
Analysis of Perception Accuracy of Roadside Millimeter-Wave Radar for Traffic Risk Assessment and Early Warning Systems


Abstract
1. Introduction
2. Related work
2.1. Traffic Risk Assessment and Early Warning Systems
2.2. Radar Perception Accuracy Analysis
3. Factors Influencing Positioning Accuracy
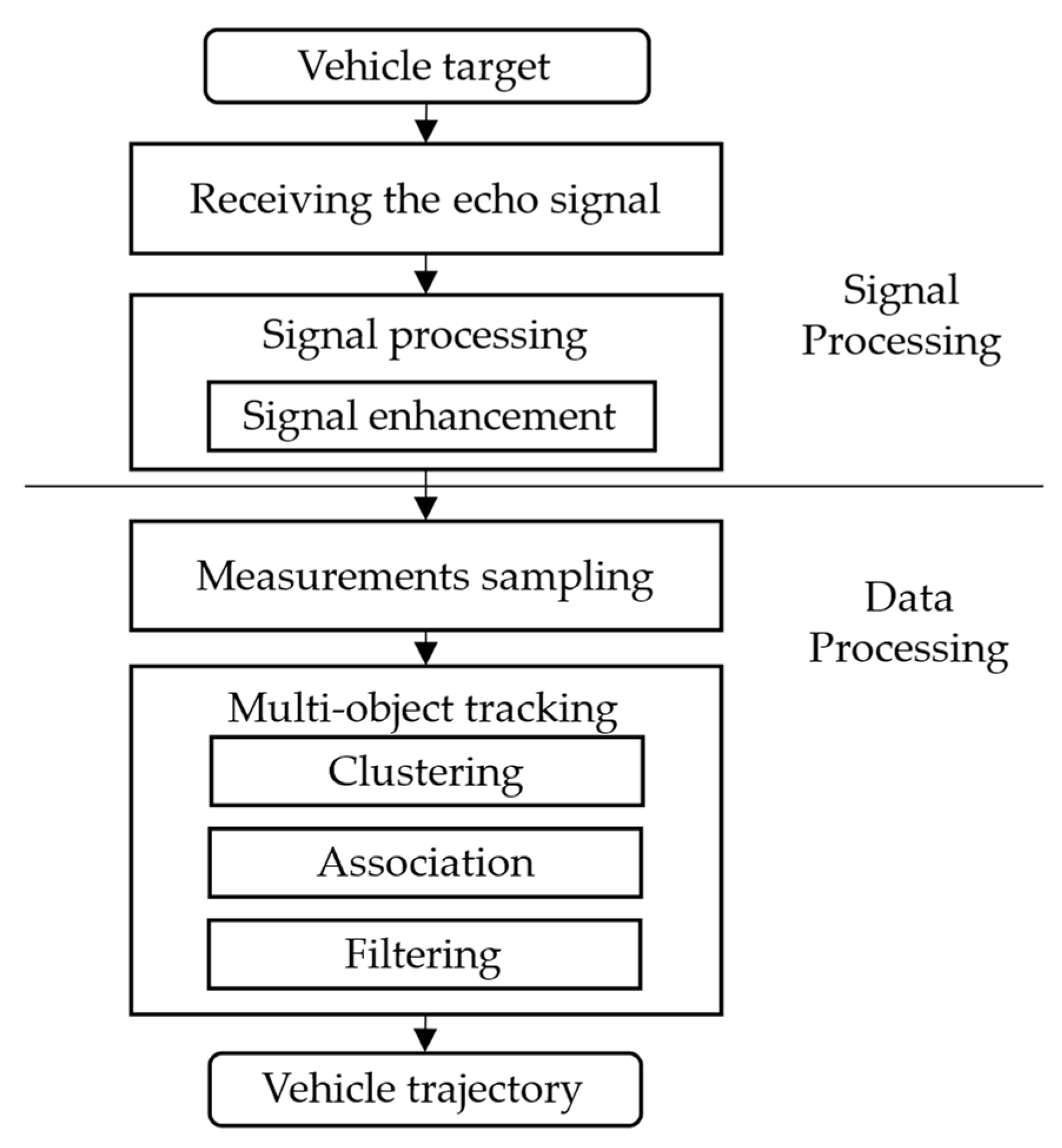
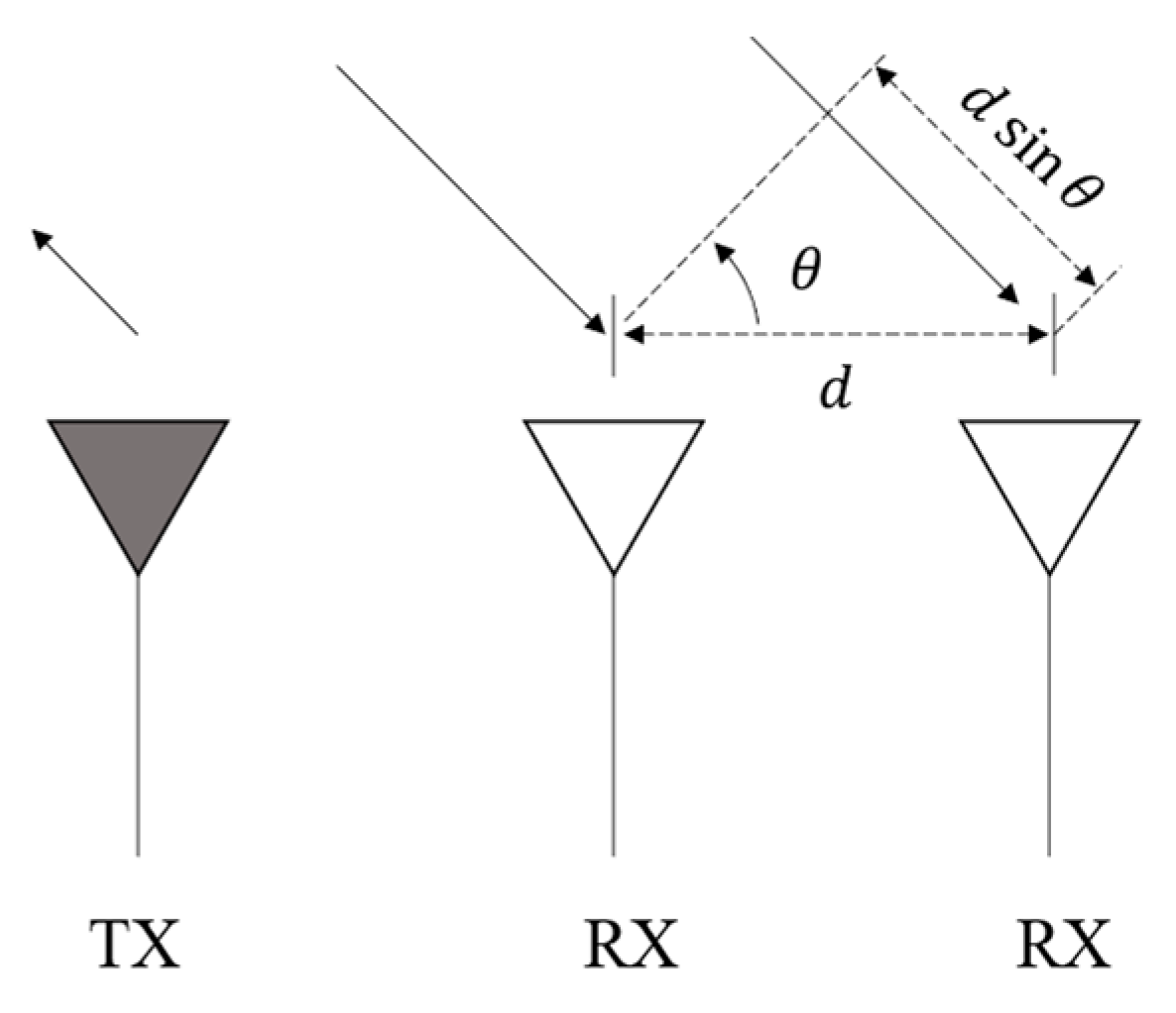
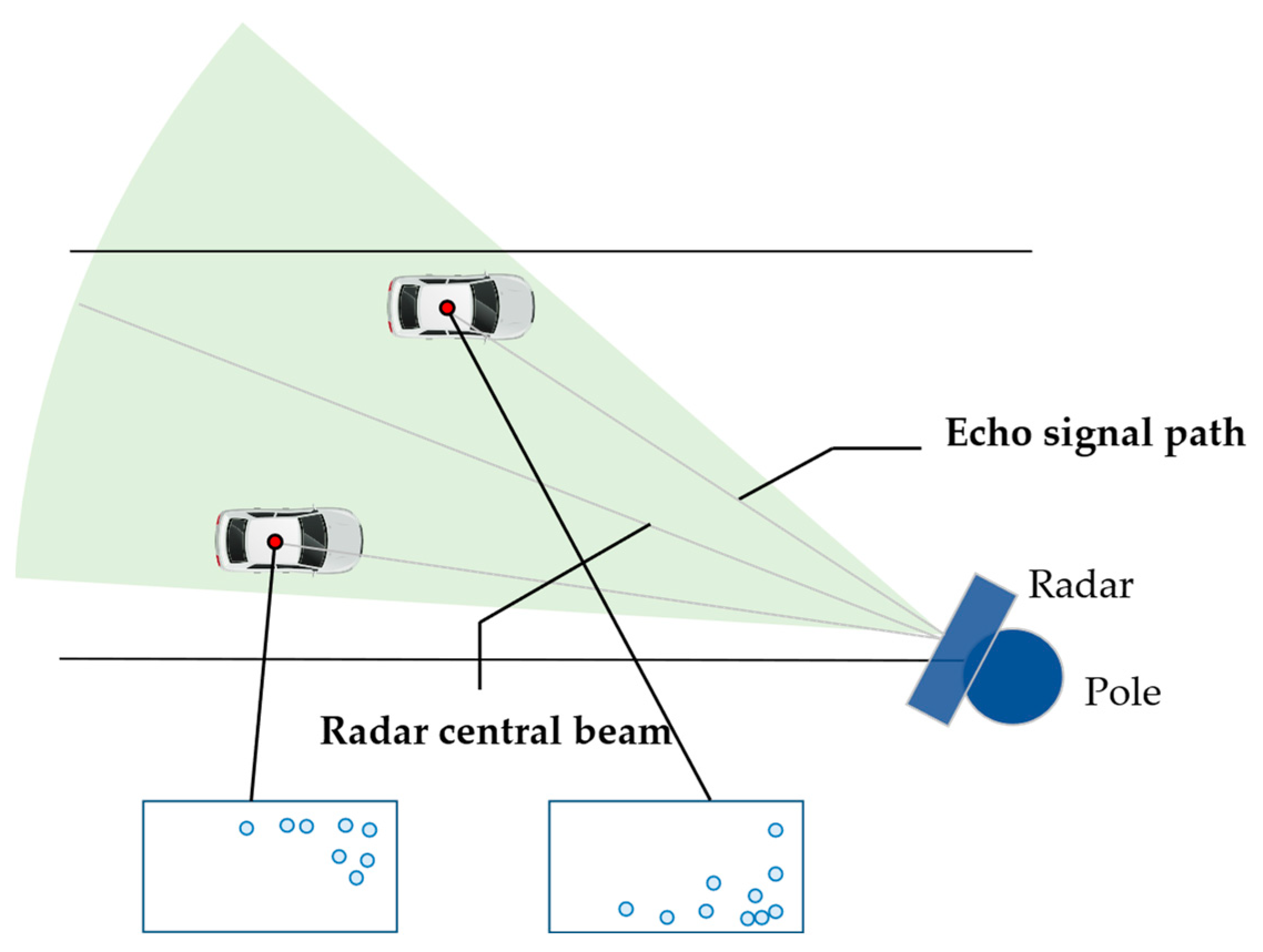
3.1. Radar Detection Principles
3.1.1. Signal Processing Module
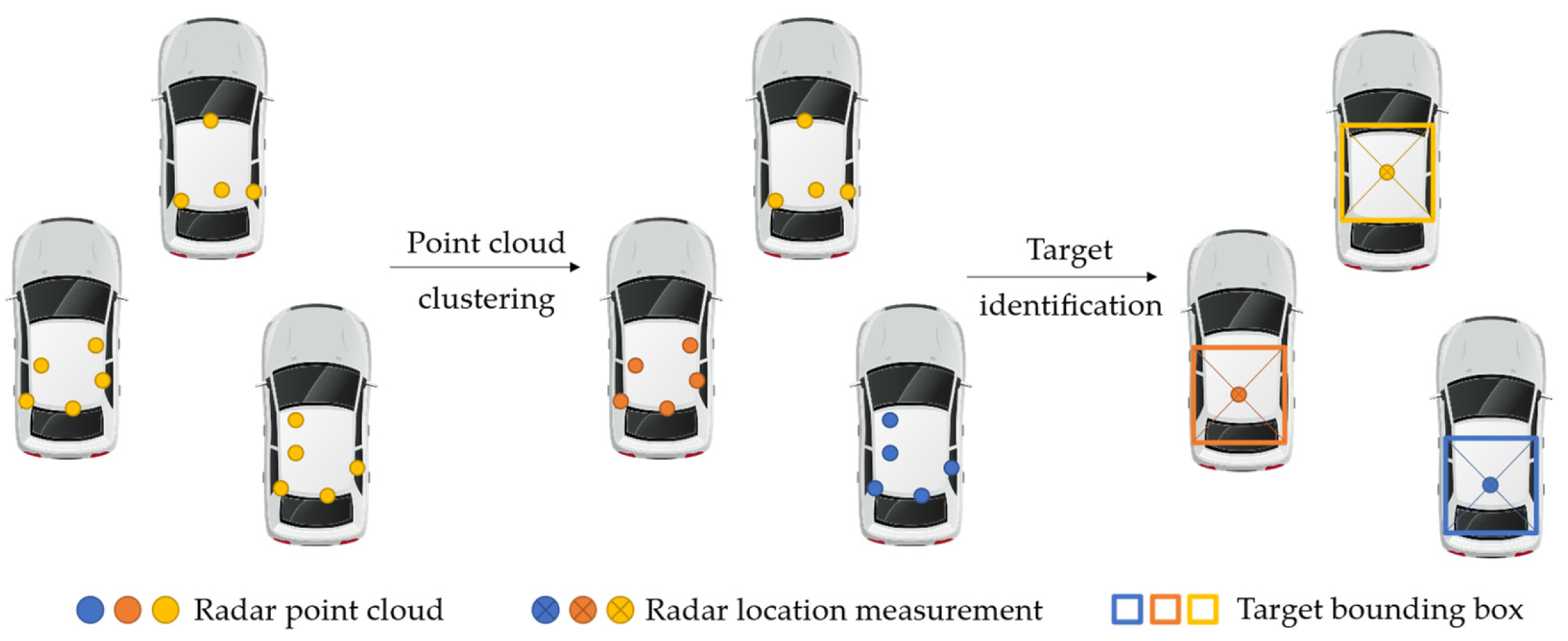
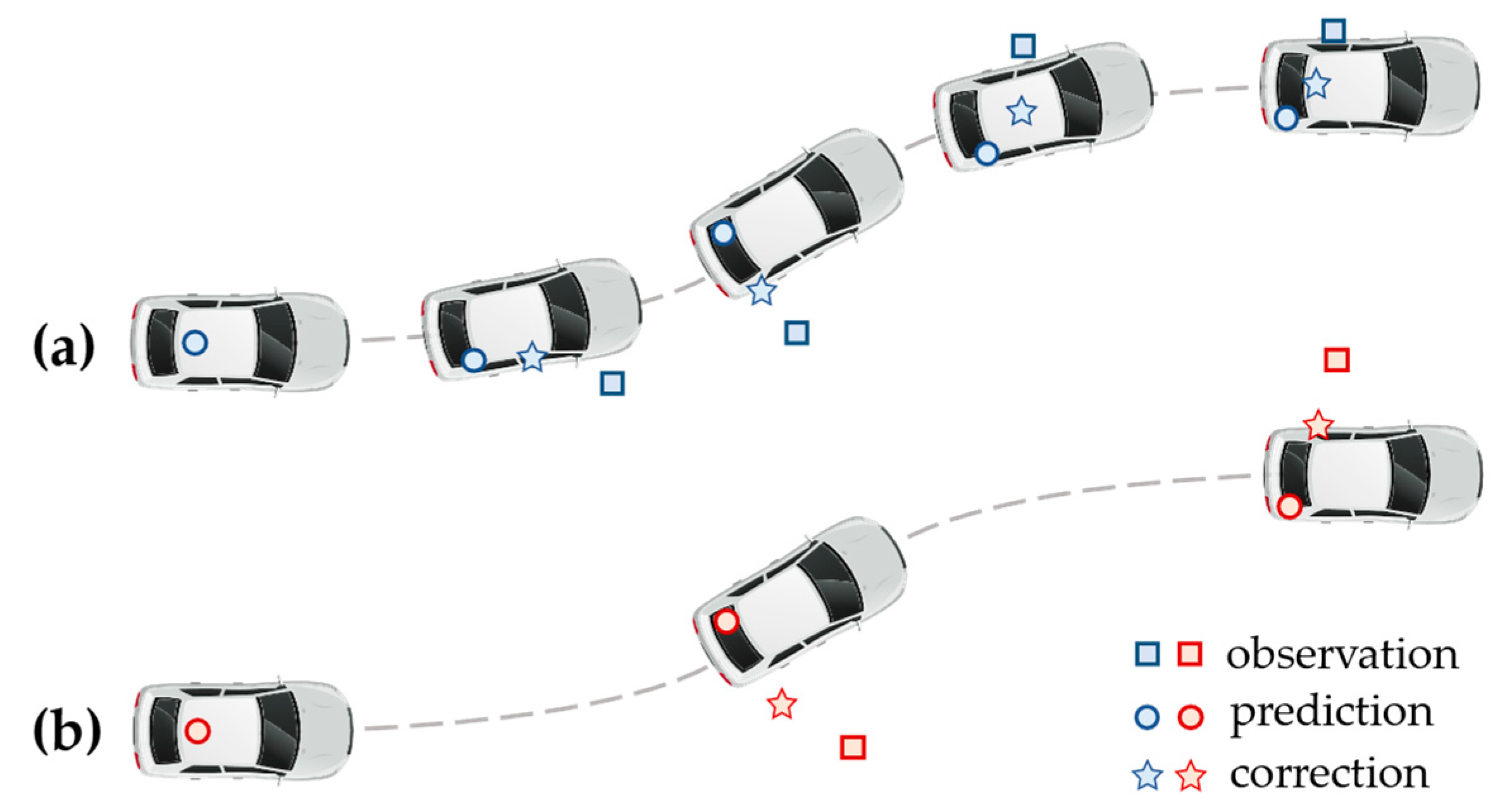
3.1.2. Data Processing Module
3.2. Analysis of the Factors Influencing Positioning Accuracy
3.2.1. Radar Installation Height
3.2.2. Radar Sampling Frequency
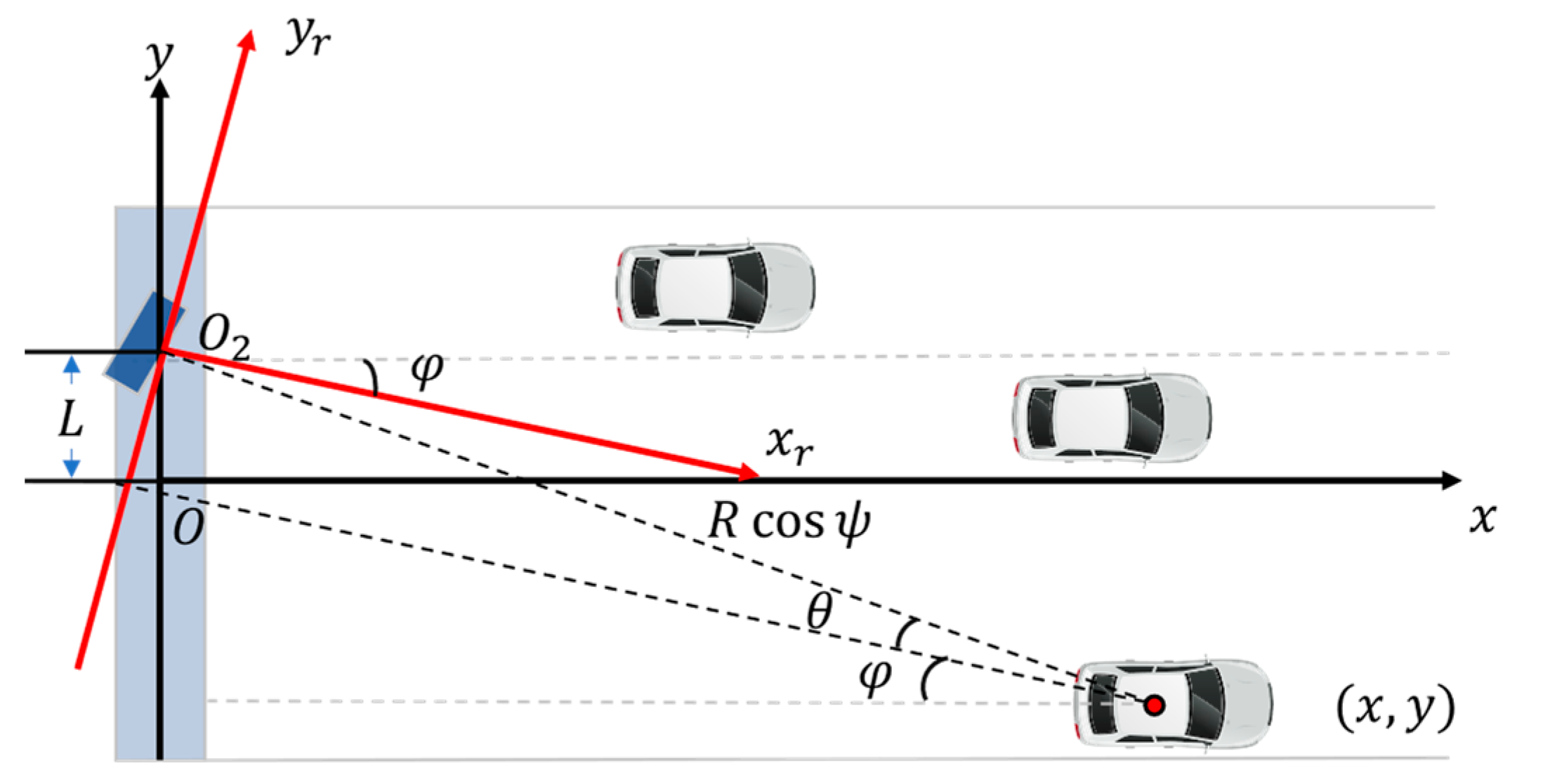
3.2.3. Vehicle Location
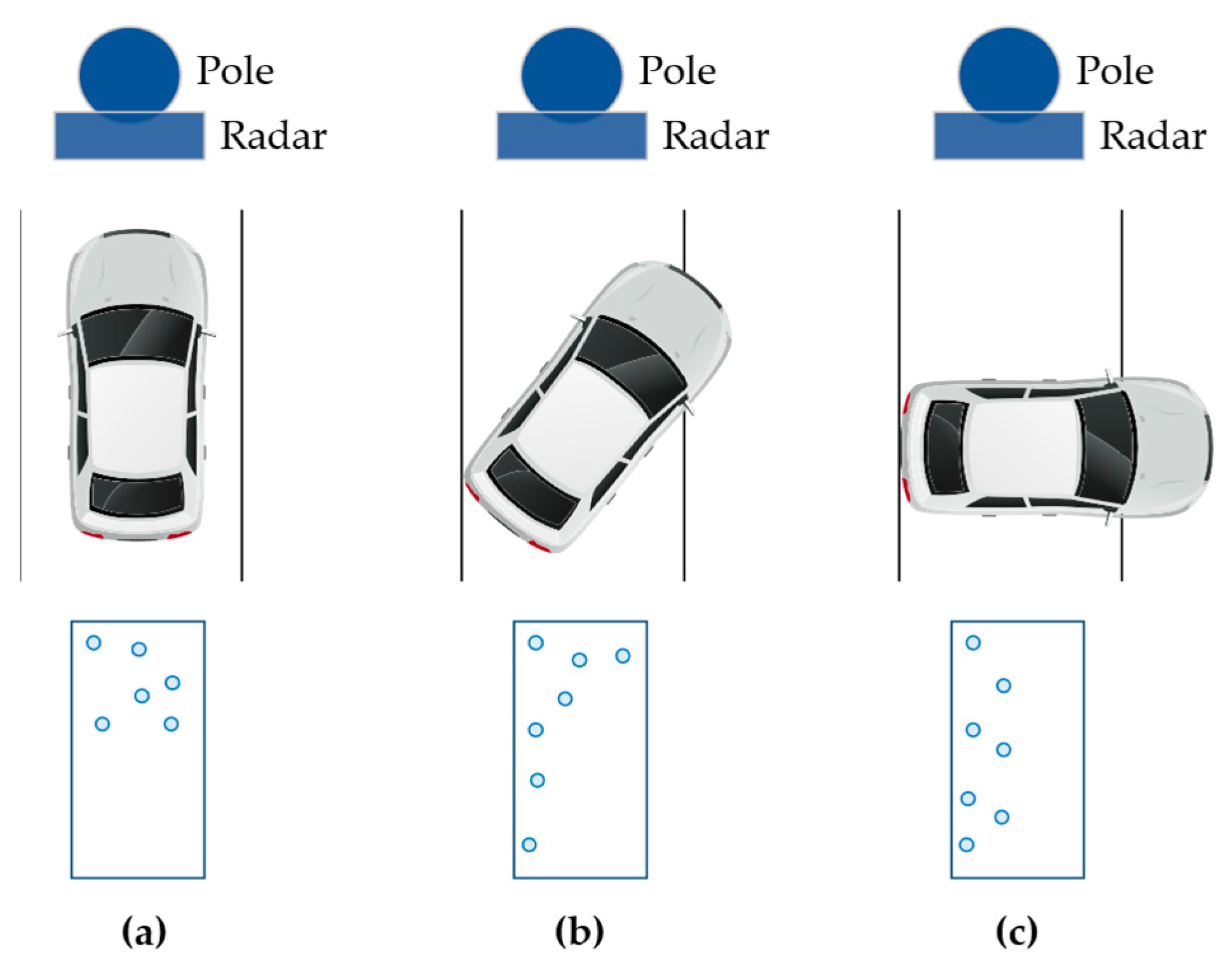
3.2.4. Vehicle Posture
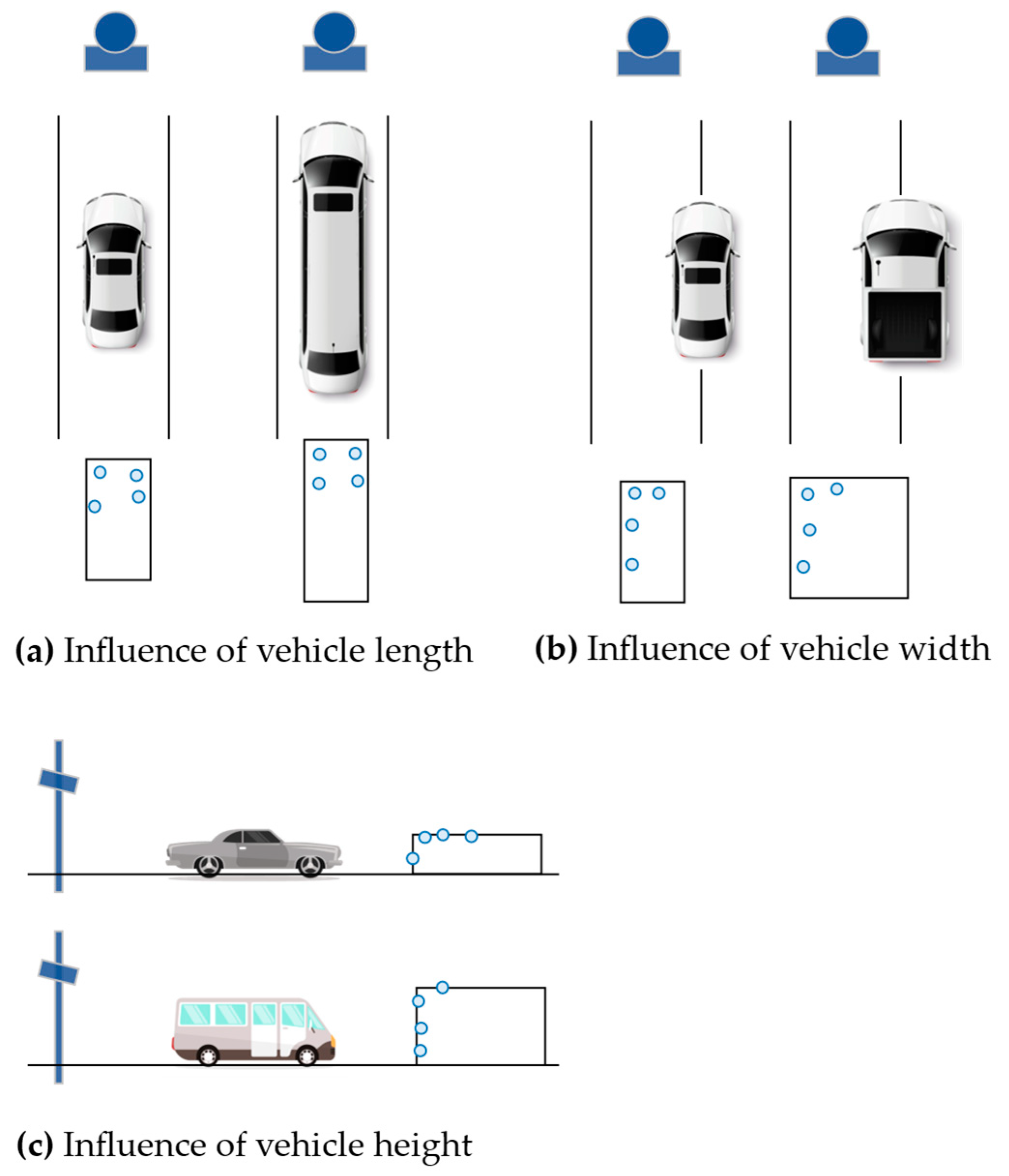
3.2.5. Vehicle Size
4. Simulation Results
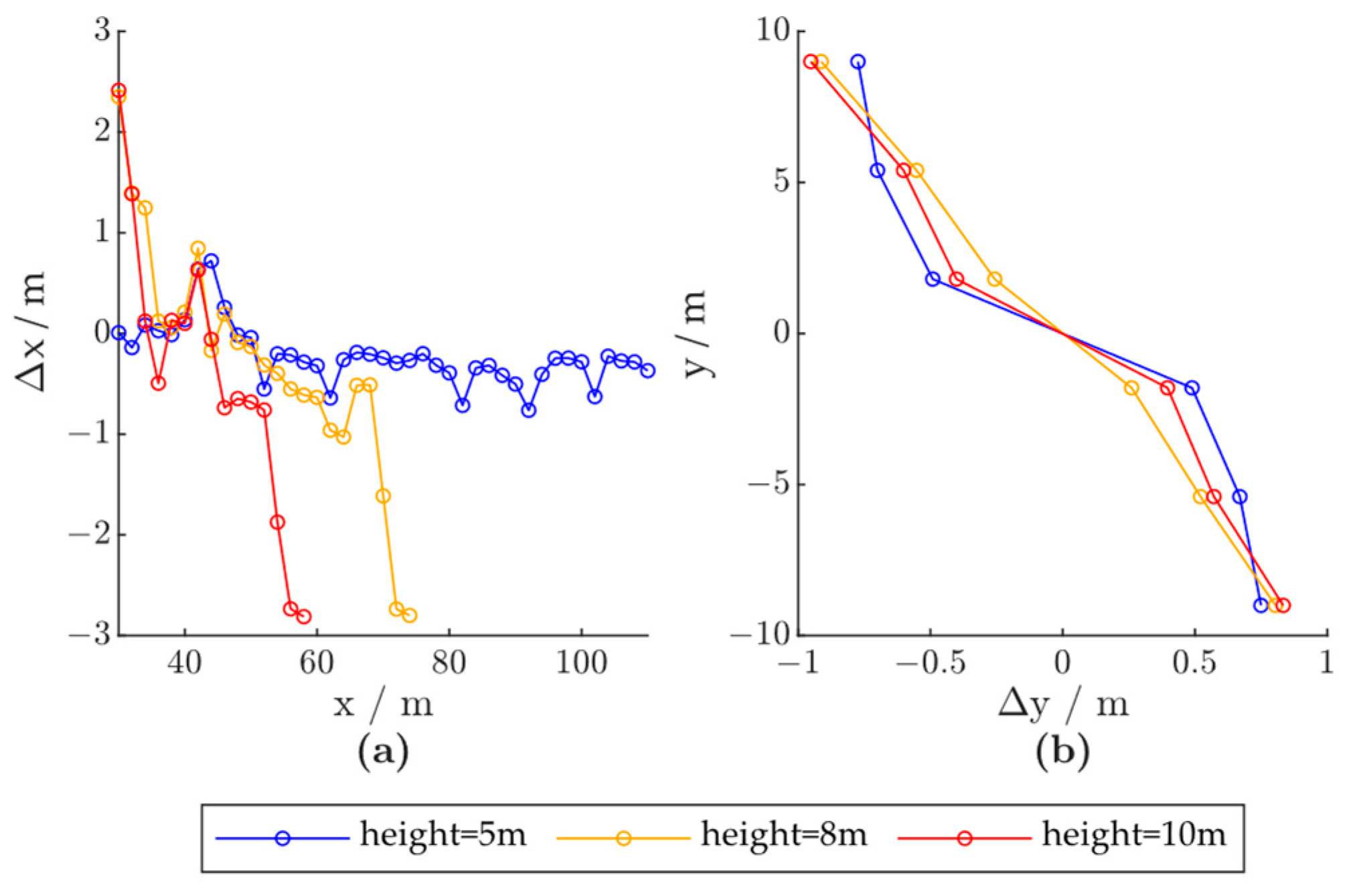
4.1. Influence of Radar Installation Height
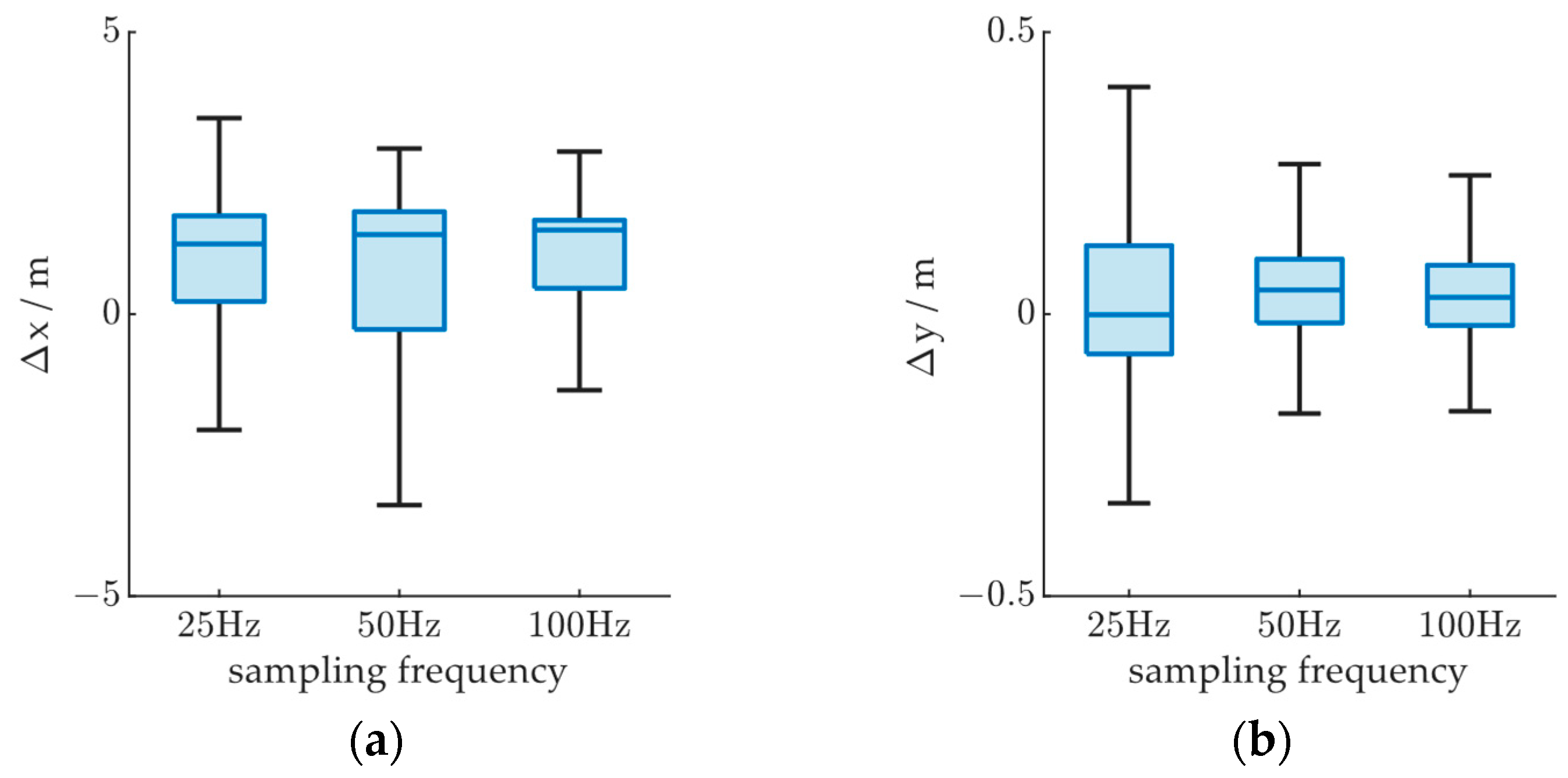
4.2. Influence of Radar Sampling Frequency
4.3. Influence of Vehicle Location
4.4. Influence of Vehicle Posture
4.5. Influence of Vehicle Size
5. Guidelines for MMW Radar Data Processing
5.1. Data Filtering Based on Vehicle Location
5.2. Data Filtering Based on Vehicle Posture
5.3. Measurement Adjustment Based on Vehicle Size
6. Conclusions
- Influence of radar installation height: When the radar is installed at a higher position with a greater pitch angle to monitor the same section of road, a larger longitudinal positioning error is observed when the vehicle is driving away from the radar FOV.
- Influence of radar sampling frequency: Greater tracking error on the y-direction is observed when the sampling frequency is lower. The tracking error on the x-direction is not significantly influenced by the sampling frequency.
- Influence of vehicle location: When the vehicle passes through the radar FOV, the radar positioning in the longitudinal direction is first positively and then negatively biased. In the lateral positioning, the radar positioning biases to the left when the vehicle locates on the right side of the radar central beam, and vice versa.
- Influence of vehicle posture: A large positioning deviation is observed when the vehicle yaw angle is at .
- Influence of vehicle size: When the vehicle is closer to the radar module, the vehicle height can severely affect longitudinal positioning. The vehicle length causes longitudinal positioning errors when the vehicle is further from the radar module. A greater lateral positioning error is observed when the vehicle is wider.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, Y.; Qin, B.; Zhao, C.; Zhu, Y.; Cao, J.; Ji, Y. A novel spatio-temporal synchronization method of roadside asynchronous MMW radar-camera for sensor fusion. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22278–22289. [Google Scholar] [CrossRef]
- Zhao, C.; Liao, F.; Li, X.; Du, Y. Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network. Transp. Res. Pt. C-Emerg. Technol. 2021, 128, 103176. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, C.; Liao, F.; Li, X.; Du, Y. Online parking assignment in an environment of partially connected vehicles: A multi-agent deep reinforcement learning approach. Transp. Res. Pt. C-Emerg. Technol. 2022, 138, 103624. [Google Scholar] [CrossRef]
- Zhao, C.; Zhu, Y.; Du, Y.; Liao, F.; Chan, C. A novel direct trajectory planning approach based on generative adversarial networks and rapidly-exploring random tree. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17910–17921. [Google Scholar] [CrossRef]
- Du, Y.; Chen, J.; Zhao, C.; Liu, C.; Liao, F.; Chan, C. Comfortable and energy-efficient speed control of autonomous vehicles on rough pavements using deep reinforcement learning. Transp. Res. Pt. C-Emerg. Technol. 2022, 134, 103489. [Google Scholar] [CrossRef]
- Du, Y.; Chen, J.; Zhao, C.; Liao, F.; Zhu, M. A hierarchical framework for improving ride comfort of autonomous vehicles via deep reinforcement learning with external knowledge. Comput.-Aided Civil Infrastruct. Eng. 2022. [Google Scholar] [CrossRef]
- Zhou, T.; Yang, M.; Jiang, K.; Wong, H.; Yang, D. MMW radar-based technologies in autonomous driving: A review. Sensors 2020, 20, 7283. [Google Scholar] [CrossRef]
- Zhao, C.; Song, A.; Du, Y.; Yang, B. TrajGAT: A map-embedded graph attention network for real-time vehicle trajectory imputation of roadside perception. Transp. Res. Pt. C-Emerg. Technol. 2022, 142, 103787. [Google Scholar] [CrossRef]
- Lei, C.; Zhao, C.; Ji, Y.; Shen, Y.; Du, Y. Identifying and correcting the errors of vehicle trajectories from roadside millimetre-wave radars. IET Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Zhao, C.; Song, A.; Zhu, Y.; Jiang, S.; Liao, F.; Du, Y. Data-driven indoor positioning correction for infrastructure-enabled autonomous driving systems: A lifelong framework. IEEE Trans. Intell. Transp. Syst. 2023, 1–15. [Google Scholar] [CrossRef]
- Du, Y.; Wang, F.; Zhao, C.; Zhu, Y.; Ji, Y. Quantifying the performance and optimizing the placement of roadside sensors for cooperative vehicle-infrastructure systems. IET Intell. Transp. Syst. 2022, 16, 908–925. [Google Scholar] [CrossRef]
- Du, Y.; Shi, Y.; Zhao, C.; Du, Z.; Ji, Y. A lifelong framework for data quality monitoring of roadside sensors in cooperative vehicle-infrastructure systems. Comput. Electr. Eng. 2022, 100, 108030. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, C.; Jiang, S.; Zhang, X.; Li, Z.; Du, Y. Safe, Efficient, and Comfortable Autonomous Driving Based on Cooperative Vehicle Infrastructure System. Int. J. Environ. Res. Public Health 2023, 20, 893. [Google Scholar]
- Fu, C.; Sayed, T. Comparison of threshold determination methods for the deceleration rate to avoid a crash (DRAC)-based crash estimation. Accid. Anal. Prev. 2021, 153, 106051. [Google Scholar] [CrossRef] [PubMed]
- Wen, F.; Lee, Y. Driving Safety Assessment on Standard Deviation of Lateral Position and Time Exposed Time-to-Collision Measures under Driving in Left-Hand and Right-Hand Traffic Conventions; Springer: Berlin, Germany, 2022; pp. 681–687. [Google Scholar]
- Zheng, H.; Zhou, J.; Wang, H. A data-based lane departure warning algorithm using hidden Markov model. Int. J. Veh. Des. 2019, 79, 292–315. [Google Scholar] [CrossRef]
- Xu, L.H.; Luo, Q.; Zhang, L.Y.; Huang, Y.G. Research on variable virtual lane boundary for lane departure warning systems. Adv. Transp. Stud. 2014, 32, 37–48. [Google Scholar]
- Ji, Y.; Ni, L.; Zhao, C.; Lei, C.; Du, Y.; Wang, W. TriPField: A 3D potential field model and its applications to local path planning of autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- El-Shennawy, M.; Al-Qudsi, B.; Joram, N.; Ellinger, F. Fundamental limitations of crystal oscillator tolerances on FMCW radar accuracy. In Proceedings of the 2016 German Microwave Conference (GeMiC), Bochum, Germany, 14–16 March 2016. [Google Scholar]
- Ayhan, S.; Scherr, S.; Bhutani, A.; Fischbach, B.; Pauli, M.; Zwick, T. Impact of frequency ramp nonlinearity, phase noise, and SNR on FMCW radar accuracy. IEEE Trans. Microw. Theory Tech. 2016, 64, 3290–3301. [Google Scholar] [CrossRef]
- Kimoto, H.; Kikuma, N.; Sakakibara, K. Target direction estimation characteristics of capon algorithm in MIMO radar. In Proceedings of the 2019 International Symposium on Antennas and Propagation (ISAP), Xi’an, China, 27–30 October 2019. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, Z.; Jiang, W.; He, Q.; Zhang, W.; Meng, G. An effective accuracy evaluation method for LFMCW radar displacement monitoring with phasor statistical analysis. IEEE Sens. J. 2019, 19, 12224–12234. [Google Scholar] [CrossRef]
- Golovachev, Y.; Etinger, A.; Pinhasi, G.; Pinhasi, Y. Millimeter wave high resolution radar accuracy in fog conditions—Theory and experimental verification. Sensors 2018, 18, 2148. [Google Scholar] [CrossRef] [PubMed]
- Balal, N.; Pinhasi, G.A.; Pinhasi, Y. Atmospheric and fog effects on ultra-wide band radar operating at extremely high frequencies. Sensors 2016, 16, 751. [Google Scholar] [CrossRef] [PubMed]
- Choi, W.Y.; Kang, C.M.; Lee, S.; Chung, C.C. Radar accuracy modeling and its application to object vehicle tracking. Int. J. Control Autom. Syst. 2020, 18, 3146–3158. [Google Scholar] [CrossRef]
- Iovescu, C.; Rao, S. The Fundamentals of Millimeter Wave Radar Sensors; Texas Instruments: Dallas, TX, USA, 2020. [Google Scholar]
- Fahad, A.; Alshatri, N.; Tari, Z.; Alamri, A.; Khalil, I.; Zomaya, A.Y.; Foufou, S.; Bouras, A. A survey of clustering algorithms for big data: Taxonomy and empirical analysis. IEEE Trans. Emerg. Top. Comput. 2014, 2, 267–279. [Google Scholar] [CrossRef]
- Xu, D.; Tian, Y. A comprehensive survey of clustering algorithms. Ann. Data Sci. 2015, 2, 165–193. [Google Scholar] [CrossRef]
- Wegmann, M.; Zipperling, D.; Hillenbrand, J.; Fleischer, J.U.R. A review of systematic selection of clustering algorithms and their evaluation. arXiv 2021, arXiv:2106.12792. [Google Scholar]
- Rakai, L.; Song, H.; Sun, S.; Zhang, W.; Yang, Y. Data association in multiple object tracking: A survey of recent techniques. Expert Syst. Appl. 2021, 192, 116300. [Google Scholar] [CrossRef]
- Ritter, C.; Imle, A.; Lee, J.Y.; Muller, B.; Fackler, O.T.; Bartenschlager, R.; Rohr, K. Two-filter probabilistic data association for tracking of virus particles in fluorescence microscopy images. In Proceedings of the 2018 IEEE 15th International Symposium on Biomedical Imaging (ISBI 2018), Washington, DC, USA, 4–7 April 2018. [Google Scholar]
- Leonard, M.R.; Zoubir, A.M. Multi-target tracking in distributed sensor networks using particle PHD filters. Signal Process. 2019, 159, 130–146. [Google Scholar] [CrossRef]
- Haag, S.; Duraisamy, B.; Koch, W.; Dickmann, J. Classification Assisted Tracking for Autonomous Driving Domain. In 2018 Sensor Data Fusion: Trends, Solutions, Applications (SDF); IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Longitudinal Location | Effective Scatterer | Measured Points |
|---|---|---|
| Partial entry | Front | Few |
| Full entry | Body and rear | Many |
| Driving away | Rear | Some |
| Parameters | Value | Unit |
|---|---|---|
| Center frequency | 77 × 109 | Hz |
| Range limits | 150 | m |
| Azimuthal field of view | 20 | degree |
| Elevation field of view | 5 | degree |
| Range rate limits | 100 | m/s |
| Azimuth resolution | 4 | degree |
| Range resolution | 2.5 | m |
| Range rate resolution | 0.5 | m/s |
| Update rate | 100 | Hz |
| Installation position | (0, 0, 5) | m |
| Installation pose | (0, 5, 0) | degree |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Ding, D.; Du, Z.; Shi, Y.; Su, G.; Yu, S. Analysis of Perception Accuracy of Roadside Millimeter-Wave Radar for Traffic Risk Assessment and Early Warning Systems. Int. J. Environ. Res. Public Health 2023, 20, 879. https://doi.org/10.3390/ijerph20010879
Zhao C, Ding D, Du Z, Shi Y, Su G, Yu S. Analysis of Perception Accuracy of Roadside Millimeter-Wave Radar for Traffic Risk Assessment and Early Warning Systems. International Journal of Environmental Research and Public Health. 2023; 20(1):879. https://doi.org/10.3390/ijerph20010879
Chicago/Turabian StyleZhao, Cong, Delong Ding, Zhouyang Du, Yupeng Shi, Guimin Su, and Shanchuan Yu. 2023. "Analysis of Perception Accuracy of Roadside Millimeter-Wave Radar for Traffic Risk Assessment and Early Warning Systems" International Journal of Environmental Research and Public Health 20, no. 1: 879. https://doi.org/10.3390/ijerph20010879
APA StyleZhao, C., Ding, D., Du, Z., Shi, Y., Su, G., & Yu, S. (2023). Analysis of Perception Accuracy of Roadside Millimeter-Wave Radar for Traffic Risk Assessment and Early Warning Systems. International Journal of Environmental Research and Public Health, 20(1), 879. https://doi.org/10.3390/ijerph20010879