
Wake Detection and Positioning for Autonomous Underwater Vehicles Based on Cilium-Inspired Wake Sensor

 , ,
, ,
Abstract
1. Introduction
2. CIWS Model
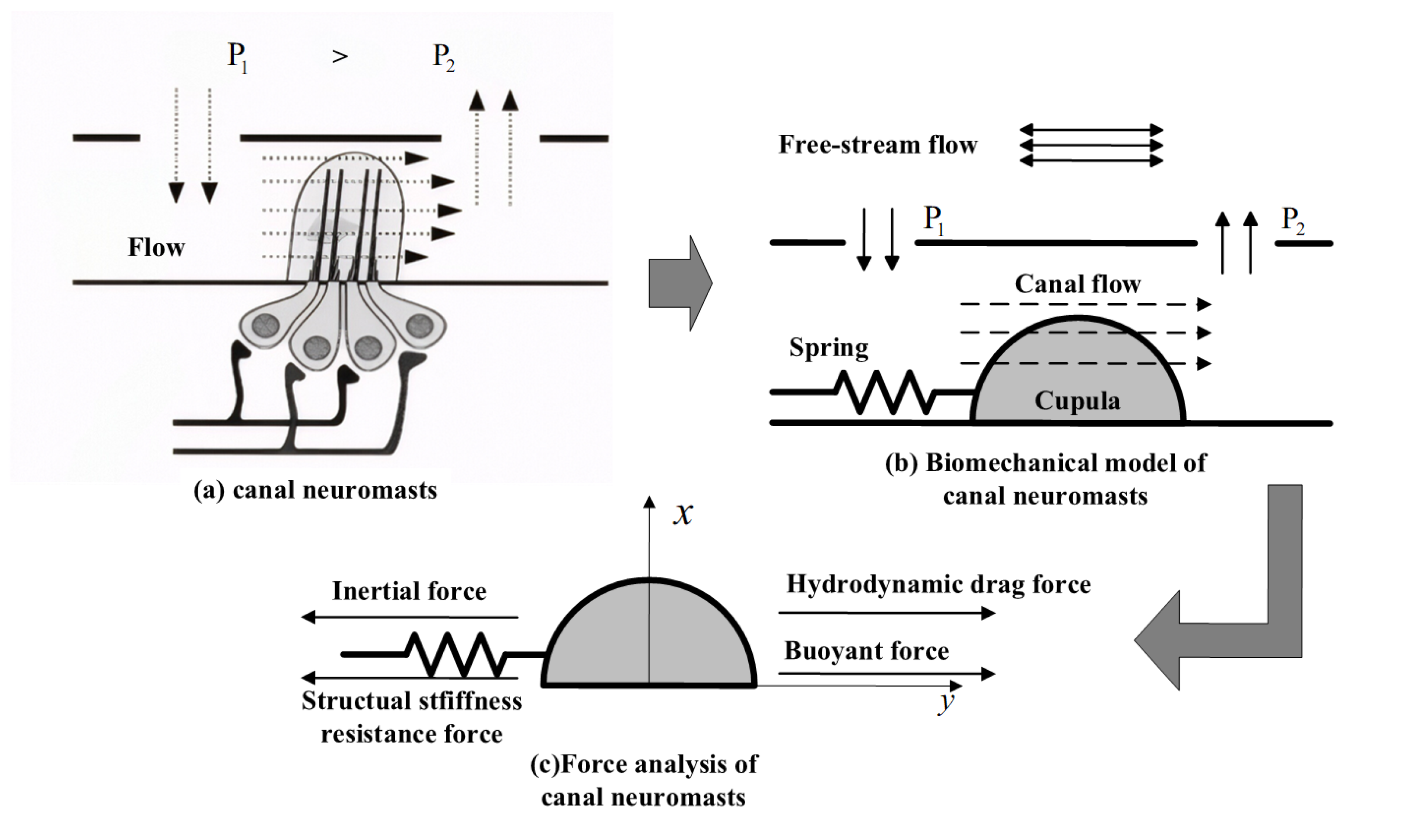
2.1. Flow Field Sensing Principle Based on Bio-Inspired Cilium
2.2. CIWS
3. Experimental Testing and Modeling of the Flow Field of Pump-Jet Propellers
3.1. Wake Field Generation Using Pump-Jet Propellers
3.2. Wake Flow Field Measurement
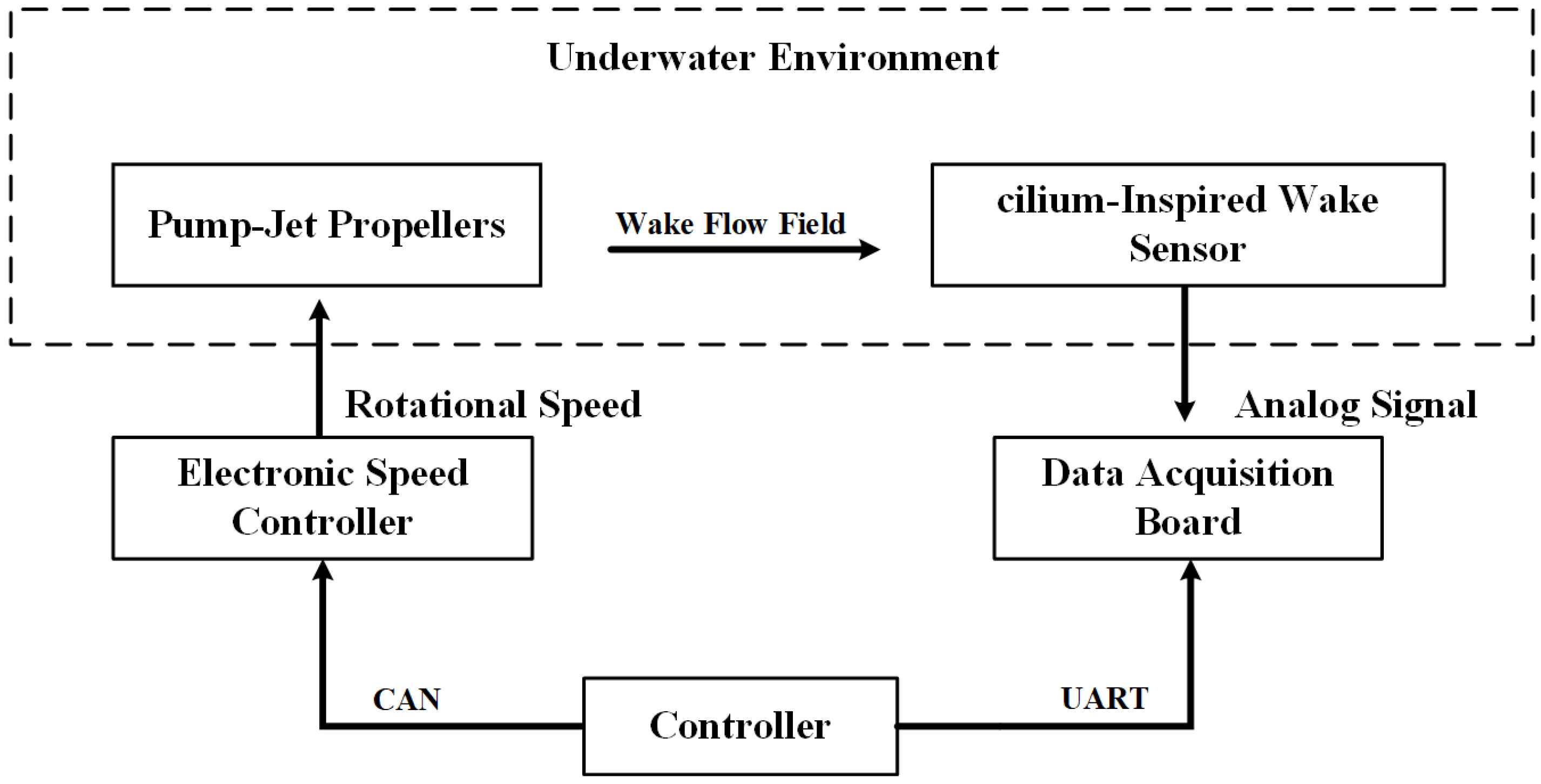
4. Wake Detection Experiment Based on CIWS
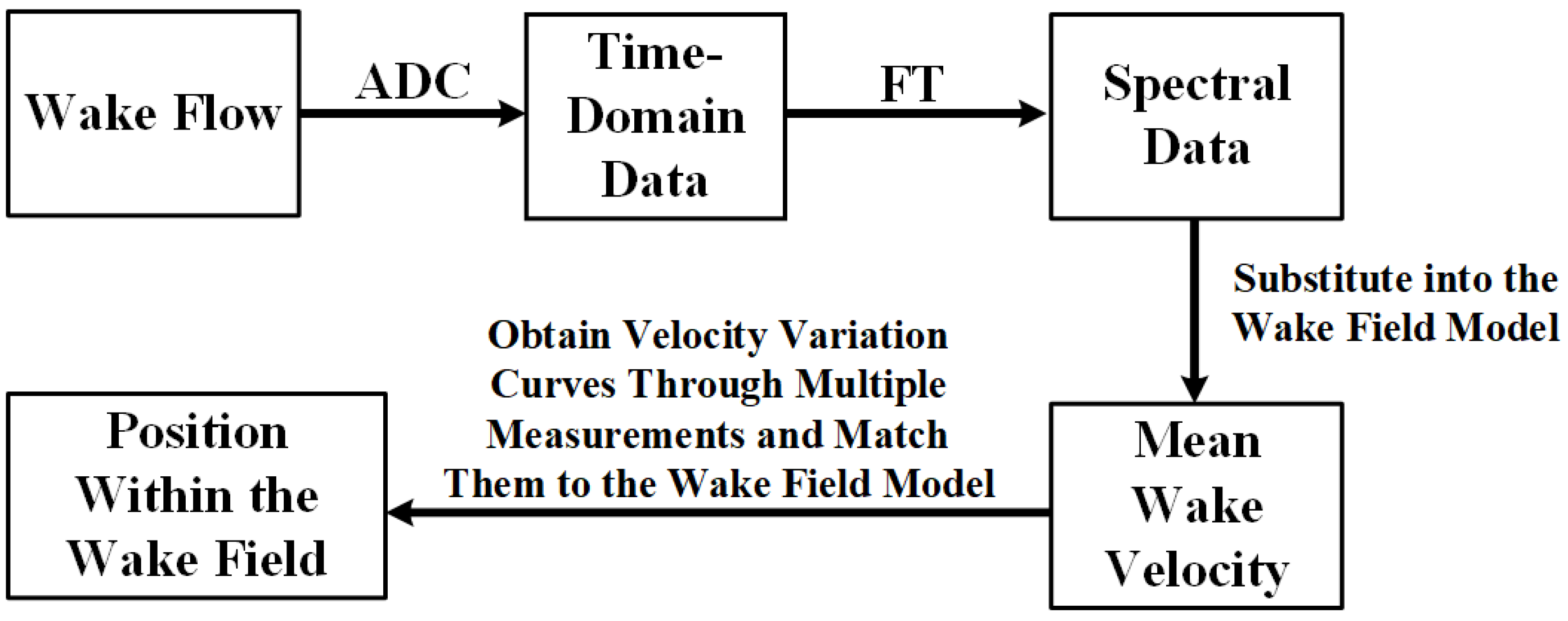
5. Wake Data Analysis and Positioning
5.1. Frequency Domain Analysis
5.2. Characteristic Frequency Analysis
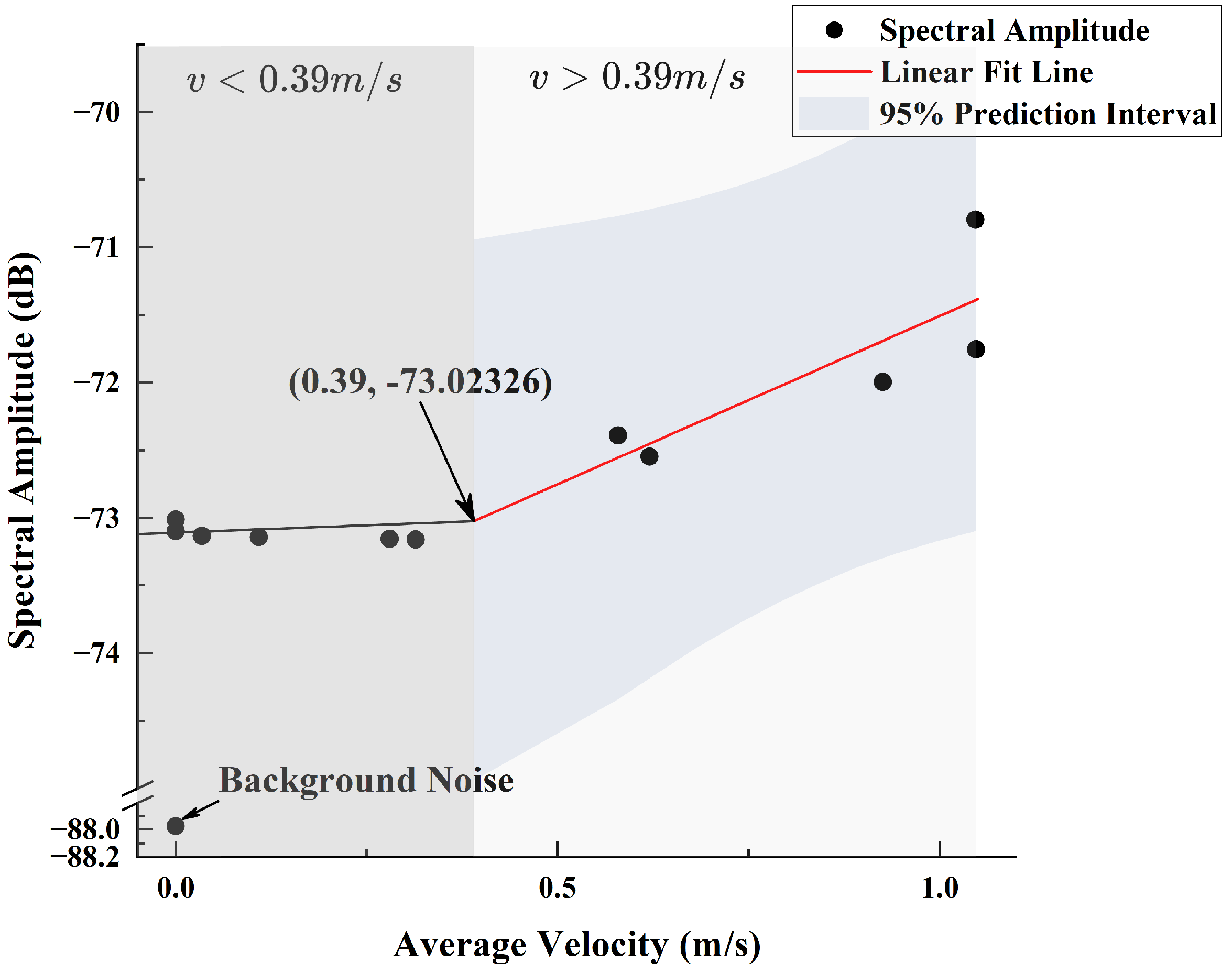
5.3. Detection Data and Flow Field Fitting
5.4. Wake Detection Range
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AUV | Autonomous underwater vehicle |
| CIWS | Cilium-inspired wake sensor |
| CN | Canal neuromasts |
| PJP | Pump-jet propeller |
| ADC | Analog-to-digital conversion |
| RMS | Root mean square |
| FT | Fourier transform |
References
- Zhang, W.; Wang, N.X.; Wei, S.; Du, X.; Yan, Z. Overview of unmanned underwater vehicle swarm development status and key technologies. J. Harbin Eng. Univ. 2020, 41, 289–297. [Google Scholar]
- Zhao, Z.; Hu, Q.; Feng, H.; Feng, X.; Su, W. A cooperative hunting method for multi-AUV swarm in underwater weak information environment with obstacles. J. Mar. Sci. Eng. 2022, 10, 1266. [Google Scholar] [CrossRef]
- Jiang, B.; Du, J.; Jiang, C.; Han, Z.; Debbah, M. Underwater searching and multi-round data collection via AUV swarms: An energy-efficient AoI-aware MAPPO approach. IEEE Internet Things J. 2023, 11, 12768–12782. [Google Scholar] [CrossRef]
- Ghafoor, H.; Noh, Y. An overview of next-generation underwater target detection and tracking: An integrated underwater architecture. IEEE Access 2019, 7, 98841–98853. [Google Scholar] [CrossRef]
- Wei, Q.; Yang, Y.; Zhou, X.; Hu, Z.; Li, Y.; Fan, C.; Zheng, Q.; Wang, Z. Enhancing Inter-AUV Perception: Adaptive 6-DOF Pose Estimation with Synthetic Images for AUV Swarm Sensing. Drones 2024, 8, 486. [Google Scholar] [CrossRef]
- Wei, Q.; Yang, Y.; Zhou, X.; Fan, C.; Zheng, Q.; Hu, Z. Localization method for underwater robot swarms based on enhanced visual markers. Electronics 2023, 12, 4882. [Google Scholar] [CrossRef]
- Wang, Q.; He, B.; Zhang, Y.; Yu, F.; Huang, X.; Yang, R. An autonomous cooperative system of multi-AUV for underwater targets detection and localization. Eng. Appl. Artif. Intell. 2023, 121, 105907. [Google Scholar] [CrossRef]
- Lodovisi, C.; Loreti, P.; Bracciale, L.; Betti, S. Performance analysis of hybrid optical–acoustic AUV swarms for marine monitoring. Future Internet 2018, 10, 65. [Google Scholar] [CrossRef]
- Zhou, Q.; Ji, B.; Wei, Y.; Hu, B.; Gao, Y.; Xu, Q.; Zhou, J.; Zhou, B. A bio-inspired cilia array as the dielectric layer for flexible capacitive pressure sensors with high sensitivity and a broad detection range. J. Mater. Chem. A 2019, 7, 27334–27346. [Google Scholar] [CrossRef]
- Zhou, Z.G.; Liu, Z.W. Biomimetic cilia based on MEMS technology. J. Bionic Eng. 2008, 5, 358–365. [Google Scholar] [CrossRef]
- Astreinidi Blandin, A.; Bernardeschi, I.; Beccai, L. Biomechanics in soft mechanical sensing: From natural case studies to the artificial world. Biomimetics 2018, 3, 32. [Google Scholar] [CrossRef]
- van Netten, S.M. Hydrodynamics of the excitation of the cupula in the fish canal lateral line. J. Acoust. Soc. Am. 1991, 89, 310–319. [Google Scholar] [CrossRef]
- Van Netten, S.M. Hydrodynamic detection by cupulae in a lateral line canal: Functional relations between physics and physiology. Biol. Cybern. 2006, 94, 67–85. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, D.; Trap, D.; Kottapalli, A.G. Piezoresistive carbon nanofiber-based cilia-inspired flow sensor. Nanomaterials 2020, 10, 211. [Google Scholar] [CrossRef] [PubMed]
- Qiao, Q.; Kong, X.; Wu, S.; Liu, G.; Zhang, G.; Yang, H.; Zhang, W.; Yang, Y.; Jia, L.; He, C.; et al. A bio-inspired MEMS wake detector for AUV tracking and coordinated formation. Remote Sens. 2023, 15, 2949. [Google Scholar] [CrossRef]
- Kim, J. Wake-Responsive AUV Guidance Assisted by Passive Sonar Measurements. J. Mar. Sci. Eng. 2024, 12, 645. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, N.; Cho, H.; Kim, S.Y. A guidance logic development for wake homing guidance system (ICCAS 2014). In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Goyang-si, Republic of Korea, 22–25 October 2014; pp. 190–194. [Google Scholar]
- Liu, L.; Su, S.; Huang, Z. Design of Torpedo Wake Homing System for Higher Trajectory Accuracy. J. Unmanned Undersea Syst. 2010, 18, 272–276. [Google Scholar]
- Basohbat Novinzadeh, A.R.; Asadi Matak, M. Design of stable nonlinear guidance of an underwater vehicle in the ship wake via estimated path by particle filter. Modares Mech. Eng. 2017, 17, 260–266. [Google Scholar]
- Shizhe, T. Underwater artificial lateral line flow sensors. Microsyst. Technol. 2014, 20, 2123–2136. [Google Scholar] [CrossRef]
- Qiao, Q. Design and Implementation of a Bio-Inspired MEMS Wake Sensor for UUV. Master’s Thesis, North University of China, Taiyuan, China, 2023. [Google Scholar]
- Yang, Y.; Zhou, X. Research on High-precision Unmanned Underwater Vehicles Team Formation without Communication Based on Visual Positioning Technology. Digit. Ocean. Underw. Warf. 2022, 5, 50–58. [Google Scholar]
- Rao, Z.Q. Numerical Simulation of Hydrodynamical Performance of Pump Jet Propulsor. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2012. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cilium Structure | Diameter | Length | Operating Voltage |
|---|---|---|---|
| Crossbeam | 24 mm | 160 mm | ±5 V |
| Stator Position | Number of Rotor Blades | Number of Stator Blades | Shroud Inner Diameter | Central Shaft Diameter | Supply Voltage | Set Rotational Speed | Actual Rotational Speed |
|---|---|---|---|---|---|---|---|
| Aft Stator | Seven Blades | Nine Blades | 80 mm | 30 mm | 24 V | 1000 rpm | 960 rpm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Yang, Y.; Liao, Z.; Zhu, X.; Wang, R.; Zhang, P.; Hu, Z. Wake Detection and Positioning for Autonomous Underwater Vehicles Based on Cilium-Inspired Wake Sensor. Sensors 2025, 25, 41. https://doi.org/10.3390/s25010041
Hu X, Yang Y, Liao Z, Zhu X, Wang R, Zhang P, Hu Z. Wake Detection and Positioning for Autonomous Underwater Vehicles Based on Cilium-Inspired Wake Sensor. Sensors. 2025; 25(1):41. https://doi.org/10.3390/s25010041
Chicago/Turabian StyleHu, Xuanye, Yi Yang, Zhiyu Liao, Xinghua Zhu, Renxin Wang, Peng Zhang, and Zhiqiang Hu. 2025. "Wake Detection and Positioning for Autonomous Underwater Vehicles Based on Cilium-Inspired Wake Sensor" Sensors 25, no. 1: 41. https://doi.org/10.3390/s25010041
APA StyleHu, X., Yang, Y., Liao, Z., Zhu, X., Wang, R., Zhang, P., & Hu, Z. (2025). Wake Detection and Positioning for Autonomous Underwater Vehicles Based on Cilium-Inspired Wake Sensor. Sensors, 25(1), 41. https://doi.org/10.3390/s25010041