
A Comprehensive Review of Power Converters for E-Mobility

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
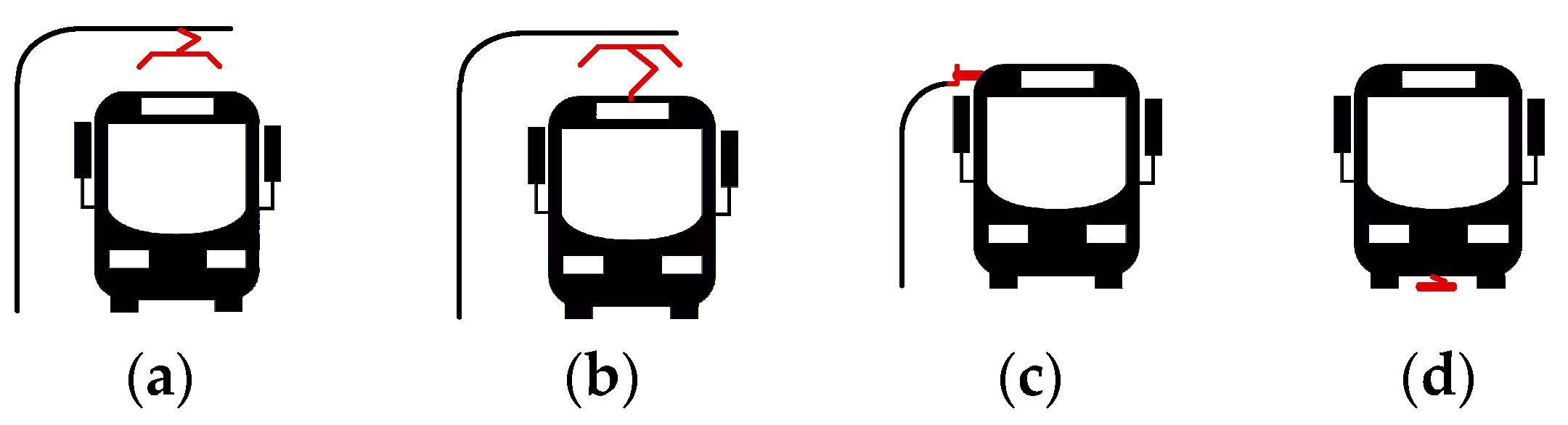
2. Charging Strategies and Methods for Electric Buses
3. Architectures and Converters Topologies for Fast Charging of Electric Vehicles and Electric Buses
3.1. Front-End AC–DC Converters
3.2. Back-End DC–DC Converters
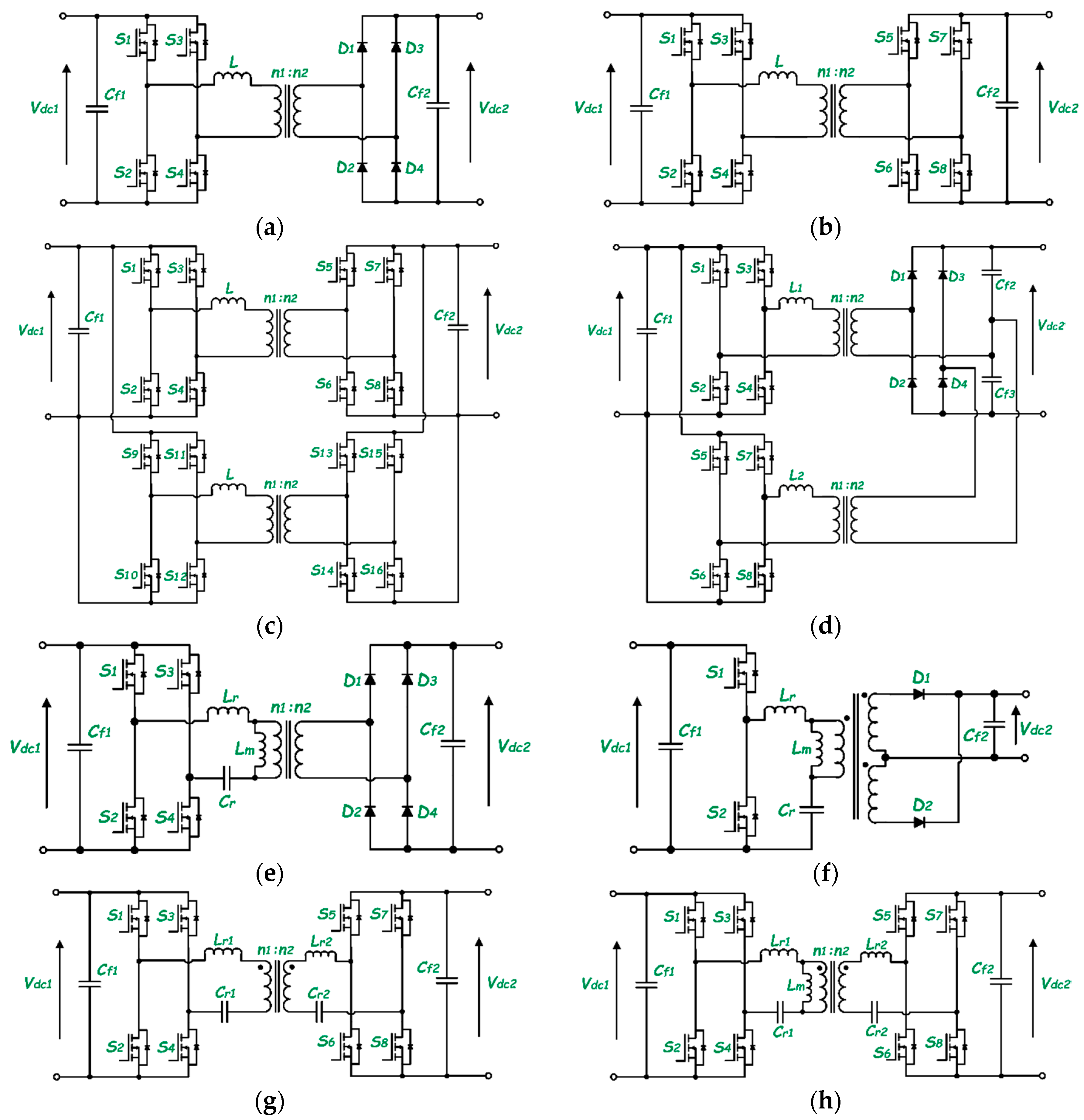
3.2.1. Isolated DC–DC Converters
3.2.2. Non-Isolated DC–DC Converters
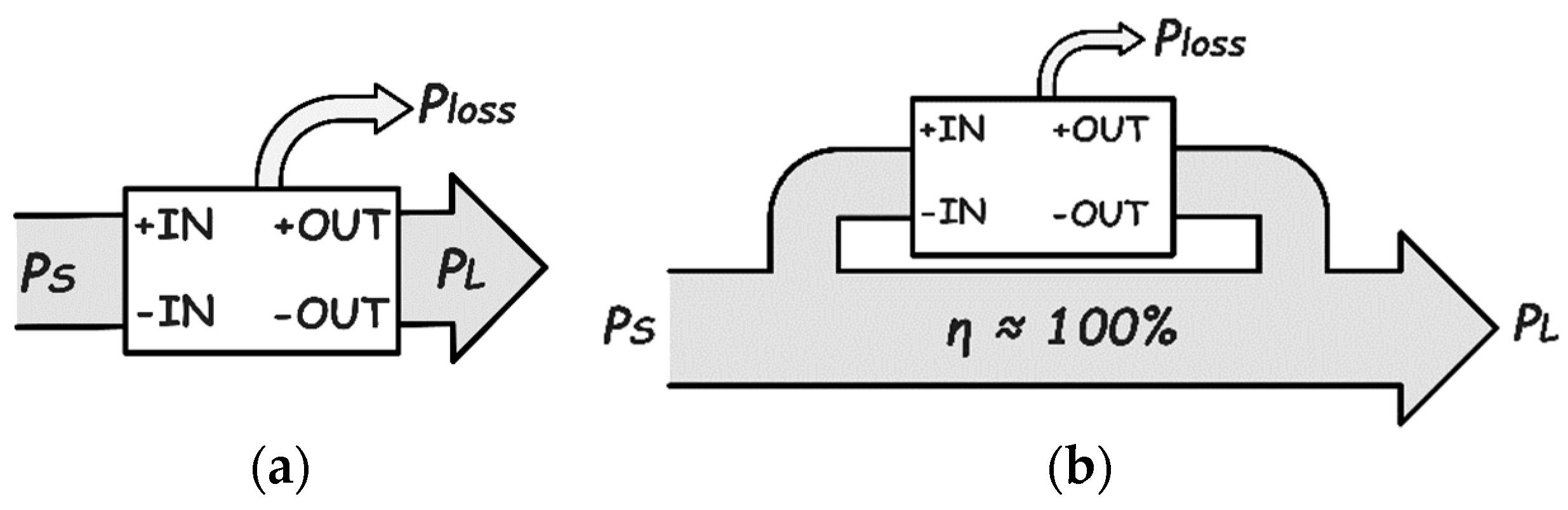
4. DC–DC Converters Based on Partial Processing of Power
5. Power Converters for Electrified Railway Systems
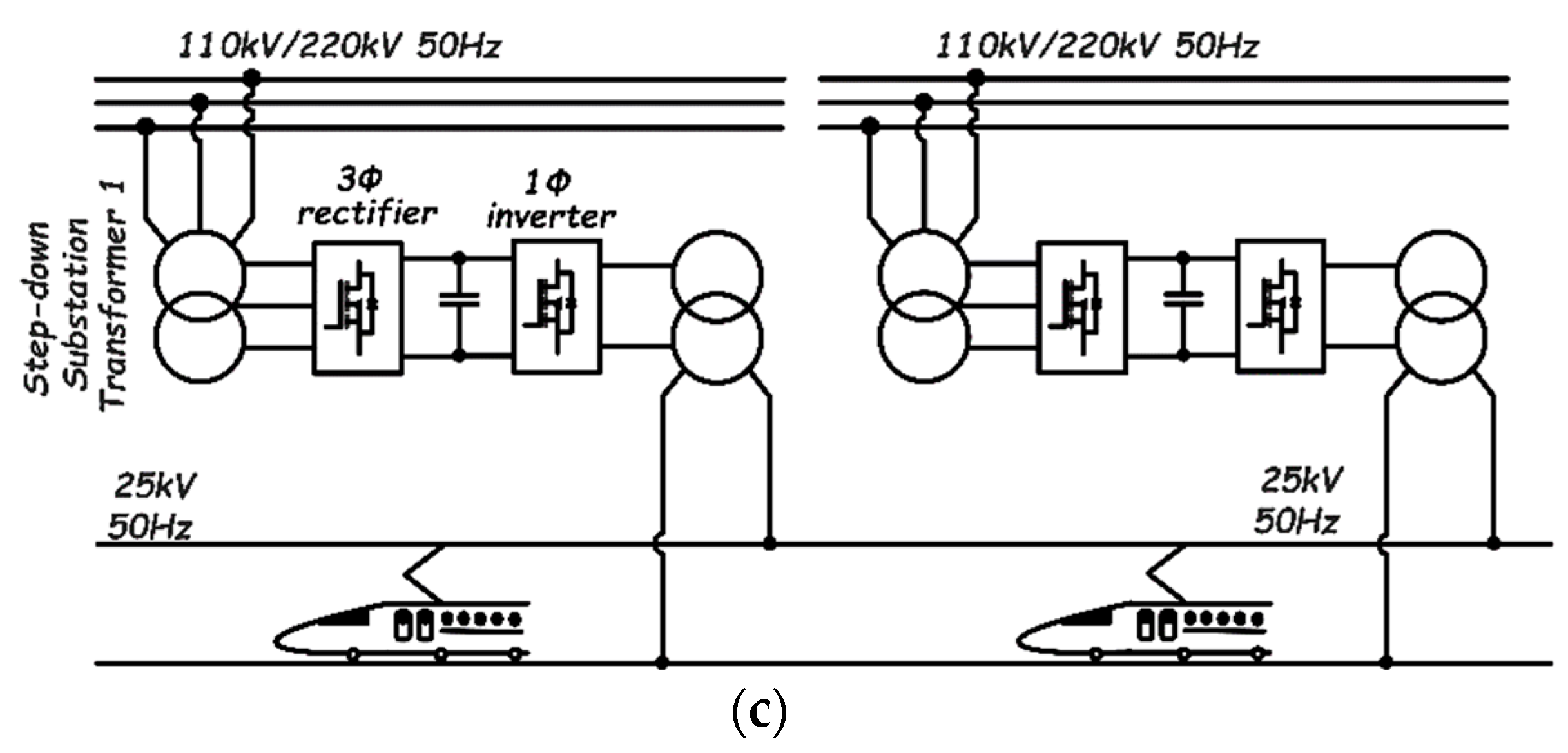
5.1. Power Supply Systems
5.2. Traction Drives
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Coal and Lignite Production. Available online: https://yearbook.enerdata.net/coal-lignite/coal-production-data.html (accessed on 11 December 2022).
- Crude Oil Production. Available online: https://yearbook.enerdata.net/crude-oil/world-production-statistics.html (accessed on 11 December 2022).
- Natural Gas Production. Available online: https://yearbook.enerdata.net/natural-gas/world-natural-gas-production-statistics.html (accessed on 11 December 2022).
- Boehm, S.; Lebling, K.; Levin, K.; Fekete, H.; Jaeger, J.; Waite, R.; Nilsson, A.; Thwaites, J.; Wilson, R.; Geiges, A.; et al. State of Climate Action 2021: Systems Transformations Required to Limit Global Warming to 1.5 °C; World Resoursec Institute: Washington, DC, USA, 2021. [Google Scholar]
- European Commision. The European Green Deal: Communication from the Commission to the European Parliament, the European Council, the Council, the European Economic and Social Committee and the Committee of the Regions; European Commision: Brussels, Belgium, 2019.
- Verbrugge, B.; Hasan, M.M.; Rasool, H.; Geury, T.; El Baghdadi, M.; Hegazy, O. Smart Integration of Electric Buses in Cities: A Technological Review. Sustainability 2021, 13, 12189. [Google Scholar] [CrossRef]
- Elma, O.; Gabber, H.A. Flywheel-Based Ultra-Fast On-Route Charging System for Public E-Buses. In Proceedings of the 2nd International Conference on Electrical, Communication and Computer Engineering (ICECCE 2020), Istanbul, Turkey, 12 June 2020; pp. 12–13. [Google Scholar]
- Osieczko, K.; Zimon, D.; Płaczek, E.; Prokopiuk, I. Factors That Influence the Expansion of Electric Delivery Vehicles and Trucks in EU Countries. J. Environ. Manag. 2021, 296, 113177. [Google Scholar] [CrossRef] [PubMed]
- Acri, R.A.; Barone, S.; Cambula, P.; Cecchini, V.; Falvo, M.C.; Lepore, J.; Manganelli, M.; Santi, F. Forecast of the Demand for Electric Mobility for Rome–Fiumicino International Airport. Energies 2021, 14, 5251. [Google Scholar] [CrossRef]
- Deb, S.; Kalita, K.; Mahanta, P. Impact of Electric Vehicle Charging Stations on Reliability of Distribution Network. In Proceedings of the 2017 IEEE International Conference on Technological Advancements in Power and Energy: Exploring Energy Solutions for an Intelligent Power Grid, TAP Energy 2017, Kollam, India, 21–23 December 2017; Volume 1, pp. 1–6. [Google Scholar]
- Steen, D.; Tuan, L.A. Fast Charging of Electric Buses in Distribution Systems. In Proceedings of the 2017 IEEE Manchester PowerTech, Powertech 2017, Manchester, UK, 18–22 June 2017. [Google Scholar]
- Pothinun, T.; Premrudeepreechacharn, S. Power Quality Impact of Charging Station on MV Distribution Networks: A Case Study in PEA Electrical Power System. In Proceedings of the 2018 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Tahir, Y.; Khan, I.; Rahman, S.; Nadeem, M.F.; Iqbal, A.; Xu, Y.; Rafi, M. A State-of-the-Art Review on Topologies and Control Techniques of Solid-State Transformers for Electric Vehicle Extreme Fast Charging. IET Power Electron. 2021, 14, 1560–1576. [Google Scholar] [CrossRef]
- Urcan, D.C.; Bica, D. Integrating and Modeling the Vehicle to Grid Concept in Micro-Grids. In Proceedings of the 2019 International Conference on ENERGY and ENVIRONMENT (CIEM), Timisoara, Romania, 17–18 October 2019; pp. 299–303. [Google Scholar] [CrossRef]
- Khalid, M.R.; Alam, M.S.; Sarwar, A.; Jamil Asghar, M.S. A Comprehensive Review on Electric Vehicles Charging Infrastructures and Their Impacts on Power-Quality of the Utility Grid. eTransportation 2019, 1, 100006. [Google Scholar] [CrossRef]
- Khalid, M.R.; Khan, I.A.; Hameed, S.; Asghar, M.S.J.; Ro, J.S. A Comprehensive Review on Structural Topologies, Power Levels, Energy Storage Systems, and Standards for Electric Vehicle Charging Stations and Their Impacts on Grid. IEEE Access 2021, 9, 128069–128094. [Google Scholar] [CrossRef]
- Turksoy, O.; Yilmaz, U.; Teke, A. Overview of Battery Charger Topologies in Plug-In Electric and Hybrid Electric Vehicles. In Proceedings of the 16th International Conference on Clean Energy (ICCE-2018), Famagusta, Cyprus, 9–11 May 2018; pp. 1–8. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-in Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Dusmez, S.; Cook, A.; Khaligh, A. Comprehensive Analysis of High Quality Power Converters for Level 3 Off-Board Chargers. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, VPPC 2011, Chicago, IL, USA, 6–9 September 2011. [Google Scholar]
- Wu, H.H.; Masquelier, M.P. An Overview of a 50kW Inductive Charging System for Electric Buses. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015; pp. 31–34. [Google Scholar] [CrossRef]
- Mansour, C.J.; Haddad, M.G. Sustainable Oil and Gas Development in Lebanon Transport Sector Bus Study; Ministry of Energy and Water: Beirut, Lebanon, 2017.
- Sawilla, S.; Schütt, O. Hands on Sustainable Mobility Technical Overview of Inductive Charging for Electric Buses in Europe. In Proceedings of the Hands on Sustainable Mobility—International Students Workshop and Conference, Karlsruhe, Germany, 19–24 May 2019. [Google Scholar]
- Arif, S.M.; Lie, T.T.; Seet, B.C.; Ayyadi, S.; Jensen, K. Review of Electric Vehicle Technologies, Charging Methods, Standards and Optimization Techniques. Electronics 2021, 10, 1910. [Google Scholar] [CrossRef]
- Pee, A.; Engel, H.; Guldemond, M.; Keizer, A.; van de Staaij, J. The European Electric Bus Market Is Charging Ahead, but How Will It Develop? In Energy Insights by McKinsey; McKinsey & Company: Atalanta, GA, USA, 2018; pp. 1–10. [Google Scholar]
- Al-Saadi, M.; Patkowski, B.; Zaremba, M.; Karwat, A.; Pol, M.; Chełchowski, Ł.; Van Mierlo, J.; Berecibar, M. Slow and Fast Charging Solutions for Li-Ion Batteries of Electric Heavy-Duty Vehicles with Fleet Management Strategies. Sustainability 2021, 13, 10639. [Google Scholar] [CrossRef]
- Balde, B.J.; Sardar, A. Electric Road System with Dynamic Wireless Charging of Electric Buses. In Proceedings of the 2019 IEEE Transportation Electrification Conference, ITEC-India 2019, Bengaluru, India, 17–19 December 2019. [Google Scholar]
- Tavakoli, R.; Jovicic, A.; Chandrappa, N.; Bohm, R.; Pantic, Z. Design of a Dual-Loop Controller for in-Motion Wireless Charging of an Electric Bus. In Proceedings of the ECCE 2016–IEEE Energy Conversion Congress and Exposition, Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Far, M.F.; Paakkinen, M.; Cremers, P. A Framework for Charging Standardisation of Electric Buses in Europe. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference, VPPC 2020, Gijón, Spain, 26–29 October 2020; pp. 2020–2023. [Google Scholar]
- Elma, O.; Adham, M.I.; Gabbar, H.A. Effects of Ultra-Fast Charging System for Battery Size of Public Electric Bus. In Proceedings of the 2020 8th International Conference on Smart Energy Grid Engineering, SEGE 2020, Oshawa, ON, Canada, 12–14 August 2020; pp. 142–147. [Google Scholar]
- Leserer, J. Charging by Pantograph—Short Charging Break for Electric Commercial Vehicles; Techinical Article; Vector Informatik GmbH: Stuttgart, Germany, 2021; pp. 1–4. Available online: https://cdn.vector.com/cms/content/know-how/_technical-articles/Emobility_Pantograph_ElektronikAutomotive_202010_PressArticle_EN.pdf (accessed on 30 January 2023).
- Arora, S.; Abkenar, A.T.; Jayasinghe, S.G.; Tammi, K. Charging Technologies and Standards Applicable to Heavy-Duty Electric Vehicles. In Heavy-Duty Electric Vehicles; Butterworth-Heinemann: Oxford, UK, 2021; pp. 135–155. ISBN 978-0-12-818126-3. [Google Scholar]
- Vincent, K.; Bouali, F.; Haas, O.; Christensen, J.; Bastien, C.; Davies, H.; Taghavifar, H.; Diederich, A.; Harrison, A. How Autonomous Vehicles Can Contribute to Emission Reductions, Fuel Economy Improvements and Safety? In Alternative Fuels and Advanced Vehicle Technologies for Improved Environmental Performance; Woodhead Publishing: Sawston, UK, 2022; pp. 711–741. [Google Scholar]
- Sbordone, D.; Bertini, I.; Di Pietra, B.; Falvo, M.C.; Genovese, A.; Martirano, L. EV Fast Charging Stations and Energy Storage Technologies: A Real Implementation in the Smart Micro Grid Paradigm. Electr. Power Syst. Res. 2015, 120, 96–108. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Monteiro, V.; Monteiro, L.F.C.; Lo Franco, F.; Mandrioli, R.; Ricco, M.; Grandi, G.; Afonso, J.L. The Role of Front-End AC/DC Converters in Hybrid AC/DC Smart Homes: Analysis and Experimental Validation. Electronics 2021, 10, 2601. [Google Scholar] [CrossRef]
- Vieira, J.L.F.; Oliver, J.A.; Alou, P.; Cobos, J.A. Power Converter Topologies for a High Performance Transformer Rectifier Unit in Aircraft Applications. In Proceedings of the 2014 11th IEEE/IAS International Conference on Industry Applications, IEEE INDUSCON 2014, Juiz de Fora, Brazil, 7–10 December 2014. [Google Scholar]
- Afonso, J.L.; Cardoso, L.A.L.; Pedrosa, D.; Sousa, T.J.C.; MacHado, L.; Tanta, M.; Monteiro, V. A Review on Power Electronics Technologies for Electric Mobility. Energies 2020, 13, 6343. [Google Scholar] [CrossRef]
- Anderson, J.A.; Haider, M.; Bortis, D.; Kolar, J.W.; Kasper, M.; Deboy, G. New Synergetic Control of a 20kw Isolated Vienna Rectifier Front-End Ev Battery Charger. In Proceedings of the 2019 IEEE 20th Workshop on Control and Modeling for Power Electronics, COMPEL 2019, Toronto, ON, Canada, 16–19 June 2019. [Google Scholar]
- Town, G.; Taghizadeh, S.; Deilami, S. Review of Fast Charging for Electrified Transport: Demand, Technology, Systems, and Planning. Energies 2022, 15, 1276. [Google Scholar] [CrossRef]
- Ancuti, M.C.; Musuroi, S.; Sorandaru, C.; Svoboda, M.; Voian, V.M.; Olarescu, V.N. Comparative Analysis of Vienna Interleaved Three-Phase Power Factor Correction Rectifier over Other Ultra-Efficient Topologies. In Proceedings of the 2019 International Conference on ENERGY and ENVIRONMENT (CIEM 2019), Timisoara, Romania, 17–18 October 2019; pp. 484–489. [Google Scholar]
- Seok, J.K.; Parastar, A. Modeling and Control of the Average Input Current for Three-Phase Interleaved Boost Converters. IEEE Trans. Ind. Appl. 2015, 51, 2340–2351. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Lu, T.; Jin, L. An Integrated Control Method for Three-Level NPC Based PWM Rectifier-Inverter. In Proceedings of the 2nd International Symposium on Power Electronics for Distributed Generation Systems (PEDG 2010), Heifei, China, 16–18 June 2010; pp. 616–620. [Google Scholar]
- Rivera, S.; Member, S.; Wu, B.; Kouro, S.; Yaramasu, V.; Wang, J. Neutral Point Clamped Converter With Bipolar DC Bus. IEEE Trans. Ind. Electron. 2015, 62, 1999–2009. [Google Scholar] [CrossRef]
- Guedouani, R.; Fiala, B.; Berkouk, E.M.; Boucherit, M.S. Control of Capacitor Voltage of Three Phase Five-Level NPC Voltage Source Inverter. Application to Inductor Motor Drive. In Proceedings of the International Aegean Conference on Electrical Machines and Power Electronics and Electromotion (ACEMP’07 and Electromotion’07 Joint Conference), Bodrum, Turkey, 10–12 September 2007; pp. 794–799. [Google Scholar]
- Hadjeras, S.; Sanchez, C.A.; Gomez-Estern Aguilar, F.; Gordillo, F.; Garcia, G. Hybrid Control Law for a Three-Level NPC Rectifier. In Proceedings of the 2019 18th European Control Conference (ECC 2019), Naples, Italy, 25–28 June 2019; pp. 281–286. [Google Scholar]
- Ventosa-Cutillas, A.; Montero-Robina, P.; Umbría, F.; Cuesta, F.; Gordillo, F. Integrated Control and Modulation for Three-Level NPC Rectifiers. Energies 2019, 12, 1641. [Google Scholar] [CrossRef]
- Friedli, T.; Hartmann, M.; Kolar, J.W. The Essence of Three-Phase PFC Rectifier Systems-Part II. IEEE Trans. Power Electron. 2014, 29, 543–560. [Google Scholar] [CrossRef]
- Soeiro, T.B.; Friedli, T.; Kolar, J.W. Swiss Rectifier—A Novel Three-Phase Buck-Type PFC Topology for Electric Vehicle Battery Charging. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC 2012), Orlando, FL, USA, 5–9 February 2012; pp. 2617–2624. [Google Scholar]
- Soeiro, T.B.; Friedli, T.; Kolar, J.W. Design and Implementation of a Three-Phase Buck-Type Third Harmonic Current Injection PFC Rectifier SR. IEEE Trans. Power Electron. 2013, 28, 1608–1621. [Google Scholar] [CrossRef]
- Siwakoti, Y.P.; Forouzesh, M.; Ha Pham, N. Power Electronics Converters—An Overview. In Control of Power Electronic Converters and Systems; Academic Press: Cambridge, MA, USA, 2018; pp. 3–29. ISBN 9780128052457. [Google Scholar]
- Hartmann, M.; Friedli, T.; Kolar, J. Three-Phase Unity Power Factor Mains Interfaces of High Power EV Battery Charging Systems. In Proceedings of the Power Electronics for Charging Electric Vehicles (ECPE Workshop), Valencia, Spain, 21–22 March 2011; pp. 21–22. [Google Scholar]
- Schrittwieser, L.; Member, S.; Kolar, J.W. At Sector Boundaries. IEEE Trans. Power Electron. 2017, 32, 5771–5785. [Google Scholar] [CrossRef]
- Vancu, M.F.; Soeiro, T.; Muhlethaler, J.; Kolar, J.W.; Aggeler, D. Comparative Evaluation of Bidirectional Buck-Type PFC Converter Systems for Interfacing Residential DC Distribution Systems to the Smart Grid. In Proceedings of the 2012 Industrial Electronics Conference (IECON 2012), Montreal, QC, Canada, 25–28 October 2012; pp. 5153–5160. [Google Scholar]
- Silva, M.; Hensgens, N.; Oliver, J.A.; Alou, P.; Garcia, O.; Cobos, J.A. Isolated Swiss-Forward Three-Phase Rectifier with Resonant Reset. IEEE Trans. Power Electron. 2016, 31, 4795–4808. [Google Scholar] [CrossRef]
- Zhao, S.; Silva, M.; Oliver, J.A.; Alou, P.; Garcia, O.; Cobos, J.A. Analysis and Design of an Isolated Single-Stage Three-Phase Full-Bridge with Current Injection Path PFC Rectifier for Aircraft Application. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE 2015), Montreal, QC, Canada, 20–24 September 2015; pp. 6777–6784. [Google Scholar]
- Bai, S.; Du, Y.; Lukic, S. Optimum Design of an EV/PHEV Charging Station with DC Bus and Storage System. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition (ECCE 2010), Atalanta, GA, USA, 12–16 September 2010; pp. 1178–1184. [Google Scholar]
- Damin, Z.; Shitao, W.; Fengwu, Z.; Lujun, W.; Zhengyu, L. Predictive Fast DSP-Based Current Controller for a 12-Pulse Hybrid-Mode Thyristor Rectifier. IEEE Trans. Power Electron. 2013, 28, 5263–5271. [Google Scholar] [CrossRef]
- Fukuda, S.; Hiei, I. Auxiliary Supply-Assisted 12-Pulse Phase-Controlled. IEEE Trans. Ind. Appl. 2008, 44, 205–212. [Google Scholar] [CrossRef]
- Bai, S.; Lukic, S.M. Unified Active Filter and Energy Storage System for an MW Electric Vehicle Charging Station. IEEE Trans. Power Electron. 2013, 28, 5793–5803. [Google Scholar] [CrossRef]
- Bai, S.; Lukic, S.M. New Method to Achieve AC Harmonic Elimination and Energy Storage Integration for 12-Pulse Diode Rectifiers. IEEE Trans. Ind. Electron. 2013, 60, 2547–2554. [Google Scholar] [CrossRef]
- Chakraborty, S.; Vu, H.N.; Hasan, M.M.; Tran, D.D.; El Baghdadi, M.; Hegazy, O. DC-DC Converter Topologies for Electric Vehicles, Plug-in Hybrid Electric Vehicles and Fast Charging Stations: State of the Art and Future Trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef]
- Lee, J.Y.; Chen, J.H.; Lo, K.Y. An Interleaved Phase-Shift Full-Bridge Converter with Dynamic Dead Time Control for Server Power Applications. Energies 2021, 14, 853. [Google Scholar] [CrossRef]
- Zhou, H.; Duong, T.; Sing, S.T.; Khambadkone, A.M. Interleaved Bi-Directional Dual Active Bridge DC-DC Converter for Interfacing Ultracapacitor in Micro-Grid Application. In Proceedings of the IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 2229–2234. [Google Scholar]
- Soejima, T.; Ishizuka, Y.; Domoto, K.; Hirose, T. Adaptive Control Technique for High Power Efficiency Dual Active Bridge DC-DC Converter with Wide Load Range. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 2829–2834. [Google Scholar]
- Gautam, D.; Musavi, F.; Edington, M.; Eberle, W.; Dunford, W.G. An Isolated Interleaved DC-DC Converter with Voltage Doubler Rectifier for PHEV Battery Charger. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC 2013), Long Beach, CA, USA, 17–21 March 2013; pp. 3067–3072. [Google Scholar]
- Tytelmaier, K.; Husev, O.; Veligorskyi, O.; Yershov, R. A Review of Non-Isolated Bidirectional DC-DC Converters for Energy Storage Systems. In Proceedings of the 2016 2nd International Young Scientists Forum on Applied Physics and Engineering (YSF 2016), Kharkiv, Ukraine, 10–14 October 2016; pp. 22–28. [Google Scholar]
- Gautam, D.; Musavi, F.; Edington, M.; Eberle, W.; Dunford, W.G. An Interleaved ZVS Full-Bridge DC-DC Converter with Capacitive Output Filter for a PHEV Charger. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE 2012), Raleigh, NC, USA, 15–20 September 2012; pp. 2827–2832. [Google Scholar]
- Gautam, D.S.; Musavi, F.; Eberle, W.; Dunford, W.G. A Zero-Voltage Switching Full-Bridge DC-DC Converter with Capacitive Output Filter for Plug-in Hybrid Electric Vehicle Battery Charger. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 1381–1386. [Google Scholar]
- Liu, Y.C.; Chen, C.; Chen, K.D.; Syu, Y.L.; Tsai, M.C. Devices and Integrated Magnetics. Energies 2019, 12, 1781. [Google Scholar] [CrossRef]
- Wang, H.; Li, Z. A PWM LLC Type Resonant Converter Adapted to Wide Output Range in PEV Charging Applications. IEEE Trans. Power Electron. 2018, 33, 3791–3801. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, Q.; Mantooth, A. A Hybrid Half-Bridge LLC Resonant Converter and Phase Shifted Full-Bridge Converter for High Step-up Application. In Proceedings of the 2020 IEEE Workshop on Wide Bandgap Power Devices and Applications in Asia (WiPDA Asia 2020), Suita, Japan, 25–27 May 2020. [Google Scholar]
- Chung, S.K.; Kang, B.G.; Kim, M.S. Constant Frequency Control of LLC Resonant Converter Using Switched Capacitor. Electron. Lett. 2013, 49, 1556–1558. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, Q.; Chen, S.; Sun, P.; Altin, N. Comparison among Different Analysis Methodologies for LLC Resonant Converter. IET Power Electron. 2019, 12, 2236–2244. [Google Scholar] [CrossRef]
- Sun, X.; Li, X.; Shen, Y.; Wang, B.; Guo, X. Dual-Bridge LLC Resonant Converter with Fixed-Frequency PWM Control for Wide Input Applications. IEEE Trans. Power Electron. 2017, 32, 69–80. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, Q.; Du, X.; Altin, N.; Nasiri, A.; Alonso, J.M. A Dual Half-Bridge LLC Resonant Converter with Magnetic Control for Battery Charger Application. IEEE Trans. Power Electron. 2020, 35, 2196–2207. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, Q.; Mantooth, A. Overview of Modulation Strategies for LLC Resonant Converter. IEEE Trans. Power Electron. 2020, 35, 10423–10443. [Google Scholar] [CrossRef]
- Li, B.; Lee, F.C.; Li, Q.; Liu, Z. Bi-Directional on-Board Charger Architecture and Control for Achieving Ultra-High Efficiency with Wide Battery Voltage Range. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC 2017), Orlando, FL, USA, 19–23 March 2017; pp. 3688–3694. [Google Scholar]
- Yan, Y.; Chang, Y.-N.; Peng, Z.-X. Design of a Bidirectional CL3C Full-Bridge Resonant Converter for Battery Energy Storage Systems. Energies 2022, 15, 412. [Google Scholar] [CrossRef]
- Liu, Y.; Du, G.; Wang, X.; Lei, Y. Analysis and Design of High-Efficiency Bidirectional GaN-Based CLLC Resonant Converter. Energies 2019, 12, 3859. [Google Scholar] [CrossRef]
- Chiou, G.J.; He, C.Y.; Chen, J.Y.; Chien, C.Y. Implementation of an Interleaved Bidirectional CLLC Resonant Full-Bridge DC-DC Converter Based on 48-Volt Bus. In Proceedings of the 2021 IEEE International Future Energy Electronics Conference (IFEEC 2021), Taipei, Taiwan, 16–19 November 2021; pp. 1–6. [Google Scholar]
- Chang, H.T.; Liang, T.J.; Yang, W.C. Design and Implementation of Bidirectional DC-DC CLLLC Resonant Converter. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 2712–2719. [Google Scholar]
- Zong, S.; Fan, G.; Yang, X. Double Voltage Rectification Modulation for Bidirectional CLLLC Resonant Converter for Wide Voltage Range Operation. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC 2018), Sheznhen, China, 4–7 November 2018; pp. 21–26. [Google Scholar]
- Lei, H.; Huizhuo, M.; Xingyu, C.; Kang, Z. Research on CLLLC Resonant Bidirectional DC-DC Converter. J. Phys. Conf. Ser. 2021, 1993, 012012. [Google Scholar] [CrossRef]
- Sasi, D.K.; Haryhar, A.S.; Gopi, L. An Improved Step-down Conversion Ratio Interleaved Buck Converter for Aircraft Applications. In Proceedings of the 2018 IEEE International Conference on Power, Instrumentation, Control and Computing (PICC 2018), Thrissur, India, 18–20 January 2018; pp. 1–6. [Google Scholar]
- El Kattel, M.B.; Mayer, R.; Possamai, M.D.; Vidal Garcia Oliveira, S. A Simplified Analysis of Buck-Type Interleaved DC-DC Converter for Battery Chargers Application. In Proceedings of the 2019 IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference (COBEP/SPEC 2019), Santos, Brazil, 1–4 December 2019; pp. 1–5. [Google Scholar]
- Balen, G.; Reis, A.R.; Pinheiro, H.; Schuch, L. Modeling and Control of Interleaved Buck Converter for Electric Vehicle Fast Chargers. In Proceedings of the 14th Brazilian Power Electronics Conference (COBEP 2017), Juiz de Fora, Brazil, 19–22 November 2017; pp. 1–6. [Google Scholar]
- Cuoghi, S.; Mandrioli, R.; Ntogramatzidis, L.; Gabriele, G. Multileg Interleaved Buck Converter for EV Charging: Discrete-Time Model and Direct Control Design. Energies 2020, 13, 466. [Google Scholar] [CrossRef]
- Garg, A.; Das, M. High Efficiency Three Phase Interleaved Buck Converter for Fast Charging of EV. In Proceedings of the ICPEE 2021–2021 1st International Conference on Power Electronics and Energy, Bhubaneswar, India, 2–3 January 2021. [Google Scholar]
- de Melo, R.R.; Tofoli, F.L.; Daher, S.; Antunes, F.L.M. Interleaved Bidirectional DC–DC Converter for Electric Vehicle Applications Based on Multiple Energy Storage Devices. Electr. Eng. 2020, 102, 2011–2023. [Google Scholar] [CrossRef]
- Grbović, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. A Bidirectional Three-Level DC-DC Converter for the Ultracapacitor Applications. IEEE Trans. Ind. Electron. 2010, 57, 3415–3430. [Google Scholar] [CrossRef]
- Rivera, S.; Wu, B. Electric Vehicle Charging Station With an Energy Storage Stage for Split-DC Bus Voltage Balancing. IEEE Trans. Power Electron. 2017, 32, 2376–2386. [Google Scholar] [CrossRef]
- Choi, W.Y.; Yang, M.K. Soft-Switching Bidirectional Three-Level DC-DC Converter with Simple Auxiliary Circuit. Electronics 2019, 8, 983. [Google Scholar] [CrossRef]
- Chen, J.; Wang, C.; Li, J.; Jiang, C.; Duan, C. A Nonisolated Three-Level Bidirectional DC-DC Converter. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 1566–1570. [Google Scholar]
- Jin, K.; Yang, M.; Ruan, X.; Xu, M. Three-Level Bidirectional Converter for Fuel-Cell/Battery Hybrid Power System. IEEE Trans. Ind. Electron. 2010, 57, 1976–1986. [Google Scholar] [CrossRef]
- Tan, L.; Wu, B.; Yaramasu, V.; Rivera, S. Effective Voltage Balance Control for Three-Level Bidirectional DC-DC Converter Based Electric Vehicle Fast Charger. In Proceedings of the 2015 10th IEEE Conference on Industrial Electronics and Applications (ICIEA 2015), Auckland, New Zealand, 15–17 June 2015; pp. 357–362. [Google Scholar]
- Monteiro, V.; Ferreira, J.C.; Nogueiras Melendez, A.A.; Couto, C.; Afonso, J.L. Experimental Validation of a Novel Architecture Based on a Dual-Stage Converter for Off-Board Fast Battery Chargers of Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 1000–1011. [Google Scholar] [CrossRef]
- Tan, L.; Zhu, N.; Wu, B. An Integrated Inductor for Eliminating Circulating Current of Parallel Three-Level DC-DC Converter-Based EV Fast Charger. IEEE Trans. Ind. Electron. 2016, 63, 1362–1371. [Google Scholar] [CrossRef]
- Keyhani, H.; Toliyat, H.A. Flying-Capacitor Boost Converter. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 2311–2318. [Google Scholar]
- Jayan, V.; Ghias, A.; Merabet, A. Modeling and Control of Three-Level Bi-Directional Flying Capacitor DC-DC Converter in DC Microgrid. In Proceedings of the 2019 Industrial Electronics Conference (IECON 2019), Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 4113–4118. [Google Scholar]
- Chen, H.C.; Lu, C.Y.; Lien, W.H.; Chen, T.H. Active Capacitor Voltage Balancing Control for Three-Level Flying Capacitor Boost Converter Based on Average-Behavior Circuit Model. IEEE Trans. Ind. Appl. 2019, 55, 1628–1638. [Google Scholar] [CrossRef]
- Shukla, A.; Ghosh, A.; Joshi, A. Capacitor Voltage Balancing Schemes in Flying Capacitor Multilevel Inverters. In Proceedings of the 2007 IEEE Annual Power Electronics Specialists Conference (PESC Record), Orlando, FL, USA, 17–21 June 2007; pp. 2367–2372. [Google Scholar]
- Khazraei, M.; Sepahvand, H.; Corzine, K.A.; Ferdowsi, M. Active Capacitor Voltage Balancing in Single-Phase Flying-Capacitor Multilevel Power Converters. IEEE Trans. Ind. Electron. 2012, 59, 769–778. [Google Scholar] [CrossRef]
- Khazraei, M.; Sepahvand, H.; Corzine, K.; Ferdowsi, M. A Generalized Capacitor Voltage Balancing Scheme for Flying Capacitor Multilevel Converters. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; Volume 6, pp. 58–62. [Google Scholar]
- Waffler, S.; Kolar, J.W. A Novel Low-Loss Modulation Strategy for High-Power Bidirectional Buck + Boost Converters. IEEE Trans. Power Electron. 2009, 24, 1589–1599. [Google Scholar] [CrossRef]
- Ravi, D.; Letha, S.S.; Samuel, P.; Reddy, B.M. An Overview of Various DC-DC Converter Techniques Used for Fuel Cell Based Applications. In Proceedings of the 2018 International Conference on Power Energy, Environment and Intelligent Control (PEEIC 2018), Greater Noida, India, 13–14 April 2019; pp. 16–21. [Google Scholar]
- Alatai, S.; Salem, M.; Ishak, D.; Das, H.S.; Nazari, M.A.; Bughneda, A.; Kamarol, M. A Review on State-of-the-Art Power Converters: Bidirectional, Resonant, Multilevel Converters and Their Derivatives. Appl. Sci. 2021, 11, 10172. [Google Scholar] [CrossRef]
- Liu, K.B.; Liu, C.Y.; Liu, Y.H.; Chien, Y.C.; Wang, B.S.; Wong, Y.S. Analysis and Controller Design of a Universal Bidirectional DC-DC Converter. Energies 2016, 9, 501. [Google Scholar] [CrossRef]
- Dung, N.A.; Hieu, P.P.; Hsieh, Y.C.; Lin, J.Y.; Liu, Y.C.; Chiu, H.J. A Novel Low-Loss Control Strategy for Bidirectional DC–DC Converter. Int. J. Circuit Theory Appl. 2017, 45, 1801–1813. [Google Scholar] [CrossRef]
- Kim, D.H.; Lee, B.K. An Enhanced Control Algorithm for Improving the Light-Load Efficiency of Noninverting Synchronous Buck-Boost Converters. IEEE Trans. Power Electron. 2016, 31, 3395–3399. [Google Scholar] [CrossRef]
- Crocker, T.R. Power Converter and Method for Power Conversion. U.S. Patent 6,914,420, 28 May 2002. [Google Scholar]
- Monteiro, V.; Oliveira, C.; Rodrigues, A.; Sousa, T.J.C.; Pedrosa, D.; MacHado, L.; Afonso, J.L. A Novel Topology of Multilevel Bidirectional and Symmetrical Split-Pi Converter. In Proceedings of the 2020 IEEE 14th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2020), Setubal, Portugal, 8–10 July 2020; pp. 511–516. [Google Scholar]
- Khan, M.A.; Husain, I.; Sozer, Y. A Bidirectional DC–DC Converter With Overlapping Input and Output Voltage Ranges and Vehicle to Grid Energy Transfer Capability. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 507–516. [Google Scholar] [CrossRef]
- Kabalci, E. Power Electronics and Drives Used in Automotive Applications. In Autonomous Vehicles: Intelligent Transport Systems and Smart Technologies; Bizon, N., Dascalescu, L., Tabatabaei, N.M., Eds.; Nova Science Publishers: New York, NY, USA, 2014; pp. 249–273. ISBN 978-1-63321-324-1. [Google Scholar]
- Singhai, M.; Pilli, N.; Singh, S.K. Modeling and Analysis of Split-Pi Converter Using State Space Averaging Technique. In Proceedings of the 2014 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES 2014), Mumbai, India, 16–19 December 2014. [Google Scholar]
- Sabatta, D.; Meyer, J. Super Capacitor Management Using a Split-Pi Symmetrical Bi-Directional DC-DC Power Converter with Feed-Forward Gain Control. In Proceedings of the 2018 International Conference on the Domestic Use of Energy (DUE 2018), Cape Town, South Africa, 3–5 April 2018; pp. 1–5. [Google Scholar]
- Alzahrani, A.; Shamsi, P.; Ferdowsi, M. Single and Interleaved Split-Pi DC-DC Converter. In Proceedings of the 2017 6th International Conference on Renewable Energy Research and Applications (ICRERA 2017), San Diego, CA, USA, 5–8 November 2017; pp. 995–1000. [Google Scholar]
- Mumtaz, F.; Zaihar Yahaya, N.; Tanzim Meraj, S.; Singh, B.; Kannan, R.; Ibrahim, O. Review on Non-Isolated DC-DC Converters and Their Control Techniques for Renewable Energy Applications. Ain Shams Eng. J. 2021, 12, 3747–3763. [Google Scholar] [CrossRef]
- Mohammadi, M.R.; Farzanehfard, H. A New Bidirectional ZVS-PWM Cuk Converter with Active Clamp. In Proceedings of the 2011 19th Iranian Conference on Electrical Engineering (ICEE 2011), Tehran, Iran, 17–19 May 2011. [Google Scholar]
- Tie, S.F.; Tan, C.W. A Review of Energy Sources and Energy Management System in Electric Vehicles. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Dimna Denny, C.; Shahin, M. Analysis of Bidirectional SEPIC/Zeta Converter with Coupled Inductor. In Proceedings of the 2015 IEEE International Conference on Technological Advancements in Power and Energy (TAP Energy 2015), Kollam, India, 24–26 June 2015; pp. 103–108. [Google Scholar]
- Gayen, P.K.; Roy Chowdhury, P.; Dhara, P.K. An Improved Dynamic Performance of Bidirectional SEPIC-Zeta Converter Based Battery Energy Storage System Using Adaptive Sliding Mode Control Technique. Electr. Power Syst. Res. 2018, 160, 348–361. [Google Scholar] [CrossRef]
- Song, M.S.; Son, Y.D.; Lee, K.H. Non-Isolated Bidirectional Soft-Switching SEPIC/ZETA Converter with Reduced Ripple Currents. J. Power Electron. 2014, 14, 649–660. [Google Scholar] [CrossRef]
- Qi, X.; Wang, Y.; Fang, M.; Wang, Y.; Chen, Z. Highly Integrated Centralized Equalizer Based on Zeta-Sepic Converter for Series-Connected Battery Strings. In Proceedings of the 2021 IEEE 2nd China International Youth Conference on Electrical Engineering (CIYCEE 2021), Chengdu, China, 12–17 December 2021. [Google Scholar]
- Kloenne, A.; Sigle, T. Bidirectional ZETA/SEPIC Converter as Battery Charging System with High Transfer Ratio. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar]
- Zarkab, M.; Singh, B.; Panigrahi, B.K. Model Predictive Control for Modular Electric Vehicle Charger. In Proceedings of the 9th IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES 2020), Jaipur, India, 16–19 December 2020. [Google Scholar]
- Han, J.; Gu, X.; Yang, Y.; Tang, T. Dynamic Improvement with a Feedforward Control Strategy of Bidirectional DC-DC Converter for Battery Charging and Discharging. Electronics 2020, 9, 1738. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Selvaraj, J. Experimental Validation of a Three-Phase Off-Board Electric Vehicle Charger with New Power Grid Voltage Control. IEEE Trans. Smart Grid 2018, 9, 2703–2713. [Google Scholar] [CrossRef]
- Canciello, G.; Cavallo, A.; Lo Schiavo, A.; Russo, A. Multi-Objective Adaptive Sliding Manifold Control for More Electric Aircraft. ISA Trans. 2020, 107, 316–328. [Google Scholar] [CrossRef] [PubMed]
- Ma, H.; Liu, Q.; Wang, Y. Discrete Pulse Frequency Modulation Control with Sliding-mode Implementation on LLC. IET Power Electron. 2014, 7, 1033–1043. [Google Scholar] [CrossRef]
- Bai, H.; Yang, D.; Song, J.; Su, Q.; Duan, B.; Zhang, C. Linear Active Disturbance Rejection Control of LLC Resonant Converters for EV Chargers. In Proceedings of the 2020 Chinese Automation Congress (CAC 2020), Shanghai, China, 6–8 November 2020; pp. 993–998. [Google Scholar]
- Xu, R.; Gao, S.; Wang, Y.; Xu, D. A High Step Up SEPIC-Based Partial-Power Converter with Wide Input Range. In Proceedings of the IAS Annual Meeting (IEEE Industry Applications Society), Vancouver, BC, Canada, 10–14 October 2021. [Google Scholar]
- Anzola, J.; Aizpuru, I.; Arruti, A. Non-Isolated Partial Power Converter for Electric Vehicle Fast Charging Stations. In Proceedings of the 2020 IEEE 11th International Symposium on Power Electronics for Distributed Generation Systems (PEDG 2020), Dubrovnik, Croatia, 28 September–1 October 2020; pp. 18–22. [Google Scholar]
- Zientarski, J.R.R.; Pinheiro, J.R.; Martins, M.L.D.S.; Hey, H.L. Understanding the Partial Power Processing Concept: A Case-Study of Buck-Boost DC/DC Series Regulator. In Proceedings of the 2015 IEEE 13th Brazilian Power Electronics Conference and 1st Southern Power Electronics Conference (COBEP/SPEC 2016), Fortaleza, Brazil, 29 November–2 December 2015; pp. 11–16. [Google Scholar]
- Agamy, M.S.; Harfman-Todorovic, M.; Elasser, A.; Chi, S.; Steigerwald, R.L.; Sabate, J.A.; McCann, A.J.; Zhang, L.; Mueller, F.J. An Efficient Partial Power Processing DC/DC Converter for Distributed PV Architectures. IEEE Trans. Power Electron. 2014, 29, 674–686. [Google Scholar] [CrossRef]
- Sundararaman, K.; Alagappan, P.; Elavarasu, R. Partial Processing Converters for Charging Electric Vehicles. In Proceedings of the 2021 1st International Conference on Advances in Electrical, Computing, Communications and Sustainable Technologies (ICAECT 2021), Bhilai, India, 19–20 February 2021. [Google Scholar]
- Rojas, J.; Renaudineau, H.; Kouro, S.; Rivera, S. Partial Power DC-DC Converter for Electric Vehicle Fast Charging Stations. In Proceedings of the IECON 2017–43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 November–1 December 2017. [Google Scholar]
- Iyer, V.M.; Gulur, S.; Gohil, G.; Bhattacharya, S. An Approach towards Extreme Fast Charging Station Power Delivery for Electric Vehicles with Partial Power Processing. IEEE Trans. Ind. Electron. 2020, 67, 8076–8087. [Google Scholar] [CrossRef]
- Artal-Sevil, J.S.; Ballestin-Bernad, V.; Coronado-Mendoza, A.; Bernal-Agustin, J.L. Design and Analysis of a Partial-Power Converter with an Active Power-Buffer for a Fuel Cell-Based Hybrid Electric Vehicle. In Proceedings of the 2021 IEEE Vehicle Power and Propulsion Conference (VPPC 2021), Gijón, Spain, 25–28 October 2021; pp. 1–6. [Google Scholar]
- Artal-Sevil, J.S.; Bernal-Ruiz, C.; Anzola, J.; Aizpuru, I.; Bono-Nuez, A.; Sanz-Alcaine, J.M. Partial Power Processing Architecture Applied to a Battery Energy Storage System. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference (VPPC 2020), Gijón, Spain, 26–29 October 2020. [Google Scholar]
- Iyer, V.M.; Gulur, S.; Bhattacharya, S.; Ramabhadran, R. A Partial Power Converter Interface for Battery Energy Storage Integration with a DC Microgrid. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE 2019), Baltimore, MD, USA, 29 September–3 October 2019; pp. 5783–5790. [Google Scholar]
- Anzola, J.; Aizpuru, I.; Romero, A.A.; Loiti, A.A.; Lopez-Erauskin, R.; Artal-Sevil, J.S.; Bernal, C. Review of Architectures Based on Partial Power Processing for DC-DC Applications. IEEE Access 2020, 8, 103405–103418. [Google Scholar] [CrossRef]
- Zhao, J.; Yeates, K.; Han, Y. Analysis of High Efficiency DC/DC Converter Processing Partial Input/Output Power. In Proceedings of the 2013 IEEE 14th Workshop on Control and Modeling for Power Electronics (COMPEL 2013), Salt Lake City, UT, USA, 23–26 June 2013. [Google Scholar]
- Lopusina, I.; Grbovic, P. Comparative Analysis of Input-Series-Output-Series Partial Power Rated DC to DC Converters. In Proceedings of the 2021 21st International Symposium on Power Electronics (Ee 2021), Novi Sad, Serbia, 28–30 October 2021. [Google Scholar]
- Anzola, J.; Aizpuru, I.; Arruti, A. Partial Power Processing Based Converter for Electric Vehicle Fast Charging Stations. Electronics 2021, 10, 260. [Google Scholar] [CrossRef]
- Xu, Q.; Ma, F.; He, Z.; Chen, Y.; Guerrero, J.M.; Luo, A.; Li, Y.; Yue, Y. Analysis and Comparison of Modular Railway Power Conditioner for High-Speed Railway Traction System. IEEE Trans. Power Electron. 2017, 32, 6031–6048. [Google Scholar] [CrossRef]
- Barros, L.A.M.; Tanta, M.; Martins, A.P.; Afonso, J.L.; Pinto, J.G. Opportunities and Challenges of Power Electronics Systems in Future Railway Electrification. In Proceedings of the 2020 IEEE 14th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2020), Setubal, Portugal, 8–10 July 2020; pp. 530–537. [Google Scholar]
- Belay Kebede, A.; Biru Worku, G. Power Electronics Converter Application in Traction Power Supply System. Am. J. Electr. Power Energy Syst. 2020, 9, 67. [Google Scholar] [CrossRef]
- Boora, A.A.; Zare, F.; Ghosh, A.; Ledwich, G. Applications of Power Electronics in Railway Systems. In Proceedings of the 2007 Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 9–12 December 2007; pp. 1–9. [Google Scholar]
- He, X.; Ren, H.; Lin, J.; Han, P.; Wang, Y.; Peng, X.; Shu, Z. Power Flow Analysis of the Advanced Co-Phase Traction Power Supply System. Energies 2019, 12, 754. [Google Scholar] [CrossRef]
- Zhao, Y.; Dai, N.; Wang, B. Application of Three-Phase Modular Multilevel Converter (MMC) in Co-Phase Traction Power Supply System. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC Asia-Pacific 2014), Beijing, China, 31 August–3 September 2014; pp. 14–19. [Google Scholar]
- He, X.; Shu, Z.; Peng, X.; Zhou, Q.; Zhou, Y.; Zhou, Q.; Gao, S. Advanced Cophase Traction Power Supply System Based on Three-Phase to Single-Phase Converter. IEEE Trans. Power Electron. 2014, 29, 5323–5333. [Google Scholar] [CrossRef]
- Vijaykumar, Y.N.; Vemulapati, V.; Visali, N.; Raju, K. Railway Power Supply System Using Modular Multilevel Converter with Droop Characteristics. In Proceedings of the 2020 4th International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 5–7 November 2020; pp. 12–20. [Google Scholar]
- Li, L.; Wu, M.; Wu, S.; Li, J.; Song, K. A Three-Phase to Single-Phase AC-DC-AC Topology Based on Multi-Converter in AC Electric Railway Application. IEEE Access 2019, 7, 111539–111558. [Google Scholar] [CrossRef]
- Winkelnkemper, M.; Korn, A.; Steimer, P. A Modular Direct Converter for Transformerless Rail Interties. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 562–567. [Google Scholar]
- He, X.; Guo, A.; Peng, X.; Zhou, Y.; Shi, Z.; Shu, Z. A Traction Three-Phase to Single-Phase Cascade Converter Substation in an Advanced Traction Power Supply System. Energies 2015, 8, 9915–9929. [Google Scholar] [CrossRef]
- Han, P.; He, X.; Wang, Y.; Ren, H.; Peng, X.; Shu, Z. Harmonic Analysis of Single-Phase Neutral-Point-Clamped Cascaded Inverter in Advanced Traction Power Supply System Based on the Big Triangular Carrier Equivalence Method. Energies 2018, 11, 431. [Google Scholar] [CrossRef]
- Ranneberg, J. Transformerless Topologies for Future Stationary AC-Railway Power Supply Keywords State of the Art SFC for Railway Supply SFCs Supplying Catenary Without Single-Phase Transformer. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–11. [Google Scholar]
- He, X.; Peng, J.; Han, P.; Liu, Z.; Gao, S.; Wang, P. A Novel Advanced Traction Power Supply System Based on Modular Multilevel Converter. IEEE Access 2019, 7, 165018–165028. [Google Scholar] [CrossRef]
- He, X.; Han, P.; Zhu, M.; Gao, S.; He, X.; Gao, S.; Wang, P. Advanced Traction Power Supply System Based on Modular Multilevel Converters. In Proceedings of the 2018 Asian Conference on Energy, Power and Transportation Electrification (ACEPT), Singapore, 30 October–2 November 2018. [Google Scholar]
- Chang, F.; Yang, Z.; Lin, F. Research on Control Strategy of AC-DC-AC Substation Based on Modular Multilevel Converter. Math. Probl. Eng. 2017, 2017, 4157165. [Google Scholar] [CrossRef]
- Vemulapati, V.; Vijayakumar, Y.N.; Visali, N. Droop Characteristics Based High Speed Traction Power Supply System Using Modular Multilevel Converter. In Proceedings of the 4th International Conference on Trends in Electronics and Informatics (ICOEI 2020), Tiruneveliu, India, 16–18 April 2020; pp. 111–118. [Google Scholar]
- Haridas, K.; Khandelwal, S.; Das, A. Three Phase to Single Phase Modular Multilevel Converter Using Full Bridge Cells. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES 2016), Trivandrum, India, 14–17 December 2016; pp. 1–5. [Google Scholar]
- Feng, J.; Chu, W.Q.; Zhang, Z.; Zhu, Z.Q. Power Electronic Transformer-Based Railway Traction Systems: Challenges and Opportunities. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1237–1253. [Google Scholar] [CrossRef]
- Ronanki, D.; Williamson, S.S. Evolution of Power Converter Topologies and Technical Considerations of Power Electronic Transformer-Based Rolling Stock Architectures. IEEE Trans. Transp. Electrif. 2017, 4, 211–219. [Google Scholar] [CrossRef]
- Abu-Siada, A.; Budiri, J.; Abdou, A.F. Solid State Transformers Topologies, Controllers, and Applications: State-of-the-Art Literature Review. Electronics 2018, 7, 298. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ker, P.J.; Lipu, M.S.H.; Choi, Z.H.; Rahman, M.S.A.; Muttaqi, K.M.; Blaabjerg, F. State of the Art of Solid-State Transformers: Advanced Topologies, Implementation Issues, Recent Progress and Improvements. IEEE Access 2020, 8, 19113–19132. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, K.; Chen, X.; Xiong, J. Simplified Model and Submodule Capacitor Voltage Balancing of Single-Phase AC/AC Modular Multilevel Converter for Railway Traction Purpose. IET Power Electron. 2016, 9, 951–959. [Google Scholar] [CrossRef]
- Carpita, M.; Pellerin, M.; Herminjard, J. Medium Frequency Transformer for Traction Applications Making Use of Multilevel Converter: Small Scale Prototype Test Results. In Proceedings of the 2006 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2006), Taormina, Italy, 23–26 May 2006; pp. 1095–1100. [Google Scholar]
- Roy, S.; De, A.; Bhattacharya, S. State Transformer for AC to DC Power. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 651–655. [Google Scholar]
- Zhao, C.; Lewdeni-Schmid, S.; Steinke, J.K.; Weiss, M.; Chaudhuri, T.; Pellerin, M.; Duron, J.; Stefanutti, P. Design, Implementation and Performance of a Modular Power Electronic Transformer (PET) for Railway Application. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications (EPE 2011), Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Shu, Z.; Kuang, Z.; Wang, S.; Peng, X.; He, X. Diode-Clamped Three-Level Multi-Module Cascaded Converter Based Power Electronic Traction Transformer. In Proceedings of the 2015 IEEE 2nd International Future Energy Electronics Conference (IFEEC 2015), Taipei, Taiwan, 1–4 November 2015. [Google Scholar]
- Alkawsi, G.; Baashar, Y.; Dallatu Abbas, U.; Alkahtani, A.A.; Tiong, S.K. Review of Renewable Energy-Based Charging Infrastructure for Electric Vehicles. Appl. Sci. 2021, 11, 3847. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Level 1 | Level 2 | Level 3 |
|---|---|---|---|
| Grid voltage | 120 VAC (US) 240 VAC (EU) | 240 VAC (US) 400 VAC (EU) | 208–600 VAC or VDC |
| Power range [kW] | ≤3.7 | 3.7–22 | >50 |
| Approximate charging time | 11–36 h | 1–6 h | 0.2–1 h |
| Charger topology | On-board | On-board | Off-board |
| Grid supply type | 1-phase | 1- or 3-phase | 3-phase |
| Charging type | Slow charge | Semi-fast charge | Fast charge |
| Battery capacity [kWh] | 15–50 | 15–50 | 15–50 |
| Typical use | Charging at home or office | Charging at private or public outlets | Commercial, just like a filling station |
| PPC Configuration | Kpr |
| IPOS step-up | |
| ISOP-I step-up | |
| ISOP-II step-up | |
| ISOP step-down | |
| IPOS-I step-down | |
| IPOS-II step-down |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nkembi, A.A.; Cova, P.; Sacchi, E.; Coraggioso, E.; Delmonte, N. A Comprehensive Review of Power Converters for E-Mobility. Energies 2023, 16, 1888. https://doi.org/10.3390/en16041888
Nkembi AA, Cova P, Sacchi E, Coraggioso E, Delmonte N. A Comprehensive Review of Power Converters for E-Mobility. Energies. 2023; 16(4):1888. https://doi.org/10.3390/en16041888
Chicago/Turabian StyleNkembi, Armel Asongu, Paolo Cova, Emilio Sacchi, Emanuele Coraggioso, and Nicola Delmonte. 2023. "A Comprehensive Review of Power Converters for E-Mobility" Energies 16, no. 4: 1888. https://doi.org/10.3390/en16041888
APA StyleNkembi, A. A., Cova, P., Sacchi, E., Coraggioso, E., & Delmonte, N. (2023). A Comprehensive Review of Power Converters for E-Mobility. Energies, 16(4), 1888. https://doi.org/10.3390/en16041888