
Performance Analysis of an Electromagnetic Frequency Regulator under Parametric Variations for Wind System Applications

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
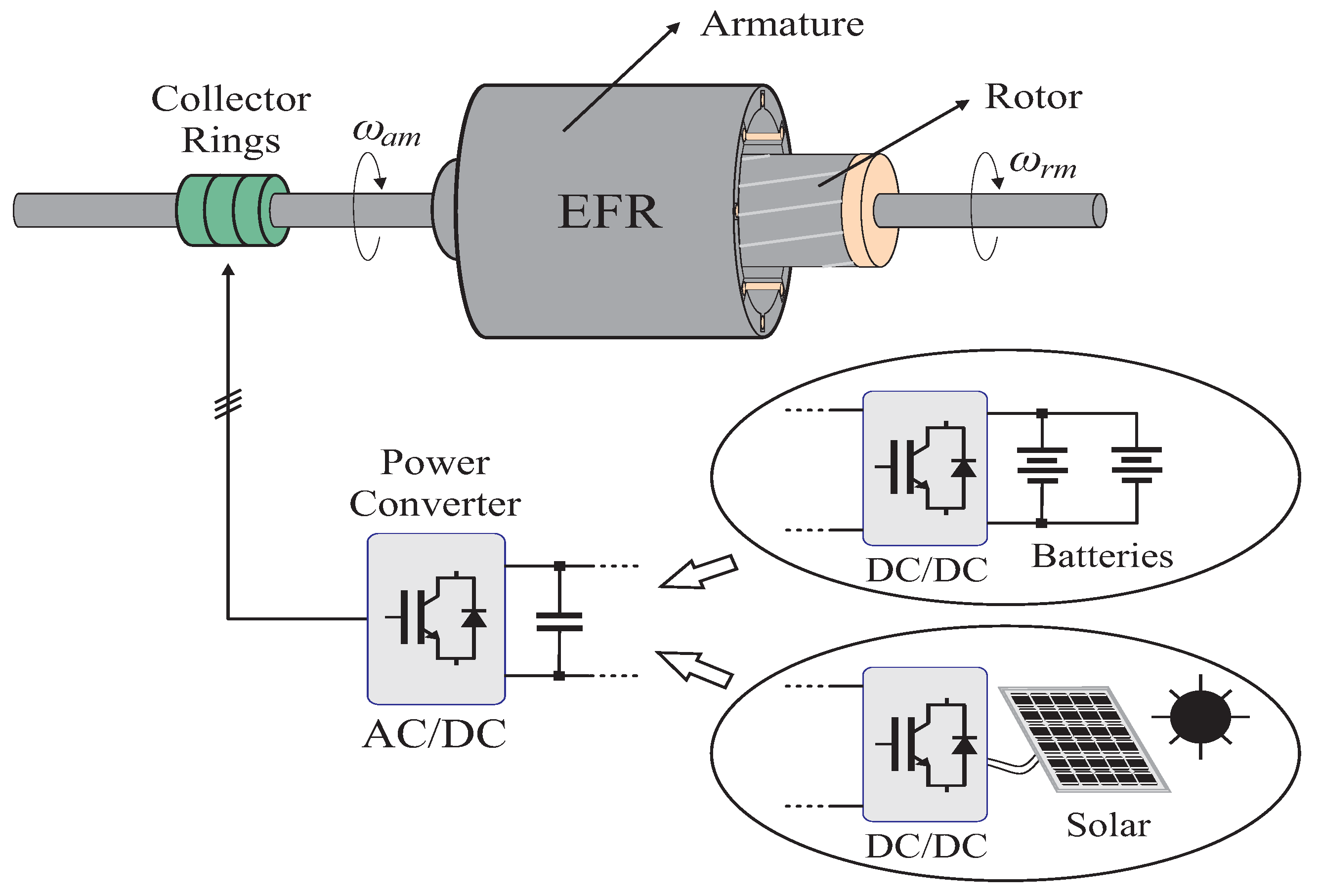
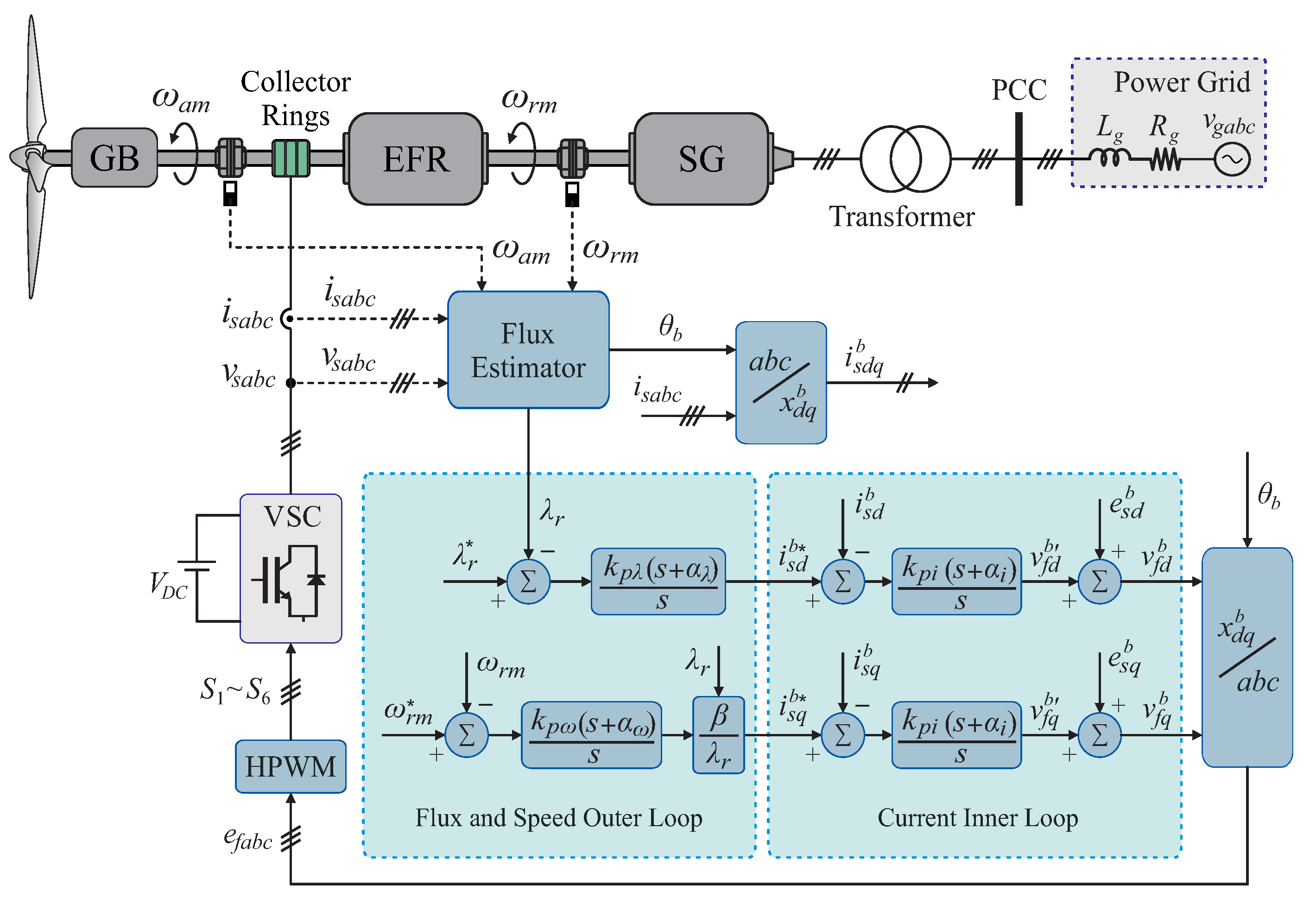
2. System Description and Control Strategy
3. EFR Slip and Dynamic Modeling
3.1. EFR Slip
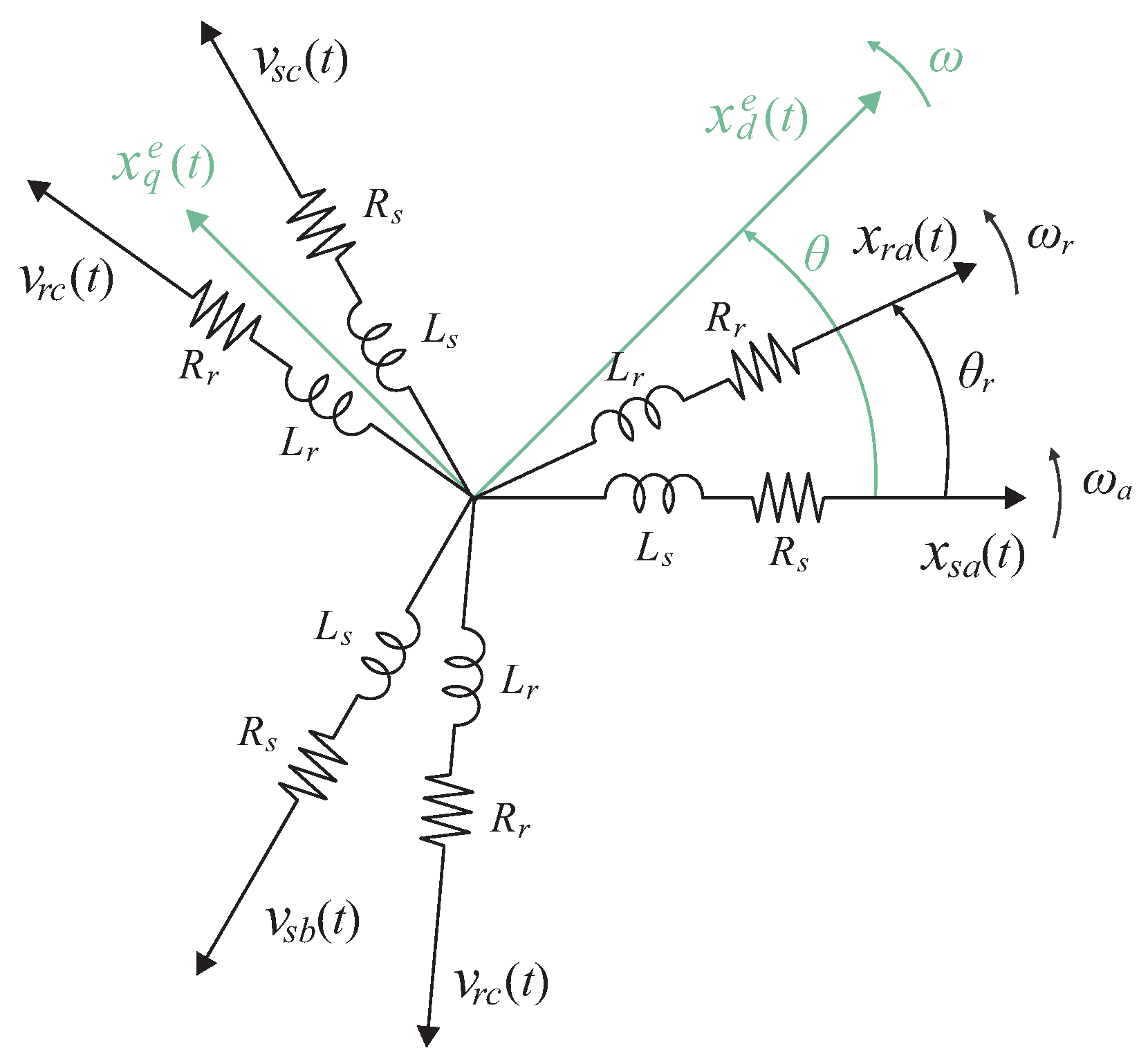
3.2. EFR Dynamic Modeling
3.2.1. Armature Current Model
3.2.2. Rotor Flux Model
3.2.3. Rotor Speed Model
4. EFR’s Dynamic Analysis
4.1. Transient Response Analysis
4.1.1. Current Transient Response
4.1.2. Flux Transient Response
4.1.3. Speed Transient Response
4.2. Steady-State Response Analysis
4.2.1. Current Steady-State Response
4.2.2. Flux and Speed Steady-State Response
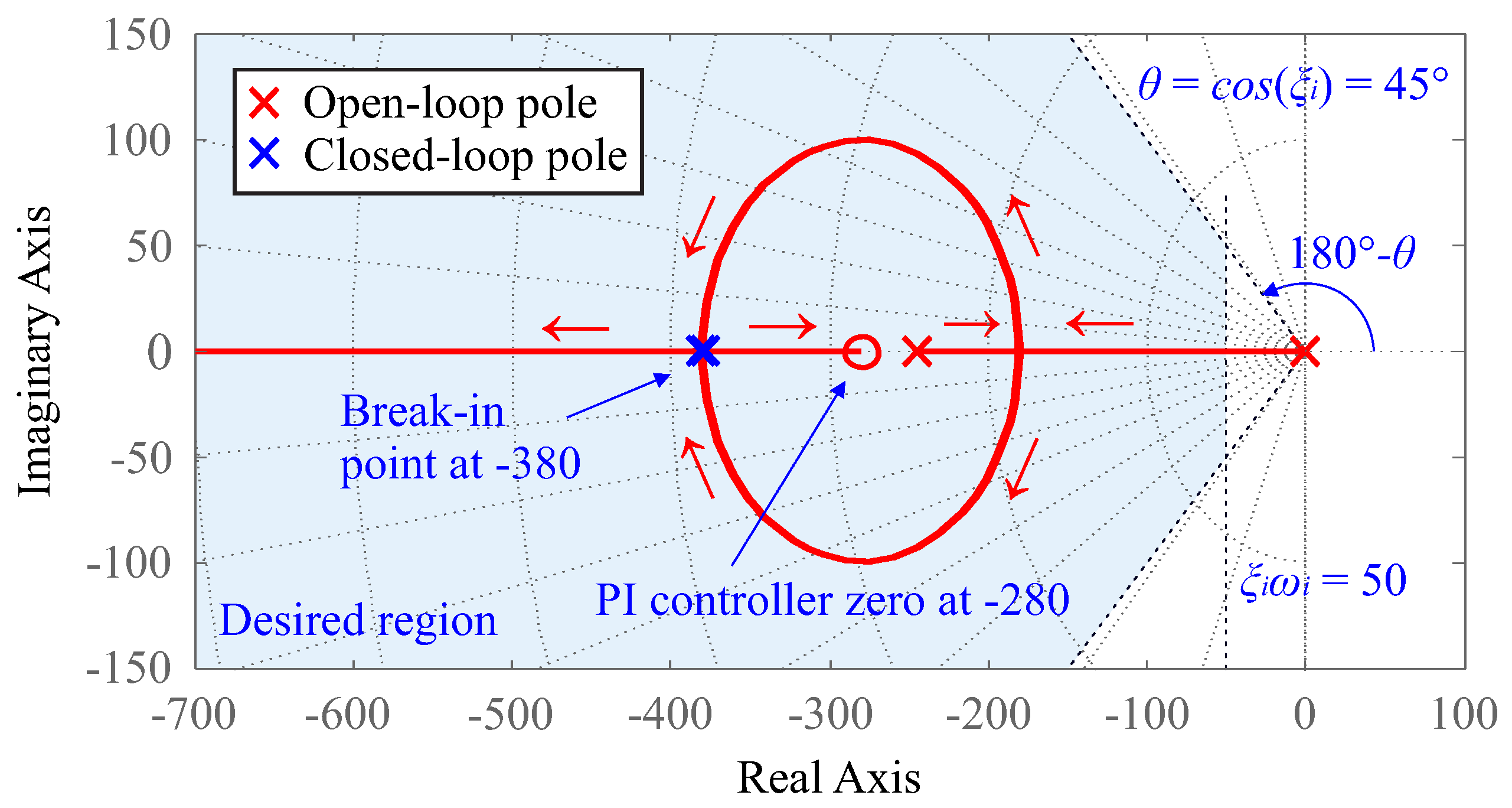
5. EFR Controller Design
5.1. Current Controller Design
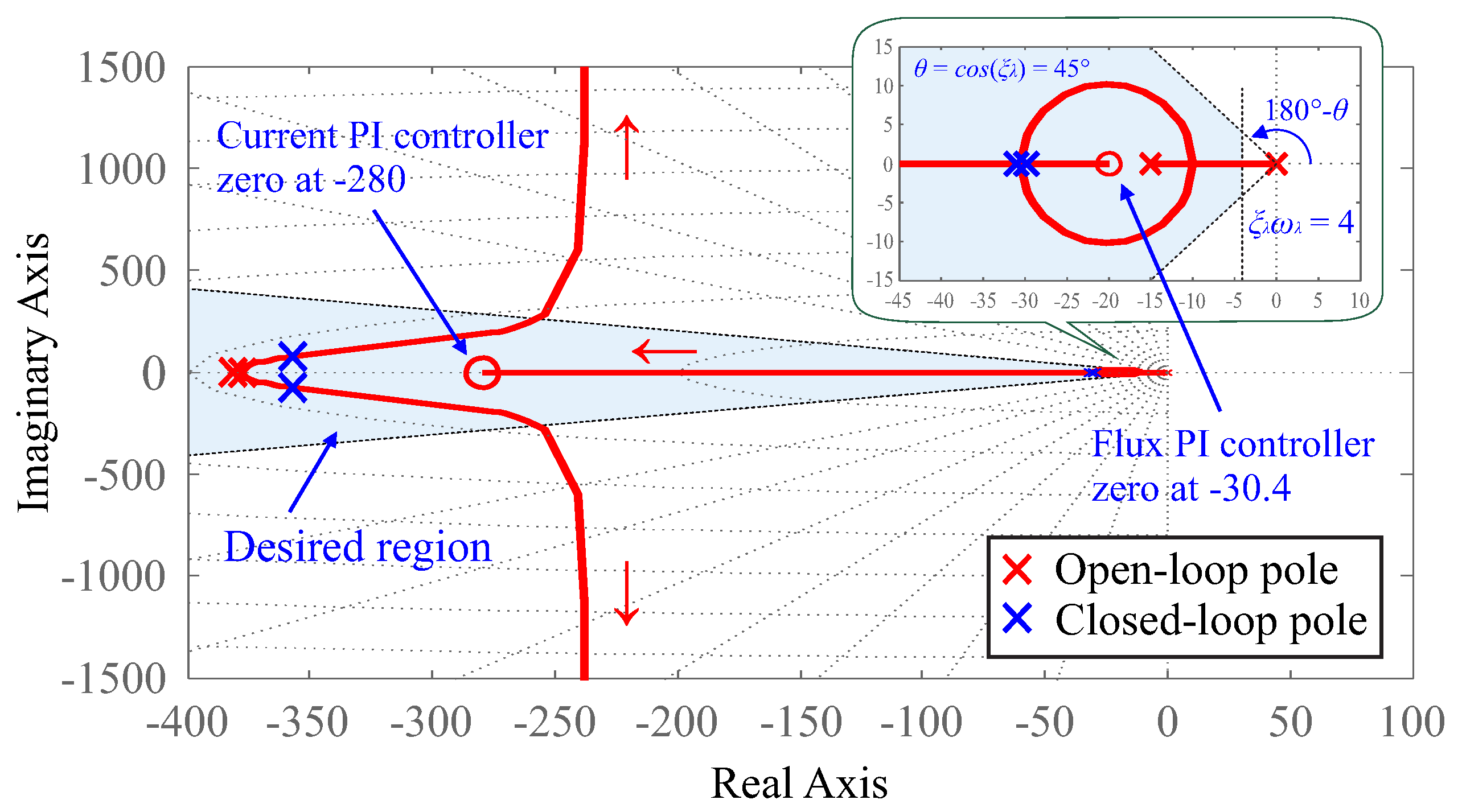
5.2. Flux Controller Design
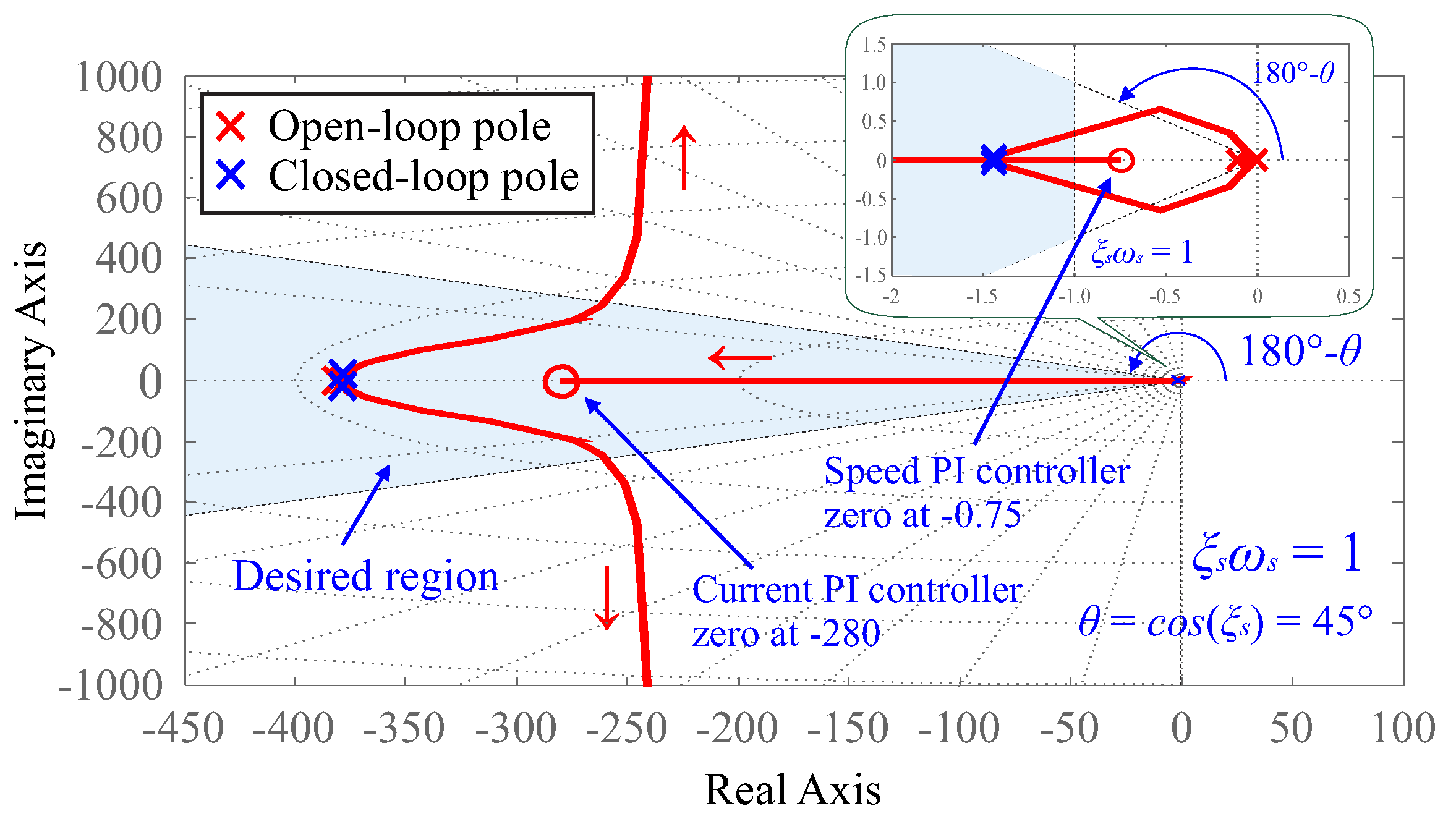
5.3. Speed Controller Design
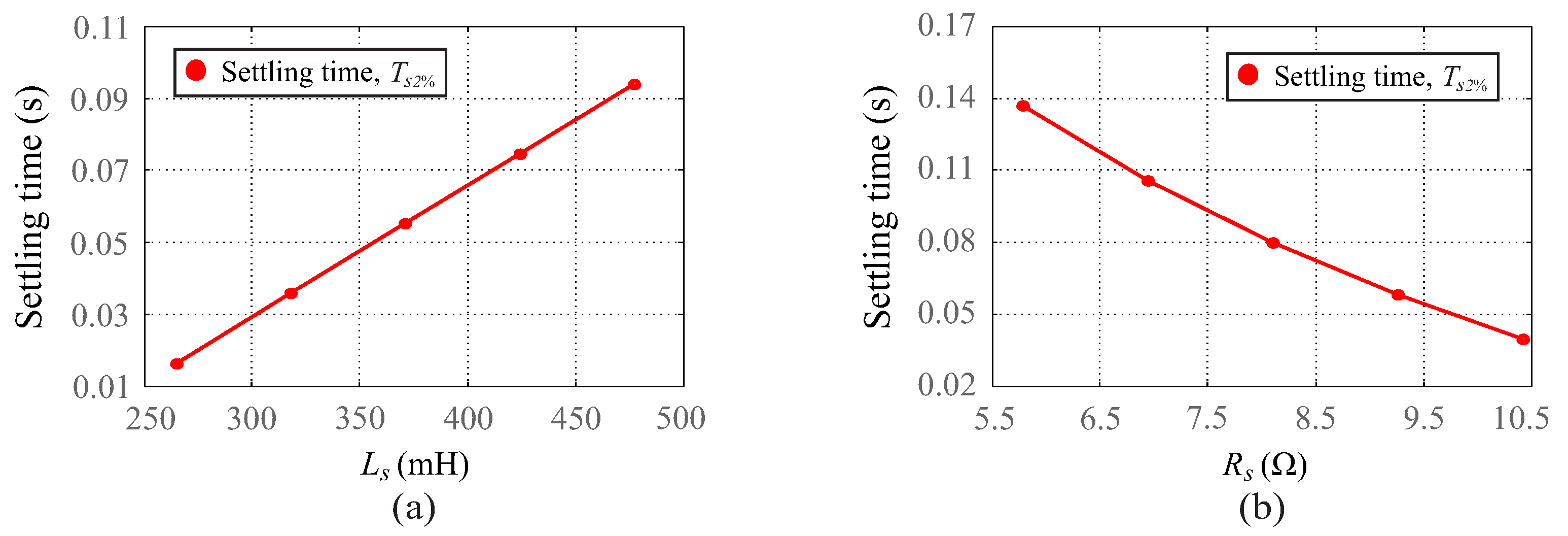
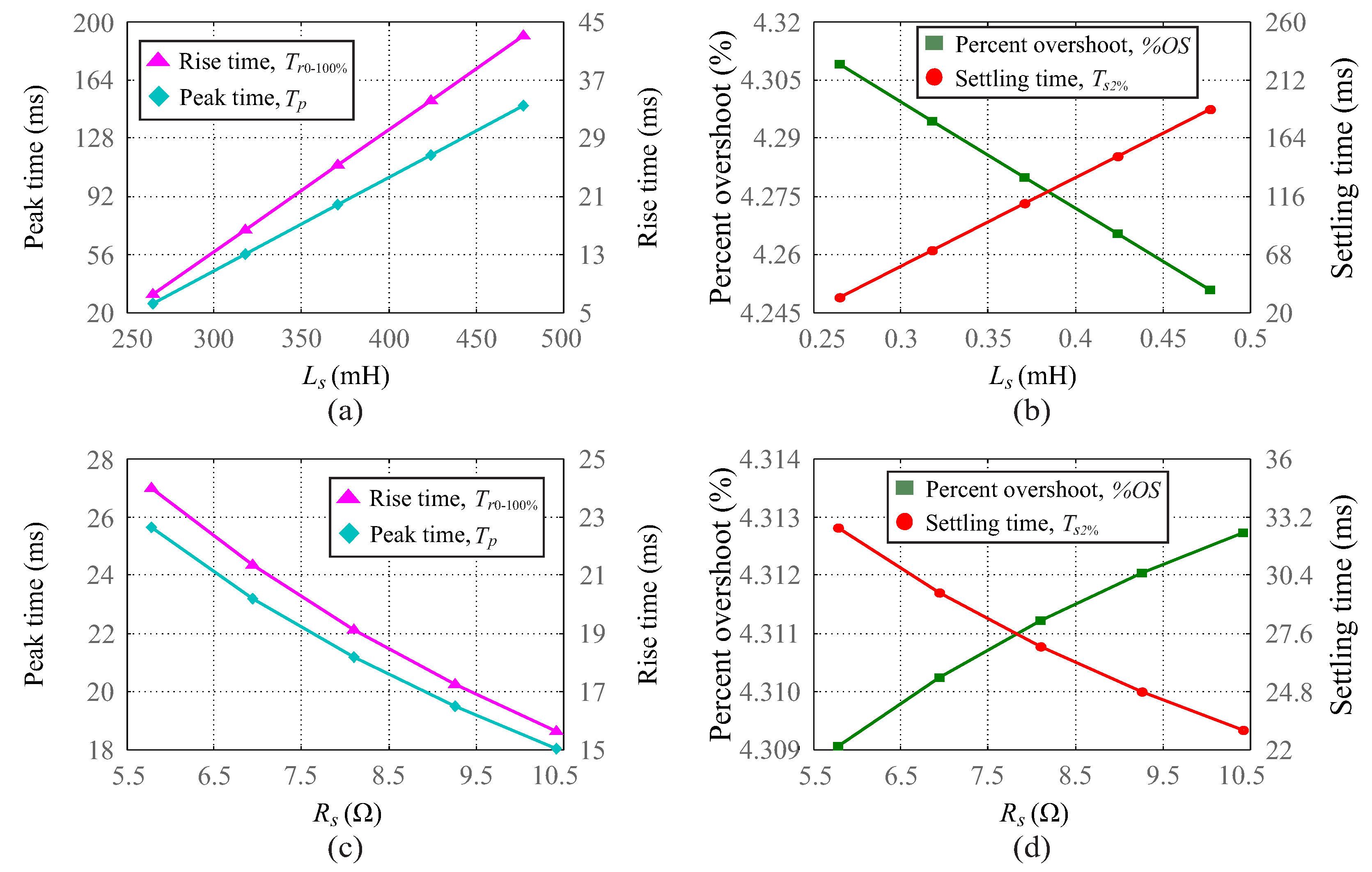
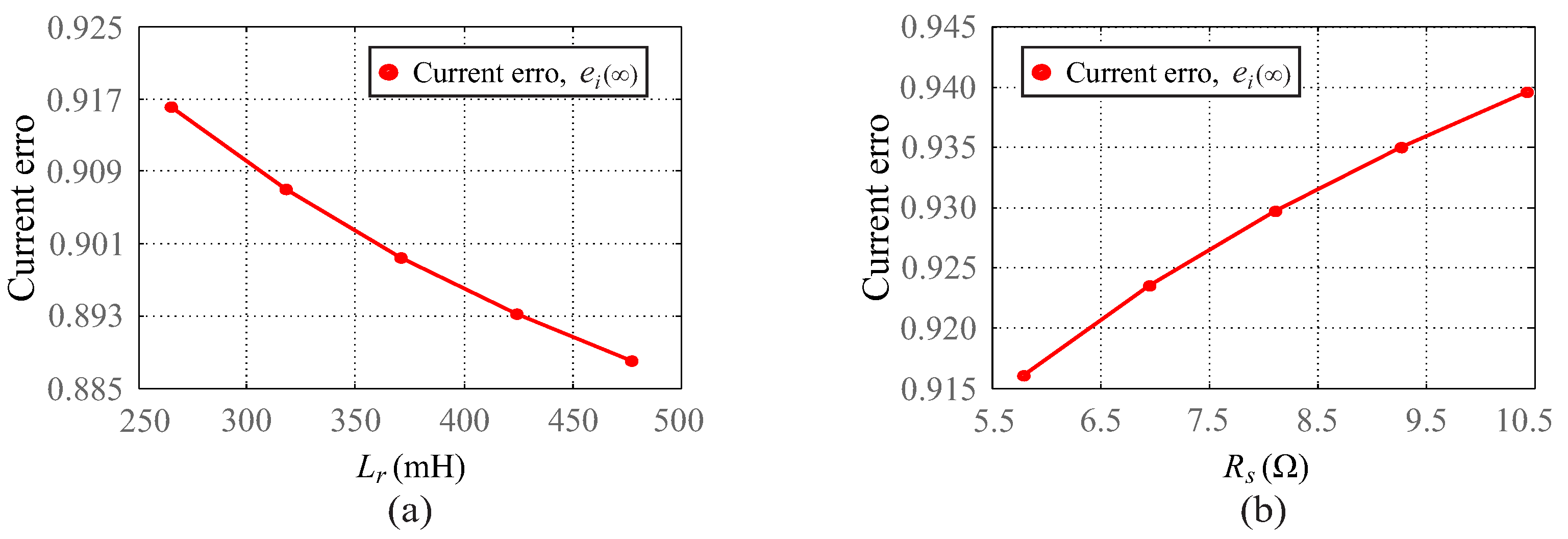
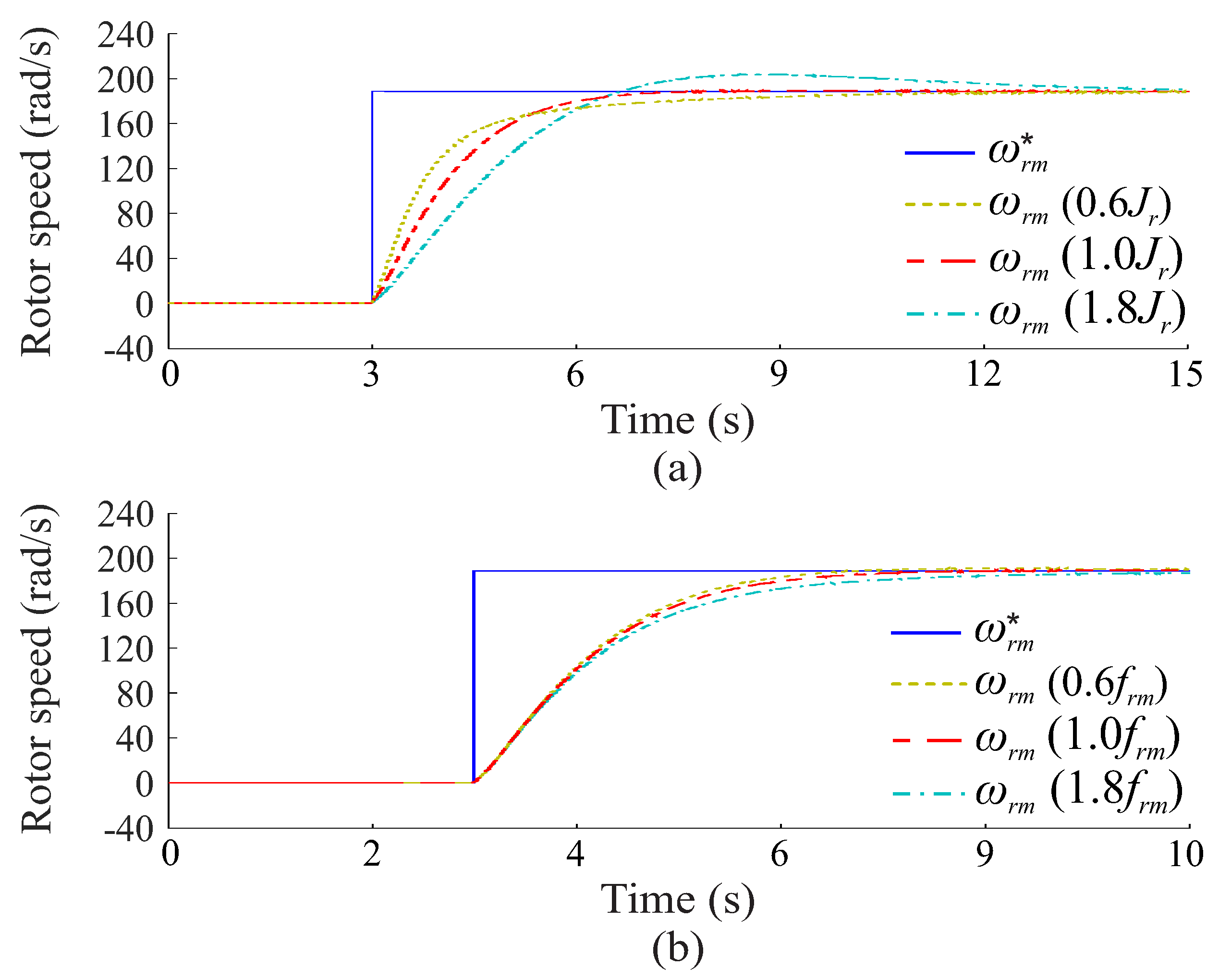
6. Closed-Loop Poles Sensitivity Analysis
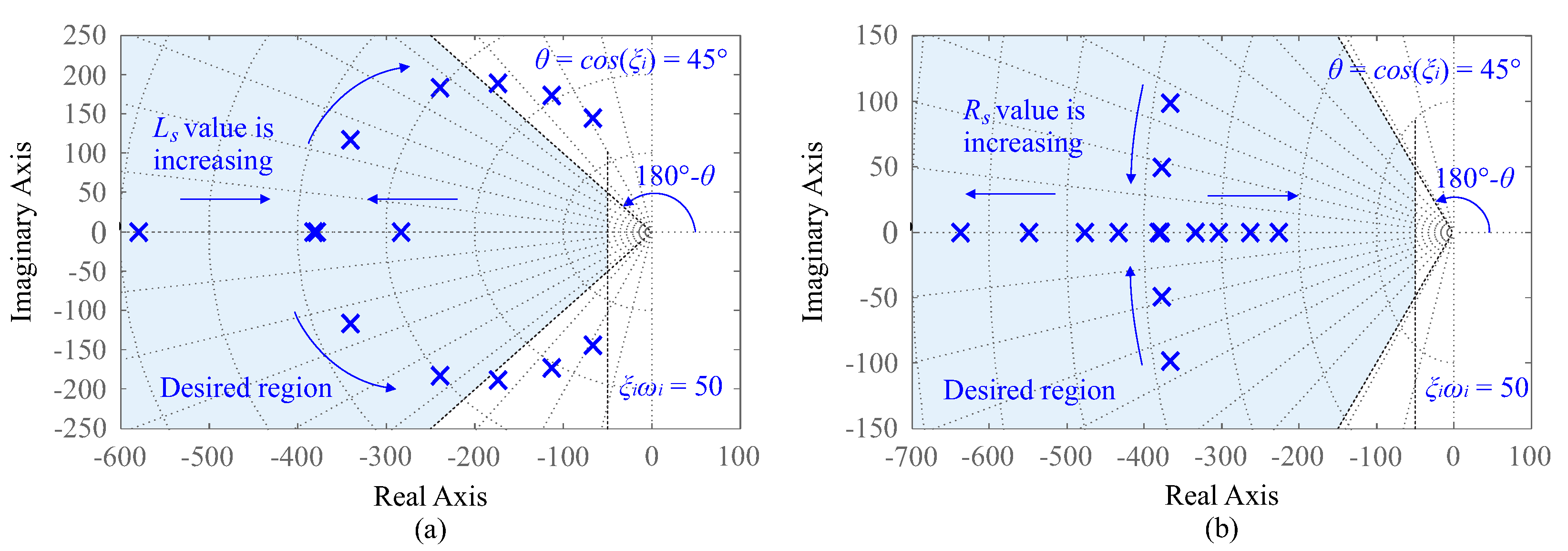
6.1. Current Inner Loop
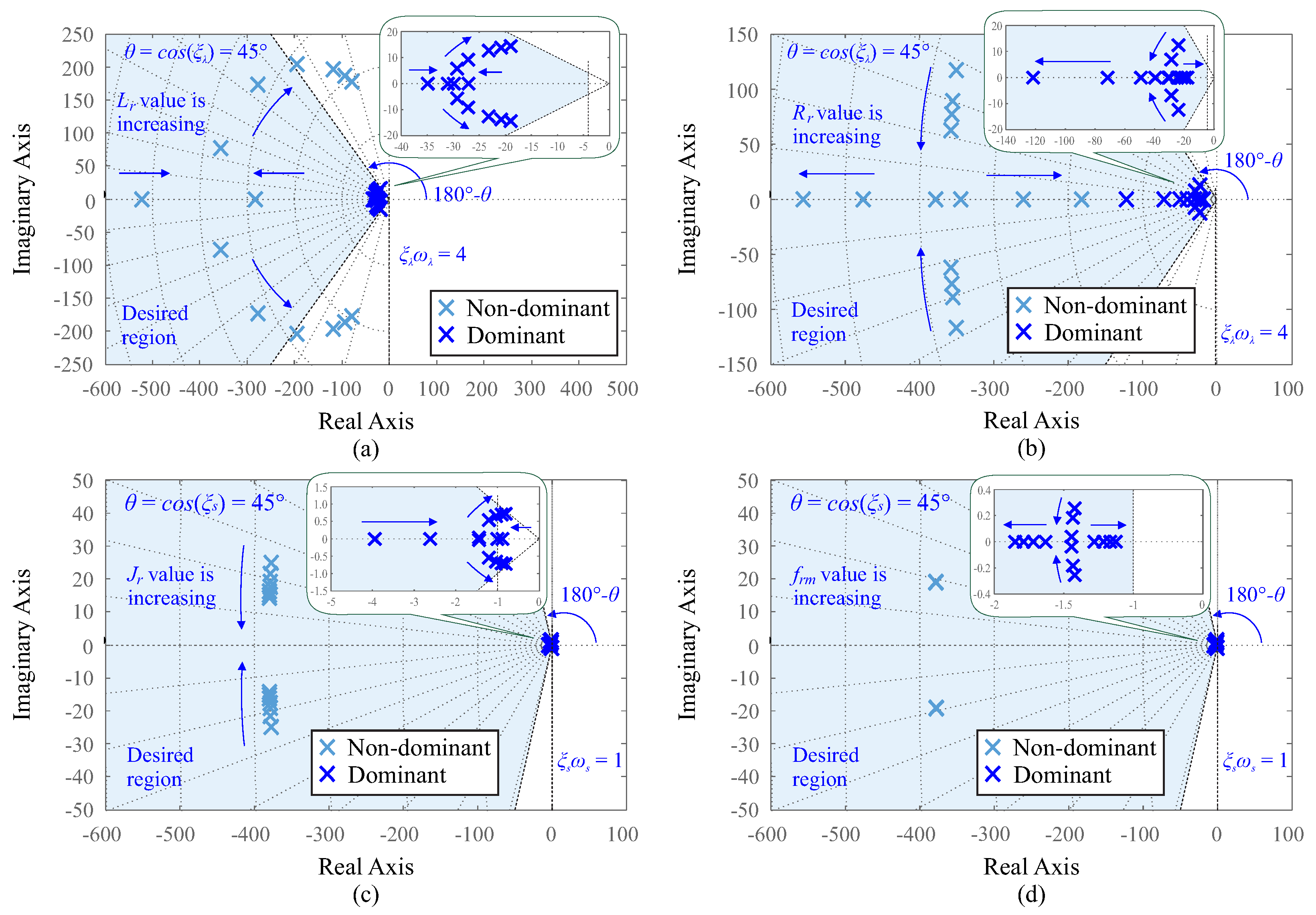
6.2. Flux and Speed Outer Loop
7. Simulation and Experimental Results
7.1. Simulation Results
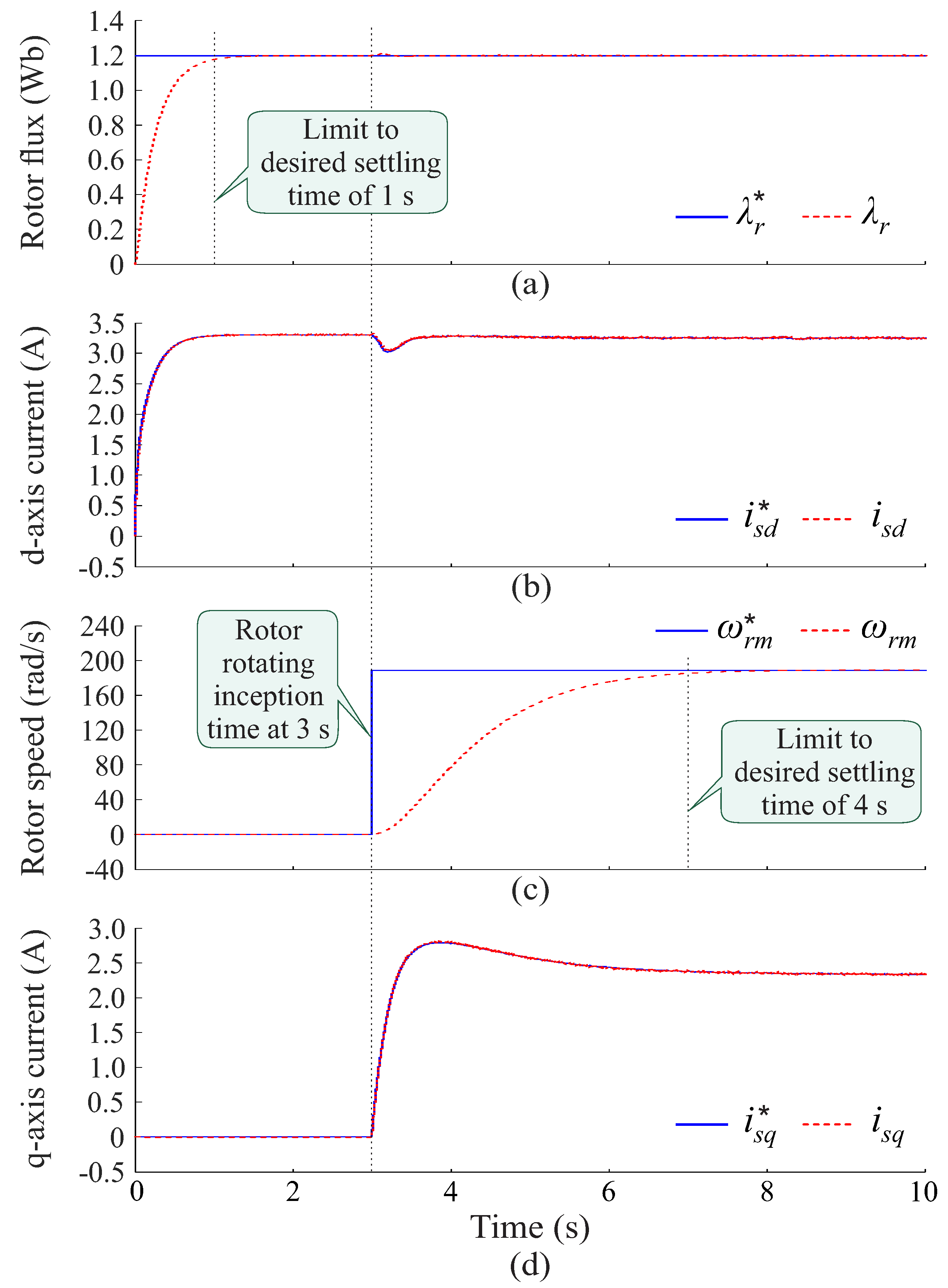
7.1.1. Performance Analysis of the EFR Controllers
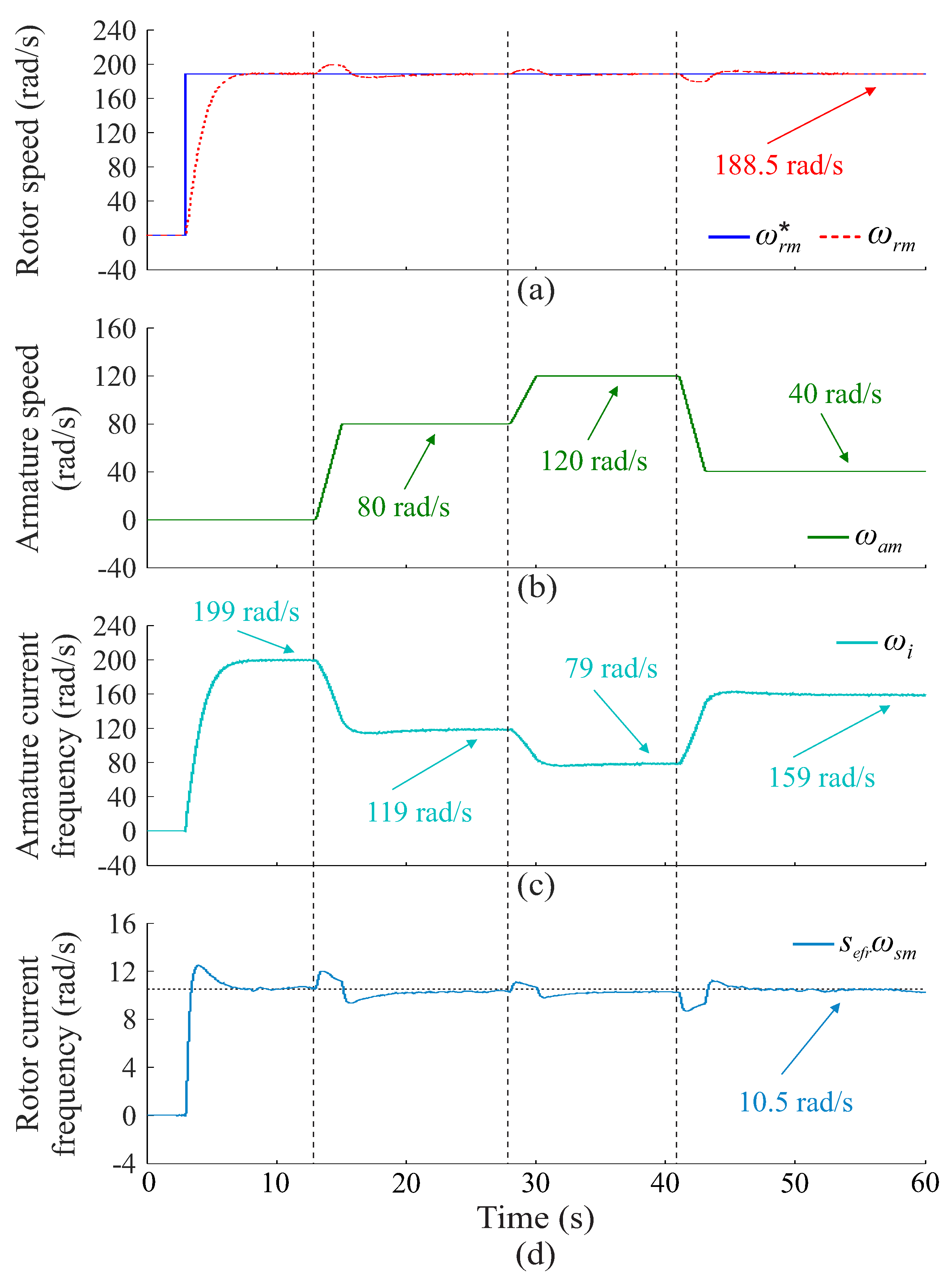
7.1.2. System Performance Analysis Assuming Variations in Armature Speed
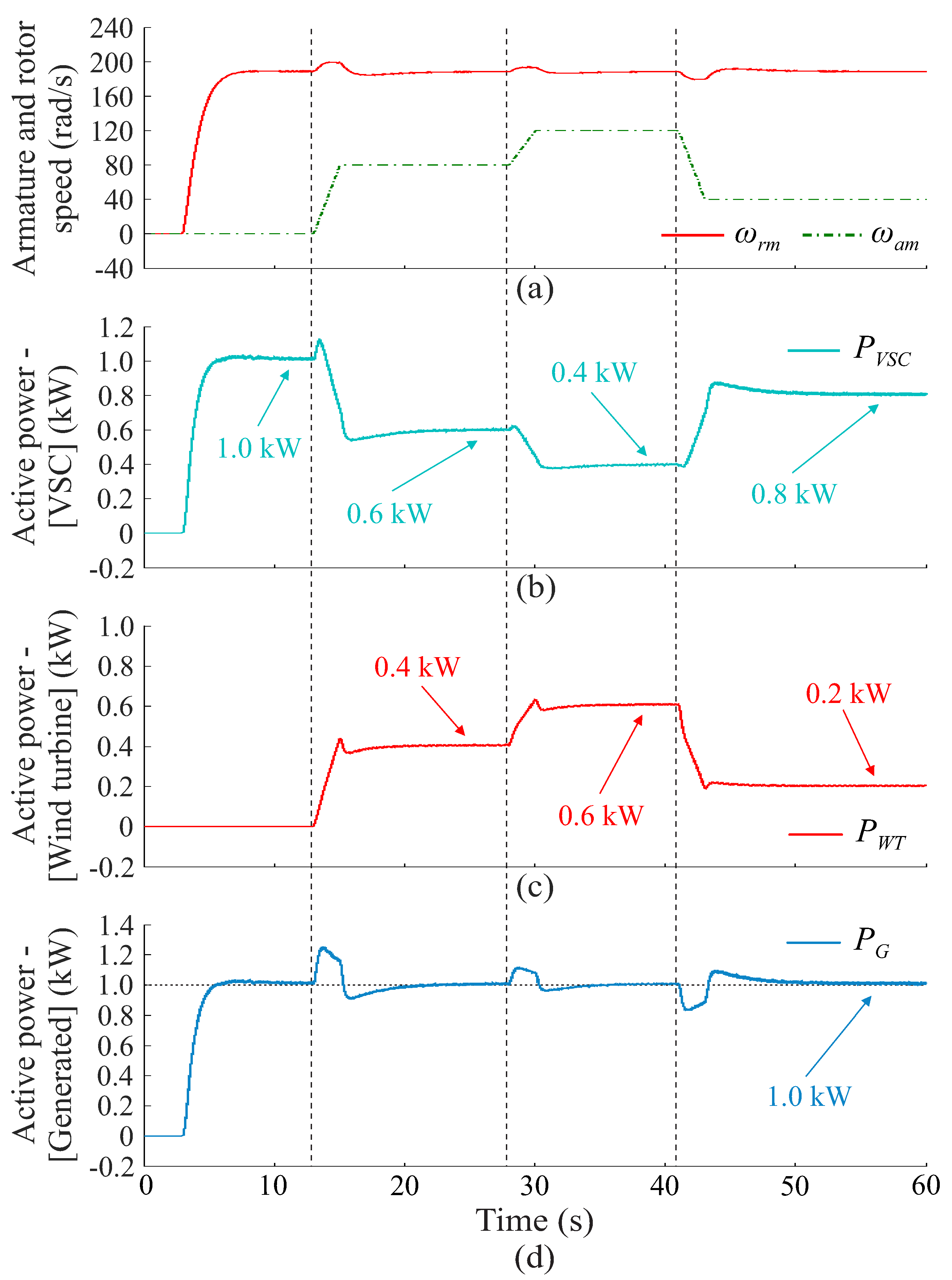
7.1.3. System Power-Sharing Analysis
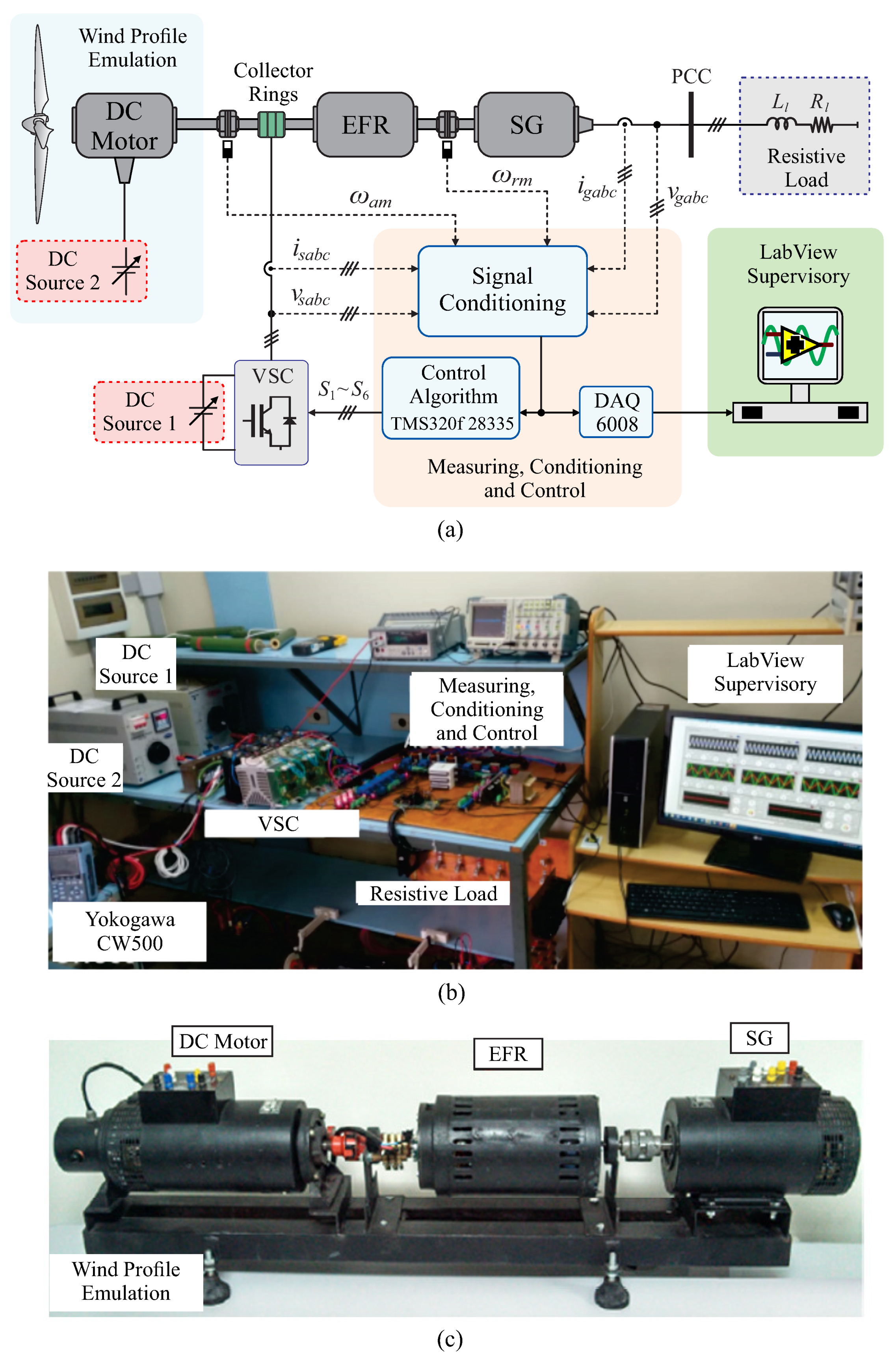
7.2. Experimental Results
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DG | Distributed Generation |
| DC | Direct Current |
| DFIG | Doubly Fed Induction Generator |
| EFR | Electromagnetic Frequency Regulator |
| GB | Gearbox |
| HPWM | Hybrid Pulse Width Modulation |
| MPPT | Maximum Power Point Tracking |
| PCC | Point of Common Coupling |
| PI | Proportional-Integral |
| PMSG | Permanent Magnetic Synchronous Generator |
| RES | Renewable Energy Sources |
| RLM | Root-locus Method |
| SG | Synchronous Generator |
| SCIG | Squirrel Cage Induction Generator |
| VSC | Voltage-Source Converter |
References
- Akella, A.K.; Saini, R.P.; Sharma, M.P. Social, economical and environmental impacts of renewable energy systems. Renew. Energy 2009, 34, 390–396. [Google Scholar] [CrossRef]
- Duan, Y.; Harley, R.G. Present and future trends in wind turbine generator designs. IEEE Power Electron. Mach. Wind Appl. 2009, 1, 1–6. [Google Scholar]
- Global Wind Energy Council. Global Wind Report 2021. 2021. Available online: https://gwec.net/global-wind-report-2021/ (accessed on 4 May 2021).
- Alhmoud, L.; Wang, B. A review of the state-of-the-art in wind-energy reliability analysis. Renew. Sustain. Energy Rev. 2018, 81, 1643–1651. [Google Scholar] [CrossRef]
- Polinder, H.; Pijl, F.F.A.V.D.; Vilder, G.D.; Tavner, P.J. Comparison of direct-drive and geared generator concepts for wind turbines. IEEE Trans. Energy Convers. 2006, 21, 725–733. [Google Scholar] [CrossRef] [Green Version]
- Herbet, G.J.; Iniyan, S.; Sreevalsan, E.; Rajapandian, S. A review of wind energy technologies. Renew. Sustain. Energy Rev. 2007, 11, 1117–1145. [Google Scholar] [CrossRef]
- Thresher, R.; Robinson, M.; Veers, P. To capture the wind. IEEE Power Energy Mag. 2007, 5, 34–46. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Sen, P.C.; Kouro, S.; Narimani, M. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Perez, J.M.P.; Marquez, F.P.G.; Tobias, A.; Papaelias, M. Wind turbine reliability analysis. Renew. Sustain. Energy Rev. 2013, 23, 463–472. [Google Scholar] [CrossRef]
- Mckenna, R.; Leye, P.O.V.D.; Fichtner, W. Key challenges and prospects for large wind turbines. Renew. Sustain. Energy Rev. 2016, 53, 1212–1221. [Google Scholar] [CrossRef]
- Vitor Silva, P.; Ferreira Pinheiro, R.; Ortiz Salazar, A.; do Santos Junior, L.P.; de Azevedo, C.C. A Proposal for a New Wind Turbine Topology Using an Electromagnetic Frequency Regulator. IEEE Lat. Am. Trans. 2015, 13, 989–997. [Google Scholar] [CrossRef]
- Silva, P.V.; Pinheiro, R.F.; Salazar, A.O.; Fernandes, J.D. Performance analysis of a new system for speed control in wind turbines. Renew. Energy Power Qual. J. 2015, 1, 455–460. [Google Scholar] [CrossRef]
- Silva, P.V.; Pinheiro, R.F.; Salazar, A.O.; Júnior, L.P.S.; Fernandes, J.D. A New System for Speed Control in Wind Turbines using the Electromagnetic Frequency Regulator. Eletrônica Potência 2015, 20, 254–262. [Google Scholar] [CrossRef] [Green Version]
- Ramos, T.; Júnior, M.M.; Pinheiro, R.; Medeiros, A. Slip Control of a Squirrel Cage Induction Generator Driven by an Electromagnetic Frequency Regulator to Achieve the Maximum Power Point Tracking. Energies 2019, 12, 2100. [Google Scholar] [CrossRef] [Green Version]
- Da Silva, J.C.L.; Ramos, T.; Júnior, M.F.M. Modeling and Harmonic Impact Mitigation of Grid-Connected SCIG Driven by an Electromagnetic Frequency Regulator. Energies 2021, 14, 4524. [Google Scholar] [CrossRef]
- Do Nascimento, T.F.; Nunes, E.A.F.; Salazar, A.O. Modeling and Controllers Design for an Electromagnetic Frequency Regulator Applied to Wind Systems. In Proceedings of the 2021 Brazilian Power Electronics Conference (COBEP), João Pessoa, Brazil, 7–10 November 2021; pp. 1–8. [Google Scholar]
- Blasko, V. Analysis of a hybrid PWM based on modified space-vector and triangle-comparison methods. IEEE Trans. Ind. Appl. 1997, 33, 756–764. [Google Scholar] [CrossRef]
- De Doncker, R.W.; Novotny, D.W. The universal field oriented controller. IEEE Trans. Ind. Appl. 1994, 30, 92–100. [Google Scholar] [CrossRef]
- Jacobina, C.B.; Lima, A.M.N. Estratégias de Controle Para Sistemas de Acionamento Com Máquina Assíncrona. SBA Controle Automação 1996, 7, 15–28. [Google Scholar]
- Nise, N.S. Control Systems Engineering, 6th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011. [Google Scholar]
- Li, Y.W. Control and Resonance Damping of Voltage-Source and Current-Source Converters with LC Filters. IEEE Trans. Ind. Electron. 2009, 56, 1511–1521. [Google Scholar]
- Kim, K.; Van, T.L.; Lee, D.; Song, S.; Kim, E. Maximum Output Power Tracking Control in Variable-Speed Wind Turbine Systems Considering Rotor Inertial Power. IEEE Trans. Ind. Electron. 2013, 60, 3207–3217. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| EFR device | Poles number () | 2 |
| Armature inductance () | 242 mH | |
| Rotor inductance () | 242 mH | |
| Armature resistance () | ||
| Rotor resistance () | ||
| Armature mutual inductance () | 121 mH | |
| Rotor mutual inductance () | 121 mH | |
| Armature-to-rotor inductance () | 265 mH | |
| Rotor inertia moment () | kg·m2 | |
| Rotor friction factor () | N·m/rad·s−1 |
| Parameter | Value | |
|---|---|---|
| Current Controller | Proportional gain () | |
| Gain () | 280 | |
| Flux Controller | Proportional gain () | |
| Gain () | 20 | |
| Speed Controller | Proportional gain () | |
| Gain () |
| Parameter | Value | |
|---|---|---|
| Wind Turbine | Rated power | kW |
| Blade radius | 2 m | |
| Rated wind speed | 8 m/s | |
| Air density | kg·m3 | |
| Power coefficient | ||
| Inertia moment () | kg·m2 | |
| Friction factor () | N·m/rad·s−1 | |
| EFR and SG | Rated power | kW |
| SG Poles number | 4 | |
| Rated voltage | 380 | |
| Rated frequency | rad/s | |
| VSC | DC-Link voltage () | 900 V |
| Switching frequency () | 10 kHz |
| Simulation | Experimental | ||
|---|---|---|---|
| Design Criteria | Values Obtained | Values Obtained | |
| Speed Controller | Settling time s | s | 4 s |
| Percent overshoot % | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
do Nascimento, T.F.; Nunes, E.A.D.F.; Villarreal, E.R.L.; Pinheiro, R.F.; Salazar, A.O. Performance Analysis of an Electromagnetic Frequency Regulator under Parametric Variations for Wind System Applications. Energies 2022, 15, 2873. https://doi.org/10.3390/en15082873
do Nascimento TF, Nunes EADF, Villarreal ERL, Pinheiro RF, Salazar AO. Performance Analysis of an Electromagnetic Frequency Regulator under Parametric Variations for Wind System Applications. Energies. 2022; 15(8):2873. https://doi.org/10.3390/en15082873
Chicago/Turabian Styledo Nascimento, Thiago F., Evandro A. D. F. Nunes, Elmer R. L. Villarreal, Ricardo F. Pinheiro, and Andrés O. Salazar. 2022. "Performance Analysis of an Electromagnetic Frequency Regulator under Parametric Variations for Wind System Applications" Energies 15, no. 8: 2873. https://doi.org/10.3390/en15082873
APA Styledo Nascimento, T. F., Nunes, E. A. D. F., Villarreal, E. R. L., Pinheiro, R. F., & Salazar, A. O. (2022). Performance Analysis of an Electromagnetic Frequency Regulator under Parametric Variations for Wind System Applications. Energies, 15(8), 2873. https://doi.org/10.3390/en15082873