1. Introduction
High voltage direct current (HVDC) is more cost-effective than high voltage alternating current (HVAC) for transmitting power over long distances, and therefore is ideal for bulk power transfer from wind, solar, hydroelectric, and tidal power plants located in offshore or in remote locations to load centers [
1]. The use of voltage-sourced converters (VSCs) in HVDC transmission systems offers greater flexibility when compared to their counterpart, line commutated converters (LCCs), due to their smaller footprint, improved power quality, as well as decoupled active and reactive power control, voltage support, and black start capabilities [
2]. The most recent advancements in VSC technology have led to the emergence of a new converter topology known as the modular multilevel converter (MMC) [
3]. The simplest and most economical MMC cell structure is the half-bridge submodule (HBSM), which is unable to prevent AC side contribution to DC side faults in HVDC systems. Therefore, DC fault protection in the HB-MMC requires either installation of expensive DC circuit breakers (DCCBs) [
4] or the opening of AC side breakers that are not adequately fast [
5]. Adding two extra switches to the HBSM results in the full-bridge submodule (FBSM) configuration, which ensures that, in the event of a DC side fault, there is a reverse voltage in the path of the AC side current feeding the DC side fault through the antiparallel diodes in the SM switches [
6]. Furthermore, instead of blocking the fault current, certain fault-tolerant SMs may also be utilized as wave-shaping circuits to control the AC currents during the fault and provide reactive power support to the grid, thereby enabling the MMC to work as a static synchronous compensator (STATCOM) [
7].
A DC side fault event in MMC-HVDC systems can be divided into two stages [
8]. In the first stage, the MMC can generate the AC side voltages and therefore the AC side currents remain controlled. As a result, the fault current in the first stage consists mainly of a DC component due to the discharge of the SM capacitors. There is also another DC component in the fault current due to the discharge of the transmission line distributed capacitance. However, the line capacitance and therefore its contribution to the fault current is negligible compared to that of the MMC capacitors [
9]. The main consequence of the discharge of SM capacitors is that the MMC can no longer generate the AC side voltages and starts to lose control of the AC side currents. Therefore, in the second stage, the AC side starts contributing to the fault; thus, there will be an AC component in the fault current in addition to the DC component. Since the capacitors are the main source of the DC fault current during the initial stage, manipulation of the SM capacitor discharge rate would be an effective means of limiting the DC fault current, especially in HB-MMC systems that are incapable of blocking or riding through DC faults.
A few methods involving SM capacitor discharge control in HB-MMC systems, to achieve fault current control, have been proposed in the literature. One approach is to block the IGBTs and prevent SM discharge completely. Such an action would eliminate the SM capacitor contribution to the fault, but the diode freewheeling effect in HBSMs means the DC fault current, even though reduced, would not be completely suppressed [
8]. A significant disadvantage of the blocking action is that it would cause overvoltage across the arm inductors [
10]. Another approach is to bypass the SMs entirely by using either the SM IGBTs [
11] or double thyristor switches connected in parallel with the SMs [
12]. The purpose of installing thyristors in parallel to the SMs is to protect the IGBTs from sustained high levels of fault current; thyristors typically have much higher current ratings than IGBTs. However, this bypassing action would transform the DC side short circuit into an AC short circuit and will lead to an overcurrent on the AC side and in the MMC arms. Such deficiencies in both blocking and bypass approaches have necessitated the development of new methods [
13,
14] that can provide a degree of control over the SM capacitor discharge rate.
As mentioned earlier, some SMs are capable of either blocking the DC fault current or riding through the DC fault while the MMC is operated as a STATCOM. Fault blocking SMs that are unipolar [
15,
16] are usually capable of only the former function while bipolar SMs [
17,
18] can achieve both functionalities [
19]. Even though the blocking action realized by fault-tolerant SMs to facilitate fault current suppression can be achieved very quickly (usually within a few milliseconds) [
20], it would prevent the converter from working as a STATCOM and provide voltage support at the point of common coupling (PCC). Meanwhile, bipolar SMs such as the FBSM are capable of clearing DC faults and simultaneously allowing the MMC to operate as a STATCOM to provide reactive power support [
7] to the AC side. However, it can take tens of milliseconds for the fault current to decay to zero after clearance of the DC fault and initiation of the STATCOM mode, due to the slow damping of the fault current by the DC transmission line [
21]. A damping method based on utilizing an active resistance to absorb the inductive energy and accelerate DC fault current suppression was briefly discussed by the authors of [
21]. However, no details on the active resistance calculation method were provided. In [
22], a novel SM capacitor energy balancing strategy was proposed that has the added advantage of reduced oscillations in the fault current during DC side faults. However, the proposed strategy is complex to implement. A DC FRT strategy with independent pole control is proposed in [
23]. However, the strategy is only meant for utilization during pole-to-ground faults. No other notable techniques to decrease oscillations and enable faster DC fault current suppression were found in the literature. To summarize, the existing literature focuses on (i) DC FRT capability of fault-tolerant MMC topologies while working as STATCOMs to provide reactive power support to the grid, and (ii) fault blocking schemes for fault-tolerant MMC topologies that enable fast suppression of DC fault currents. The main shortcoming associated with the first approach is the relatively slow fault current interruption, while the drawback of the second approach lies in its inability to provide reactive power support to the grid leading to voltage instability. This paper attempts to address the gap in research on fast DC fault current suppression techniques during STATCOM operation of MMCs by introducing a new control scheme that can be utilized in fault-tolerant MMC configurations to ride-through DC faults and provide voltage support to the AC grid.
The proposed control scheme of this paper is inspired by [
14,
24], but in contrast to that of [
14,
24], it facilitates fast DC fault current suppression and enables the provision of reactive power to the AC grid during DC side faults. In [
14,
24], the authors focused on the manipulation of DC fault current rate of rise by controlled SM capacitor discharge in HB-MMC systems. The purpose was to reduce the rate of rise of the DC fault current such that the size of the DC line reactors could be decreased, leading to lower costs. Since reduced SM capacitor discharge would by no means facilitate DC fault current suppression, such a method would not be useful in MMC-HVDC systems comprising fault-tolerant SMs capable of either blocking the DC fault current or riding through the DC faults while operating as STATCOMs. The purpose of this paper is to modify the fault current limiting technique of [
14], which is only applicable to HB-MMC systems, in a way that it could be implemented in fault-tolerant MMCs to enhance DC-FRT performance. To achieve this goal, a state-space averaging approach that can be utilized in bipolar SM-based MMC systems is developed. Theoretical underpinnings of the proposed control method are presented and simulation results confirming its superior performance in riding through DC faults and suppressing fault current oscillations, compared to the conventional operation of fault-tolerant MMCs as STATCOMs, are provided.
2. MMC Structure and Control
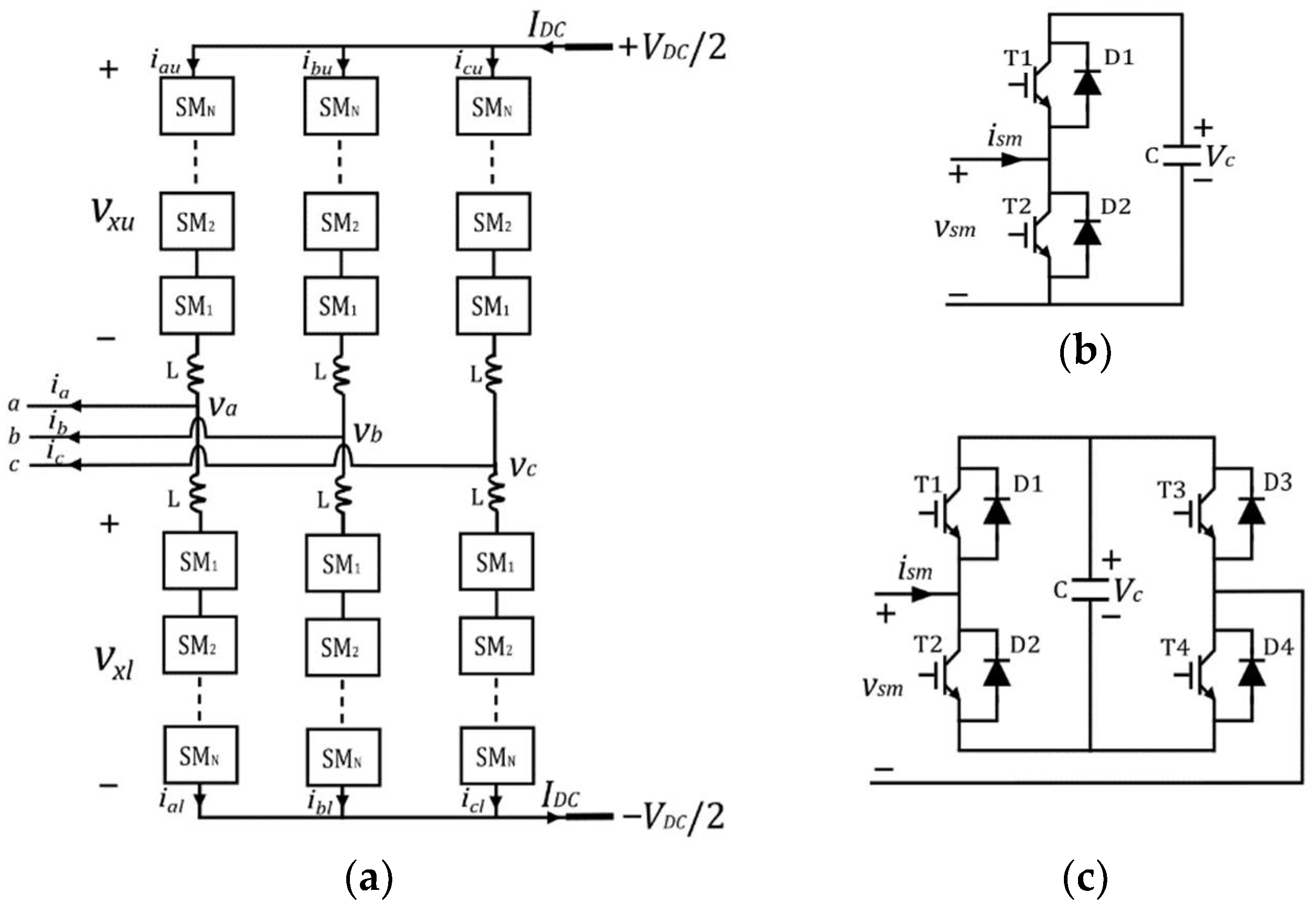
The generic structure of a three-phase MMC is shown in
Figure 1a. Each arm of the converter comprises
N series-connected SMs along with an inductor. The phase
x terminal voltage,
(
x ∈
a,
b,
c) in
Figure 1a, may be expressed in either one of the following ways,
where
and
denote the total upper and lower arm SM voltages, and
and
are the upper and lower arm currents in each phase. The arm currents (
and
) in each phase of the MMC, shown in
Figure 1a, can be expressed as a combination of the AC output current
and a common-mode current
, i.e.,
where the common-mode current represents a combination of the DC bus current (
) and AC circulating current components. The DC part of the common-mode current is responsible for active power flow through the converter while the AC part, which is a negative sequence current, causes power loss in the converter and needs to be suppressed [
25]. Traditional vector control methods [
26] are commonly implemented in MMC-HVDC systems. Various modulation methods, such as the nearest level modulation [
27] and high-frequency carrier-based sinusoidal pulse width modulation techniques [
28] can be employed for the generation of the AC side waveforms. Since SMs contain capacitors, voltage balancing [
29] and sorting algorithms [
30] are also implemented to keep the capacitor voltages close to their nominal values.
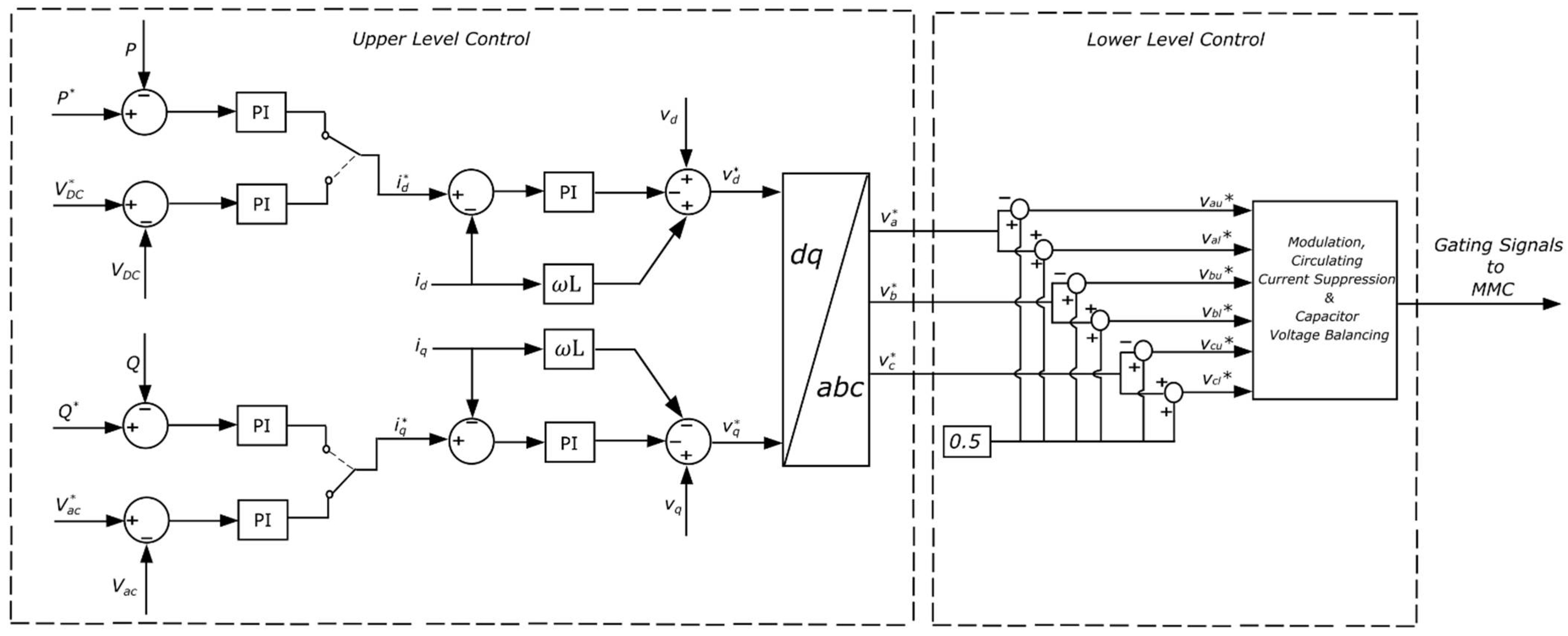
The control can be divided into upper- and lower-level controls. The upper-level controls (based on the traditional vector control methods) are further divided into two parts: outer control and inner decoupled current control. The outer controller consists of two control loops, both using proportional-integral (PI) control blocks. One loop controls either the active power (
P) or the DC side voltage (
), while the other loop controls the reactive power (
Q) or AC side voltage (
). These outer controllers generate
d- and
q-axis current references for the inner current control blocks, as shown in
Figure 2. In the inner decoupled current controller,
d- and
q-axis current values (
,
) measured from the AC grid are regulated against their references (
,
) obtained from the outer controller by employing PI control. This generates the references for the
d- and
q-axis components of the AC voltage (
,
), which are then transformed to
abc reference frame components (
). These voltages are then fed into the lower-level control system.
The lower-level control is responsible for modulation, circulating current suppression, and SM capacitor voltage balancing. Common modulation schemes include phase-shifted pulse width modulation [
31], phase-disposition pulse width modulation [
32], and nearest level control [
33]. The primary component in the circulating current is of negative sequence at twice the fundamental frequency [
34]. In [
35], a controller is presented that can be utilized to suppress the circulating current primary component.
Continuous insertion and bypassing of SM capacitors inevitably leads to fluctuation in individual SM capacitor voltages [
36]. The sorting algorithm described in [
30] sorts the SM capacitor voltages in the order of magnitude. Then, depending on the arm current direction and the number of SMs to be inserted in the arm (determined in the modulation stage), SMs with the lowest (highest) voltage magnitudes are selected to be in the current path to be charged (discharged). Due to its simplicity, this method has gained widespread recognition.
The HBSM structure, depicted in
Figure 1b, is capable of generating two voltage levels of 0 and
. In contrast, FBSM, shown in
Figure 1c, can generate three voltage levels: 0,
and
. Hence, the FBSM is a bipolar SM that can generate negative voltage states not only during DC fault blocking but also during regular operation, which is an essential feature when DC FRT capability is required in the converter.
While the blocking action by fault blocking modules suppresses the fault current very quickly, it would prevent the converter from operating as a STATCOM to provide voltage support at the PCC. Bipolar SMs, such as the FBSM, are capable of riding through DC faults, allowing the MMC to operate as a STATCOM and providing reactive power support. However, operation as a STATCOM requires modifications to the balancing approach employed in the arms and legs of the MMC [
7]. Moreover, it can take several milliseconds for the fault current to decay to zero after the DC fault has been cleared through adjustments to the MMC arm voltage references. This is due to the low damping characteristics of the DC transmission line [
21]. To facilitate fast DC fault current suppression, an approach based on the regulation of SM capacitor discharge is presented in the following sections.
3. Submodule Capacitor Discharge Control & DC Fault Clearance
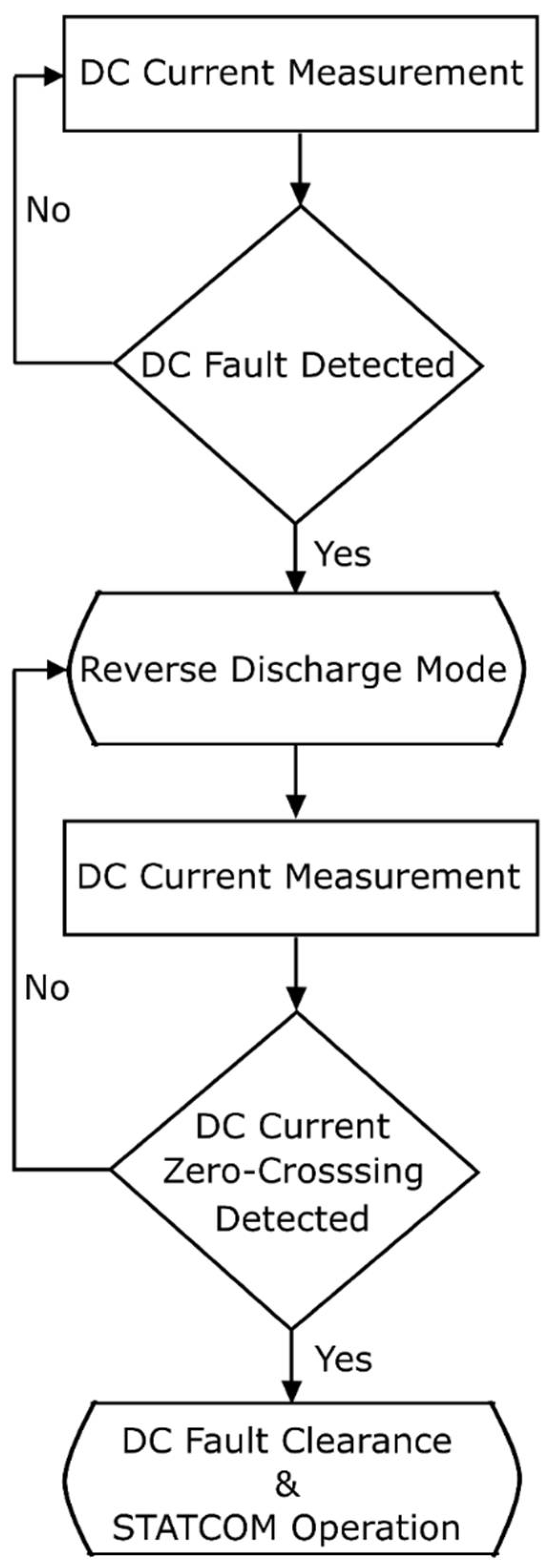
Each MMC arm inserts a certain proportion of N capacitors during each switching period. When a DC side fault occurs, before it is detected, the SM capacitors will discharge whenever they are inserted into the current path, leading to a rapid rise in the DC fault current. In an FB-MMC system, the two extra switches in the FBSM would allow the SM capacitors to be inserted in either polarity into the current path. Capacitor discharge would occur regardless of the insertion polarity, but the difference will be in the direction of the discharge current. If the extra switches in an FBSM are utilized to reverse the polarity of capacitor insertion immediately after DC fault detection, then this should result in a reversal of the direction of flow of fault current as well. Such a change in the direction of the DC fault current will inevitably result in a zero-crossing. The DC fault clearance and STATCOM operation of the MMC(s) can be initiated after detection of the zero-crossing, resulting in quick suppression of the fault current. The control method proposed in this paper is based on this specific idea.
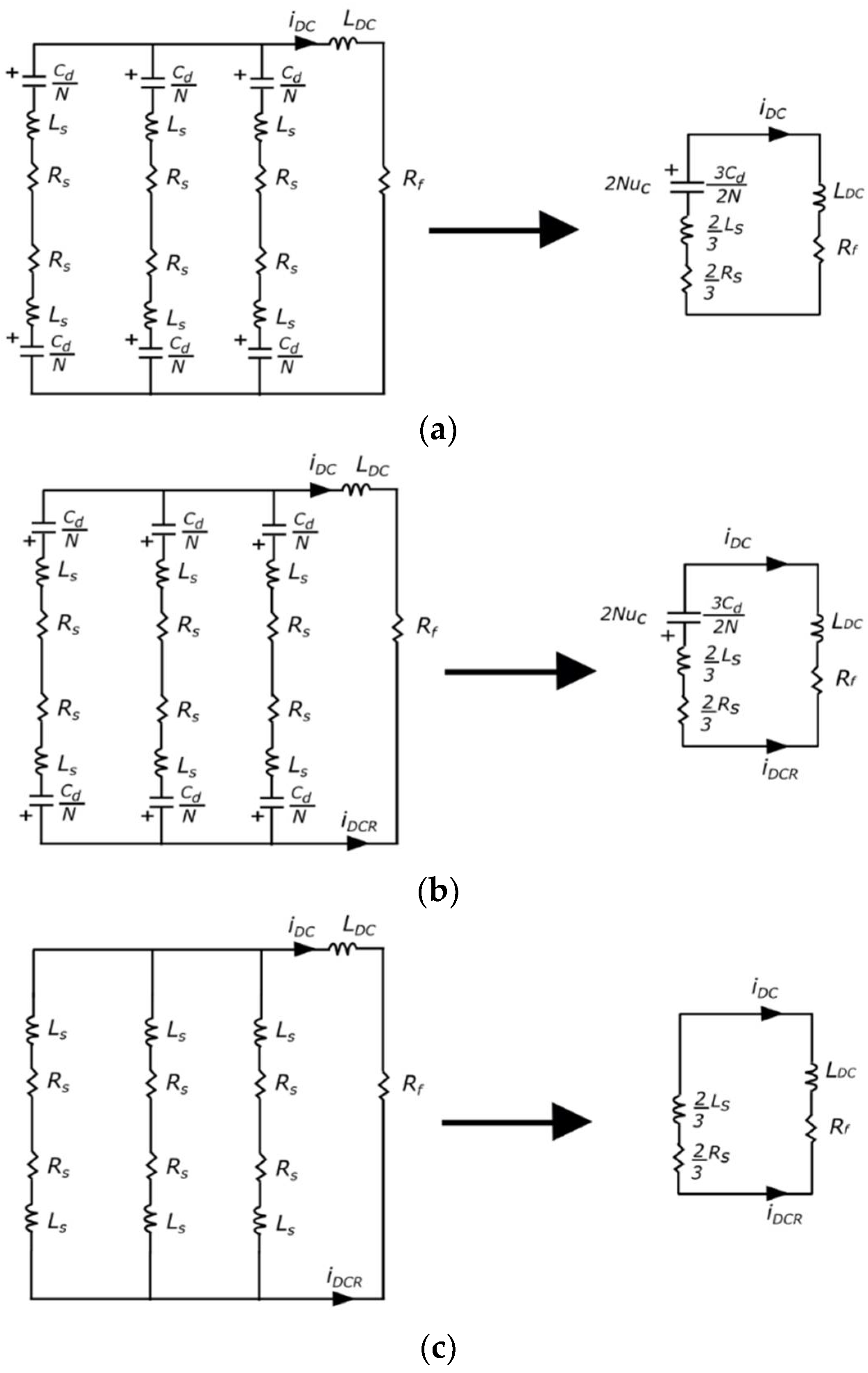
Three independent base circuits, as depicted in
Figure 3 can be used to represent the insertion/bypass states of the FB-MMC. Base circuit 1 represents the case when all SM capacitors are inserted in the circuit in the conventional direction, while base circuit 2 portrays the opposite scenario, i.e., when all SM capacitors are inserted in the reverse direction. Base circuit 3 represents the bypass state of the SMs. A variable
can be defined to denote the duty cycle for base circuit 1 during each switching period,
Ts, while
represents the duty cycle for circuit 2. Either (
) or (
) is then the duty cycle for base circuit 3 depending on whether the SMs are being inserted in the conventional or the reverse direction. The capacitor insertions occur in only one specific direction within a switching cycle. Therefore, SM insertions can be accurately represented by utilizing either base circuits 1 and 3 or 2 and 3. It is not necessary to combine base circuits 1,2 and 3 to represent the state of discharge of the SM capacitors.
The variable
represents the state of discharge of the SM capacitors in the conventional direction. Therefore, establishing control over the variable
would enable direct control over SM capacitor discharge, and thus the DC fault current. Since
is an insertion parameter, it can be expressed by the ratio of the sum of the upper and lower arm voltages in a phase divided by the total generation capacity of the two MMC arms,
Neglecting the voltage drop across the arm inductors, the arm voltage expressions in phase
x are given by,
In the expression for , the AC terms in the arm voltages would cancel each other out during normal operation, implying that the value of will be equal to 0.5 in this case. Thus, is the normalized DC component of the arm voltage reference. Since is 0.5 during normal operation, controlled capacitor discharge, and subsequent fault current limiting action will be performed when it is varied between 0 and 0.5.
Likewise, the variable
represents the state of discharge of the SM capacitors and is also an insertion parameter described by the same equation as used for
, i.e.,
However, during reverse capacitor insertion, the arm voltage references given by (6) and (7) need to be modified as:
Once again, the AC terms cancel each other, and the nominal value of is −0.5. However, the MMC is never operated in this mode during regular operation since it would lead to a reversal in the DC link polarities. The only possible benefit of operation in the reverse region would be to bring about a change in the DC fault current direction after the onset of a DC side fault. With that in mind, it is essential to derive expressions relating with the DC fault current.
The DC fault current
(reactor current) and the averaged SM capacitor voltage
can be chosen as state variables in the state vector
. Since the DC fault transient is short (a few milliseconds), the voltages of SM capacitors are assumed to remain balanced. Then, the individual SM capacitor voltage
can be used to represent the capacitor energy stored in the MMC. The state vector
can be expressed as:
In [
14], a relationship between
and
was derived by utilizing the state-space representation of base circuits 1 and 3. However, the focus of this paper is on reverse discharge control involving base circuits 2 and 3. The reason is that the reverse discharge control, which is specific to bipolar SMs, results in a zero-crossing. The detection of zero-crossing is used as an indicator during DC FRT to initiate fault clearance and STATCOM operation in the MMC(s), thereby enabling fast DC fault current suppression. To that end, a second variable
for the DC fault current is introduced whose direction is opposite to that of
, as shown in
Figure 3. The discharge of the capacitor, controlled by the duty cycle
would then affect
in the same manner as
influences
. Another state vector
in terms of
and
can then be defined as:
In this paper,
rather than
is selected as the state vector to maintain similarity between the two derivation processes. For a switching period denoted by
, the span of the first subinterval corresponding to base circuit 2 with all capacitors inserted in the reverse direction would be
. The length of the second subinterval with all capacitors bypassed, as depicted in base circuit 3, would then be
. Applying Kirchhoff’s voltage and current laws (KVL and KCL) in base circuit 2, the following expressions involving the state variables can be obtained,
where
is the number of SMs per arm,
is the equivalent inductance,
refers to the equivalent resistance, and
denotes the equivalent capacitance, given by (15)–(17), respectively,
Similar expressions can be derived for base circuit 3, by applying KVL and KCL, as:
The state-space expressions for base circuits 2 and 3, in matrix form, are given by (20) and (21), respectively,
To combine the two sets of state-space equations, an averaged matrix
R can be derived, based on the duty cycles of the two base circuits, as:
where,
The complete time-averaged expression can now be expressed as,
where
and
are time averages of
and
, respectively.
Differentiating the first equation in (23) with respect to time yields the second-order differential equation
From the second equation in (23),
Substituting (25) into (24) yields:
with initial conditions for the fault current and capacitor voltage at the time of DC fault occurrence given by:
Due to small values of fault resistance, the underdamped solution of (26) (
) would occur most frequently while overdamped and critically damped cases would be rare. Therefore, the focus of this paper will be SM capacitor discharge control in underdamped conditions. The test system parameters and selected duty cycle values would ensure underdamped conditions when the theoretical expectations are verified through simulation. For the underdamped case, the characteristic roots are complex conjugates:
where,
The general solution of such a differential equation is of the form:
Substituting (27) into (29) yields,
Differentiating (29) with respect to time,
From the state space representation in (23),
Equating the right-hand sides of (31) and (32) yields:
Utilizing initial conditions and substituting the expressions for
and
δ yields,
Rearranging the terms and simplifying,
Therefore, the parameters of (29) can be expressed as:
Having found the solution to the second-order differential equation for the underdamped condition, the next step would be to derive a simpler relationship between the fault current and the duty cycle. With that in mind,
is assumed to be zero, considering that the circuit resistances are very small. By extension,
δ also becomes equal to zero. Therefore,
The simplified expression for
is used to obtain the value of
by making use of Pythagoras’ Theorem as:
The initial capacitor and reactor energy can be written [
14] as:
The capacitor energy is typically much higher than the inductor energy. Hence, the expression for
can be approximated to:
Substituting the simplified form of
and
into the expression for fault current yields
Thus, an expression involving
and rate of change of DC fault current
is found as
Recalling that
is actually
,
Equation (48) indicates that the rate of fall of the DC fault current is proportional to the value of
. Similarly, a linearized expression involving
and
with
can be found as,
where,
Therefore, the rate of rise of
is given by,
Thus, similar to
, varying the value of
results in an adjustment of the rate of rise of the DC fault current. As established previously,
is the normalized DC component of the arm reference voltages. Therefore, it can be simply appended to the arm voltage references for the six arms of the MMC. To ensure symmetry when the value of
is varied after DC fault occurrence, a dynamic limiter with the range 0 to
is required. Although conventional SM discharge control is not utilized in this paper, the arm reference voltages during
control is shown in
Figure 4a to highlight the differences with respect to those during
reverse discharge control and DC fault clearance/STATCOM operation.
Equation (48) confirms that variations in the value of
can also be used to influence the rate of change of the fault current
. However, the effect will be in the reverse direction when compared to the control over the rate of change of
by variation of
in the conventional discharge control method. The arm reference voltages and the control diagram involving
are given in
Figure 4b. The arm reference DC component will be equal to 0.5 with no dynamic limiters during normal operation. During reverse discharge control,
cannot simply be added to the arm reference voltage as was the case with
. This is because the SMs will be inserted in reverse polarity and therefore the arm voltage range will need to be changed from (0,1) to (0,−1). The DC component of the arm voltage references, which is equal to 0.5 during normal operation, is first subtracted from the references, followed by the subtraction of
from the arm voltage references, yielding a combined factor of (
).
The DC side voltage needs to be synthesized as zero [
37] by the MMC arms after DC side fault detection to clear the fault and allow the MMC to operate as a STATCOM. This can be achieved by simply removing the DC component from the arm voltage references [
37,
38].
Figure 4c depicts the changes made to the arm voltage references to facilitate DC fault clearance and initiate STATCOM operation. The figure illustrates that bipolar SMs are necessary for DC-FRT in the STATCOM mode since the SMs need to be capable of following both positive and negative excursions of the arm reference voltages.
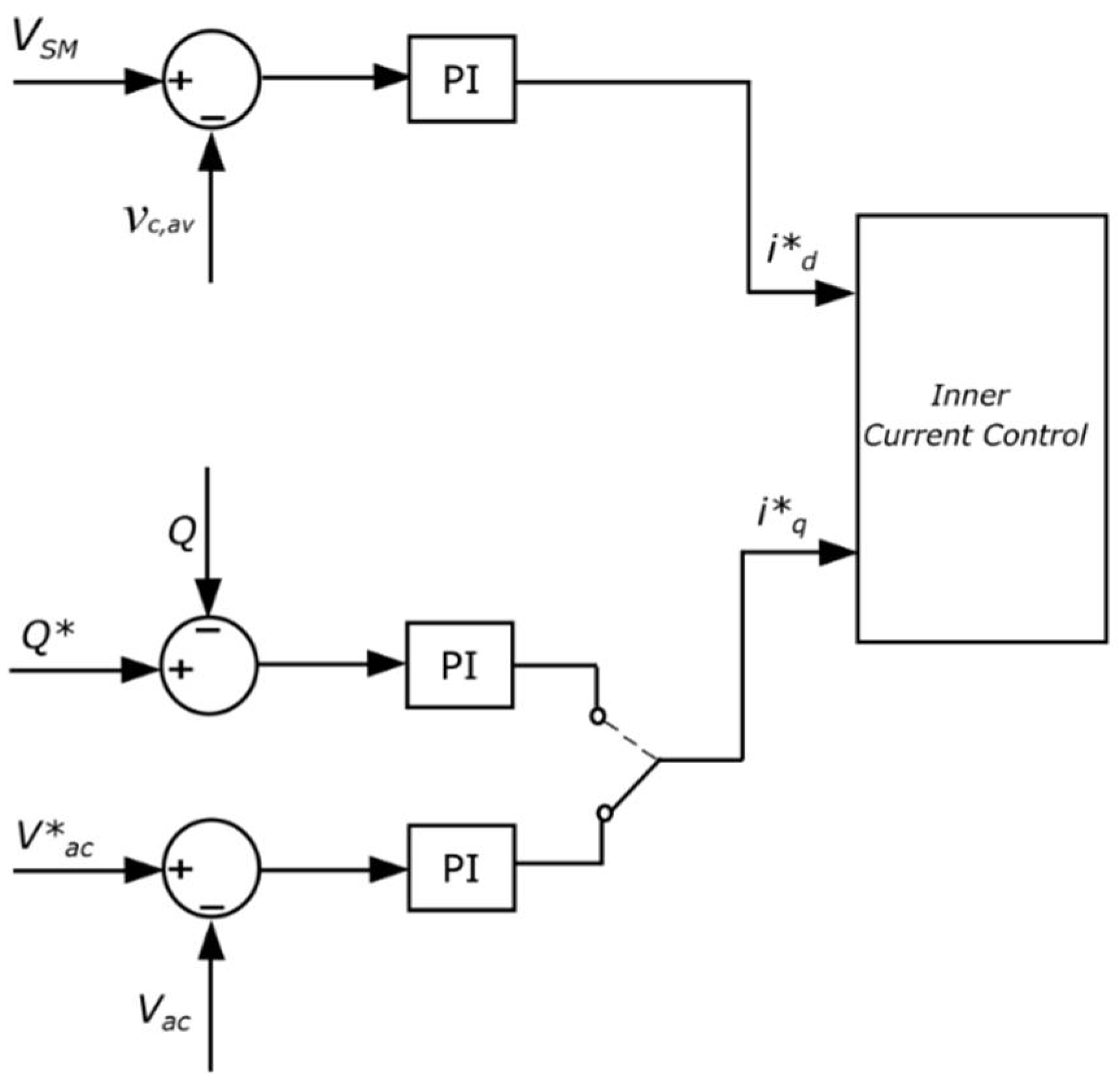
Another essential change in the MMC control to maintain energy balance when operating as a STATCOM during the fault is in the outer controllers as suggested by the authors in [
38], more specifically in the
loop that provides the reference for the
d-axis current. When a DC fault occurs, active power cannot be transferred through the DC line. Therefore, the active power reference should be set to zero. However, some active power will need to be provided to the SMs to account for the losses in the switches. Therefore, the
d-axis current reference should be provided by some other means than
. This change is illustrated in
Figure 5, where the
d-axis current reference is obtained through a PI controller involving
, the nominal SM capacitor voltage, and
, the average value of the measured capacitor voltages of all SMs in the MMC.
Such an outer loop would ensure that the average capacitor voltage, and therefore the total energy stored in the MMC capacitors, is kept reasonably constant during the fault. The conventional sorting algorithm [
30] is kept in place to ensure equal voltage distribution in all six MMC arms. The control diagram for all three modes of operation is shown in
Figure 6.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}