Nonlinear Control for Autonomous Trajectory Tracking While Considering Collision Avoidance of UAVs Based on Geometric Relations




Abstract
:1. Introduction
1.1. Related Works
1.2. Main Contributions
1.3. The Organizations
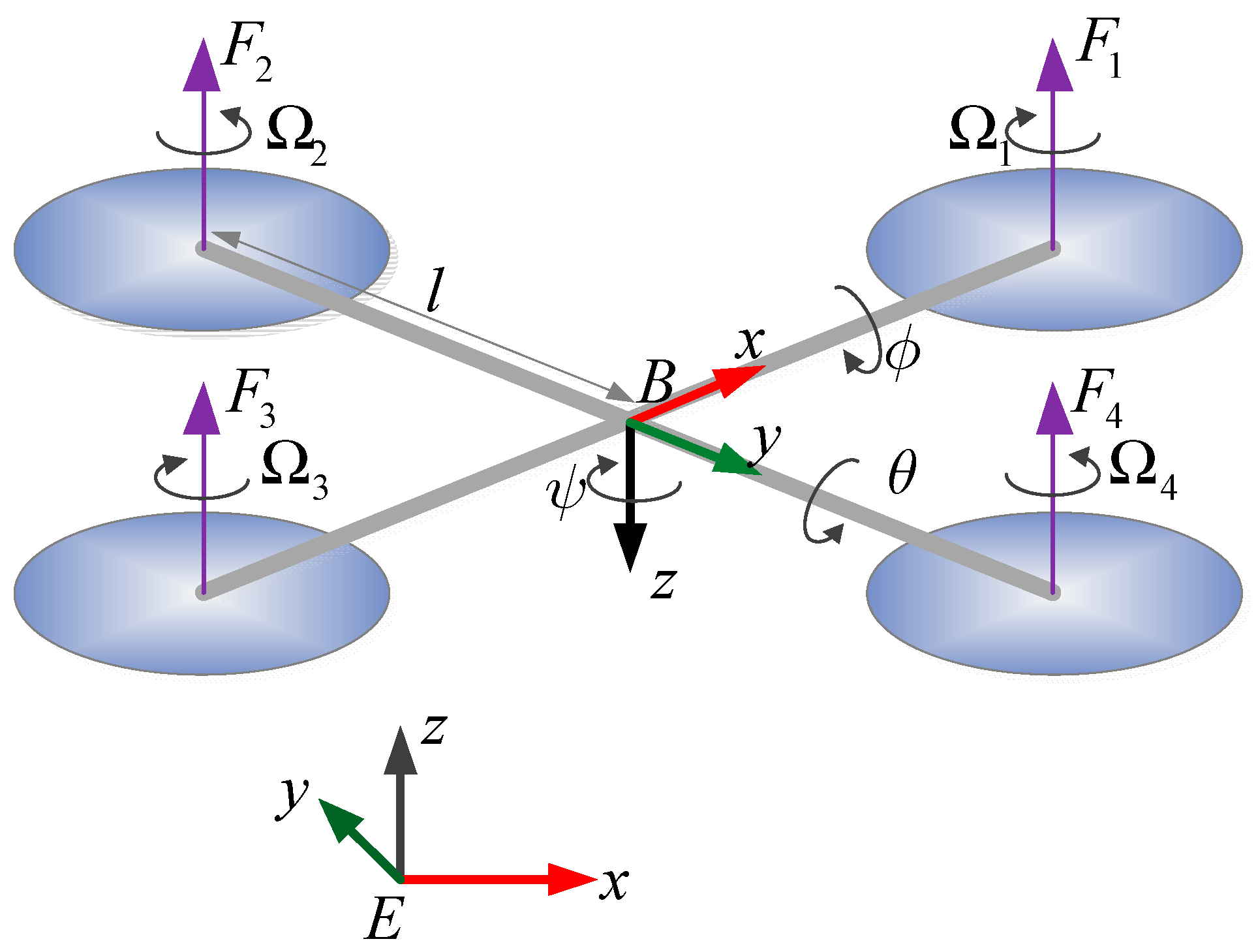
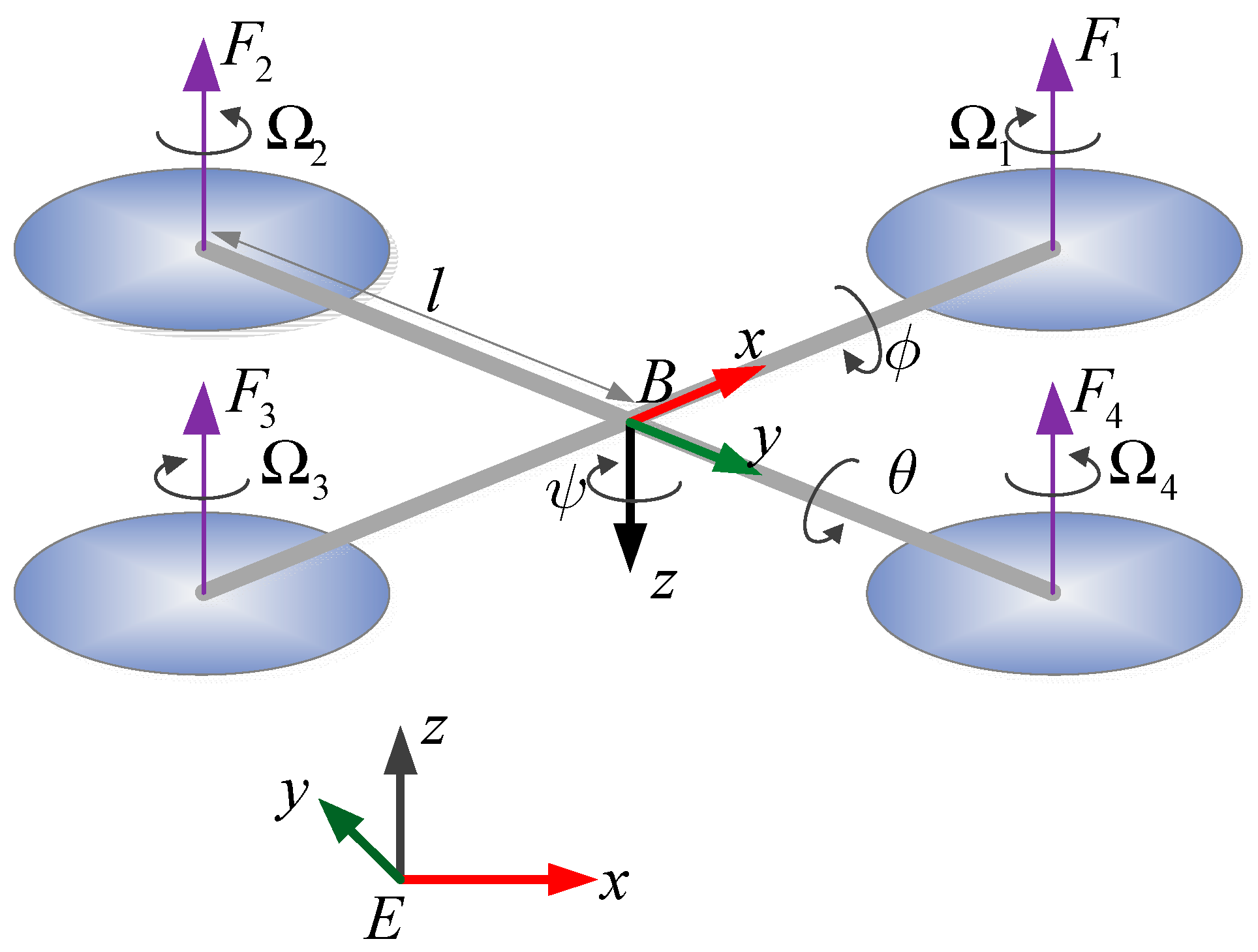
2. Mathematic Model of a Quadcopter
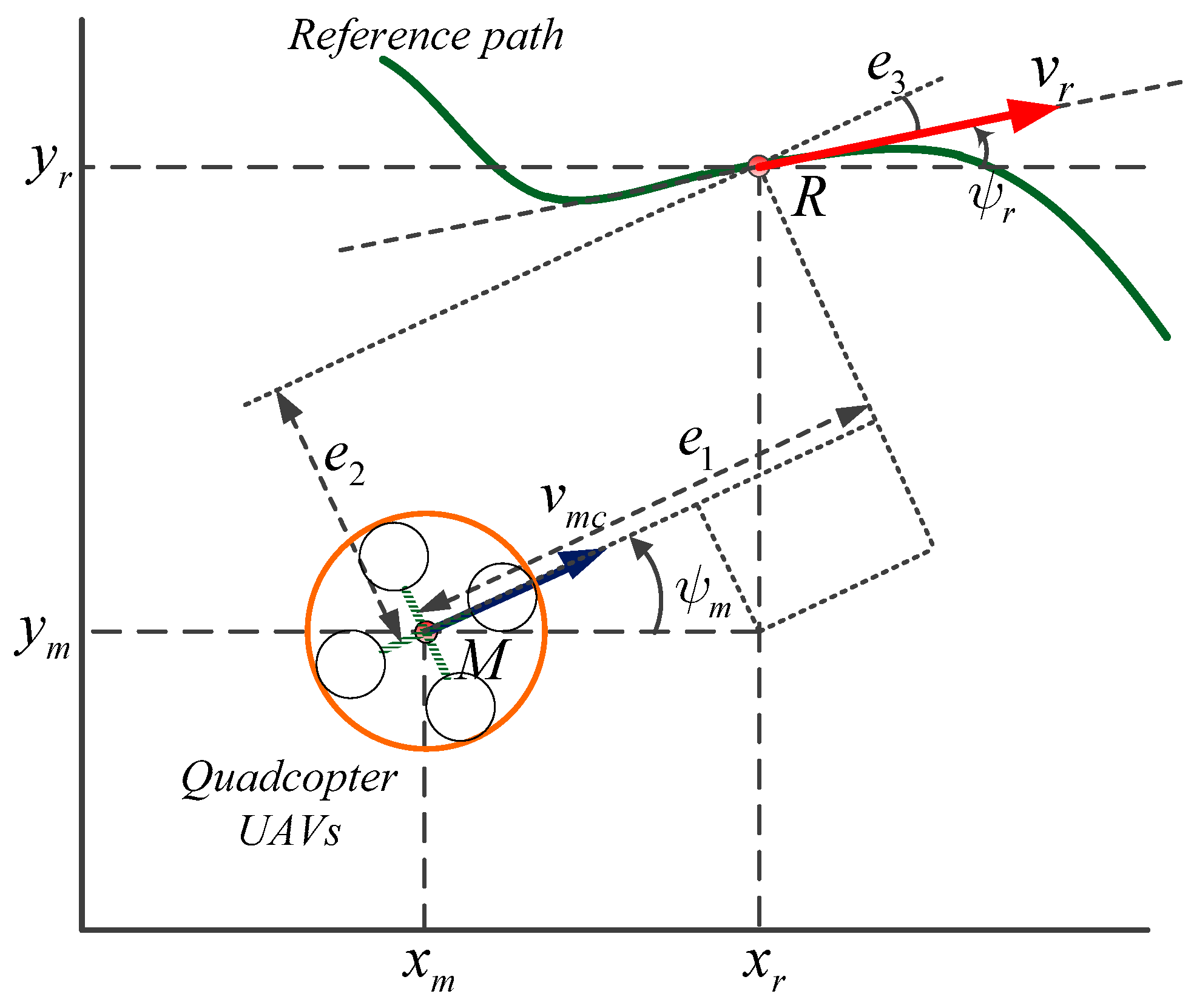
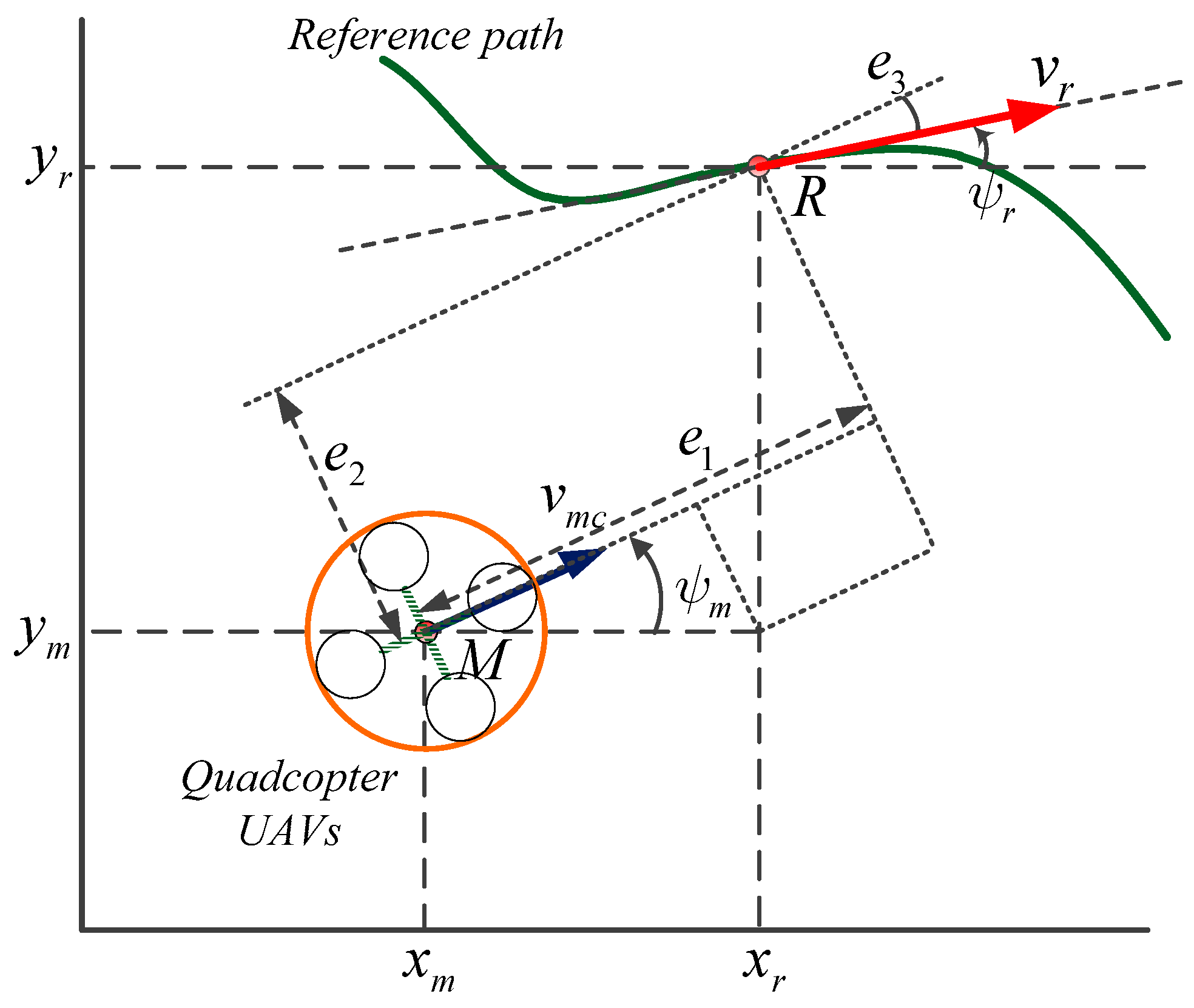
3. Trajectory Tracking Control
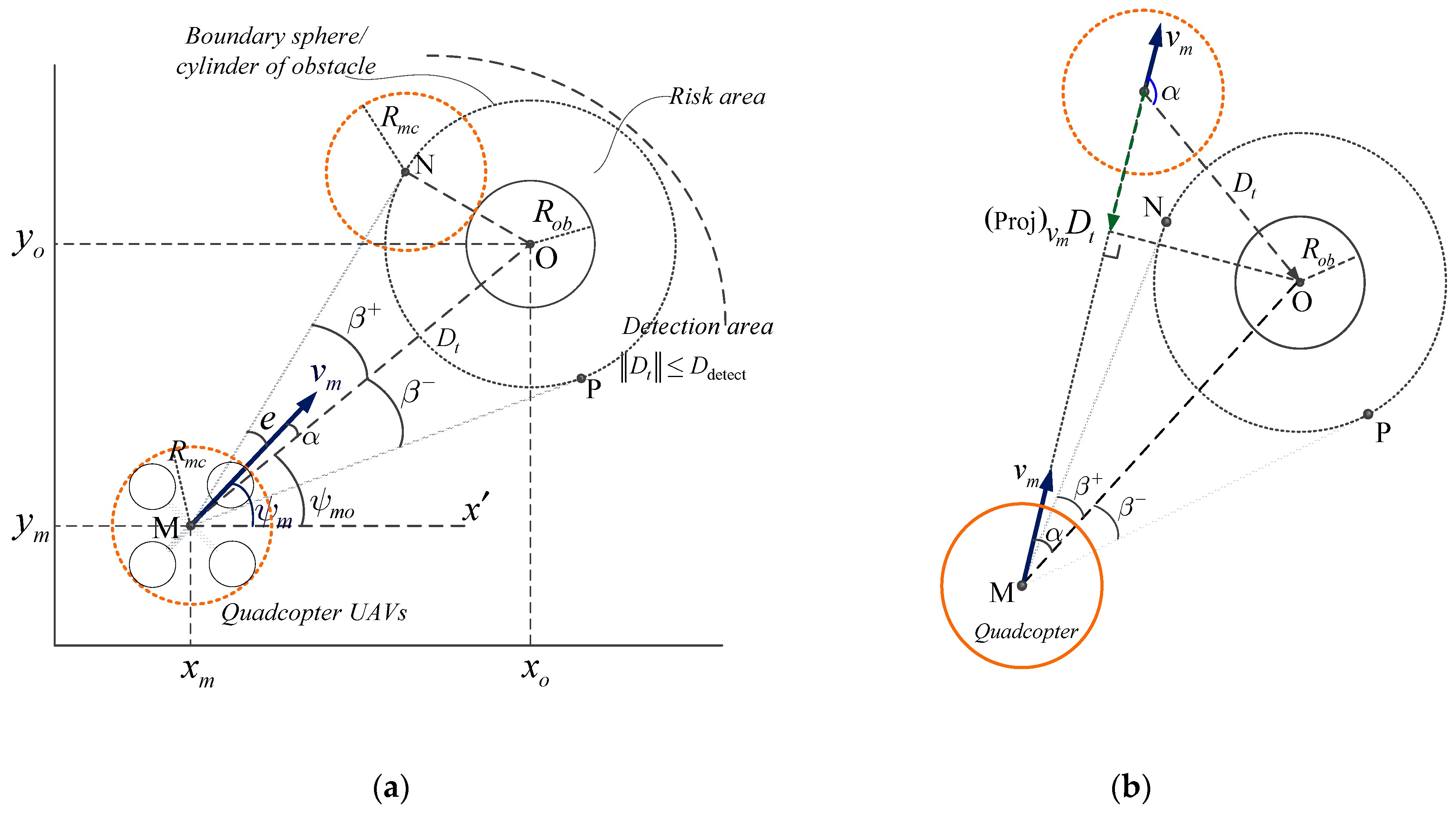
4. Collision Avoidance Control and Movement Strategy
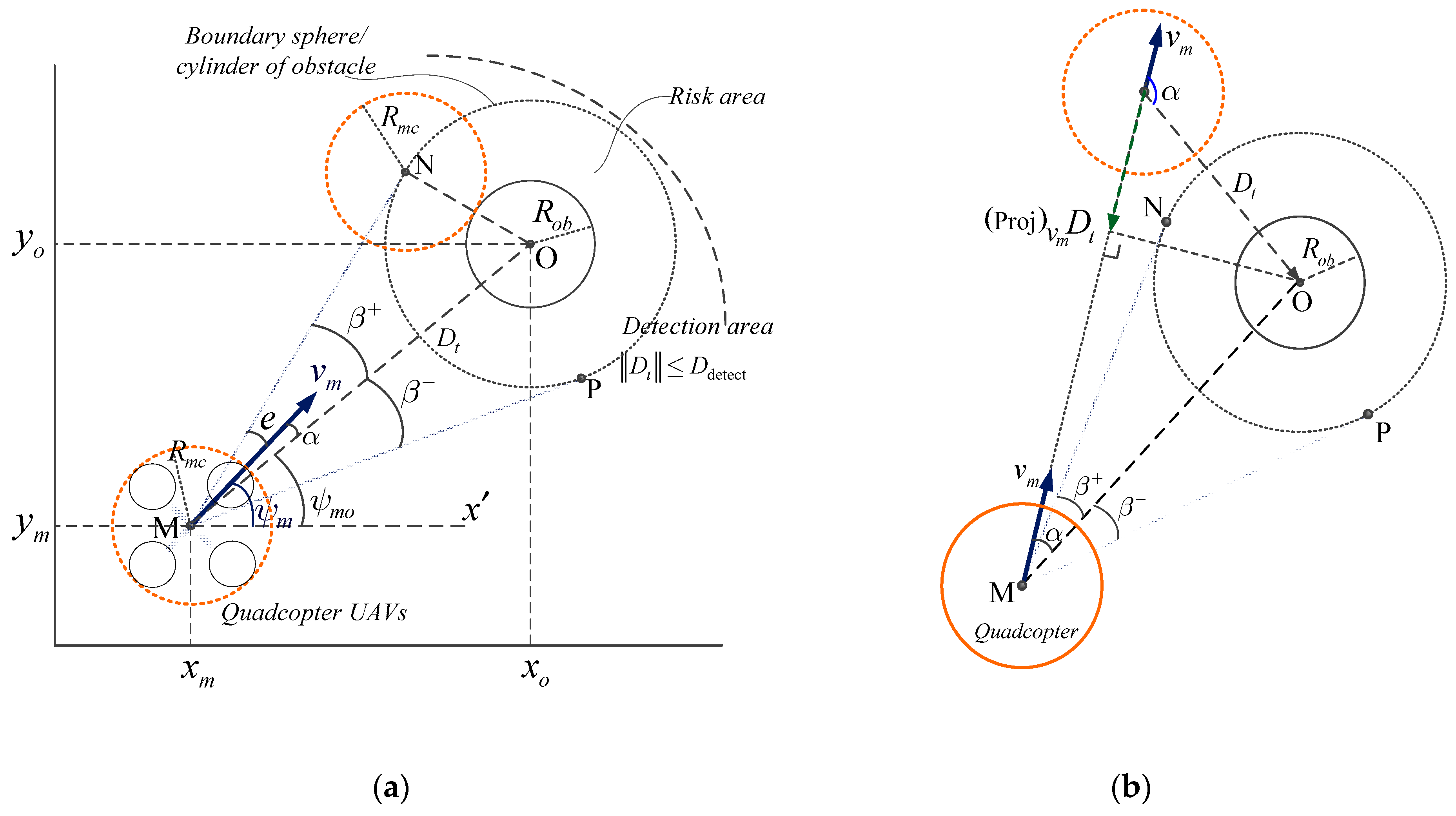
4.1. Statement Problem
4.2. Collision Avoidance Algorithm and Movement Strategy
4.2.1. Collision Avoidance Controller Design
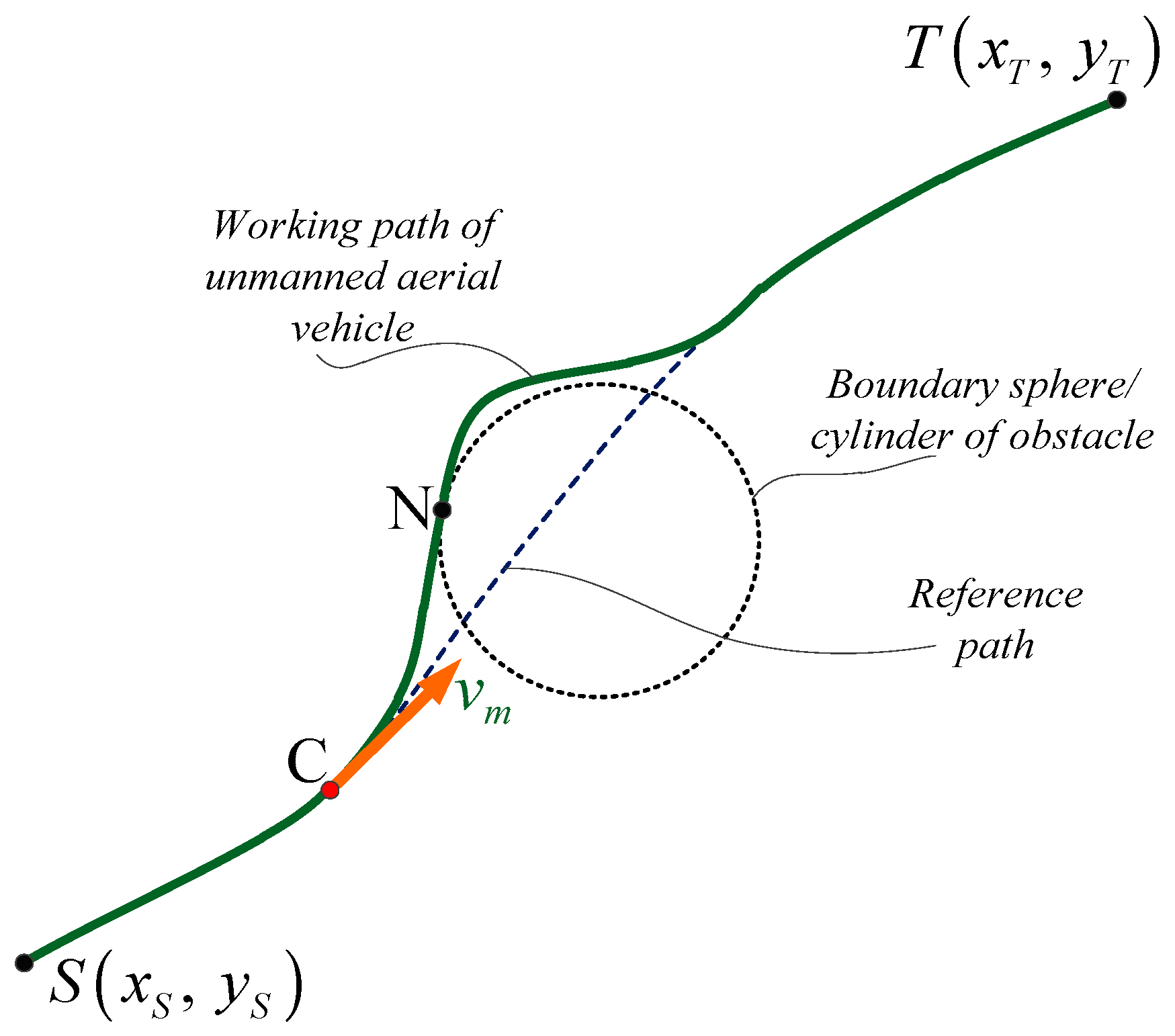
4.2.2. Movement Strategy
4.3. Stability Analysis
5. Simulation Results and Discussions
5.1. Simulation Assumptions
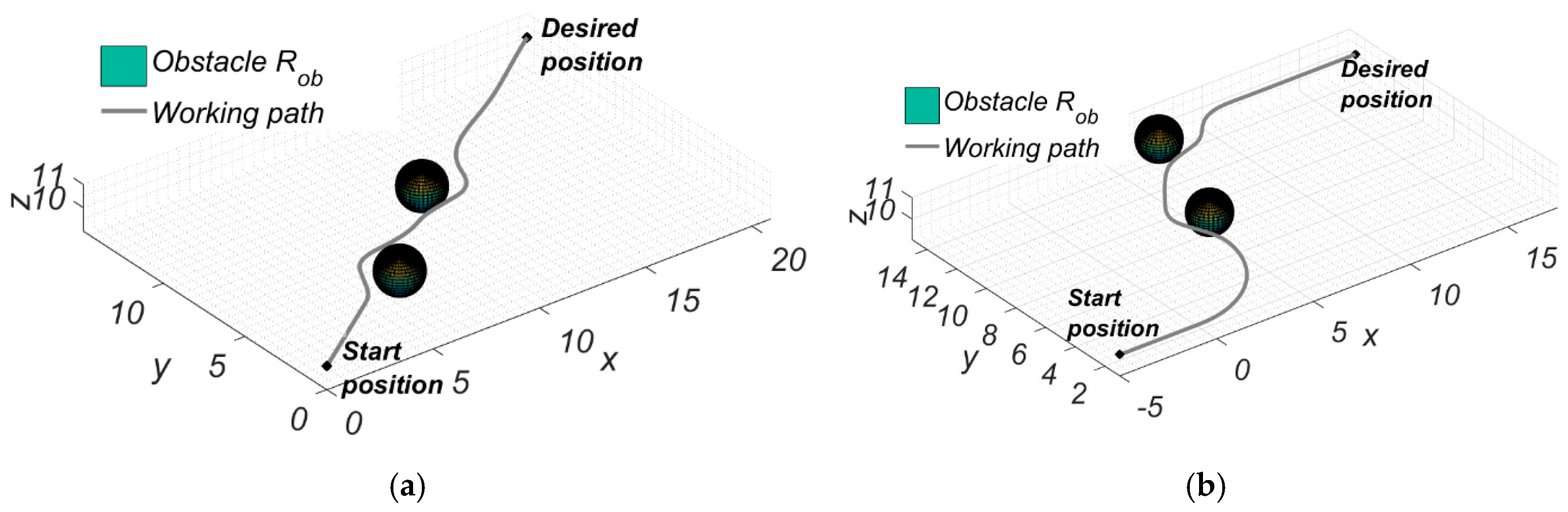
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kamel, B.; Santana, M.C.S.; Thiago, C.D.A. Position estimation of autonomous aerial navigation based on Hough transform and Harris corners detection. In Proceedings of the 9th WSEAS International Conference On Circuits, Systems, Electronics, Control & Signal Processing, Athens, Greece, 29–31 December 2010; pp. 148–153. [Google Scholar]
- Fraundorfer, F.; Heng, L.; Honegger, D.; Lee, G.H.; Meier, L.; Tanskanen, P.; Pollefeys, M. Vision-based autonomous mapping and exploration using a quadrotor MAV. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Algarve, Portugal, 7–12 October 2012; pp. 4557–4564. [Google Scholar]
- Erdos, D.; Erdos, A.; Watkins, S.E. An experimental UAV system for search and rescue challenge. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 32–37. [Google Scholar] [CrossRef]
- Suprapto, B.Y.; Heryanto, M.A.; Suprijono, H.; Muliadi, J.; Kusumoputro, B. Design and development of heavy-lift hexacopter for heavy payload. In Proceedings of the 2017 IEEE International Seminar on Application for Technology of Information and communication (iSemantic), Semarang, Indonesia, 7–8 October 2017; pp. 242–247. [Google Scholar]
- Meivel, S.; Maguteeswaran, R.; Gandhiraj, N.; Govindarajan, S. Quadcopter UAV based fertilizer and pesticide spraying system. J. Eng. Sci. 2016, 1, 8–12. [Google Scholar]
- Sadhana, B.; Naik, G.; Mythri, R.J.; Hedge, P.G.; Shyama, K.S.B. Development of quad copter based pesticide spraying mechanism for agricultural applications. Int. J. Innov. Res. Electr. Electron. Instrum. Control Eng. 2017, 5, 121–123. [Google Scholar]
- Misbah Rehman, Z.; Kavya, B.; Mehta, D.; Kumar, P.R.; Sunil Kumar, G.R. Quadcopter for pesticide spraying. Int. J. Sci. Eng. Res. 2016, 7, 238–240. [Google Scholar]
- Ma’sum, M.A.; Arrofi, M.K.; Jati, G.; Arifin, F.; Kurniawan, M.N.; Mursanto, P.; Jatmiko, W. Simulation of intelligent unmanned aerial vehicle (uav) for military surveillance. In Proceedings of the 2013 IEEE International Conference on Advanced Computer Science and Information Systems (ICACSIS), Kuta, Bali, 28–29 September 2013; pp. 161–166. [Google Scholar]
- Udeanu, G.; Dobrescu, A.; Oltean, M. Unmanned aerial vehicle in military operations. Sci. Res. Educ. Air Force 2016, 1, 199–205. [Google Scholar] [CrossRef]
- Oh, P.Y.; Green, W.E.; Barrows, G. Neural nets and optic flow for autonomous micro-air-vehicle navigation. In Proceedings of the ASME 2004 International Mechanical Engineering Congress and Exposition, Anaheim, CA, USA, 13–19 November 2004; pp. 1279–1285. [Google Scholar]
- Zufferey, J.C.; Floreano, D. Fly-inspired visual steering of an ultralight indoor aircraft. IEEE Trans. Robot. 2006, 22, 137–146. [Google Scholar] [CrossRef]
- Hrabar, S.; Sukhatme, G.; Corke, P.; Usher, K.; Roberts, J. Combined optic-flow and stereo-based navigation of urban canyons for a UAV. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 3309–3316. [Google Scholar]
- Wang, C.; Liu, W.; Meng, M.Q.H. Obstacle avoidance for quadrotor using improved method based on optical flow. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 1674–1679. [Google Scholar]
- Gageik, N.; Paul, B.; Montenegro, S. Obstacle detection and collision avoidance for a UAV with complementary low-cost sensors. IEEE Access 2015, 3, 599–609. [Google Scholar] [CrossRef]
- Gosiewski, Z.; Cieśluk, J.; Ambroziak, L. Vision-based obstacle avoidance for unmanned aerial vehicles. In Proceeding of the 2011 4th IEEE International Congress on Image and Signal Processing, Shanghai, China, 15–17 October 2011; Volume 4, pp. 2020–2025. [Google Scholar]
- Gao, P.; Zhang, D.; Fang, D.; Jin, S. Obstacle avoidance for micro quadcopter based on optical flow. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 4033–4037. [Google Scholar]
- Fasano, G.; Accardo, D.; Moccia, A.; Carbone, G.; Ciniglio, U.; Corraro, F.; Luongo, S. Multisensor-based fully autonomous non-cooperative collision avoidance system for unmanned air vehicles. J. Aerosp. Comput. Inf. Commun. 2008, 5, 338–360. [Google Scholar] [CrossRef]
- Al-Kaff, A.; García, F.; Martin, D.; De, L.E.A.; Armingol, J.M. Obstacle detection and avoidance system based on monocular camera and size expansion algorithm for UAVs. Sensors 2017, 17, 1061. [Google Scholar] [CrossRef]
- Aguilar, W.G.; Casaliglla, P.; Pólit, J.L. Obstacle avoidance based-visual navigation for micro aerial vehicles. Electronics 2017, 6, 10. [Google Scholar] [CrossRef]
- Celik, K.; Chung, S.J.; Clausman, M.; Somani, A.K. Monocular vision SLAM for indoor aerial vehicles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1566–1573. [Google Scholar]
- Zhao, C.; Jiang, S. Aerial target detection and avoidance for uav based on stereo vision. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1670–1675. [Google Scholar]
- Lyu, Y.; Pan, Q.; Zhao, C.; Zhang, Y.; Hu, J. Vision-based UAV collision avoidance with 2D dynamic safety envelope. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 16–26. [Google Scholar] [CrossRef]
- Hu, J.; Niu, Y.; Wang, Z. Obstacle avoidance methods for rotor UAVs using realsense camera. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 7151–7155. [Google Scholar]
- Chen, H.; Chang, K.; Agate, C.S. UAV path planning with tangent-plus-Lyapunov vector field guidance and obstacle avoidance. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 840–856. [Google Scholar] [CrossRef]
- Sun, J.; Tang, J.; Lao, S. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm. IEEE Access 2017, 5, 18382–18390. [Google Scholar] [CrossRef]
- Budiyanto, A.; Cahyadi, A.; Adji, T.B.; Wahyunggoro, O. UAV obstacle avoidance using potential field under dynamic environment. In Proceedings of the 2015 IEEE International Conference on Control, Electronics, Renewable Energy and Communications (ICCEREC), Bandung, Indonesia, 27–29 August 2015; pp. 187–192. [Google Scholar]
- Lin, Y.; Saripalli, S. Collision avoidance for UAVs using reachable sets. In Proceedings of the 2015 IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 226–235. [Google Scholar]
- Dai, L.; Cao, Q.; Xia, Y.; Gao, Y. Distributed mpc for formation of multi-agent systems with collision avoidance and obstacle avoidance. J. Frankl. Inst. 2017, 354, 2068–2085. [Google Scholar] [CrossRef]
- Xiaohua, W.; Vivek, Y.; Balakrishnan, S.N. Cooperative uav formation flying with obstacle/collision avoidance. IEEE Trans. Control Syst. Technol. 2007, 15, 672–679. [Google Scholar]
- Lin, Y.; Saripalli, S. Sampling-Based Path Planning for UAV Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3179–3192. [Google Scholar] [CrossRef]
- Rubio, J.J.; Garcia, E.; Pacheco, J. Trajectory planning and collisions detector for robotic arms. Neural Comput. Appl. 2012, 21, 2105–2114. [Google Scholar] [CrossRef]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. Man Cybern. 1998, 28, 562–574. [Google Scholar] [CrossRef]
- Wang, C.; Savkin, A.V.; Garratt, M. A strategy for safe 3D navigation of non-holonomic robots among moving obstacles. Robotica 2018, 36, 275–297. [Google Scholar] [CrossRef]
- Seo, J.; Kim, Y.; Kim, S.; Tsourdos, A. Collision avoidance strategies for unmanned aerial vehicles in formation flight. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2718–2734. [Google Scholar] [CrossRef]
- Tang, J.; Fan, L.; Lao, S. Collision avoidance for Multi-UAV based on geometric optimization model in 3D airspace. Arab. J. Sci. Eng. 2014, 39, 8409–8416. [Google Scholar] [CrossRef]
- Shin, H.S.; Tsourdos, A.; White, B. UAS conflict detection and resolution using differential geometry concepts. In Sense and Avoid in UAS: Research and Applications, 1st ed.; Angelov, P., Ed.; Aerospace Series; John Wiley & Sons Inc.: Chichester, West Sussex, UK, 2012; Chapter 7; pp. 175–204. [Google Scholar]
- White, B.A.; Shin, H.S.; Tsourdos, A. UAV obstacle avoidance using differential geometry concepts. In Proceedings of the IFAC World Congress 2011, Milan, Italy, 28 August–2 September 2011; pp. 6325–6330. [Google Scholar]
- Anusha, M.; Padhi, R. Reactive collision avoidance using nonlinear geometric and differential geometric guidance. J. Guidance Control Dyn. 2011, 34, 303–310. [Google Scholar]
- Kang, Y.; Hedrick, J.K. Linear tracking for a fixed-wing UAV using nonlinear model predictive control. IEEE Trans. Control Syst. Technol. 2009, 17, 1202–1210. [Google Scholar] [CrossRef]
- Ru, P.; Subbarao, K. Nonlinear model predictive control for unmanned aerial vehicles. Aerospace 2017, 4, 31. [Google Scholar] [CrossRef]
- Nathan, S.; Jason, K.; Mark, C. Nonlinear model predictive control technique for unmanned air vehicles. J. Guidance Control Dyn. 2006, 29, 1179–1188. [Google Scholar]
- Bo, Z.; Bin, X.; Zhang, Y.; Zhang, X. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology. IEEE Trans. Ind. Electron. 2015, 62, 2891–2902. [Google Scholar]
- Sharifi, M.; Hassan, S. Nonlinear robust adaptive Cartesian impedance control of UAVs equipped with a robot manipulator. J. Adv. Robot. 2015, 29, 171–186. [Google Scholar] [CrossRef]
- Celine, T.; Eric, M.; Laurent, E. 3-D model-based tracking for UAV indoor localization. IEEE Trans. Cybern. 2015, 45, 869–879. [Google Scholar]
- Wu, Y.; Sui, Y.; Wang, G. Vision-based real-time aerial object localization and tracking for UAV sensing system. IEEE Access 2017, 5, 23969–23978. [Google Scholar] [CrossRef]
- Xiong, J.J.; Zheng, E.H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 725–731. [Google Scholar] [CrossRef] [PubMed]
- Chwa, D. Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates. IEEE Trans. Control Syst. Technol. 2004, 12, 637–644. [Google Scholar] [CrossRef]
- Fang, Y.; Fei, J.; Hu, T. Adaptive backstepping fuzzy sliding mode vibration control of flexible structure. J. Low Freq. Noise Vib. Act. Control 2018, 37, 1079–1096. [Google Scholar] [CrossRef]
- Fei, J.; Liang, X. Adaptive Backstepping Fuzzy-Neural-Network Fractional Order Control of Microgyroscope Using Nonsingular Terminal Sliding Mode Controller. Complexity 2018, 2018, 5246074. [Google Scholar] [CrossRef]
- Fei, J.; Lu, C. Adaptive fractional order sliding mode controller with neural estimator. J. Frankl. Inst. 2018, 355, 2369–2391. [Google Scholar] [CrossRef]
- Lee, J.K.; Choi, Y.H.; Park, J.B. Sliding mode tracking control of mobile robots with approach angle in Cartesian coordinates. Int. J. Control Autom. Syst. 2015, 13, 718–724. [Google Scholar] [CrossRef]
- Erick, J.R.; Tang, C.; Mark, W.P.; Dusan, M.S. Trajectory tracking with collision avoidance for nonholonomic vehicles with acceleration constraints and limited sensing. Int. J. Robot. Res. 2014, 33, 1569–1592. [Google Scholar]
- Milton, C.P.S.; Claudio, D.R.; Mario, S.F.; Ricardo, C. A novel null-space-based UAV trajectory tracking controller with collision avoidance. IEEE/ASME Trans. Mechatron. 2017, 22, 2543–2553. [Google Scholar]
- Mastellone, S.; Stipanović, D.M.; Graunke, C.R.; Intlekofer, K.A.; Spong, M.W. Formation control and collision avoidance for multi-agent non-holonomic systems: Theory and experiments. Int. J. Robot. Res. 2008, 27, 107–126. [Google Scholar] [CrossRef]
- Cui, M.; Sun, D.; Liu, W.; Zhao, M.; Liao, X. Adaptive tracking and obstacle avoidance control for mobile robots with unknown sliding. Int. J. Adv. Robot. Syst. 2012, 9, 1. [Google Scholar] [CrossRef]
- Dong, W.; Gu, G.Y.; Zhu, X.; Ding, H. Modeling and control of a quadrotor UAV with aerodynamic concepts. Int. J. Mech. Aerosp. Ind. Mechatron. Manuf. Eng. 2013, 7, 901–906. [Google Scholar]
- Bolandi, H.; Rezaei, M.; Mohsenipour, R.; Hossein, N.; Smailzadeh, S.M. Attitude control of a quadrotor with optimized PID controller. Intell. Control Autom. 2013, 4, 335–342. [Google Scholar] [CrossRef]
- Okazaki, H.; Isogai, K.; Nakano, H. Modeling and simulation of motion of a quadcopter in a light wind. In Proceedings of the 2016 IEEE 59th International Midwest Symposium on Circuits and Systems (MWSCAS), Abu Dhabi, UAE, 16–19 October 2016. [Google Scholar]
- Tengis, T.; Batmunkh, A. State feedback control simulation of quadcopter model. In Proceedings of the 2016 IEEE 11th International Forum on Strategic Technology (IFOST): Robotics and Automation, Novosibirsk, Rusia, 1–3 June 2016; pp. 553–557. [Google Scholar]
- Geng, Q.; Shuai, H.; Hu, Q. Obstacle avoidance approaches for quadrotor UAV based on backstepping technique. In Proceedings of the 25th Control Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 3613–3617. [Google Scholar]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quadrotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Nadda, S.; Swarup, A. On adaptive sliding mode control for improved quadrotor tracking. J. Vib. Control 2017, 24, 3219–3230. [Google Scholar] [CrossRef]
- Khebbache, H.; Tadjine, M. Robust fuzzy backstepping sliding mode controller for a quadrotor unmanned aerial vehicle. J. Control Eng. Appl. Inform. 2013, 15, 3–11. [Google Scholar]
- Thanh, H.L.N.N.; Hong, S.K. Completion of collision avoidance control algorithm for multicopters based on geometrical constrains. IEEE Access 2018, 6, 27111–27125. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Phi, N.N.; Hong, S.K. Simple nonlinear control of quadcopter for collision avoidance based on geometric approach in static environment. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Quadcopter robust adaptive second order sliding mode control based on PID sliding surface. IEEE Access 2018, 6, 66850–66860. [Google Scholar] [CrossRef]
- Hu, B.; Lu, L.; Mishra, S. A control architecture for time-optimal landing of a quadrotor onto a moving platform. Asian J. Control 2018, 20, 1701–1712. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Descriptions | Value and Unit |
|---|---|---|
| Rmc | Radius of quadcopter (including propeller) | 0.35 m |
| m | Total mass of quadcopter | 1.12 kg |
| Ixx | Moment of inertia along x-axis | 0.0119 kg.m2 |
| Iyy | Moment of inertia along y-axis | 0.0119 kg.m2 |
| Izz | Moment of inertia along z-axis | 0.0223 kg.m2 |
| g | Gravitational acceleration | 9.81 N/m2 |
| Rob | Radius of obstacle | 1 m |
| b | Thrust coefficient | 7.73213 (10−6) |
| d | Drag coefficient | 1.27513 (10−7) |
| Ddetect | Detection radius of sensor | 5 m |
| Dactive | Distance of activating the collision avoidance algorithm | 3 m |
| Symbol | Descriptions | Value and Unit |
|---|---|---|
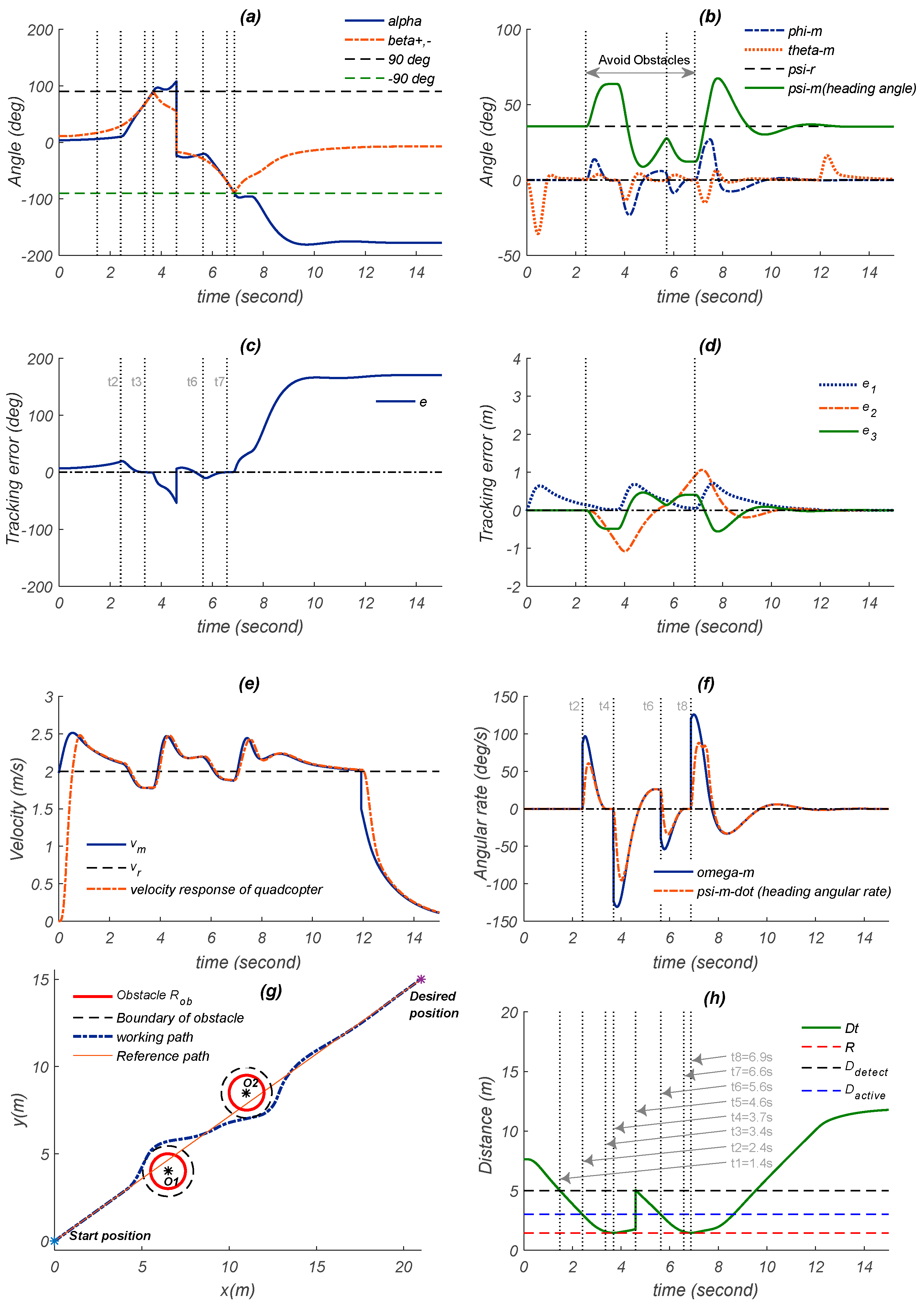
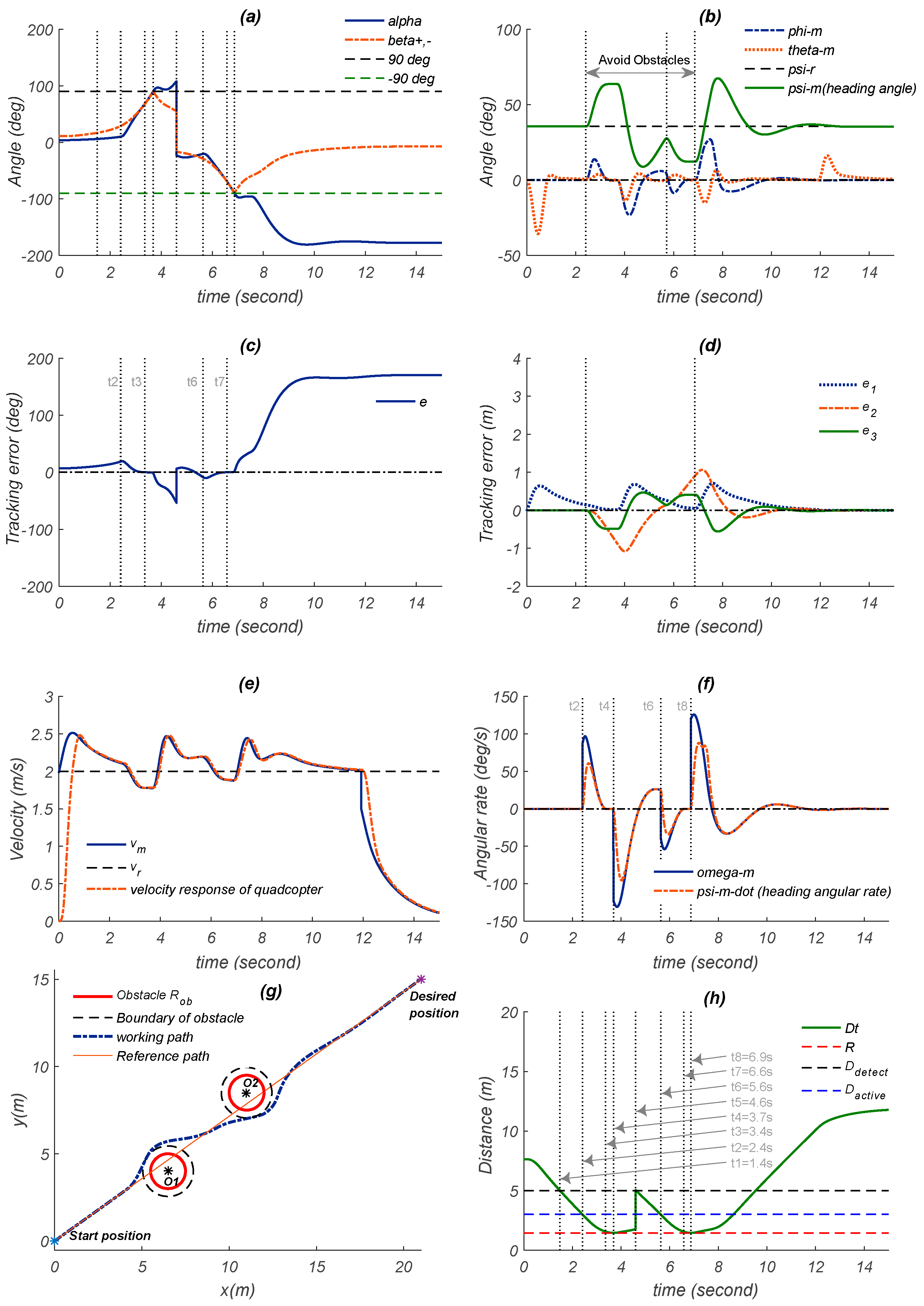
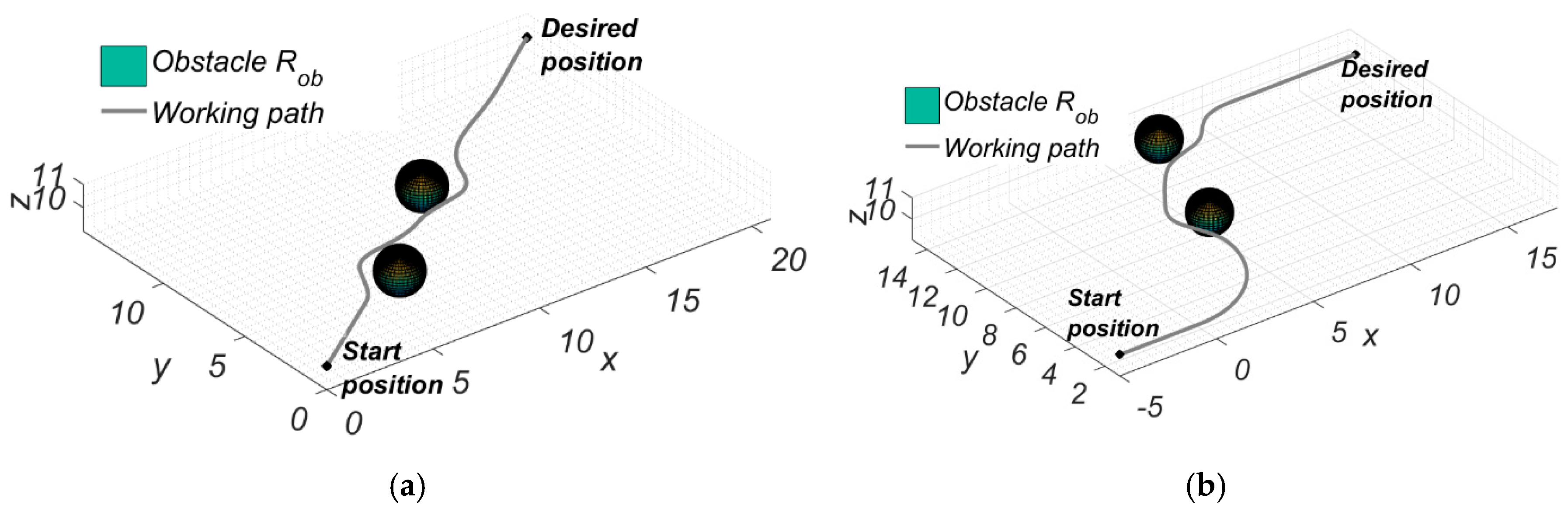
| S | Start position | (0, 0) |
| T | Desired position | T (21, 15) |
| vr | Reference velocity | 2 m/s |
| wr | Reference angular rate | 0 rad/s |
| O1,O2 | Obstacle positions | O1 (6.5, 4), O2 (11, 8.5) |
| k1, k2, k3 | Position tracking controller gains | 0.8, 1.2, 1.8 |
| k | Collision avoidance controller gain | 10 |
| Symbol | Descriptions | Value and Unit |
|---|---|---|
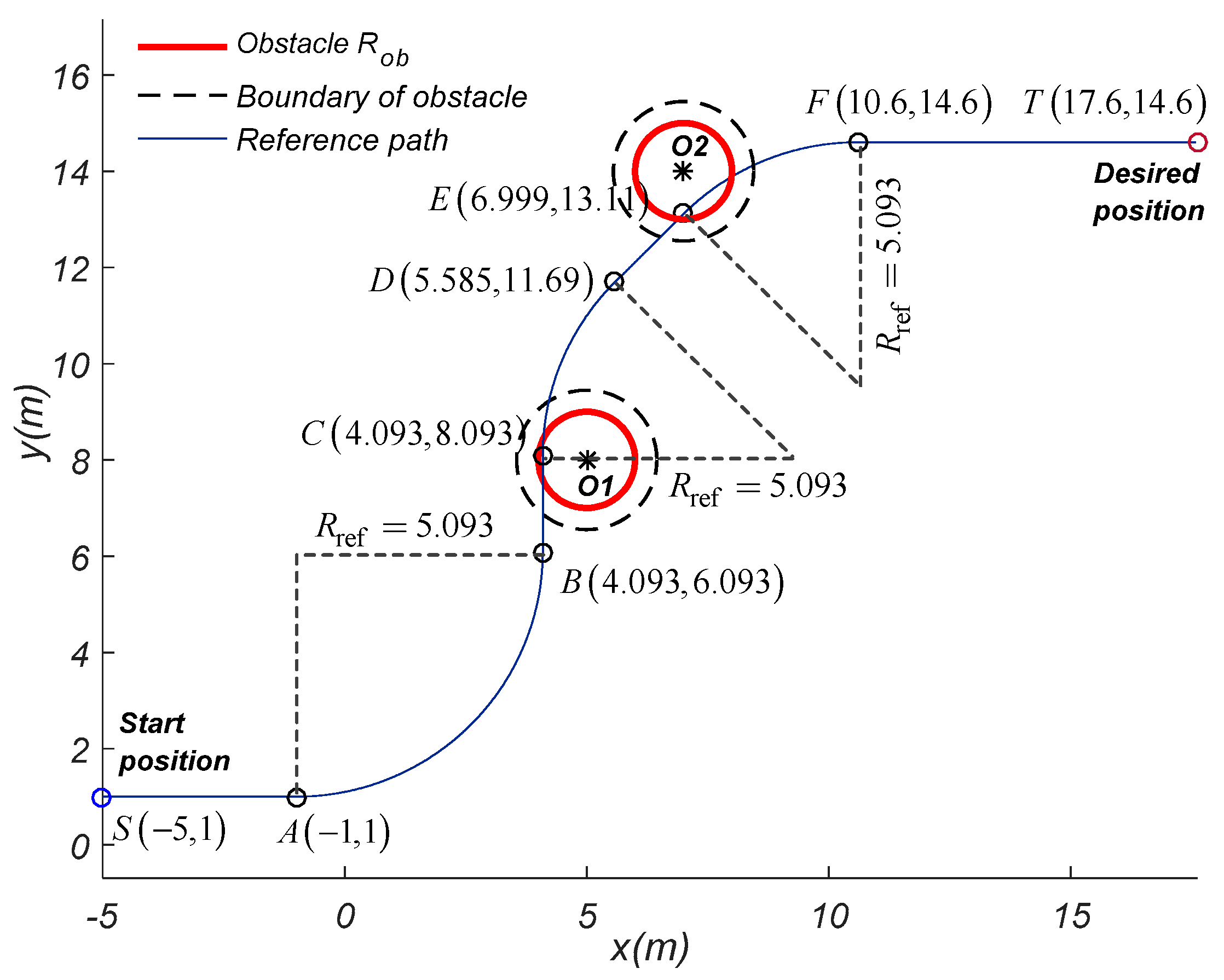
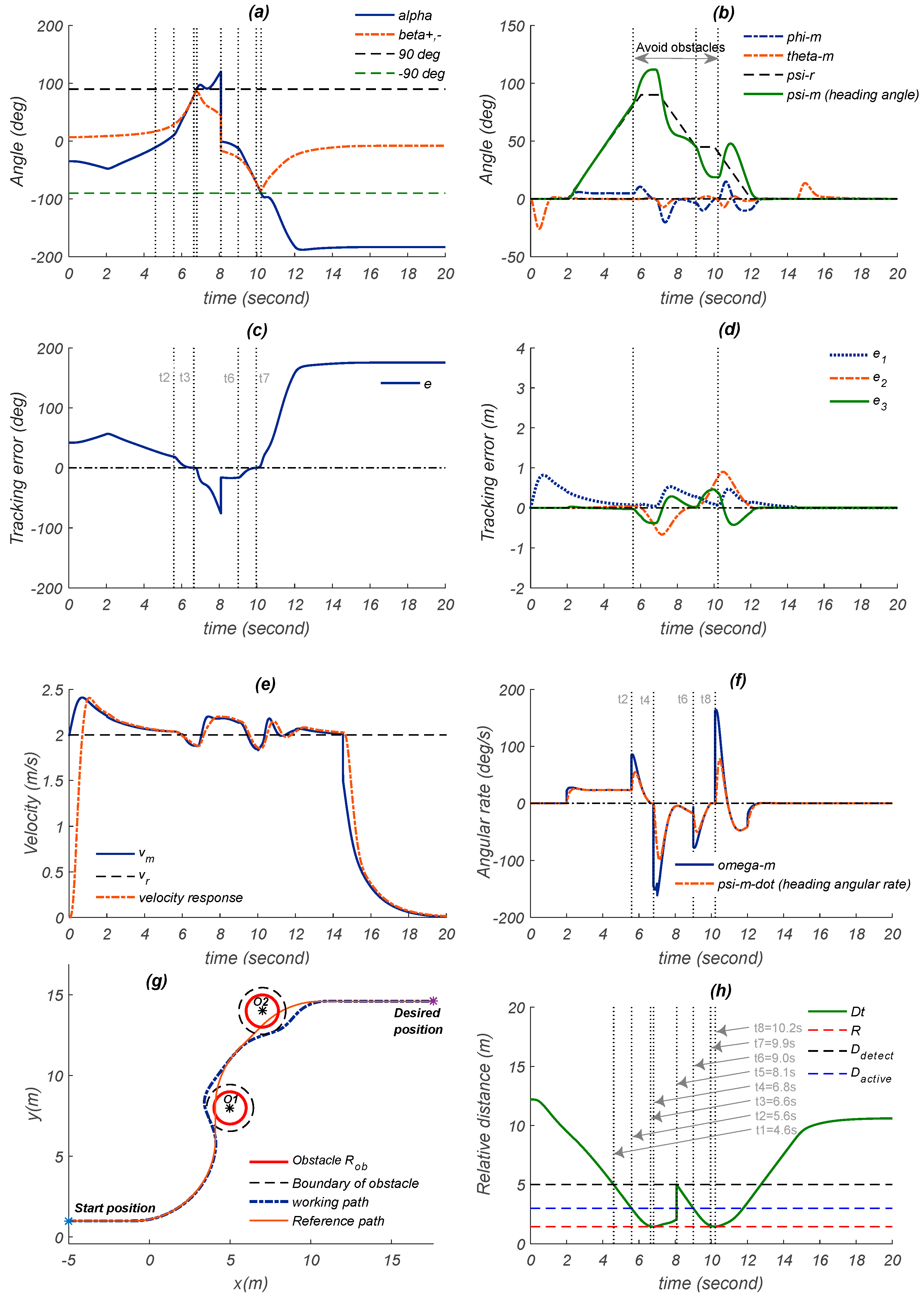
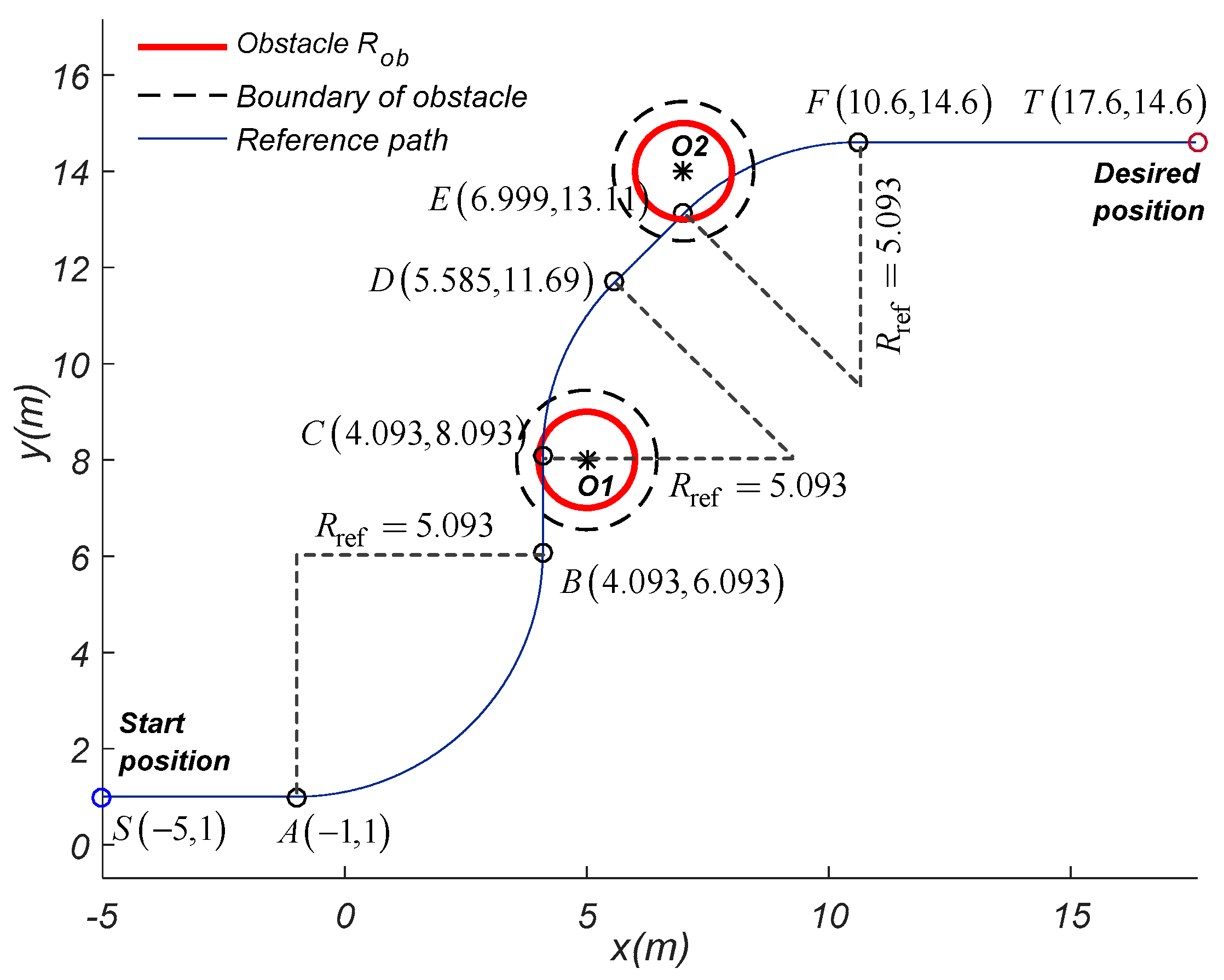
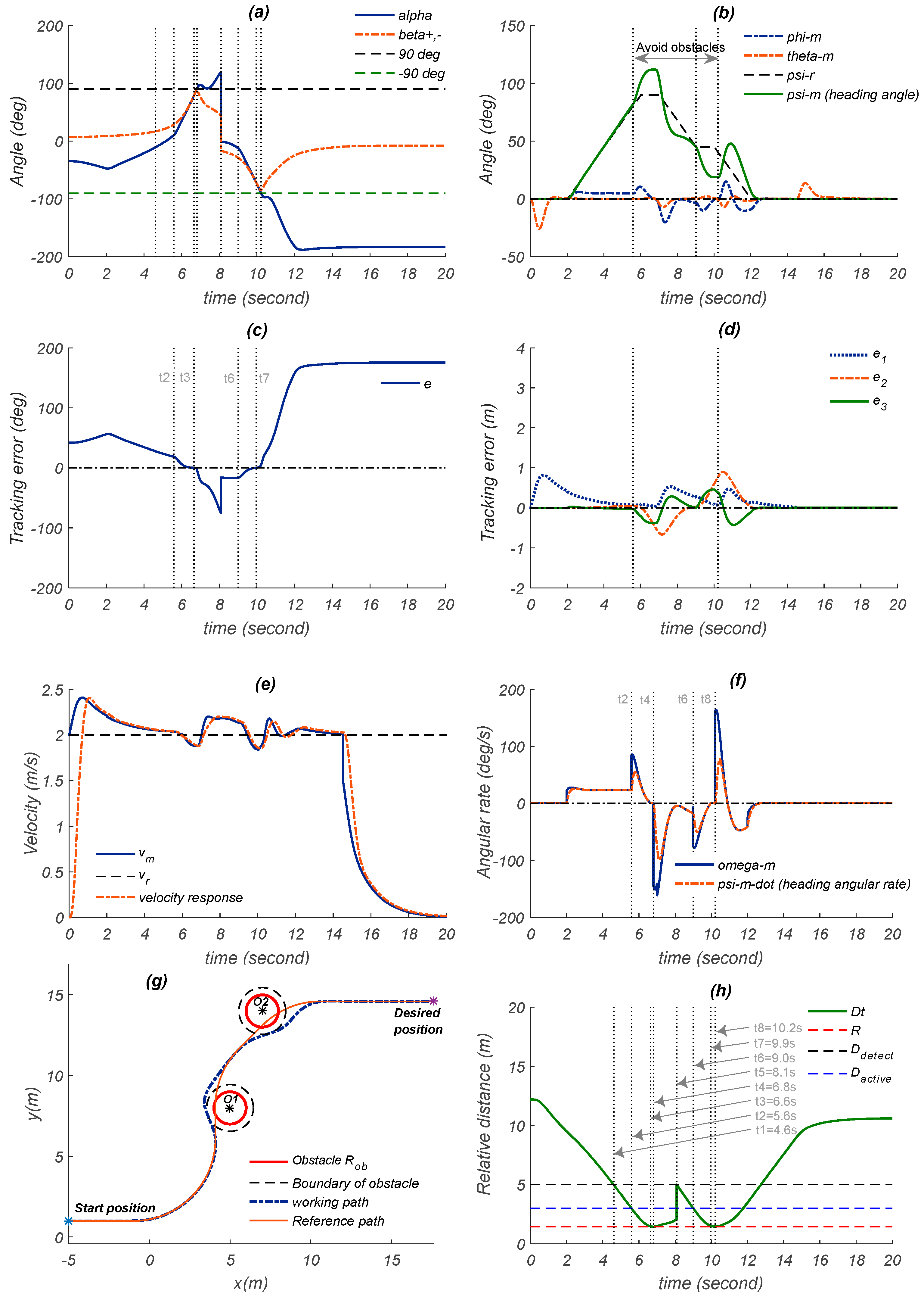
| S | Start position | (−5, 1) |
| T | Desired position | (17.6, 14.6) |
| vr | Reference velocity | 2 m/s |
| wr | Reference angular rate in SA, BC, DE, FT (as Figure 6) | 0 rad/s |
| Reference angular rate in AB, CD, EF (as Figure 6) | rad/s | |
| O | Obstacle positions | O1 (5, 8), O2 (7, 14) |
| k1, k2, k3 | Position tracking controller gains | 0.5, 0.8, 2.8 |
| k | Collision avoidance controller gain | 10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, L.N.N.T.; Bui, D.H.P.; Hong, S.K. Nonlinear Control for Autonomous Trajectory Tracking While Considering Collision Avoidance of UAVs Based on Geometric Relations. Energies 2019, 12, 1551. https://doi.org/10.3390/en12081551
Ha LNNT, Bui DHP, Hong SK. Nonlinear Control for Autonomous Trajectory Tracking While Considering Collision Avoidance of UAVs Based on Geometric Relations. Energies. 2019; 12(8):1551. https://doi.org/10.3390/en12081551
Chicago/Turabian StyleHa, Le Nhu Ngoc Thanh, Duc Hong Phuc Bui, and Sung Kyung Hong. 2019. "Nonlinear Control for Autonomous Trajectory Tracking While Considering Collision Avoidance of UAVs Based on Geometric Relations" Energies 12, no. 8: 1551. https://doi.org/10.3390/en12081551
APA StyleHa, L. N. N. T., Bui, D. H. P., & Hong, S. K. (2019). Nonlinear Control for Autonomous Trajectory Tracking While Considering Collision Avoidance of UAVs Based on Geometric Relations. Energies, 12(8), 1551. https://doi.org/10.3390/en12081551