Full Coverage of Optimal Phasor Measurement Unit Placement Solutions in Distribution Systems Using Integer Linear Programming

 , ,
, ,  , , ,
, , ,  , , and
, , and
Abstract
:1. Introduction
2. Optimal PMU Placement
2.1. Formulation of the OPP Problem
2.2. Integer Linear Programming
- Minimizing the number of PMU while ensuring system observability.
- Maximizing the SORI using limited number of PMUs.
3. Proposed Method to Identify All the Optimal Solutions
- (1)
- Minimization of number of PMU using ILP. This step has been explained in detail in Section 2.2. The minimum number of PMU obtained in this step is denoted as N and included in following step as the second constraint as shown in Equation (5).
- (2)
- Generating multiple solutions that maximize the SORI. These multiple solutions may not cover all the optimal solutions that maximizes the SORI, so the next few steps are designed to locate all the optimal solutions.
- (3)
- Classification of network buses according to multiple solutions is obtained in Step (2).
- (4)
- Grouping of uncertain buses and forming subnetworks.
- (5)
- Optimization of each subnetwork in an exhaustive manner.
- (6)
- Summarize the placement strategy and list all the optimal solutions.
3.1. Generating Multiple Solutions
- It is possible that some solutions are identical with some other, which means that the number of actual solutions could be less than .
- If multiple solutions exist for the original problem, to would NOT be identical. In other words, more than one distinct solution will be obtained by step (2) as long as multiple solutions exist for this problem.
- Solutions to , irrespective of whether they are identical, are solutions to the original optimization problem which has the original coefficient , and that they share the same maximized value of SORI. The proof is given in Appendix A.1.
- Finally, to may not cover all the multiple solutions to the original problem. In other words, some alternative optimal solutions could be missing from the collection of to .
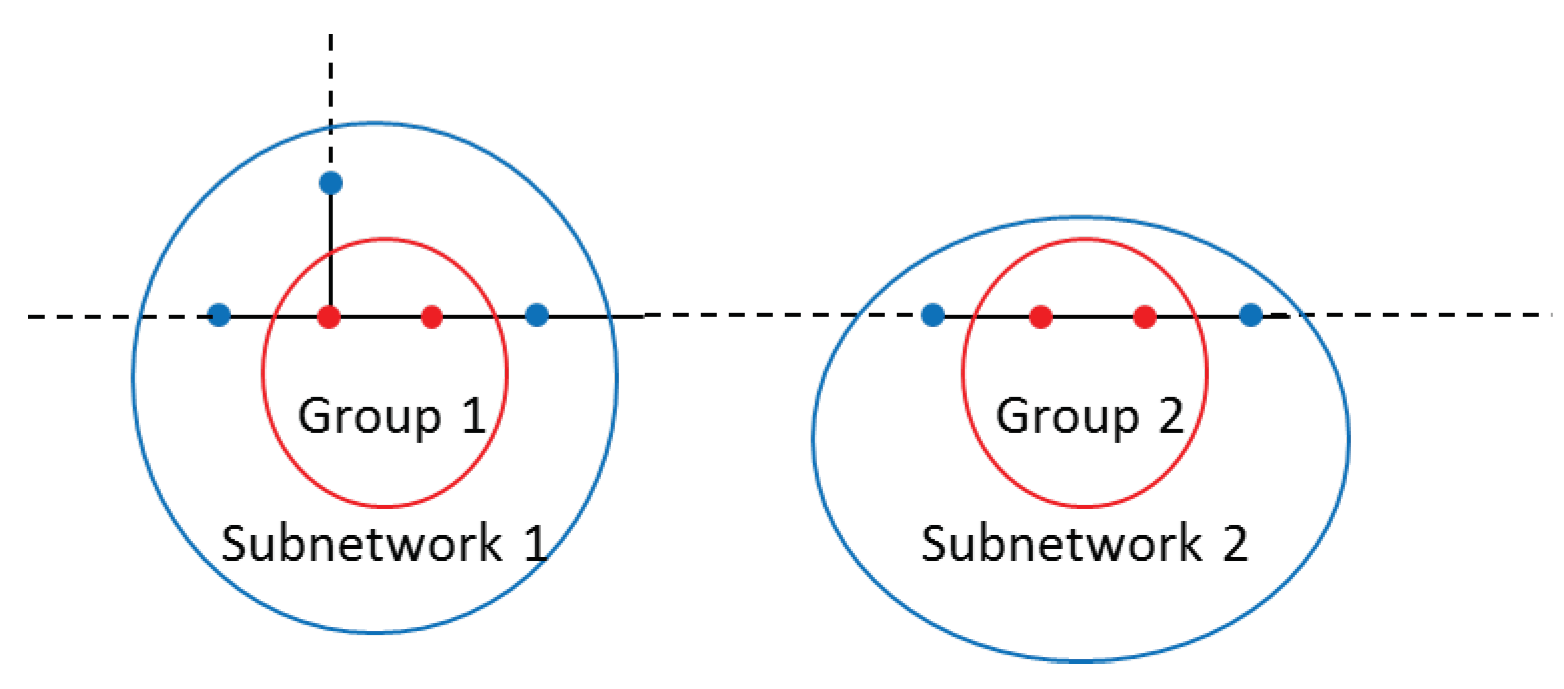
3.2. Classification of Network Buses
- The first category includes those buses that are allocated with PMUs in each of these multiple solutions. These buses are called primary buses and they form the set .
- The second category includes those buses that are not allocated with PMUs in each of these multiple solutions. These buses are called trivial buses and they form the set .
- The rest of the system buses are classified into the third category. These buses are allocated PMUs in some of these multiple solutions, but are not allocated PMUs in the other multiple solutions. These buses are called uncertain buses and they form the set .
3.3. Group of Uncertain Buses
3.4. Subnetwork Optimization
- All the primary buses are assigned PMUs. Since the number of primary buses is less than the minimum number of PMU, there will be some PMUs remain unassigned.
- The remaining PMUs are allocated to each subnetwork. Based on the optimization results for individual subnetwork, it is known how many PMUs should be assigned to each subnetwork and how they should be placed to render the subnetwork observable and achieve the maximum SORI.
3.5. OPP Considering PMU Loss
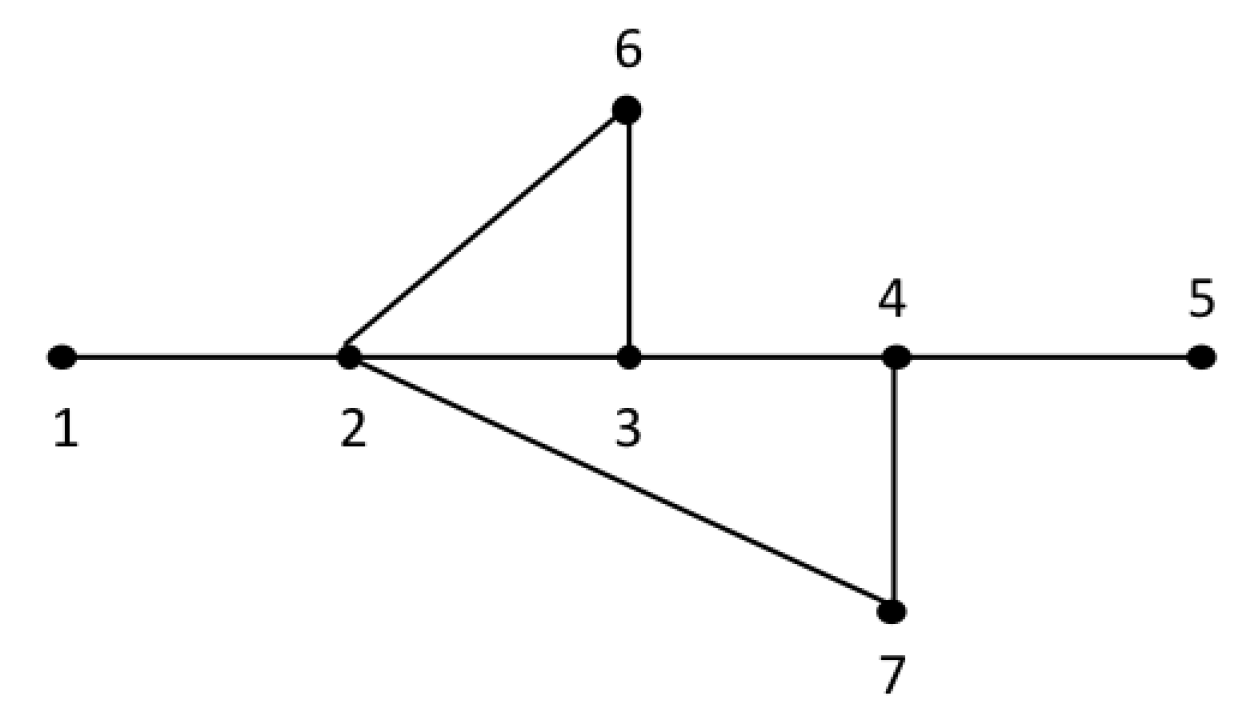
3.6. Tutorial Example
4. Case Studies and Results
4.1. IEEE 33 Node Test Feeder
- (1)
- Minimizing the number of PMUs. Applying Equation (4) yields the minimum number of PMUs required to make the system observable as 11, that is, .
- (2)
- Maximizing the SORI to obtain multiple solutions. Optimize Equation (5) with 66 different and then obtain 66 solutions. After deleting the repeated solutions, four distinct solutions are left and the PMUs are installed at the following buses:
- 2, 4, 8, 11, 14, 17, 21, 24, 26, 29, 32.
- 2, 5, 8, 11, 14, 17, 21, 24, 26, 29, 32.
- 2, 5, 8, 11, 14, 17, 21, 24, 27, 29, 32.
- 2, 5, 8, 11, 14, 17, 21, 24, 27, 30, 32.
- (3)
- Classifying network buses based on the four distinct solutions obtained from the previous step.
- Primary buses: 2, 8, 11, 14, 17, 21, 24, 32.
- Uncertain buses: 4, 5, 26, 27, 29, 30.
- Trivial buses: 1, 3, 6, 7, 9, 10, 12, 13, 15, 16, 18, 19, 20, 22, 23, 25, 28, 31, 33.
- (4)
- Grouping uncertain buses. After grouping adjacent uncertain buses, three groups and subnetworks are formed. However, these three subnetworks have overlapping buses. Hence, these subnetworks are merged into one larger subnetwork, as illustrated in Figure 4. The overlapping buses are buses 6 and 28. The blue box indicates the merged subnetwork. There are ten nodes in this subnetwork, and only six of them are candidate locations.
- (5)
- Minimizing the number of PMU for this subnetwork using Equation (9) gives the minimum number of PMU needed for this subnetwork as 3.
- (6)
- Maximizing the SORI for this subnetwork. There are six candidate buses in this subnetwork. The previous step yields the minimum number of PMU in this subnetwork as three. Therefore, there are 20 possible combinations of candidate locations. After examining the observability and SORI of the subnetwork, four optimal placements are identified.
- (7)
- Obtaining the optimal placements for this network by following the sub-steps below. The results are given in Table 1. According to Table 1, it is clear that:
- (a)
- at least 11 PMUs are required so as to make IEEE 33 node test feeder observable.
- (b)
- in order to maximize SORI, these 11 PMUs should be placed as follows:
- 8 PMUs will be assigned to the primary buses: 2, 8, 11, 14, 17, 21, 24, 32.
- The remaining 3 PMUs are assigned to uncertain buses: 4, 5, 26, 27, 29, 30. There are four optimal placements that can achieve the maximum SORI and full observability of the subnetwork: 5, 27, 30; 5, 27, 29; 5, 26, 29; 4, 26, 29;
4.2. IEEE 34 Node Test Feeder
- (1)
- Minimizing the number of PMUs. Applying Equation (4) yielded the minimum number of PMU required to make the system observable as 12, that is, .
- (2)
- (3)
- Classifying the network buses based on the two solutions obtained from the previous step.
- Primary buses: 2, 4, 10, 12, 17, 21, 23, 25, 28, 31, 33.
- Uncertain buses: 7, 8.
- Trivial buses: 1, 3, 5, 6, 9, 11, 13, 14, 15, 16, 18, 19, 20, 22, 24, 26, 27, 29, 30, 32, 34.
- (4)
- Grouping uncertain buses. As there was only one group, hence only one subnetwork was formed. It consisted of these nodes: 6, 7, 8, 9.
- (5)
- Minimizing the number of PMUs for this subnetwork using Equation (9) gave the minimum number of PMU needed for this subnetwork which equals to one.
- (6)
- Maximizing the SORI for this subnetwork. It was found that two placement strategies can render the subnetwork observable and maximize the measurement redundancy.
- (7)
- In summary, the optimal placements for this network can be obtained following the sub-steps below. The results are tabulated in Table 2 and more information could be obtained as follows:
- (a)
- At least 12 PMUs were needed to make the network observable.
- (b)
- In order to achieve maximized SORI, these 12 PMUs should be placed as follows:
- 11 PMUs should be assigned to the primary buses.
- 1 PMU should be assigned to bus 7 or 8.
4.3. IEEE 123 Node Test Feeder
- (1)
- Minimizing the number of PMUs. Note that at least 45 PMUs are needed to make the entire system observable.
- (2)
- Generate the (in this case ) solutions, out of which there are 5 distinct solutions and the rest are identical.
- (3)
- Classifying of the buses yields the following (the bus number is ignored for simplicity).
- Primary buses: 42 buses.
- Uncertain buses: 7 buses.
- Trivial buses: the rest of the buses (60 buses).
- (4)
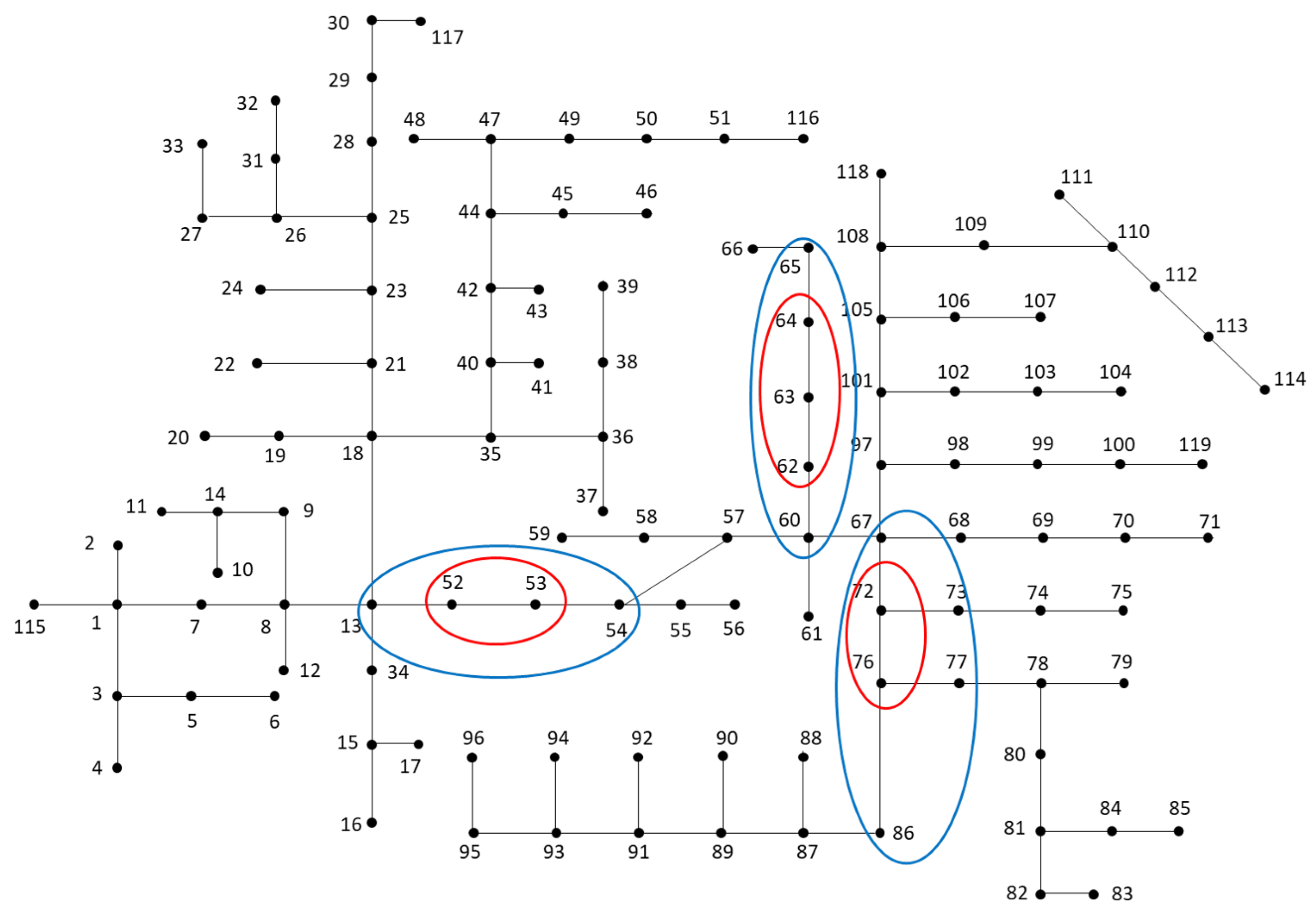
- Grouping the uncertain nodes. There are three independent groups for this network and hence there are three subnetworks.
- (5)
- Optimization for each subnetwork. The minimum number of PMUs and placements that maximize SORI are tabulated in Table 3.
- (6)
- In summary, the optimal placements for this network can be obtained following the sub-steps below. In total there are 12 optimal placements that achieve minimum number of PMU and maximum SORI.
- (a)
- At least 45 PMUs are needed to make the network observable.
- (b)
- In order to achieve maximized SORI, these 45 PMUs should be placed as follows:
- 42 PMUs will be assigned to the primary buses (the bus number are not listed for simplicity).
- 1 PMU will be assigned to any bus between: 52, 53.
- 1 PMU will be assigned to any bus among: 62, 63, 64.
- 1 PMU will be assigned to any bus between: 72, 76.
4.4. Optimization Results Considering Single PMU Loss
4.5. Optimization Results without Considering Single PMU Loss
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Proof of Δ Does Not Affect the Optimal Solutions of OPP
Appendix A.1.1. When the Disturbance Is Positive
Appendix A.1.2. When the Disturbance Is Negative
Appendix A.2. Proof of Set γ = Γ,ξ = Ξ,λ = Λ
Appendix A.2.1. Proof of γ = Γ
Appendix A.2.2. Proof of ξ = Ξ
Appendix A.2.3. Proof of λ = Λ
References
- Baldwin, T.L.; Mili, L.; Boisen, M.B.; Adapa, R. Power system observability with minimal phasor measurement placement. IEEE Trans. Power Syst. 1993, 8, 707–715. [Google Scholar] [CrossRef]
- Manousakis, N.M.; Korres, G.N.; Georgilakis, P.S. Taxonomy of PMU placement methodologies. IEEE Trans. Power Syst. 2012, 27, 1070–1077. [Google Scholar] [CrossRef]
- Xu, B.; Abur, A. Observability analysis and measurement placement for systems with PMUs. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004; Volume 2, pp. 943–946. [Google Scholar]
- Chakrabarti, S.; Kyriakides, E. Optimal placement of phasor measurement units for power system observability. IEEE Trans. Power Syst. 2008, 23, 1433–1440. [Google Scholar] [CrossRef]
- Chakrabarti, S.; Kyriakides, E.; Eliades, D.G. Placement of synchronized measurements for power system observability. IEEE Trans. Power Deliv. 2009, 24, 12–19. [Google Scholar] [CrossRef]
- Milošević, B.; Begović, M. Nondominated sorting genetic algorithm for optimal phasor measurement placement. IEEE Trans. Power Syst. 2003, 18, 69–75. [Google Scholar] [CrossRef]
- Nuqui, R.F.; Phadke, A.G. Phasor measurement unit placement techniques for complete and incomplete observability. IEEE Trans. Power Deliv. 2005, 20, 2381–2388. [Google Scholar] [CrossRef]
- Yuill, W.; Edwards, A.; Chowdhury, S.; Chowdhury, S. Optimal PMU placement: A comprehensive literature review. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011; pp. 1–8. [Google Scholar]
- Manousakis, N.; Korres, G.; Georgilakis, P. Optimal placement of phasor measurement units: A literature review. In Proceedings of the 2011 16th International Conference on Intelligent System Applications to Power Systems, Hersonissos, Greece, 25–28 September 2011; pp. 1–6. [Google Scholar]
- Sodhi, R.; Srivastava, S.; Singh, S. Optimal PMU placement to ensure system observability under contingencies. In Proceedings of the Power Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–6. [Google Scholar]
- Gou, B. Generalized integer linear programming formulation for optimal PMU placement. IEEE Trans. Power Syst. 2008, 23, 1099–1104. [Google Scholar] [CrossRef]
- Gou, B. Optimal placement of PMUs by integer linear programming. IEEE Trans. Power Syst. 2008, 23, 1525–1526. [Google Scholar] [CrossRef]
- Dua, D.; Dambhare, S.; Gajbhiye, R.K.; Soman, S.A. Optimal Multistage Scheduling of PMU Placement: An ILP Approach. IEEE Trans. Power Deliv. 2008, 23, 1812–1820. [Google Scholar] [CrossRef]
- Sun, L.; Chen, T.; Chen, X.; Ho, W.K.; Ling, K.; Tseng, K.; Amaratunga, G.A.J. Optimum Placement of Phasor Measurement Units in Power Systems. IEEE Trans. Instrum. Meas. 2019, 68, 421–429. [Google Scholar] [CrossRef]
- Xia, N.; Gooi, H.B.; Chen, S.; Wang, M. Redundancy based PMU placement in state estimation. Sustain. Energy Grids Netw. 2015, 2, 23–31. [Google Scholar] [CrossRef]
- Maji, T.K.; Acharjee, P. Multiple solutions of optimal PMU placement using exponential binary PSO algorithm for smart grid applications. IEEE Trans. Ind. Appl. 2017, 53, 2550–2559. [Google Scholar] [CrossRef]
- Zhong, J. Phasor measurement unit (PMU) placement optimisation in power transmission network based on hybrid approach. Master’s Thesis, Electrical and Computer Engineering, RMIT University, Melbourne, Australia, 2012. [Google Scholar]
- Zhu, J. Optimal reconfiguration of electrical distribution network using the refined genetic algorithm. Electr. Power Syst. Res. 2002, 62, 37–42. [Google Scholar] [CrossRef]
- Kersting, W.H. Radial distribution test feeders. IEEE Trans. Power Syst. 1991, 6, 975–985. [Google Scholar] [CrossRef]
- Kersting, W. Radial distribution test feeders. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting. Conference Proceedings (Cat. No. 01CH37194), Columbus, OH, USA, 28 January–1 February 2001; Volume 2, pp. 908–912. [Google Scholar]
- Chen, X.; Chen, T.; Tseng, K.; Sun, Y.; Amaratunga, G. Hybrid approach based on global search algorithm for optimal placement of Micro-PMU in distribution networks. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Melbourne, Australia, 28 November–1 December 2016; pp. 559–563. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Min. No. | Location for Placing PMUS | SORI |
|---|---|---|---|
| IEEE 33 | 11 | 2, 8, 11, 14, 17, 21, 24, 32, 4, 26, 29 | 34 |
| 2, 8, 11, 14, 17, 21, 24, 32, 5, 26, 29 | |||
| 2, 8, 11, 14, 17, 21, 24, 32, 5, 27, 29 | |||
| 2, 8, 11, 14, 17, 21, 24, 32, 5, 27, 30 |
| System | Min. No. | Location for Placing PMUs | SORI |
|---|---|---|---|
| IEEE 34 | 12 | 2, 4, 7, 10, 12, 17, 21, 23, 25, 28, 31, 33 | 42 |
| 2, 4, 8, 10, 12, 17, 21, 23, 25, 28, 31, 33 |
| Grouping | Minimum No. of PMU | Solutions that Maximize SORI |
|---|---|---|
| 52, 53 | 1 | 52 or 53 |
| 62, 63, 64 | 1 | 62 or 63 or 64 |
| 72, 76 | 1 | 72 or 76 |
| System | IEEE 33 | IEEE 34 | IEEE 123 |
|---|---|---|---|
| Normal | 11 | 12 | 45 |
| Single PMU loss | 24 | 27 | 97 |
| System | Min. No. | Location for Placing PMUs |
|---|---|---|
| IEEE 34 | 27 | 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;15,26,6,7 |
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;15,26,6,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;15,26,7,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;15,27,6,7 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;15,27,6,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;15,27,7,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;16,26,6,7 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;16,26,6,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;16,26,7,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;16,27,6,7 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;16,27,6,8 | ||
| 1,2,4,5,9,10,12,13,14,17,18,20,21,22,23,24, 25,28,29,31,32,33,34;16,27,7,8 |
| Bus Type | Index | Bus Number | No. of Combination |
|---|---|---|---|
| Primary buses | - | 1,2,3,6,8,10,12,14,16,17,18, 21,22,24,25,32,33 | - |
| Groups | 1 | 19,20 | 2 |
| 2 | 4,5,26,27,28,29,30,31 | 9 |
| Bus Type | Index | Bus Number | No. of Combination |
|---|---|---|---|
| Primary buses | 1,2,3,4,5,6,8,10,11,12,13,14,15,16,17,19,20, | ||
| 21,22,23,24,25,27,30,31,32,33,34,37,38,39, | |||
| 40,41,42,43,45,46,47,48,51,54,55,56,58,59, | |||
| - | 60,61,65,66,67,70,71,72,74,75,76,78,79,81, | - | |
| 82,83,84,85,87,88,89,90,91,92,93,94,95,96, | |||
| 97,100,101,103,104,106,107,108,110,111, | |||
| 113,114,115,116,117,118,119 | |||
| Groups | 1 | 52, 53 | 2 |
| 2 | 28, 29 | 2 | |
| 3 | 49, 50 | 2 | |
| 4 | 62, 63, 64 | 3 | |
| 5 | 68, 69 | 2 | |
| 6 | 98, 99 | 2 |
| Systems | Min. No. of PMU | Max. SORI | No. of Subnetworks | No. of Optimal Placements |
|---|---|---|---|---|
| with Min. PMU | ||||
| IEEE 34 | 12 | 42 | 1 | 2 |
| IEEE 33 | 11 | 34 | 1 | 4 |
| IEEE 123 | 45 | 162 | 3 | 12 |
| Systems | Custom. Exhaustive | ILP | Proposed Hybrid Method | |||
|---|---|---|---|---|---|---|
| NO. of Solutions | Time | No. of Solutions | Time | No. of Solutions | Time | |
| IEEE 34 | 2 | 0.26s | 1 | 0.09s | 2 | 3.61s |
| IEEE 33 | 4 | 62.13s | 1 | 0.09s | 4 | 3.54s |
| IEEE 123 | 12 | > 3 hours | 1 | 0.15s | 12 | 12.77s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Sun, L.; Chen, T.; Sun, Y.; Rusli; Tseng, K.J.; Ling, K.V.; Ho, W.K.; Amaratunga, G.A.J. Full Coverage of Optimal Phasor Measurement Unit Placement Solutions in Distribution Systems Using Integer Linear Programming. Energies 2019, 12, 1552. https://doi.org/10.3390/en12081552
Chen X, Sun L, Chen T, Sun Y, Rusli, Tseng KJ, Ling KV, Ho WK, Amaratunga GAJ. Full Coverage of Optimal Phasor Measurement Unit Placement Solutions in Distribution Systems Using Integer Linear Programming. Energies. 2019; 12(8):1552. https://doi.org/10.3390/en12081552
Chicago/Turabian StyleChen, Xuebing, Lu Sun, Tengpeng Chen, Yuhao Sun, Rusli, King Jet Tseng, Keck Voon Ling, Weng Khuen Ho, and Gehan A. J. Amaratunga. 2019. "Full Coverage of Optimal Phasor Measurement Unit Placement Solutions in Distribution Systems Using Integer Linear Programming" Energies 12, no. 8: 1552. https://doi.org/10.3390/en12081552
APA StyleChen, X., Sun, L., Chen, T., Sun, Y., Rusli, Tseng, K. J., Ling, K. V., Ho, W. K., & Amaratunga, G. A. J. (2019). Full Coverage of Optimal Phasor Measurement Unit Placement Solutions in Distribution Systems Using Integer Linear Programming. Energies, 12(8), 1552. https://doi.org/10.3390/en12081552