Research on the Motion Control Strategy of a Lower-Limb Exoskeleton Rehabilitation Robot Using the Twin Delayed Deep Deterministic Policy Gradient Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- The development of a trajectory planning controller for the LLERR, using the TD3 algorithm. This controller is responsible for generating the desired motion trajectory for the hip and knee joints of the LLERR.
- (2)
- The development of a tracking controller for the LLERR using the TD3 algorithm. This controller aims to regulate the movement of the hip (knee) joint of the LLERR to follow a specified motion trajectory accurately, facilitating the execution of up-stairs movements.
- (3)
- The study involves performing motion planning and tracking experiments using the LLERR to showcase the efficacy of the TD3 algorithm and the dependability of the LLERR control system, as supported by the experimental findings.
2. Mathematical Model
- (1)
- The LLERR s’ exoskeleton was assumed to only move in the sagittal plane.
- (2)
- The thigh (calf) was assumed to be concentrated at its center of point.
- (3)
- We simplified the foot sole to a mass point, disregarding its specific shape.
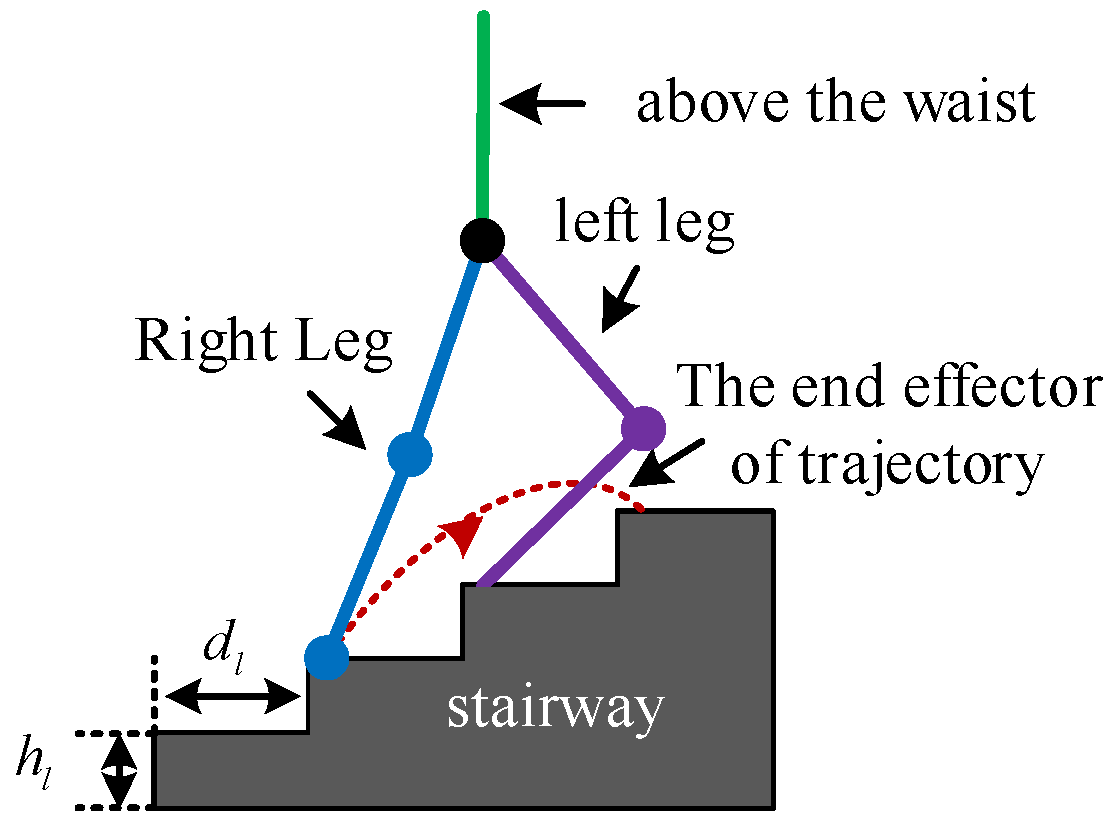
2.1. Environmental Model
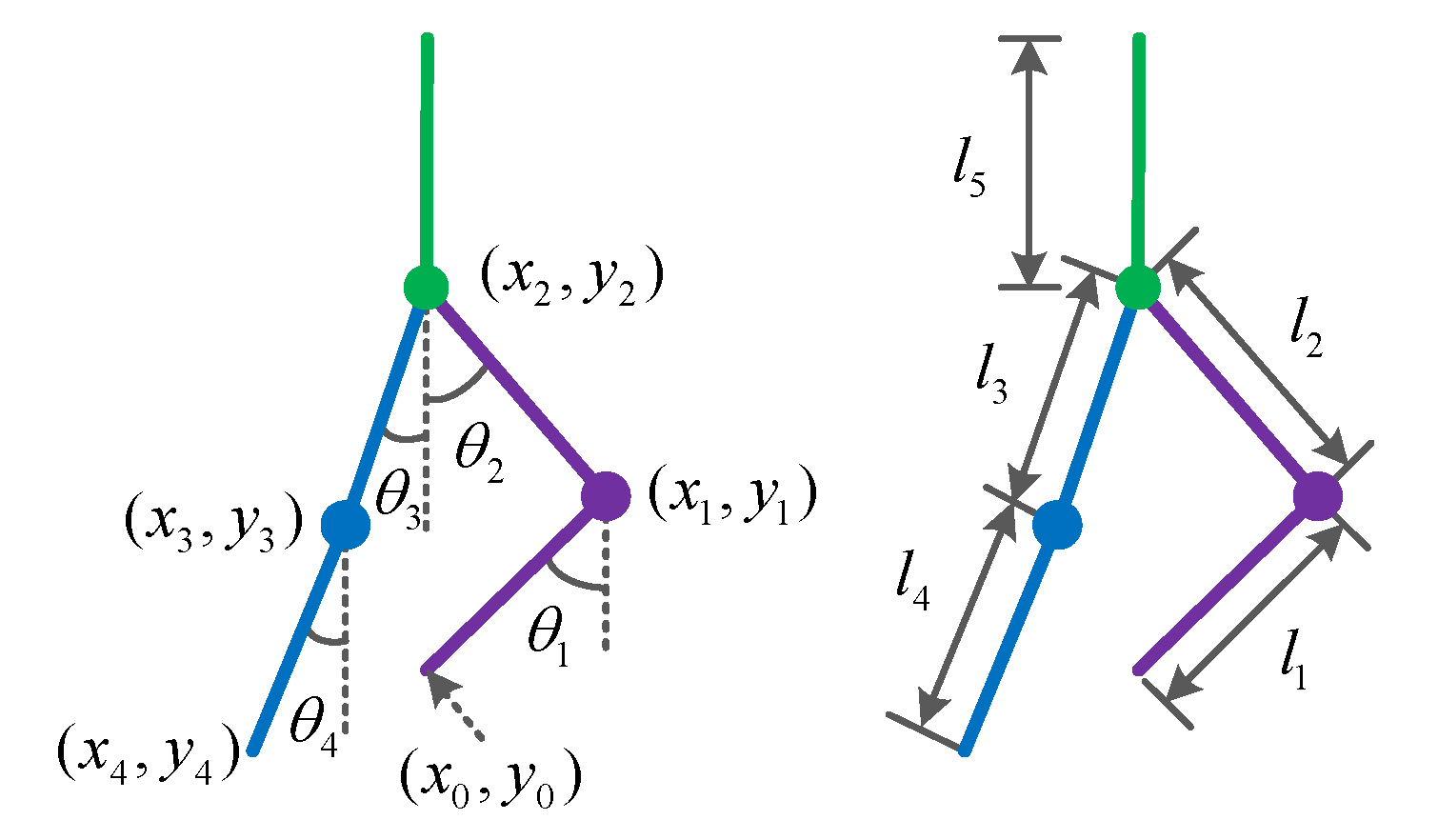
2.2. Lower-Limb Exoskeleton Rehabilitation Robot Model
3. Motion Trajectory Planning and Control for a Lower-Limb Exoskeleton Rehabilitation Robot
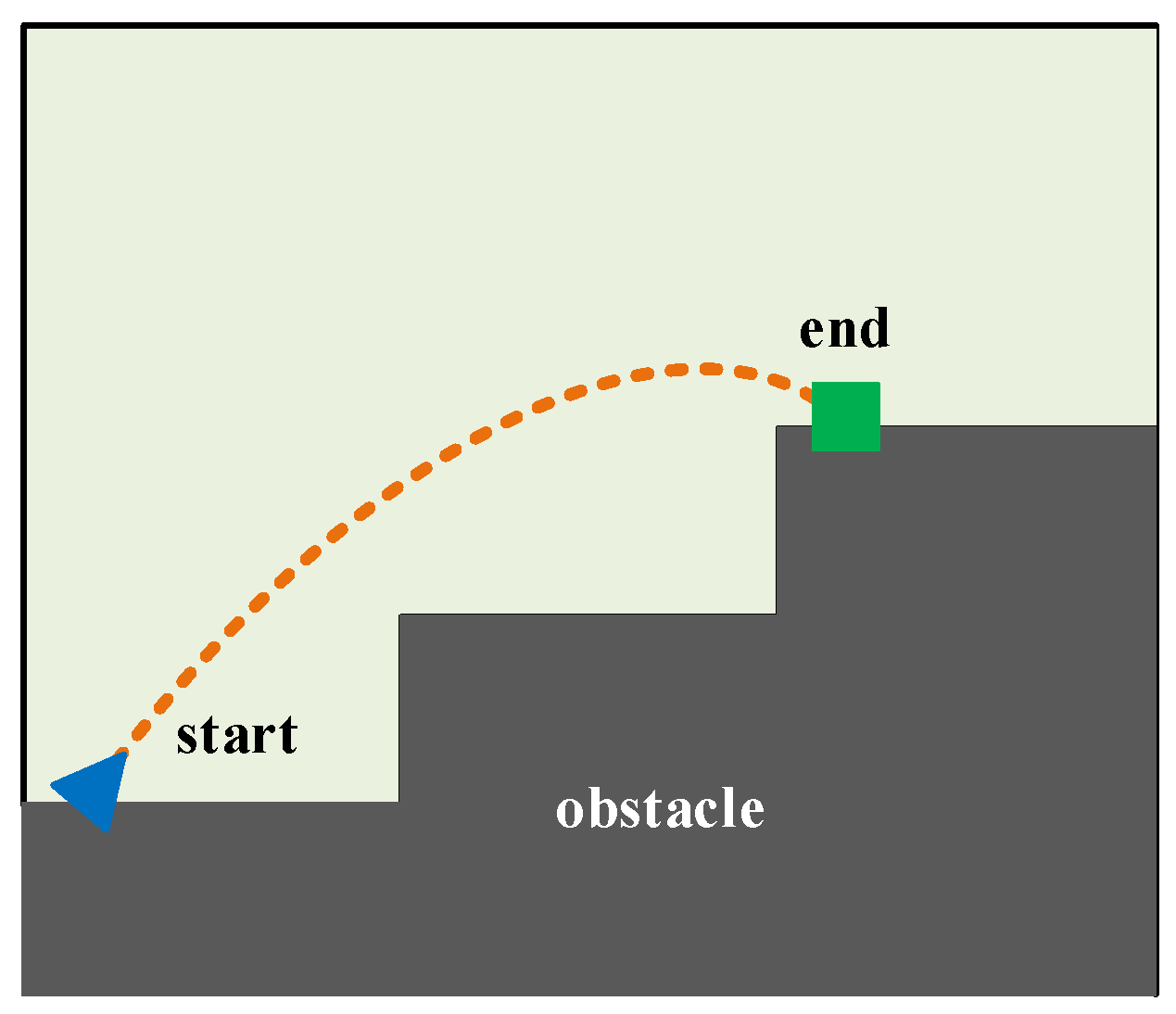
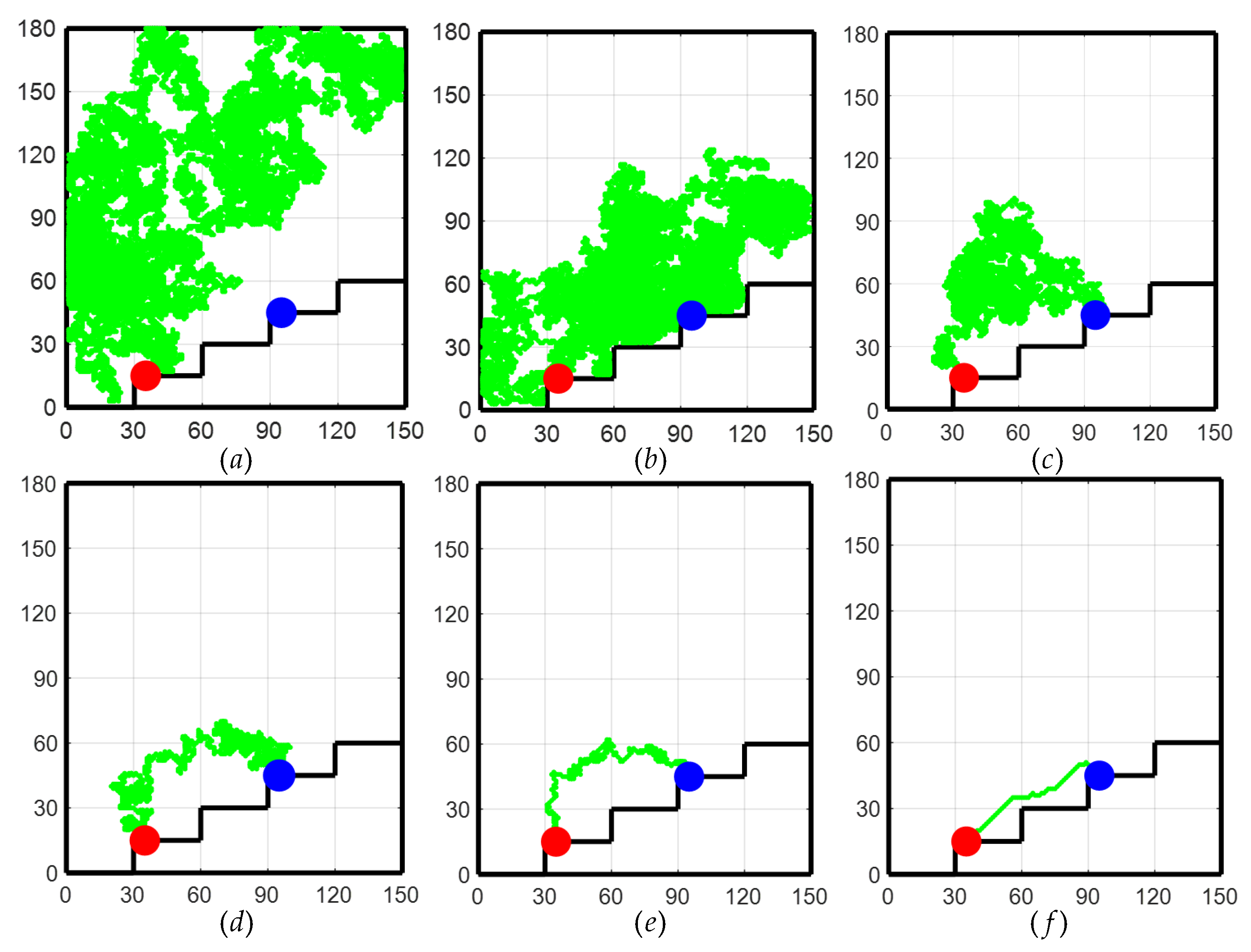
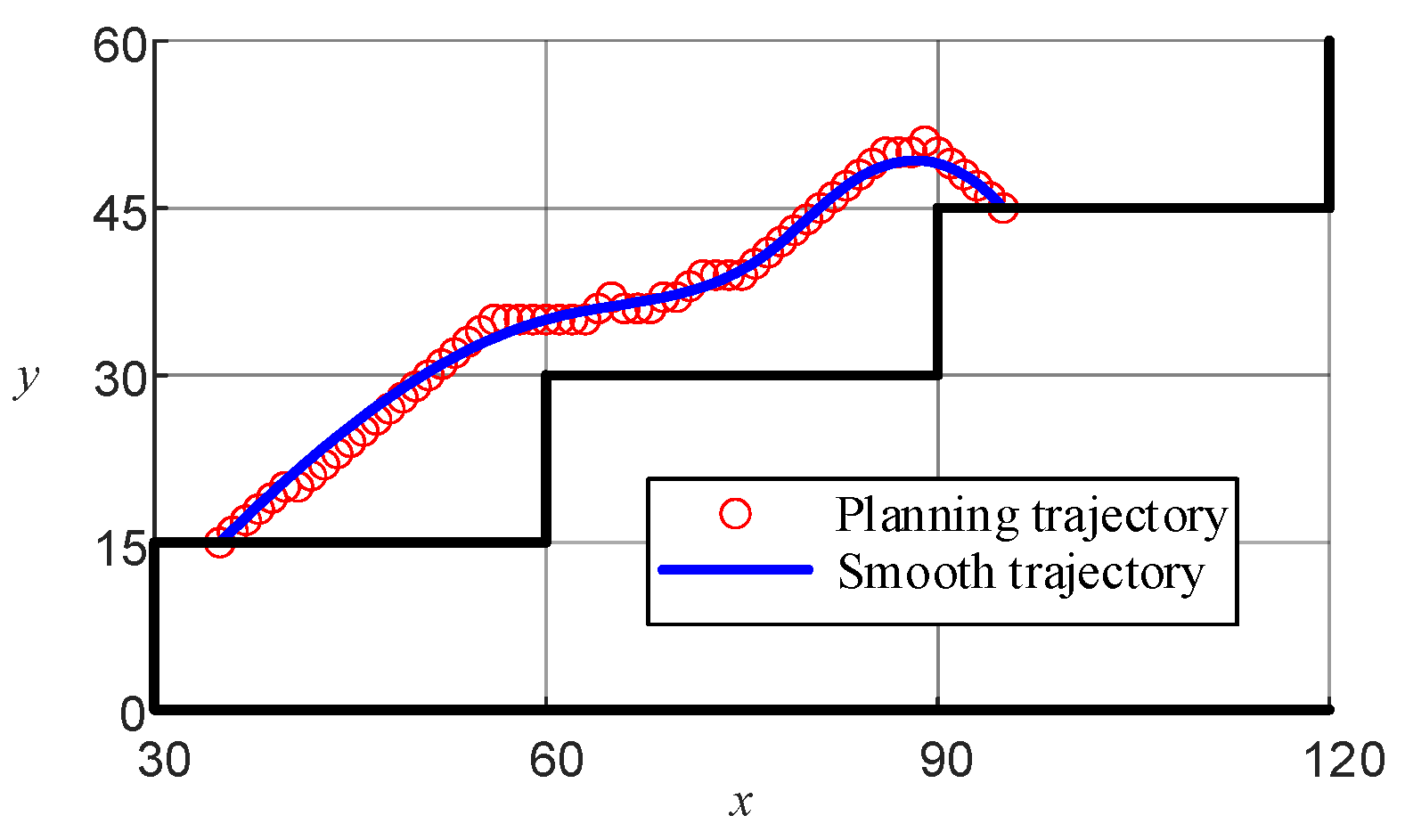
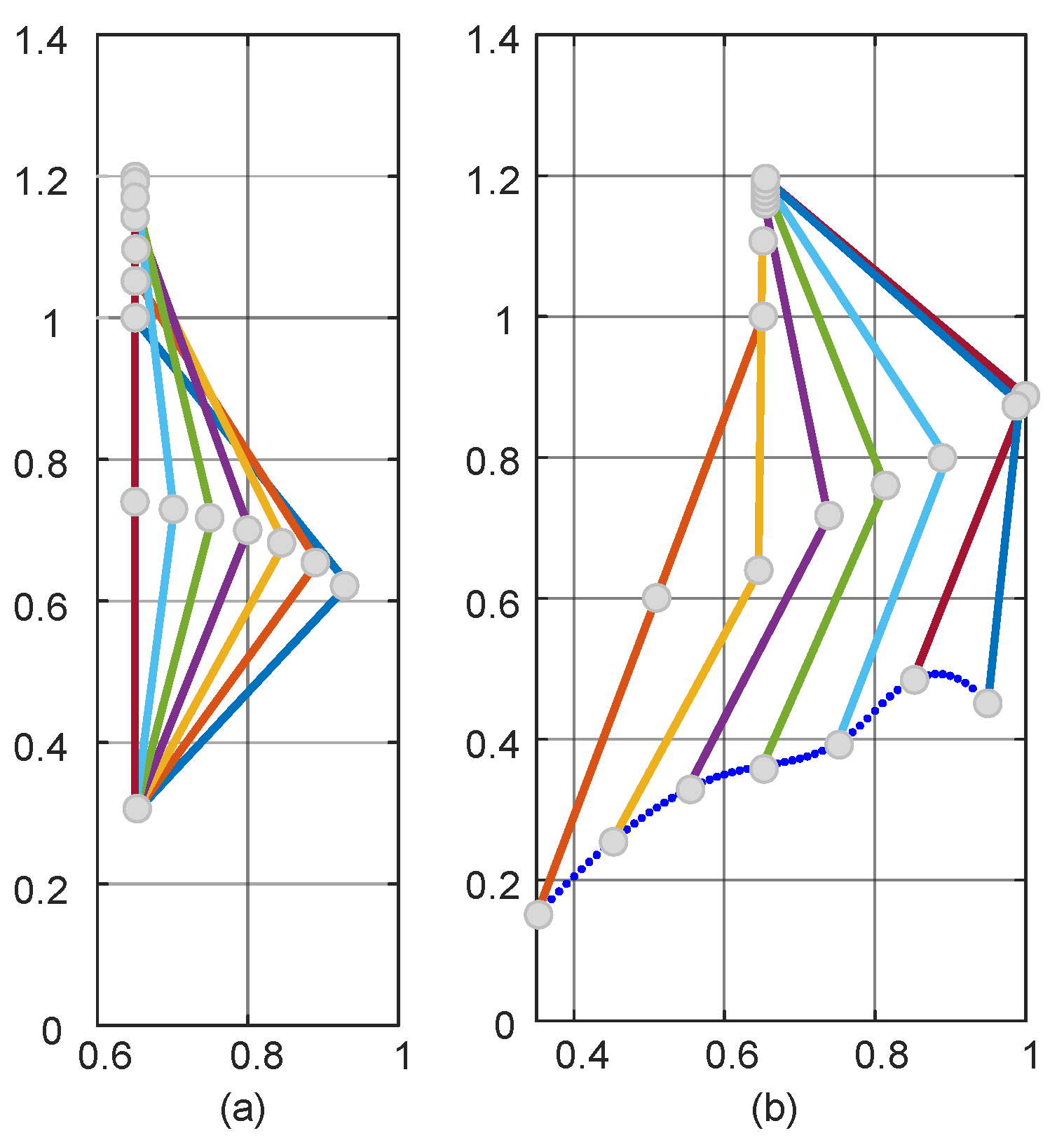
3.1. Motion Path Planning for the Right-Foot Sole
| Algorithm 1 Planning the path of the point U | |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | for k = 1 to K do |
| 6 | |
| 7 | |
| 8 | by Equations (18) and (19) |
| 9 | are learned through Equation (20) |
| 10 | is learned through Equation (21) |
| 11 | if k mod d, then |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | end if |
| 17 | end for |
| 18 | |
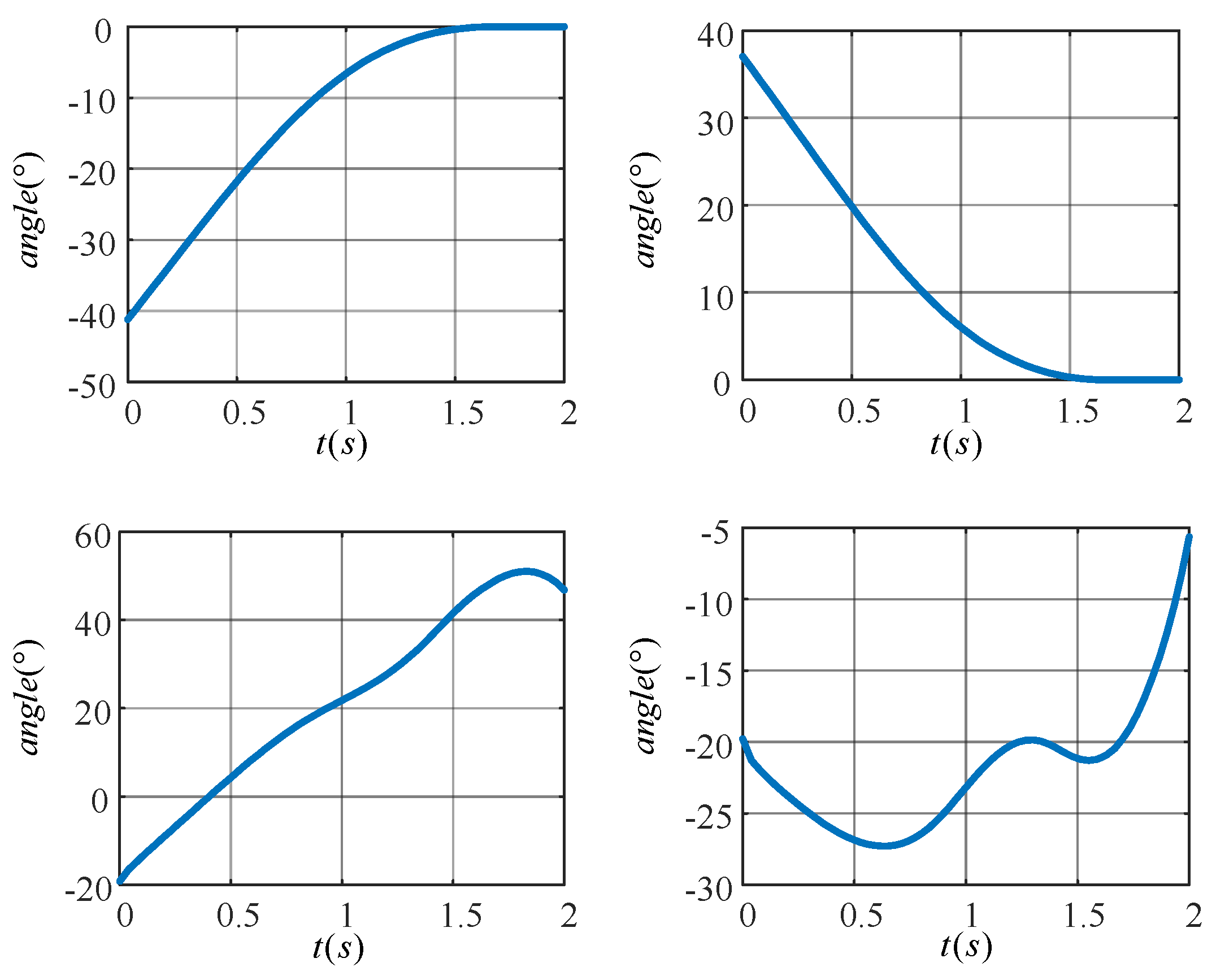
3.2. Calculation of Angular Curves of Lower-Limb Motion Joints
3.3. Motion Trajectory Tracking Control of a Lower-Limb Exoskeleton Rehabilitation Robot
| Algorithm 2 Motion control of a lower-limb exoskeleton rehabilitation robot | |
| 1 | initial and target angles. |
| 2 | |
| 3 | |
| 4 | |
| 5 | for k = 1 to K do |
| 6 | |
| 7 | and obtain 0 |
| 8 | by Equations (18) and (19) |
| 9 | are learned through Equation (20) |
| 10 | is learned through Equation (21) |
| 11 | if k mod d, then |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | end if |
| 17 | end for |
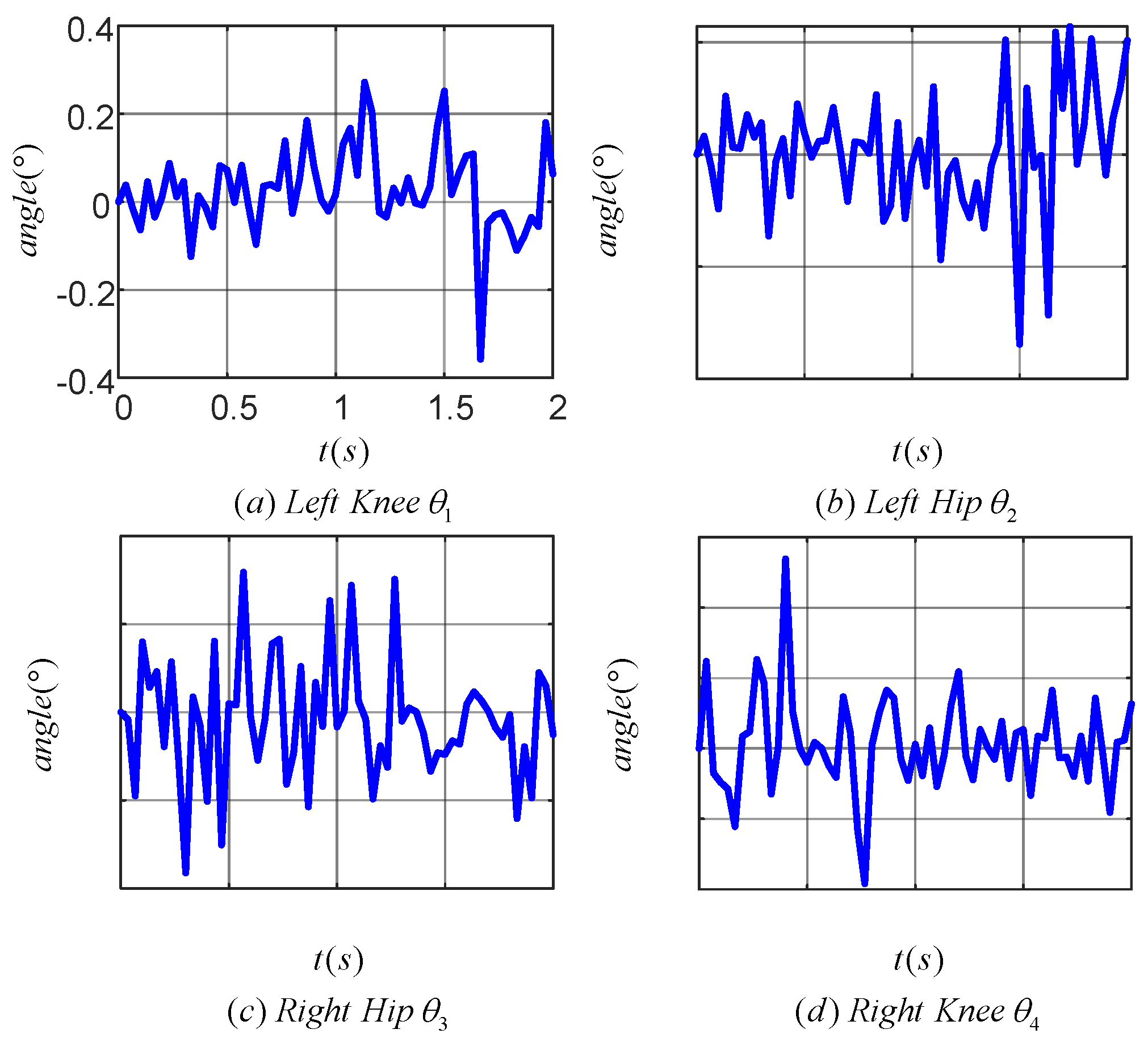
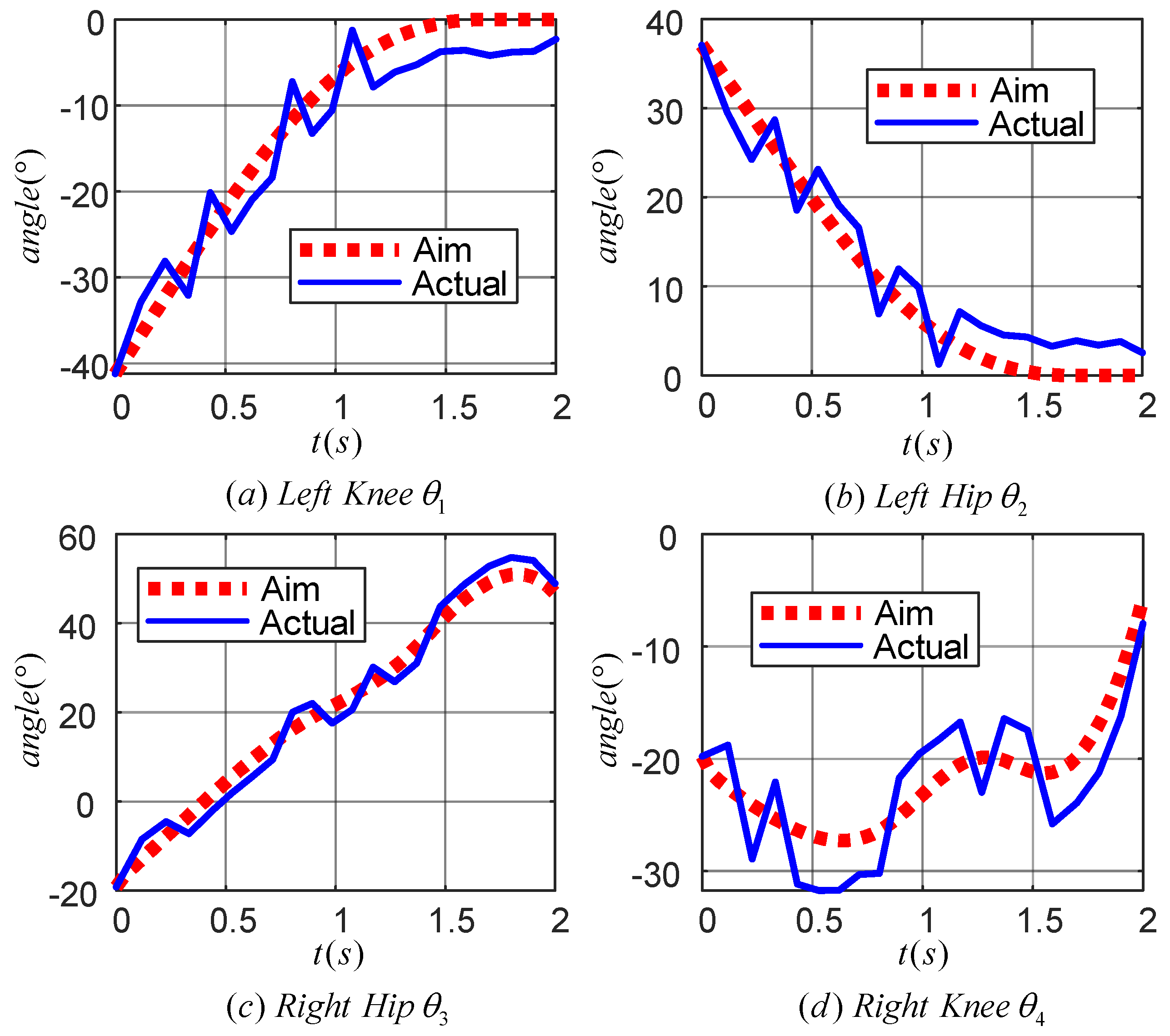
| 18 | were inputted into the lower-limb exoskeleton rehabilitation robot to enable it to accurately track the target motion trajectory shown in Figure 12. The patient’s lower limb was successfully trained to climb the stairs in a single cycle. |
4. Prototype Experiment of Lower-Limb Exoskeleton Rehabilitation Robot
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stewart, C.E.; Sharples, A.P. Aging, Skeletal Muscle, and Epigenetics. Plast. Reconstr. Surg. 2022, 150, 27S–33S. [Google Scholar] [CrossRef] [PubMed]
- Béjot, Y.; Duloquin, G.; Graber, M.; Garnier, L.; Mohr, S.; Giroud, M. Current characteristics and early functional outcome of older stroke patients: A population-based study (Dijon Stroke Registry). Age Ageing 2021, 50, 898–905. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.K.; Wei, J.N.; Wu, X.P. Effects of whole-body vibration training on lower limb motor function and neural plasticity in patients with stroke: Protocol for a randomised controlled clinical trial. BMJ Open 2022, 12, 9. [Google Scholar] [CrossRef] [PubMed]
- Matuja, S.S.; Ngimbwa, J.; Andrew, L.; Shindika, J.; Nchasi, G.; Kasala, A.; Paul, I.K.; Ndalahwa, M.; Mawazo, A.; Kalokola, F.; et al. Stroke characteristics and outcomes in urban Tanzania: Data from the Prospective Lake Zone Stroke Registry. Int. J. Stroke 2024, 19, 536–546. [Google Scholar] [CrossRef]
- Xu, Q.; Lei, L.; Lin, Z.G.; Zhong, W.M.; Wu, X.H.; Zheng, D.Z.; Li, T.B.; Huang, J.Y.; Yan, T.B. An machine learning model to predict quality of life subtypes of disabled stroke survivors. Ann. Clin. Transl. Neurol. 2024, 11, 404–413. [Google Scholar] [CrossRef]
- Liu, B.L.; Gao, D.M.; An, W.H.; Zeng, F.S.; Cui, B.J.; Huang, L.G. Safety and effectiveness of rehabilitation training for stroke complicated with muscular call vein thrombosis: An observational study. Medicine 2023, 102, 5. [Google Scholar] [CrossRef]
- Wang, J.; Ma, R.; Qu, Y. Progress of Telerehabilitation Techniques in Stroke Patients with Lower Extremity Dysfunction. Chin. J. Med. Instrum. 2019, 43, 188–191. [Google Scholar]
- Shi, D.; Wang, L.D.; Zhang, Y.Q.; Zhang, W.X.; Xiao, H.; Ding, X.L. Review of human-robot coordination control for rehabilitation based on motor function evaluation. Front. Mech. Eng. 2022, 17, 14. [Google Scholar] [CrossRef]
- Xue, X.L.; Yang, X.W.; Tu, H.; Liu, W.N.; Kong, D.Z.; Fan, Z.H.; Deng, Z.Y.; Li, N. The improvement of the lower limb exoskeletons on the gait of patients with spinal cord injury A protocol for systematic review and meta-analysis. Medicine 2022, 101, 6. [Google Scholar] [CrossRef]
- Guo, Z.; Ye, J.; Zhang, S.S.; Xu, L.S.; Chen, G.; Guan, X.; Li, Y.Q.; Zhang, Z.M. Effects of Individualized Gait Rehabilitation Robotics for Gait Training on Hemiplegic Patients: Before-After Study in the Same Person. Front. Neurorobot. 2022, 15, 10. [Google Scholar] [CrossRef]
- Portaro, S.; Ciatto, L.; Raciti, L.; Aliberti, E.; Aliberti, R.; Naro, A.; Calabro, R.S. A Case Report on Robot-Aided Gait Training in Primary Lateral Sclerosis Rehabilitation: Rationale, Feasibility and Potential Effectiveness of a Novel Rehabilitation Approach. Innov. Clin. Neurosci. 2021, 18, 15–19. [Google Scholar] [PubMed]
- Lu, Y.; Cao, Y.D.; Chen, Y.; Li, H.; Li, W.H.; Du, H.P.; Zhang, S.W.; Sun, S.S. Investigation of a wearable piezoelectric-IMU multi-modal sensing system for real-time muscle force estimation. Smart Mater. Struct. 2023, 32, 11. [Google Scholar] [CrossRef]
- Hampshire, L.; Dehghani-Sanij, A.; O’Connor, R.J. Restorative rehabilitation robotics to promote function, independence and dignity: Users’ perspectives on clinical applications. J. Med. Eng. Technol. 2022, 46, 527–535. [Google Scholar] [CrossRef]
- Tao, J.; Yu, S.R. Developing Conceptual PSS Models of Upper Limb Exoskeleton based Post-stroke Rehabilitation in China. Procedia CIRP 2019, 80, 750–755. [Google Scholar] [CrossRef]
- Tsuji, Y. A Safety Review of Medical Device Robots in JAPAN. Asia Pac. J. Health Law Ethics 2018, 12, 1–27. [Google Scholar]
- Song, W.K. Trends in Rehabilitation Robots and Their Translational Research in National Rehabilitation Center, Korea. Biomed. Eng. Lett. (BMEL) 2016, 6, 1–9. [Google Scholar] [CrossRef]
- Van Hedel, H.J.A.; Rosselli, I.; Baumgartner-Ricklin, S. Clinical utility of the over-ground bodyweight-supporting walking system Andago in children and youths with gait impairments. J. Neuroeng. Rehabil. 2021, 18, 20. [Google Scholar] [CrossRef]
- Zhang, F.; Li, K.; Wu, D.L.; Chen, P.R.; Dou, Z.L. Therapeutic effect of AiWalker on balance and walking ability in patients with stroke: A pilot study. Top. Stroke Rehabil. 2021, 28, 236–240. [Google Scholar] [CrossRef]
- Li, D.X.; Zha, F.B.; Long, J.J.; Liu, F.; Cao, J.; Wang, Y.L. Effect of Robot Assisted Gait Training on Motor and Walking Function in Patients with Subacute Stroke: A Random Controlled Study. J. Stroke Cerebrovasc. Dis. 2021, 30, 6. [Google Scholar] [CrossRef]
- Glowinski, S.; Krzyzynski, T. An inverse kinematic algorithm for the human leg. J. Theor. Appl. Mech. 2016, 54, 53–61. [Google Scholar] [CrossRef]
- Chen, Z.L.; Guo, Q.; Li, T.S.; Yan, Y.; Jiang, D. Gait Prediction and Variable Admittance Control for Lower Limb Exoskeleton With Measurement Delay and Extended-State-Observer. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 8693–8706. [Google Scholar] [CrossRef]
- Zhou, J.; Li, Z.J.; Li, X.M.; Wang, X.Y.; Song, R. Human-Robot Cooperation Control Based on Trajectory Deformation Algorithm for a Lower Limb Rehabilitation Robot. IEEE-ASME Trans. Mechatron. 2021, 26, 3128–3138. [Google Scholar] [CrossRef]
- Xu, J.J.; Xu, L.S.; Ji, A.H.; Cao, K. Learning robotic motion with mirror therapy framework for hemiparesis rehabilitation. Inf. Process. Manag. 2023, 60, 16. [Google Scholar] [CrossRef]
- Ko, S. A Study of Artificial Intelligence Robots as Legal Subjects. J. Prop. Law 2020, 37, 1–23. [Google Scholar]
- Li, G.X.; Li, Z.J.; Su, C.Y.; Xu, T. Active Human-Following Control of an Exoskeleton Robot With Body Weight Support. IEEE Trans. Cybern. 2023, 53, 7367–7379. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.Z.; Wang, H.; Zhou, B.; Wei, C.F.; Xu, S.Q. Continuous and simultaneous estimation of lower limb multi-joint angles from sEMG signals based on stacked convolutional and LSTM models. Expert. Syst. Appl. 2022, 203, 20. [Google Scholar] [CrossRef]
- Zhang, Z.F.; Wang, Z.Y.; Lei, H.; Gu, W.Q. Gait phase recognition of lower limb exoskeleton system based on the integrated network model. Biomed. Signal Process. Control 2022, 76, 13. [Google Scholar] [CrossRef]
- Zhang, Q.; Nalam, V.; Tu, X.K.; Li, M.H.; Si, J.N.; Lewek, M.D.; Huang, H. Imposing Healthy Hip Motion Pattern and Range by Exoskeleton Control for Individualized Assistance. IEEE Robot. Autom. Lett. 2022, 7, 11126–11133. [Google Scholar] [CrossRef]
- Rose, L.; Bazzocchi, M.C.F.; Nejat, G. A model-free deep reinforcement learning approach for control of exoskeleton gait patterns. Robotica 2022, 40, 2189–2214. [Google Scholar] [CrossRef]
- Li, J.G.; Chen, C. Machine learning-based energy harvesting for wearable exoskeleton robots. Sustain. Energy Technol. Assess. 2023, 57, 7. [Google Scholar] [CrossRef]
- Bergmann, L.; Lück, O.; Voss, D.; Buschermöhle, P.; Liu, L.; Leonhardt, S.; Ngo, C. Lower Limb Exoskeleton With Compliant Actuators: Design, Modeling, and Human Torque Estimation. IEEE-ASME Trans. Mechatron. 2023, 28, 758–769. [Google Scholar] [CrossRef]
- Habib, M.; Sadjaad, O. Online gait generator for lower limb exoskeleton robots: Suitable for level ground, slopes, stairs, and obstacle avoidance. Robot. Auton. Syst. 2023, 160, 104319. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; He, M.; Tong, X.; Zhang, M.; Huang, L. Research on the Motion Control Strategy of a Lower-Limb Exoskeleton Rehabilitation Robot Using the Twin Delayed Deep Deterministic Policy Gradient Algorithm. Sensors 2024, 24, 6014. https://doi.org/10.3390/s24186014
Guo Y, He M, Tong X, Zhang M, Huang L. Research on the Motion Control Strategy of a Lower-Limb Exoskeleton Rehabilitation Robot Using the Twin Delayed Deep Deterministic Policy Gradient Algorithm. Sensors. 2024; 24(18):6014. https://doi.org/10.3390/s24186014
Chicago/Turabian StyleGuo, Yifeng, Min He, Xubin Tong, Min Zhang, and Limin Huang. 2024. "Research on the Motion Control Strategy of a Lower-Limb Exoskeleton Rehabilitation Robot Using the Twin Delayed Deep Deterministic Policy Gradient Algorithm" Sensors 24, no. 18: 6014. https://doi.org/10.3390/s24186014
APA StyleGuo, Y., He, M., Tong, X., Zhang, M., & Huang, L. (2024). Research on the Motion Control Strategy of a Lower-Limb Exoskeleton Rehabilitation Robot Using the Twin Delayed Deep Deterministic Policy Gradient Algorithm. Sensors, 24(18), 6014. https://doi.org/10.3390/s24186014