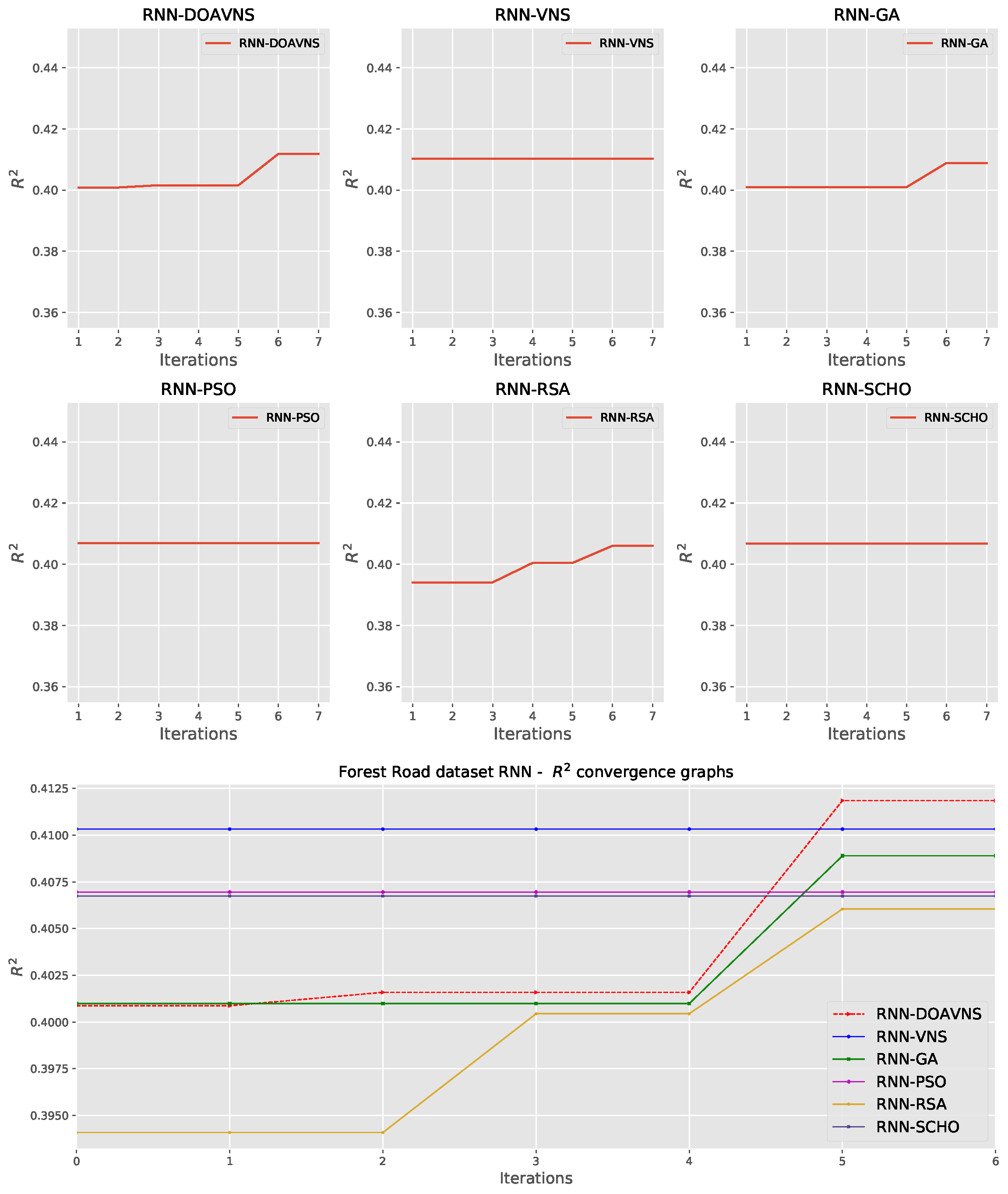
Figure 14.
Forest Road RNN simulations’ indicator function convergence diagrams.
Figure 14.
Forest Road RNN simulations’ indicator function convergence diagrams.
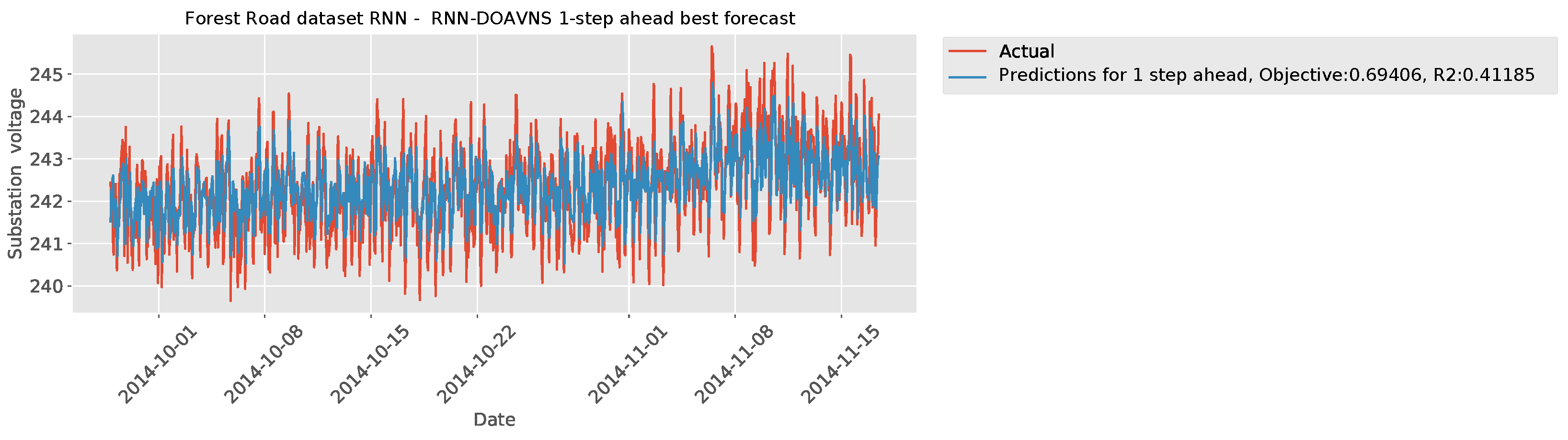
Figure 15.
Forecasts of best DOAVNS model from Forest Road RNN simulations.
Figure 15.
Forecasts of best DOAVNS model from Forest Road RNN simulations.
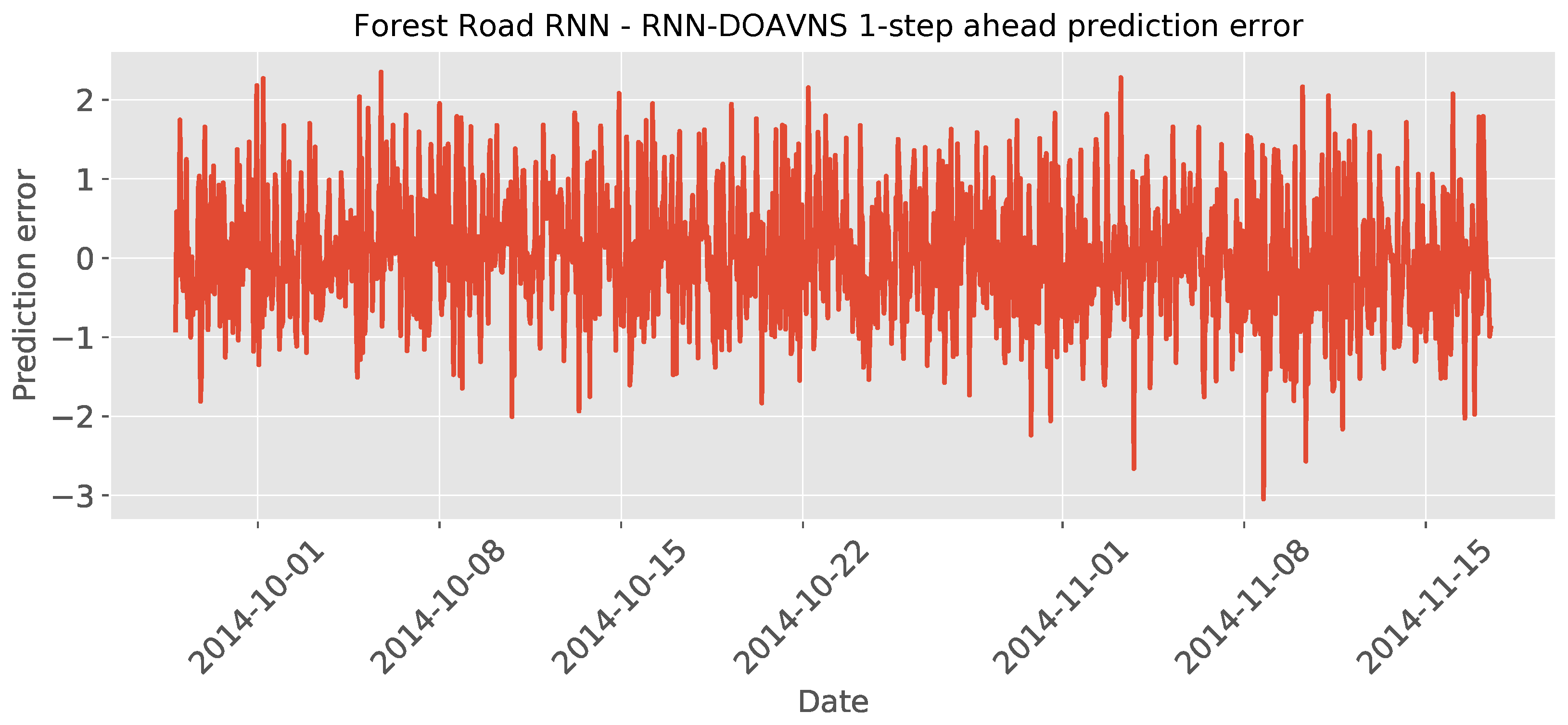
Figure 16.
Forest Road RNN simulations’ error over time.
Figure 16.
Forest Road RNN simulations’ error over time.
Figure 17.
Elm Crescent LSTM simulations’ objective function distribution diagrams.
Figure 17.
Elm Crescent LSTM simulations’ objective function distribution diagrams.
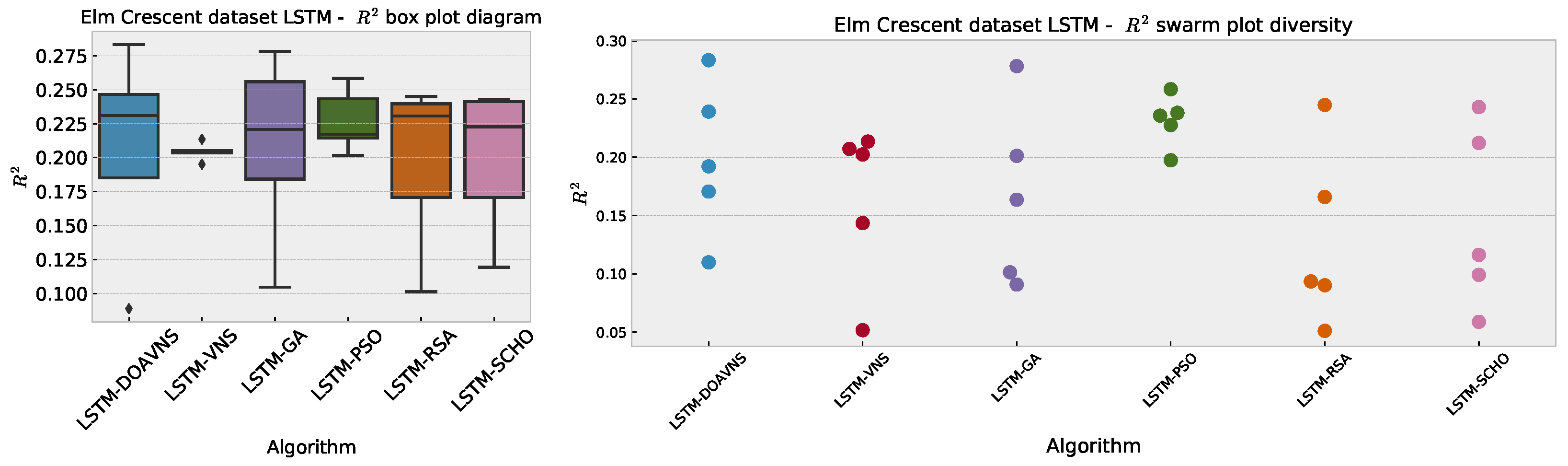
Figure 18.
Elm Crescent LSTM simulations’ indicator function distribution diagrams.
Figure 18.
Elm Crescent LSTM simulations’ indicator function distribution diagrams.
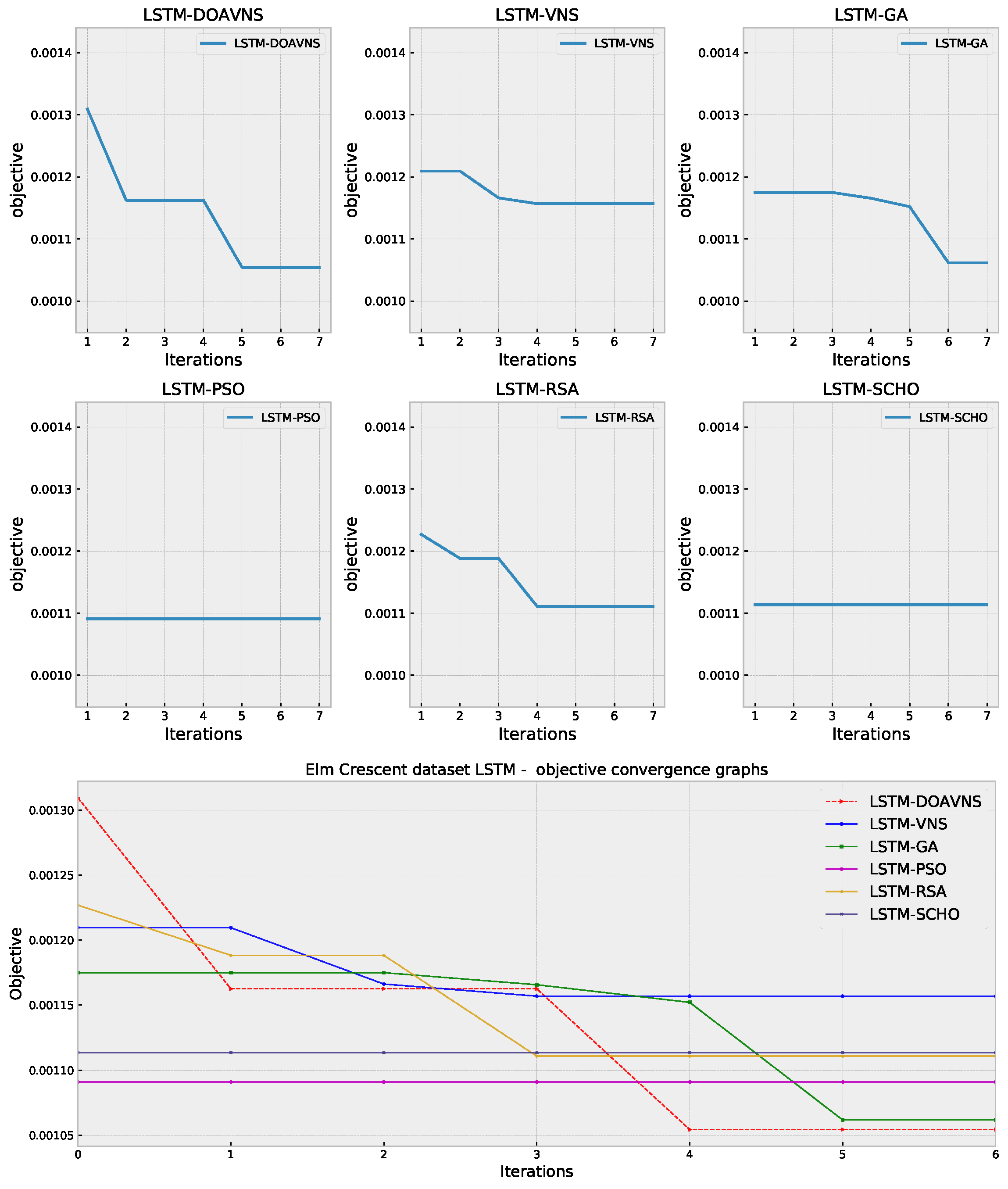
Figure 19.
Elm Crescent LSTM simulations’ objective function convergence diagrams.
Figure 19.
Elm Crescent LSTM simulations’ objective function convergence diagrams.
Figure 20.
Elm Crescent LSTM simulations’ indicator function convergence diagrams.
Figure 20.
Elm Crescent LSTM simulations’ indicator function convergence diagrams.
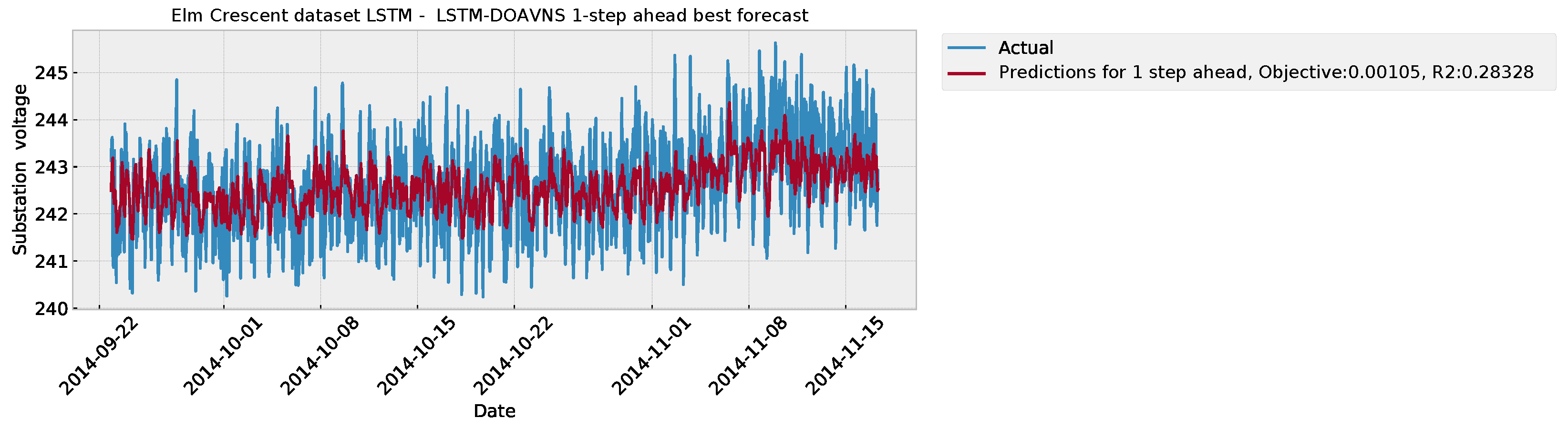
Figure 21.
Forecasts of best DOAVNS model from Elm Crescent LSTM simulations.
Figure 21.
Forecasts of best DOAVNS model from Elm Crescent LSTM simulations.
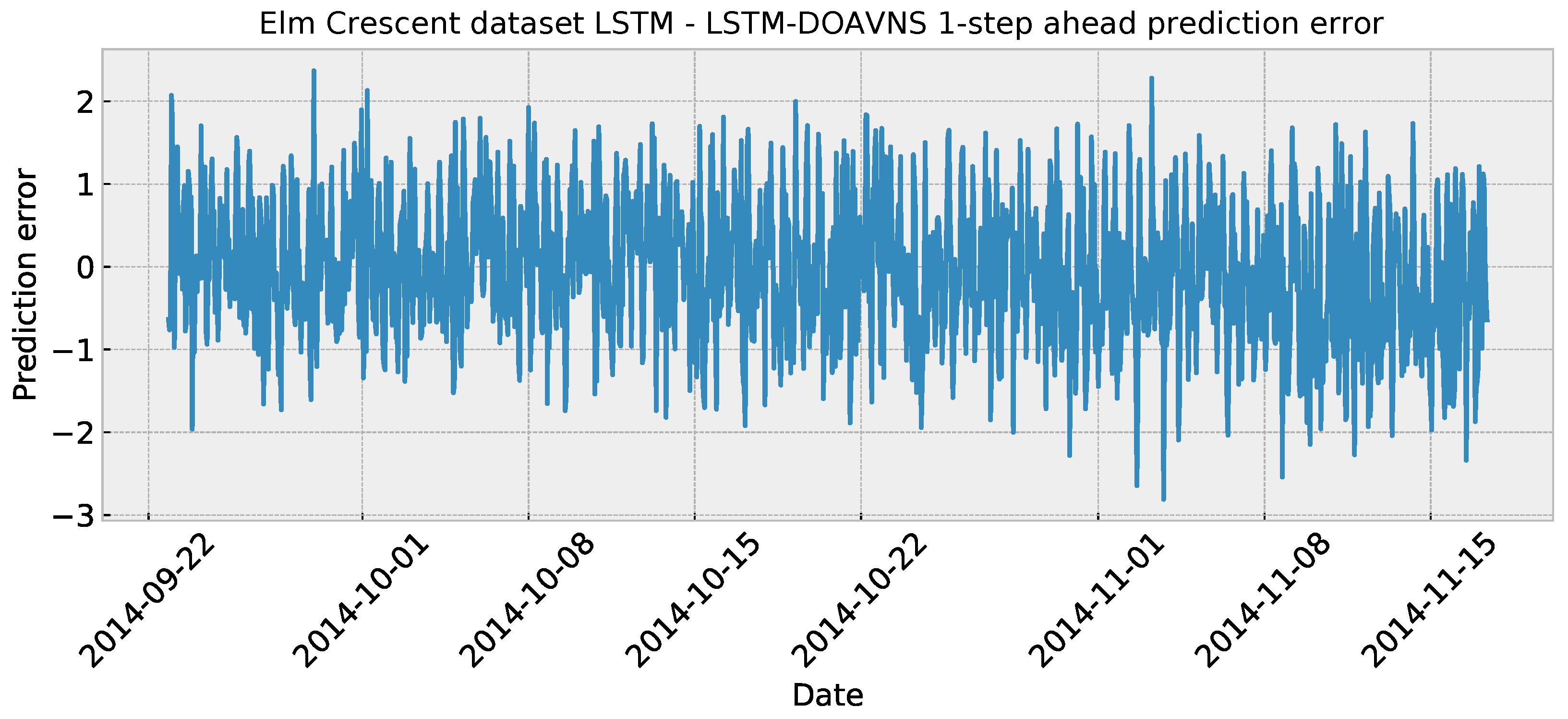
Figure 22.
Elm Crescent LSTM simulations’ error over time.
Figure 22.
Elm Crescent LSTM simulations’ error over time.
Figure 23.
Forest Road LSTM simulations’ objective function distribution diagrams.
Figure 23.
Forest Road LSTM simulations’ objective function distribution diagrams.
Figure 24.
Forest Road LSTM simulations’ indicator function distribution diagrams.
Figure 24.
Forest Road LSTM simulations’ indicator function distribution diagrams.
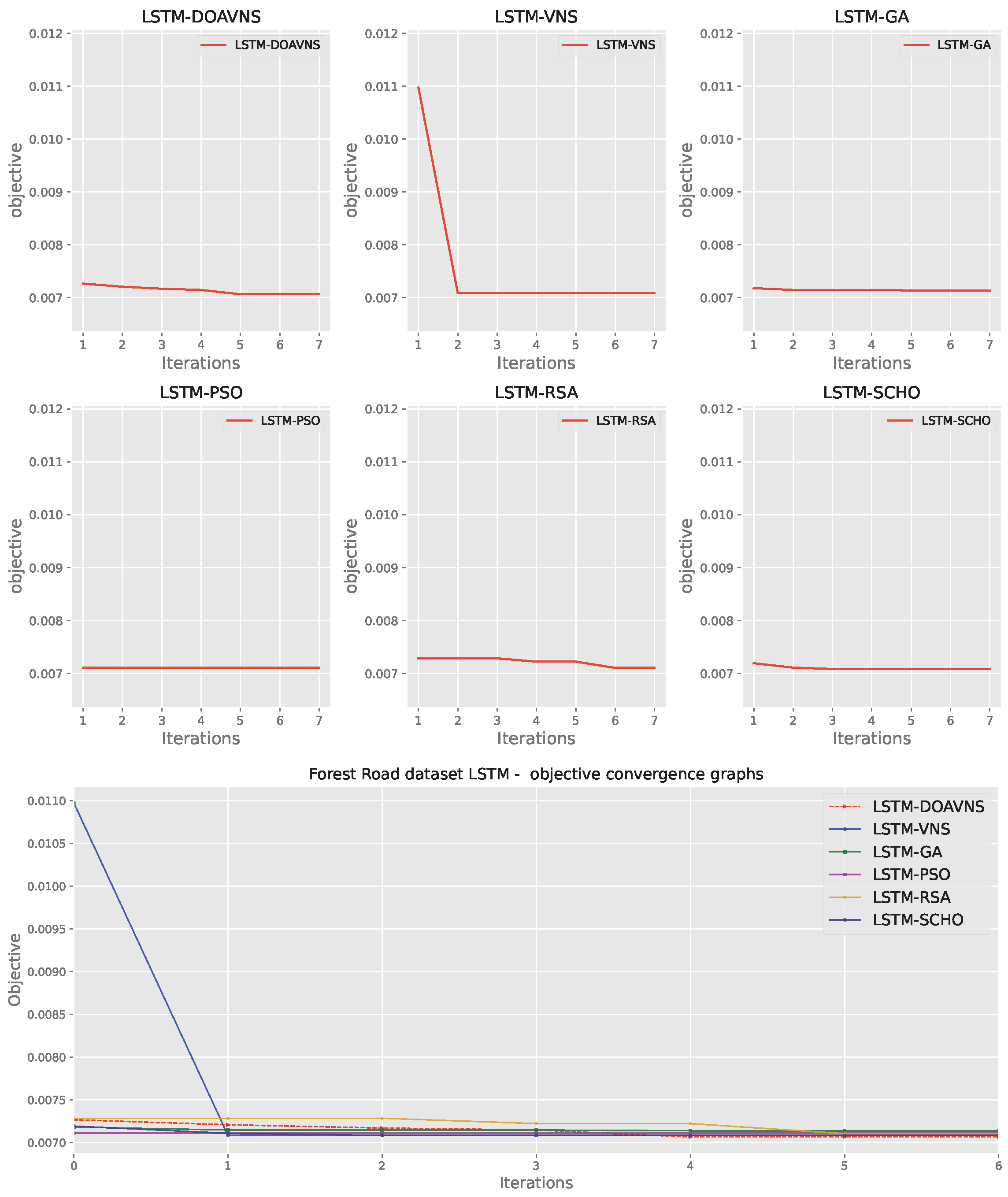
Figure 25.
Forest Road LSTM simulations’ objective function convergence diagrams.
Figure 25.
Forest Road LSTM simulations’ objective function convergence diagrams.
Figure 26.
Forest Road LSTM simulations’ indicator function convergence diagrams.
Figure 26.
Forest Road LSTM simulations’ indicator function convergence diagrams.
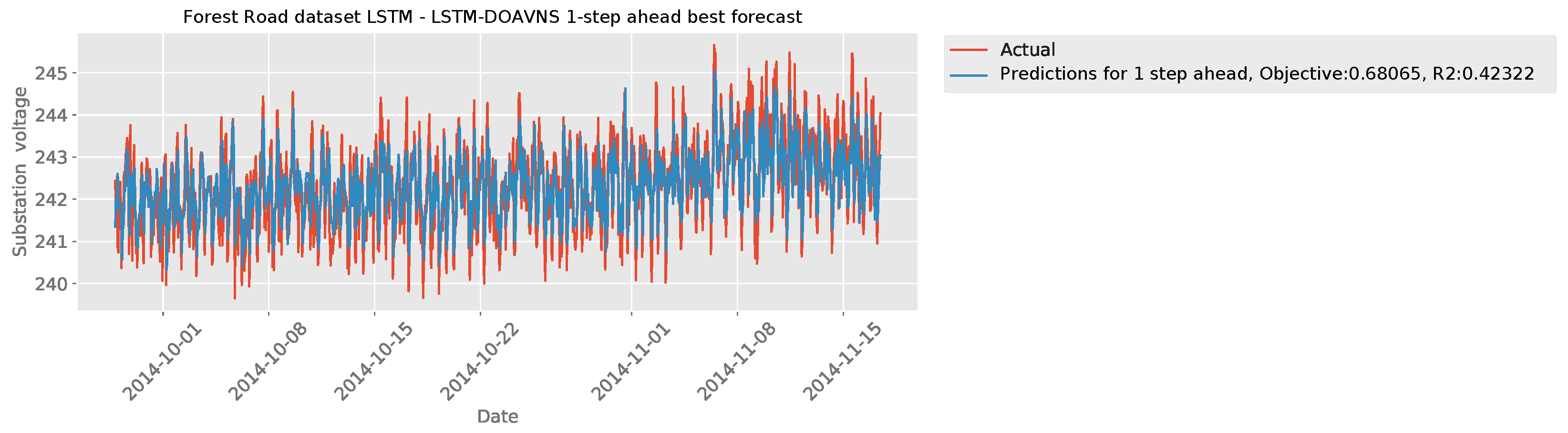
Figure 27.
Forecasts of best DOAVNS model from Forest Road LSTM simulations.
Figure 27.
Forecasts of best DOAVNS model from Forest Road LSTM simulations.
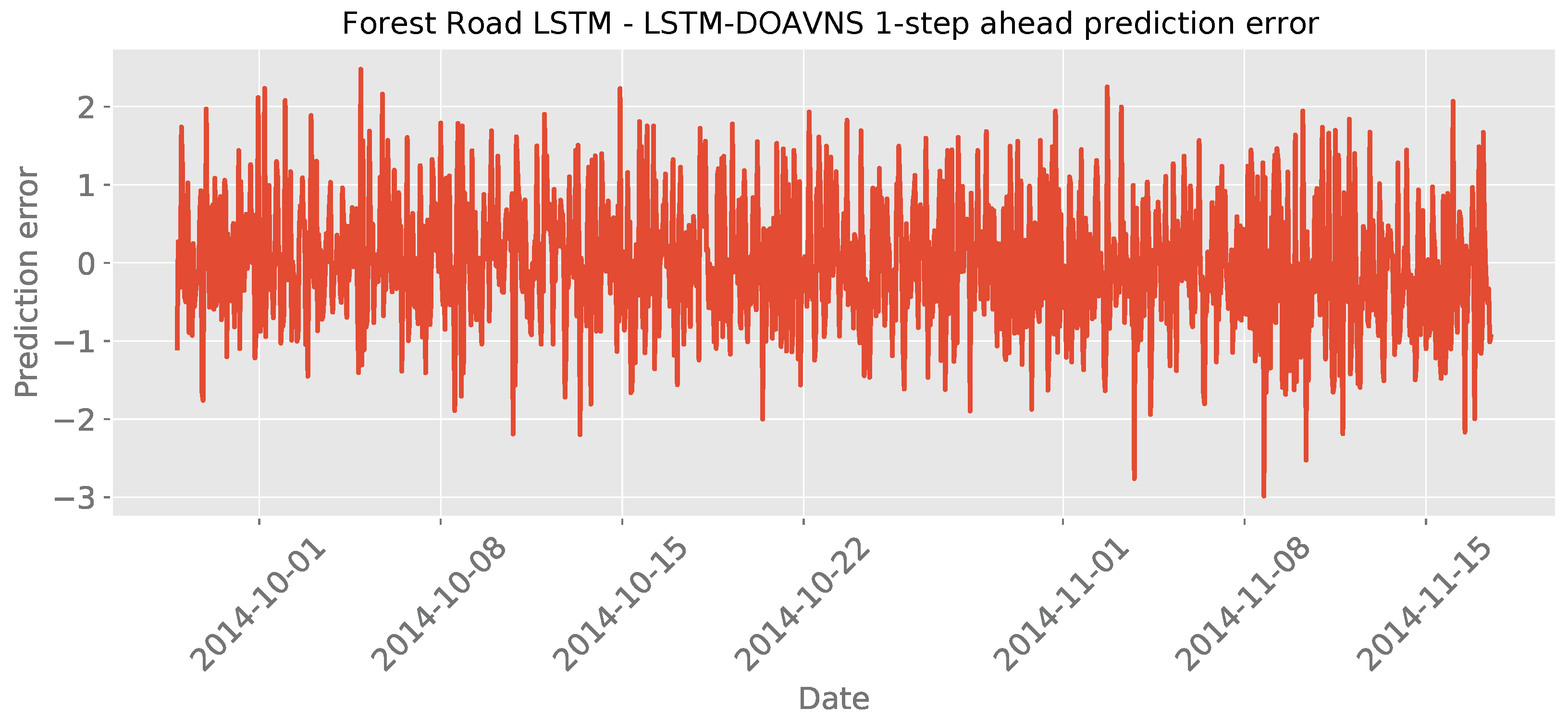
Figure 28.
Forest Road LSTM simulations’ error over time.
Figure 28.
Forest Road LSTM simulations’ error over time.
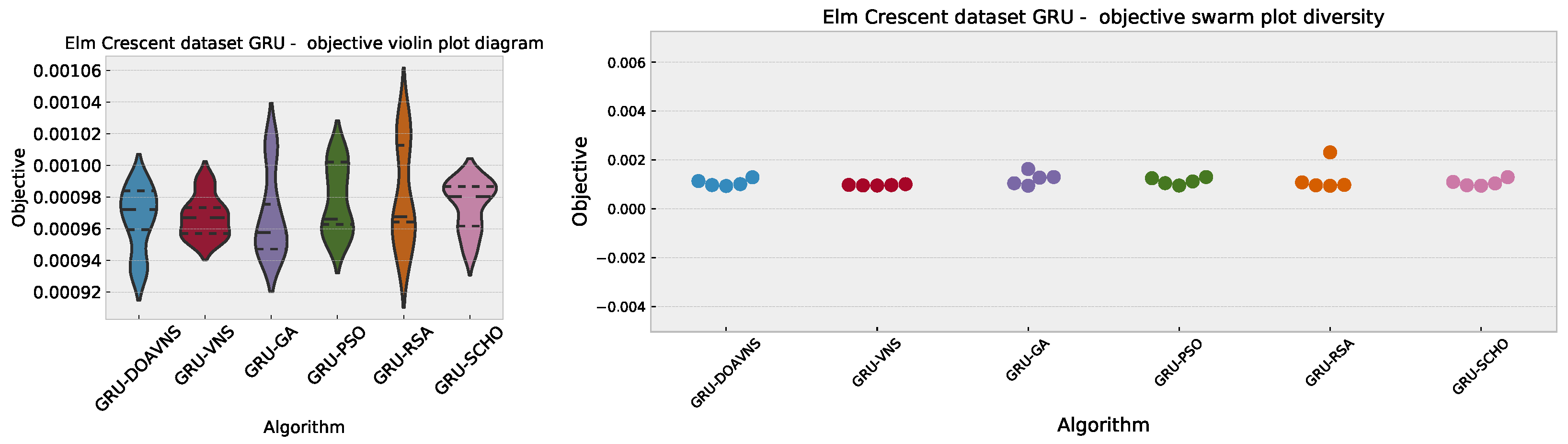
Figure 29.
Elm Crescent GRU simulations’ objective function distribution diagrams.
Figure 29.
Elm Crescent GRU simulations’ objective function distribution diagrams.
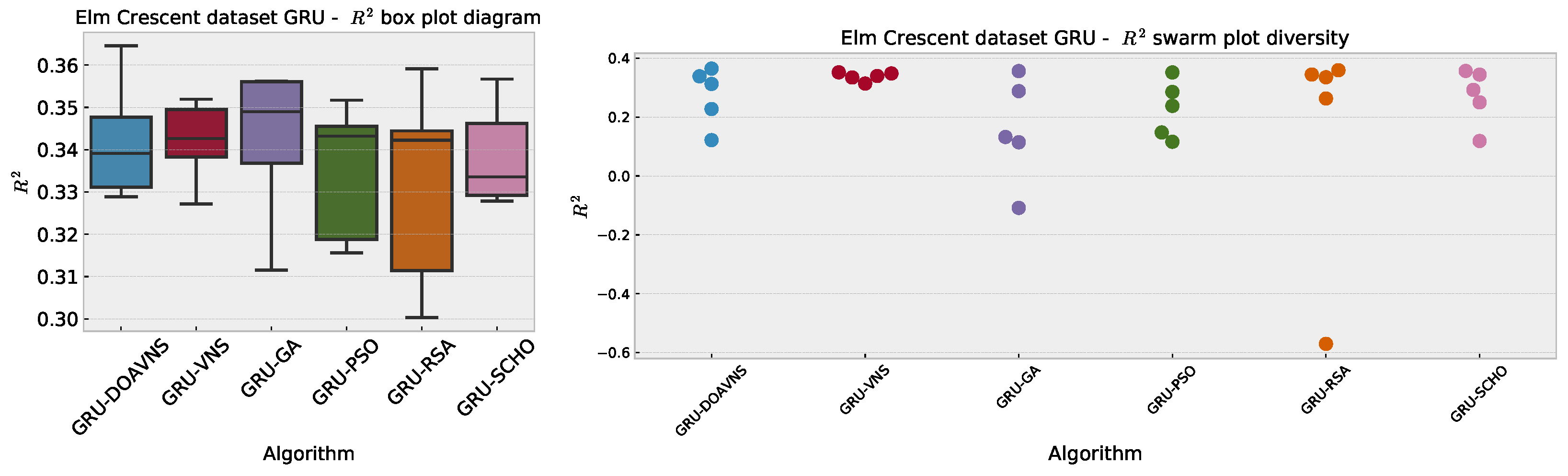
Figure 30.
Elm Crescent GRU simulations’ indicator function distribution diagrams.
Figure 30.
Elm Crescent GRU simulations’ indicator function distribution diagrams.
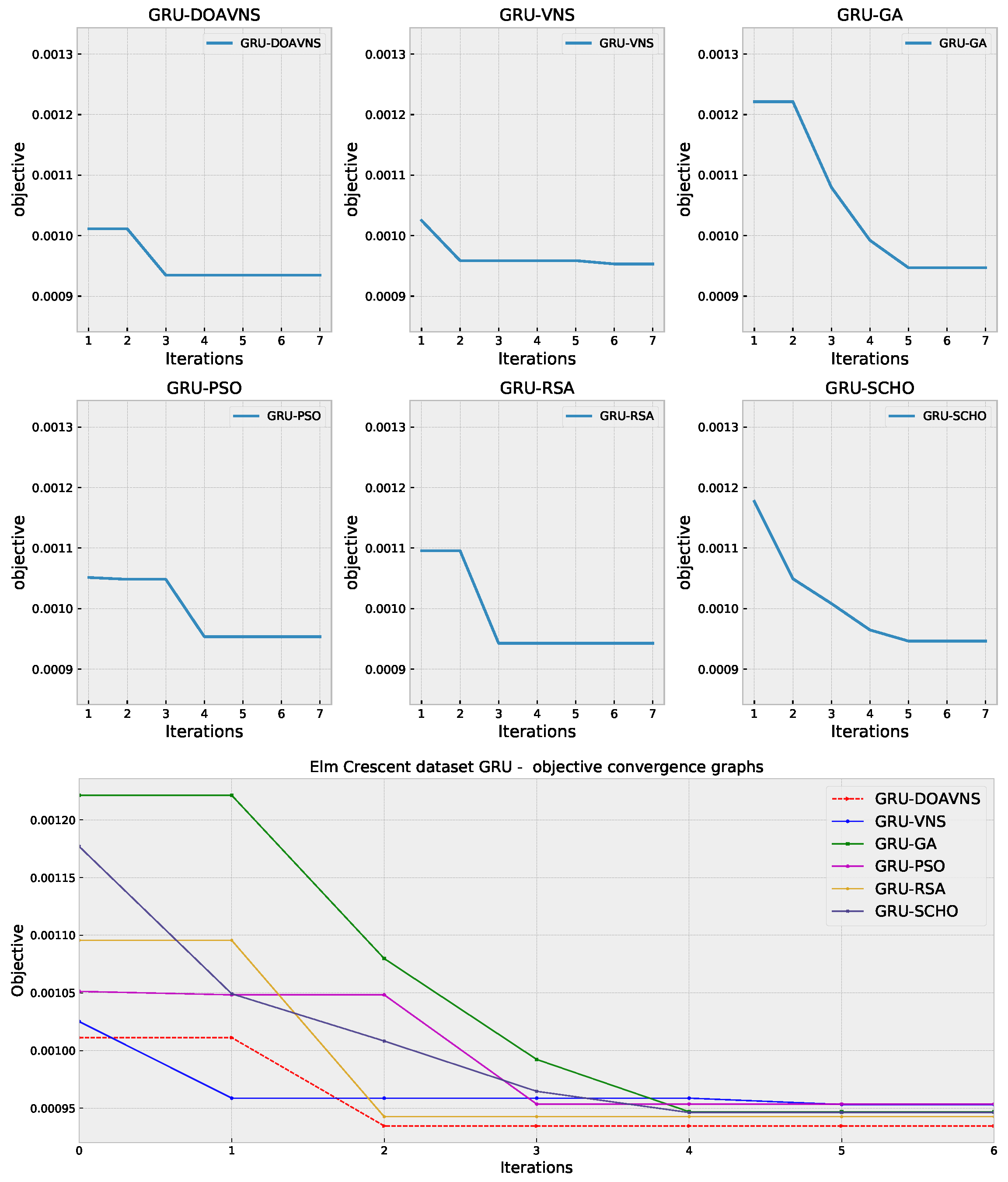
Figure 31.
Elm Crescent GRU simulations’ objective function convergence diagrams.
Figure 31.
Elm Crescent GRU simulations’ objective function convergence diagrams.
Figure 32.
Elm Crescent GRU simulations’ indicator function convergence diagrams.
Figure 32.
Elm Crescent GRU simulations’ indicator function convergence diagrams.
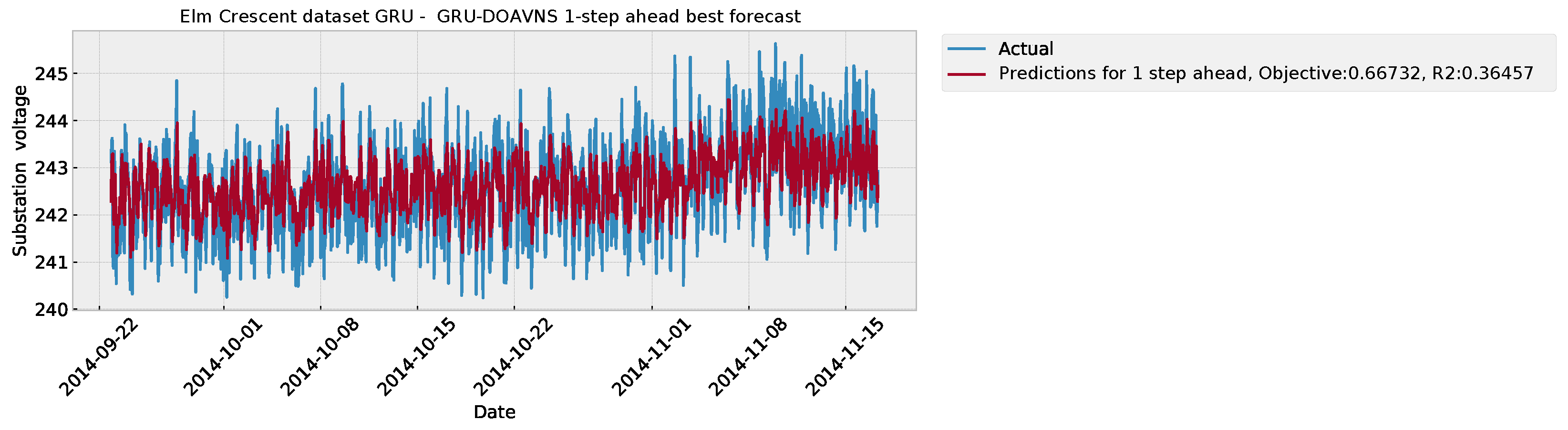
Figure 33.
Forecasts of best DOAVNS model from Elm Crescent GRU simulations.
Figure 33.
Forecasts of best DOAVNS model from Elm Crescent GRU simulations.
Figure 34.
Elm Crescent GRU simulations’ error over time.
Figure 34.
Elm Crescent GRU simulations’ error over time.
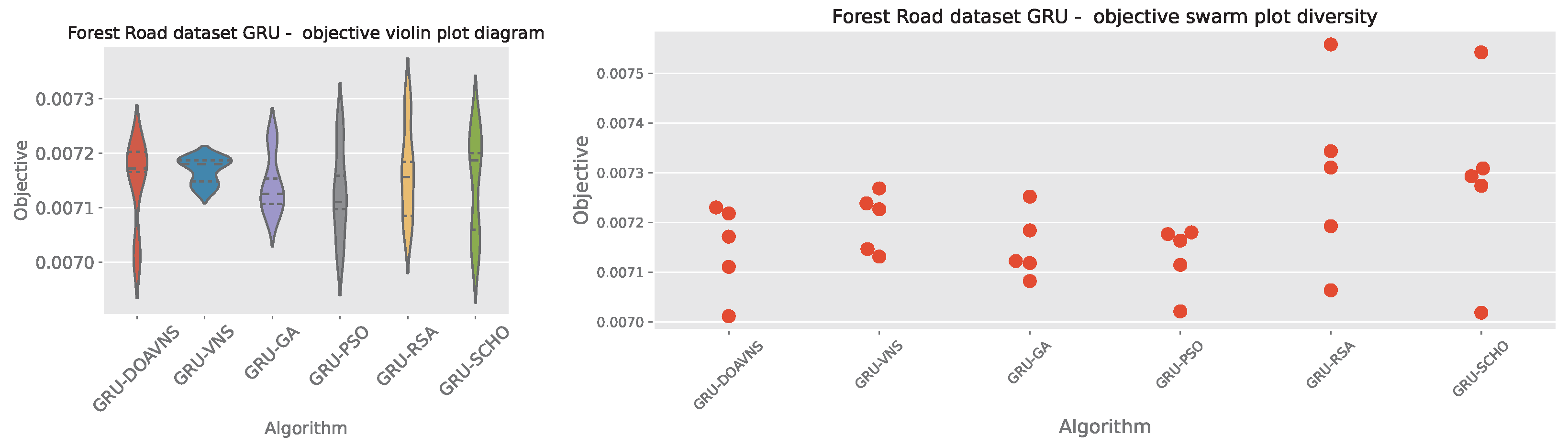
Figure 35.
Forest Road GRU simulations’ objective function distribution diagrams.
Figure 35.
Forest Road GRU simulations’ objective function distribution diagrams.
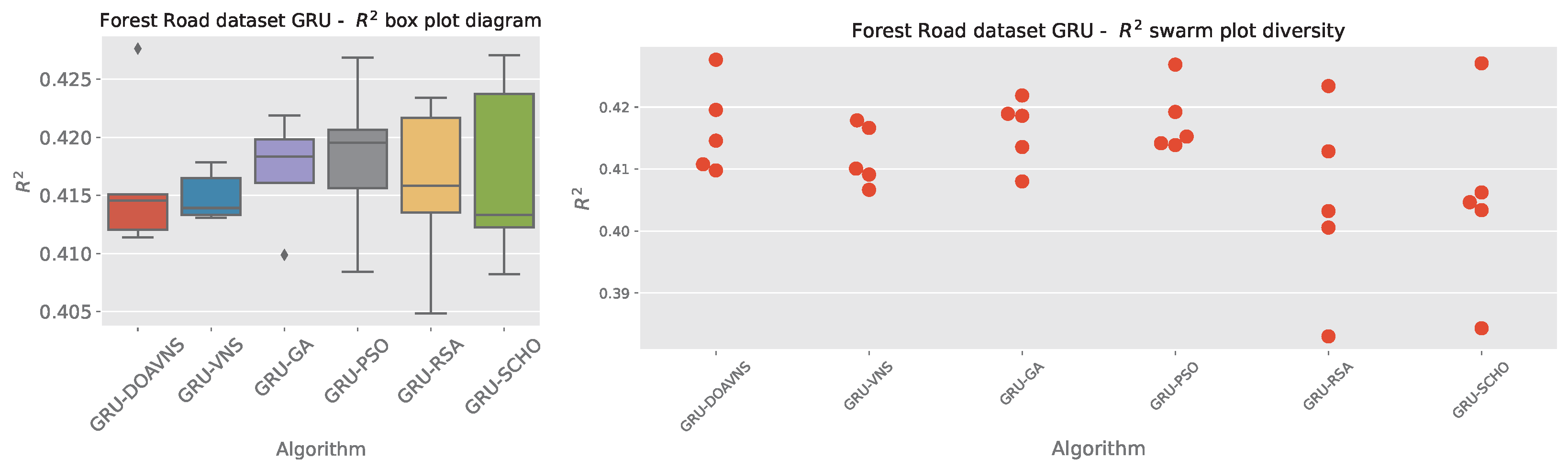
Figure 36.
Forest Road GRU simulations’ indicator function distribution diagrams.
Figure 36.
Forest Road GRU simulations’ indicator function distribution diagrams.
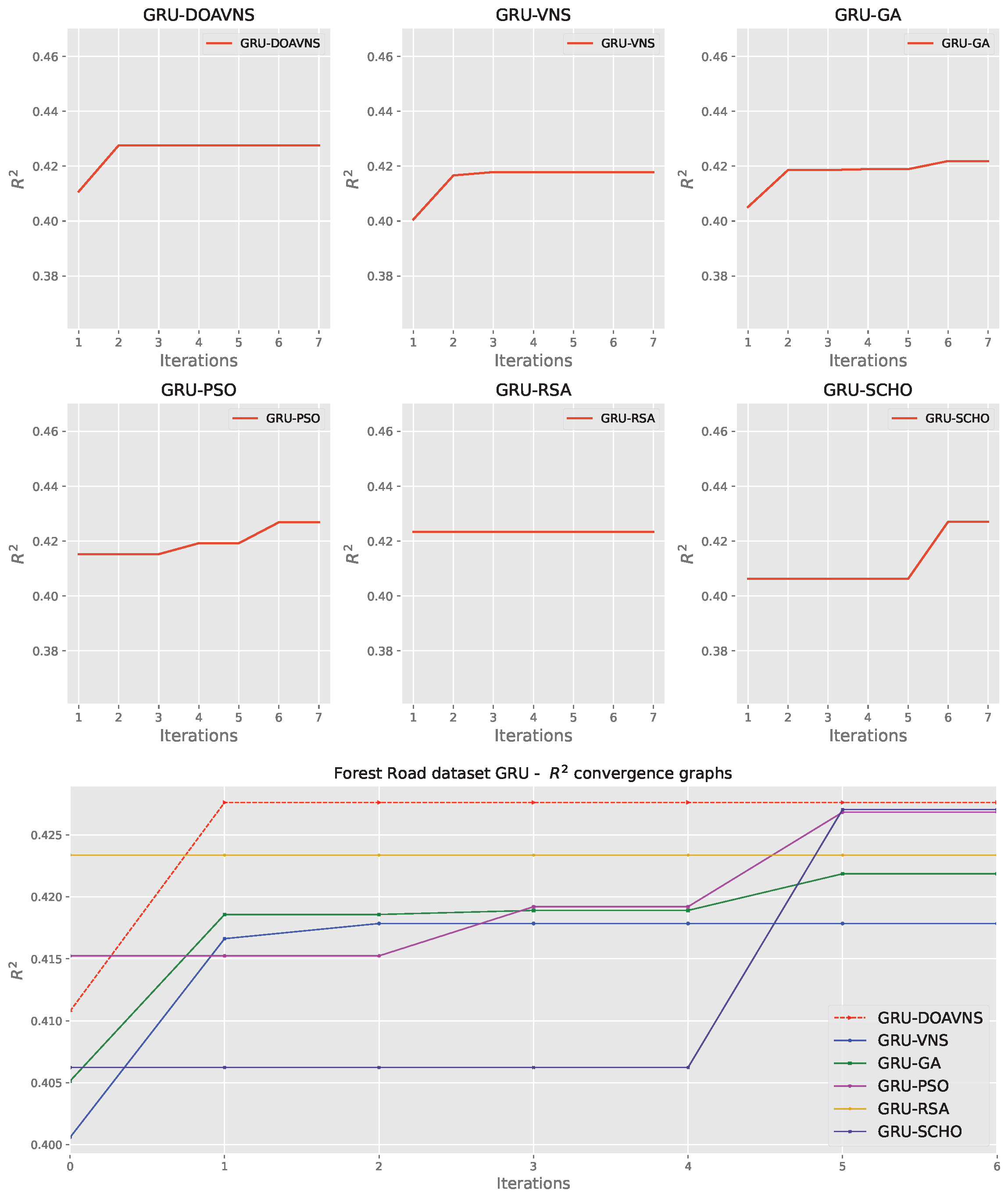
Figure 37.
Forest Road GRU simulations’ objective function convergence diagrams.
Figure 37.
Forest Road GRU simulations’ objective function convergence diagrams.
Figure 38.
Forest Road GRU simulations’ indicator function convergence diagrams.
Figure 38.
Forest Road GRU simulations’ indicator function convergence diagrams.
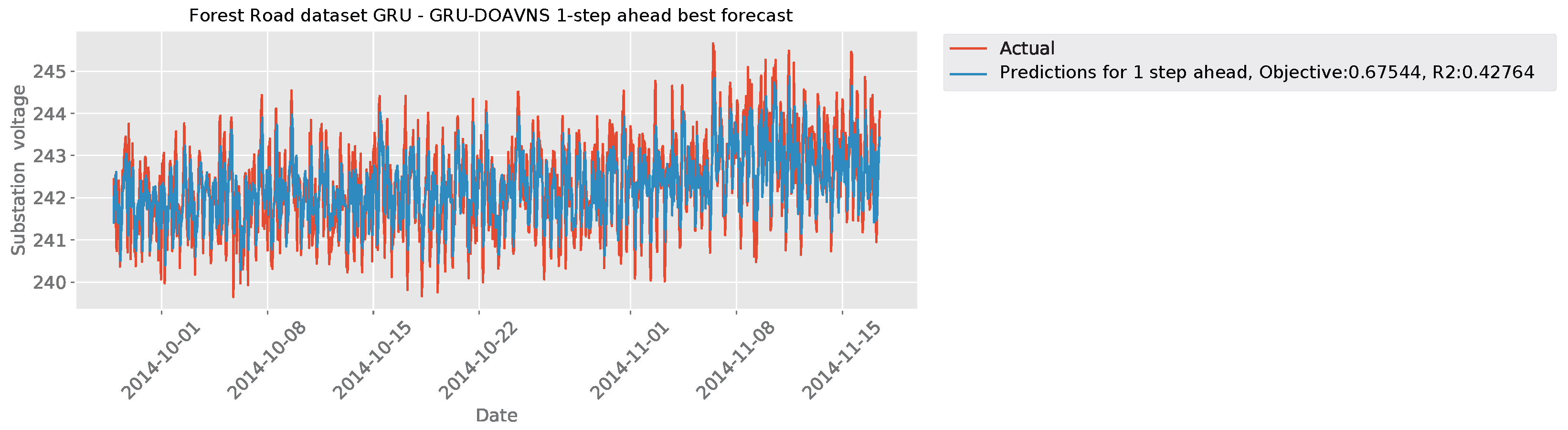
Figure 39.
Forecasts of best DOAVNS model from Forest Road GRU simulations.
Figure 39.
Forecasts of best DOAVNS model from Forest Road GRU simulations.
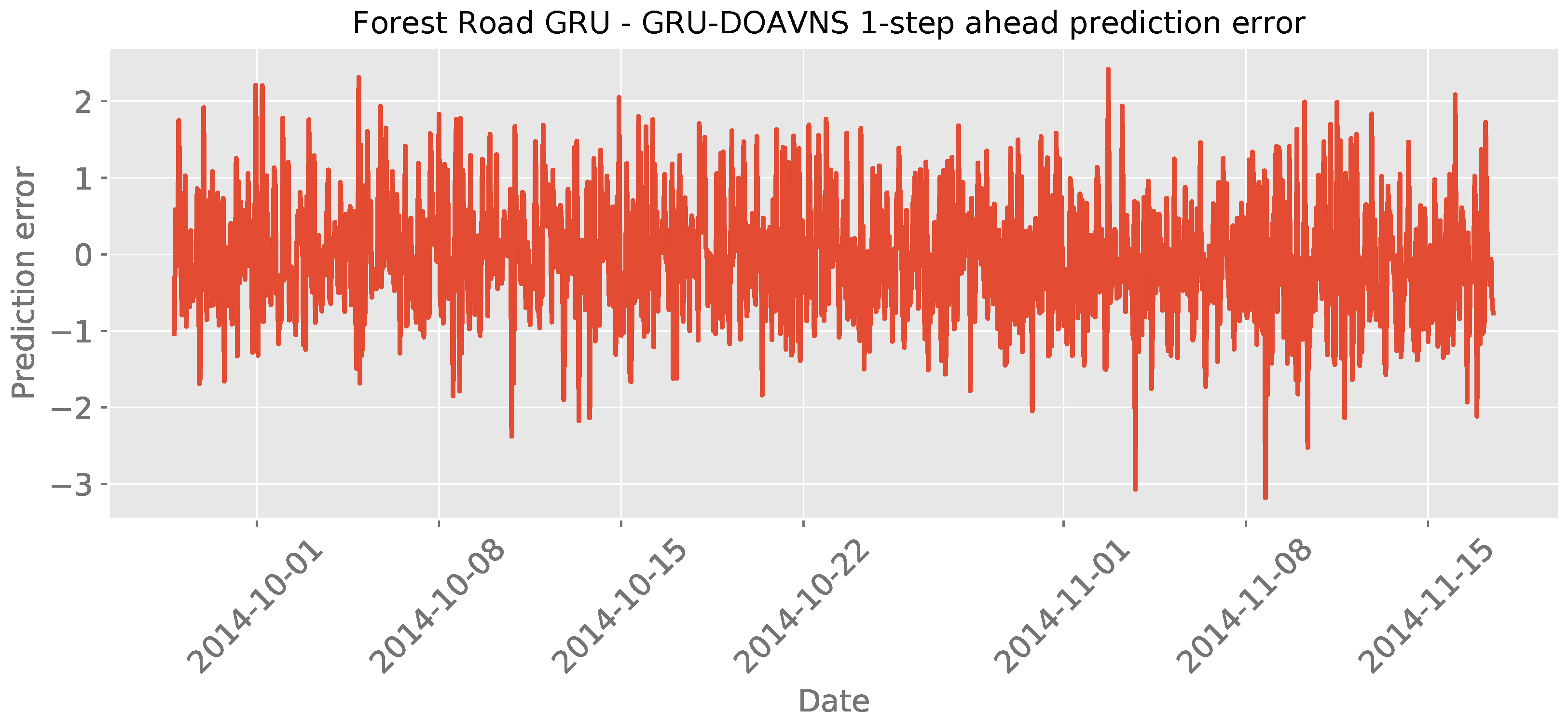
Figure 40.
Forest Road GRU simulations’ error over time.
Figure 40.
Forest Road GRU simulations’ error over time.
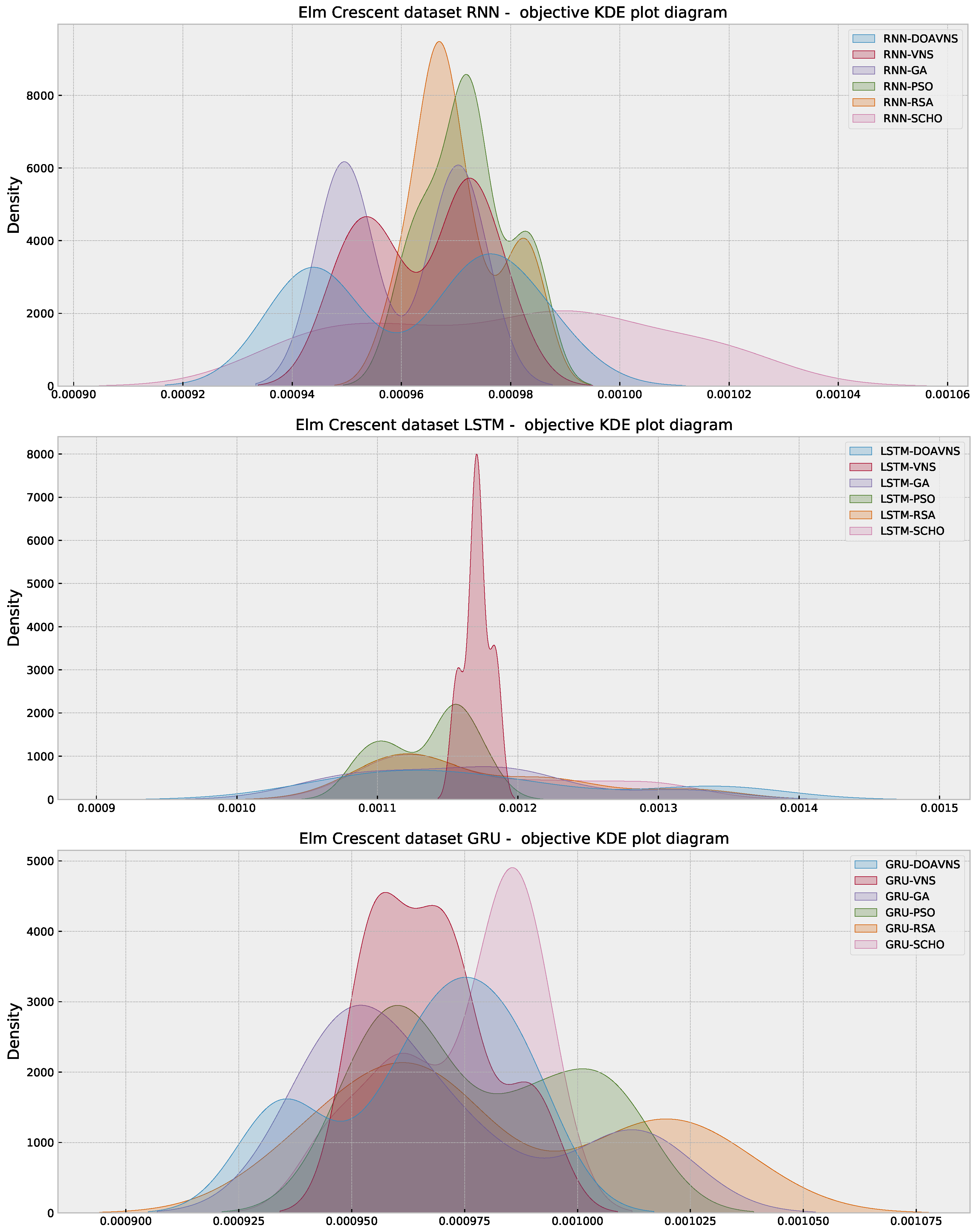
Figure 41.
Elm Crescent simulation KDE diagrams.
Figure 41.
Elm Crescent simulation KDE diagrams.
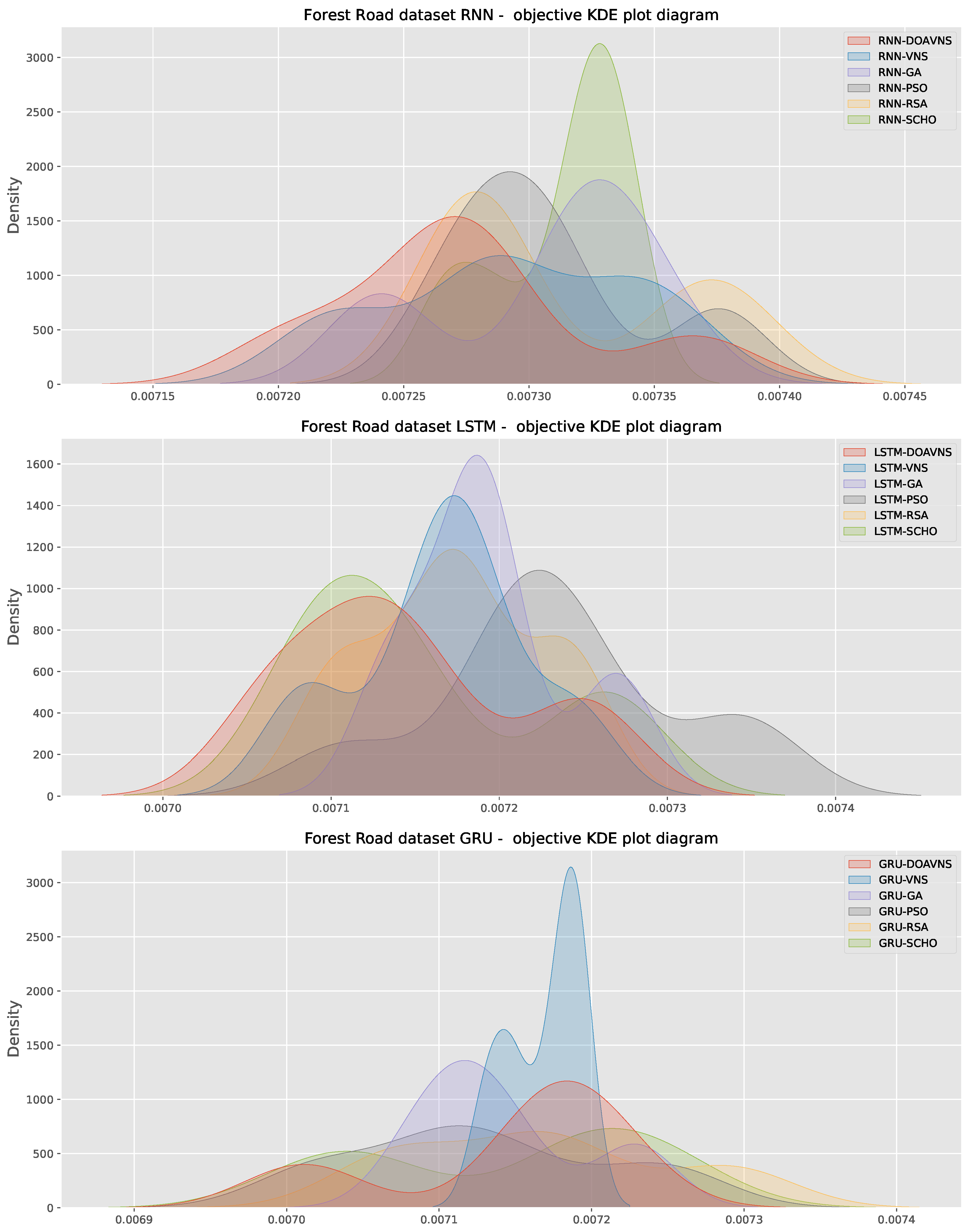
Figure 42.
Forest road simulation KDE diagrams.
Figure 42.
Forest road simulation KDE diagrams.
Table 1.
Parameter ranges for RNN, LSTM, and GRU networks.
Table 1.
Parameter ranges for RNN, LSTM, and GRU networks.
| Limit | Learning Rate | Dropout | Number of Epochs | Layers | Neurons in Layer |
|---|
| Lower | 0.0001 | 0.05 | 300 | 1 | 12 |
| Upper | 0.0100 | 0.20 | 600 | 4 | 36 |
Table 2.
Elm Crescent RNN simulations’ objective function outcomes.
Table 2.
Elm Crescent RNN simulations’ objective function outcomes.
| Method | Best | Worst | Mean | Median | Std | Var |
|---|
| RNN-DOAVNS | 0.000943 | 0.000986 | 0.000963 | 0.000973 | | |
| RNN-VNS | 0.000950 | 0.000979 | 0.000964 | 0.000971 | | |
| RNN-GA | 0.000949 | 0.000971 | 0.000960 | 0.000959 | | |
| RNN-PSO | 0.000961 | 0.000983 | 0.000972 | 0.000972 | | |
| RNN-RSA | 0.000960 | 0.000983 | 0.000970 | 0.000967 | | |
| RNN-SCHO | 0.000944 | 0.001017 | 0.000979 | 0.000987 | | |
Table 3.
Elm Crescent RNN simulations’ detailed metrics for the best-performing optimized models.
Table 3.
Elm Crescent RNN simulations’ detailed metrics for the best-performing optimized models.
| Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| RNN-DOAVNS | 0.358764 | 0.024683 | 0.000943 | 0.030712 | 0.732794 |
| RNN-VNS | 0.354170 | 0.024840 | 0.000950 | 0.030822 | 0.715560 |
| RNN-GA | 0.354504 | 0.024788 | 0.000949 | 0.030814 | 0.711936 |
| RNN-PSO | 0.346816 | 0.024590 | 0.000961 | 0.030997 | 0.742532 |
| RNN-RSA | 0.347640 | 0.024842 | 0.000960 | 0.030977 | 0.734755 |
| RNN-SCHO | 0.358032 | 0.024725 | 0.000944 | 0.030729 | 0.728545 |
Table 4.
Best-performing RNN model parameter selections for Elm Crescent simulations.
Table 4.
Best-performing RNN model parameter selections for Elm Crescent simulations.
| | Learning | | Training | RNN | L1 | L2 | L3 | L4 |
|---|
|
Method
|
Rate
|
Dropout
|
Epochs
|
Layers
|
Neurons
|
Neurons
|
Neurons
|
Neurons
|
|---|
| RNN-DOAVNS | | 0.186 | 427 | 1 | 36 | N/a | N/a | N/a |
| RNN-VNS | | 0.139 | 551 | 1 | 23 | N/a | N/a | N/a |
| RNN-GA | | 0.05 | 586 | 1 | 18 | N/a | N/a | N/a |
| RNN-PSO | | 0.2 | 600 | 1 | 36 | N/a | N/a | N/a |
| RNN-RSA | | 0.113 | 600 | 1 | 20 | N/a | N/a | N/a |
| RNN-SCHO | | 0.2 | 536 | 1 | 36 | N/a | N/a | N/a |
Table 5.
Forest Road RNN simulations’ objective function outcomes.
Table 5.
Forest Road RNN simulations’ objective function outcomes.
| Method | Best | Worst | Mean | Median | Std | Var |
|---|
| RNN-DOAVNS | 0.007205 | 0.007366 | 0.007275 | 0.007275 | | |
| RNN-VNS | 0.007223 | 0.007357 | 0.007293 | 0.007290 | | |
| RNN-GA | 0.007241 | 0.007354 | 0.007307 | 0.007322 | | |
| RNN-PSO | 0.007265 | 0.007376 | 0.007308 | 0.007296 | | |
| RNN-RSA | 0.007276 | 0.007385 | 0.007314 | 0.007283 | | |
| RNN-SCHO | 0.007267 | 0.007337 | 0.007313 | 0.007320 | | |
Table 6.
Forest Road RNN simulations’ detailed metrics for the best-performing optimized models.
Table 6.
Forest Road RNN simulations’ detailed metrics for the best-performing optimized models.
| Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| RNN-DOAVNS | 0.411854 | 0.067344 | 0.007205 | 0.084881 | 0.758396 |
| RNN-VNS | 0.410324 | 0.067163 | 0.007223 | 0.084991 | 0.757463 |
| RNN-GA | 0.408894 | 0.067151 | 0.007241 | 0.085094 | 0.760513 |
| RNN-PSO | 0.406952 | 0.068032 | 0.007265 | 0.085234 | 0.750386 |
| RNN-RSA | 0.406050 | 0.067403 | 0.007276 | 0.085299 | 0.756161 |
| RNN-SCHO | 0.406745 | 0.067264 | 0.007267 | 0.085249 | 0.759018 |
Table 7.
Best-performing RNN model parameter selections for Forest Road simulations.
Table 7.
Best-performing RNN model parameter selections for Forest Road simulations.
| | Learning | | Training | RNN | L1 | L2 | L3 | L4 |
|---|
|
Method
|
Rate
|
Dropout
| Epochs |
Layers
|
Neurons
|
Neurons
|
Neurons
|
Neurons
|
|---|
| RNN-DOAVNS | 0.1 | 0.103 | 521 | 3 | 22 | 32 | 36 | N/a |
| RNN-VNS | 0.01 | 0.052 | 555 | 1 | 21 | N/a | N/a | N/a |
| RNN-GA | | 0.186 | 541 | 3 | 36 | 34 | 31 | N/a |
| RNN-PSO | | 0.083 | 349 | 3 | 16 | 24 | 27 | N/a |
| RNN-RSA | | 0.094 | 308 | 1 | 36 | N/a | N/a | N/a |
| RNN-SCHO | | 0.133 | 535 | 4 | 18 | 18 | 34 | 14 |
Table 8.
Elm Crescent LSTM simulations’ objective function outcomes.
Table 8.
Elm Crescent LSTM simulations’ objective function outcomes.
| Method | Best | Worst | Mean | Median | Std | Var |
|---|
| LSTM-DOAVNS | 0.001054 | 0.001340 | 0.001181 | 0.001131 | | |
| LSTM-VNS | 0.001157 | 0.001184 | 0.001171 | 0.001171 | | |
| LSTM-GA | 0.001062 | 0.001317 | 0.001165 | 0.001146 | | |
| LSTM-PSO | 0.001091 | 0.001174 | 0.001136 | 0.001151 | | |
| LSTM-RSA | 0.001111 | 0.001322 | 0.001174 | 0.001132 | | |
| LSTM-SCHO | 0.001113 | 0.001295 | 0.001177 | 0.001143 | | |
Table 9.
Elm Crescent LSTM simulations’ detailed metrics for the best-performing optimized models.
Table 9.
Elm Crescent LSTM simulations’ detailed metrics for the best-performing optimized models.
| Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| LSTM-DOAVNS | 0.283279 | 0.026561 | 0.001054 | 0.032469 | 0.627262 |
| LSTM-VNS | 0.213508 | 0.027945 | 0.001157 | 0.034013 | 0.588553 |
| LSTM-GA | 0.278216 | 0.026651 | 0.001062 | 0.032584 | 0.653422 |
| LSTM-PSO | 0.258380 | 0.027084 | 0.001091 | 0.033028 | 0.644435 |
| LSTM-RSA | 0.244873 | 0.027386 | 0.001111 | 0.033328 | 0.599909 |
| LSTM-SCHO | 0.243068 | 0.027403 | 0.001113 | 0.033368 | 0.612395 |
Table 10.
Best-performing LSTM model parameter selections for Elm Crescent simulations.
Table 10.
Best-performing LSTM model parameter selections for Elm Crescent simulations.
| | Learning | | Training | LSTM | L1 | L2 | L3 | L4 |
|---|
|
Method
|
Rate
|
Dropout
|
Epochs
|
Layers
|
Neurons
|
Neurons
|
Neurons
|
Neurons
|
|---|
| LSTM-DOAVNS | | 0.05 | 600 | 1 | 36 | N/a | N/a | N/a |
| LSTM-VNS | | 0.081 | 445 | 1 | 31 | N/a | N/a | N/a |
| LSTM-GA | | 0.136 | 600 | 1 | 25 | N/a | N/a | N/a |
| LSTM-PSO | | 0.2 | 600 | 1 | 16 | N/a | N/a | N/a |
| LSTM-RSA | | 0.058 | 600 | 1 | 33 | N/a | N/a | N/a |
| LSTM-SCHO | | 0.097 | 598 | 1 | 35 | N/a | N/a | N/a |
Table 11.
Forest Road LSTM simulations’ objective function outcomes.
Table 11.
Forest Road LSTM simulations’ objective function outcomes.
| Method | Best | Worst | Mean | Median | Std | Var |
|---|
| LSTM-DOAVNS | 0.007066 | 0.007250 | 0.007145 | 0.007127 | | |
| LSTM-VNS | 0.007085 | 0.007243 | 0.007166 | 0.007171 | | |
| LSTM-GA | 0.007138 | 0.007270 | 0.007193 | 0.007187 | | |
| LSTM-PSO | 0.007110 | 0.007344 | 0.007234 | 0.007215 | | |
| LSTM-RSA | 0.007104 | 0.007241 | 0.007174 | 0.007178 | | |
| LSTM-SCHO | 0.007084 | 0.007263 | 0.007155 | 0.007134 | | |
Table 12.
Forest Road LSTM simulations’ detailed metrics for the best-performing optimized models.
Table 12.
Forest Road LSTM simulations’ detailed metrics for the best-performing optimized models.
| Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| LSTM-DOAVNS | 0.423220 | 0.066313 | 0.007066 | 0.084057 | 0.777800 |
| LSTM-VNS | 0.421609 | 0.066415 | 0.007085 | 0.084174 | 0.779413 |
| LSTM-GA | 0.417343 | 0.066647 | 0.007138 | 0.084484 | 0.770246 |
| LSTM-PSO | 0.419611 | 0.066517 | 0.007110 | 0.084319 | 0.772205 |
| LSTM-RSA | 0.420049 | 0.066523 | 0.007104 | 0.084287 | 0.768804 |
| LSTM-SCHO | 0.421743 | 0.066467 | 0.007084 | 0.084164 | 0.786252 |
Table 13.
Best-performing LSTM model parameter selections for Forest Road simulations.
Table 13.
Best-performing LSTM model parameter selections for Forest Road simulations.
| | Learning | | Training | LSTM | L1 | L2 | L3 | L4 |
|---|
|
Method
|
Rate
|
Dropout
|
Epochs
|
Layers
|
Neurons
|
Neurons
|
Neurons
|
Neurons
|
|---|
| LSTM-DOAVNS | | 0.062 | 599 | 3 | 21 | 27 | 26 | N/a |
| LSTM-VNS | | 0.2 | 600 | 3 | 36 | 12 | 30 | N/a |
| LSTM-GA | | 0.05 | 600 | 2 | 35 | 13 | N/a | N/a |
| LSTM-PSO | | 0.094 | 442 | 2 | 36 | 19 | N/a | N/a |
| LSTM-RSA | | 0.198 | 509 | 2 | 20 | 14 | N/a | N/a |
| LSTM-SCHO | | 0.135 | 600 | 2 | 36 | 29 | N/a | N/a |
Table 14.
Elm Crescent GRU simulations’ objective function outcomes.
Table 14.
Elm Crescent GRU simulations’ objective function outcomes.
| Method | Best | Worst | Mean | Median | Std | Var |
|---|
| GRU-DOAVNS | 0.000935 | 0.000987 | 0.000966 | 0.000972 | | |
| GRU-VNS | 0.000953 | 0.000990 | 0.000967 | 0.000967 | | |
| GRU-GA | 0.000947 | 0.001013 | 0.000969 | 0.000958 | | |
| GRU-PSO | 0.000954 | 0.001007 | 0.000978 | 0.000966 | | |
| GRU-RSA | 0.000943 | 0.001029 | 0.000981 | 0.000968 | | |
| GRU-SCHO | 0.000946 | 0.000989 | 0.000975 | 0.000980 | | |
Table 15.
Elm Crescent GRU simulations’ detailed metrics for the best-performing optimized models.
Table 15.
Elm Crescent GRU simulations’ detailed metrics for the best-performing optimized models.
| Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| GRU-DOAVNS | 0.364567 | 0.024732 | 0.000935 | 0.030573 | 0.714853 |
| GRU-VNS | 0.351947 | 0.024926 | 0.000953 | 0.030875 | 0.699482 |
| GRU-GA | 0.356229 | 0.024853 | 0.000947 | 0.030772 | 0.698655 |
| GRU-PSO | 0.351697 | 0.024939 | 0.000954 | 0.030881 | 0.709874 |
| GRU-RSA | 0.359132 | 0.024496 | 0.000943 | 0.030703 | 0.724398 |
| GRU-SCHO | 0.356679 | 0.024926 | 0.000946 | 0.030762 | 0.695907 |
Table 16.
Best-performing GRU model parameter selections for Elm Crescent simulations.
Table 16.
Best-performing GRU model parameter selections for Elm Crescent simulations.
| | Learning | | Training | GRU | L1 | L2 | L3 | L4 |
|---|
|
Method
|
Rate
|
Dropout
|
Epochs
|
Layers
|
Neurons
|
Neurons
|
Neurons
|
Neurons
|
|---|
| GRU-DOAVNS | | 0.175 | 600 | 1 | 36 | N/a | N/a | N/a |
| GRU-VNS | | 0.0699 | 600 | 1 | 19 | N/a | N/a | N/a |
| GRU-GA | | 0.0747 | 600 | 1 | 31 | N/a | N/a | N/a |
| GRU-PSO | | 0.05 | 600 | 2 | 32 | 27 | N/a | N/a |
| GRU-RSA | | 0.15 | 600 | 3 | 19 | 23 | 35 | N/a |
| GRU-SCHO | | 0.125 | 596 | 1 | 13 | N/a | N/a | N/a |
Table 17.
Forest Road GRU simulations’ objective function outcomes.
Table 17.
Forest Road GRU simulations’ objective function outcomes.
| Method | Best | Worst | Mean | Median | Std | Var |
|---|
| GRU-DOAVNS | 0.007011 | 0.007211 | 0.007145 | 0.007171 | | |
| GRU-VNS | 0.007131 | 0.007190 | 0.007169 | 0.007179 | | |
| GRU-GA | 0.007082 | 0.007229 | 0.007143 | 0.007125 | | |
| GRU-PSO | 0.007021 | 0.007247 | 0.007128 | 0.007110 | | |
| GRU-RSA | 0.007063 | 0.007291 | 0.007167 | 0.007156 | | |
| GRU-SCHO | 0.007018 | 0.007249 | 0.007145 | 0.007187 | | |
Table 18.
Forest Road GRU simulations’ detailed metrics for the best-performing optimized models.
Table 18.
Forest Road GRU simulations’ detailed metrics for the best-performing optimized models.
| Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| GRU-DOAVNS | 0.427637 | 0.066774 | 0.007011 | 0.083734 | 0.784870 |
| GRU-VNS | 0.417857 | 0.066844 | 0.007131 | 0.084447 | 0.770818 |
| GRU-GA | 0.421873 | 0.066330 | 0.007082 | 0.084155 | 0.772736 |
| GRU-PSO | 0.426849 | 0.066375 | 0.007021 | 0.083792 | 0.774807 |
| GRU-RSA | 0.423387 | 0.066148 | 0.007063 | 0.084044 | 0.789407 |
| GRU-SCHO | 0.427066 | 0.066585 | 0.007018 | 0.083776 | 0.783809 |
Table 19.
Best-performing GRU model parameter selections for Forest Road simulations.
Table 19.
Best-performing GRU model parameter selections for Forest Road simulations.
| | Learning | | Training | LSTM | L1 | L2 | L3 | L4 |
|---|
|
Method
|
Rate
|
Dropout
|
Epochs
|
Layers
|
Neurons
|
Neurons
|
Neurons
|
Neurons
|
|---|
| GRU-DOAVNS | | 0.2 | 600 | 4 | 12 | 12 | 36 | 12 |
| GRU-VNS | | 0.0594 | 600 | 4 | 36 | 13 | 12 | 12 |
| GRU-GA | | 0.116 | 600 | 4 | 12 | 29 | 35 | 15 |
| GRU-PSO | | 0.128 | 600 | 3 | 30 | 18 | 17 | N/a |
| GRU-RSA | | 0.160 | 564 | 4 | 33 | 32 | 23 | 14 |
| GRU-SCHO | | 0.0838 | 600 | 2 | 23 | 12 | N/a | N/a |
Table 20.
A comparison between the best-performing models in each simulation.
Table 20.
A comparison between the best-performing models in each simulation.
| Simulation Method | R2 | MAE | MSE | RMSE | IoA |
|---|
| Elm Crescent simulations | | | | | |
| RNN-DOAVNS | 0.358764 | 0.024683 | 0.000943 | 0.030712 | 0.732794 |
| LSTM-DOAVNS | 0.283279 | 0.026561 | 0.001054 | 0.032469 | 0.627262 |
| GRU-DOAVNS | 0.364567 | 0.024732 | 0.000935 | 0.030573 | 0.714853 |
| Forest Road simulations | | | | | |
| RNN-DOAVNS | 0.411854 | 0.067344 | 0.007205 | 0.084881 | 0.758396 |
| LSTM-DOAVNS | 0.423220 | 0.066313 | 0.007066 | 0.084057 | 0.777800 |
| GRU-DOAVNS | 0.427637 | 0.066774 | 0.007011 | 0.083734 | 0.784870 |
Table 21.
Shapiro–Wilk scores for forecasting experiments for normality condition evaluation.
Table 21.
Shapiro–Wilk scores for forecasting experiments for normality condition evaluation.
| Approach | DOAVNS | VNS | GA | PSO | RSA | SCHO |
|---|
| Elm Crescent |
| Elm Crescent RNN | 0.032 | 0.029 | 0.041 | 0.028 | 0.024 | 0.036 |
| Elm Crescent LSTM | 0.031 | 0.034 | 0.023 | 0.032 | 0.027 | 0.033 |
| Elm Crescent GRU | 0.037 | 0.024 | 0.029 | 0.032 | 0.031 | 0.029 |
| Forest road |
| Forest Road RNN | 0.035 | 0.028 | 0.023 | 0.034 | 0.029 | 0.027 |
| Forest Road LSTM | 0.028 | 0.029 | 0.033 | 0.031 | 0.031 | 0.029 |
| Forest Road GRU | 0.030 | 0.034 | 0.024 | 0.028 | 0.028 | 0.031 |
Table 22.
Wilcoxon signed-rank test scores in forecasting experiments.
Table 22.
Wilcoxon signed-rank test scores in forecasting experiments.
| DOAVNS vs. Others | VNS | GA | PSO | RSA | SCHO |
|---|
| Elm Crescent |
| Elm Crescent RNN | 0.034 | 0.018 | 0.025 | 0.029 | 0.023 |
| Elm Crescent LSTM | 0.029 | 0.031 | 0.042 | 0.025 | 0.036 |
| Elm Crescent GRU | 0.039 | 0.037 | 0.041 | 0.039 | 0.034 |
| Forest road |
| Forest road RNN | 0.025 | 0.044 | 0.037 | 0.028 | 0.035 |
| Forest road LSTM | 0.032 | 0.038 | 0.024 | 0.039 | 0.037 |
| Forest road GRU | 0.031 | 0.035 | 0.034 | 0.028 | 0.029 |




 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}