
An Adaptive Trust Evaluation Model for Detecting Abnormal Nodes in Underwater Acoustic Sensor Networks


Abstract
1. Introduction
- (1)
- Considering the harsh underwater communication environment, it is necessary to evaluate the link quality between nodes first during trust assessment. Based on this evaluation, it is determined whether trust assessment should be conducted in the current cycle, reducing the impact of link quality on the accuracy of trust evaluation.
- (2)
- An adaptive fuzzy comprehensive evaluation algorithm based on variable weighting is proposed to comprehensively consider the multidimensional trust indicators of the target node. By dynamically adjusting the weights of each trust indicator, this algorithm highlights deficiencies in certain trust factors of the target node, thereby enhancing the accuracy of the trust evaluation model.
- (3)
- Fuzzy closeness theory is employed to calculate indirect trust, filtering out recommended nodes with significant deviation from the center. Through this process, nodes with a large deviation are removed, and weights are allocated based on the degree of deviation, thereby improving the reliability of indirect trust.
2. Related Work
3. Network Model and Link Quality Assessment
3.1. Network Model
3.2. Link Quality Assessment
4. Trust Calculation
4.1. Direct Trust
4.1.1. Trust Indicators Generation
- (1)
- Communication Trust
- (2)
- Data Trust
- (3)
- Energy Trust
4.1.2. Direct Trust Calculation
- (1)
- Establish trust factor set and direct trust evaluation set
- (2)
- Build membership matrix
- (3)
- Confirm weights
- (4)
- Fuzzy Comprehensive Evaluation Result
4.2. Indirect Trust
4.3. Comprehensive Trust
4.4. Trust Update
5. Simulation Results and Performance Analysis
5.1. Performance of ATEM
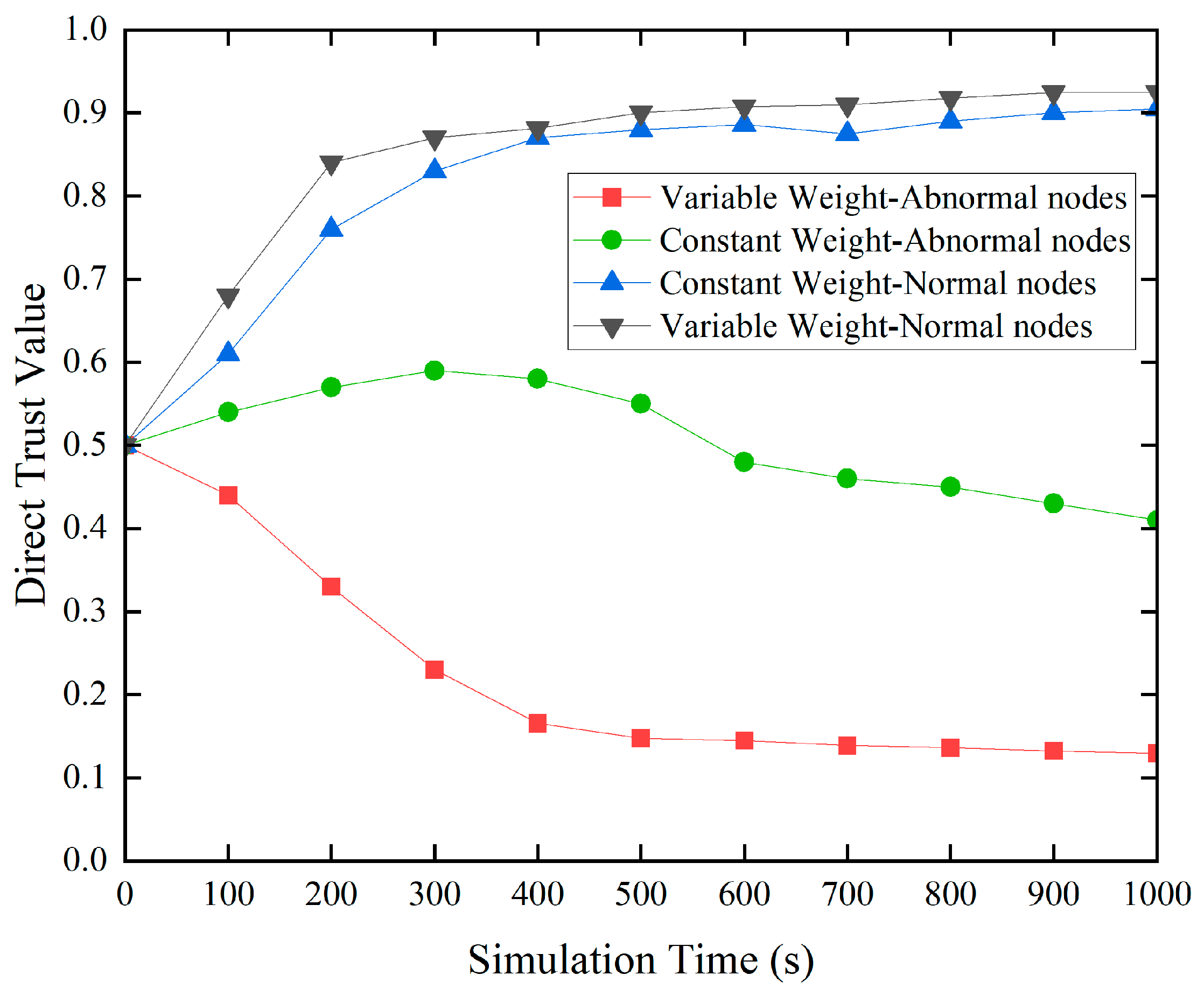
5.1.1. Variable Weight and Constant Weight
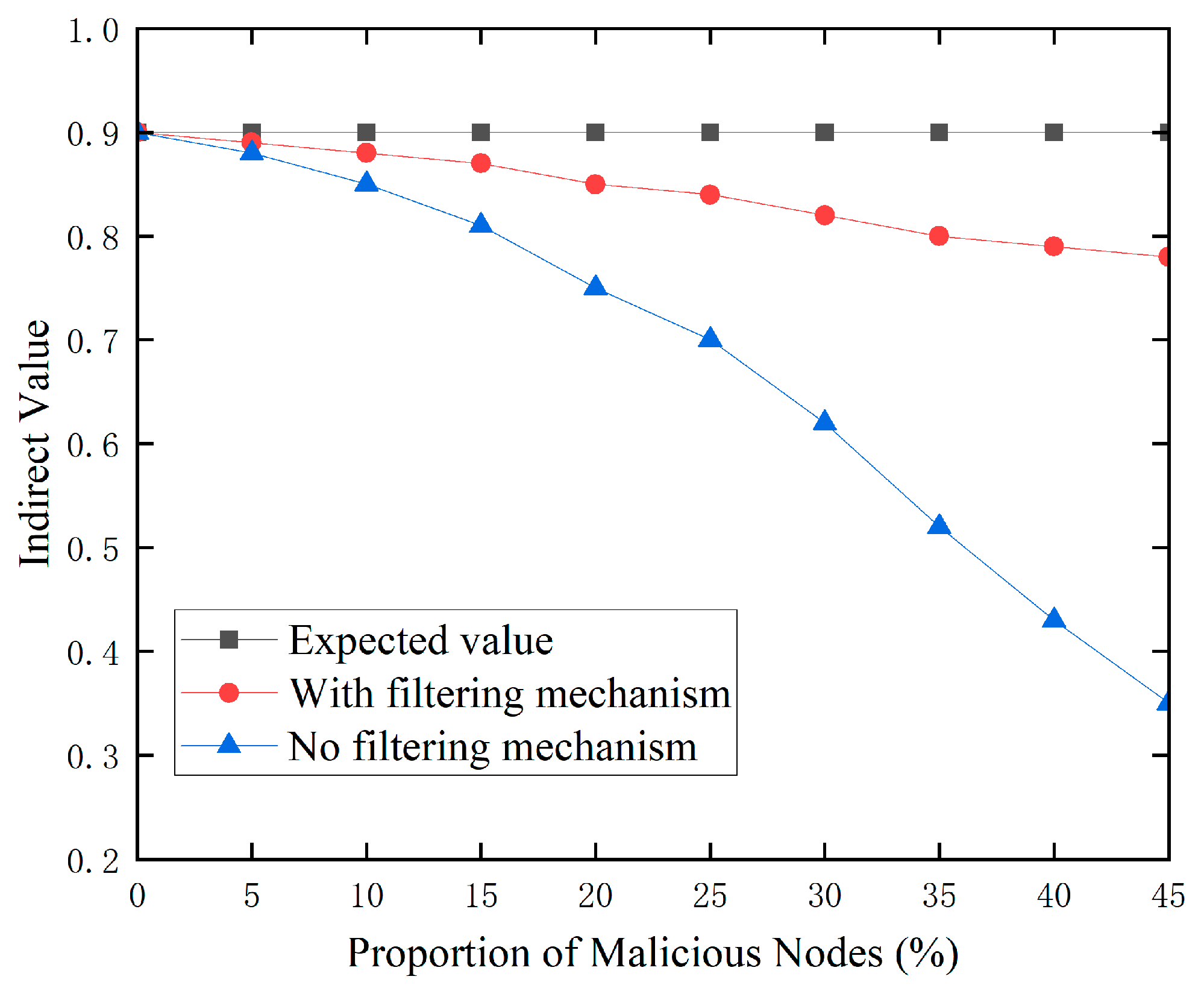
5.1.2. Recommendation Filtering Mechanism
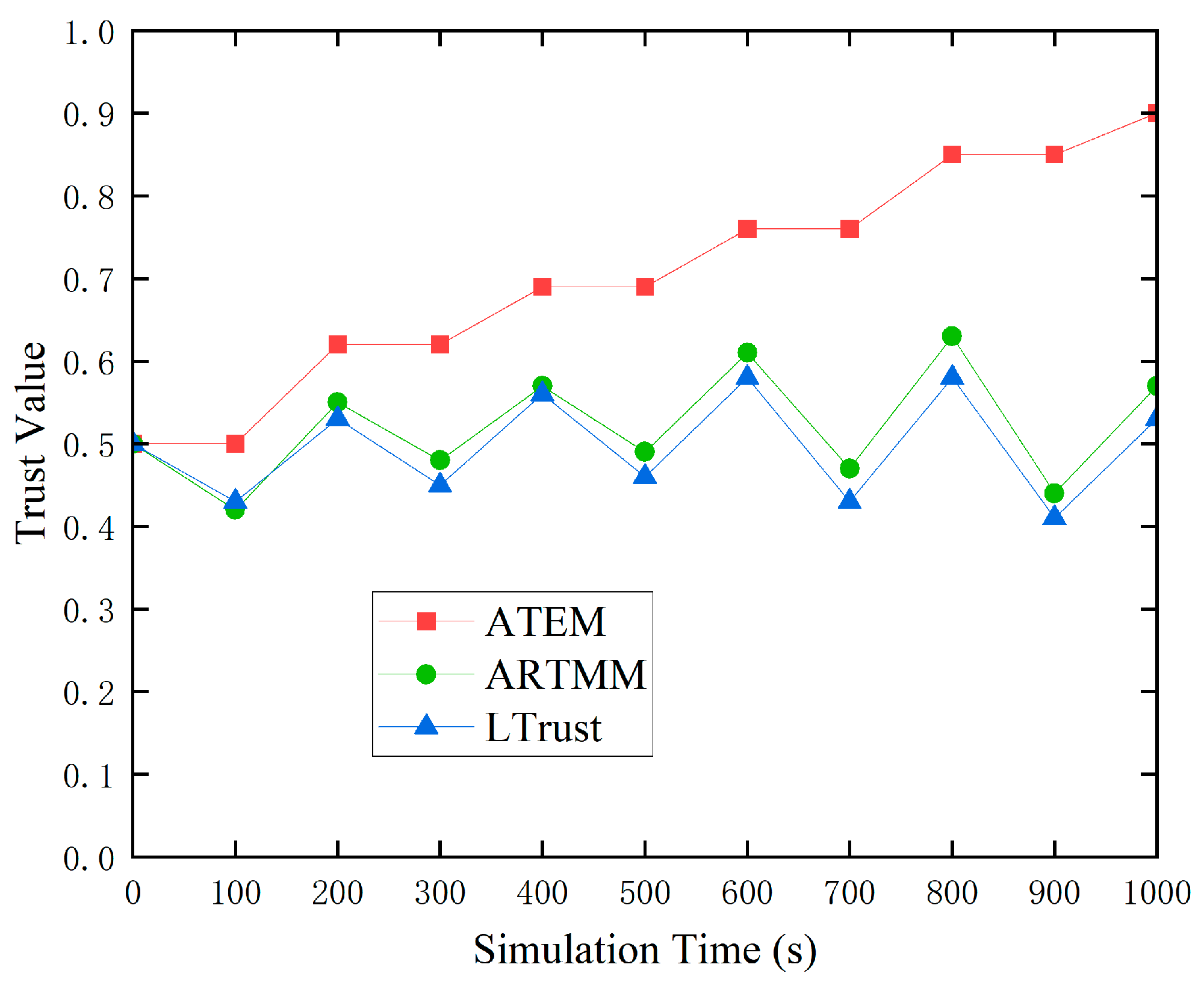
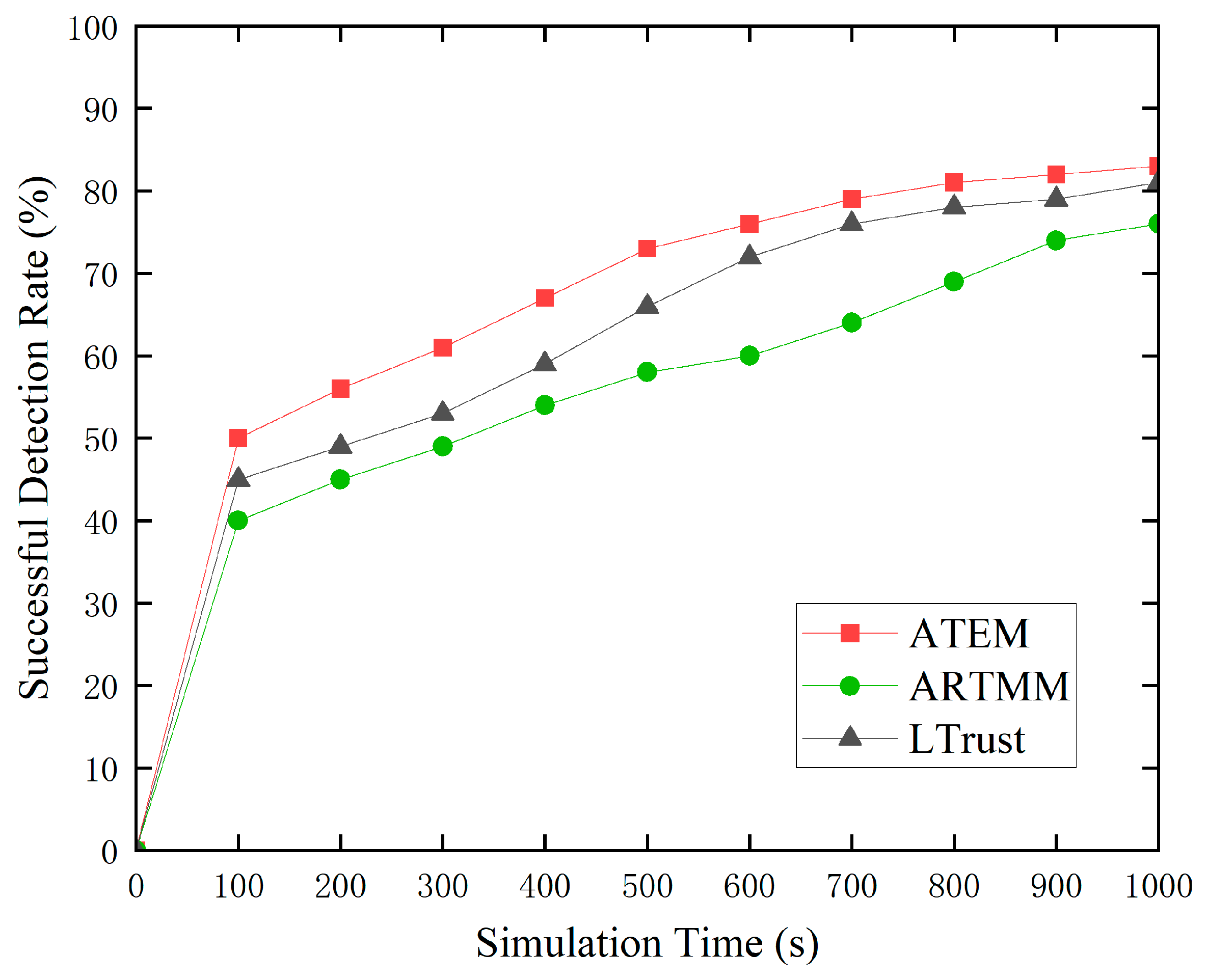
5.2. Comparison to Other Works
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tuna, G.; Gungor, V.C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30, e3350. [Google Scholar] [CrossRef]
- Gupta, O.; Goyal, N.; Anand, D.; Kadry, S.; Nam, Y.; Singh, A. Underwater networked wireless sensor data collection for computational intelligence techniques: Issues, challenges, and approaches. IEEE Access 2020, 8, 122959–122974. [Google Scholar] [CrossRef] [PubMed]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater acoustic modems. IEEE Sens. J. 2015, 16, 4063–4071. [Google Scholar] [CrossRef]
- Han, G.; He, Y.; Jiang, J.; Wang, H.; Peng, Y.; Fan, K. Fault-tolerant trust model for hybrid attack mode in underwater acoustic sensor networks. IEEE Netw. 2020, 34, 330–336. [Google Scholar] [CrossRef]
- Du, J.; Han, G.; Lin, C.; Martínez-García, M. ITrust: An anomaly-resilient trust model based on isolation forest for underwater acoustic sensor networks. IEEE Trans. Mob. Comput. 2020, 21, 1684–1696. [Google Scholar] [CrossRef]
- Du, J.; Han, G.; Lin, C.; Martínez-García, M. LTrust: An adaptive trust model based on LSTM for underwater acoustic sensor networks. IEEE Trans. Wirel. Commun. 2022, 21, 7314–7328. [Google Scholar] [CrossRef]
- Pang, B.; Teng, Z.; Sun, H.; Du, C.; Li, M.; Zhu, W. A malicious node detection strategy based on fuzzy trust model and the abc algorithm in wireless sensor network. IEEE Wirel. Commun. Lett. 2021, 10, 1613–1617. [Google Scholar] [CrossRef]
- Zhang, M.; Feng, R.; Zhang, H.; Su, Y. A recommendation management defense mechanism based on trust model in underwater acoustic sensor networks. Future Gener. Comput. Syst. 2023, 145, 466–477. [Google Scholar] [CrossRef]
- Su, Y.; Mal, S.; Jin, Z.; Fu, X.; Li, Y.; Liu, X. A trust model for underwater acoustic sensor networks based on fast link quality assessment. In Proceedings of the Global Oceans 2020: Singapore–US Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Han, G.; Jiang, J.; Shu, L.; Guizani, M. An attack-resistant trust model based on multidimensional trust metrics in underwater acoustic sensor network. IEEE Trans. Mob. Comput. 2015, 14, 2447–2459. [Google Scholar] [CrossRef]
- Su, Y.; Ma, S.; Zhang, H.; Jin, Z.; Fu, X. A redeemable SVM-DS fusion-based trust management mechanism for underwater acoustic sensor networks. IEEE Sens. J. 2021, 21, 26161–26174. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G.; Wang, F.; Shu, L.; Guizani, M. An efficient distributed trust model for wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 26, 1228–1237. [Google Scholar] [CrossRef]
- Wu, X.; Huang, J.; Ling, J.; Shu, L. BLTM: Beta and LQI based trust model for wireless sensor networks. IEEE Access 2019, 7, 43679–43690. [Google Scholar] [CrossRef]
- Ye, Z.; Wen, T.; Liu, Z.; Song, X.; Fu, C. An efficient dynamic trust evaluation model for wireless sensor networks. J. Sens. 2017, 2017, 7864671. [Google Scholar] [CrossRef]
- Anwar, R.W.; Zainal, A.; Outay, F.; Yasar, A.; Iqbal, S. BTEM: Belief based trust evaluation mechanism for wireless sensor networks. Future Gener. Comput. Syst. 2019, 96, 605–616. [Google Scholar] [CrossRef]
- Sun, B.; Li, D. A comprehensive trust-aware routing protocol with multi-attributes for WSNs. IEEE Access 2017, 6, 4725–4741. [Google Scholar] [CrossRef]
- Alnasser, A.; Sun, H.; Jiang, J. Recommendation-based trust model for vehicle-to-everything (V2X). IEEE Internet Things J. 2019, 7, 440–450. [Google Scholar] [CrossRef]
- Adewuyi, A.A.; Cheng, H.; Shi, Q.; Cao, J.; MacDermott, Á.; Wang, X. CTRUST: A dynamic trust model for collaborative applications in the Internet of Things. IEEE Internet Things J. 2019, 6, 5432–5445. [Google Scholar] [CrossRef]
- Caruso, A.; Paparella, F.; Vieira, L.F.M.; Erol, M.; Gerla, M. The meandering current mobility model and its impact on underwater mobile sensor networks. In Proceedings of the IEEE INFOCOM 2008-The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 221–225. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Network size | 1000 m × 1000 m × 1000 m |
| Number of nodes | 100 |
| Node initial energy | 1000 J |
| Communication radius | 400 m |
| Node deployment method | Random |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Ye, J.; An, F.; Jiang, W. An Adaptive Trust Evaluation Model for Detecting Abnormal Nodes in Underwater Acoustic Sensor Networks. Sensors 2024, 24, 2880. https://doi.org/10.3390/s24092880
Liu C, Ye J, An F, Jiang W. An Adaptive Trust Evaluation Model for Detecting Abnormal Nodes in Underwater Acoustic Sensor Networks. Sensors. 2024; 24(9):2880. https://doi.org/10.3390/s24092880
Chicago/Turabian StyleLiu, Changtao, Jun Ye, Fanglin An, and Weili Jiang. 2024. "An Adaptive Trust Evaluation Model for Detecting Abnormal Nodes in Underwater Acoustic Sensor Networks" Sensors 24, no. 9: 2880. https://doi.org/10.3390/s24092880
APA StyleLiu, C., Ye, J., An, F., & Jiang, W. (2024). An Adaptive Trust Evaluation Model for Detecting Abnormal Nodes in Underwater Acoustic Sensor Networks. Sensors, 24(9), 2880. https://doi.org/10.3390/s24092880