
Full-Order Terminal Sliding-Mode Control of Brushless Doubly Fed Induction Generator for Ship Microgrids


Abstract
:1. Introduction
2. Preliminary
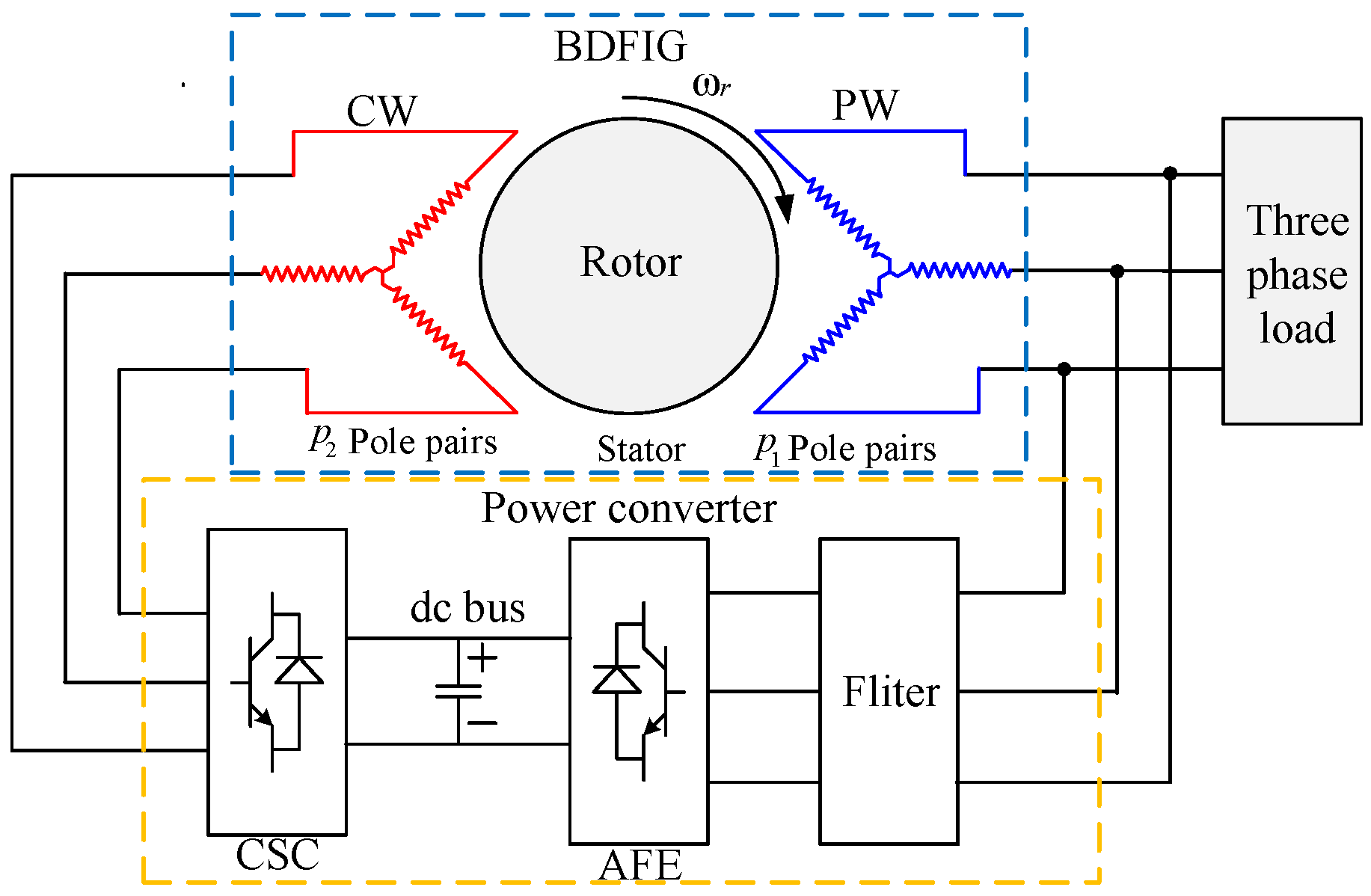
2.1. Dynamic Model of the BDFIG
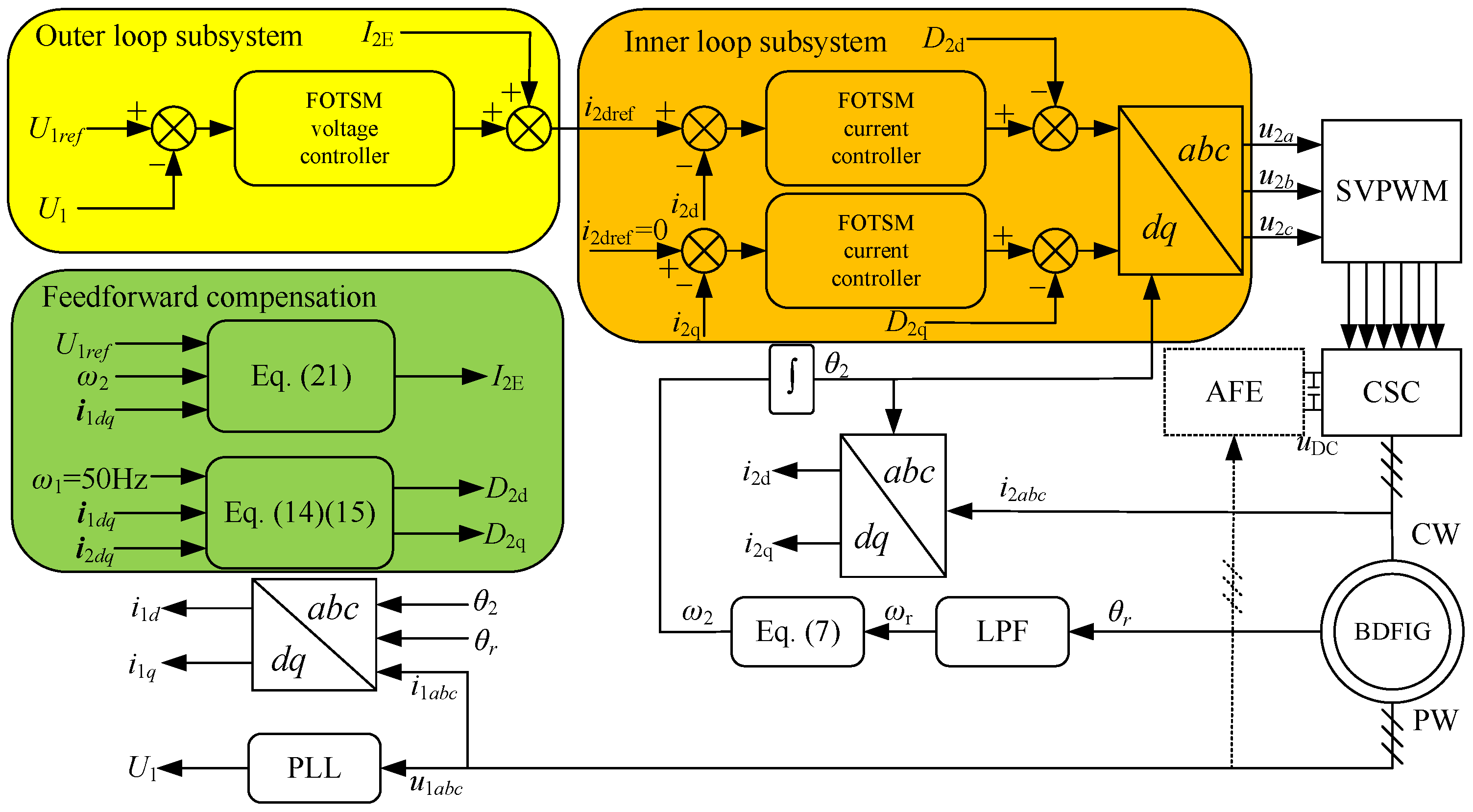
2.2. Outer Loop Subsystem
2.3. Inner Loop Subsystem
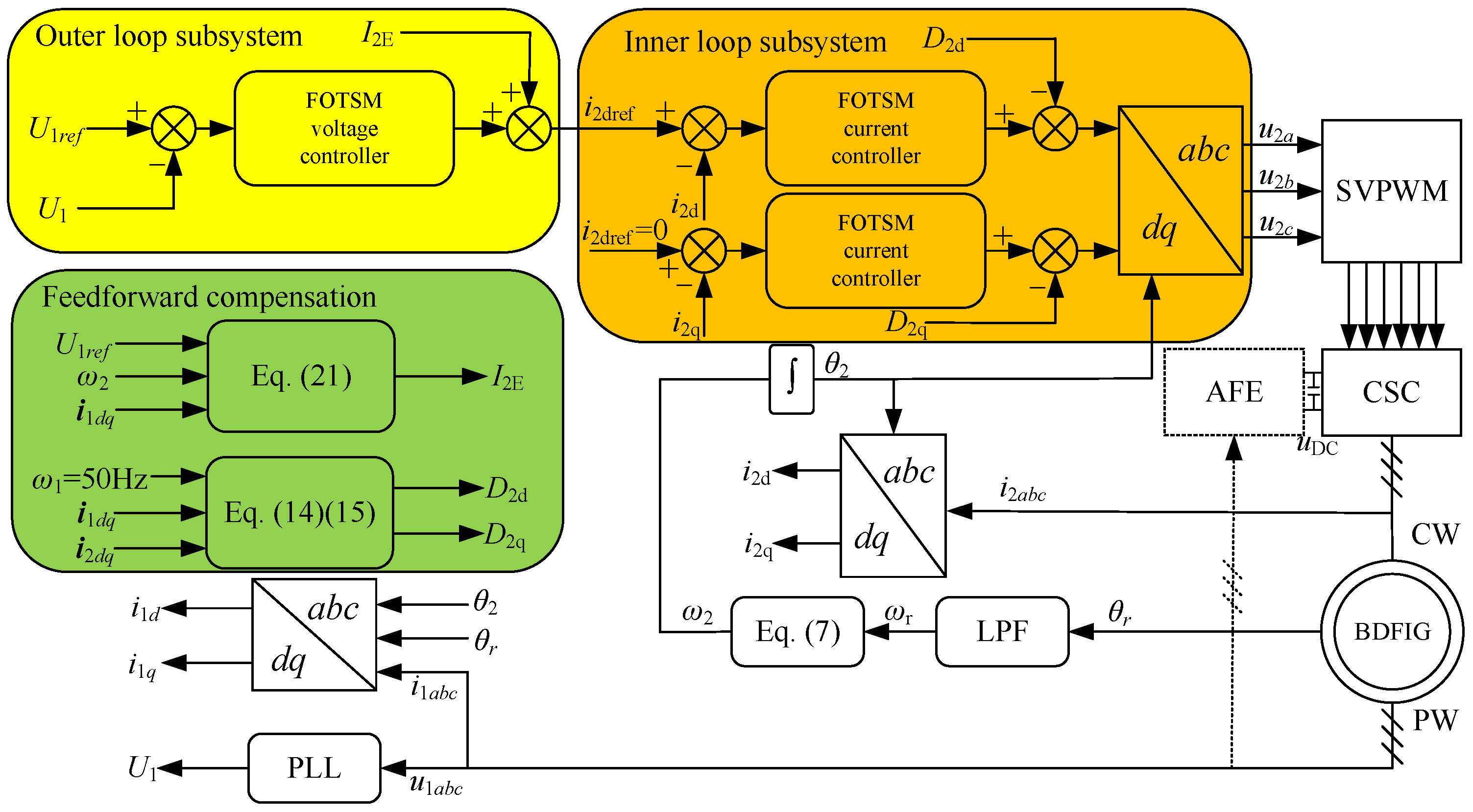
3. Full-Order Terminal Sliding-Mode Controller Design
4. Simulations
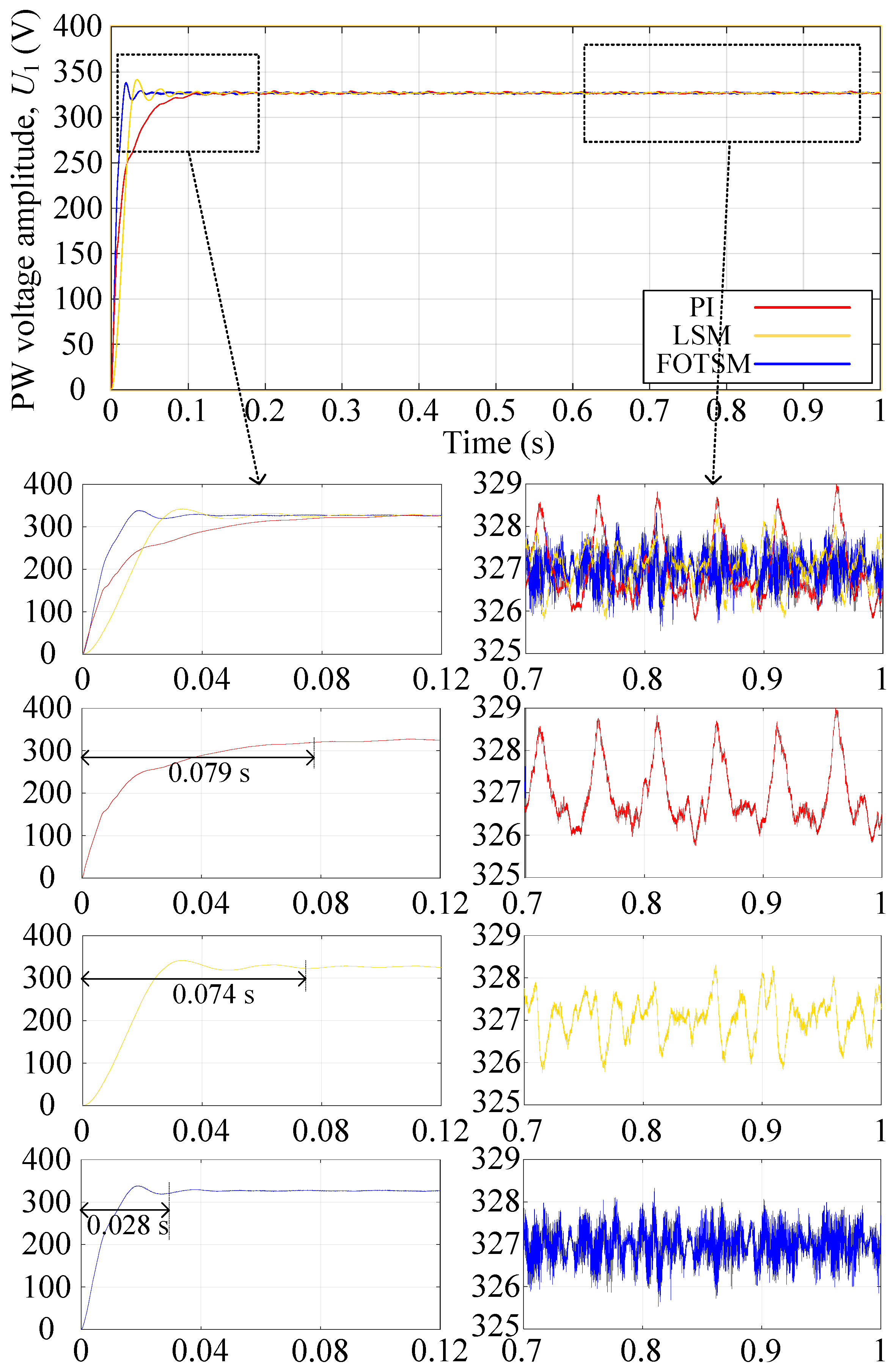
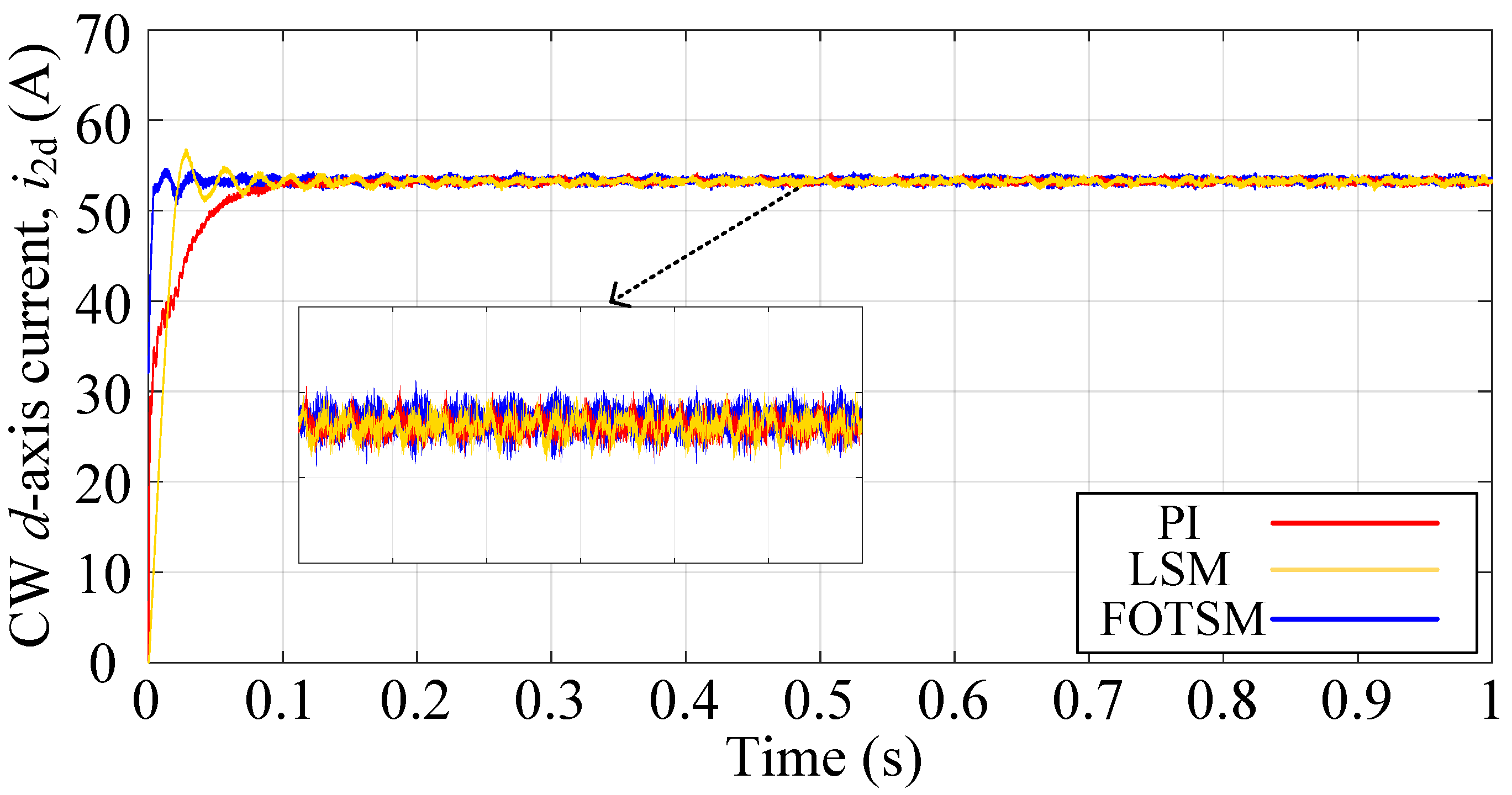
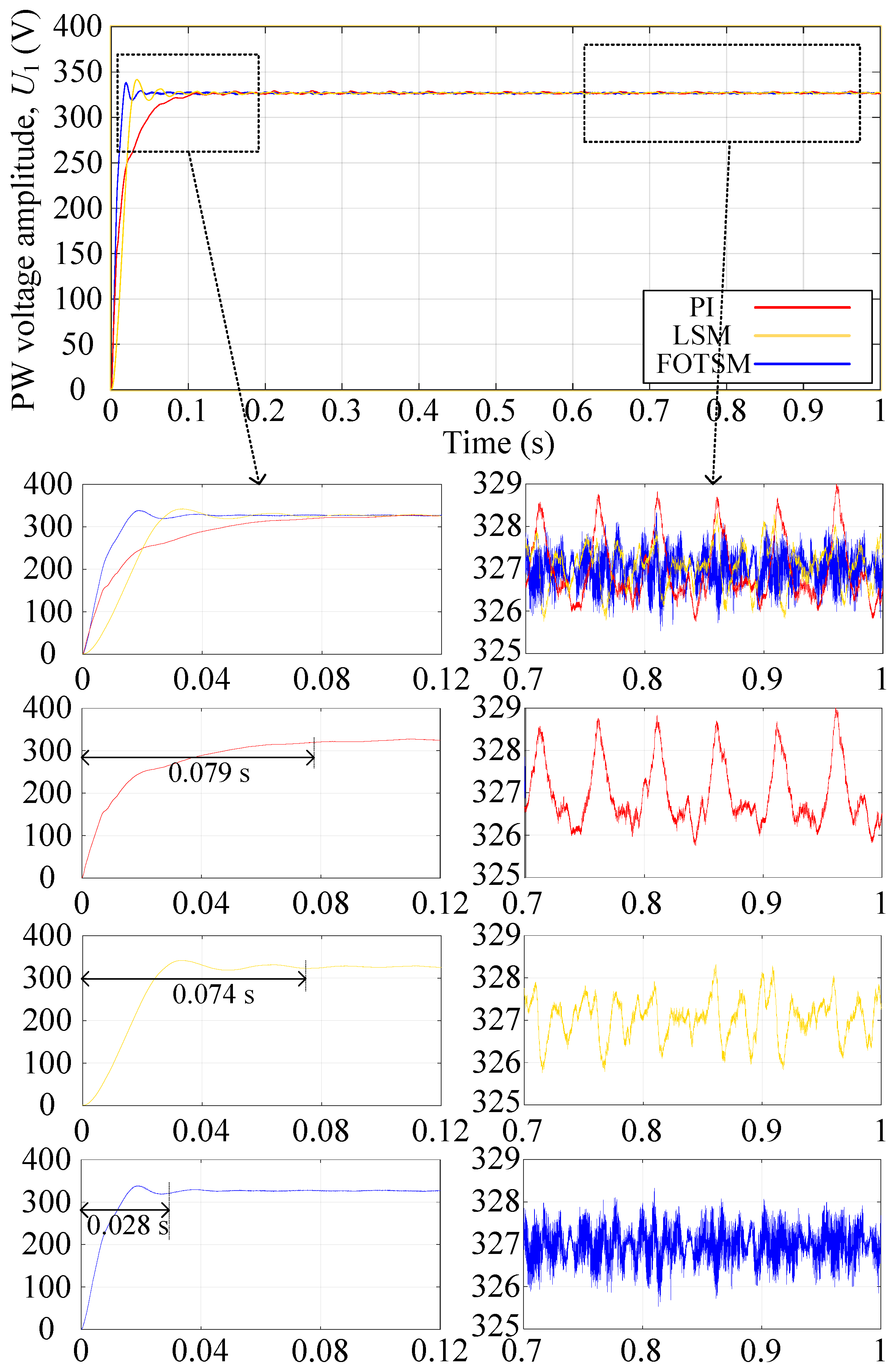
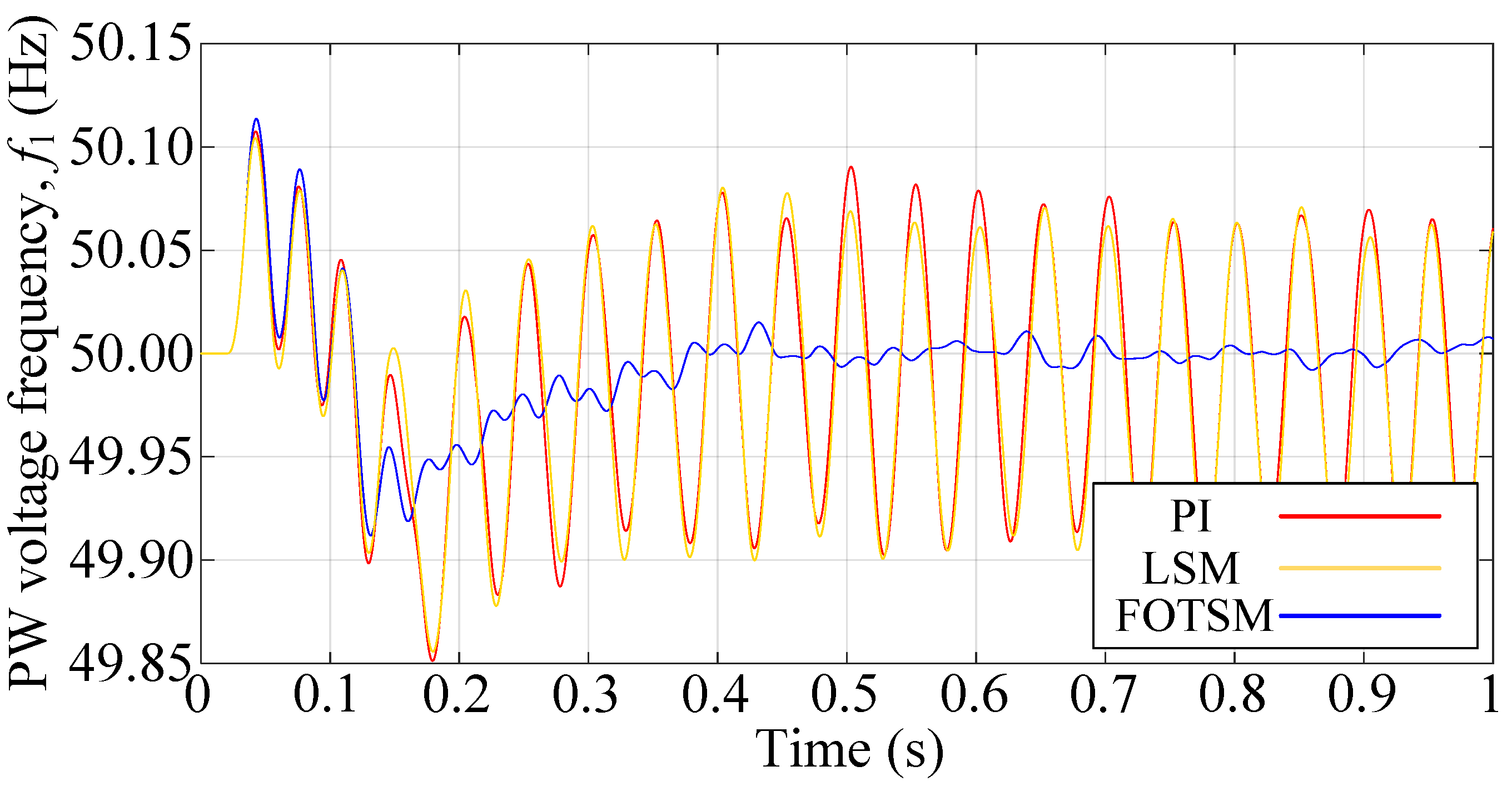
4.1. Start-Up Response
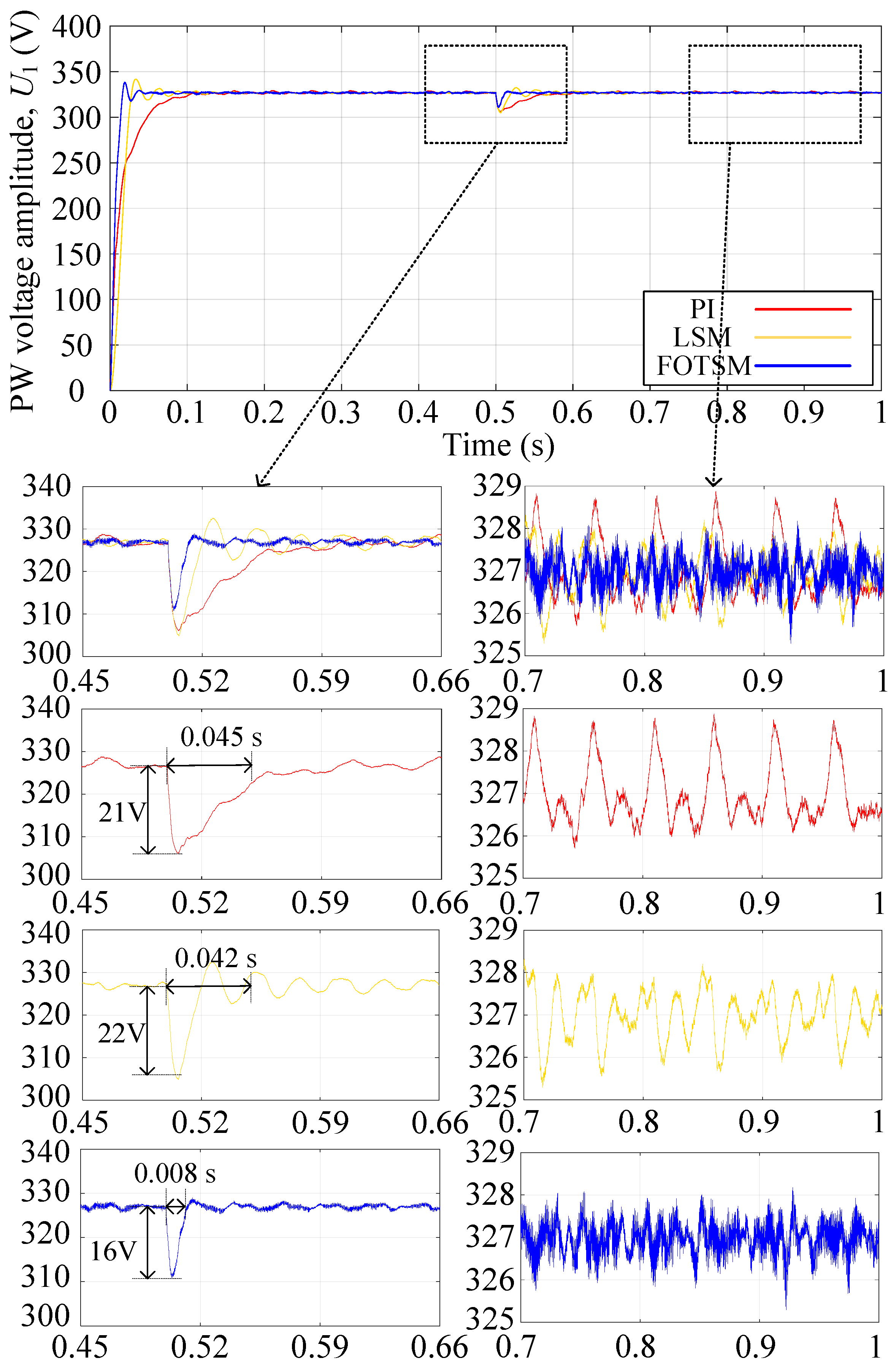
4.2. Load Adding Response
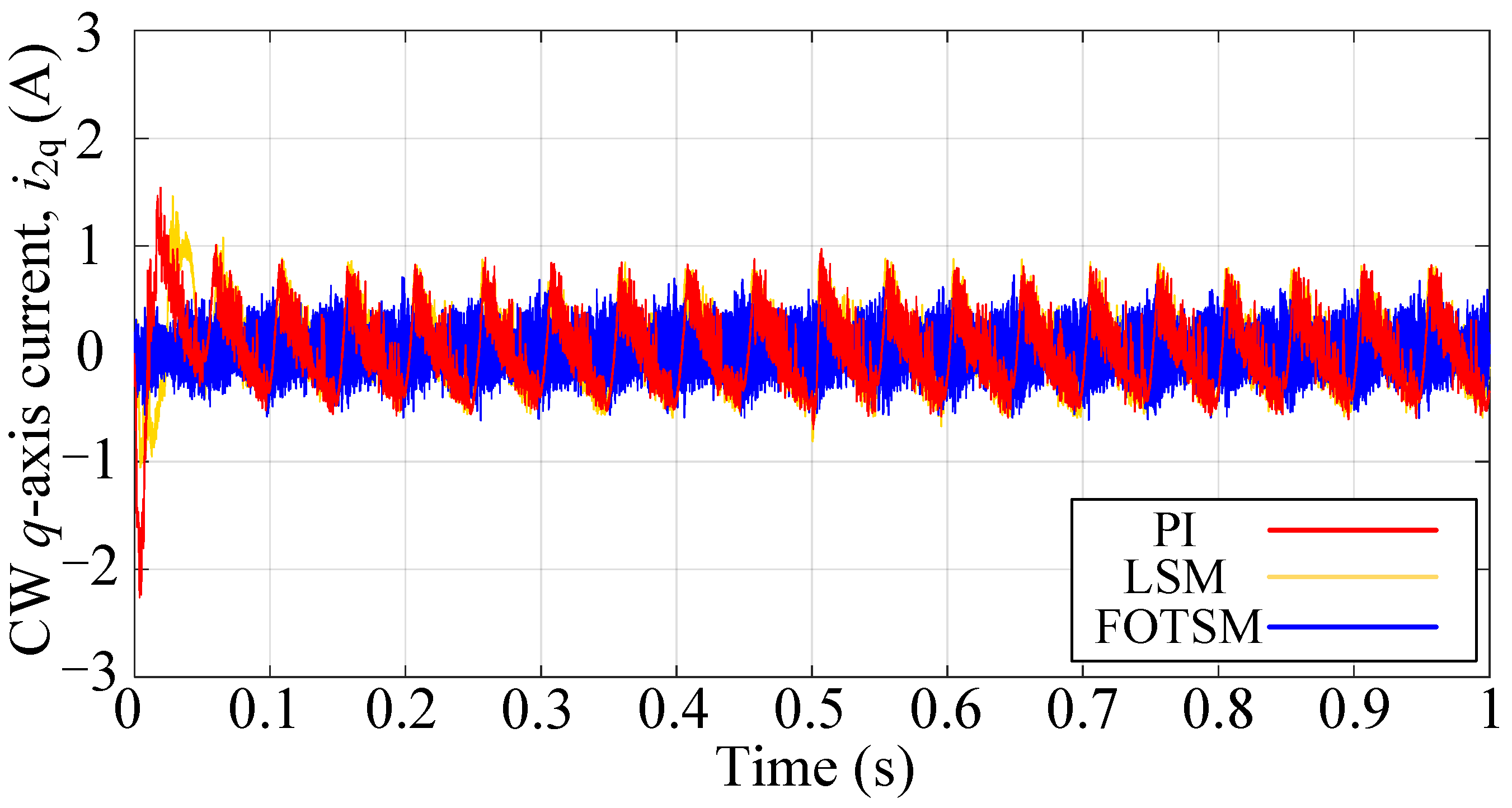
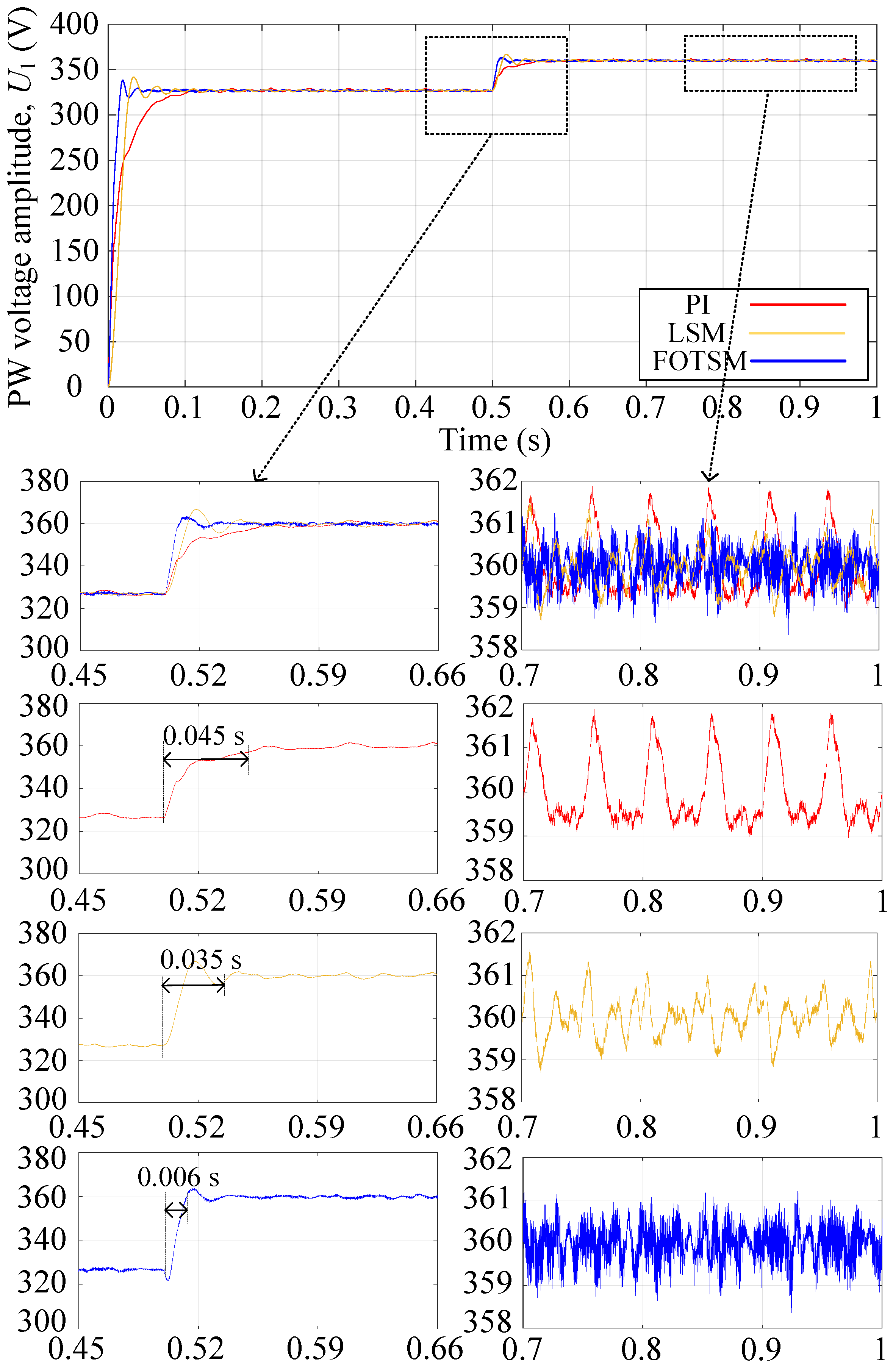
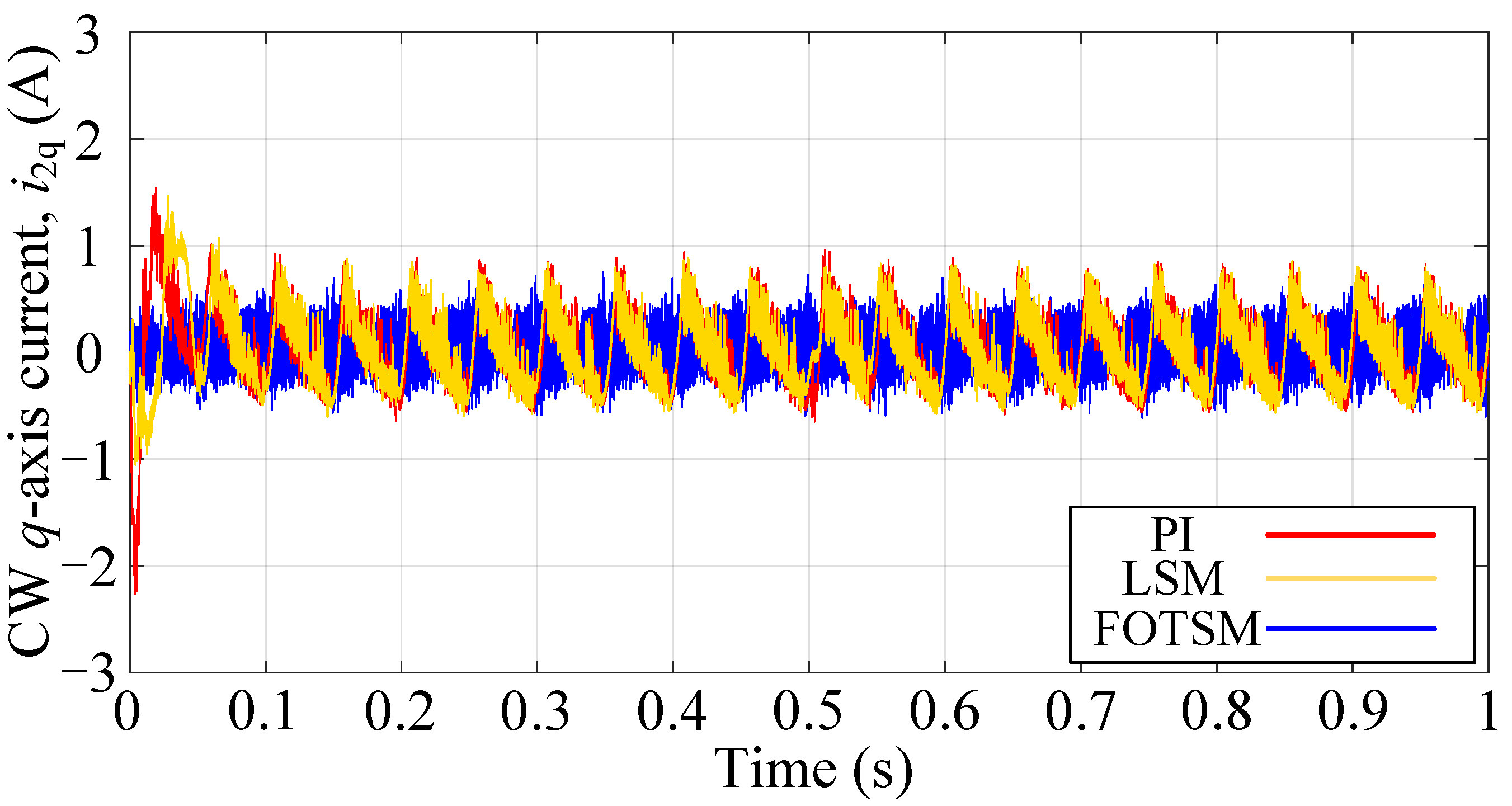
4.3. Voltage Change Response
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BDFIG | Brushless doubly fed induction generator |
| LSM | Linear sliding-mode |
| FOTSM | Full-order terminal sliding-mode |
| DFIG | Doubly fed induction generator |
| IM | Induction motor |
| PW | Power winding |
| CW | Control winding |
| VC | Vertor control |
| DTC | Direct torque control |
| MIMO | Mutiple-input-mutiple-output |
| PI | Practial proportional-integral |
| CSC | CW side converter |
| AFT | Active front end |
| MRAC | Model reference adaptive control |
| MPC | Model predictive control |
| ADRC | Active disturbance rejection control |
| SMC | Sliding-mode control |
| SVPWM | Signals of space vector pulse width modulationn |
| PWM | Pulse width modulation |
| Nomenclature | |
| Pole pair numbers of PW and CW. | |
| Angular frequencies of PW and CW. | |
| Actual and natural synchronous rotor speeds. | |
| Angular position of CW current vectors. | |
| Resistances of PW, CW, and rotor. | |
| Self-inductances of PW, CW, and rotor. | |
| Mutual inductance between PW and rotor. | |
| Mutual inductance between CW and rotor. | |
| Currents of PW, CW, and rotor. | |
| Voltages of PW, CW, and rotor. | |
| Fluxes of PW, CW, and rotor. | |
| s | Differential operator, . |
| U | Voltage amplitude. |
| Voltage vector. | |
| Current vector. | |
| Reference value. | |
| States in -axis. | |
| States in -axis. |
References
- Zeng, Y.; Cheng, M.; Wei, X.; Zhang, G. Grid-Connected and Standalone Control for Dual-Stator Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2021, 10, 9196–9206. [Google Scholar] [CrossRef]
- Xu, W.; Hussien, M.; Liu, Y.; Islam, M.; Allam, S. Sensorless Voltage Control Schemes for Brushless Doubly-Fed Induction Generators in Stand-Alone and Grid-Connected Applications. IEEE Trans. Energy Convers. 2020, 35, 1781–1795. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Ali, Z.; Ullah, N.; Ro, J.-S. A Super Twisting Fractional Order Terminal Sliding Mode Control for DFIG-Based Wind Energy Conversion System. Energies 2020, 13, 2158. [Google Scholar] [CrossRef]
- Min, L.; Chen, Y.; Debin, Z.; Jingyuan, S.; Yong, K. Virtual Synchronous Control Based on Control Winding Orientation for Brushless Doubly Fed Induction Generator (BDFIG) Wind Turbines Under Symmetrical Grid Faults. Energies 2019, 12, 319. [Google Scholar]
- Taluo, T.; Ristić, L.; Jovanović, M. Dynamic Modeling and Control of BDFRG under Unbalanced Grid Conditions. Energies 2021, 14, 4297. [Google Scholar] [CrossRef]
- Xu, W.; Elbabo, M.; Omer, M.; Liu, Y.; Islam, M.R. Negative Sequence Voltage Compensating for Unbalanced Standalone Brushless Doubly-Fed Induction Generator. IEEE Trans. Power Electron. 2020, 35, 667–680. [Google Scholar] [CrossRef]
- Ullah, N.; Sami, I.; Chowdhury, M.; Techato, K.; Alkhammash, H. Artificial Intelligence Integrated Fractional Order Control of Doubly Fed Induction Generator-Based Wind Energy System. IEEE Access 2021, 9, 5734–5748. [Google Scholar] [CrossRef]
- Han, P.; Cheng, M.; Jiang, Y.l.; Chen, Z. Torque/Power Density Optimization of a Dual-Stator Brushless Doubly-Fed Induction Generator for Wind Power Application. IEEE Trans. Ind. Electron. 2017, 64, 9864–9875. [Google Scholar] [CrossRef]
- Barati, F.; McMahon, R.; Shao, S.Y.; Abdi, E.; Oraee, H. Generalized Vector Control for Brushless Doubly Fed Machines with Nested-Loop Rotor. IEEE Trans. Ind. Electron. 2013, 60, 2477–2485. [Google Scholar] [CrossRef]
- Izaskun, S.; Javier, P.; Miguel, A.R.; Gonzalo, A. Direct torque control design and experimental evaluation for the brushless doubly fed machine. Energy Convers. Manag. 2011, 52, 142–149. [Google Scholar]
- Shao, S.Y.; Abdi, E.; McMahon, R. Low-Cost Variable Speed Drive Based on a Brushless Doubly-Fed Motor and a Fractional Unidirectional Converter. IEEE Trans. Ind. Electron. 2008, 59, 317–325. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, X.; Jia, W.X.; Ma, Y. Indirect Stator-Quantities Control for the Brushless Doubly Fed Induction Machine. IEEE Trans. Power Electron. 2014, 29, 1392–1401. [Google Scholar] [CrossRef]
- Sebtahmadi, S.S.; Pirasteh, H.; Aghay Kaboli, S.H.; Radan, A.; Mekhilef, S. A 12-Sector Space Vector Switching Scheme for Performance Improvement of Matrix-Converter-Based DTC of IM Drive. IEEE Trans. Power Electron. 2015, 30, 3804–3817. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, W.; Zhu, J.G.; Blaabjerg, F. Sensorless Control of Standalone Brushless Doubly Fed Induction Generator Feeding Unbalanced Loads in a Ship Shaft Power Generation System. IEEE Trans. Ind. Electron. 2019, 66, 739–749. [Google Scholar] [CrossRef]
- Lu, X.; Lai, J.; Liu, G. Master-Slave Cooperation for Multi-DC-MGs via Variable Cyber Networks. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Vargas, U.; Ramirez, A. Extended Harmonic Domain Model of a Wind Turbine Generator for Harmonic Transient Analysis. IEEE Trans. Power Deliv. 2016, 31, 1360–1368. [Google Scholar] [CrossRef]
- Kim, J.; Seok, J.K.; Muljadi, E.; Kang, Y. Adaptive Q-V Scheme for the Voltage Control of a DFIG-Based Wind Power Plant. IEEE Trans. Power Electron. 2016, 31, 3586–3599. [Google Scholar] [CrossRef]
- Qin, B.; Sun, H.; Ma, J.; Li, W.; Ding, T.; Wang, Z.; Zomaya, A.Y. Robust H∞ Control of Doubly Fed Wind Generator via State-Dependent Riccati Equation Technique. IEEE Trans. Power Syst. 2021, 34, 2390–2400. [Google Scholar] [CrossRef]
- Sharmila, V.; Rakkiyappan, R.; Joo, Y.H. Fuzzy Sampled-Data Control for DFIG-Based Wind Turbine with Stochastic Actuator Failures. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2199–2211. [Google Scholar] [CrossRef]
- Lu, L.; Avila, N.F.; Chu, C.C.; Yeh, T.W. Model Reference Adaptive Back-Electromotive-Force Estimators for Sensorless Control of Grid-Connected DFIGs. IEEE Trans. Ind. Appl. 2018, 54, 1701–1711. [Google Scholar] [CrossRef]
- Errouissi, R.; Al-Durra, A.; Muyeen, S.M.; Leng, S.Y.; Blaabjerg, F. Offset-Free Direct Power Control of DFIG Under Continuous-Time Model Predictive Control. IEEE Trans. Power Electron. 2017, 32, 2265–2277. [Google Scholar] [CrossRef]
- Tohidi, A.; Hajieghrary, H.; Hsieh, M.A. Adaptive Disturbance Rejection Control Scheme for DFIG-Based Wind Turbine: Theory and Experiments. IEEE Trans. Ind. Appl. 2016, 52, 2006–2015. [Google Scholar] [CrossRef]
- Lu, X.; Lai, J. Communication Constraints for Distributed Secondary Control of Heterogenous Microgrids: A Survey. IEEE Trans. Ind. Appl. 2021. [Google Scholar] [CrossRef]
- Lai, J.; Lu, X.; Dong, Z.; Cheng, S. Resilient Distributed Multiagent Control for AC Microgrid Networks Subject to Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2021. [Google Scholar] [CrossRef]
- Ruiz-Cruz, R.; Sanchez, E.N.; Loukianov, A.G.; Ruz-Hernandez, J.A. Real-Time Neural Inverse Optimal Control for a Wind Generator. IEEE Trans. Sustain. Energy 2019, 10, 1172–1183. [Google Scholar] [CrossRef]
- Hu, J.; He, N.; Hu, B.; He, Y.; Zhu, Z. Direct Active and Reactive Power Regulation of DFIG Using Sliding-Mode Control Approach. IEEE Trans. Energy Convers. 2010, 25, 1028–1039. [Google Scholar] [CrossRef]
- Lascu, C.; Boldea, I.; Blaabjerg, F. Direct torque control of sensorless induction motor drives: A sliding-mode approach. IEEE Trans. Ind. Appl. 2004, 40, 582–590. [Google Scholar] [CrossRef]
- Zhou, M.; Cheng, S.; Feng, Y.; Xu, W.; Wang, L.; Cai, W. Full-Order Terminal Sliding-Mode based Sensorless Control of Induction Motor with Gain Adaptation. IEEE J. Emerg. Sel. Top. Power Electron. 2021. [Google Scholar] [CrossRef]
- Sun, D.; Wang, X.; Nian, H.; Zhu, Z. A Sliding-Mode Direct Power Control Strategy for DFIG Under Both Balanced and Unbalanced Grid Conditions Using Extended Active Power. IEEE Trans. Power Electron. 2018, 33, 1313–1322. [Google Scholar] [CrossRef]
- Sadeghi, R.; Madani, S.M.; Ataei, M.; Agha Kashkooli, M.R.; Ademi, S. Super-Twisting Sliding Mode Direct Power Control of a Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2018, 65, 9147–9156. [Google Scholar] [CrossRef]
- Amin, I.K.; Uddin, M.N. Nonlinear Control Operation of DFIG-Based WECS Incorporated With Machine Loss Reduction Scheme. IEEE Trans. Power Electron. 2020, 35, 7031–7044. [Google Scholar] [CrossRef]
- Chen, S.; Cheung, N.C.; Wong, K.C.; Wu, J. Integral Sliding-Mode Direct Torque Control of Doubly-Fed Induction Generators Under Unbalanced Grid Voltage. IEEE Trans. Energy Convers. 2010, 25, 356–368. [Google Scholar] [CrossRef]
- Evangelista, C.; Valenciaga, F.; Puleston, P. Active and Reactive Power Control for Wind Turbine Based on a MIMO 2-Sliding Mode Algorithm with Variable Gains. IEEE Trans. Energy Convers. 2013, 28, 682–689. [Google Scholar] [CrossRef]
- Evangelista, C.A.; Pisano, A.; Puleston, P.; Usai, E. Receding Horizon Adaptive Second-Order Sliding Mode Control for Doubly-Fed Induction Generator Based Wind Turbine. IEEE Trans. Control Syst. Technol. 2016, 25, 73–84. [Google Scholar] [CrossRef]
- Yan, X.; Cheng, M.; Xu, L.; Zeng, Y. Dual-Objective Control Using an SMC-Based CW Current Controller for Cascaded Brushless Doubly Fed Induction Generator. IEEE Trans. Ind. Appl. 2020, 56, 7109–7120. [Google Scholar] [CrossRef]
- Zhang, G.; Yang, J.; Sun, Y.; Su, M.; Tang, W.; Zhu, Q.; Wang, H. A Robust Control Scheme Based on ISMC for the Brushless Doubly Fed Induction Machine. IEEE Trans. Power Electron. 2018, 33, 3129–3140. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal Sliding Mode Control—An Overview. IEEE Open J. Ind. Electron. Soc. 2021, 2, 36–52. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, M.; Zheng, X.; Han, F.; Yu, X. Full-order terminal sliding-mode control of MIMO systems with unmatched uncertainties. J. Frankl. Inst. 2017, 1, 1–22. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Mean | Value |
|---|---|---|
| Capacity | 30 kVA | |
| Speed range | 600–1200 rpm | |
| PW and CW pole pairs | 1, 3 | |
| PW rate voltage and current | 380 V, 45 A | |
| CW rate voltage and current | 0–350 V, 0–50 A | |
| PW resistances | ||
| CW resistances | ||
| Rotor resistances | ||
| PW inductances | 474.9 mH | |
| CW inductances | 32.16 mH | |
| rotor inductances | 225.2 mH | |
| Mutual inductance between PW and rotor | 306.9 mH | |
| Mutual inductance between CW and rotor | 25.84 mH |
| Control | Outer Loop Controller Parameters | Inner Loop Controller Parameters |
|---|---|---|
| PI | ||
| LSM | ||
| FOTSM |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Su, H.; Liu, Y.; Cai, W.; Xu, W.; Wang, D. Full-Order Terminal Sliding-Mode Control of Brushless Doubly Fed Induction Generator for Ship Microgrids. Energies 2021, 14, 7302. https://doi.org/10.3390/en14217302
Zhou M, Su H, Liu Y, Cai W, Xu W, Wang D. Full-Order Terminal Sliding-Mode Control of Brushless Doubly Fed Induction Generator for Ship Microgrids. Energies. 2021; 14(21):7302. https://doi.org/10.3390/en14217302
Chicago/Turabian StyleZhou, Minghao, Hongyu Su, Yi Liu, William Cai, Wei Xu, and Dong Wang. 2021. "Full-Order Terminal Sliding-Mode Control of Brushless Doubly Fed Induction Generator for Ship Microgrids" Energies 14, no. 21: 7302. https://doi.org/10.3390/en14217302
APA StyleZhou, M., Su, H., Liu, Y., Cai, W., Xu, W., & Wang, D. (2021). Full-Order Terminal Sliding-Mode Control of Brushless Doubly Fed Induction Generator for Ship Microgrids. Energies, 14(21), 7302. https://doi.org/10.3390/en14217302