
PCTC-Net: A Crack Segmentation Network with Parallel Dual Encoder Network Fusing Pre-Conv-Based Transformers and Convolutional Neural Networks



Abstract
1. Introduction
2. Related Work
2.1. CNN Models
2.2. CNN and Transformer Fusion Models
2.3. Loss Function
3. Methodology
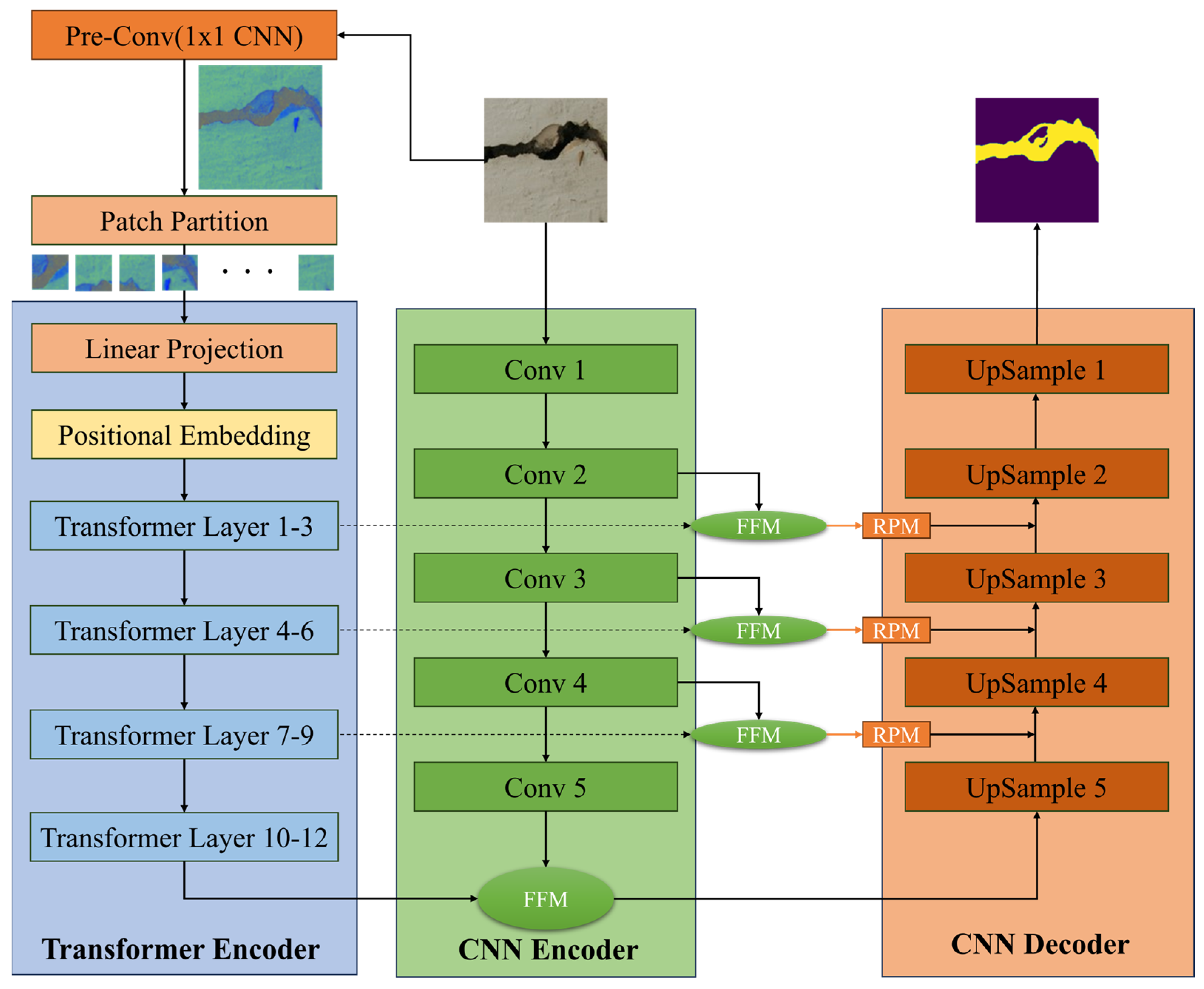
3.1. PCTC-Net
3.2. Pre-Conv Module
4. Dataset and Experiment Environment
5. Experimental Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Medina, R.; Gómez-García-Bermejo, J.; Zalama, E. Automated Visual Inspection of Road Surface Cracks. In Proceedings of the 27th ISARC, Bratislava, Slovakia, 25–27 June 2010; International Association for Automation and Robotics in Construction (IAARC): Bratislava, Slovakia, 2010; pp. 154–164. [Google Scholar] [CrossRef]
- Tang, F.; Han, C.; Ma, T.; Chen, T.; Jia, Y. Quantitative analysis and visual presentation of segregation in asphalt mixture based on image processing and BIM. Autom. Construct. 2021, 121, 103461. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, G.; Ding, Y.; Wu, B.; Lu, G. A Vision-Based Active Learning Convolutional Neural Network Model for Concrete Surface Crack Detection. Adv. Struct. Eng. 2020, 23, 2952–2964. [Google Scholar] [CrossRef]
- Koch, C.; Georgieva, K.; Kasireddy, V.; Akinci, B.; Fieguth, P. A review on computer vision based defect detection and condition assessment of concrete and asphalt civil infrastructure. Adv. Eng. Inform. 2015, 29, 196–210. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 3, 12–22. [Google Scholar] [CrossRef]
- Ye, X.W.; Jin, T.; Yun, C.B. A review on deep learning based structural health monitoring of civil infrastructures. Smart Struct. Syst. 2019, 24, 567–586. [Google Scholar] [CrossRef]
- Hu, W.; Wang, W.; Ai, C.; Wang, J.; Wang, W.; Meng, X.; Liu, J.; Tao, H.; Qiu, S. Machine vision-based surface crack analysis for transportation infrastructure. Autom. Constr. 2021, 132, 103973. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Alfarrarjeh, A.; Trivedi, D.; Kim, S.H.; Shahabi, C. A Deep learning approach for road damage detection from smartphone images. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 5201–5204. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4510–4520. [Google Scholar] [CrossRef]
- Maeda, H.; Sekimoto, Y.; Seto, T.; Kashiyama, T.; Omata, H. Road damage detection and classification using deep neural networks with smartphone images. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 1127–1141. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Volume 18, pp. 234–241. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Zheng, S.; Lu, J.; Zhao, H.; Zhu, X.; Luo, Z.; Wang, Y.; Fu, Y.; Feng, J.; Xiang, T.; Torr, P.H.; et al. Rethinking semantic segmentation from a sequence-to-sequence perspective with transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 19–25 June 2021; pp. 6881–6890. [Google Scholar] [CrossRef]
- Xie, E.; Wang, W.; Yu, Z.; Anandkumar, A.; Alvarez, J.M.; Luo, P. SegFormer: Simple and Efficient Design for Semantic Segmentation with Transformers. Adv. Neural Inf. Process. Syst. 2021, 34, 12077–12090. [Google Scholar] [CrossRef]
- Xiang, C.; Guo, J.; Cao, R.; Deng, L. A Crack-Segmentation Algorithm Fusing Transformers and Convolutional Neural Networks for Complex. Autom. Constr. 2023, 152, 104894. [Google Scholar] [CrossRef]
- Han, K.; Wang, Y.; Chen, H.; Chen, X.; Guo, J.; Liu, Z.; Tang, Y.; Xiao, A.; Xu, C.; Xu, Y.; et al. A Survey on Vision Transformer. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 87–110. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Zhang, Q.; Zhang, J.; Tao, D. Vitae: Vision transformer advanced by exploring intrinsic inductive bias. Adv. Neural Inf. Process. Syst. 2021, 34, 28522–28535. [Google Scholar] [CrossRef]
- Wang, W.; Su, C. Automatic Concrete Crack Segmentation Model Based on Transformer. Autom. Constr. 2022, 139, 104275. [Google Scholar] [CrossRef]
- Soukup, D.; Huber-Mörk, R. Convolutional neural networks for steel surface defect detection from photometric stereo images. In International Symposium on Visual Computing; Springer: Berlin, Germany, 2014; pp. 668–677. [Google Scholar] [CrossRef]
- Katsamenis, I.; Doulamis, N.; Doulamis, A.; Protopapadakis, E.; Voulodimos, A. Simultaneous Precise Localization and Classification of metal rust defects for robotic-driven maintenance and prefabrication using residual attention U-Net. Autom. Constr. 2022, 137, 104182. [Google Scholar] [CrossRef]
- Atha, D.J.; Jahanshahi, M.R. Evaluation of deep learning approaches based on convolutional neural networks for corrosion detection. Struct. Health Monit. 2018, 17, 1110–1128. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, J.; Lu, X.; Xie, R.; Li, L. DeepCrack: A Deep Hierarchical Feature Learning Architecture for Crack Segmentation. Neurocomputing 2019, 338, 139–153. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Xie, S.; Gallagher, P.; Zhang, Z.; Tu, Z. Deeply-supervised nets. In Proceedings of the Artificial Intelligence and Statistics, San Diego, CA, USA, 9–12 May 2015; pp. 562–570. [Google Scholar] [CrossRef]
- Hou, Q.; Zhang, L.; Cheng, M.M.; Feng, J. Strip Pooling: Rethinking Spatial Pooling for Scene Parsing. In Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020. [Google Scholar] [CrossRef]
- Katsamenis, I.; Protopapadakis, E.; Bakalos, N.; Doulamis, A.; Doulamis, N.; Voulodimos, A. A Few-Shot Attention Recurrent Residual U-Net for Crack Segmentation. arXiv 2023, arXiv:2303.01582. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar] [CrossRef]
- Khan, S.; Naseer, M.; Hayat, M.; Zamir, S.W.; Khan, F.S.; Shah, M. Transformers in Vision: A Survey. ACM Comput. Surv. (CSUR) 2022, 54, 1–41. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:2010.11929. [Google Scholar] [CrossRef]
- Shao, R.; Shi, Z.; Yi, J.; Chen, P.-Y.; Hsieh, C.-J. On the Adversarial Robustness of Vision Transformers. arXiv 2021, arXiv:2103.15670. [Google Scholar] [CrossRef]
- Chen, J.; Lu, Y.; Yu, Q.; Luo, X.; Adeli, E.; Wang, Y.; Lu, L.; Yuille, A.L.; Zhou, Y. Transunet: Transformers Make Strong Encoders for Medical Image Segmentation. arXiv 2021, arXiv:2102.04306. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L. Detection of Pavement Cracks by Deep Learning Models of Transformer and UNet. arXiv 2023, arXiv:2304.12596. [Google Scholar] [CrossRef]
- Wu, H.; Chen, S.; Chen, G.; Wang, W.; Lei, B.; Wen, Z. FAT-Net: Feature adaptive transformers for automated skin lesion segmentation. Med. Image Anal. 2022, 76, 102327. [Google Scholar] [CrossRef] [PubMed]
- Ali, R.; Chuah, J.H.; Talip, M.S.A.; Mokhtar, N.; Shoaib, M.A. Crack Segmentation Network using Tversky Loss Function with Variable Alpha and Beta. In Proceedings of the 2022 IEEE Symposium on Industrial Electronics & Applications (ISIEA), Langkawi Island, Malaysia, 16–17 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Jadon, S. A Survey of Loss Functions for Semantic Segmentation. In Proceedings of the 2020 IEEE Conference on Computational Intelligence in Bioinformatics and Computational Biology (CIBCB), Viña del Mar, Chile, 27–29 October 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Yi-de, M.; Qing, L.; Zhi-bai, Q. Automated image segmentation using improved PCNN model based on cross-entropy. In Proceedings of the 2004 International Symposium on Intelligent Multimedia, Video and Speech Processing, Hong Kong, China, 20–22 October 2004; pp. 743–746. [Google Scholar] [CrossRef]
- Nguyen, Q.D.; Thai, H.T. Crack segmentation of imbalanced data: The role of loss functions. Eng. Struct. 2023, 297, 116988. [Google Scholar] [CrossRef]
- Fang, J.F.; Qu, B.; Yuan, Y. Distribution Equalization Learning Mechanism for Road Crack Detection. Neurocomputing 2021, 424, 193–204. [Google Scholar] [CrossRef]
- Yeung, M.; Sala, E.; Schönlieb, C.B.; Rundo, L. Unified focal loss: Generalising dice and cross entropy-based losses to handle class imbalanced medical image segmentation. Comput. Med. Imaging Graph. 2021, 95, 102026. [Google Scholar] [CrossRef] [PubMed]
- Taghanaki, S.A.; Zheng, Y.; Zhou, S.K.; Georgescu, B.; Sharma, P.; Xu, D.; Comaniciu, D.; Hamarneh, G. Combo loss: Handling input and output imbalance in multi-organ segmentation. Comput. Med Imaging Graph. 2019, 75, 24–33. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L.; Yu, S.; Prokhorov, D.; Mei, X.; Ling, H. Feature Pyramid and Hierarchical Boosting Network for Pavement Crack Detection. arXiv 2019, arXiv:1901.06340. [Google Scholar] [CrossRef]
- Kulkarni, S.; Singh, S.; Balakrishnan, D.; Sharma, S.; Devunuri, S.; Korlapati, S.C.R. CrackSeg9k: A collection and benchmark for crack segmentation datasets and frameworks. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 179–195. [Google Scholar] [CrossRef]
- Zhou, S.; Song, W. Deep learning-based roadway crack classification using laser-scanned range images: A comparative study on hyperparameter selection. Autom. Constr. 2020, 114, 103171. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pre-Conv Size | Precision | Recall | F1-Score |
|---|---|---|---|
| X | 85.46% | 87.16% | 86.11% |
| 1 × 1 | 86.62% | 88.01% | 87.31% |
| 3 × 3 | 85.48% | 87.68% | 86.57% |
| 5 × 5 | 86.53% | 87.59% | 87.06% |
| Model | Batch Size | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|---|
| PCTC-Net | 3 | 86.62 | 88.01 | 87.31 |
| 5 | 85.88 | 88.03 | 86.94 | |
| 10 | 85.33 | 86.30 | 85.81 | |
| DTrC-Net [17] | 3 | 85.20 | 87.10 | 86.14 |
| 5 | 85.08 | 87.82 | 86.43 | |
| 10 | 83.55 | 87.40 | 85.43 |
| Loss Function | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|
| Dice | 92.21 | 81.43 | 86.48 |
| 0.75Dice + 0.25BCE | 92.47 | 82.79 | 87.36 |
| 0.5Dice + 0.5Focal | 86.62 | 88.01 | 87.31 |
| 0.75Dice + 0.25Focal | 86.10 | 87.48 | 86.78 |
| Model | Transformer Layer | Precision (%) | Recall (%) | F1-Score (%) | FPS |
|---|---|---|---|---|---|
| PCTC-Net | 4 | 86.83 | 85.99% | 86.41% | 244 |
| 8 | 86.81 | 86.82% | 86.82% | 224 | |
| 12 | 86.61 | 88.03% | 87.31% | 215 | |
| DTrC-Net [17] | 4 | 89.82 | 78.96% | 84.04% | 244 |
| 8 | 89.39 | 78.36% | 83.51% | 224 | |
| 12 | 87.23 | 86.27% | 86.75% | 215 |
| Type | Model | Precision (%) | Recall (%) | F1-Score (%) | Model Parameters (M) | Times (ms) |
|---|---|---|---|---|---|---|
| Single-encoder | FCN [12] | 85.66 | 85.75 | 85.71 | 13.334 | 1.113 |
| U-Net [13] | 87.66 | 84.24 | 85.91 | 31.037 | 2.728 | |
| Dual-encoder | PCTC-Net | 86.61 | 88.03 | 87.31 | 66.162 | 4.642 |
| FAT-Net [35] | 85.85 | 86.16 | 86.01 | 36.543 | 3.609 |
| Model | Dataset | Precision (%) | Recall (%) | F1-Score (%) |
|---|---|---|---|---|
| PCTC-Net | DeepCrack | 86.62 | 88.01 | 87.31 |
| Crack500 | 64.92 | 85.83 | 73.92 | |
| Crackseg9k | 72.23 | 87.38 | 79.08 | |
| DTrC-Net [17] | DeepCrack | 85.20 | 87.10 | 86.14 |
| Crack500 | 63.68 | 87.21 | 73.61 | |
| Crackseg9k | 71.98 | 85.33 | 78.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, J.-H.; Choi, G.; Kim, Y.-H.; Kim, W.-Y. PCTC-Net: A Crack Segmentation Network with Parallel Dual Encoder Network Fusing Pre-Conv-Based Transformers and Convolutional Neural Networks. Sensors 2024, 24, 1467. https://doi.org/10.3390/s24051467
Moon J-H, Choi G, Kim Y-H, Kim W-Y. PCTC-Net: A Crack Segmentation Network with Parallel Dual Encoder Network Fusing Pre-Conv-Based Transformers and Convolutional Neural Networks. Sensors. 2024; 24(5):1467. https://doi.org/10.3390/s24051467
Chicago/Turabian StyleMoon, Ji-Hwan, Gyuho Choi, Yu-Hwan Kim, and Won-Yeol Kim. 2024. "PCTC-Net: A Crack Segmentation Network with Parallel Dual Encoder Network Fusing Pre-Conv-Based Transformers and Convolutional Neural Networks" Sensors 24, no. 5: 1467. https://doi.org/10.3390/s24051467
APA StyleMoon, J.-H., Choi, G., Kim, Y.-H., & Kim, W.-Y. (2024). PCTC-Net: A Crack Segmentation Network with Parallel Dual Encoder Network Fusing Pre-Conv-Based Transformers and Convolutional Neural Networks. Sensors, 24(5), 1467. https://doi.org/10.3390/s24051467