
Distributed Finite-Time Secondary Frequency and Voltage Restoration Control Scheme of an Islanded AC Microgrid


Abstract
:1. Introduction
- Reliability: No central controller is needed. Therefore, if any inverter or communication link fails, it will not lead to a catastrophic failure. In addition, communication congestion can be relieved [11].
- Flexibility: The plug-and-play capability supported by the distributed control can enhance the flexibility of the system.
- Scalability: When a new unit is added into the system, the distributed control does not need to change.
- To the best of the authors’ knowledge, a consensus-based, finite-time secondary frequency and voltage restoration control scheme of an islanded MG is first proposed in this paper.
- Unlike the centralized topology, the proposed method is fully distributed. The cooperative secondary control uses only its local information and the information of its neighbors through a sparse undirected communication network.
- In the case of frequency restoration, the proposed control can meet the active power sharing in a finite time. Just using a single protocol, stability proof is provided rigorously for frequency restoration and active power sharing based on Lyapunov method, and the upper bound on the convergence time is derived in detail.
- In comparison with the traditional distributed controllers in [17,20,21,22,23,24,25,26], the consensus-based reactive power sharing control strategy is proposed to eliminate the reactive power distribution error caused by the mismatch of line impedance. Combined with the reactive power sharing control method, the finite-time control protocol for voltage restoration is proposed, and the Lyapunov function is constructed to prove its stability. The upper bound of convergence time is established, which only depends on the communication graph structure, so the protocol is a promising application in large-scale systems.
2. Multi-Agent Distributed Coordinated Control Theory
2.1. Graph Theory
- If , can be derived.
- The semi-positive definiteness of means the eigenvalues of are real and non-negative. Let be the second smallest eigenvalue, if the , one has .
- Define a diagonal matrix ; then, the equation can be derived. Let be the smallest eigenvalue of the matrix F ; then, one has .
2.2. Mathmatical Model of the Network System
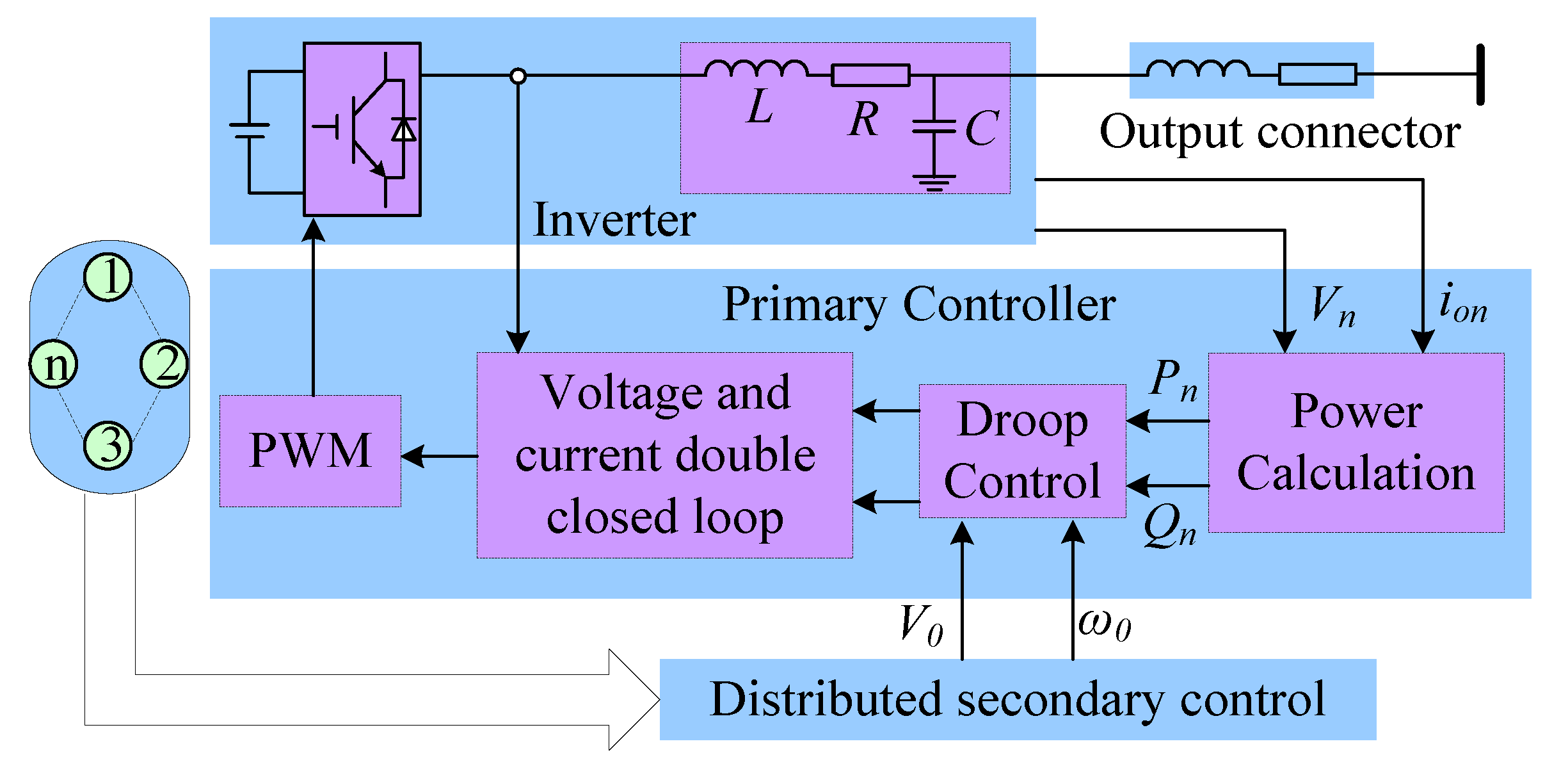
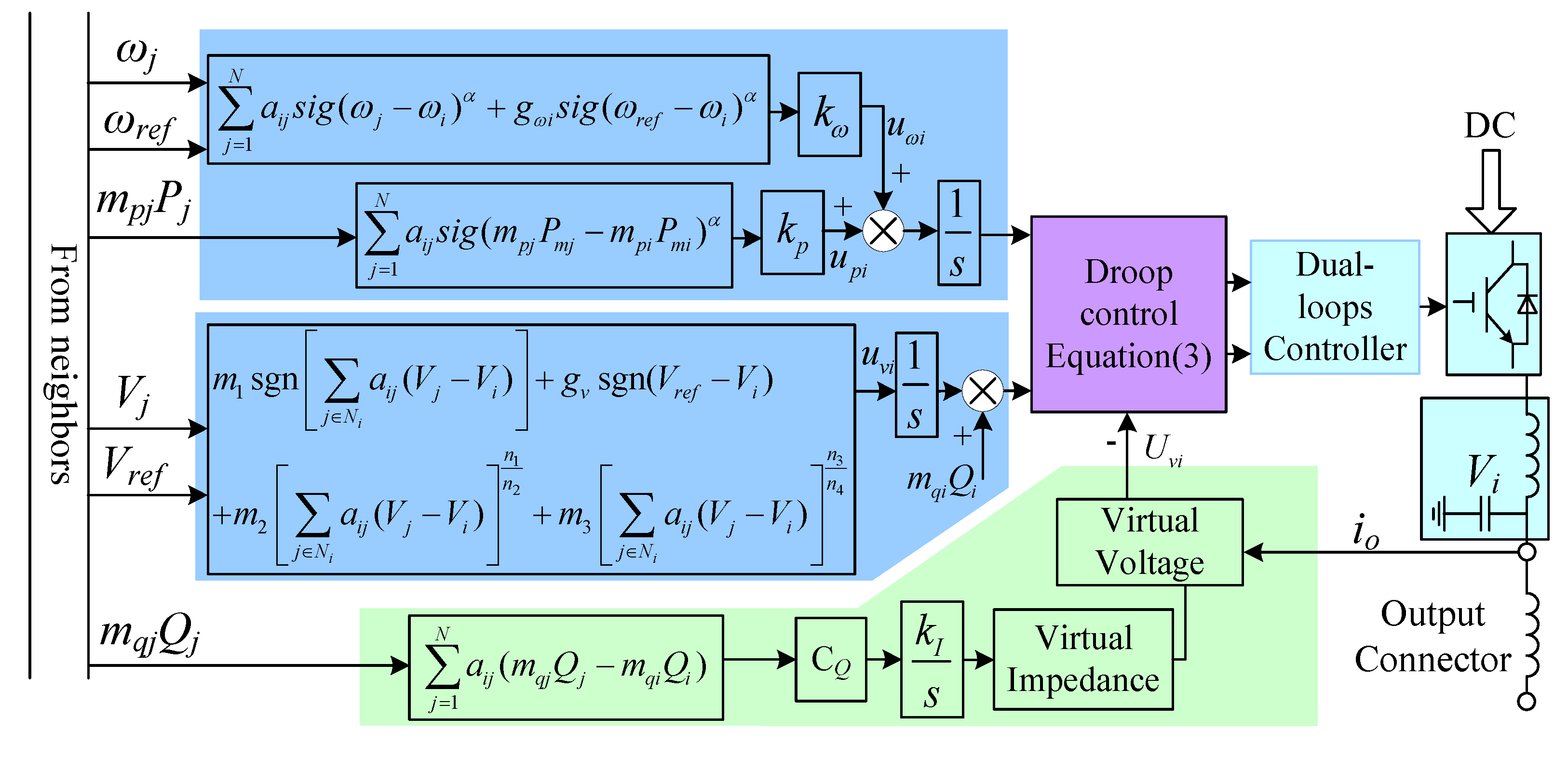
3. Proposed Distributed Finite-Time Convergence Control Based on a Multi-Agent Consensus Algorithm
3.1. Distributed Secondary Frequency Restoration and Active Power Sharing
3.2. Distributed Secondary Voltage Restoration and Reactive Power Sharing
3.2.1. Reactive Power Consistency Control Based on Adaptive Virtual Impedance
3.2.2. Distributed Finite-Time Secondary Voltage Control
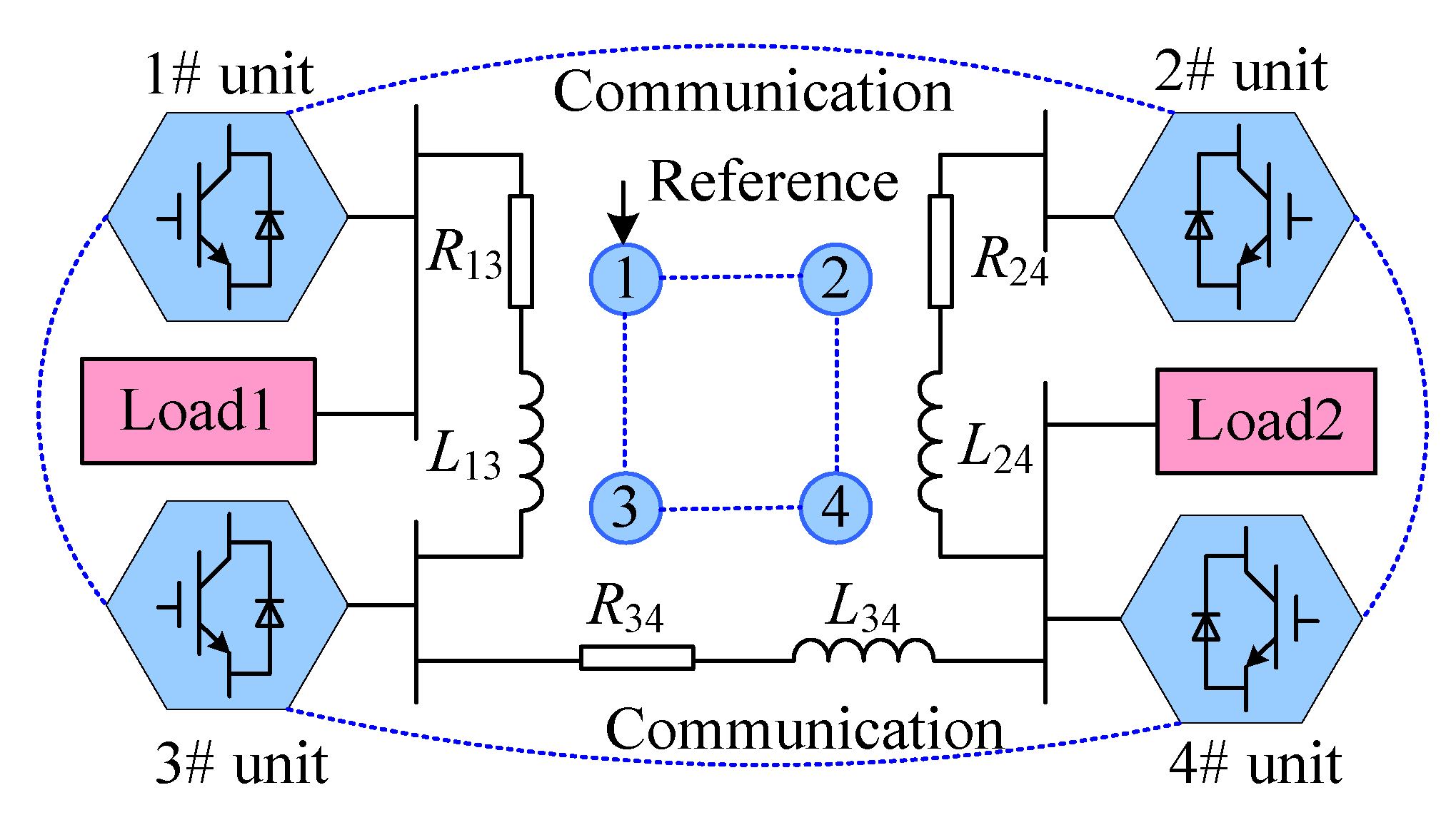
4. Case Study
- To verify the effectiveness in achieving voltage and frequency restoration and power sharing;
- To verify the robustness of the proposed method under plug-and-play operation;
- Compared with two typical distributed control protocols in large system to demonstrate the advantage of the proposed method.
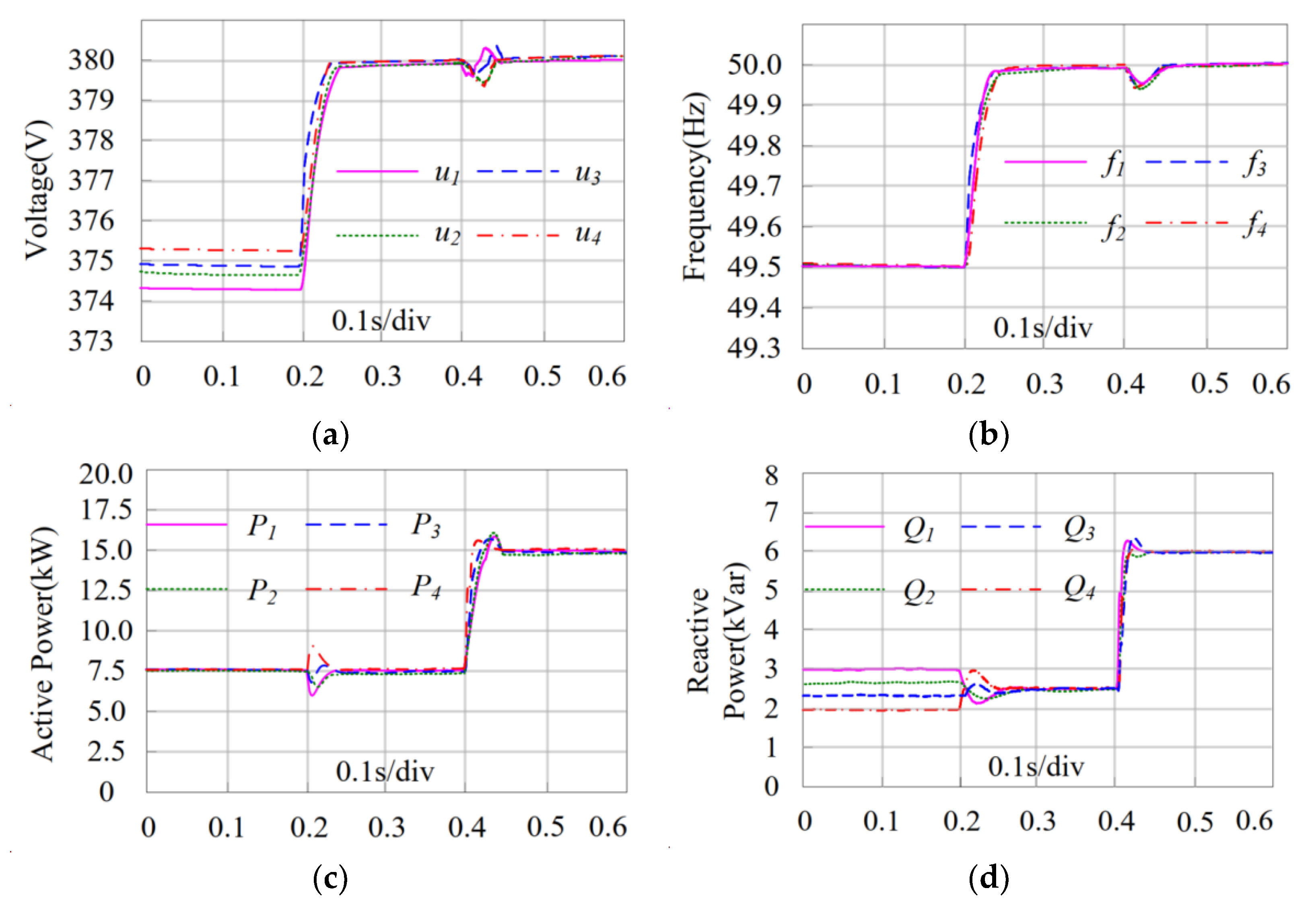
4.1. Case Study 1: Controller Performance
- t = 0.0 s (simulation initialization period), only the droop control is activated and only load#1 is connected to the network;
- t = 0.2 s, the proposed secondary control is applied;
- t = 0.4 s, Load#2 is connected.
4.2. Case Study 2: Plug-and-Play Capability
- At simulation in the initialization period (t = 0.0 s), the proposed secondary distributed controller is activated and t = 0.2 s, 2# inverter is disconnected from the network;
- At t = 0.4 s, 2# inverter is reconnected to the network.
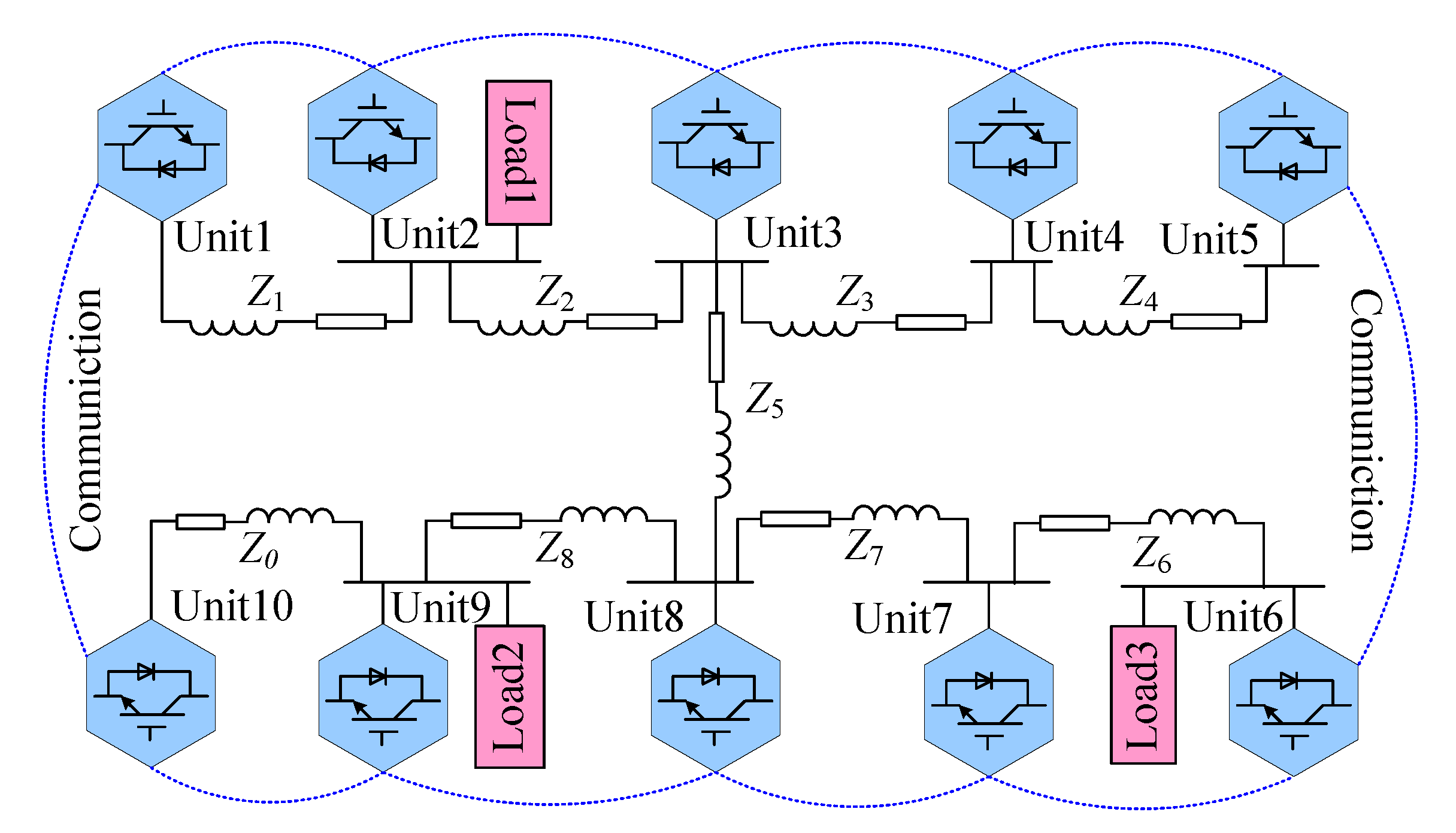
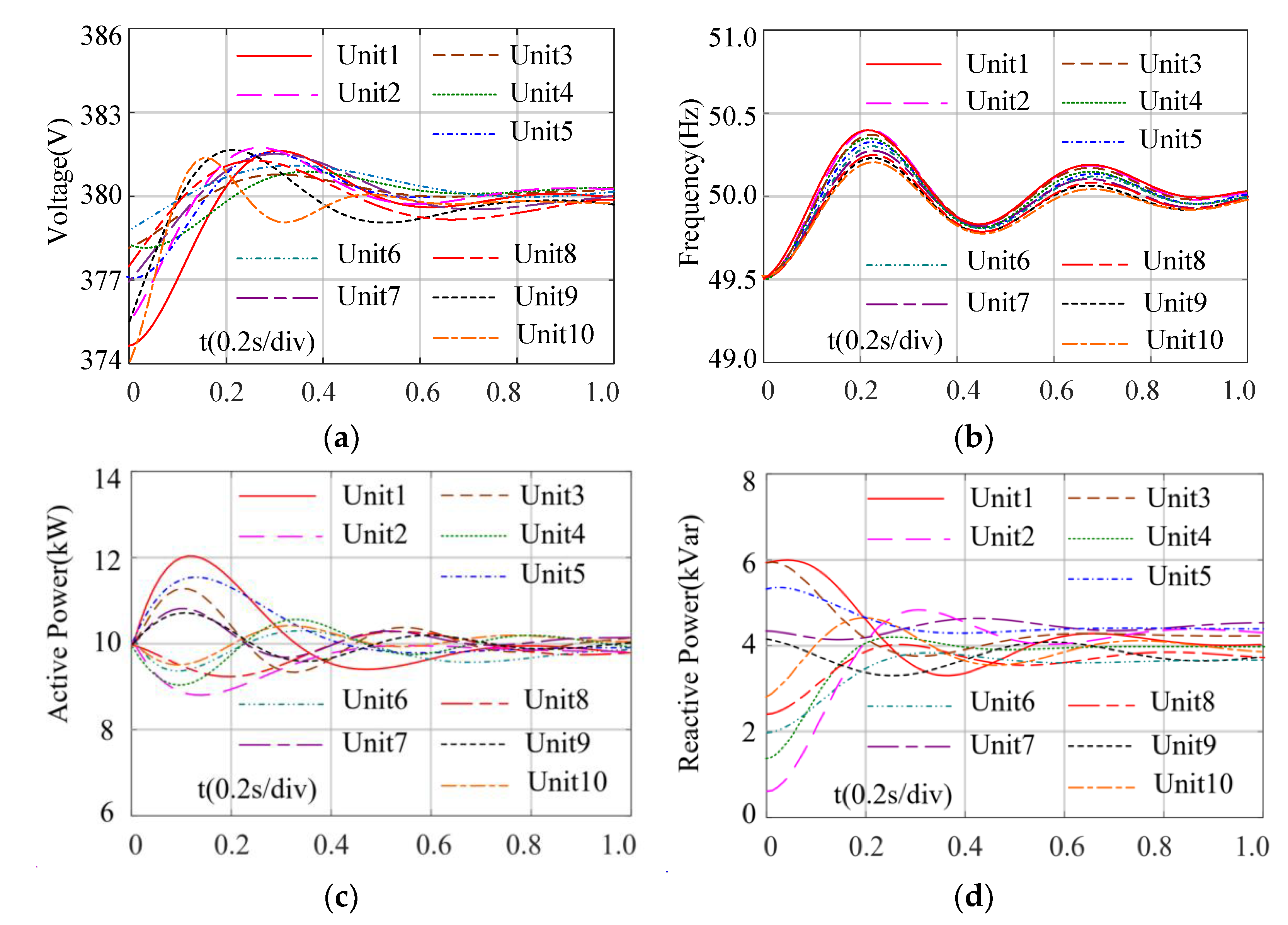
4.3. Case Study 3: Comparing the Proposed Method with Two Typical Methods in a Large System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Meaning |
| Pi, Qi | The active and reactive power injected by unit i |
| mpi, mqi | Frequency and voltage droop coefficients |
| V0i, ω0i | Primary control references for voltage and frequency |
| kω, kp | Two positive coefficients for the auxiliary frequency controller |
| n1, n2, n3, n4 | Four odd integers for the auxiliary voltage controller |
| m1, m2, m3 | Three positive coefficients for the auxiliary voltage controller |
| Rvi, Lvi | Virtual resistance and inductance |
| Rref, Lref | Constant parts of virtual resistance and virtual inductance |
| kI | Integral coefficient |
| kδ_R, kδ_L | The adjust coefficients for virtual resistance and virtual inductance |
| λBω | The smallest eigenvalue of LBω + Dρω |
| λCp | The second smallest eigenvalue of LCp |
References
- Meng, W.; Wang, X. Distributed Energy Management in Smart Grid With Wind Power and Temporally Coupled Constraints. IEEE Trans. Ind. Electron. 2017, 64, 6052–6062. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z. Distributed Optimal Resource Management Based on the Consensus Algorithm in a Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2584–2592. [Google Scholar] [CrossRef]
- Nunna, H.K.; Doolla, S. Multiagent-Based Distributed-Energy-Resource Management for Intelligent Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1678–1687. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Automat. Contr. 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Espina, E.; Llanos, J.; Burgos-Mellado, C.; Cárdenas-Dobson, R.; Martínez-Gómez, M.; Sáez, D. Distributed control strategies for microgrids: An overview. IEEE Access. 2020, 8, 193412–193448. [Google Scholar] [CrossRef]
- Prodanovic, M.; Green, T.C. High-Quality Power Generation Through Distributed Control of a Power Park Microgrid. IEEE Trans. Ind. Electron. 2006, 53, 1471–1482. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Xiao, F. Finite-time consensus problems for networks of dynamic agents. IEEE Trans. Automat. Contr. 2010, 55, 950–955. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed Control Techniques in Microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Cintuglu, M.H.; Youssef, T.; Mohammed, O.A. Development and application of a real-time testbed for multiagent system interoperability: A case study on hierarchical microgrid control. IEEE Trans. Smart Grid 2018, 9, 1759–1768. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Agelidis, V.G. Control Strategies for Microgrids with Distributed Energy Storage Systems: An Overview. IEEE Trans. Smart Grid 2018, 9, 3652–3666. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids-a novel approach. IEEE Trans. Power Electron 2014, 29, 1018–1031. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Kim, S.; Sun, Q.; Zhou, J. Distributed Adaptive Virtual Impedance Control for Accurate Reactive Power Sharing Based on Consensus Control in Microgrids. IEEE Trans. Smart Grid 2017, 8, 1749–1761. [Google Scholar] [CrossRef]
- Shafiee, Q.; Nasirian, V.; Vasquez, J.C.; Guerrero, J.M.; Davoudi, A. A Multi-Functional Fully Distributed Control Framework for AC Microgrids. IEEE Trans. Smart Grid 2018, 9, 3247–3258. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Duan, J.; Ma, H.; Chow, M.Y. Distributed Adaptive Droop Control for Optimal Power Dispatch in DC Microgrid. IEEE Trans. Ind. Electron. 2018, 65, 778–789. [Google Scholar] [CrossRef]
- Lu, X.; Yu, X.; Lai, J.; Guerrero, J.M.; Zhou, H. Distributed Secondary Voltage and Frequency Control for Islanded Microgrids With Uncertain Communication Links. IEEE Trans. Ind. Inform. 2017, 13, 448–460. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.; Xu, Y.; Sun, H.; Shen, X. Distributed, Bounded and Finite-Time Convergence Secondary Frequency Control in an Autonomous Microgrid. IEEE Trans. Smart Grid 2019, 10, 2776–2788. [Google Scholar] [CrossRef]
- Guan, Z.H.; Sun, F.L.; Wang, Y.W.; Li, T. Finite-Time Consensus for Leader-Following Second-Order Multi-Agent Networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2646–2654. [Google Scholar] [CrossRef]
- Lu, X.; Lu, R.; Chen, S.; Lu, J. Finite-time distributed tracking control for multi-agent systems with a virtual leader. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 352–362. [Google Scholar] [CrossRef]
- Lou, G.; Gu, W.; Xu, Y.; Cheng, M.; Liu, W. Distributed MPC-Based Secondary Voltage Control Scheme for Autonomous Droop-Controlled Microgrids. IEEE Trans. Sustain. Energy 2017, 8, 792–804. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Zuo, S.; Davoudi, A.; Song, Y.; Lewis, F.L. Distributed Finite-Time Voltage and Frequency Restoration in Islanded AC Microgrids. IEEE Trans. Ind. Electron. 2016, 10, 5988–5997. [Google Scholar] [CrossRef]
- Lai, J.; Lu, X.; Xin, L.; Tang, R.L. Distributed Multiagent-oriented Average Control for Voltage Restoration and Reactive Power Sharing of Autonomous Microgrids. IEEE Access. 2018, 6, 25551–25561. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, H. Distributed Finite-Time Convergence Control of an Islanded Low-Voltage AC Microgrid. IEEE Trans. Power Syst. 2018, 33, 2339–2348. [Google Scholar] [CrossRef]
- Bidram, A.; Member, S.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M.; Member, S. Distributed Cooperative Secondary Control of Microgrids Using Feedback Linearization. IEEE Trans. Power Syst. 2013, 28, 3462–3470. [Google Scholar] [CrossRef] [Green Version]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Qu, Z. Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener. Transm. Distrib. 2013, 7, 822–831. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Shafiee, Q.; Dorfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary Frequency and Voltage Control of Islanded Microgrids via Distributed Averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Han, H.; Liu, Y.; Sun, Y.; Su, M.; Guerrero, J.M. An Improved Droop Control Strategy for Reactive Power Sharing in Islanded Microgrid. IEEE Trans. Power Electron. 2014, 30, 3133–3141. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.W.; Kao, C.N. An accurate power control strategy for power-electronics-interfaced distributed generation units operating in a low-voltage multibus microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Reference [17] | Reference [21] | Reference [22] | Reference [24] | Reference [20] | Reference [23] |
|---|---|---|---|---|---|---|
| Frequency Restoration | Yes | Yes | Yes | Yes | No | No |
| Voltage Restoration | No | Yes | Yes | Yes | Yes | Yes |
| Active Power Sharing | Yes | No | Yes | Yes | No | No |
| Reactive Power Sharing | No | No | No | YES, but need stability analysis | No | YES, but need stability analysis |
| Parameter | Value |
|---|---|
| R13, R24, R34 | 0.18 Ω, 0.28 Ω, 0.26 Ω |
| L13, L24, L34 | 0.26 mH, 0.28 mH, 0.16 mH |
| Load1 | 30 kW, 12 kVar |
| Load2 | 30 kW, 12 kVar |
| Parameter | Value |
|---|---|
| mp, mq | 2.68 × 10−5 rad/W, 0.9 × 10−3 V/Var |
| kω, kp | 30, 40 |
| m1, m2, m3 | 8, 16, 32 |
| n1, n2, n3, n4 | 7, 5, 3, 5 |
| Rref, Lref | 0.06 Ω, 0.36 mH |
| kδ_L, kδ_R, kI | 1.8 × 10−4, 1.06 × 10−2, 2.16 |
| Parameter | Value |
|---|---|
| Z0, Z1, Z2 | 0.18 Ω, 0.26 mH |
| Z3, Z4, Z6 | 0.28 Ω, 0.28 mH |
| Z7, Z8, Z9 | 0.26 Ω, 0.16 mH |
| Z5 | 0.36 Ω, 0.36 mH |
| Load1 | 30 kW, 12 kVar |
| Load2 | 30 kW, 12 kVar |
| Load3 | 40 kW, 16 kVar |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Wang, X.; Zhang, S.; Gao, H. Distributed Finite-Time Secondary Frequency and Voltage Restoration Control Scheme of an Islanded AC Microgrid. Energies 2021, 14, 6266. https://doi.org/10.3390/en14196266
Ma J, Wang X, Zhang S, Gao H. Distributed Finite-Time Secondary Frequency and Voltage Restoration Control Scheme of an Islanded AC Microgrid. Energies. 2021; 14(19):6266. https://doi.org/10.3390/en14196266
Chicago/Turabian StyleMa, Junjie, Xudong Wang, Siyan Zhang, and Hanying Gao. 2021. "Distributed Finite-Time Secondary Frequency and Voltage Restoration Control Scheme of an Islanded AC Microgrid" Energies 14, no. 19: 6266. https://doi.org/10.3390/en14196266
APA StyleMa, J., Wang, X., Zhang, S., & Gao, H. (2021). Distributed Finite-Time Secondary Frequency and Voltage Restoration Control Scheme of an Islanded AC Microgrid. Energies, 14(19), 6266. https://doi.org/10.3390/en14196266