Fault-Structure-Based Active Fault Diagnosis: A Geometric Observer Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A new framework of the fault-structure-based active fault diagnosis is proposed, and the geometric observer is introduced to active fault diagnosis. Using the geometric observer, active fault detection and isolation can be realized simultaneously.
- The requirements of the auxiliary signals are given, and the corresponding auxiliary signals are designed to detect incipient faults. The amplitudes of the designed auxiliary signals are very small and therefore they have little effect on the system performance.
- This proposed method can realize the combination of active fault diagnosis and passive fault diagnosis. For incipient faults, auxiliary signals are designed to carry out active fault diagnosis. For significant faults, passive fault diagnosis can be directly carried out without modifying the observer.
2. Problem Formulation
3. Main Results
3.1. Geometric Observer Design
- For fault mode i, calculate the unobservability subspaces ;
- Find matrix satisfying ;
- Calculate the canonical projection ;
- Let denote the map induced by on the factor space ;
- Calculate matrix satisfying ;
- According to the equation , we get ;
- Let . By designing appropriate , the spectrum of can be configured, or disturbance suppression can be performed;
- Let and .
3.2. Auxiliary Input Design
- should be in the same direction as .
- should not be too large, mainly for the following two reasons. First, during system operation, cannot seriously affect system performance. Second, cannot completely cover the fault signal to prevent inability to distinguish whether a fault occurs.
- cannot be too small to enhance fault characteristics.
- The auxiliary signal should be actually generatable, and the signal form should be as simple as possible, such as constant signal or piecewise constant signal.
3.3. Residual Evaluation
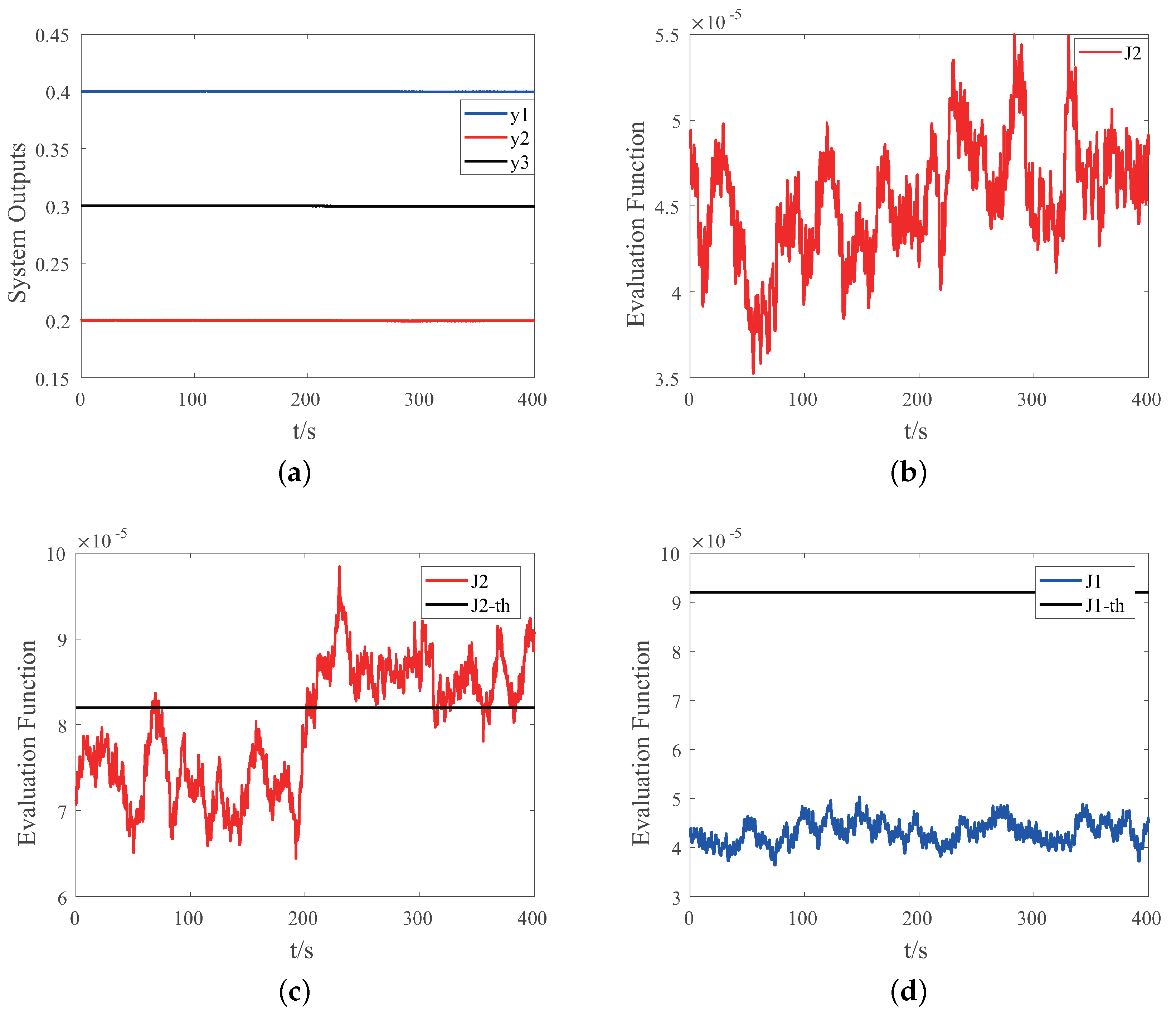
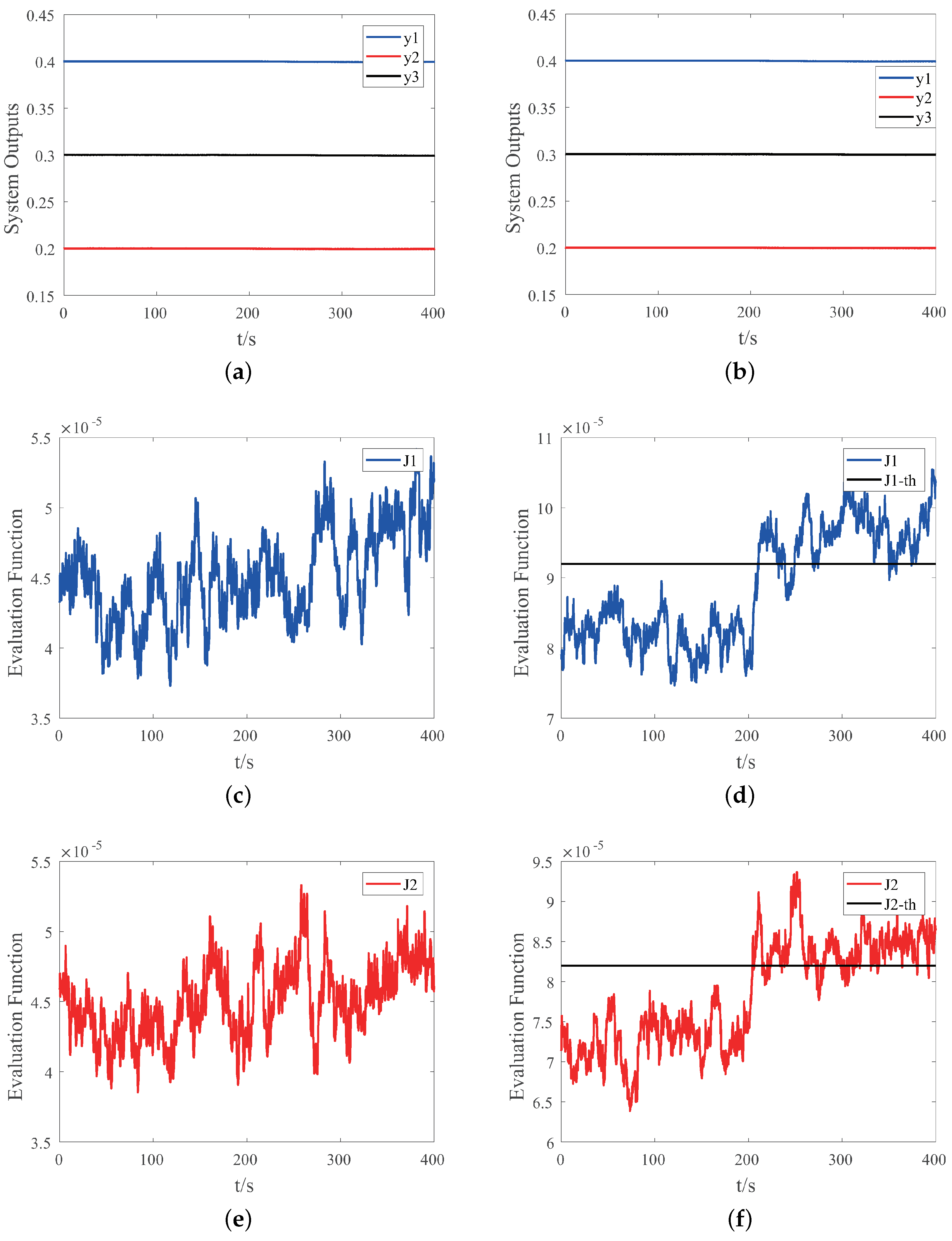
4. Numerical Simulation
4.1. Simulation Results of the Proposed Method
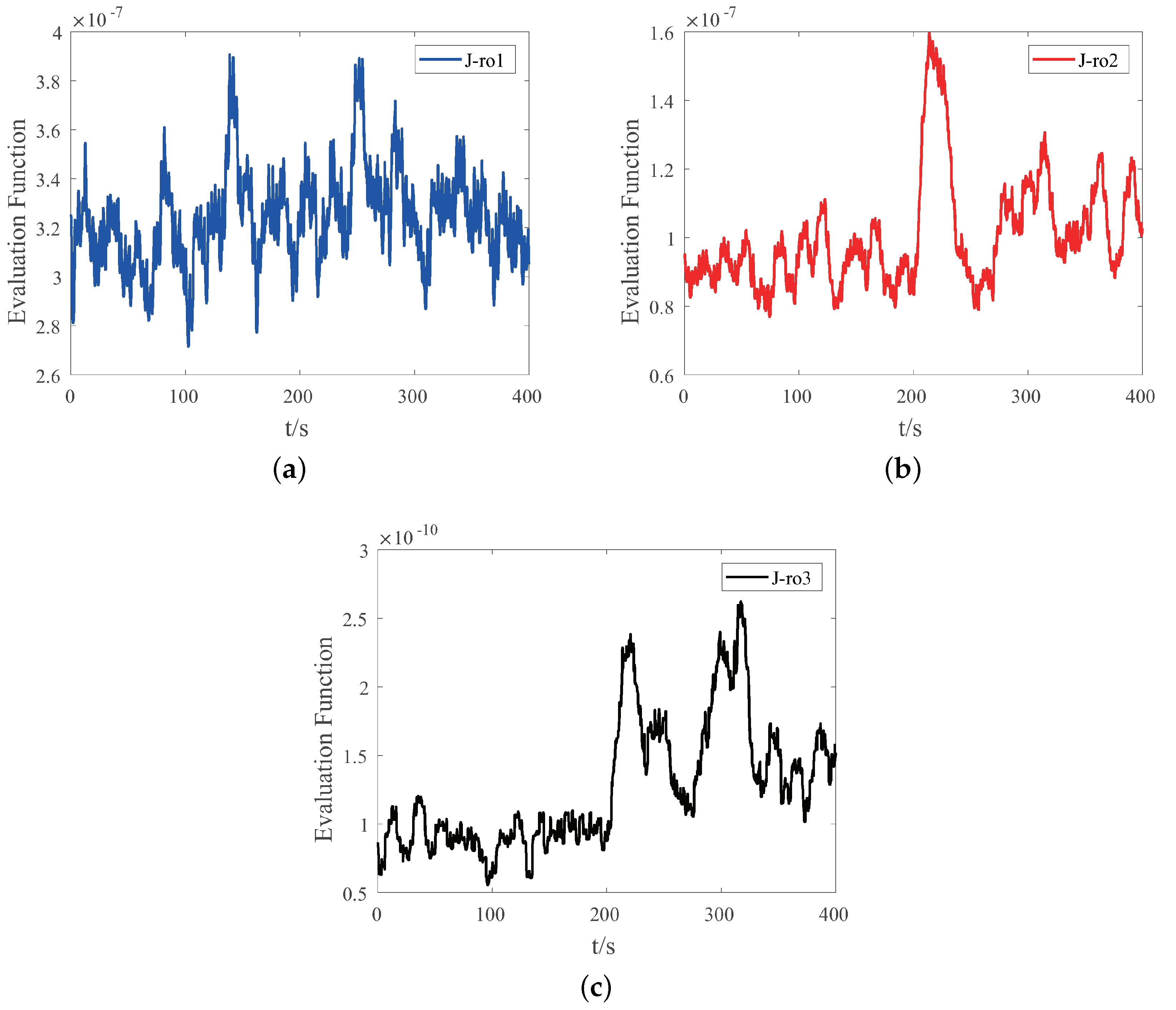
4.2. Compared with Robust Observer
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- He, X.; Guo, Y.Q.; Zhang, Z.; Jia, F.L.; Zhou, D.H. Active fault diagnosis for dynamic systems. Acta Autom. Sin. 2020, 46, 1557–1570. [Google Scholar]
- Zhang, K.; Zhou, D.H.; Chai, Y. Review of multiple fault diagnosis methods. Acta Autom. Sin. 2015, 32, 1143–1157. [Google Scholar]
- Gao, Z.W.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, J.; Lang, Z.Q.; Qin, S.J. Perspectives on data-driven operation monitoring and selfoptimization of industrial processes. Acta Autom. Sin. 2018, 44, 1944–1956. [Google Scholar]
- Wang, H.; Wang, H.B.; Jiang, G.Q.; Li, J.M.; Wang, Y.L. Early fault detection of wind turbines based on operational condition clustering and optimized deep belief network modeling. Energies 2019, 12, 984. [Google Scholar] [CrossRef]
- Mao, Z.H.; Yan, X.G.; Jiang, B.; Chen, M. Adaptive fault-tolerant sliding-mode control for high-speed trains with actuator faults and uncertainties. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2449–2460. [Google Scholar] [CrossRef]
- Xue, T.; Zhong, M.Y.; Li, L.L.; Ding, S.X. An optimal data-driven approach to distribution independent fault detection. IEEE Trans. Ind. Inform. 2020, 16, 6826–6836. [Google Scholar] [CrossRef]
- Piltan, F.; Kim, C.H.; Kim, J.M. Advanced adaptive fault diagnosis and tolerant control for robot manipulators. Energies 2019, 12, 1281. [Google Scholar] [CrossRef]
- He, X.; Wang, Z.D.; Liu, Y.; Qin, L.G.; Zhou, D.H. Fault tolerant control for an Internet-based Three-tank system: Accommodation to sensor bias faults. IEEE Trans. Ind. Electron. 2017, 64, 2266–2275. [Google Scholar] [CrossRef]
- Heirung, T.A.N.; Mesbah, A. Input design for active fault diagnosis. Annu. Rev. Control 2019, 47, 35–50. [Google Scholar] [CrossRef]
- Zhang, X.J.; Zarrop, M.B. Auxiliary signals for improving online fault detection. In Proceedings of the International Conference on Control, Oxford, UK, 13–15 April 1988. [Google Scholar]
- Puncochar, I.; Skach, J. A survey of active fault diagnosis methods. IFAC-PapersOnLine 2018, 51, 1091–1098. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, J.J.; Qu, B.; Wu, H.Y.; Zhou, J.L. Unified architecture of active fault detection and partial active fault-tolerant control for incipient faults. IEEE Trans. Syst. Man. Cybern.-Syst. 2017, 47, 1688–1700. [Google Scholar] [CrossRef]
- Marseglia, G.R.; Raimondo, D.M. Active fault diagnosis: A multi-parametric approach. Automatica 2017, 79, 223–230. [Google Scholar] [CrossRef]
- Lin, F.; Wang, L.Y.; Chen, W.; Han, L.; Shen, B. N-diagnosability for active online diagnosis in discrete event systems. Automatica 2017, 83, 220–225. [Google Scholar] [CrossRef]
- Nikoukhah, R.; Campbell, S.L. Auxiliary signal design for active failure detection in uncertain linear systems with a priori information. Automatica 2006, 42, 219–228. [Google Scholar] [CrossRef]
- Wang, Y.; Olaru, S.; Valmorbida, G.; Puig, V.; Cembrano, G. Set-invariance characterizations of discrete-time descriptor systems with application to active mode detection. Automatica 2019, 107, 255–263. [Google Scholar] [CrossRef]
- Heirung, T.A.N.; Mesbah, A. Stochastic nonlinear model predictive control with active model discrimination: A closed-loop fault diagnosis application. IFAC-PapersOnLine 2017, 50, 15934–15939. [Google Scholar] [CrossRef]
- Blackmore, L.; Rajamanoharan, S.; Williams, B. Active estimation for jump markov linear systems. IEEE Trans. Autom. Control 2008, 53, 2223–2236. [Google Scholar] [CrossRef]
- Yang, J.W.; Hamelin, F.; Sauter, D. Active fault diagnosis based on a framework of optimization for closed loop system. In Proceedings of the 2014 International Conference on Control, Decision and Information Technologies, Metz, France, 3–5 November 2014; pp. 387–392. [Google Scholar]
- Blanchini, F.; Casagrande, D.; Giordano, G.; Miani, S.; Olaru, S.; Reppa, V. Active fault isolation: A duality-based approach via convex programming. SIAM J. Control Optim. 2017, 55, 1619–1640. [Google Scholar] [CrossRef]
- Scott, J.K.; Findeisen, R.; Braatz, R.D.; Raimondo, D.M. Input design for guaranteed fault diagnosis using zonotopes. Automatica 2014, 50, 1580–1589. [Google Scholar] [CrossRef]
- Scott, J.K.; Raimondo, D.M.; Marseglia, G.R.; Braatz, R.D. Constrained zonotopes: A new tool for set-based estimation and fault detection. Automatica 2016, 69, 126–136. [Google Scholar] [CrossRef]
- Raimondo, D.M.; Marseglia, G.R.; Braatz, R.D.; Scott, J.K. Closed-loop input design for guaranteed fault diagnosis using set-valued observers. Automatica 2016, 74, 107–117. [Google Scholar] [CrossRef]
- Karami, H.; Ghasemi, R.; Mohammadi, F. Adaptive neural observer-based nonsingular terminal sliding mode controller design for a class of nonlinear sytems. In Proceedings of the International Conference on Control, Instrumentation, and Automation, Sanandaj, Iran, 30–31 October 2019. [Google Scholar]
- Manouchehri, P.; Ghasemi, R.; Toloei, A.; Mohammadi, F. Distributed neural observer-based formation strategy of affine nonlinear multi-agent systems with unknown dynamics. J. Circuits Syst. Comput. 2020. [Google Scholar] [CrossRef]
- Massoumnia, M.A.; Verghese, G.C.; Willsky, A.S. Failure detection and identification. IEEE Trans. Autom. Control 1989, 34, 316–321. [Google Scholar] [CrossRef]
- Meskin, N.; Khorasani, K. A geometric approach to fault detection and isolation of continuous-time Markovian jump linear systems. IEEE Trans. Autom. Control 2010, 55, 1343–1357. [Google Scholar] [CrossRef]
- Longhi, S.; Monteriu, A. Fault detection and isolation of linear discrete-time periodic systems using the geometric approach. IEEE Trans. Autom. Control 2017, 62, 1518–1523. [Google Scholar] [CrossRef]
- Hammouri, H.; Kabore, P.; Kinnaert, M. A geometric approach to fault detection and isolation for bilinear systems. IEEE Trans. Autom. Control 2001, 46, 1451–1455. [Google Scholar] [CrossRef]
- Bokor, J.; Balas, G. Detection filter design for LPV systemsła geometric approach. Automatica 2004, 40, 511–518. [Google Scholar] [CrossRef]
- Yu, L. Robust Control: Linear Matrix Inequality Method; Tsinghua University Press: Beijing, China, 2002. [Google Scholar]
- Zhou, D.H.; He, X.; Wang, Z.D.; Liu, G.P.; Ji, Y.D. Leakage fault diagnosis for an internet-based three-tank system: An experimental study. IEEE Trans. Control Syst. Technol. 2012, 20, 857–870. [Google Scholar] [CrossRef]
- Ge, W.; Fang, C.Z. Detection of faulty components via robust observation. Int. J. Control 1988, 47, 581–599. [Google Scholar] [CrossRef]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; He, X. Fault-Structure-Based Active Fault Diagnosis: A Geometric Observer Approach. Energies 2020, 13, 4475. https://doi.org/10.3390/en13174475
Zhang Z, He X. Fault-Structure-Based Active Fault Diagnosis: A Geometric Observer Approach. Energies. 2020; 13(17):4475. https://doi.org/10.3390/en13174475
Chicago/Turabian StyleZhang, Zhao, and Xiao He. 2020. "Fault-Structure-Based Active Fault Diagnosis: A Geometric Observer Approach" Energies 13, no. 17: 4475. https://doi.org/10.3390/en13174475
APA StyleZhang, Z., & He, X. (2020). Fault-Structure-Based Active Fault Diagnosis: A Geometric Observer Approach. Energies, 13(17), 4475. https://doi.org/10.3390/en13174475