
Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework

Abstract
1. Introduction
2. Problem Formulation
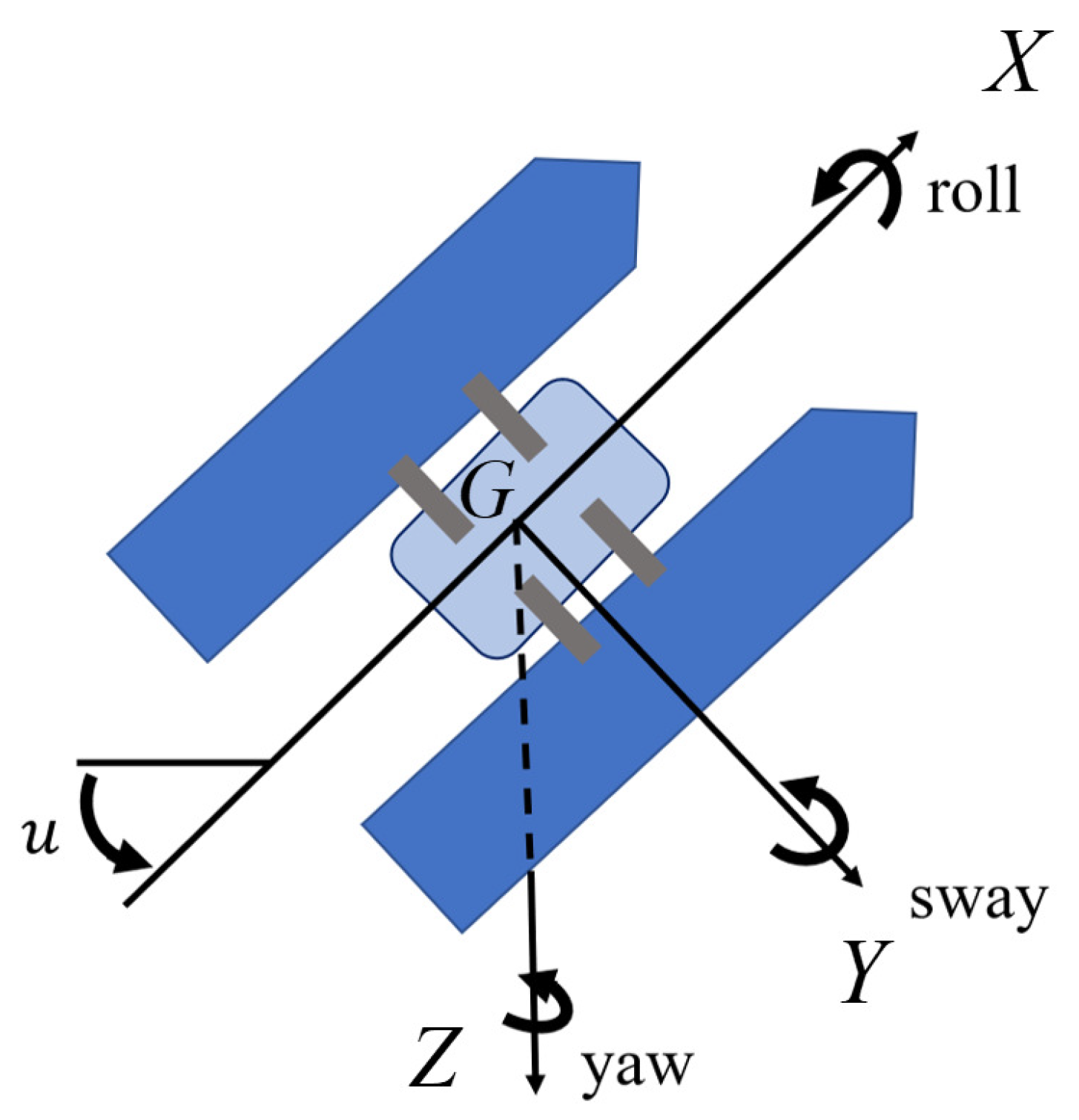
2.1. Modeling of the USV Steering Motion Model
2.2. Binary Coding Scheme
2.3. Design Objective
3. Main Result
3.1. Design of Robust Set-Membership Estimator
3.2. Optimization Problem
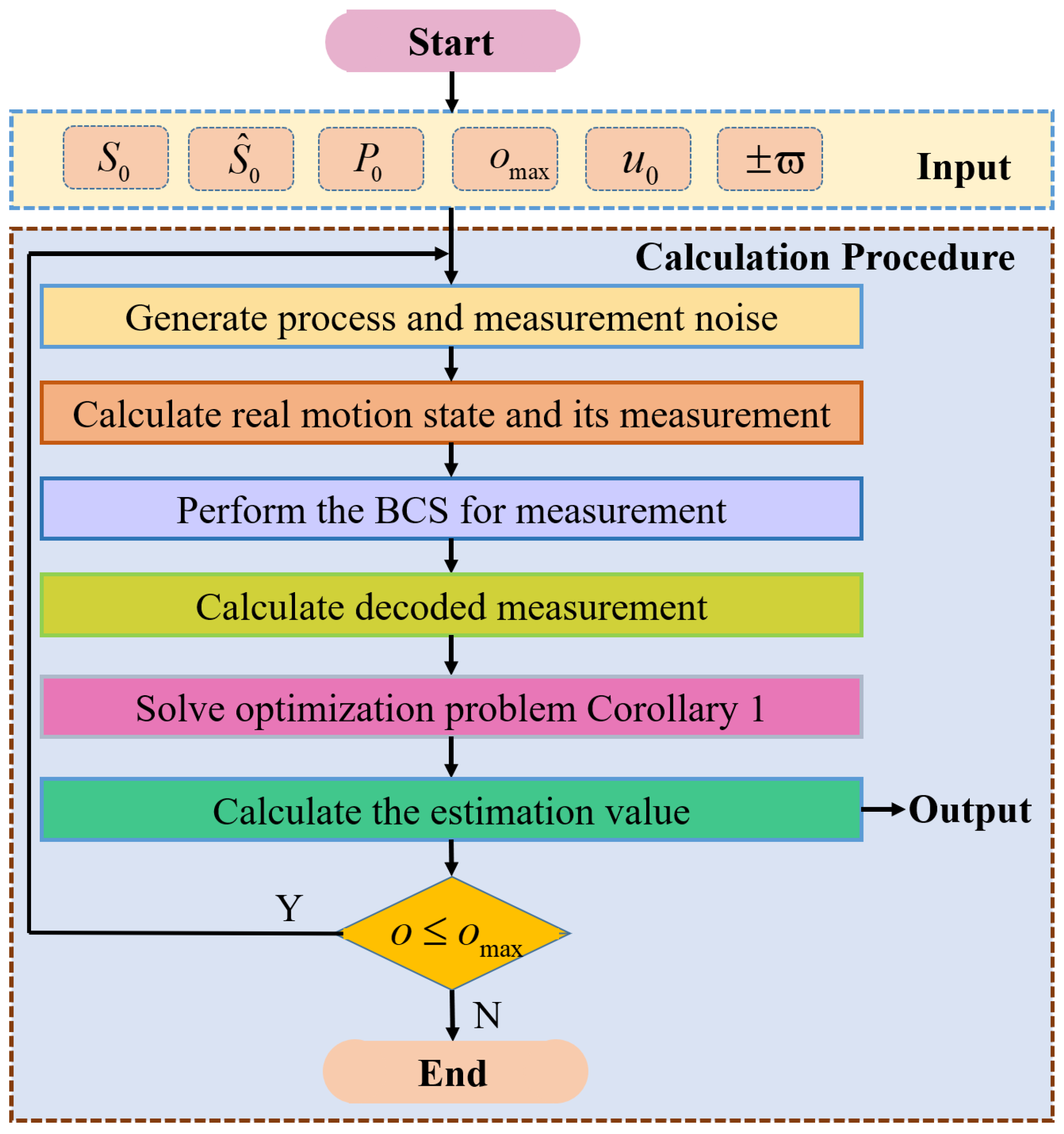
| Algorithm 1: Set-membership estimation framework for USV steering motion |
|
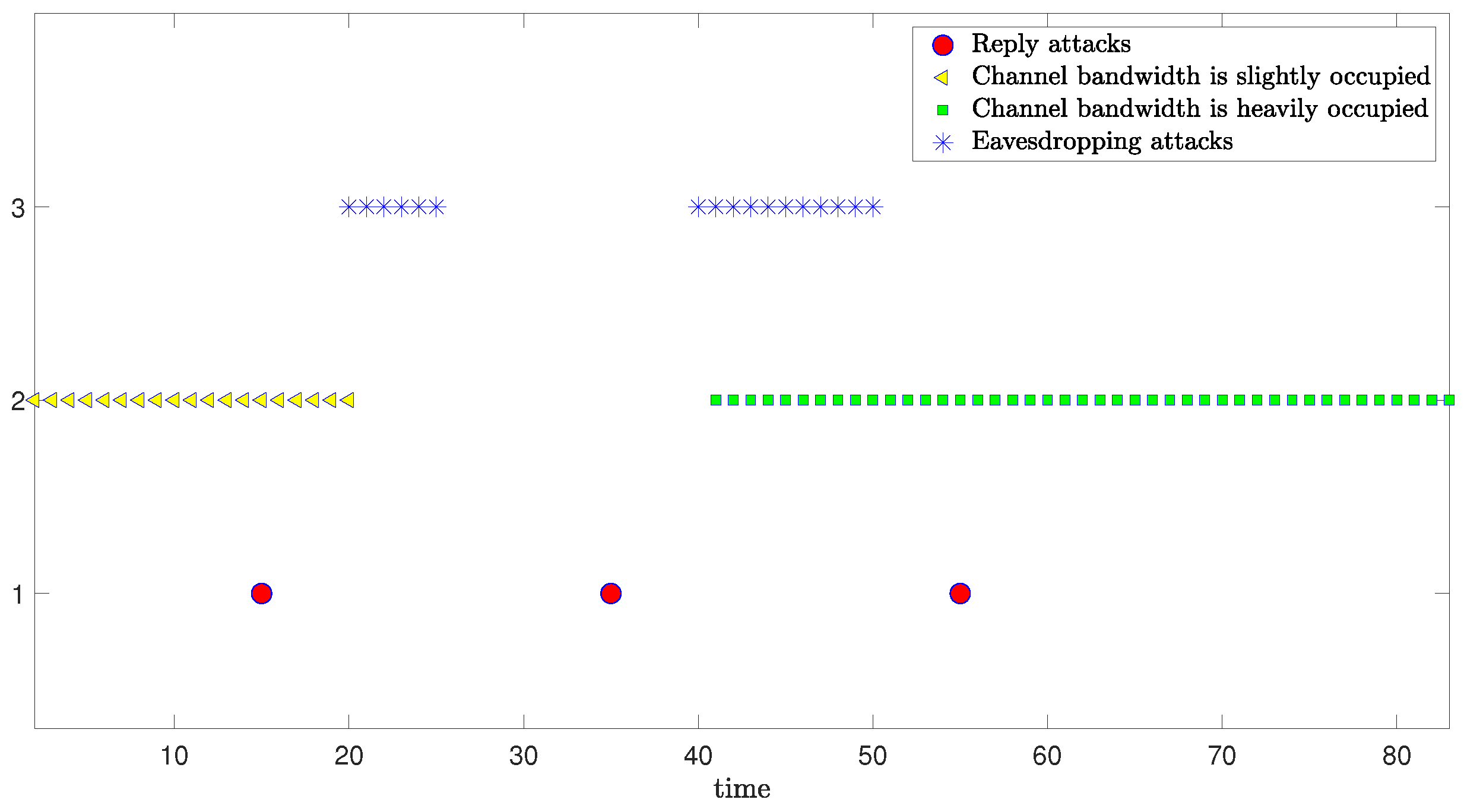
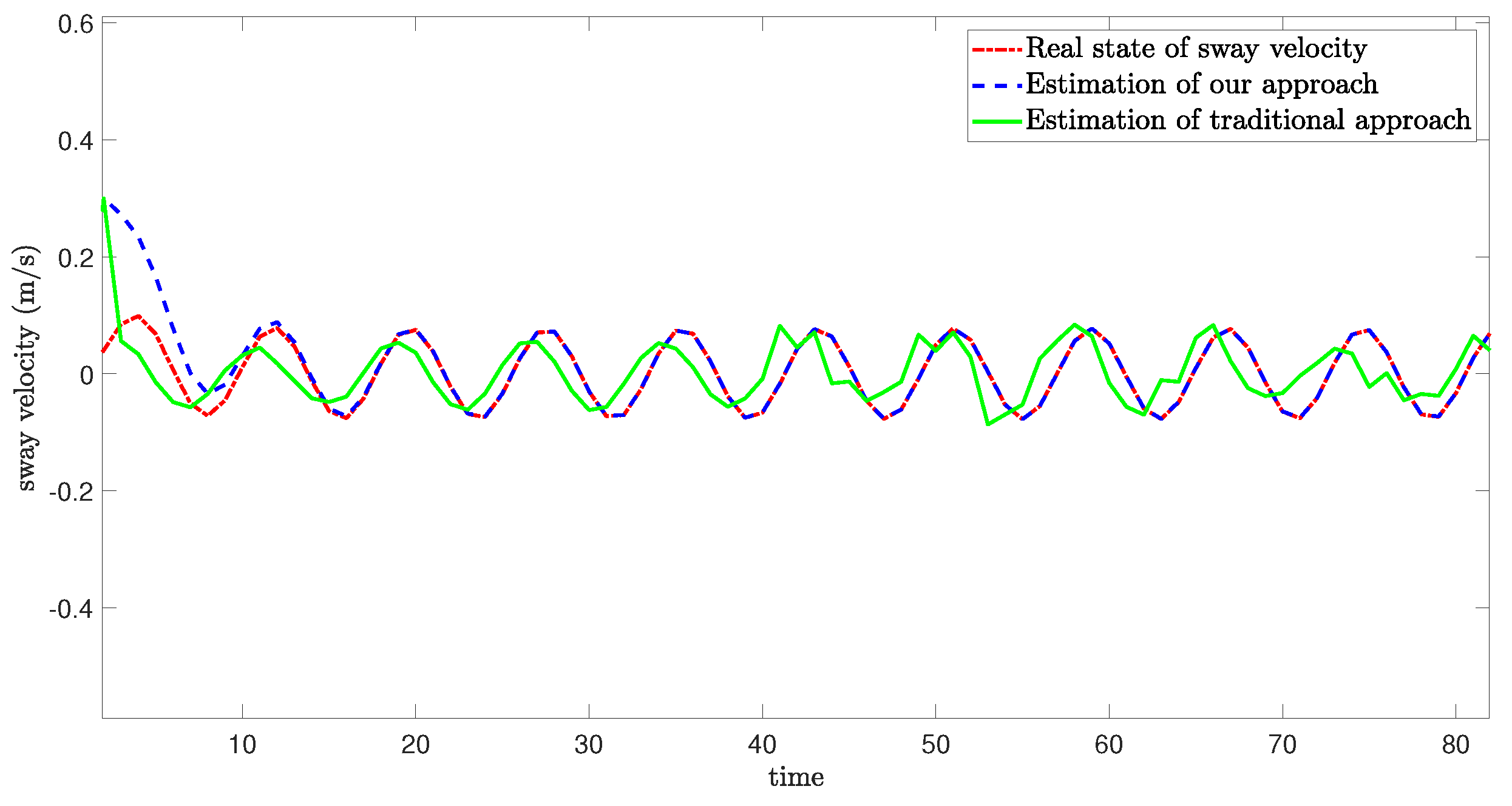
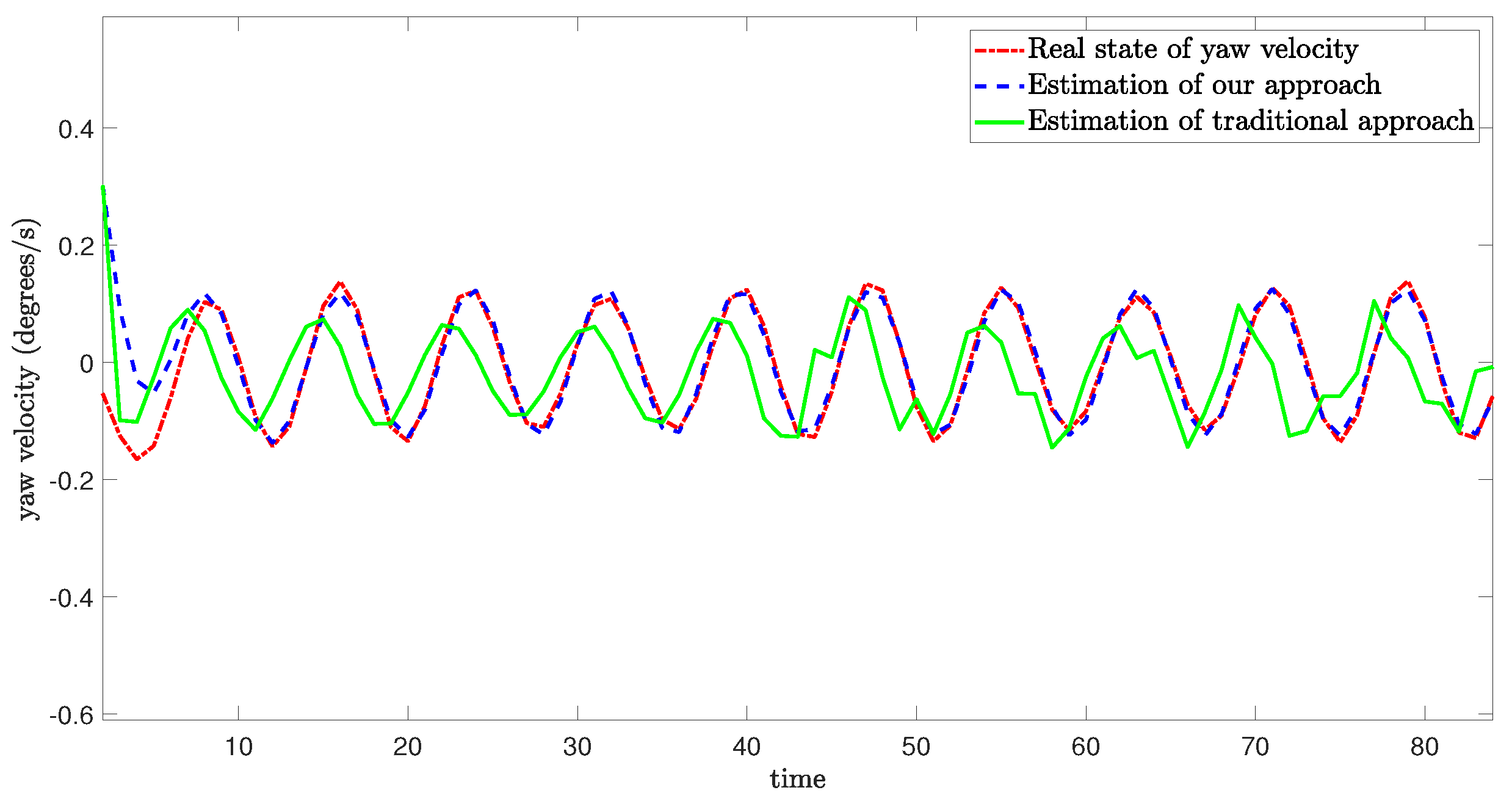
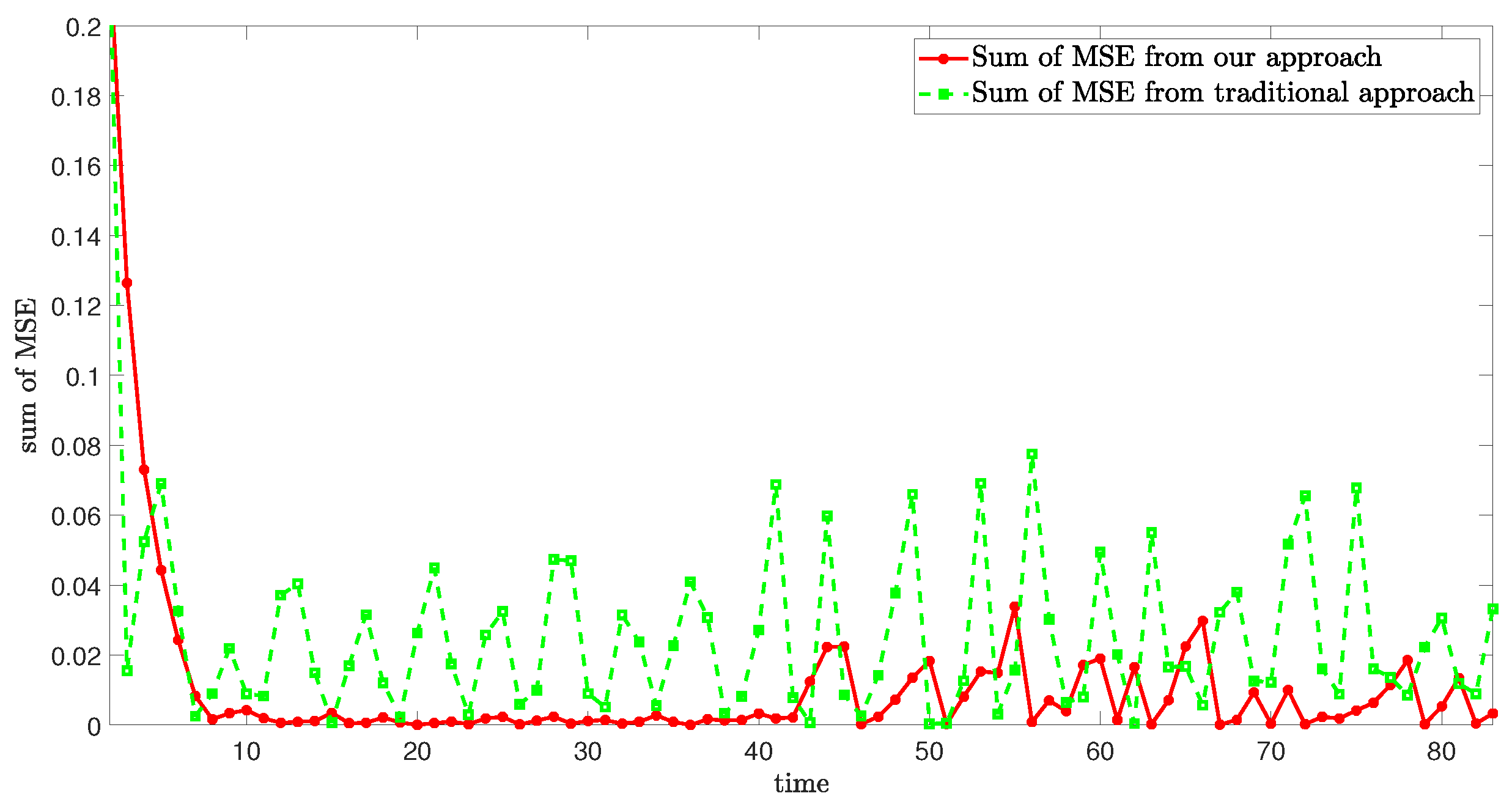
4. Simulation Experiment
4.1. Numerical Simulation
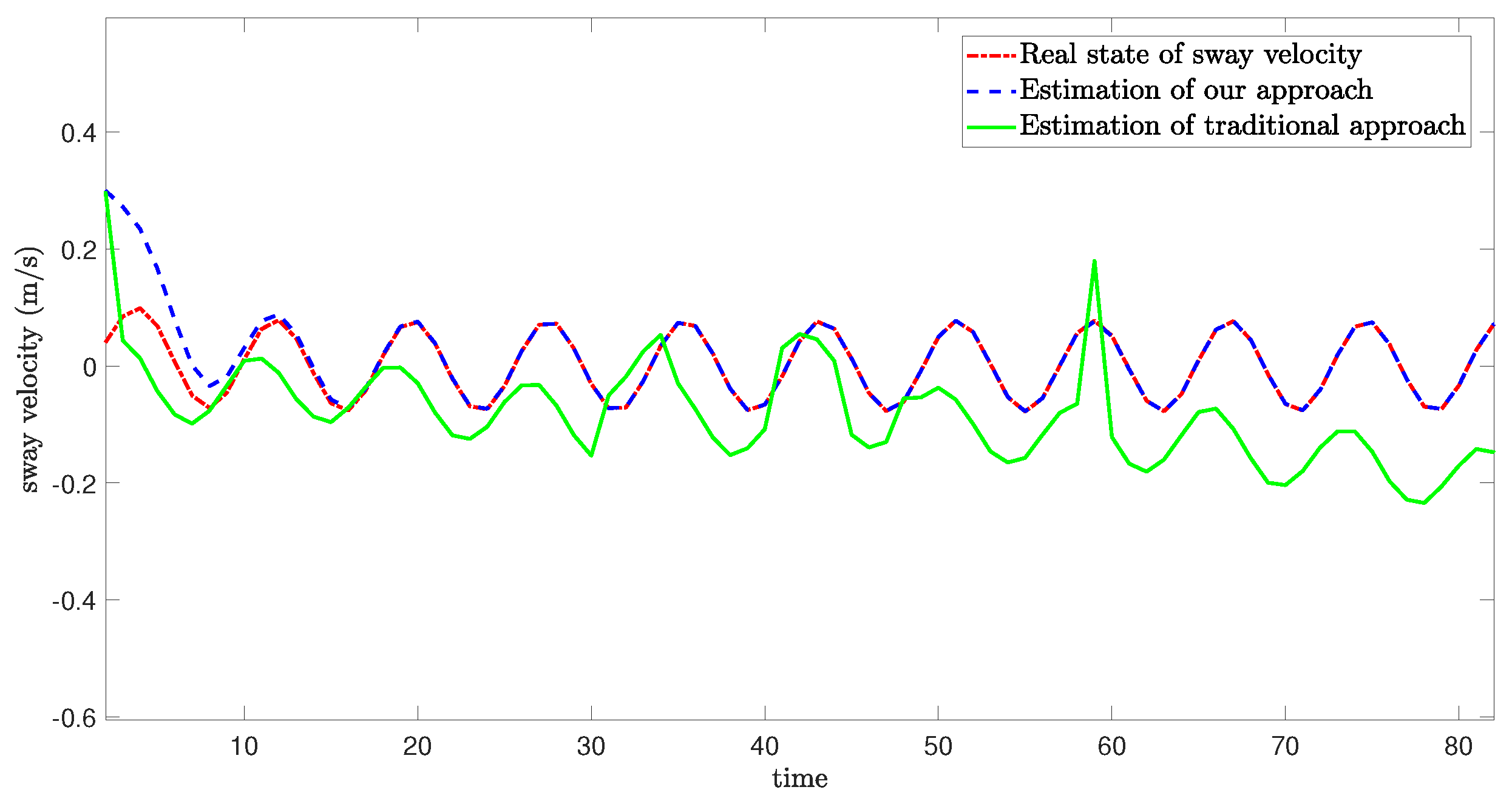
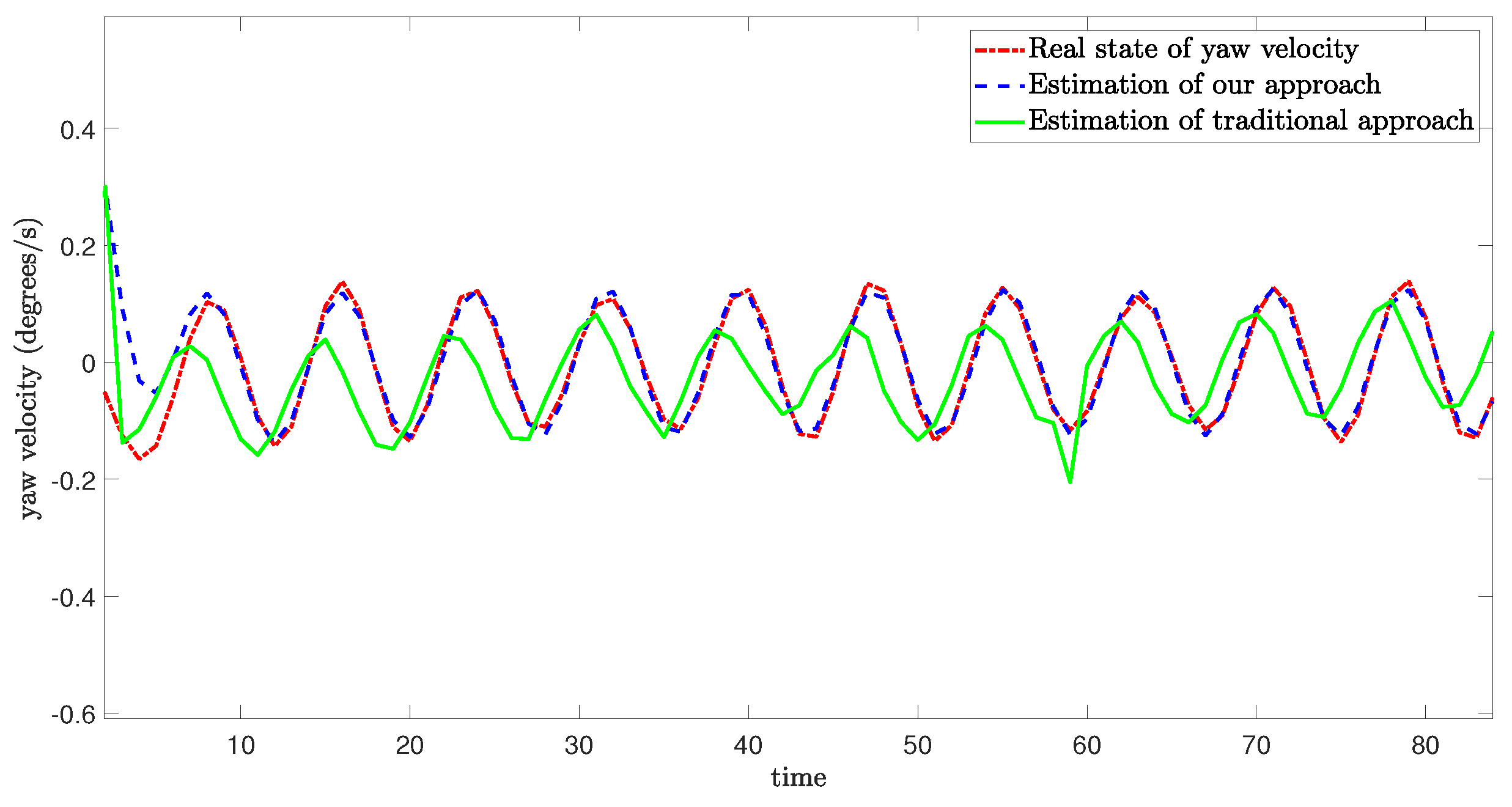
4.2. The Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Goulon, C.; Meaux, O.L.; Vincent-Falquet, R.; Guillard, J. Hydroacoustic Autonomous boat for Remote fish detection in LakE (HARLE), an unmanned autonomous surface vehicle to monitor fish populations in lakes. Limnol. Oceanogr.-Methods 2021, 19, 280–292. [Google Scholar] [CrossRef]
- Song, L.; Chen, H.; Xiong, W.; Dong, Z.; Hu, K. Method of Emergency Collision Avoidance for Unmanned Surface Vehicle (USV) based on Motion Ability Database. Pol. Marit. Res. 2019, 26, 55–67. [Google Scholar] [CrossRef]
- Xiong, Y.; Zhu, H.; Pan, L.; Wang, J. Research on Intelligent Trajectory Control Method of Water Quality Testing Unmanned Surface Vessel. J. Mar. Sci. Eng. 2022, 10, 55–67. [Google Scholar] [CrossRef]
- Abrougui, H.; Nejim, S.; Hachicha, S.; Zaoui, C.; Dallagi, H. Modeling, parameter identification, guidance and control of an unmanned surface vehicle with experimental results. Ocean Eng. 2021, 241, 42–53. [Google Scholar] [CrossRef]
- Cai, M.; He, X.; Zhou, D. Performance-improved finite-time fault-tolerant control for linear uncertain systems with intermittent faults: An overshoot suppression strategy. Int. J. Syst. Sci. 2022, 53, 3408–3425. [Google Scholar] [CrossRef]
- Wen, P.; Li, X.; Hou, N.; Mu, S. Distributed recursive fault estimation with binary encoding schemes over sensor networks. Syst. Sci. Control Eng. 2022, 10, 417–427. [Google Scholar] [CrossRef]
- Song, X.; Rong, L.; Li, B.; Wang, Z.; Li, J. Joint state and fault estimation for nonlinear systems with missing measurements and random component faults under Round-Robin Protocol. Int. J. Electr. Power Energy Syst. 2023, 154, 109–437. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Aubry, A.; Carotenuto, V. Rician MIMO Channel- and Jamming-Aware Decision Fusion. IEEE Trans. Signal Process. 2017, 65, 3866–3880. [Google Scholar] [CrossRef]
- Bao, G.; Ma, L.; Yi, X. Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: A survey. Syst. Sci. Control Eng. 2022, 10, 539–551. [Google Scholar] [CrossRef]
- Li, W.; Niu, Y.; Cao, Z. Event-triggered sliding mode control for multi-agent systems subject to channel fading. Int. J. Syst. Sci. 2022, 53, 1233–1244. [Google Scholar] [CrossRef]
- Caballero-Aguila, R.; Hermoso-Carazo, A.; Linares-Pérez, J. Networked fusion estimation with multiple uncertainties and time-correlated channel noise. Inf. Fusion 2022, 53, 1233–1244. [Google Scholar] [CrossRef]
- Wang, F.; Liang, J.; Lam, J.; Yang, J.; Zhao, C. Robust Filtering for 2-D Systems with Uncertain-Variance Noises and Weighted Try-Once-Discard Protocols. IEEE Trans. Syst. Man Cybern.-Syst. 2023, 53, 2914–2924. [Google Scholar] [CrossRef]
- Li, X.; Feng, S.; Hou, N.; Wang, R.; Li, H.; Gao, M. Surface microseismic data denoising based on sparse autoencoder and Kalman filter. Syst. Sci. Control Eng. 2022, 10, 616–628. [Google Scholar] [CrossRef]
- Li, G.; Liu, Z.; Zhang, J.; Zheng, L. Robust predictive control for anti-rolling path following of underactuated surface vessels using adaptive Kalman filter. Int. J. Adv. Robot. Syst. 2019, 16, 324–328. [Google Scholar] [CrossRef]
- Fei, Z.; Wang, X.; Wang, Z. Event-Based Fault Detection for Unmanned Surface Vehicles Subject to Denial-of-Service Attacks. IEEE Trans. Syst. Man Cybern.-Syst. 2022, 52, 3326–3336. [Google Scholar] [CrossRef]
- Wang, Y.; Han, Q. Network-Based Fault Detection Filter and Controller Coordinated Design for Unmanned Surface Vehicles in Network Environments. IEEE Trans. Ind. Inform. 2016, 52, 1753–1765. [Google Scholar] [CrossRef]
- Sharma, S.; Sutton, R. A genetic algorithm based nonlinear guidance and control system for an uninhabited surface vehicle. J. Mar. Eng. Technol. 2013, 12, 29–40. [Google Scholar] [CrossRef]
- Wang, Y.; Han, Q. Network-Based Heading Control and Rudder Oscillation Reduction for Unmanned Surface Vehicles. IEEE Trans. Control Syst. Technol. 2017, 25, 1609–1620. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, Y.; Chen, J.; Zheng, X. A quantized set-membership estimation-based heading control method of unmanned surface vessels under unknown-but-bounded wave-induced disturbances. Asian J. Control 2023, 25, 3105–3118. [Google Scholar] [CrossRef]
- Chen, H.; Li, Y.; Liu, C.; Xiao, Z.; Rao, H. Set-Membership State Estimation for Unmanned Surface Vehicle Steering Motion with Try-Once-Discard Protocol. IEEE Sens. J. 2023, 23, 14592–14600. [Google Scholar] [CrossRef]
- Hu, J.; Yang, Y.; Liu, H.; Chen, D.; Du, J. Non-fragile set-membership estimation for sensor-saturated memristive neural networks via weighted try-once-discard protocol. IET Control Theory Appl. 2020, 14, 1671–1680. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, J.; Chen, D.; Wei, Y.; Du, J. Non-fragile Suboptimal Set-membership Estimation for Delayed Memristive Neural Networks with Quantization via Maximum-error-first Protocol. Int. J. Control Autom. Syst. 2020, 18, 1904–1914. [Google Scholar] [CrossRef]
- Wu, W.; Peng, Z.; Wang, D.; Liu, L.; Han, Q. Network-Based Line-of-Sight Path Tracking of Underactuated Unmanned Surface Vehicles with Experiment Results. IEEE Trans. Cybern. 2022, 52, 10937–10947. [Google Scholar] [CrossRef] [PubMed]
- Deng, L.; Guo, T.; Wang, H.; Chi, Z.; Wu, Z.; Yuan, R. Obstacle Detection of Unmanned Surface Vehicle Based on Lidar Point Cloud Data. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA , 17–20 October 2022; Volume 23, pp. 1–8. [Google Scholar] [CrossRef]
- Gao, S.; Peng, Z.; Liu, L.; Wang, D.; Han, Q. Fixed-Time Resilient Edge-Triggered Estimation and Control of Surface Vehicles for Cooperative Target Tracking Under Attacks. IEEE Trans. Intell. Veh. 2023, 8, 14592–14600. [Google Scholar] [CrossRef]
- Liu, L.; Ma, L.; Zhang, F.; Bo, Y. Distributed non-fragile set-membership filtering for nonlinear systems under fading channels and bias injection attacks. Int. J. Syst. Sci. 2021, 52, 1192–1205. [Google Scholar] [CrossRef]
- Liu, L.; Ma, L.; Wang, Y.; Zhang, J.; Bo, Y. Distributed set-membership filtering for time-varying systems under constrained measurements and replay attacks. J. Frankl. Inst.-Eng. Appl. Math. 2023, 357, 4983–5003. [Google Scholar] [CrossRef]
- Li, X.; Wei, G.; Wang, L. Distributed set-membership filtering for discrete-time systems subject to denial-of-service attacks and fading measurements: A zonotopic approach. Inf. Sci. 2021, 547, 49–67. [Google Scholar] [CrossRef]
- Yi, X.; Yu, H.; Wang, P.; Liu, S.; Ma, L. Encoding–decoding-based secure filtering for neural networks under mixed attacks. Neurocomputing 2022, 508, 71–78. [Google Scholar] [CrossRef]
- Qu, Y.; Pang, K. State estimation for a class of artificial neural networks subject to mixed attacks: A set-membership method. Neurocomputing 2020, 411, 239–246. [Google Scholar] [CrossRef]
- Ding, D.; Wang, Z.; Han, Q.; Wei, G. Security Control for Discrete-Time Stochastic Nonlinear Systems Subject to Deception Attacks. IEEE Trans. Syst. Man Cybern.-Syst. 2018, 48, 779–789. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.; Xiang, Y.; Ge, H.; Zhang, X. A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing 2018, 275, 1674–1683. [Google Scholar] [CrossRef]
- Qian, W.; Wang, L.; Chen, Z. Local Consensus of Nonlinear Multiagent Systems with Varying Delay Coupling. IEEE Trans. Syst. Man Cybern.-Syst. 2018, 48, 2462–2469. [Google Scholar] [CrossRef]
- Qian, W.; Gao, Y.; Yang, Y. Global Consensus of Multiagent Systems with Internal Delays and Communication Delays. IEEE Trans. Syst. Man Cybern.-Syst. 2019, 49, 1961–1970. [Google Scholar] [CrossRef]
- Shen, B.; Wang, Z.; Wang, D.; Luo, J.; Pu, H.; Peng, Y. Finite-horizon filtering for a class of nonlinear time-delayed systems with an energy harvesting sensor. Automatica 2019, 100, 144–152. [Google Scholar] [CrossRef]
- Shen, B.; Wang, Z.; Tan, H. Guaranteed cost control for uncertain nonlinear systems with mixed time-delays: The discrete-time case. Eur. J. Control 2018, 40, 62–67. [Google Scholar] [CrossRef]
- Dong, H.; Wang, Z.; Gao, H. Robust H∞ Filtering for a Class of Nonlinear Networked Systems with Multiple Stochastic Communication Delays and Packet Dropouts. IEEE Trans. Signal Process. 2010, 58, 1957–1966. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Liu, S.; Gao, H. A variance-constrained approach to recursive state estimation for time-varying complex networks with missing measurements. Automatica 2016, 64, 155–162. [Google Scholar] [CrossRef]
- Hou, N.; Wang, Z.; Shen, Y.; Liu, H.; Dong, H. A non-fragile approach to fault estimation for a class of multi-rate systems under binary encoding schemes. Int. J. Robust Nonlinear Control 2023, 34, 751–772. [Google Scholar] [CrossRef]
- Gao, Y.; Ma, L.; Zhang, M.; Guo, J.; Bo, Y. Distributed Set-Membership Filtering for Nonlinear Time-Varying Systems with Dynamic Coding-Decoding Communication Protocol. IEEE Syst. J. 2022, 16, 2958–2967. [Google Scholar] [CrossRef]
- Qu, B.; Wang, Z.; Shen, B.; Dong, H.; Zhang, X. Secure Particle Filtering with Paillier Encryption–Decryption Scheme: Application to Multi-Machine Power Grids. IEEE Trans. Smart Grid 2024, 15, 863–873. [Google Scholar] [CrossRef]
- Li, X.; Song, J.B.; Hou, N.; Dai, D.; Yang, F. Finite-horizon distributed set-membership filtering with dynamical bias and DoS attacks under binary encoding schemes. Inf. Sci. 2023, 641, 412–421. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z. Moving-Horizon Estimation for Linear Dynamic Networks with Binary Encoding Schemes. IEEE Trans. Autom. Control 2021, 66, 1763–1770. [Google Scholar] [CrossRef]
- Chen, S.; Ma, L.; Ma, Y. Distributed set-membership filtering for nonlinear systems subject to round-robin protocol and stochastic communication protocol over sensor networks. Neurocomputing 2020, 385, 13–21. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Z.; Gao, H. Set-membership filtering for time-varying systems with mixed time-delays under Round-Robin and Weighted Try-Once-Discard protocols. Automatica 2016, 74, 341–348. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Z.; Shen, B.; Dong, H. Moving horizon estimation over relay channels: Dealing with packet losses. Automatica 2023, 155, 123–131. [Google Scholar] [CrossRef]
- Hou, N.; Wang, Z.; Dong, H.; Hu, J.; Liu, X. Sensor Fault Estimation for Nonlinear Complex Networks with Time Delays Under Saturated Innovations: A Binary Encoding Scheme. IEEE Trans. Netw. Sci. Eng. 2022, 9, 4171–4183. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z.; Dong, H.; Jiang, C. Remote Estimation for Energy Harvesting Systems Under Multiplicative Noises: A Binary Encoding Scheme with Probabilistic Bit Flips. IEEE Trans. Autom. Control 2022, 68, 343–354. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Z.; Dong, H.; Shen, B.; Chen, Y. Quadratic filtering for discrete time-varying non-Gaussian systems under binary encoding schemes. Automatica 2023, 158, 731–745. [Google Scholar] [CrossRef]
- Yaz, E. Linear Matrix Inequalities In System And Control Theory. Proc. IEEE 1998, 86, 2473–2474. [Google Scholar] [CrossRef]
- Ghaoui, L.; Calafiore, G. Robust filtering for discrete-time systems with bounded noise and parametric uncertainty. IEEE Trans. Autom. Control 2001, 46, 1084–1089. [Google Scholar] [CrossRef]
- Milanese, M.; Vicino, A. Estimation theory for nonlinear models and set membership uncertainty. Automatica 1991, 27, 403–408. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimation Approach | Calculated Load (s) | MSE of the Sway Velocity | MSE of the Yaw Velocity | MSE of the Roll Velocity |
|---|---|---|---|---|
| Traditional approach | 8.950 | 2.0174 | 0.8040 | 58.4744 |
| Our approach | 8.574 | 0.1414 | 0.2143 | 3.3266 |
| Estimation Approach | Calculated Load (s) | MSE of the Sway Velocity | MSE of the Yaw Velocity | MSE of the Roll Velocity |
|---|---|---|---|---|
| Traditional approach | 9.352 | 0.2558 | 0.8259 | 1.6437 |
| Our approach | 8.906 | 0.1414 | 0.2144 | 0.6446 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Lou, P.; Wang, Y.; Li, J.; Wang, J. Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework. Sensors 2024, 24, 6834. https://doi.org/10.3390/s24216834
Wang Z, Lou P, Wang Y, Li J, Wang J. Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework. Sensors. 2024; 24(21):6834. https://doi.org/10.3390/s24216834
Chicago/Turabian StyleWang, Ziyang, Peng Lou, Yudong Wang, Juan Li, and Jiasheng Wang. 2024. "Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework" Sensors 24, no. 21: 6834. https://doi.org/10.3390/s24216834
APA StyleWang, Z., Lou, P., Wang, Y., Li, J., & Wang, J. (2024). Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework. Sensors, 24(21), 6834. https://doi.org/10.3390/s24216834